
Research on Rock-Breaking Characteristics of Cutters and Matching of Cutter Spacing and Penetration for Tunnel Boring Machine


Abstract
1. Introduction
2. Experimental Apparatus and Procedures
2.1. Experimental System
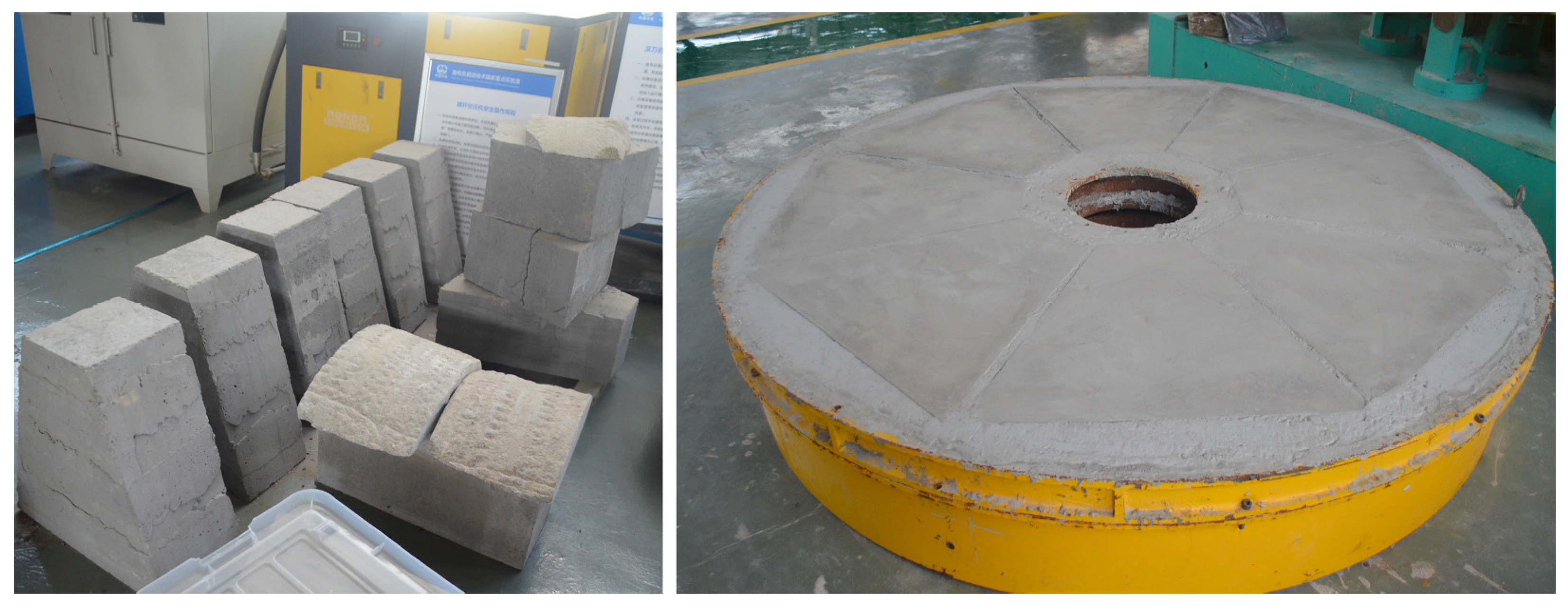
2.2. Sample Preparation
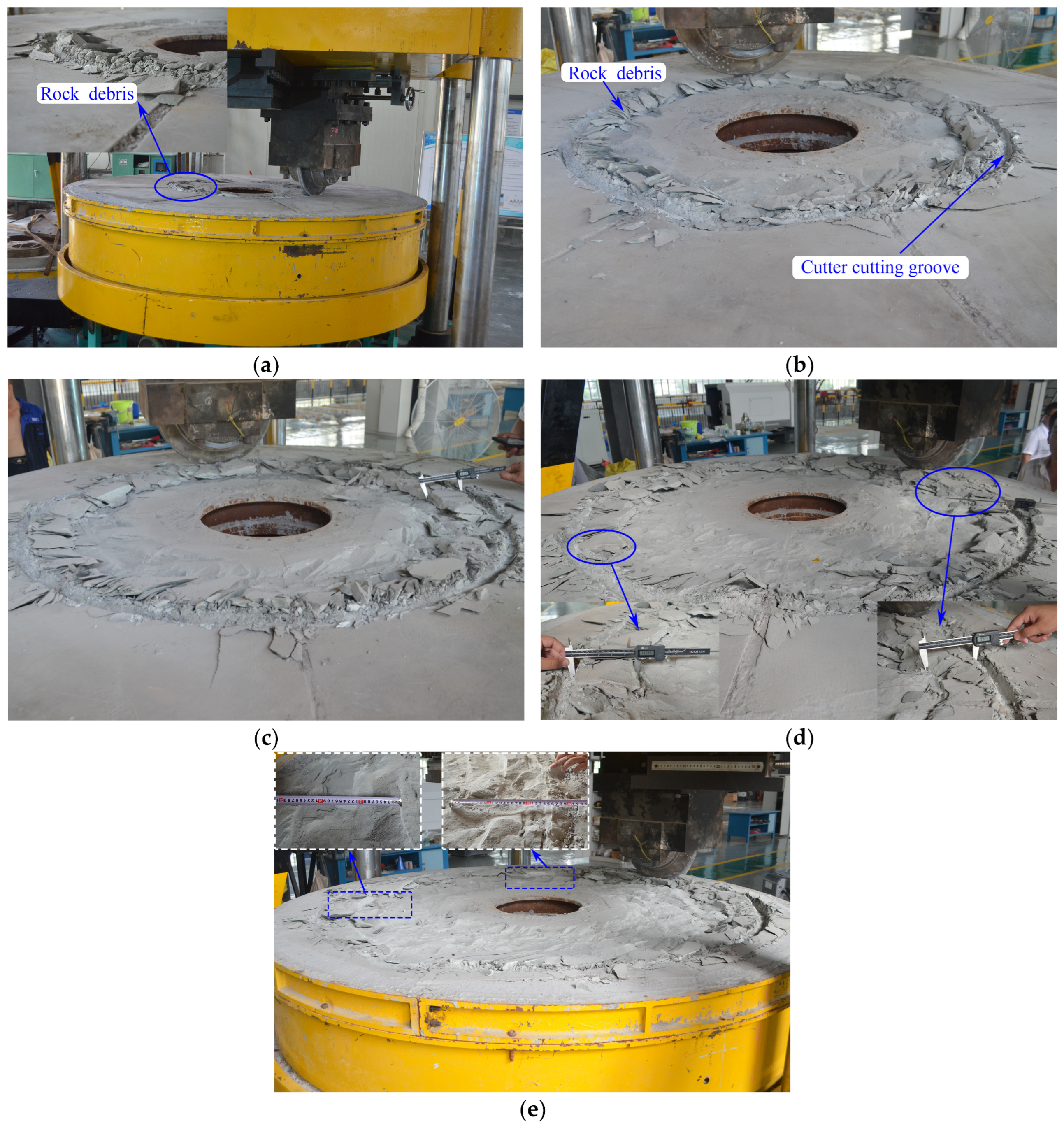
2.3. Experimental Process
- (1)
- Firstly, the installation radius of the rolling cutter was 0.45 m, and the cutterhead rotated four circles.
- (2)
- Secondly, the cutter was moved outward by 75 mm (R = 0.525 m), and the cutterhead rotated four circles.
- (3)
- Thirdly, the cutter was moved outward by 90 mm (R = 0.615 m), and the cutterhead rotated four circles.
- (4)
- Fourthly, the cutter was moved outward by 110 mm (R = 0.725 m), and the cutterhead rotated four circles.
- (5)
- Lastly, the cutter was moved outward by 130 mm (R = 0.855 m), and the cutterhead rotated four circles.
