
Computational Evaluation of a Biomimetic Kinetic Façade Inspired by the Venus Flytrap for Daylight and Glare Performance

 ,
,
Abstract
1. Introduction
- −
- How can a decentralized control strategy for unconventional façades improve daylight and enhance visual comfort?
- −
- To what extent does the kinetic façade form generation and precision of angle control improve the occupants’ daylight performance and visual comfort?
2. Literature Review
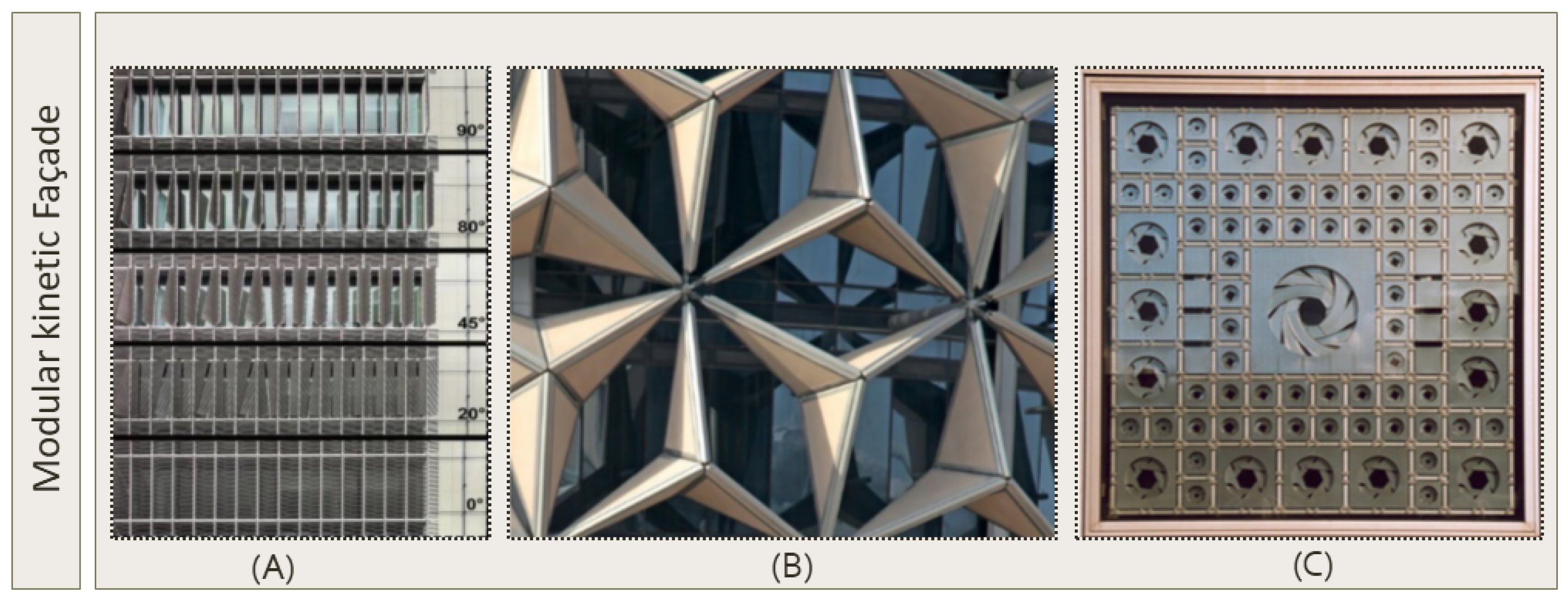
2.1. The State-of-the-Art in Kinetic Façades (Unconventional)
2.2. Biomimetic Insights for Kinetic and Decentralized Movements
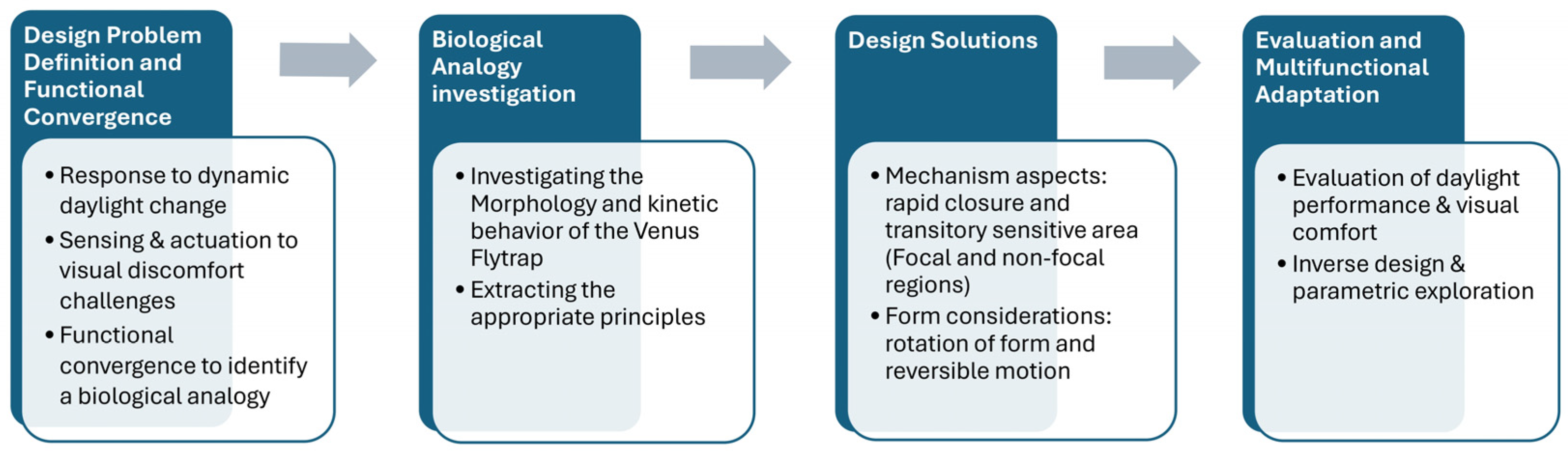
3. Methods
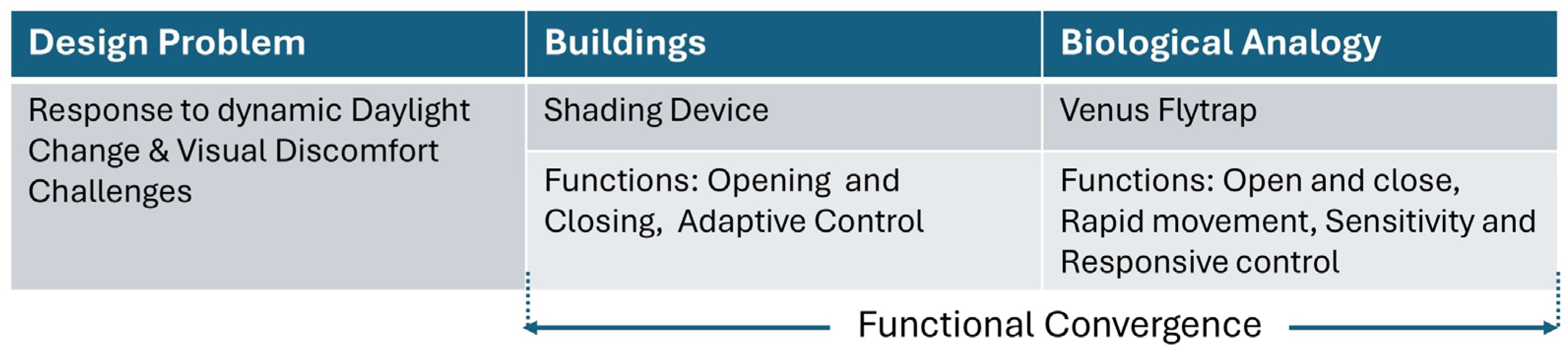
3.1. Design Problem Definition and Functional Convergence
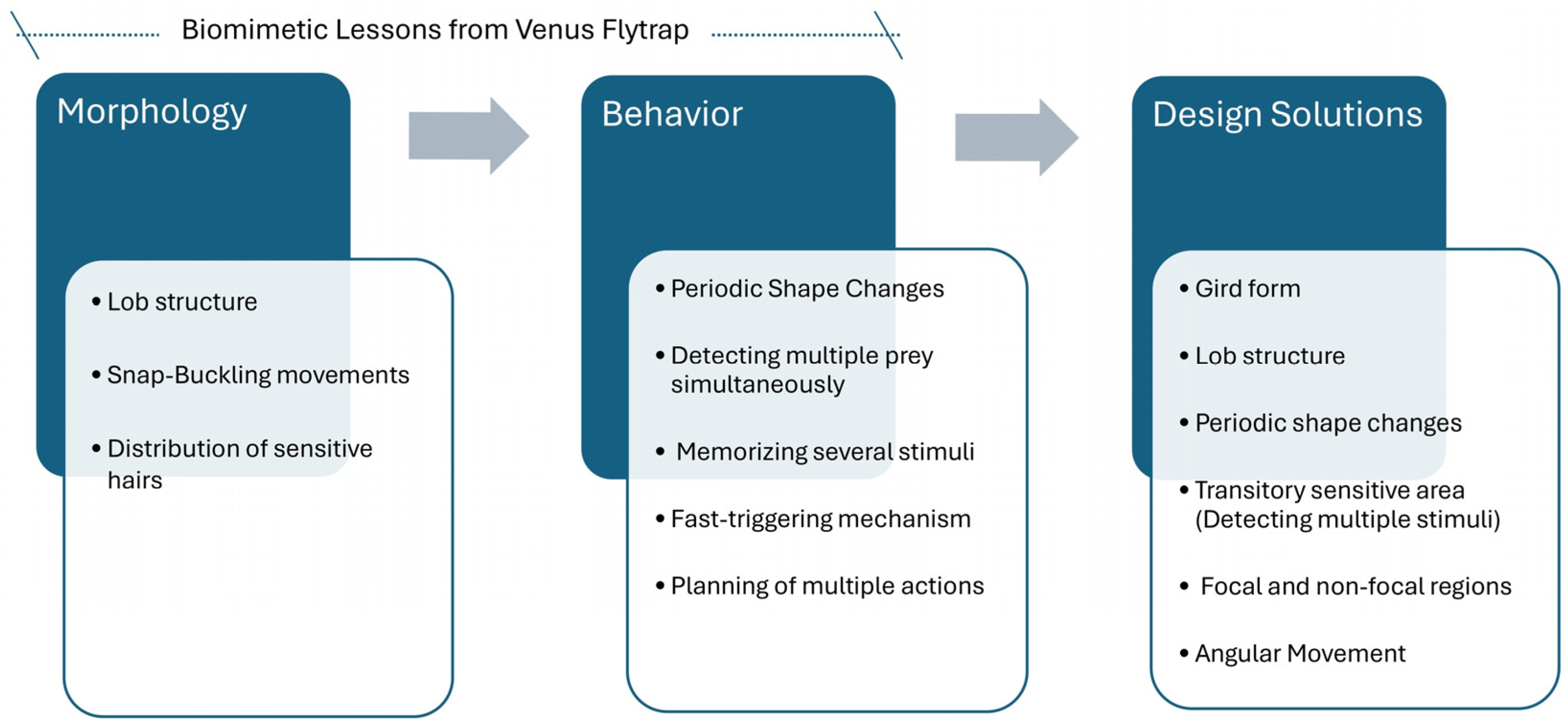
3.2. Biological Analogy Investigation
3.3. Design Solution Development
3.4. Evaluation and Multifunctional Adaptation
4. Case Study
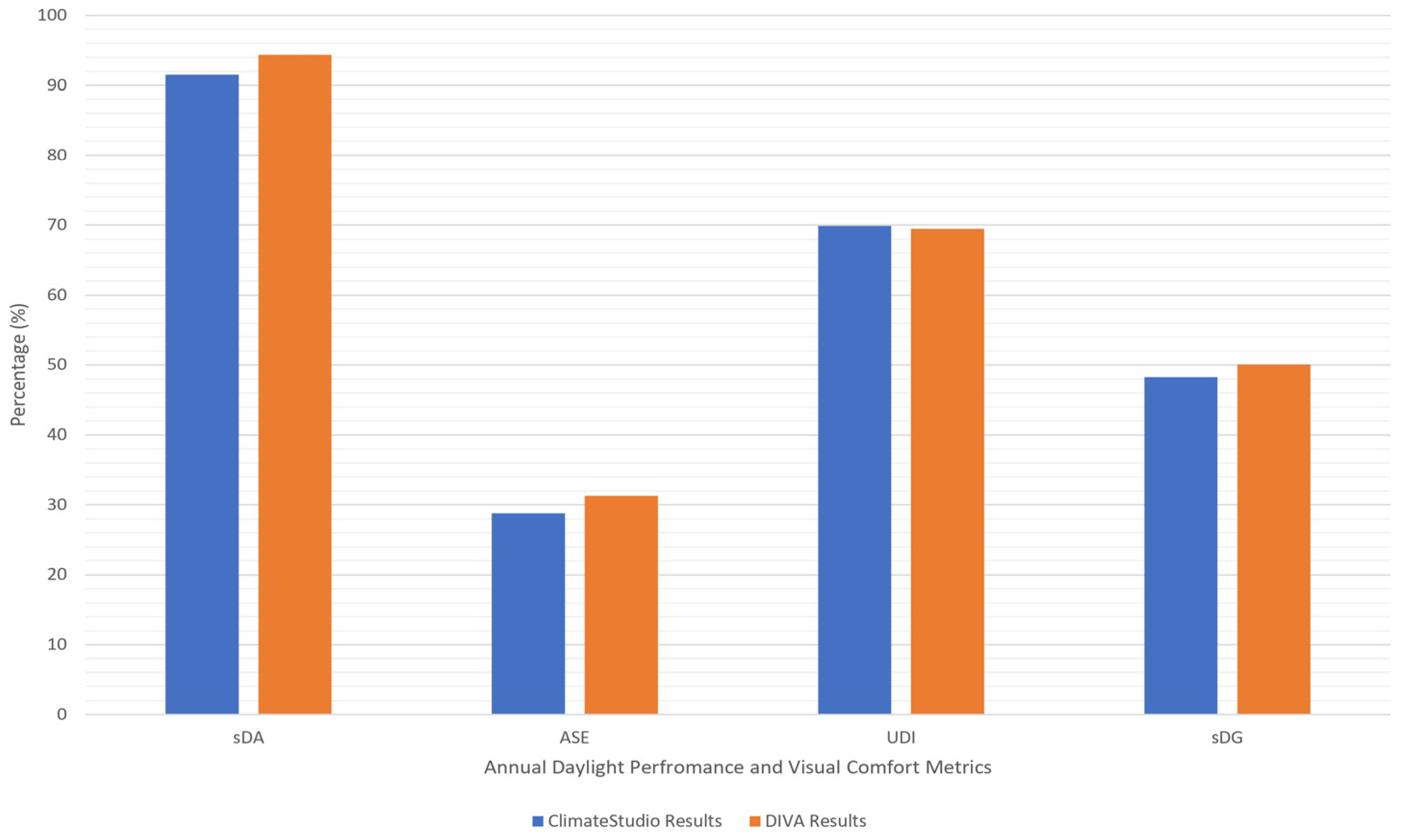
Daylight Simulation Validation
5. Results
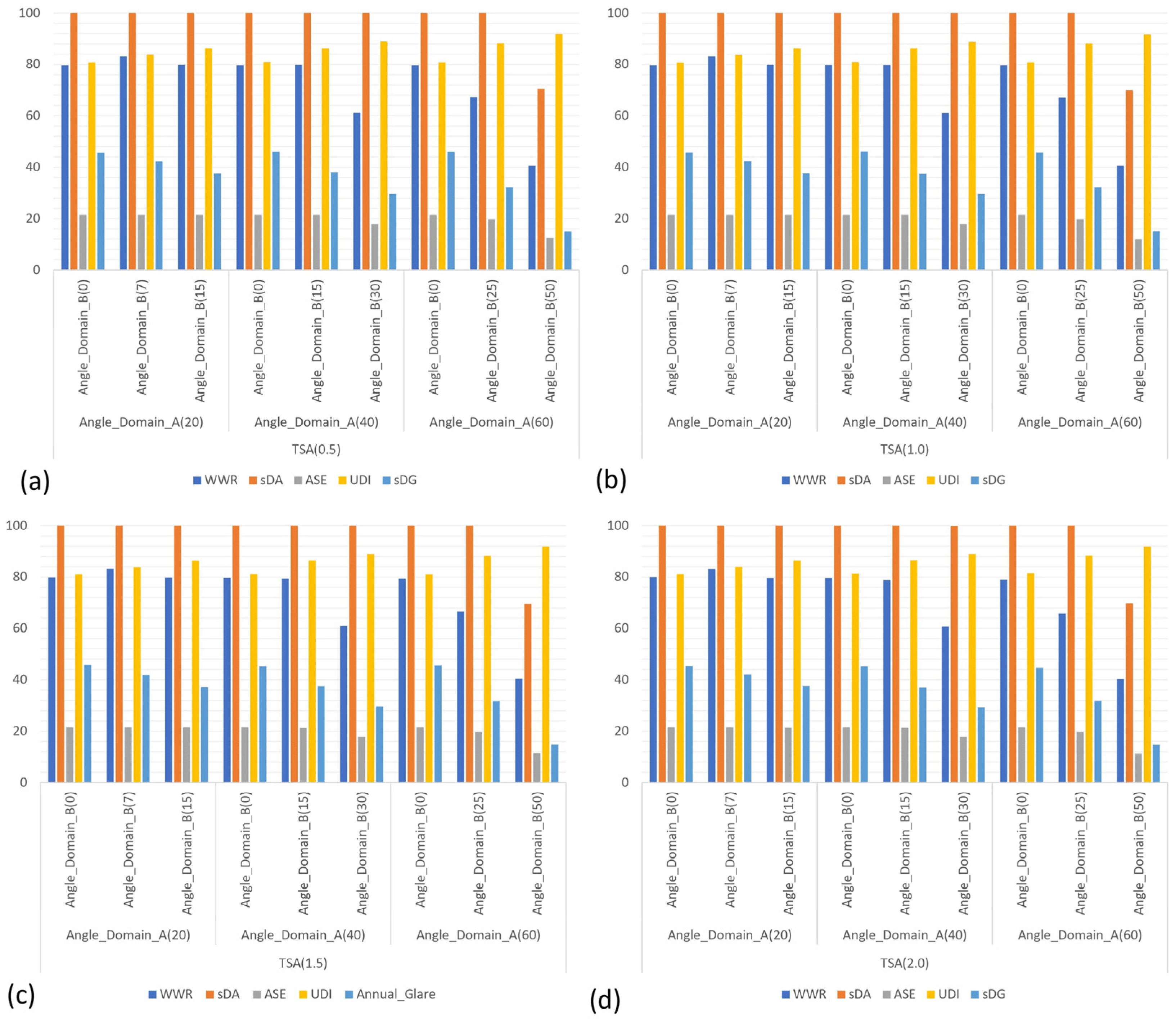
5.1. Performance Analysis Across Angle Domains (A: In the Focal Region, B: Outside the Focal Region) Based on Daylight Performance and Visual Comfort Metrics for TSAs of 0.5, 1, 1.5, and 2
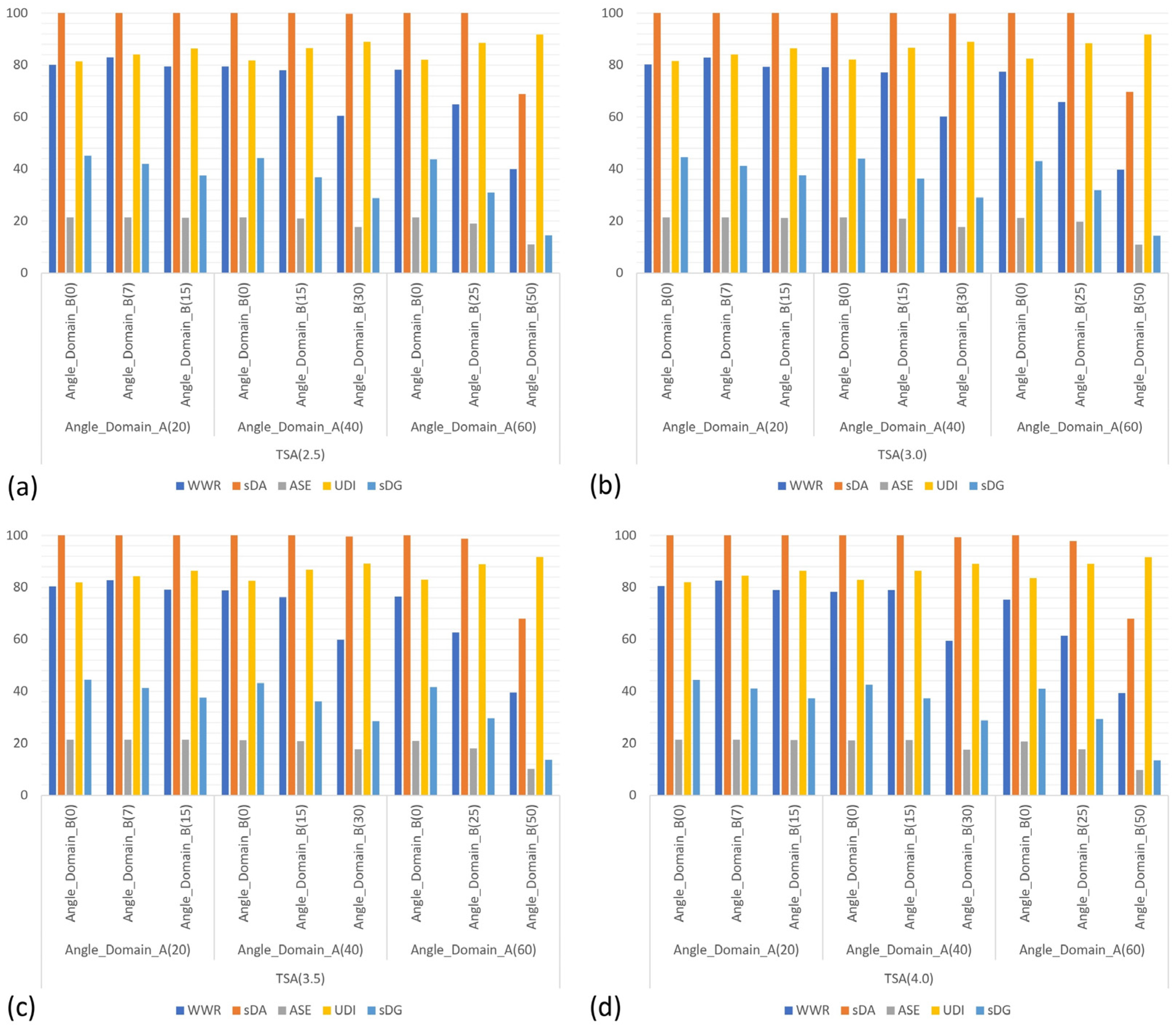
5.2. Performance Analysis Across Angle Domains (A: In the Focal Region, B: Outside the Focal Region) Based on Daylight Performance and Visual Comfort Metrics for TSAs of 2.5, 3, 3.5, and 4
5.3. Performance Analysis Across Angle Domains (A: In the Focal Region, B: Outside the Focal Region) Based on Daylight Performance and Visual Comfort Metrics for TSAs of 4.5, 5, 5.5, and 6
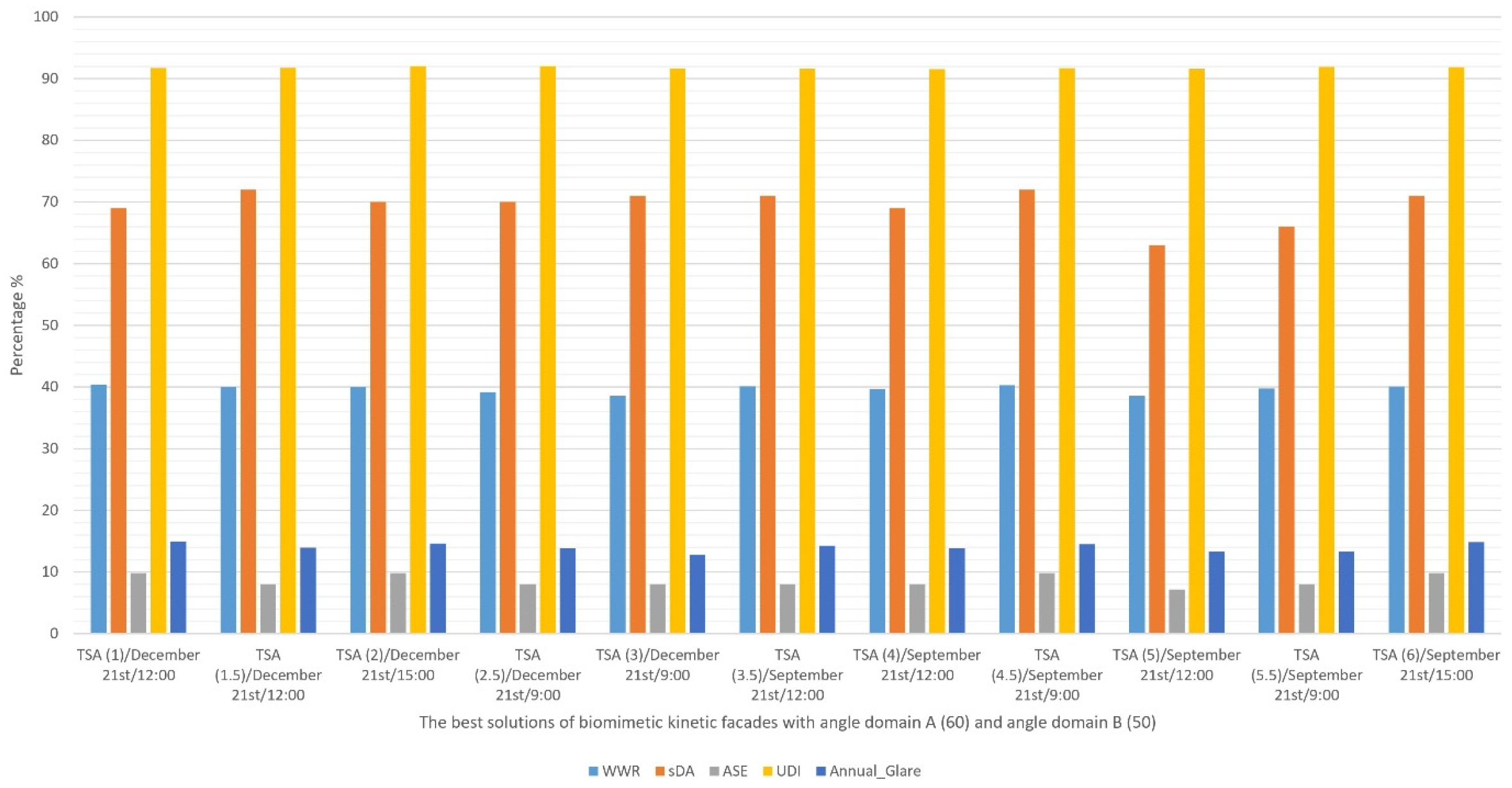
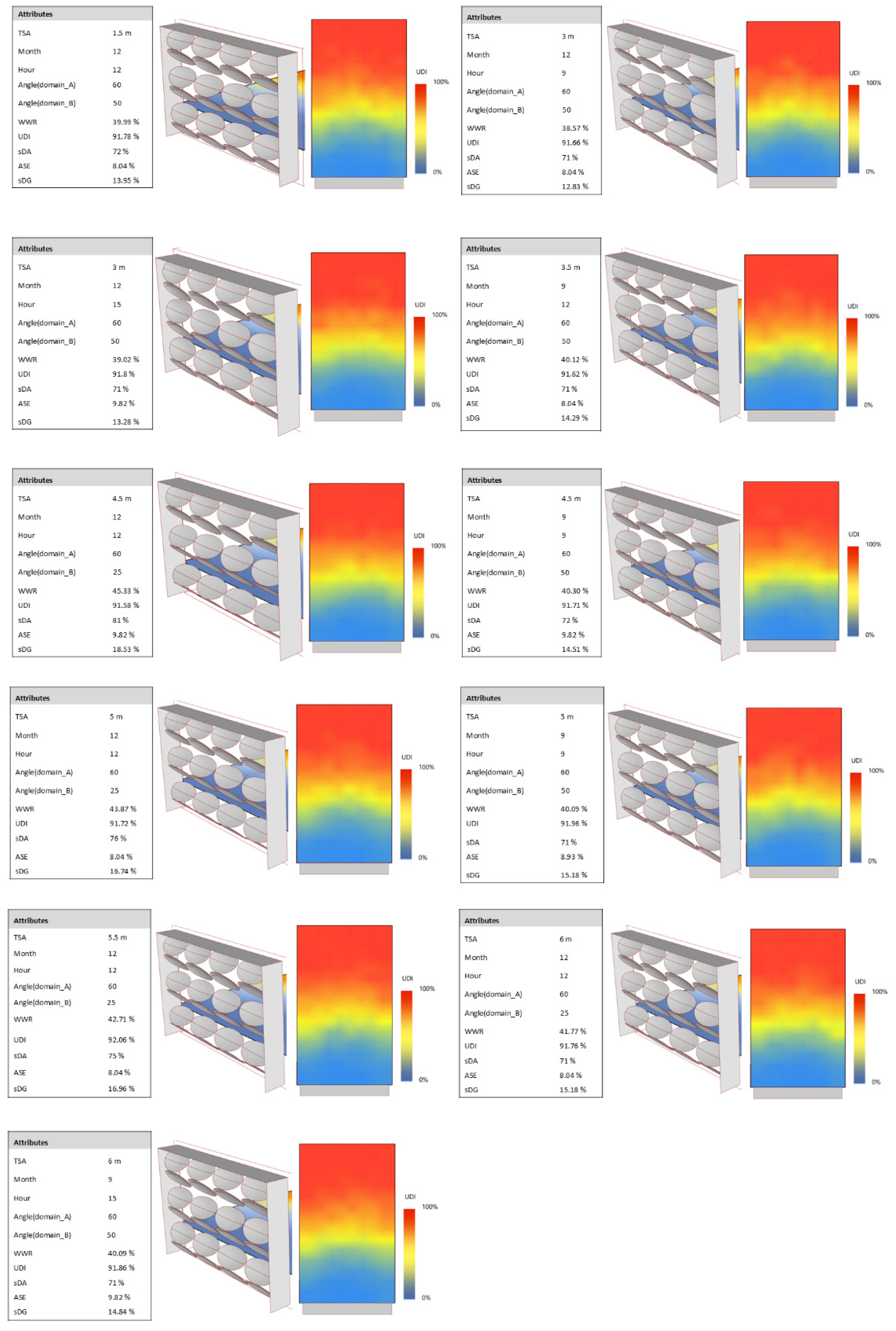
5.4. The Best Biomimetic Kinetic Façade Solutions Based on the Daylight Performance and Visual Comfort Analysis
6. Discussion
6.1. A Simple Decision-Making Framework
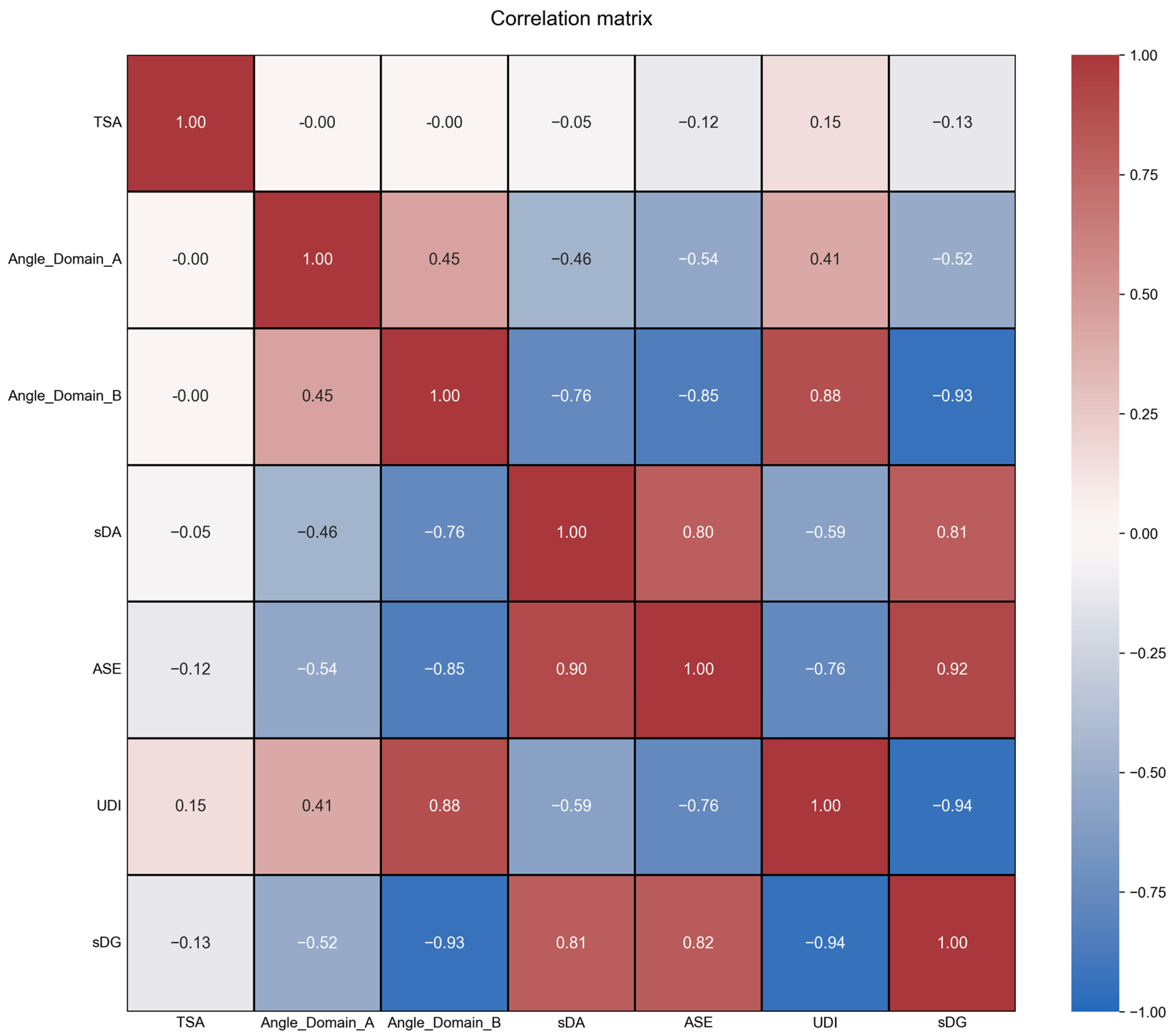
6.2. Correlation Matrix
6.3. Limitations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Taherkhani, R.; Aziminezhad, M. Human-Building Interaction: A Bibliometric Review. Build. Environ. 2023, 242, 110493. [Google Scholar] [CrossRef]
- Sankaewthong, S.; Horanont, T.; Miyata, K.; Karnjana, J.; Busayarat, C.; Xie, H. Using a Biomimicry Approach in the Design of a Kinetic Façade to Regulate the Amount of Daylight Entering a Working Space. Buildings 2022, 12, 2089. [Google Scholar] [CrossRef]
- Sadineni, S.B.; Madala, S.; Boehm, R.F. Passive Building Energy Savings: A Review of Building Envelope Components. Renew. Sustain. Energy Rev. 2011, 15, 3617–3631. [Google Scholar] [CrossRef]
- Dehghan Lotfabad, A.; Hosseini, S.M.; Dabove, P.; Heiranipour, M.; Sommese, F. Impacts of Vertical Greenery on Outdoor Thermal Comfort and Carbon Emission Reduction at the Urban Scale in Turin, Italy. Buildings 2025, 15, 450. [Google Scholar] [CrossRef]
- Zaina, S.M.; Fadli, F.; Hosseini, S.M. Evaluation of smart irrigation systems in hot-arid climates for green roofs and walls: Case of Doha, Qatar. Smart Sustain. Built Environ. 2022, 11, 346–367. [Google Scholar] [CrossRef]
- Loonen, R.C.G.M.; Trčka, M.; Cóstola, D.; Hensen, J.L.M. Climate Adaptive Building Shells: State-of-the-Art and Future Challenges. Renew. Sustain. Energy Rev. 2013, 25, 483–493. [Google Scholar] [CrossRef]
