
Design and Hysteretic Performance Analysis of a Novel Multi-Layer Self-Centering Damper with Shape Memory Alloy


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Damping Device Construction and Operating Principles
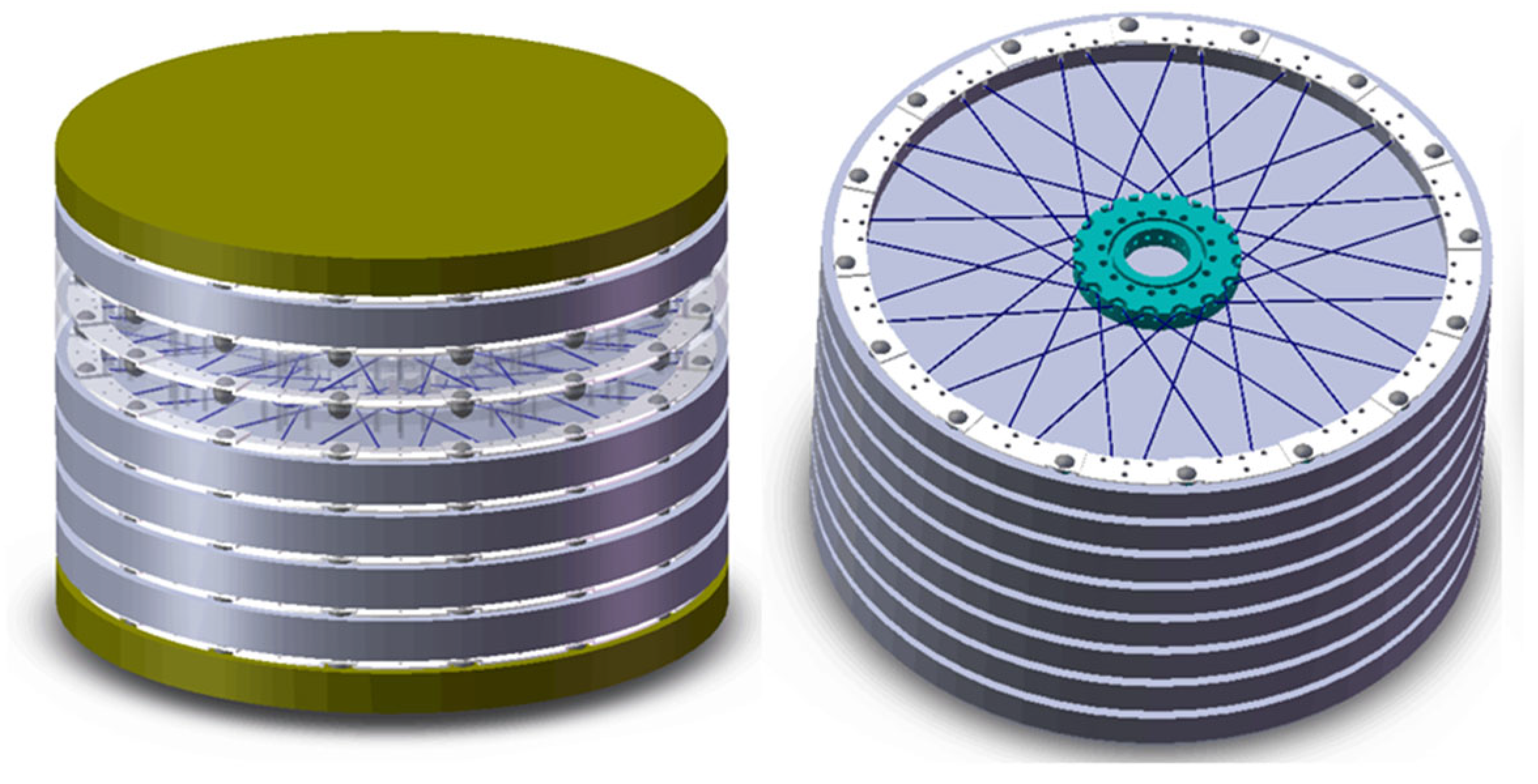
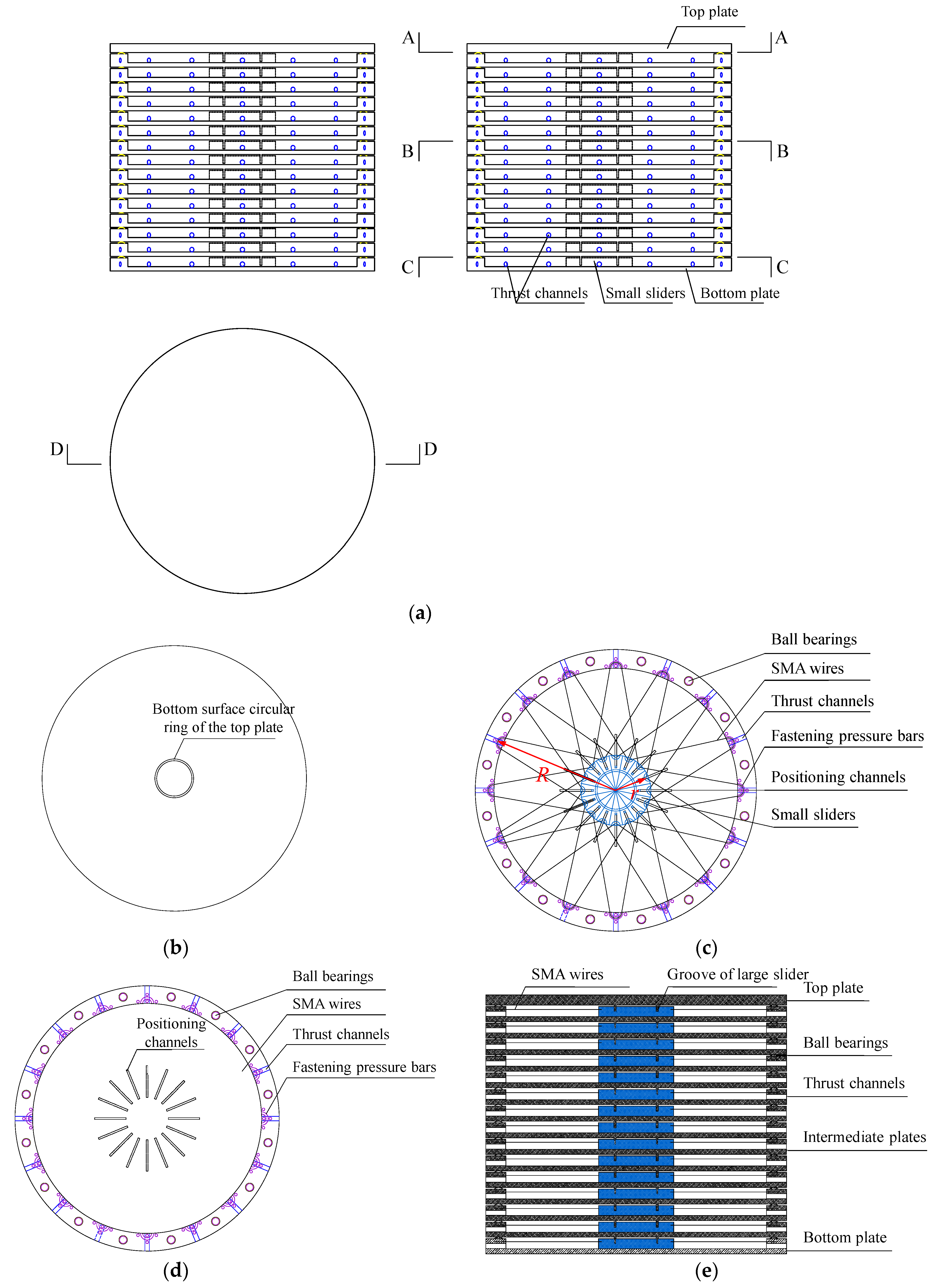
2.1. Damping Device Construction
2.2. Operating Principles of the Damper
2.3. Advantages of the Novel Damper
- (1)
- Effective energy dissipation: It possesses excellent energy dissipation capabilities, reducing the transmission of vibration energy from the bottom of the vibration isolation layer to the upper structure, thus lowering the vibration response of the upper structure.