3. Experimental Results
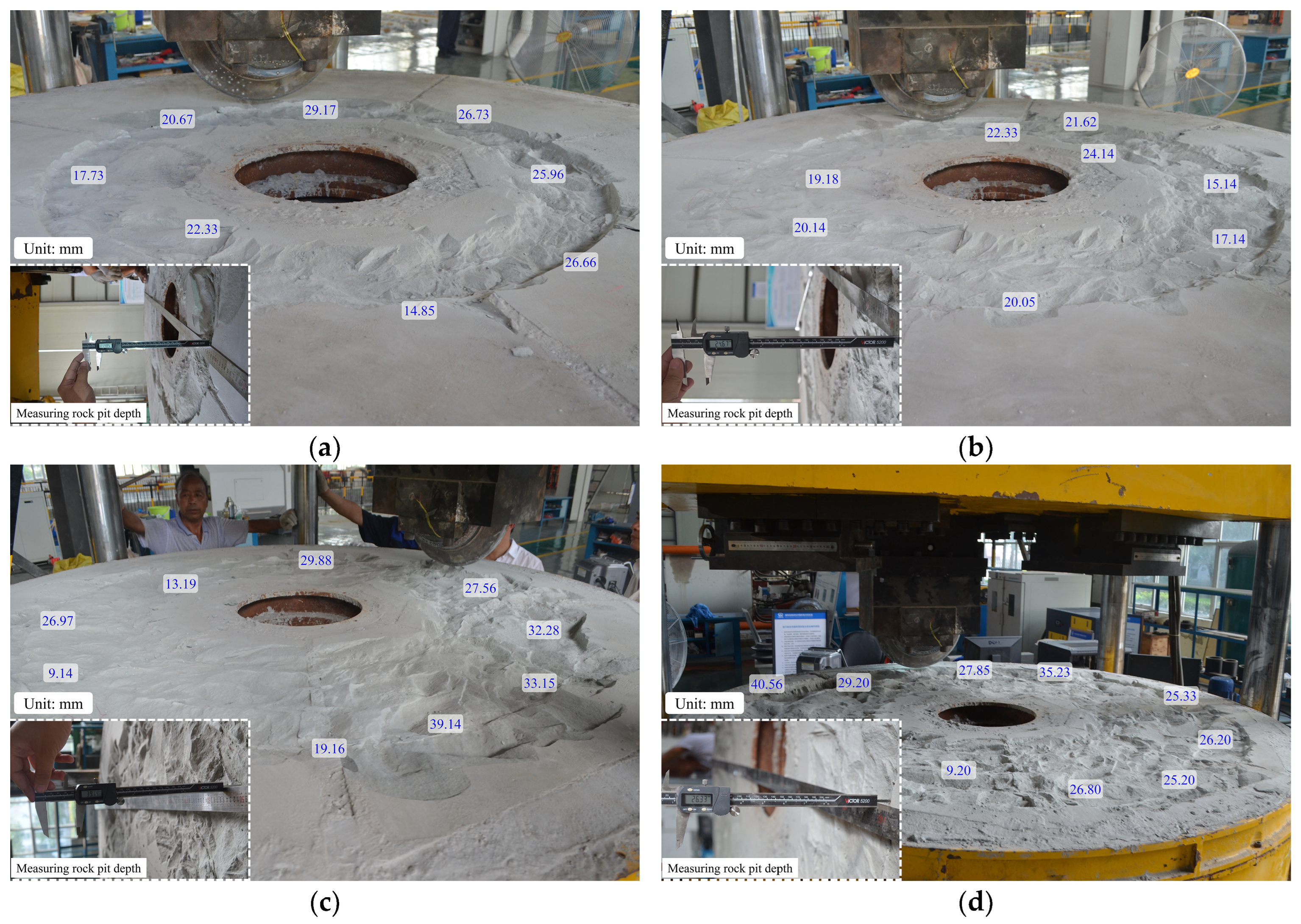
3.1. Rock Debris Shape Analysis
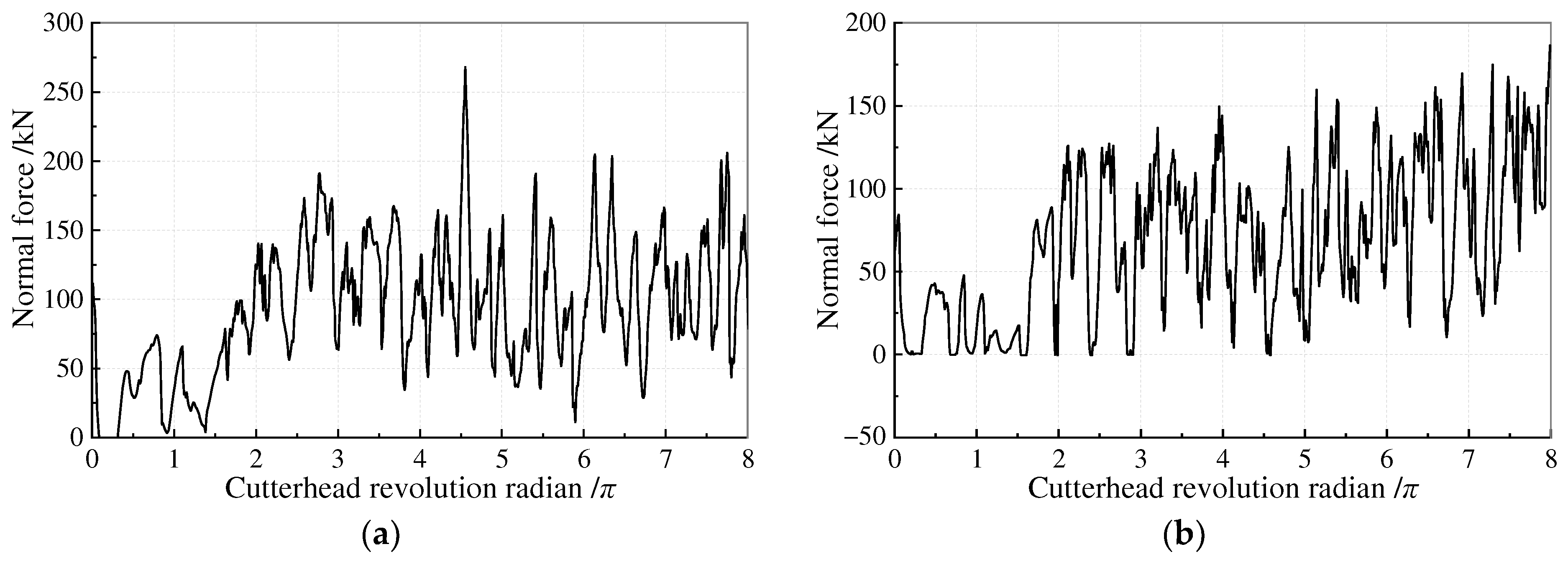
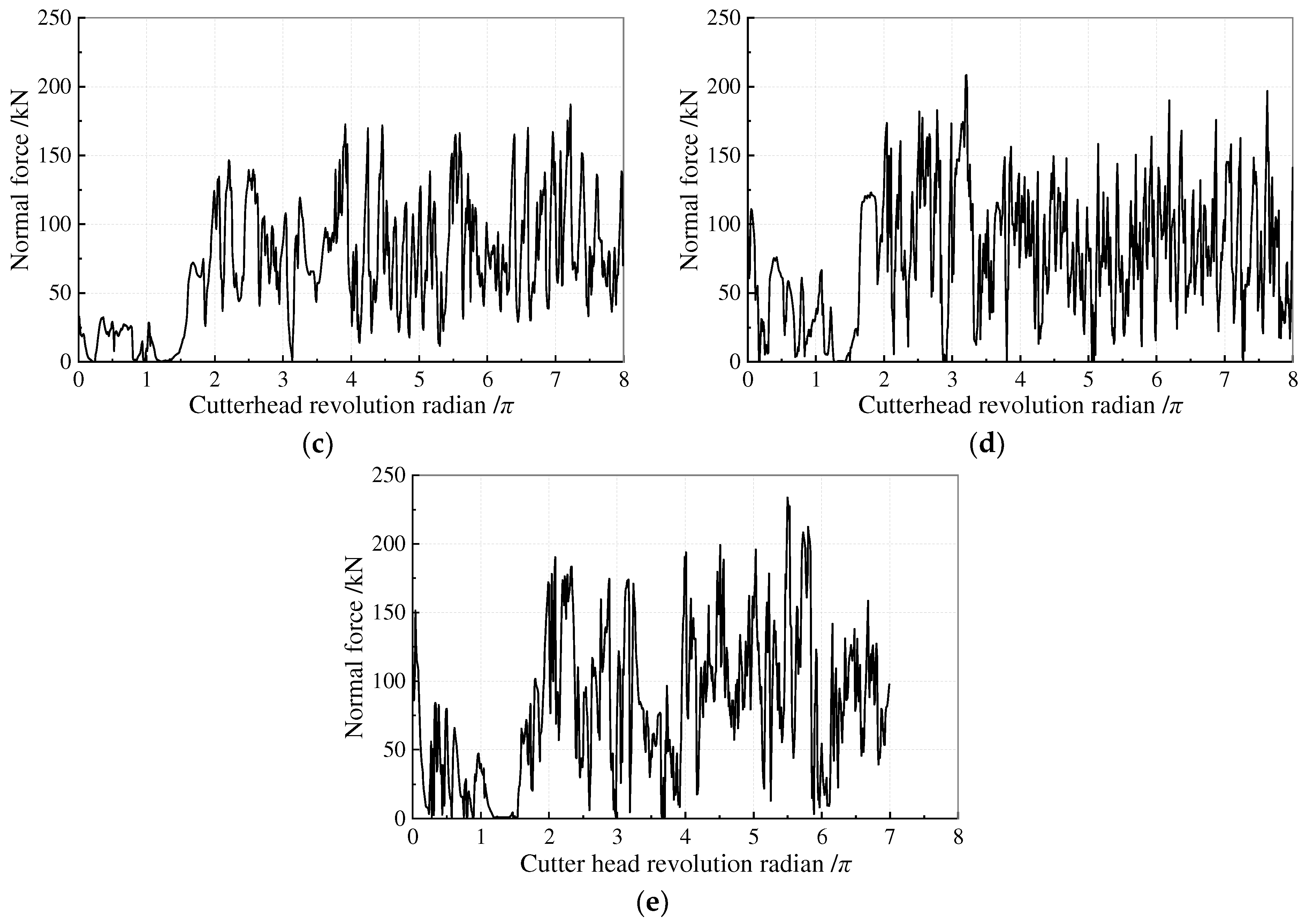
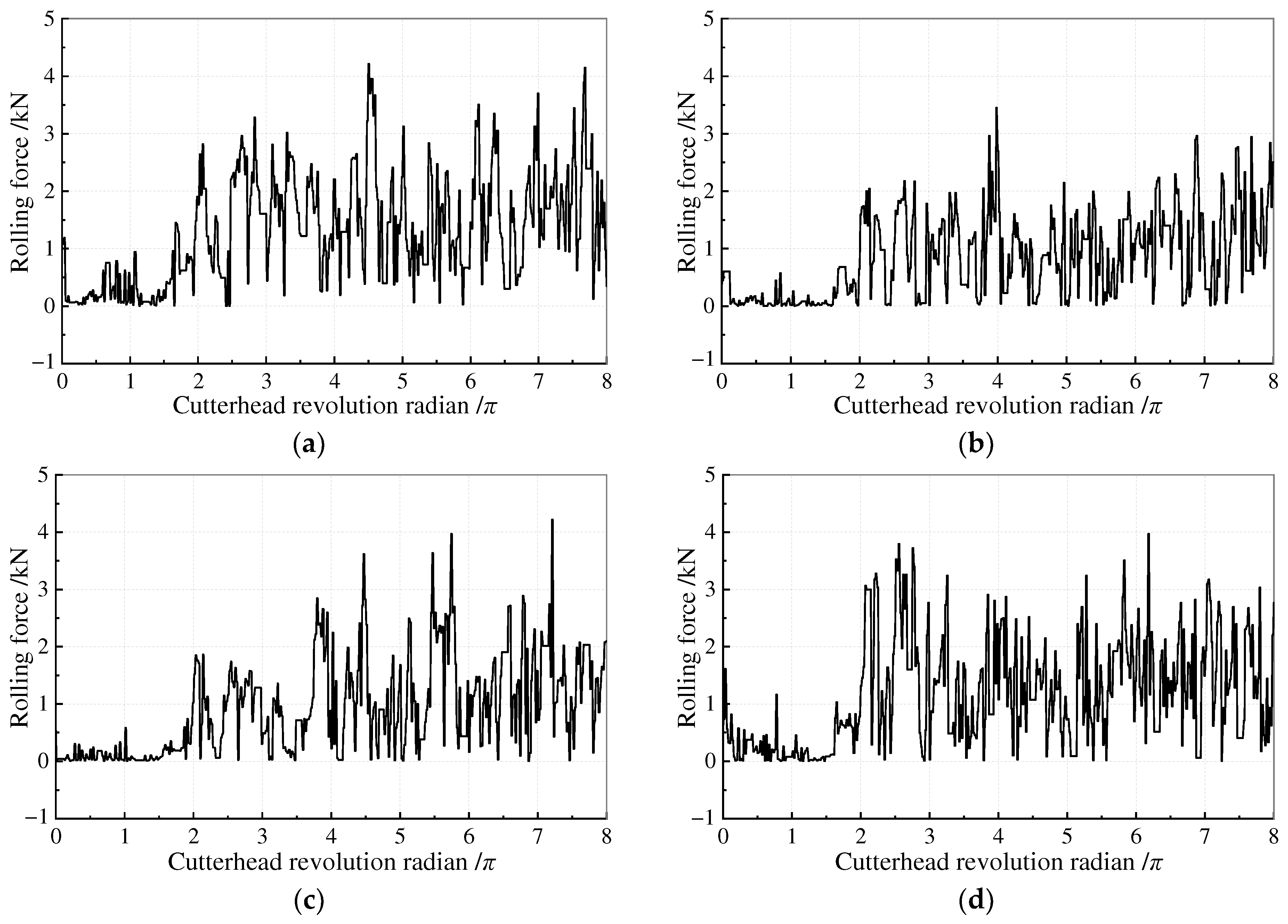
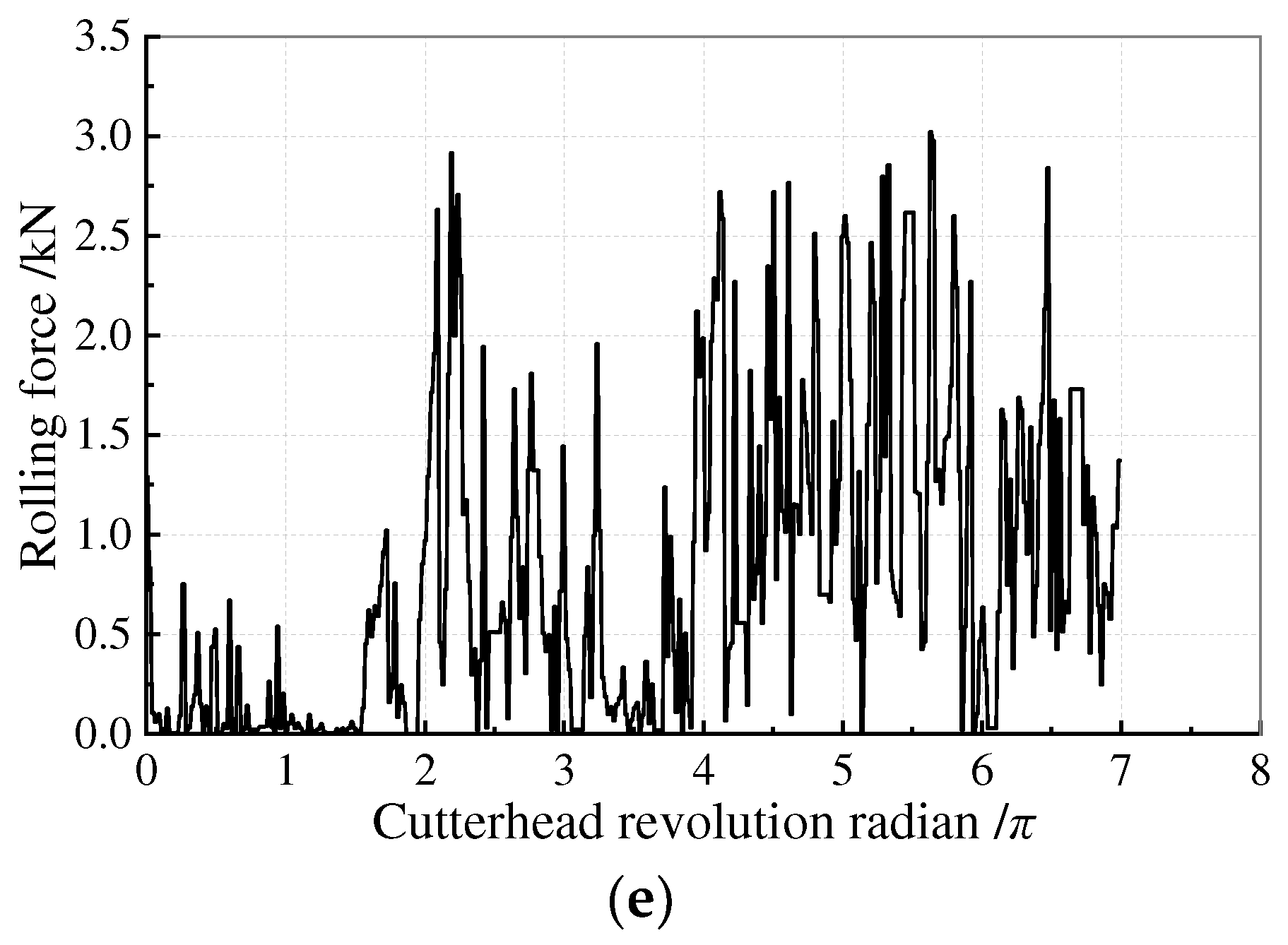
3.2. Rock-Breaking Characteristics of the Cutter
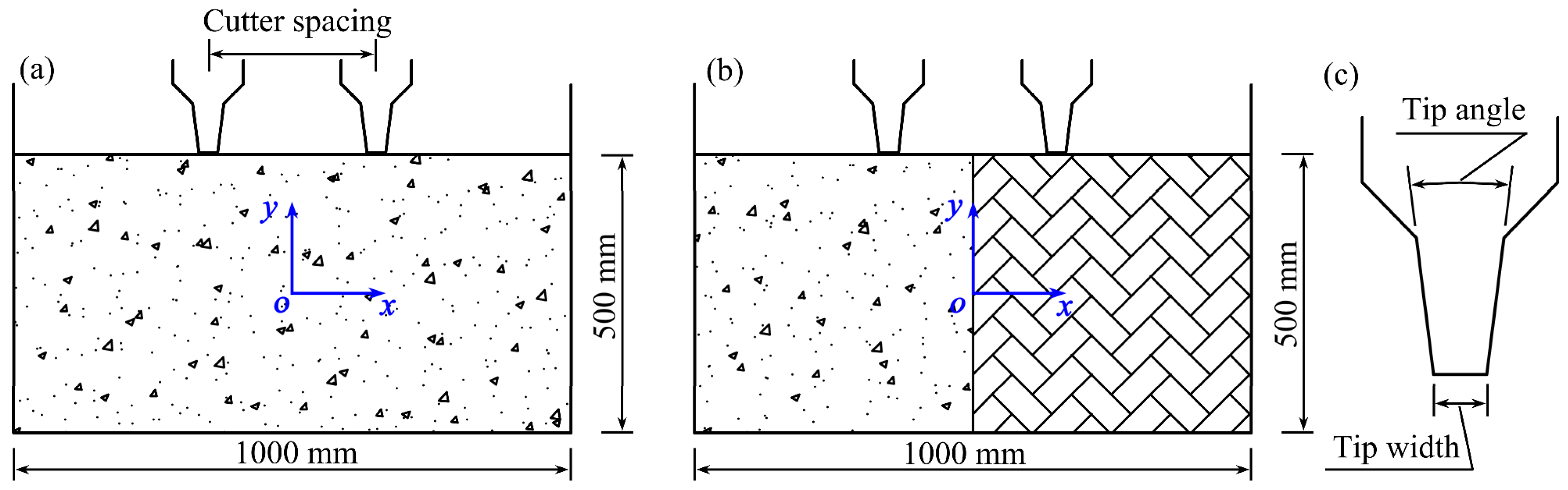
4. Numerical Model of Cutter Breaking Rock
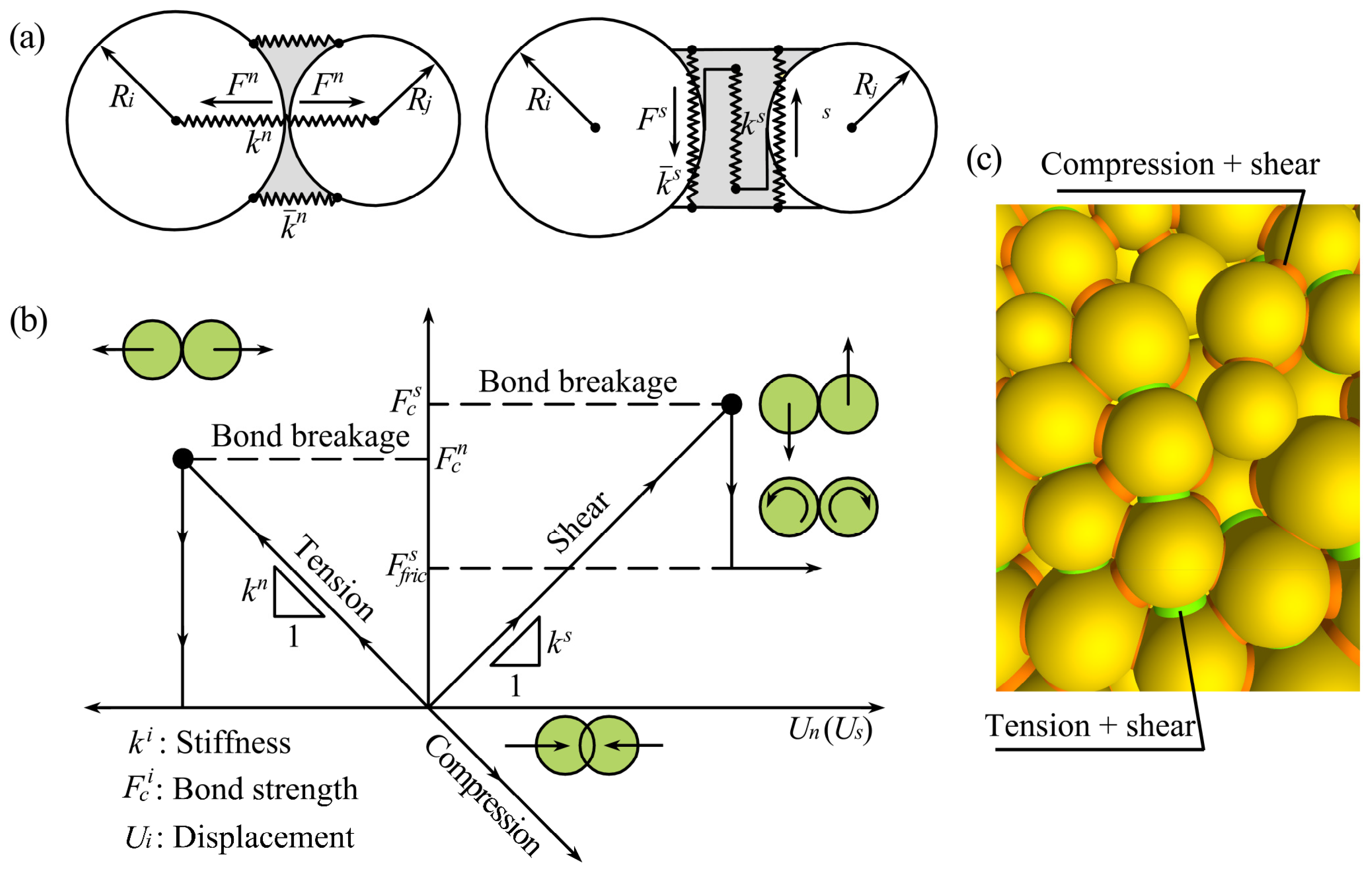
4.1. Particle Flow Model
4.2. Surrounding Rock Parameters
4.3. Cutter Parameters
5. Numerical Results
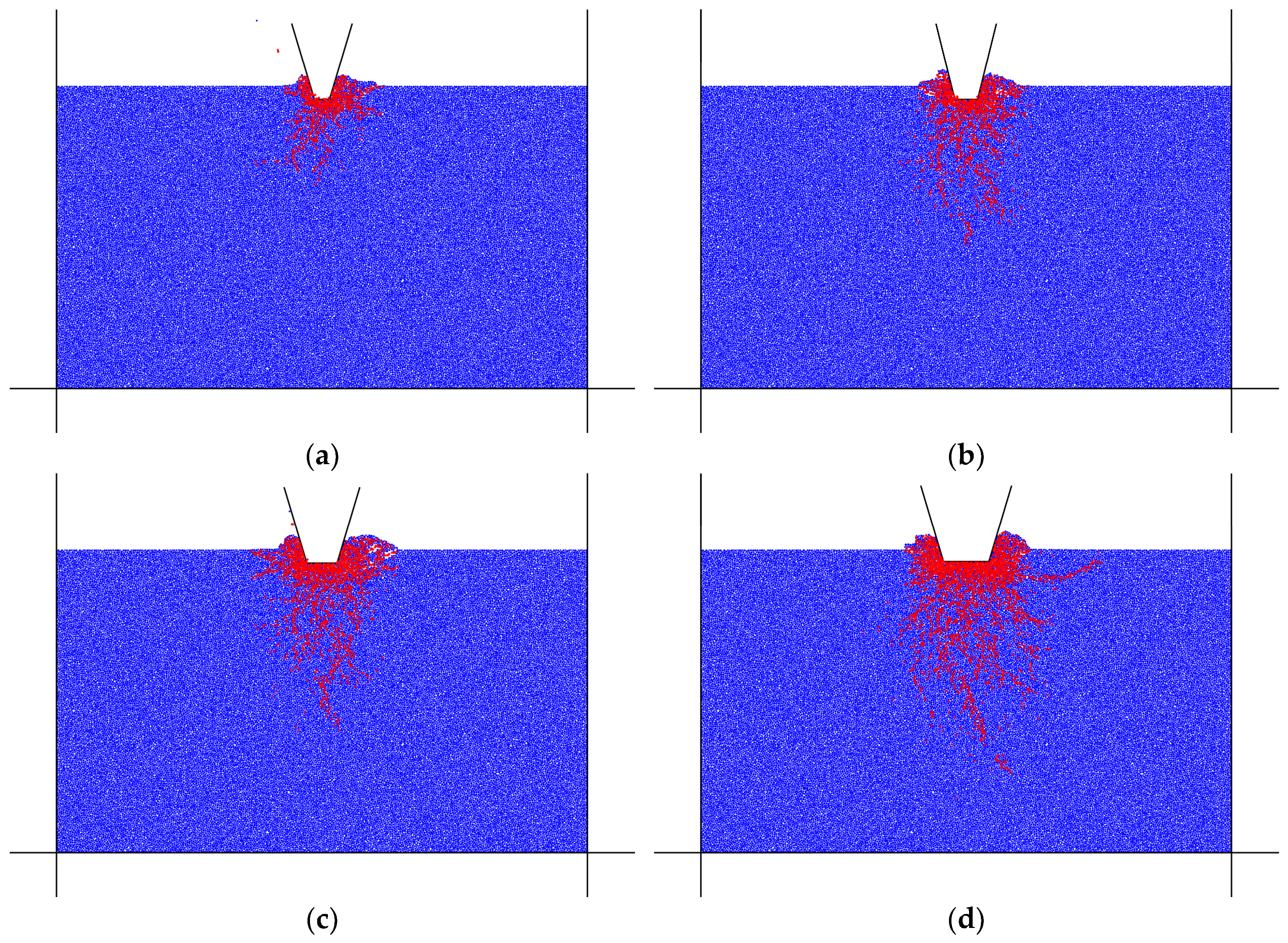
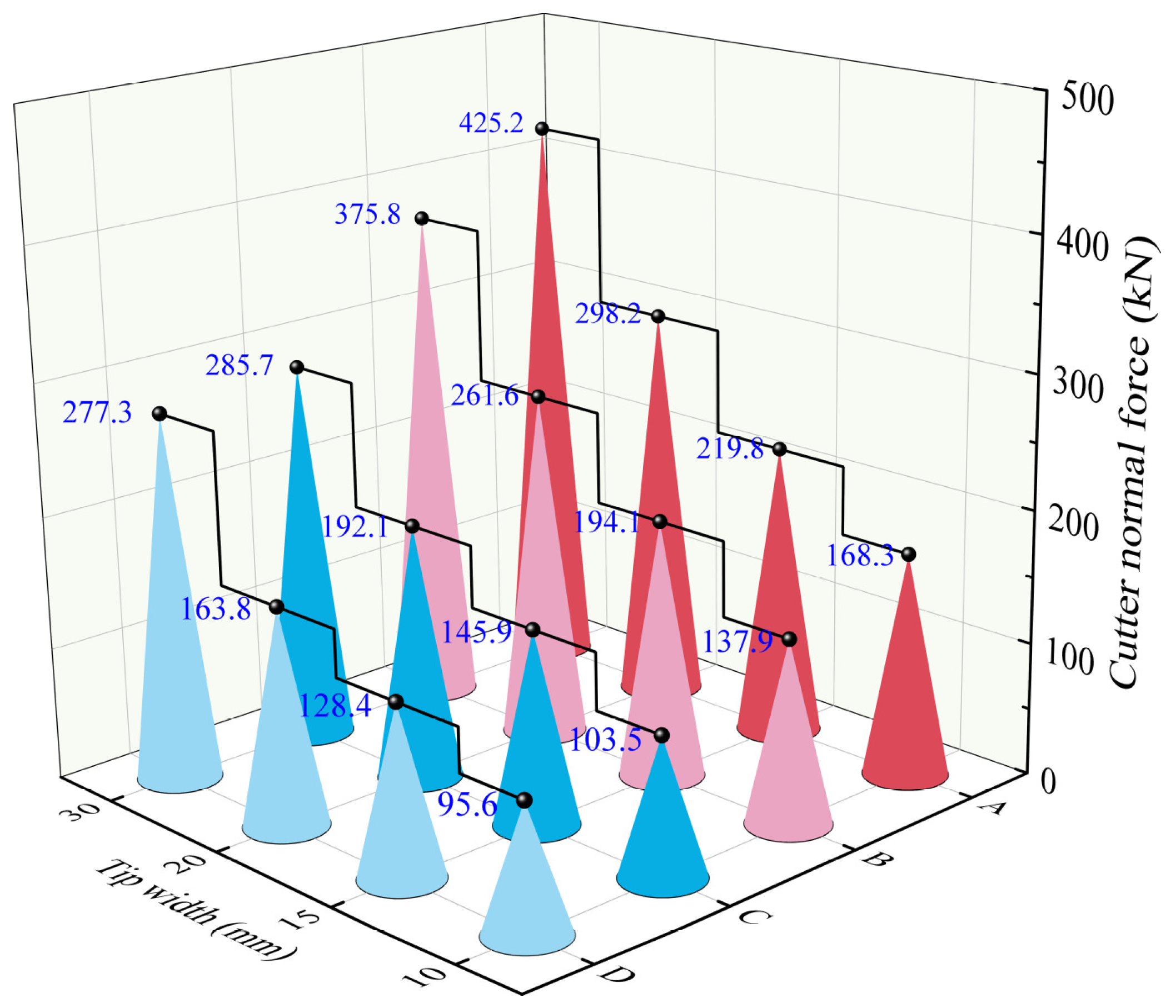
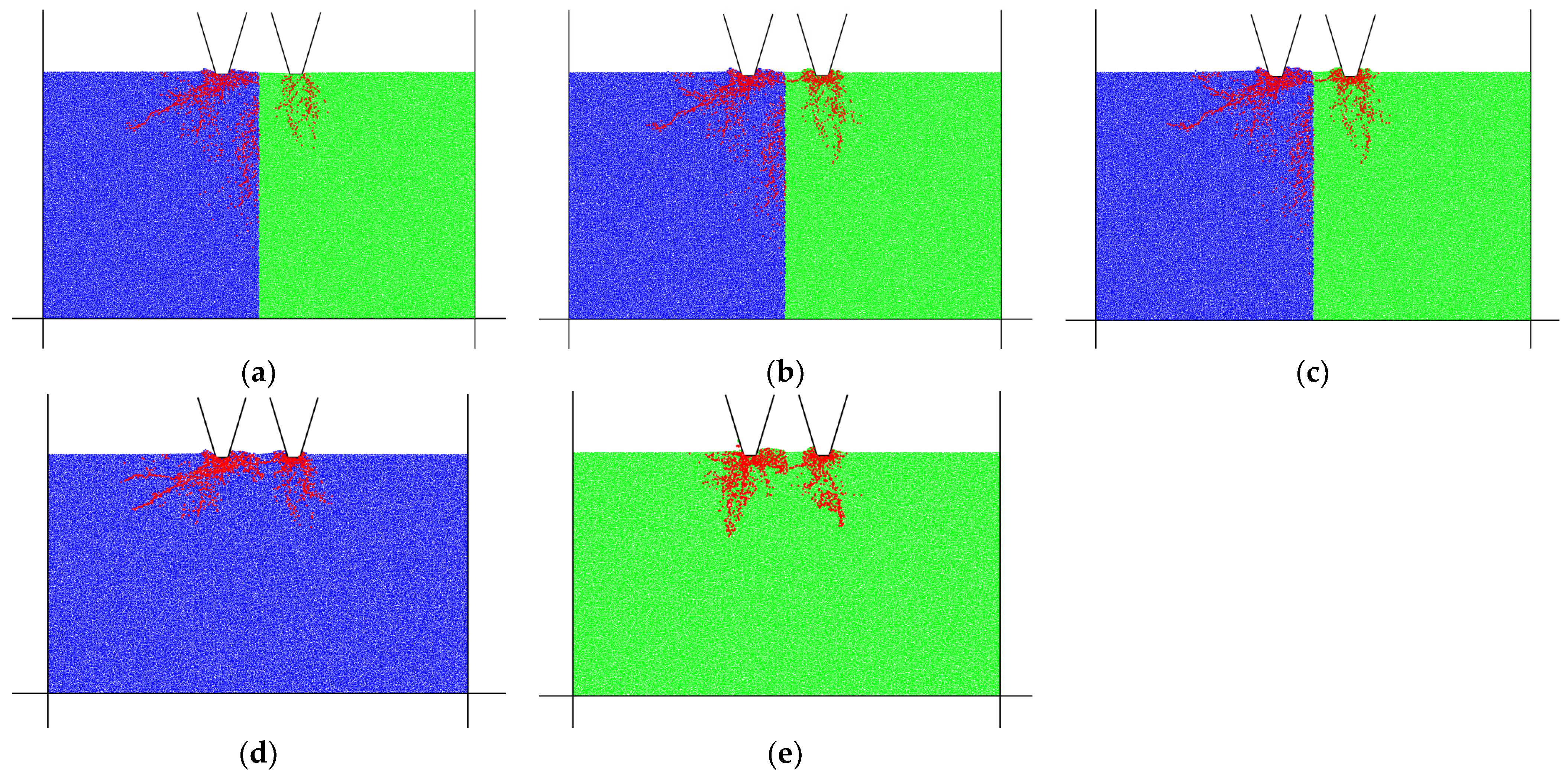
5.1. Rock-Breaking Characteristics of Composite Strata
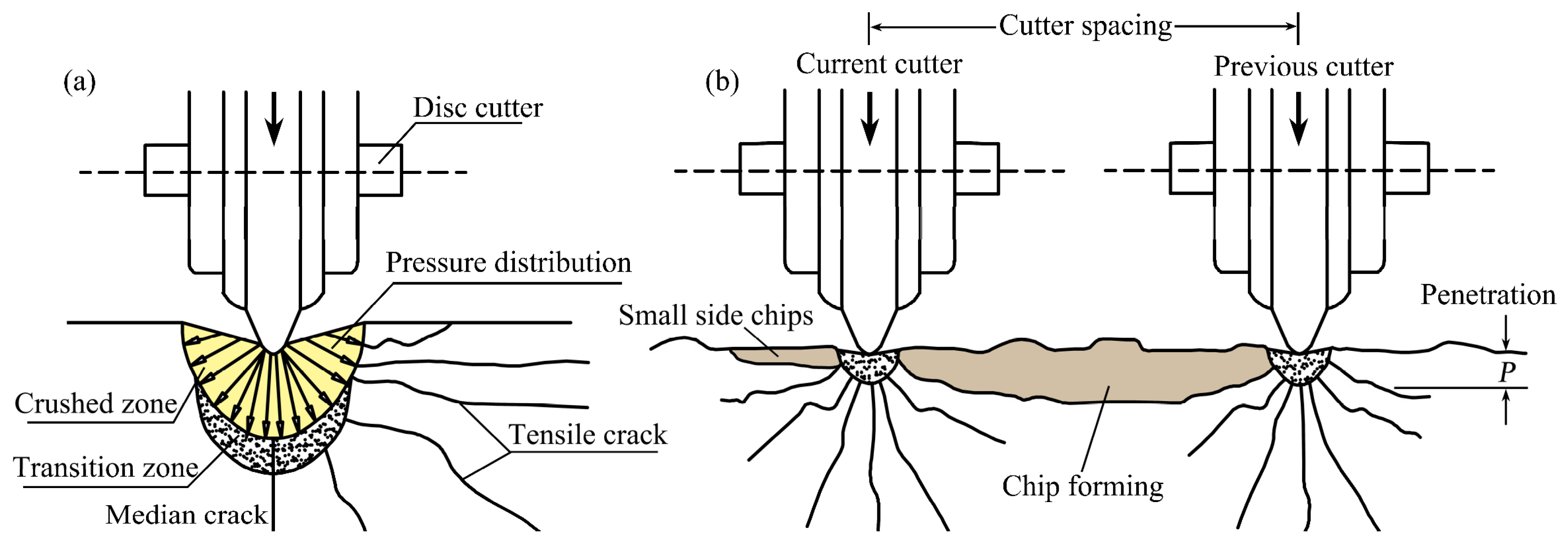
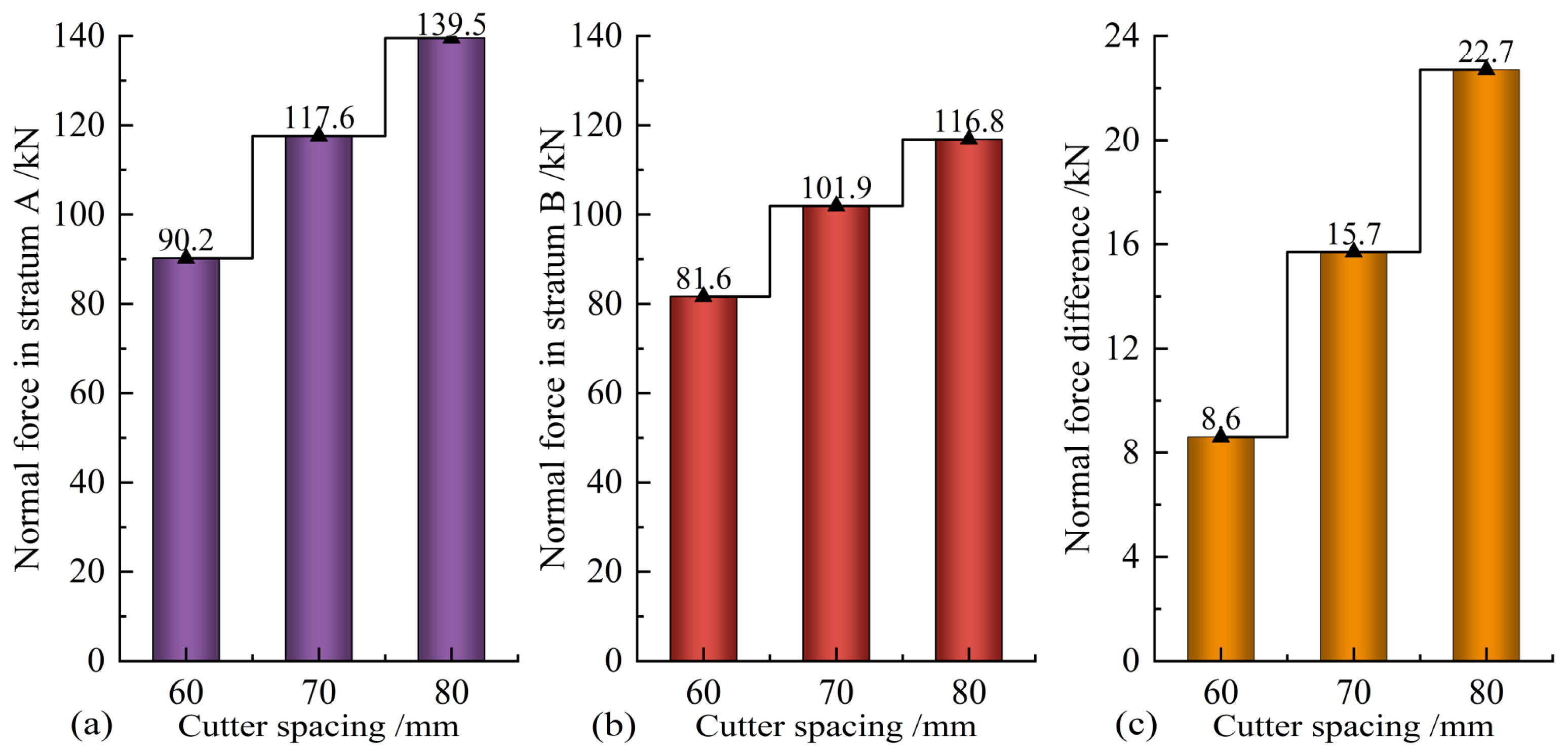
5.2. Matching of Cutter Spacing and Penetration in Composite Strata
6. Conclusions
- (1)
- The normal force of the cutter is comprehensively affected by the rolling radius and cutter spacing. The rolling force of the cutter is less affected by the cutter spacing when the cutter breaks rock.
- (2)
- For a homogeneous rock stratum, under a specific penetration, the larger the tip width, the more cracks generated by the cutter, and the better the rock-breaking effect, but at the same time, the greater the force on the cutter.
- (3)
- For soft–hard composite strata, the cutter selection should prioritize the cutter force, and the maximum force of cutter breaking rock appears in the hard rock stratum. It is safe enough to select the optimal cutter size in the harder stratum.