- Shi, F.; Zheng, Y.; Ma, Y. A study of the bionic design of a climate-adaptability building surface. South Archit. 2023, 2, 22–32. [Google Scholar]
- Loonen, R.C.G.M. Bio-Inspired Adaptive Building Skins. In Biotechnologies and Biomimetics for Civil Engineering; Pacheco Torgal, F., Labrincha, J.A., Diamanti, M.V., Yu, C.-P., Lee, H.K., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 115–134. ISBN 978-3-319-09287-4. [Google Scholar]
- Kamalabadi, S.T.; Hosseini, S.M.; Azmoodeh, M. Integration of Bio-Inspired Adaptive Systems for Optimizing Daylight Performance and Glare Control. J. Build. Eng. 2025, 105, 112415. [Google Scholar] [CrossRef]
- Guo, Z.; Ma, Y. Exploration of a Dynamic Building Skin System Responding to Light Environment Information. In Proceedings of the 7th International Conference on Architecture, Materials and Construction, Lisbon, Portugal, 27–29 October 2021; Mendonça, P., Cortiços, N.D., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 91–97. [Google Scholar]
- Zocchi, G.; Hosseini, M.; Triantafyllidis, G. Exploring the Synergy of Advanced Lighting Controls, Building Information Modelling and Internet of Things for Sustainable and Energy-Efficient Buildings: A Systematic Literature Review. Sustainability 2024, 16, 10937. [Google Scholar] [CrossRef]
- Sabry, H.; Sherif, A.; Gadelhak, M.; Aly, M. Balancing the Daylighting and Energy Performance of Solar Screens in Residential Desert Buildings: Examination of Screen Axial Rotation and Opening Aspect Ratio. Sol. Energy 2014, 103, 364–377. [Google Scholar] [CrossRef]
- Meerbeek, B.; te Kulve, M.; Gritti, T.; Aarts, M.; van Loenen, E.; Aarts, E. Building Automation and Perceived Control: A Field Study on Motorized Exterior Blinds in Dutch Offices. Build. Environ. 2014, 79, 66–77. [Google Scholar] [CrossRef]
- Shahin, H.S.M. Adaptive Building Envelopes of Multistory Buildings as an Example of High Performance Building Skins. Alex. Eng. J. 2019, 58, 345–352. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Heidari, S.; Attia, S.; Wang, J.; Triantafyllidis, G. Biomimetic Kinetic Façade as a Real-Time Daylight Control: Complex Form versus Simple Form with Proper Kinetic Behavior. Smart Sustain. Built Environ. 2024; ahead of print. [Google Scholar] [CrossRef]
- Fang, J.; Zhao, Y.; Tian, Z.; Lin, P. Analysis of Dynamic Louver Control with Prism Redirecting Fenestrations for Office Daylighting Optimization. Energy Build. 2022, 262, 112019. [Google Scholar] [CrossRef]
- Masoud, S.; Zamani, Z.; Hosseini, S.M.; Attia, S. A Review of Factors Affecting the Lighting Performance of Light Shelves and Controlling Solar Heat Gain. Buildings 2024, 14, 1832. [Google Scholar] [CrossRef]
- Eltaweel, A.; Su, Y.; Lv, Q.; Lv, H. Advanced Parametric Louver Systems with Bi-Axis and Two-Layer Designs for an Extensive Daylighting Coverage in a Deep-Plan Office Room. Sol. Energy 2020, 206, 596–613. [Google Scholar] [CrossRef]
- Tian, Z.; Zhao, Y.; Fang, J.; Kong, Z. AStudy of Daylight Glare Evaluation with Prism Daylighting Redirecting Fenestrations. J. Build. Eng. 2023, 71, 106428. [Google Scholar] [CrossRef]
