1. Introduction
The rotational stiffness of the beam-to-column joint plays an important role in steel structures since it directly affects the deformation, internal forces distribution, and stability of the structure [
1]. Although the assumption of pinned or rigid joints simplifies the structural model and is more convenient for designers’ daily work, most of the joints used in practice have a certain rotational stiffness, which is called semi-rigid joints. The potential risks posed by this discrepancy between reality and assumptions are inaccuracy and insecurity in structural design [
2,
3]. Moreover, this problem is becoming more prominent with the bolted connections that are used extensively in modern steel structures, since many research results [
4,
5,
6,
7] have confirmed that the use of these types of semi-rigid joints can effectively reduce the cost of joint manufacturing and field erection and is a more economical scheme. At present, the provisions for structural steel buildings in various countries [
8,
9,
10] clearly indicate that the real behavior of the joint should be considered. The moment–rotation curve of the joint should be assumed during the structure analysis, and the properties of the final joint must be guaranteed to conform to the pre-assumption.
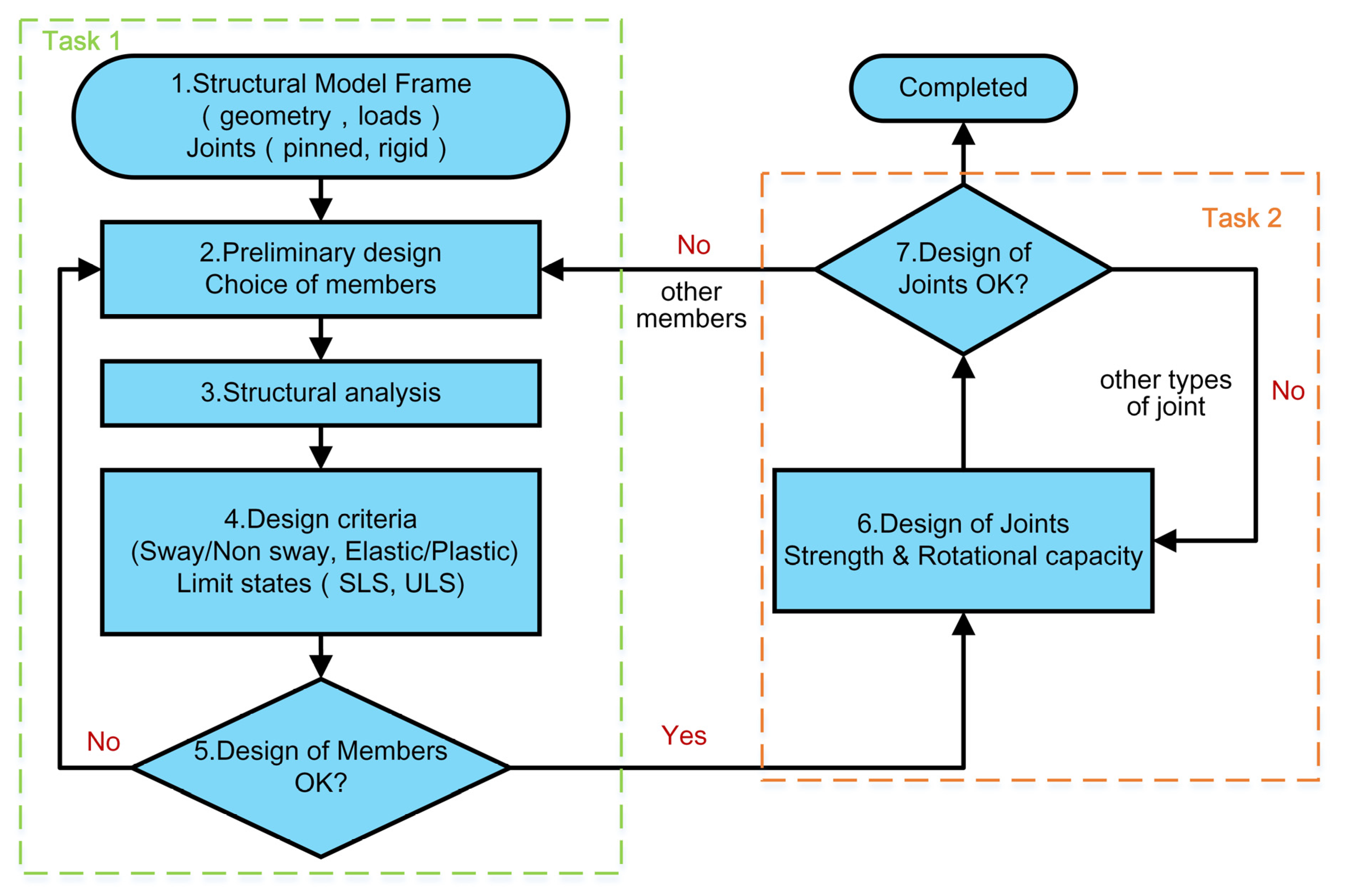
Before proceeding with the design of semi-rigid steel frames, two key issues need to be addressed. One is how to establish a joint model; the other is how to integrate the semi-rigid joint design with the member design in a convenient way.