- (4)
- The force of cutter breaking rock in composite strata increases with the increase in penetration, and the force difference of cutters decreases with the decrease in cutter spacing.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, C.; Cui, J.; Zhang, Z.; Liu, H.; Huang, X.; Zhang, C. The role of TBM asymmetric tail-grouting on surface settlement in coarse-grained soils of urban area: Field tests and FEA modelling. Tunn. Undergr. Space Technol. 2021, 111, 103857. [Google Scholar] [CrossRef]
- He, H.; Wang, S.; Shen, W.; Zhang, W. The influence of pipe-jacking tunneling on deformation of existing tunnels in soft soils and the effectiveness of protection measures. Transp. Geotech. 2023, 42, 101061. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, K.; Dong, W.; Zhang, B. Study of rock-cutting process by disc cutters in mixed ground based on three-dimensional particle flow model. Rock Mech. Rock Eng. 2020, 53, 3485–3506. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, H.; Chen, Z.; Chen, X.; Huang, L.; Liu, S. Effects of jointed rock mass and mixed ground conditions on the cutting efficiency and cutter wear of tunnel boring machine. Rock Mech. Rock Eng. 2019, 52, 1303–1313. [Google Scholar] [CrossRef]
- Fu, K.; Qiu, D.; Xue, Y.; Shao, T.; Lan, G. TBM tunneling strata automatic identification and working conditions decision support. Autom. Constr. 2024, 163, 105425. [Google Scholar] [CrossRef]
- Mousapour, H.; Chakeri, H.; Darbor, M.; Hekmatnejad, A. Evaluating the wear of cutting tools using a tunnel boring machine laboratory simulator. Min. Miner. Depos. 2023, 17, 28–34. [Google Scholar] [CrossRef]