- Zhu, L.; Shao, Z.; Sun, Y.; Soebarto, V.; Gao, F.; Zillante, G.; Zuo, J. Indoor Daylight Distribution in a Room with Integrated Dynamic Solar Concentrating Facade. Energy Build. 2018, 158, 1–13. [Google Scholar] [CrossRef]
- Shao, Z.; Wang, B.; Xu, Y.; Sun, L.; Ge, X.; Cai, L.; Chang, C. Dynamic Concentrated Solar Building Skin Design Based on Multiobjective Optimization. Buildings 2022, 12, 2026. [Google Scholar] [CrossRef]
- Rizi, R.A.; Eltaweel, A. A User Detective Adaptive Facade towards Improving Visual and Thermal Comfort. J. Build. Eng. 2021, 33, 101554. [Google Scholar] [CrossRef]
- López, M.; Rubio, R.; Martín, S.; Croxford, B. How Plants Inspire Façades. From plants to architecture: Biomimetic principles for the development of adaptive architectural envelopes. Renew. Sustain. Energy Rev. 2017, 67, 692–703. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Fadli, F.; Mohammadi, M. Biomimetic Kinetic Shading Facade Inspired by Tree Morphology for Improving Occupant’s Daylight Performance. J. Daylighting 2021, 8, 65–82. [Google Scholar] [CrossRef]
- Pawlyn, M. Biomimicry in Architecture, 2nd ed.; RIBA Publishing: London, UK, 2016; ISBN 978-1-85946-628-5. [Google Scholar]
- Benyus, J.M. Biomimicry: Innovation Inspired by Nature, 2nd ed.; Harper Perennial: New York, NY, USA, 2002; ISBN 978-0-06-053322-9. [Google Scholar]
- Badarnah, L. Towards the LIVING Envelope: Biomimetics for Building Envelope Adaptation. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2012. [Google Scholar]
- Romano, R.; Aelenei, L.; Aelenei, D.; Mazzucchelli, E.S. What Is an Adaptive Façade? Analysis of Recent Terms and Definitions from an International Perspective. J. Facade Des. Eng. 2018, 6, 65–76. [Google Scholar] [CrossRef]
- Ashraf, N.; Abdin, A.R. Biomimetic Design Synthesis and Digital Optimization of Building Shading Skin: A Novel Conceptual Framework for Enhanced Energy Efficiency. Energy Build. 2024, 323, 114824. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Mohammadi, M.; Schröder, T.; Guerra-Santin, O. Integrating Interactive Kinetic Façade Design with Colored Glass to Improve Daylight Performance Based on Occupants’ Position. J. Build. Eng. 2020, 31, 101404. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Heidari, S. General Morphological Analysis of Orosi Windows and Morpho Butterfly Wing’s Principles for Improving Occupant’s Daylight Performance through Interactive Kinetic Façade. J. Build. Eng. 2022, 59, 105027. [Google Scholar] [CrossRef]
- Imani, M.; Donn, M.; Balador, Z. Bio-Inspired Materials: Contribution of Biology to Energy Efficiency of Buildings. In Handbook of Ecomaterials; Martínez, L.M.T., Kharissova, O.V., Kharisov, B.I., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 2213–2236. ISBN 978-3-319-68255-6. [Google Scholar]
- Lurie-Luke, E. Product and Technology Innovation: What Can Biomimicry Inspire? Biotechnol. Adv. 2014, 32, 1494–1505. [Google Scholar] [CrossRef]
- Kuipers, N. FROM STATIC TO KINETIC—The Potential of Kinetic Façades in Care-Hotels.AE-Intecture-Stud. 2015. Available online: https://www.academia.edu/24258545/FROM_STATIC_TO_KINETIC_-_The_potential_of_kinetic_fa%C3%A7ades_in_care-hotels (accessed on 20 January 2025).