For the former, research has been conducted and various joint models and databases have been proposed. From elastic, to inelastic ultimate, to post-ultimate and post-fracture ranges [
11,
12,
13,
14]. From open-section joints, to closed-section joints, pure steel structural joints to composite structural joints [
15,
16,
17]. From standard static loading to fire and seismic loading, 2D in-plane loading, to 3D space loading [
18,
19,
20,
21]. Diaz [
22] summarized the existing computational models and pointed out that the Component Method (CM) attracts the most attention and has been developed mostly due to its clear physical meaning and low computational cost. This method can be applied to almost any type of joint, provided that the effective mechanical components in the joint are reasonably decomposed. EN1993-1-8 [
23] is the first standard in the world to incorporate CM into structural design, which combined with SCI P398 [
24] to provide extensive guidelines for calculating the strength, stiffness, and rotational capacity of joints. However, decomposing and assembling the joint components is a rather time-consuming and complex task, which limits the exploitation of advanced possibilities for engineers. In this context, Jaspart [
25], Weynand, and Feldman [
26] proposed some useful tools based on EN1993-1-8, including design tables, sheets, and software. Furthermore, the introduction of commercial software [
27,
28] has made the design of semi-rigid joints very easy, with quick results in just a few clicks.
In contrast, limited open literature to date has reported the latter, although attempts to this aspect had been made in the early stages of the research of semi-rigid joints. Xu et al. [
29] firstly used the modified semi-rigid beam element for structural analysis. In their study, the joint stiffness was only defined as a real number within a certain range without involving any joint configuration parameters. Subsequently, Dhillon and O’Malley [
30] developed an interactive design method for semi-rigid steel frames. By using the Fry–Morris model [
31] to define the joint moment–rotation curve, engineers can interact with the computer to change the connection details and obtain an economical and practical design. To overcome the difficulty of estimating the joint stiffness in the preliminary frame design phase in which the joints have not been designed yet. Steenhuis et al. [
6,
32] introduced the conception of joint pre-design into the traditional steel structure design process. In a similar way, Bayo et al. [
33] relaxed the assumption of joint pre-design to some extent by introducing more variables that affect the joint properties and proposed a practical method that can simultaneously optimize the member profile size and the joint details.
In general, all of the above design methods of semi-rigid steel frames are essentially a kind of forward method. That is, the initial rotational stiffness of the joint is calculated by more or less pre-set joint geometric parameters, and then introduced into the structural model for analysis and member design, finally, the joint details need to be refined to ensure that the obtained joint properties meet the previous assumptions. However, in the design practice, the joint configuration parameters are diverse and complex, as well as sensitive to the joint properties. It is difficult for engineers who do not have an in-depth knowledge of semi-rigid joints to grasp the direction of adjustment when designing. Despite the many advantages of semi-rigid steel frames, their practical application is rare due to the lack of proper design methods. Therefore, developing convenient methods is essential.