- Barzegari, G.; Khodayari, J.; Rostami, J. Evaluation of TBM cutter wear in Naghadeh water conveyance tunnel and developing a new prediction model. Rock Mech. Rock Eng. 2021, 54, 6281–6297. [Google Scholar] [CrossRef]
- Ren, D.J.; Shen, S.L.; Zhou, A.; Chai, J.C. Prediction of lateral continuous wear of cutter ring in soft ground with quartz sand. Comput. Geotech. 2018, 103, 86–92. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, J.; Pan, Y.; Kong, X.; Cui, X.; Huang, S.; Wei, L. Research advances of tunnel boring machine performance prediction models for hard rock. Chin. J. Rock Mech. Eng. 2016, 35, 2766–2786. (In Chinese) [Google Scholar]
- Geng, Q.; Wei, Z.; Meng, H. An experimental research on the rock cutting process of the gage cutters for rock tunnel boring machine (TBM). Tunn. Undergr. Space Technol. 2016, 52, 182–191. [Google Scholar]
- Pan, Y.; Liu, Q.; Peng, X.; Kong, X.; Liu, J.; Zhang, X. Full-scale rotary cutting test to study the influence of disc cutter installment radius on rock cutting forces. Rock Mech. Rock Eng. 2018, 51, 2223–2236. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, H.; Zhang, Z. Experimental and numerical investigations on the force characteristics of cutter in different regions of the TBM cutterhead. Tunn. Undergr. Space Technol. 2024, 149, 105800. [Google Scholar] [CrossRef]
- Gertsch, R.; Gertsch, L.; Rostami, J. Disc cutting tests in Colorado Red Granite: Implications for TBM performance prediction. Int. J. Rock Mech. Min. Sci. 2007, 44, 238–246. [Google Scholar] [CrossRef]