- (2)
- Compact and adjustable design: The stacked arrangement allows the damper to maintain a relatively large and adjustable stroke within the limited space of the vibration isolation layer.
- (3)
- Variable stiffness characteristics: By carefully setting the diameter, quantity, and tensile strain of shape memory wires in each layer, the damper can achieve variable stiffness characteristics. It possesses some initial stiffness to prevent frequent structural oscillations during normal use, minimal vibration isolation stiffness to reduce upper structure vibration responses, and significant limiting stiffness to prevent excessive displacement of vibration isolation mounts, which could lead to structural overturning.
- (4)
- Excellent self-restoring ability: The symmetrically arranged shape memory alloy wires utilize their inherent superelastic properties to return the structure to its original position after external vibration excitations cease. This feature helps reduce or eliminate residual deformation in the vibration isolation layer.
- (5)
- High-temperature resistance, corrosion resistance, and fatigue resistance: The damper is capable of withstanding harsh environmental conditions, meeting the requirements of adverse operating environments.
- (6)
- Simple construction and easy installation: It has a straightforward design and is easy to install, making it suitable for a wide range of passive control applications in civil engineering.
3. Restoring Force-Displacement Hysteretic Curve Calculation Model
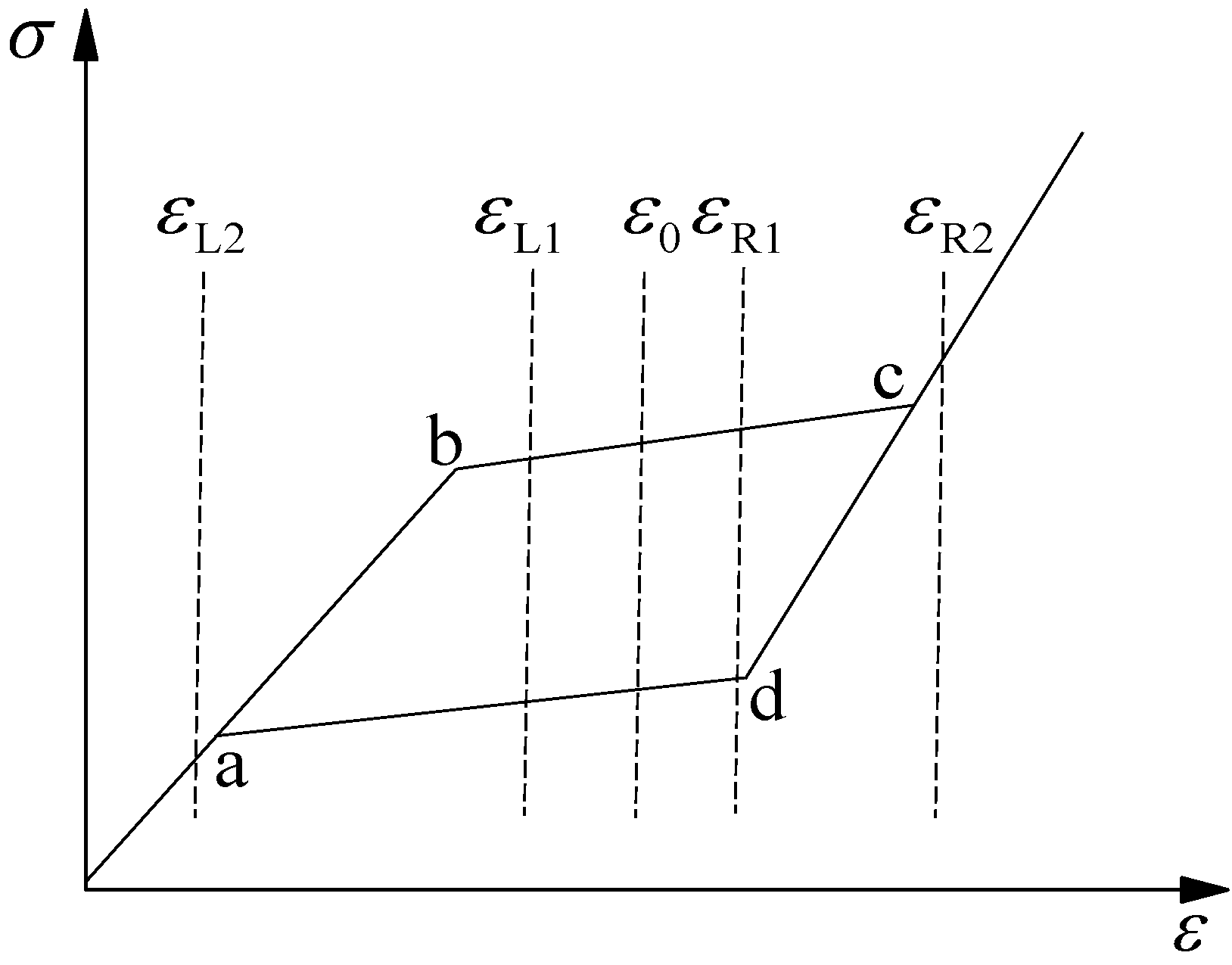
3.1. Hyperelastic Constitutive Model of SMA Wires
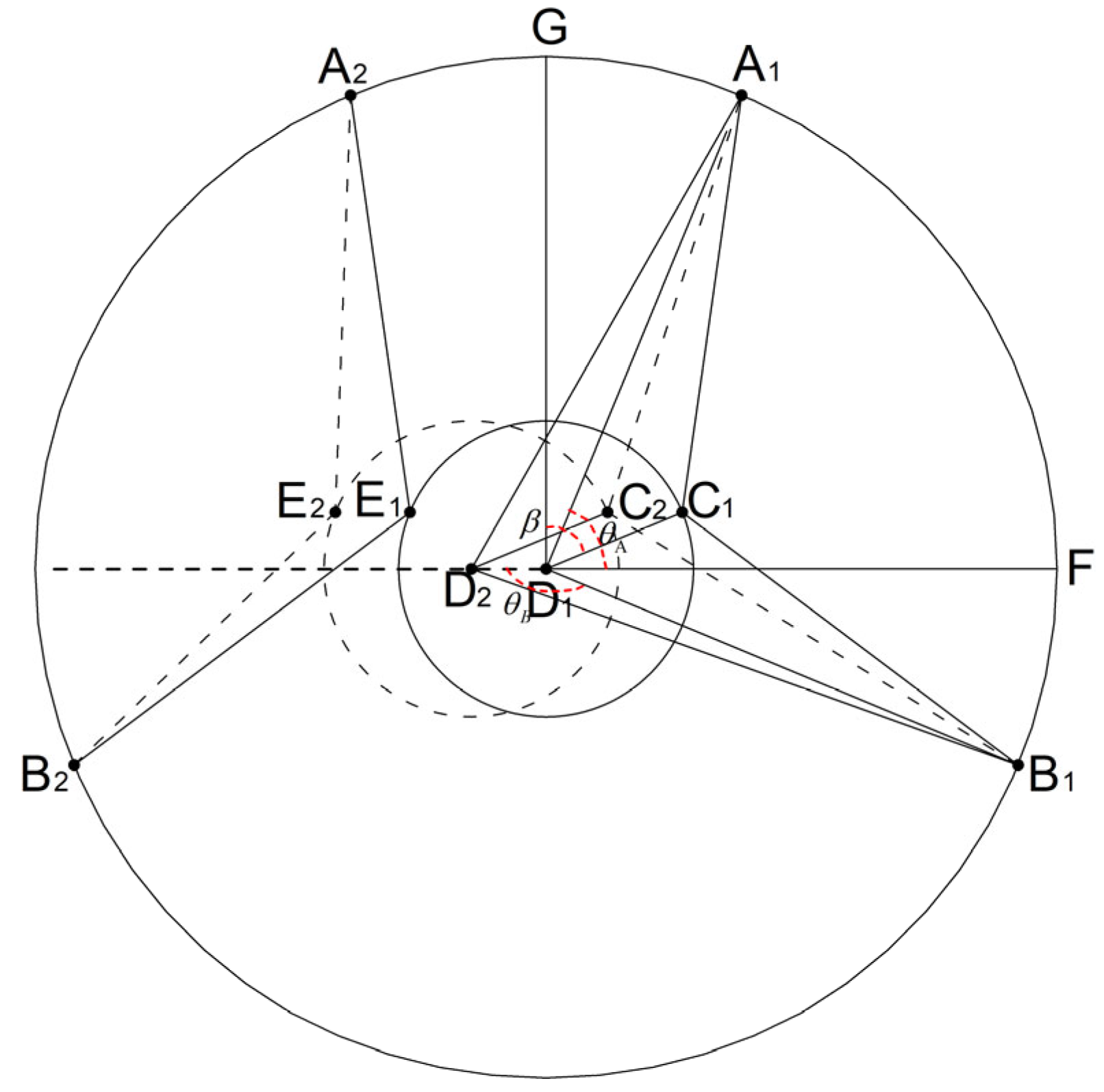
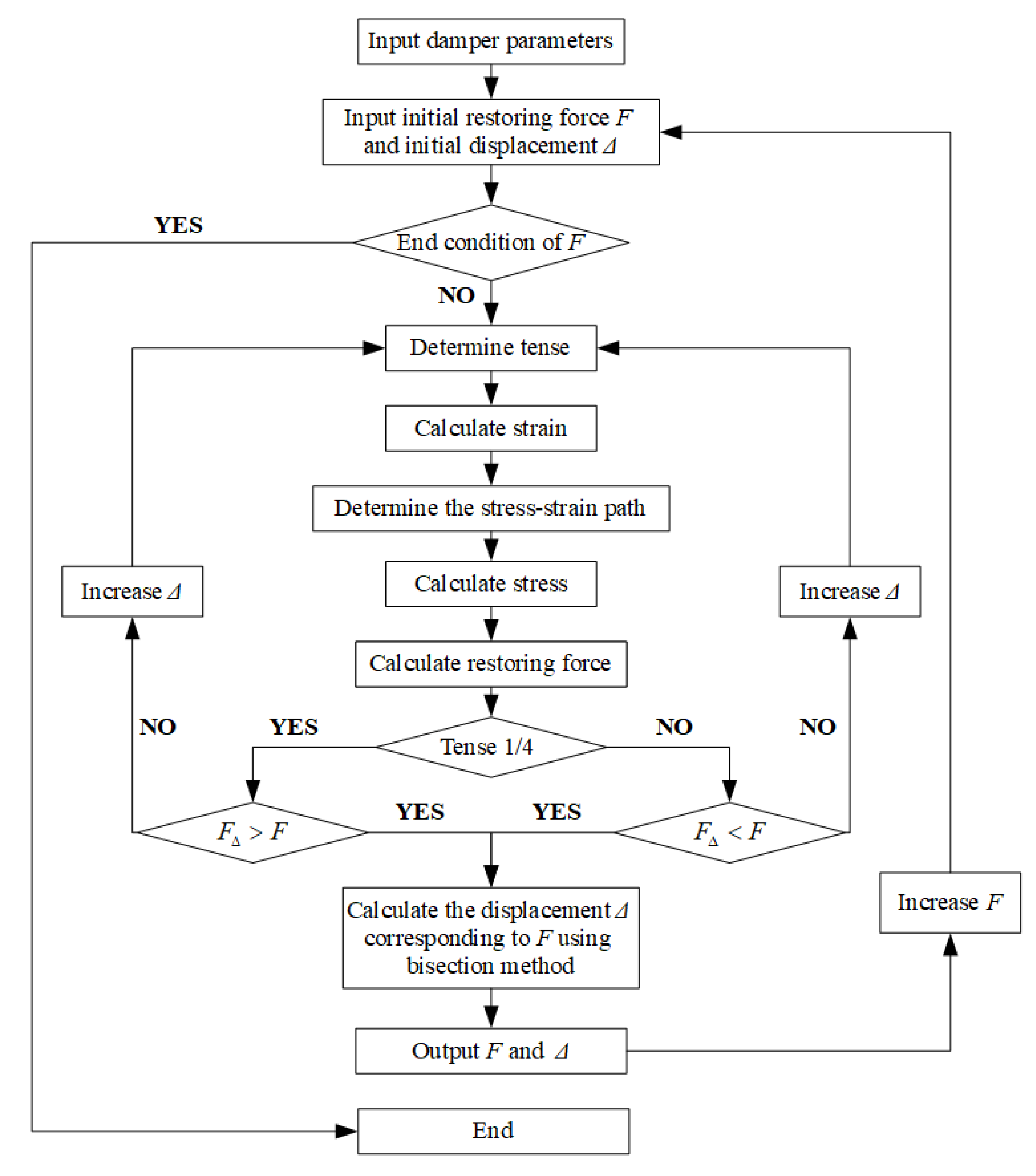
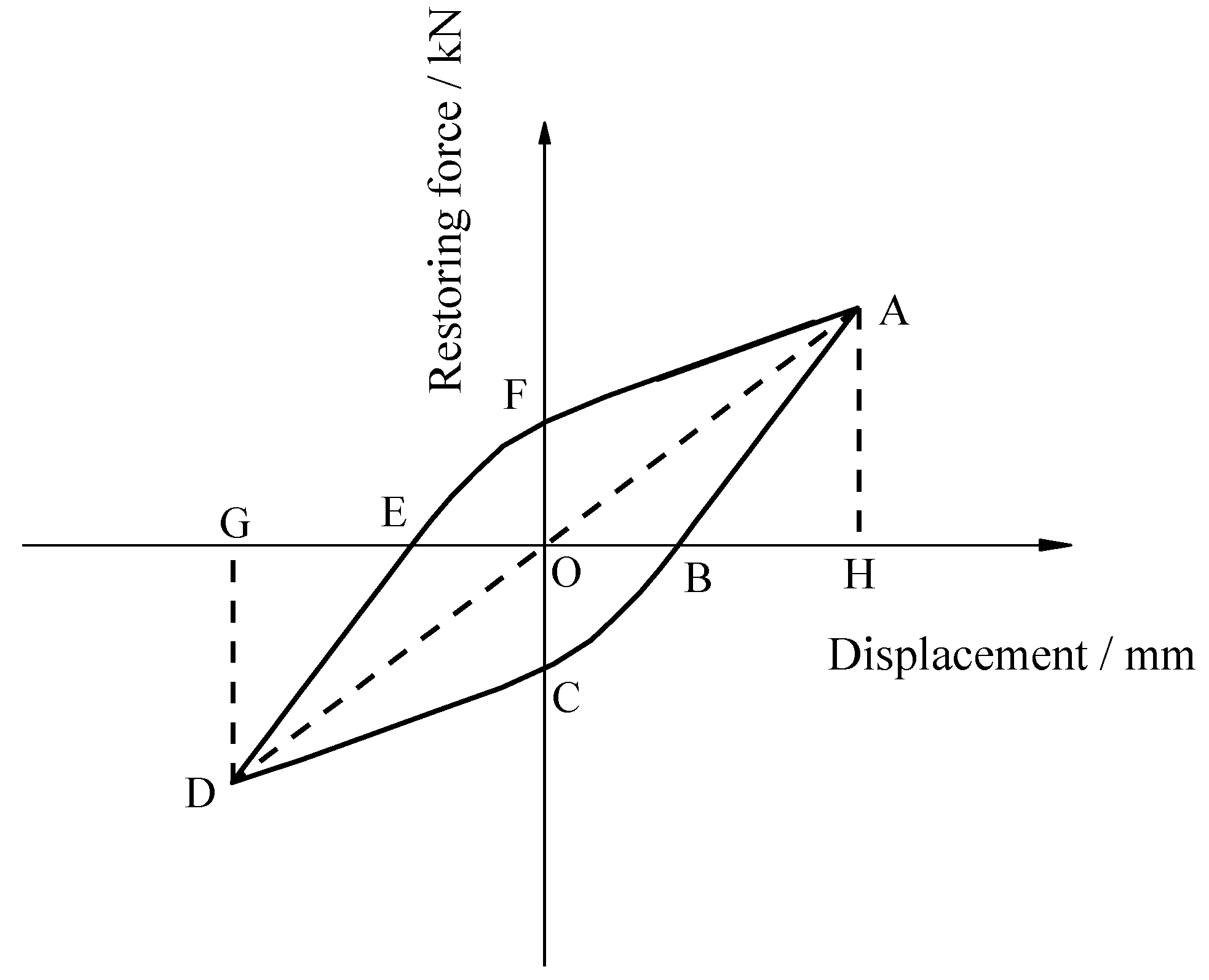
3.2. Restoring Force-Displacement Relationship of the Novel Damper
4. Parameter Analysis
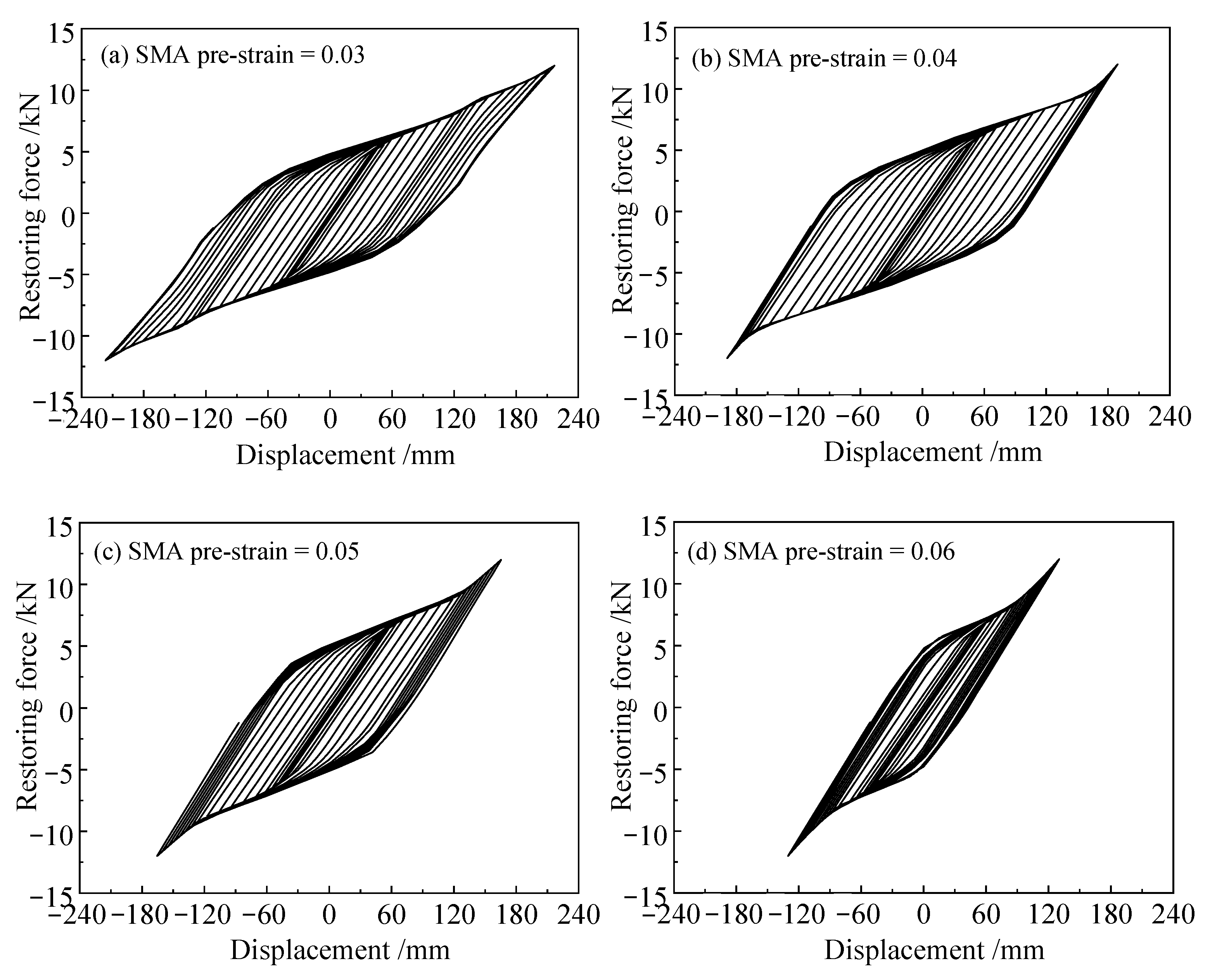