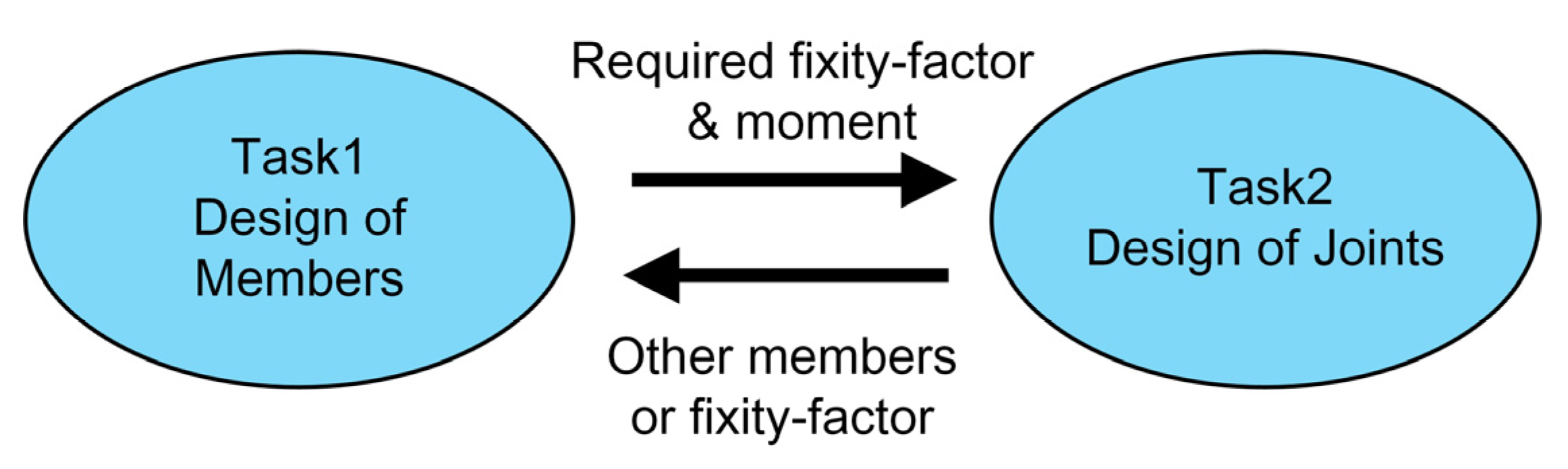
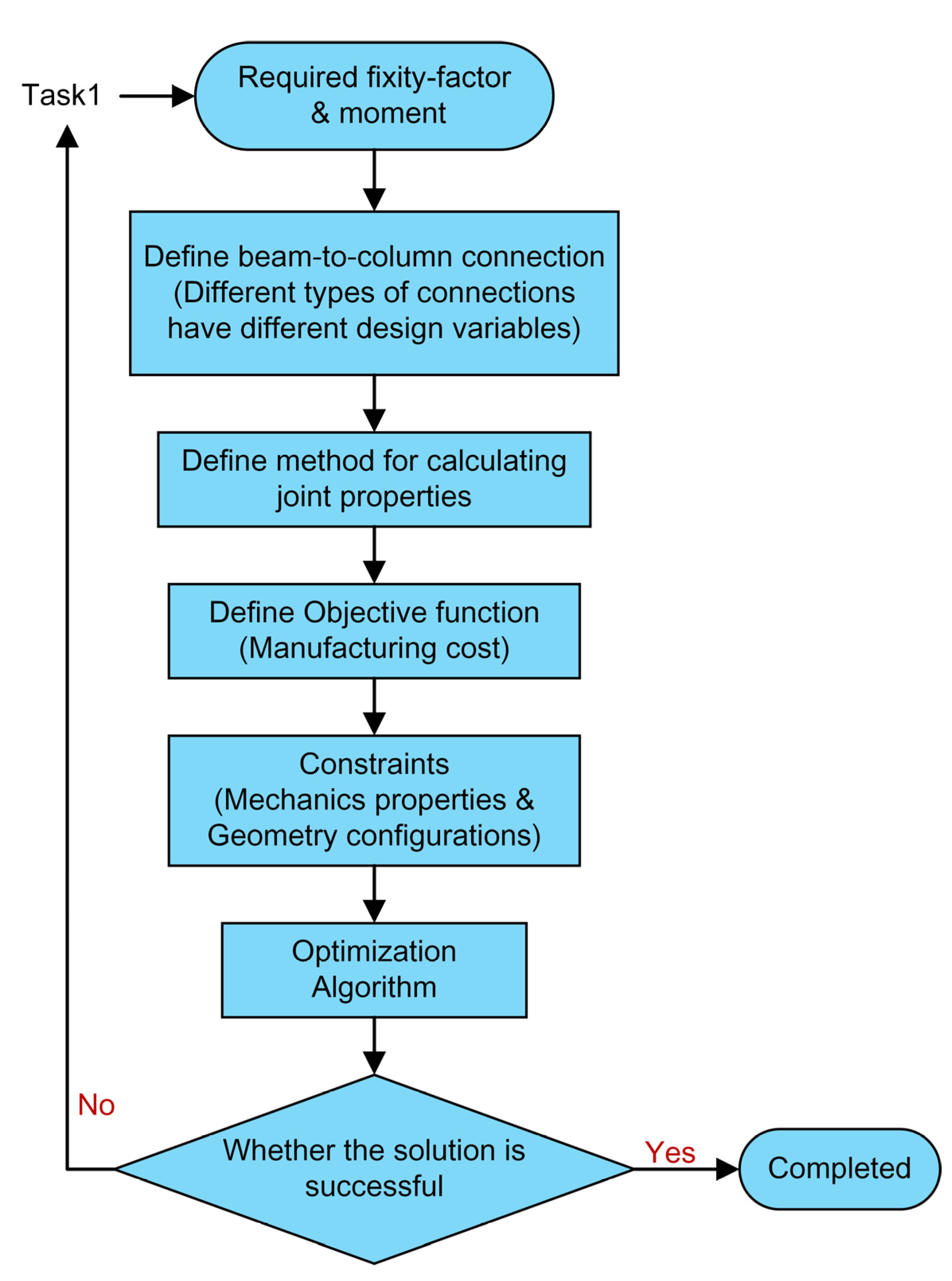