- Peng, X.; Liu, Q.; Pan, Y.; Lei, G.; Wei, L.; Luo, C. Study on the influence of different control modes on TBM disc cutter performance by rotary cutting tests. Rock Mech. Rock Eng. 2018, 51, 961–967. [Google Scholar] [CrossRef]
- Gong, Q.M.; Dong, G.L.; Yin, L.J.; Ma, S.; Lu, J.W. Comparison study on the rock linear and rotating cutting test by TBM cutter. Constr. Technol. 2017, 46, 61–66. (In Chinese) [Google Scholar]
- Cho, J.W.; Jeon, S.; Jeong, H.Y.; Chang, S.H. Evaluation of cutting efficiency during TBM disc cutter excavation within a Korean granitic rock using linear-cutting-machine testing and photogrammetric measurement. Tunn. Undergr. Space Technol. 2013, 35, 37–54. [Google Scholar] [CrossRef]
- Balci, C. Correlation of rock cutting tests with field performance of a TBM in a highly fractured rock formation: A case study in Kozyatagi-Kadikoy metro tunnel. Tunn. Undergr. Space Technol. 2009, 24, 423–435. [Google Scholar] [CrossRef]
- Entacher, M.; Schuller, E.; Galler, R. Rock failure and crack propagation beneath disc cutters. Rock Mech. Rock Eng. 2015, 48, 1559–1572. [Google Scholar] [CrossRef]
- Xia, Y.M.; Guo, B.; Cong, G.Q.; Zhang, X.H.; Zeng, G.Y. Numerical simulation of rock fragmentation induced by a single TBM disc cutter close to a side free surface. Int. J. Rock Mech. Min. Sci. 2017, 91, 40–48. [Google Scholar] [CrossRef]