- Lienhard, J.; Schleicher, S.; Poppinga, S.; Masselter, T.; Milwich, M.; Speck, T.; Knippers, J. Flectofin: A Hingeless Flapping Mechanism Inspired by Nature. Bioinspir. Biomim. 2011, 6, 45001. [Google Scholar] [CrossRef]
- Poppinga, S.; Masselter, T.; Lienhard, J.; Schleicher, S.; Knippers, J.; Speck, T. Plant Movements As Concept Generators For Deployable Systems In Architecture. WIT Trans. Ecol. Environ. 2010, 138, 403–409. [Google Scholar] [CrossRef]
- Krieg, O.D. HygroSkin—Meteorosensitive Pavilion. In Advancing Wood Architecture; Routledge: Oxfordshire, UK, 2016; ISBN 978-1-315-67882-5. [Google Scholar]
- Menges, A. Biomimetic Design Processes in Architecture: Morphogenetic and Evolutionary Computational Design. Bioinspir. Biomim. 2012, 7, 15003. [Google Scholar] [CrossRef]
- Knippers, J.; Gabler, M.; La Magna, R.; Waimer, F.; Menges, A.; Reichert, S.; Schwinn, T. From Nature to Fabrication: Biomimetic Design Principles for the Production of Complex Spatial Structures. In Proceedings of the Advances in Architectural Geometry 2012; Hesselgren, L., Sharma, S., Wallner, J., Baldassini, N., Bompas, P., Raynaud, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 107–122. [Google Scholar]
- Menges, A. Integrative Design Computation: Integrating Material Behaviour and Robotic Manufacturing Processes in Computational Design for Performative Wood Constructions. In Integration Through Computation—Proceedings of the 31st Annual Conference of the Association for Computer Aided Design in Architecture; ACADIA: Fargo, ND, USA, 2011; pp. 72–81. [Google Scholar] [CrossRef]
- Kim, H.; Clayton, M.J. A Multi-Objective Optimization Approach for Climate-Adaptive Building Envelope Design Using Parametric Behavior Maps. Build. Environ. 2020, 185, 107292. [Google Scholar] [CrossRef]
- Soliman, M.E.; Bo, S. An Innovative Multifunctional Biomimetic Adaptive Building Envelope Based on a Novel Integrated Methodology of Merging Biological Mechanisms. J. Build. Eng. 2023, 76, 106995. [Google Scholar] [CrossRef]
- Kuru, A.; Oldfield, P.; Bonser, S.; Fiorito, F. Biomimetic Adaptive Building Skins: Energy and Environmental Regulation in Buildings. Energy Build. 2019, 205, 109544. [Google Scholar] [CrossRef]
- Bui, D.K. Improving Building Energy Efficiency: Biomimetic Adaptive Façade and Computational Data-Driven Approach. Ph.D. Thesis, The University of Melbourne, Parkville, Australia, 2020. [Google Scholar]
- Goharian, A.; Mahdavinejad, M.; Ghazazani, S.; Hosseini, S.M.; Zamani, Z.; Yavari, H.; Ghafarpoor, F.; Shoghi, F. Designing Adaptability Strategy to a Novel Kinetic Adaptive Façade (NKAF); Toward a Pioneering Method in Dynamic-Objects Daylight Simulation (Post-Processing). J. Daylighting 2025, 12, 69–90. [Google Scholar] [CrossRef]
- Le, D.M.; Park, D.Y.; Baek, J.; Karunyasopon, P.; Chang, S. Multi-Criteria Decision Making for Adaptive Façade Optimal Design in Varied Climates: Energy, Daylight, Occupants’ Comfort, and Outdoor View Analysis. Build. Environ. 2022, 223, 109479. [Google Scholar] [CrossRef]