4.1. Effect of SMA Pre-Strain
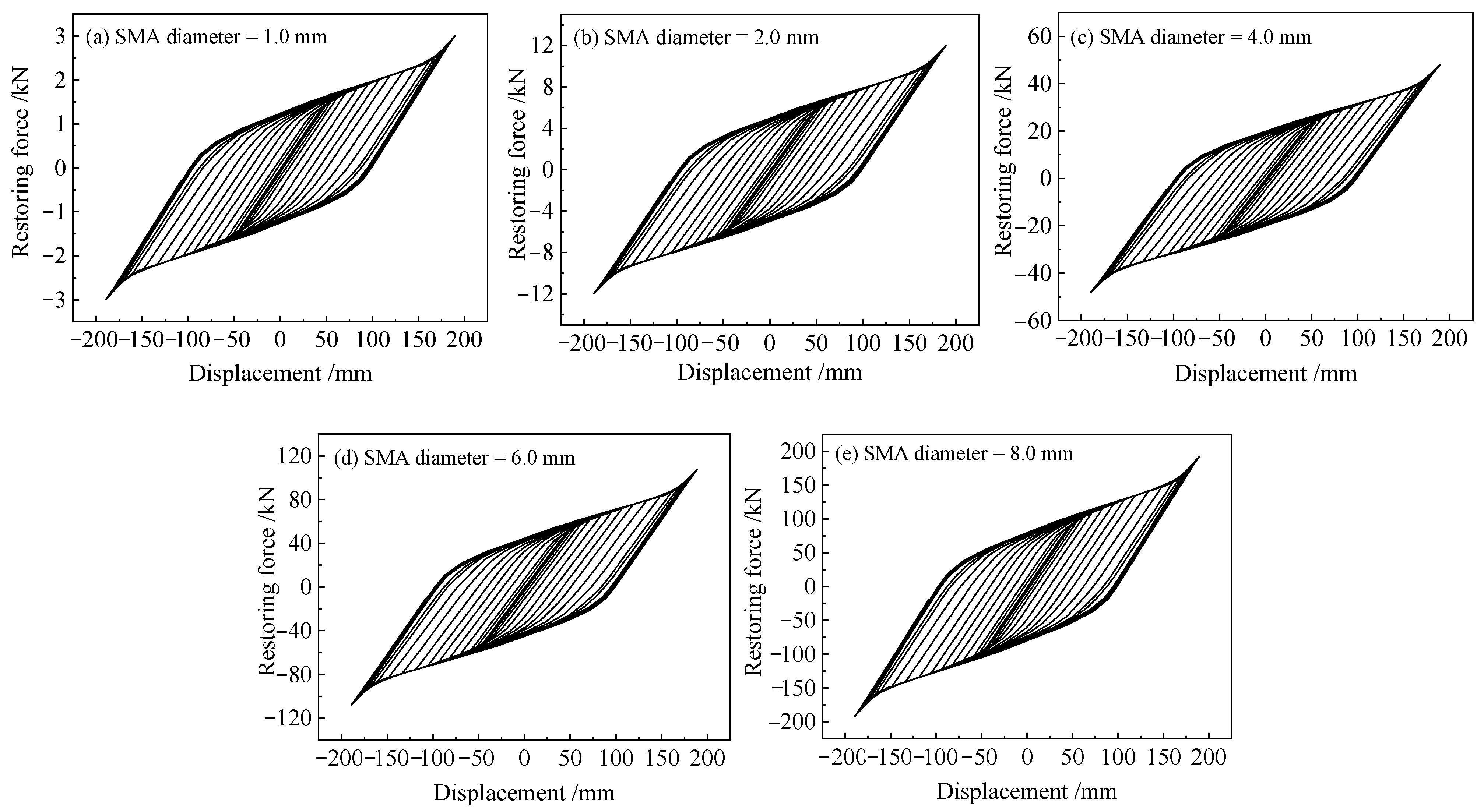
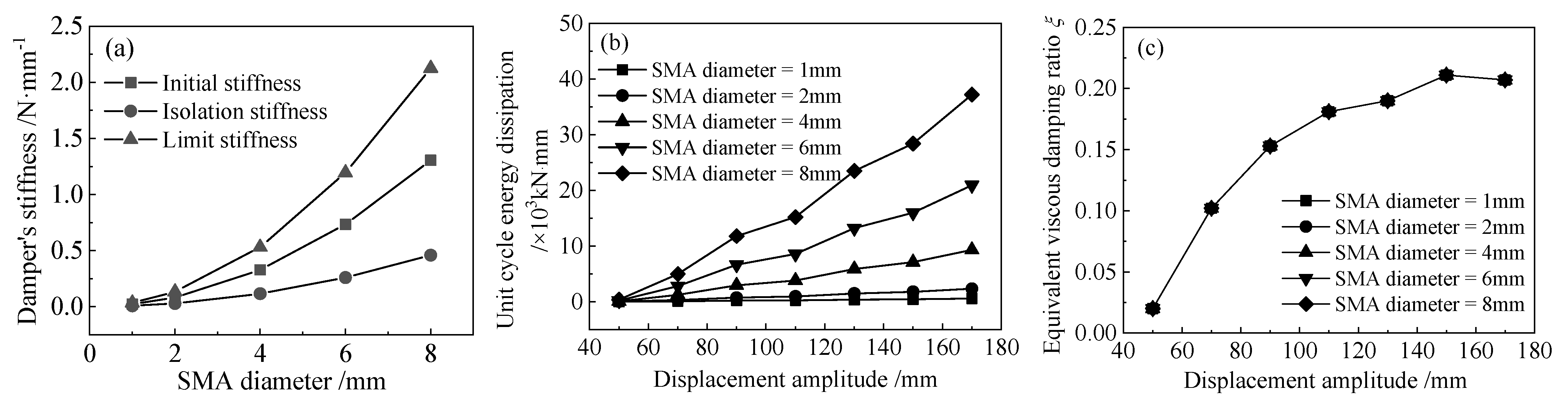
4.2. Effect of SMA Diameter
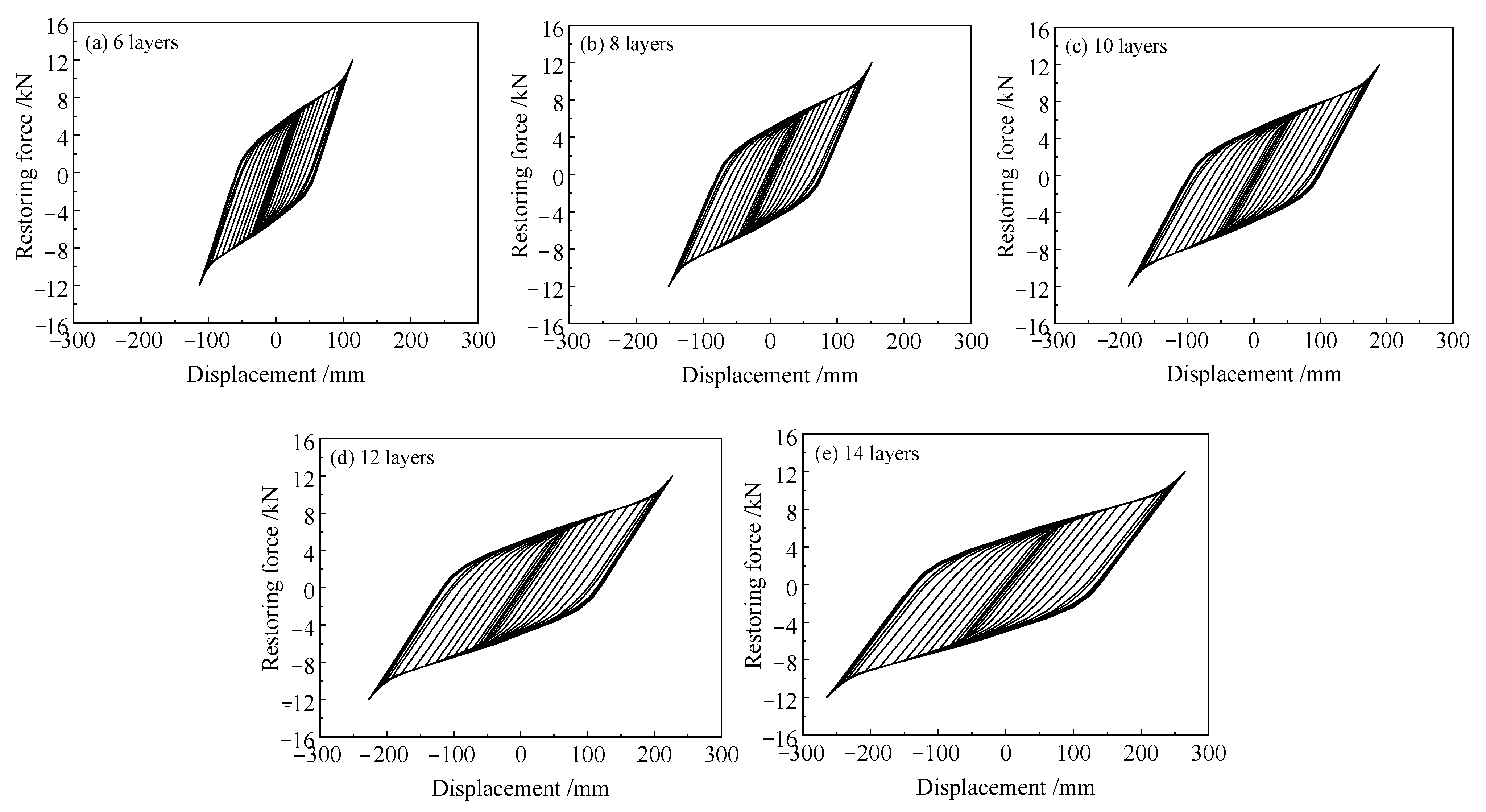
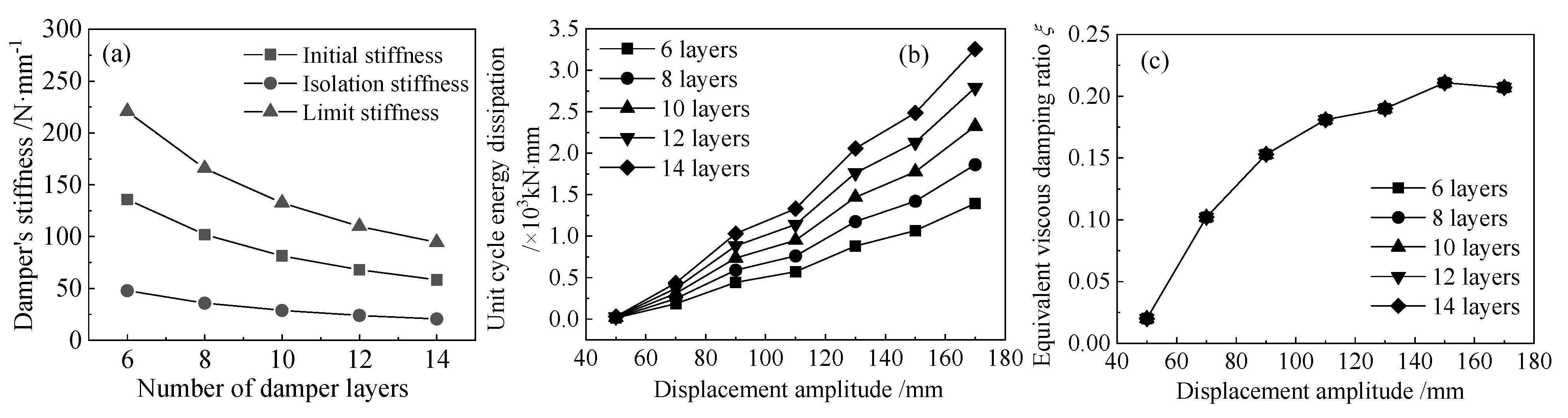
4.3. Effect of the Number of Damper Layers
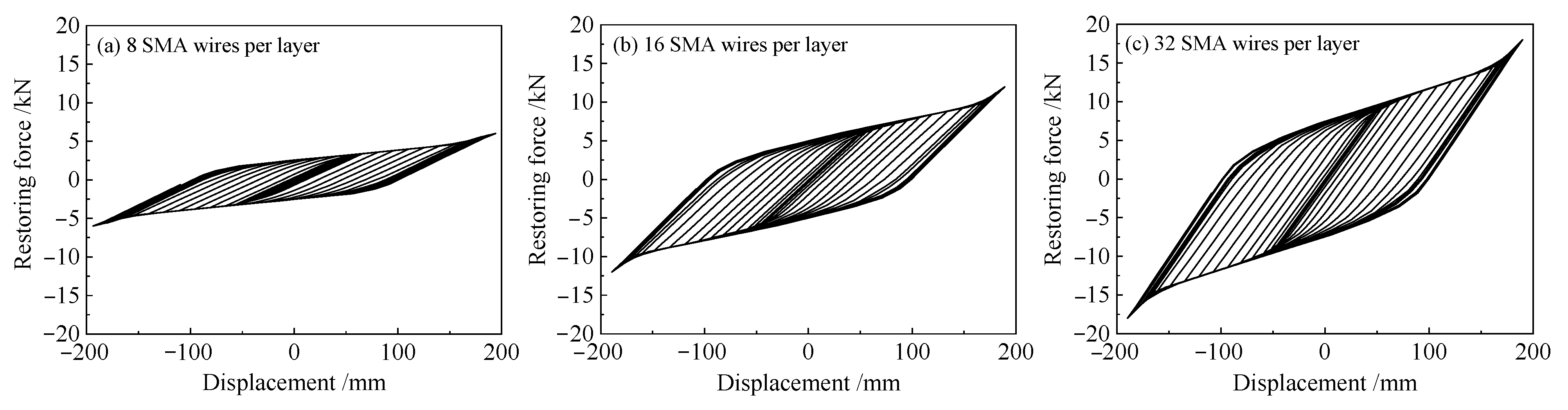
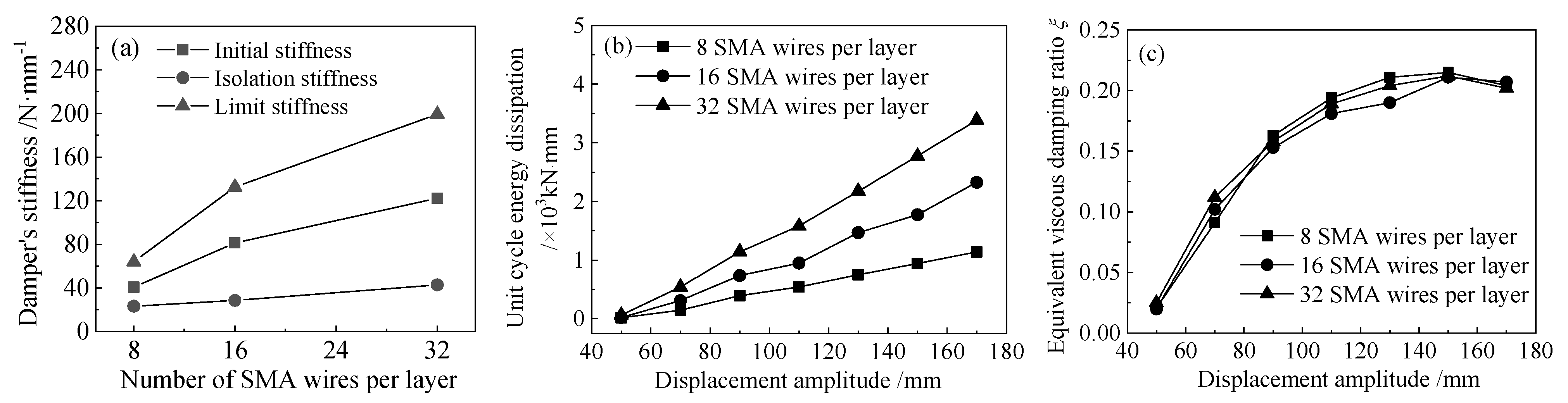
4.4. Effect of the Number of SMA Wires per Layer
5. Conclusions
- (1)
- The restoring force–displacement hysteretic curve of the novel SMA damper exhibits a full spindle shape. The damper possesses good energy dissipation capability, self-recovery function, significant stroke, and unique variable stiffness characteristics (i.e., appropriate initial stiffness, minimal isolation stiffness, and significant limit stiffness). The established damper restoring force–displacement hysteresis calculation model accurately predicts the damper’s hysteresis behavior.