- Gong, Q.M.; Zhao, J.; Hefny, A.M. Numerical simulation of rock fragmentation process induced by two TBM cutters and cutter spacing optimization. Tunn. Undergr. Space Technol. 2006, 21, 263–270. [Google Scholar] [CrossRef]
- Gong, Q.M.; Zhao, J.; Jiao, Y.Y. Numerical modeling of the effects of joint orientation on rock fragmentation by TBM cutters. Tunn. Undergr. Space Technol. 2005, 20, 183–191. [Google Scholar] [CrossRef]
- Zhang, X.H.; Xia, Y.M.; Liu, J.; Tan, Q. Study on characteristics of breaking rock by double edge central disc cutter under confining pressure. J. Northeast. Univ. Nat. Sci. 2017, 38, 839–844. (In Chinese) [Google Scholar]
- Wen, S.; Zhang, C. Experimental and simulation study on rock-breaking efficiency of disc cutters on composite rocks. Int. J. Rock Mech. Min. Sci. 2022, 153, 105089. [Google Scholar] [CrossRef]
- Cho, J.W.; Jeon, S.; Yu, S.H.; Chang, S.H. Optimum spacing of TBM disc cutters: A numerical simulation using the three-dimensional dynamic fracturing method. Tunn. Undergr. Space Technol. 2010, 25, 230–244. [Google Scholar] [CrossRef]
- Zhang, K.; Liu, Z.; Zhang, Z. A case study of cutting performance by a transverse cutting head based on three-dimensional particle flow model. KSCE J. Civ. Eng. 2023, 27, 2248–2262. [Google Scholar] [CrossRef]
- Potyondy, D.O.; Cundall, P.A. A bonded-particle model for rock. Int. J. Rock Mech. Min. Sci. 2004, 41, 1329–1364. [Google Scholar] [CrossRef]
- Xu, Z.M.; Huang, R.Q.; Zhang, Z.Y. The mechanical parameters of surrounding rocks considered in TBM cutter design. Chin. J. Rock Mech. Eng. 2001, 2, 230–234. (In Chinese) [Google Scholar]