- Wang, Y.; Han, Y.; Wu, Y.; Korkina, E.; Zhou, Z.; Gagarin, V. An Occupant-Centric Adaptive Façade Based on Real-Time and Contactless Glare and Thermal Discomfort Estimation Using Deep Learning Algorithm. Build. Environ. 2022, 214, 108907. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Mohammadi, M.; Schröder, T.; Guerra-Santin, O. Bio-Inspired Interactive Kinetic Façade: Using Dynamic Transitory-Sensitive Area to Improve Multiple Occupants’ Visual Comfort. Front. Archit. Res. 2021, 10, 821–837. [Google Scholar] [CrossRef]
- Sommese, F.; Hosseini, S.M.; Badarnah, L.; Capozzi, F.; Giordano, S.; Ambrogi, V.; Ausiello, G. Light-Responsive Kinetic Façade System Inspired by the Gazania Flower: A Biomimetic Approach in Parametric Design for Daylighting. Build. Environ. 2024, 247, 111052. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Heiranipour, M.; Wang, J.; Hinkle, L.E.; Triantafyllidis, G.; Attia, S. Enhancing Visual Comfort and Energy Efficiency in Office Lighting Using Parametric-Generative Design Approach for Interactive Kinetic Louvers. J. Daylighting 2024, 11, 69–96. [Google Scholar] [CrossRef]
- Markin, V.S.; Volkov, A.G.; Jovanov, E. Active Movements in Plants: Mechanism of Trap Closure by Dionaea Muscipula Ellis. Plant Signal Behav. 2008, 3, 778–783. [Google Scholar] [CrossRef]
- Lin, Y.; Zhang, C.; Tang, W.; Jiao, Z.; Wang, J.; Wang, W.; Zhong, Y.; Zhu, P.; Hu, Y.; Yang, H.; et al. A Bioinspired Stress-Response Strategy for High-Speed Soft Grippers. Adv. Sci. 2021, 8, 2102539. [Google Scholar] [CrossRef]
- Guo, Q.; Dai, E.; Han, X.; Xie, S.; Chao, E.; Chen, Z. Fast Nastic Motion of Plants and Bioinspired Structures. J. R. Soc. Interface 2015, 12, 20150598. [Google Scholar] [CrossRef] [PubMed]
- Zeng, X.; Wang, Y.; Morishima, K. Asymmetric-Bifurcation Snapping, All-or-None Motion of Venus Flytrap. Sci. Rep. 2025, 15, 4805. [Google Scholar] [CrossRef] [PubMed]
- Burri, J.T.; Saikia, E.; Läubli, N.F.; Vogler, H.; Wittel, F.K.; Rüggeberg, M.; Herrmann, H.J.; Burgert, I.; Nelson, B.J.; Grossniklaus, U. A Single Touch Can Provide Sufficient Mechanical Stimulation to Trigger Venus Flytrap Closure. PLoS Biol. 2020, 18, e3000740. [Google Scholar] [CrossRef] [PubMed]
- Yunitsyna, A.; Sulaj, E. Daylight Optimization of the South-Faced Architecture Classrooms Using Biomimicry-Based Kinetic Facade Shading System. J. Daylighting 2025, 12, 1–20. [Google Scholar] [CrossRef]
- Bemm, F.; Becker, D.; Larisch, C.; Kreuzer, I.; Escalante-Perez, M.; Schulze, W.X.; Ankenbrand, M.; de Weyer, A.-L.; Krol, E.; Al-Rasheid, K.A.; et al. Venus Flytrap Carnivorous Lifestyle Builds on Herbivore Defense Strategies. Genome Res. 2016, 26, 812–825. [Google Scholar] [CrossRef]
- Li, J.; Tian, A.; Sun, Y.; Feng, B.; Wang, H.; Zhang, X. The Development of a Venus Flytrap Inspired Soft Robot Driven by IPMC. J. Bionic. Eng. 2023, 20, 406–415. [Google Scholar] [CrossRef]
- Volkov, A.G.; Harris, S.L.; Vilfranc, C.L.; Murphy, V.A.; Wooten, J.D.; Paulicin, H.; Volkova, M.I.; Markin, V.S. Venus Flytrap Biomechanics: Forces in the Dionaea Muscipula Trap. J. Plant Physiol. 2013, 170, 25–32. [Google Scholar] [CrossRef]
- Volkov, A.G.; Adesina, T.; Markin, V.S.; Jovanov, E. Kinetics and Mechanism of Dionaea Muscipula Trap Closing. Plant Physiol. 2008, 146, 694–702. [Google Scholar] [CrossRef]
- Wang, B.; Hou, Y.; Zhong, S.; Zhu, J.; Guan, C. Biomimetic Venus Flytrap Structures Using Smart Composites: A Review. Materials 2023, 16, 6702. [Google Scholar] [CrossRef]