- (2)
- The results of the parameter analysis indicate that the SMA pre-strain has a minor impact on the damper’s stiffness but a significant influence on unit cyclic energy dissipation and equivalent damping ratio. As the SMA pre-strain increases, the maximum stroke of the damper continuously decreases, while the unit cyclic energy dissipation initially increases and then decreases, with the optimal energy dissipation achieved at a pre-strain of 0.04. As the SMA diameter increases, both the damper’s stiffness and unit cyclic energy dissipation increase, while the maximum stroke and equivalent damping ratio remain unchanged. With an increasing number of damper layers, the maximum stroke and unit cyclic energy dissipation continuously increase, whereas the stiffness decreases and the equivalent damping ratio remains constant. As the number of SMA wires per layer increases from 8 to 16 and 32, the maximum stroke and equivalent damping ratio present little variation, but the damper’s stiffness and unit cyclic energy dissipation continuously increase.
6. Patents
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Monjardin-Quevedo, J.G.; Valenzuela-Beltran, F.; Reyes-Salazar, A.; Leal-Graciano, J.M.; Torres-Carrillo, X.G.; Gaxiola-Camacho, J.R. Probabilistic Assessment of Buildings Subjected to Multi-Level Earthquake Loading Based on the PBSD Concept. Buildings 2022, 12, 20. [Google Scholar] [CrossRef]
- Jia, H.; Lin, J.; Liu, J. Review of Seismic Fragility Analysis of Building Structure. Technol. Earthq. Disaster Prev. 2019, 14, 42–51. [Google Scholar]
- Ping, O.J. Structural Vibration Control Active, Semi-Active and Intelligent Control; Science Press: Beijin, China, 2003. [Google Scholar]
- Zhou, Y.; Wu, H.; Gu, A.Q. Earthquake engineering: From earthquake resistance, energy dissipation, and isolation, to resilience. Eng. Mech. 2019, 36, 1–12. [Google Scholar]
- Clemente, P. Seismic isolation: Past, present and the importance of SHM for the future. J. Civ. Struct. Health Monit. 2017, 7, 217–231. [Google Scholar] [CrossRef]
- Yu, L.; Chen, K.; Zhang, Y.; Liu, J.; Yang, L.; Shi, Y. Microstructures and mechanical properties of NiTi shape memory alloys fabricated by wire arc additive manufacturing. J. Alloys Compd. 2022, 892, 162193. [Google Scholar] [CrossRef]
- Mccormick, J.; Desroches, R. Effect of Mechanical Training on the Properties of Superelastic Shape Memory Alloys for Seismic Applications. In Smart Structures and Materials 2005: Smart Structures and Integrated Systems, Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 7–10 March 2005; The International Society for Optical Engineering (SPIE): San Diego, CA, USA, 2005; Volume 5764. [Google Scholar]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Li, H.; Mao, C.X.; Ou, J.P. Experimental and theoretical study on two types of shape memory alloy devices. Earthq. Eng. Struct. Dyn. 2008, 37, 407–426. [Google Scholar] [CrossRef]
- Yu, Q.C.; Liu, C.H.; Liu, A.R. The analysis of structure vibration control by using shape memory alloy dampers with magnifying story drift. J. Earthq. Eng. Eng. Vib. 2008, 2008, 151–156. [Google Scholar]
- Chen, Y.; Lv, X.L.; Jiang, H.J. Seismic performance study on new enhanced energy dissipation SMA damper. J. Hunan Univ. (Nat. Sci.) 2013, 40, 31–38. [Google Scholar]
- Huang, Z.; Li, H.N.; Fu, X. Optimum design of a re-centering deformation-amplified SMA damper. Eng. Mech. 2019, 36, 202–210. [Google Scholar]
- Parulekar, Y.M.; Reddy, G.R.; Vaze, K.K.; Guha, S.; Gupta, C.; Sreekala, K.M. Seismic response attenuation of structures using shape memory alloy dampers. Struct. Control Health Monit. 2012, 19, 102–119. [Google Scholar] [CrossRef]
- Li, H.N.; Qian, H.; Song, G.B.; Gao, D.W. A type of shape memory alloy damper: Design, experiment and numerical simulation. J. Vib. Eng. 2008, 21, 179–184. [Google Scholar]
- Li, H.N.; Huang, Z.; Fu, X.; Li, G. A re-centering deformation-amplified shape memory alloy damper for mitigating seismic response of building structures. Struct. Control Health Monit. 2018, 25, e2233.1–e2233.20. [Google Scholar] [CrossRef]
- Xue, S.D.; Shi, G.L.; Zhuang, P. Performance testing of SMA incorporated friction dampers. J. Earthq. Eng. Eng. Vib. 2007, 27, 145–151. [Google Scholar]
- Ren, W.J.; Wang, L.Q.; Zhicheng, M.A.; Yao, H.Z. Investigation on mechanical behavior of innovative shape memory alloy-friction damper. J. Build. Struct. 2013, 34, 83–90. [Google Scholar]
- Qian, H.; Li, H.; Song, G. Experimental investigations of building structure with a superelastic shape memory alloy friction damper subject to seismic loads. Smart Mater. Struct. 2016, 25, 125026. [Google Scholar] [CrossRef]
- Sun, T.; Li, H.N. Experimental investigation of an innovative multidimensional SMA damper. Eng. Mech. 2018, 35, 178–185. [Google Scholar]
- Qiu, C.X.; Liu, J.W.; Du, X.L. Numerical simulation and parametric study of shape memory alloy slip friction dampers. Eng. Mech. 2021, 39, 69–79. [Google Scholar] [CrossRef]
- Wang, W.; Fang, C.; Zhang, A.; Liu, X.S. Manufacturing and performance of a novel self-centring damper with shape memory alloy ring springs for seismic resilience. Struct. Control Health Monit. 2019, 26, e2337. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhao, L.; Li, A.; Xu, S. Design and Hysteretic Performance Analysis of a Novel Multi-Layer Self-Centering Damper with Shape Memory Alloy. Buildings 2024, 14, 483. https://doi.org/10.3390/buildings14020483
Zhang H, Zhao L, Li A, Xu S. Design and Hysteretic Performance Analysis of a Novel Multi-Layer Self-Centering Damper with Shape Memory Alloy. Buildings. 2024; 14(2):483. https://doi.org/10.3390/buildings14020483
Chicago/Turabian StyleZhang, Hua, Lu Zhao, Anbang Li, and Shanhua Xu. 2024. "Design and Hysteretic Performance Analysis of a Novel Multi-Layer Self-Centering Damper with Shape Memory Alloy" Buildings 14, no. 2: 483. https://doi.org/10.3390/buildings14020483
APA StyleZhang, H., Zhao, L., Li, A., & Xu, S. (2024). Design and Hysteretic Performance Analysis of a Novel Multi-Layer Self-Centering Damper with Shape Memory Alloy. Buildings, 14(2), 483. https://doi.org/10.3390/buildings14020483