- Gong, Q.M.; Jiao, Y.Y.; Zhao, J. Numerical modeling of the effects of joint spacing on rock fragmentation by TBM cutters. Tunn. Undergr. Space Technol. 2006, 21, 46–55. [Google Scholar] [CrossRef]
- Wijk, G. A model of tunnel boring machine performance. Geotech. Geol. Eng. 1992, 10, 19–40. [Google Scholar] [CrossRef]
- Sanio, H.P. Prediction of the performance of disc cutters in anisotropic rock. Int. J. Rock Mech. Min. Sci. 1985, 22, 153–161. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Main Parameter | Supplementary Remarks | |
|---|---|---|---|
| Axial loading device | Maximum advance load/t | 100 | |
| Maximum number of cutters | 3 | 17-inch and 19-inch disc cutters | |
| Advance speed/(mm·min−1) | 0.05–50 | ||
| Axial load control strategy | Closed-loop servo | Force control and displacement control | |
| Axial force control accuracy/N | 20 | ±1% | |
| Actuator stroke/mm | 900 | ||
| Cutter spacing/mm | 60–180 | Adjustable cutter spacing | |
| Rotation device | Inner ring diameter/m | 0.5 | |
| Outer ring diameter/m | 2 | ||
| Rock sample thickness /cm | 30–50 | ||
| Rotation speed/(r·min−1) | 0–2 | ||
| Maximum rotational torque/(kN·m) | ±10 | ||
| Stratum Type | Uniaxial Compressive Strength/MPa | Internal Friction Angle/° | Cohesion/ MPa | Elastic Modulus/ GPa | Poisson’s Ratio |
|---|---|---|---|---|---|
| A | 120 | 65 | 13.8 | 45 | 0.21 |
| B | 80 | 55 | 12.6 | 32 | 0.25 |
| C | 59.6 | 48.8 | 11.2 | 18 | 0.26 |
| D | 30.5 | 40.1 | 7.1 | 10 | 0.27 |