- Durak, G.M.; Speck, T.; Poppinga, S. Shapeshifting in the Venus Flytrap (Dionaea Muscipula): Morphological and Biomechanical Adaptations and the Potential Costs of a Failed Hunting Cycle. Front. Plant Sci. 2022, 13, 970320. [Google Scholar] [CrossRef]
- Reinhart, C. Daylight Performance Predictions. In Building Performance Simulation for Design and Operation; Routledge: Oxfordshire, UK, 2019; ISBN 978-0-429-40229-6. [Google Scholar]
- Reinhart, C.F.; Walkenhorst, O. Validation of Dynamic RADIANCE-Based Daylight Simulations for a Test Office with External Blinds. Energy Build. 2001, 33, 683–697. [Google Scholar] [CrossRef]
- Brembilla, E.; Mardaljevic, J. Climate-Based Daylight Modelling for Compliance Verification: Benchmarking Multiple State-of-the-Art Methods. Build. Environ. 2019, 158, 151–164. [Google Scholar] [CrossRef]
- Nabil, A.; Mardaljevic, J. Useful Daylight Illuminance: A New Paradigm for Assessing Daylight in Buildings. Light. Res. Technol. 2005, 37, 41–57. [Google Scholar] [CrossRef]
- American, A.N. ANSI/IES LM-83-23 Approved Method: IES Spatial Daylight Autonomy (SDA) and Annual Sunlight Exposure (ASE); Illuminating Engineering Society: New York, NY, USA, 2022. [Google Scholar]
- Wienold, J.; Christoffersen, J. Evaluation Methods and Development of a New Glare Prediction Model for Daylight Environments with the Use of CCD Cameras. Energy Build. 2006, 38, 743–757. [Google Scholar] [CrossRef]
- Reinhart, C.F.; Wienold, J. The Daylighting Dashboard—A Simulation-Based Design Analysis for Daylit Spaces. Build. Environ. 2011, 46, 386–396. [Google Scholar] [CrossRef]
- Nouri, A.; Frisch, J.; van Treeck, C. Statistical Methodologies for Verification of Building Energy Performance Simulation. IBPSA 2021, 17, 1719–1726. [Google Scholar]
- Hosseini, S.M.; Mohammadi, M.; Guerra-Santin, O. Interactive Kinetic Façade: Improving Visual Comfort Based on Dynamic Daylight and Occupant’s Positions by 2D and 3D Shape Changes. Build. Environ. 2019, 165, 106396. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kinetic Strategy | Climate | Methodology | Software | Movement Mechanism | Form/Grid | Material | Function | User Detection and Estimation | Influential Parameters | Environmental Trigger | Control Logic |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Light-responsive kinetic façade (2024) | Cfb | PD, PS, BPS, B | LB, RH, GH, R | S, 3D | HS, CF/R | SM | DP, GP, RTDC, SSD | SU, MP | Identification of focal and peripheral regions on the façade | S | DC, IU |
| Parametric façade design (2024) | _ | GAs, SM | GH, GP | S, 3D | T, S, H | _ | DP, VOB | SU | geometric patterns and the position of the supports in façade design | T | IU |
| Real-time daylight control (2024) | Bsh | PD, PS, BPS, B | LB, RH, GH, R | PGC, PIR | CP, HPS | _ | DP, DC, SSD, GP | MU, P | Kinetic façade draws inspiration from the nano-scale structure and kinetic behavior of the Morpho butterfly wing | S | IU |
| Parametric-generative kinetic façade (2024) | Bsh | PS, B, PD, DPE | D, LB, HB | R, PI, CS | R, TSA | OM | EE, MO, DP, GP | MU | Interactive kinetic louver coupled with electric lighting | S | IU, GEL, IL, DC, IE |
| Variable building skin with solar-concentrating technology (2024) | Cwa | PM, PS, BPS, MOO | LB, RH, GH, R | R, 3D | CF/H | VT | DP, GP, RTDC, SSD, EP | SU, MP | Integrating hexagonal module with a Fresnel lens to concentrate solar rays, sun tracking system | S | DC, IE |
| Multifunctional adaptive building envelope (2023) | BWH | B, BPS | DB | SS, R, Fo, 3D | CF/H | PG | T, RTDC, EE | S | Foldable surfaces with hexagonal shapes, multiple layers, self-shading features, and symmetrical triangular fins | T | DC, IE |
| Flexible adaptive shading façade (2023) | Dwa | B, PD, BPS, FEA, F | C, 3D | CF/H | SM | DP, RTD | S | Real-time façade shape change, flexural hexagonal shapes | S | CC, IE | |
| Interactive kinetic façade (2022) | BWh | B, GMA, PM, PS, BPS, MOO | LB, RH, GH, R | R, Sc, S, 3D | CF, HS/H | CG | DP, GP, SSD, RTDC | SU, MP | Geometrical changes (different depths and scales), composition of colored glass, periodic changes based on sun-timing positions and user positions | S | DC, IU |
| Occupant-centric adaptive façade design (2022) | Dwa | S, PM, BPS, ML, MOO | LB, RH, GH, R, EP | R, 3D | CF, HS/R | VT | DP, T, GP, SSD, RTDC, EE | SU, P, OP | Posture definition, adjusting shading unit, sun angle, and temperature | S | CC, IU |
| Multiobjective optimization (2022) | Aw, Cfa, Cfa, Dfb, BSk | PS, MOO, SA | RH, GH, CS, R, EP | Ro, 2D | RB | VT, OF | DP, T, GP, SSD, RTDC, EE, VCE | S | Window to wall ratio, glazing, blind, fully opened or fully closed without intermediate change | S | CC, IE |
| Advanced control of indoor and outdoor Venetian blinds (2022) | Csa | PD, PS, MOO | LB, RH, GH, R | R, 3D | VB/R | VT | DP, GP, SSD, VCE | MU, MP | Integration of interior light shelves and exterior venetian blind, independently adjustable tilt angles of multiple sections of thw façade | S | DC, IU |
| Form-finding of kinetic façades (2022) | Csa | PD, PS, MOO | LB, RH, GH, R | R, S, 3D | PS/R | C | DP | S | Shape changes, tessellated form | S | CC, IE |
| Bio-inspired kinetic façade (2021) | BWh | B, PM, PS, BPS | D, RH, GH, R | R, S, 3D | CF, HS/R | VT | DP, GP, SSD, RTDC | MU, MP | Dynamic transitory-sensitive area, symmetrical element, hierarchical arrangement, immediate reconfiguration | S | DC, IU |
| Biomimetic kinetic shading façade (2021) | BWh | B, PM, PS, BPS | D, RH, GH, R | C, 3D | CF/R | _ | DP, GP, SSD, RTDC | SU, OP | Multilayered skin, kinetic curvature movement, intersected element | S | IE |
| Adaptive shading control (2021) | Af, BSh, Cfb, BWh, Csa, Dfb | PM, PS, BPS | LB, RH, GH, R, EP | R, 3D | VB/R | VT | DP, T, GP, SSD, RTDC, EE | S | Climate zone, window-to-wall ratio, building orientation, shading control strategy and its activation threshold, rotation range from 0° to 90° | T | CC, IE |
| Bio-curvilinear shading device (2024) | BWh, Csa | CAD, B | IDA ICE | _ | SS | OM | EE | S | Sensitivity analysis for optimum depth and interval values | T | IE |
| Vertical fin shading system (2024) | Dfb | PD, PS, BPS | RH, GH, LB, | R, 3D | SS | _ | EE, DGP, DP, | MU, MP | Vertical fins rotate (closed and open) according to the illuminance level at the work plane | T | IE, IU |
| Design of a responsive façade for occupant visual comfort in different latitudes (2024) | Bsh, Bwh, Dfb | PD, PS, BPS | RH, GH, LB, | Sc, 3D | H | _ | vc | MU, MP | Uses inclined walls to enhance visual comfort and adequate natural light | S, T | IE, IU |