| Stratum Type | Effective Modulus/GPa | Normal-to-Shear Stiffness Ratio | Bond Effective Modulus/GPa | Bond Normal-to-Shear Stiffness Ratio | Tensile Strength/MPa | Cohesion/MPa | Friction Angle/° | Friction Coefficient |
|---|---|---|---|---|---|---|---|---|
| A | 20 | 3.0 | 10.5 | 3.0 | 26 | 18.5 | 25 | 0.20 |
| B | 12 | 3.0 | 6.2 | 3.0 | 17 | 8.6 | 27 | 0.25 |
| C | 7 | 3.0 | 1.8 | 3.0 | 8 | 5.2 | 30 | 0.28 |
| D | 0.5 | 3.0 | 0.2 | 3.0 | 2 | 1.5 | 35 | 0.30 |
| Types of Cutter Ring | Tip Angle/° | Tip Width/mm |
|---|---|---|
| #1 | 35° | 10 |
| #2 | 35° | 15 |
| #3 | 35° | 20 |
| #4 | 35° | 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Xia, M.; Huang, F.; Zhang, Z. Research on Rock-Breaking Characteristics of Cutters and Matching of Cutter Spacing and Penetration for Tunnel Boring Machine. Buildings 2024, 14, 1757. https://doi.org/10.3390/buildings14061757
Zhang H, Xia M, Huang F, Zhang Z. Research on Rock-Breaking Characteristics of Cutters and Matching of Cutter Spacing and Penetration for Tunnel Boring Machine. Buildings. 2024; 14(6):1757. https://doi.org/10.3390/buildings14061757
Chicago/Turabian StyleZhang, Huipeng, Ming Xia, Fengyuan Huang, and Zhiqiang Zhang. 2024. "Research on Rock-Breaking Characteristics of Cutters and Matching of Cutter Spacing and Penetration for Tunnel Boring Machine" Buildings 14, no. 6: 1757. https://doi.org/10.3390/buildings14061757
APA StyleZhang, H., Xia, M., Huang, F., & Zhang, Z. (2024). Research on Rock-Breaking Characteristics of Cutters and Matching of Cutter Spacing and Penetration for Tunnel Boring Machine. Buildings, 14(6), 1757. https://doi.org/10.3390/buildings14061757