| Kinetic module using bimetal (2024) | Cfa | PS, CRM | _ | Sc, 3D printed | CF, T | SM | EE | MU | Different openings for the biomodules; rotation of up to 90° allows ventilation | T | IE |
| Method | Ambient Bounces (-ab) | Ambient Divisions (-ad) | Ambient Super Samples (-as) | Ambient Accuracy (-aa) | Ambient Resolution (-ar) | Limit Weight (-lw) |
|---|---|---|---|---|---|---|
| Daylight Coefficient | 6 | 4096 | 512 | 0.15 | 512 | 0.002 |
| Performance Criteria | |||
|---|---|---|---|
| Parameters | Name | Unit | Range |
| Daylight Related Parameters | Useful daylight Illuminance | Lux | [100−3000] |
| Spatial daylight autonomy | Percentage | [0−100] | |
| Annual Sun Exposure | Percentage | [0−100] | |
| Visual Comfort | Annual Glare | Percentage | [0 − 100] |
| Model Driving Parameters | Shading Form change (TSA) | m | [0.5−1−1.5−2−2.5−3−3.5−4−4.5−5−5.5−6] |
| Shading Form Angle(domain_A) | Degrees | 20, 40, 60 | |
| Shading Form Angle(domain_B) | Degrees | If domain_A = 20(0, 7, 15) If domain_A = 40(0, 15, 30) If domain_A = 60(0, 25, 50) | |
| Model fixed Parameters | Grid Division | Integer | 12 |
| Glazing Ratio | Percentage | 90 | |
| Window Material | user−defined | Single−Low−E | |
| Task Area Height | m | 0.76 | |
| View Area Height | m | 1.20 | |
| Space Width | m | 4.2 | |
| Space Length | m | 7 | |
| Space High | m | 2.8 | |
| Shading device Reflectance | Percentage | 35 | |
| Int. Wall Reflectance | Percentage | 50 | |
| Int. Ceiling Reflectance | Percentage | 80 | |
| Int. Floor Reflectance | Percentage | 20 | |
| Ext. Ground Reflectance | Percentage | 20 | |
| Time Parameters | Month | Integer | 6−9−12 |
| Day | Integer | 21 | |
| Hour | Integer | 9−12−15 | |
| Climate Parameters | Weather File for analysis | user−defined | Hot Dry |
| WWR | sDA | ASE | UDI | sDG | |
|---|---|---|---|---|---|
| Average | 39.59 | 68.55 | 10.59 | 91.68 | 13.88 |
| Standard deviation | 1.53 | 3.47 | 2.36 | 0.30 | 1.98 |
| Lower band | 1.35409 | 3.06 | 2.08 | 0.27 | 1.75 |
| Upper band | 1.772382 | 4.01 | 2.72 | 0.35 | 2.29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farmani, F.; Hosseini, S.M.; Assadi, M.K.; Hassanzadeh, S. Computational Evaluation of a Biomimetic Kinetic Façade Inspired by the Venus Flytrap for Daylight and Glare Performance. Buildings 2025, 15, 1853. https://doi.org/10.3390/buildings15111853
Farmani F, Hosseini SM, Assadi MK, Hassanzadeh S. Computational Evaluation of a Biomimetic Kinetic Façade Inspired by the Venus Flytrap for Daylight and Glare Performance. Buildings. 2025; 15(11):1853. https://doi.org/10.3390/buildings15111853
Chicago/Turabian StyleFarmani, Fataneh, Seyed Morteza Hosseini, Morteza Khalaji Assadi, and Soroush Hassanzadeh. 2025. "Computational Evaluation of a Biomimetic Kinetic Façade Inspired by the Venus Flytrap for Daylight and Glare Performance" Buildings 15, no. 11: 1853. https://doi.org/10.3390/buildings15111853
APA StyleFarmani, F., Hosseini, S. M., Assadi, M. K., & Hassanzadeh, S. (2025). Computational Evaluation of a Biomimetic Kinetic Façade Inspired by the Venus Flytrap for Daylight and Glare Performance. Buildings, 15(11), 1853. https://doi.org/10.3390/buildings15111853