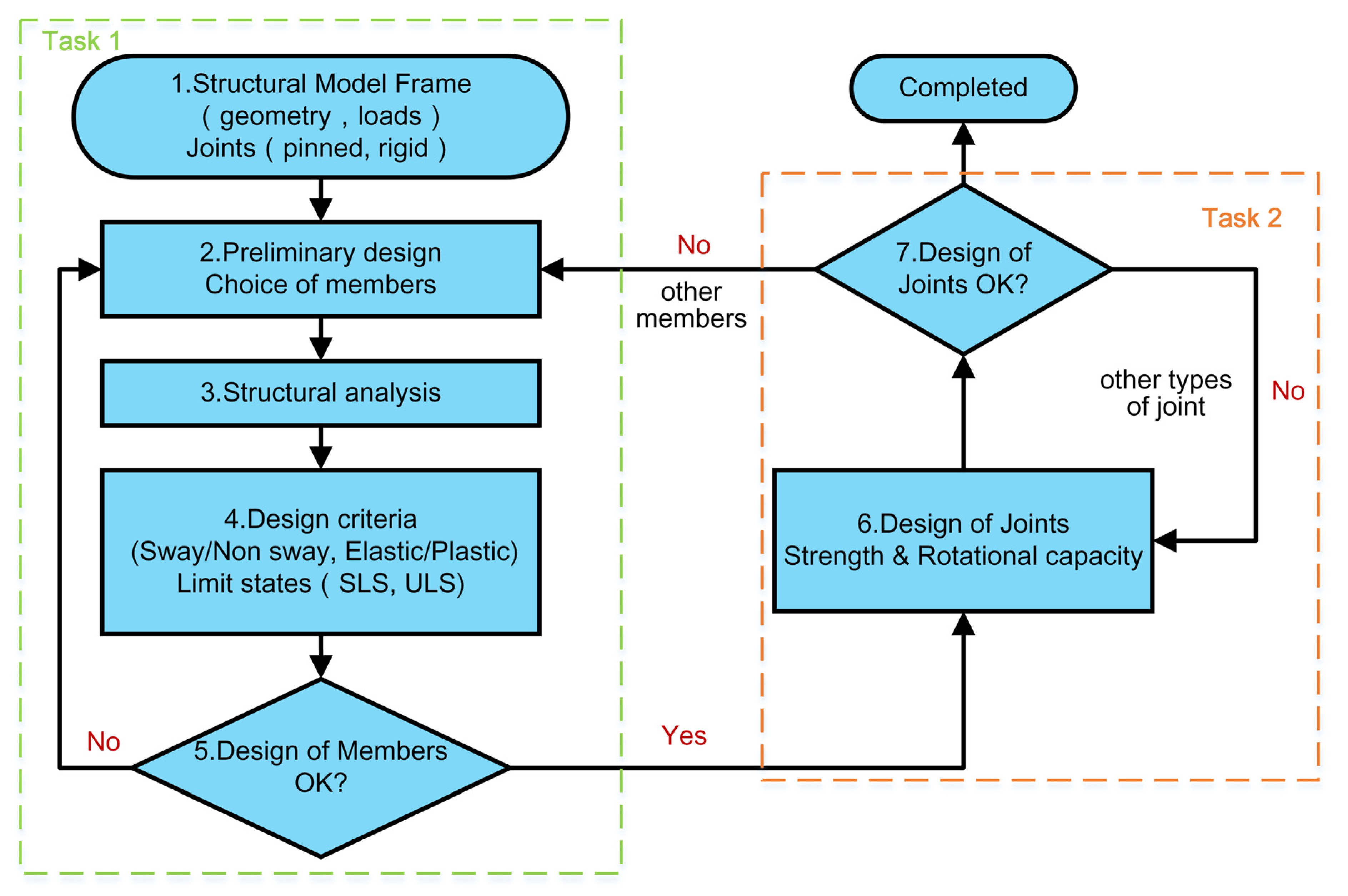
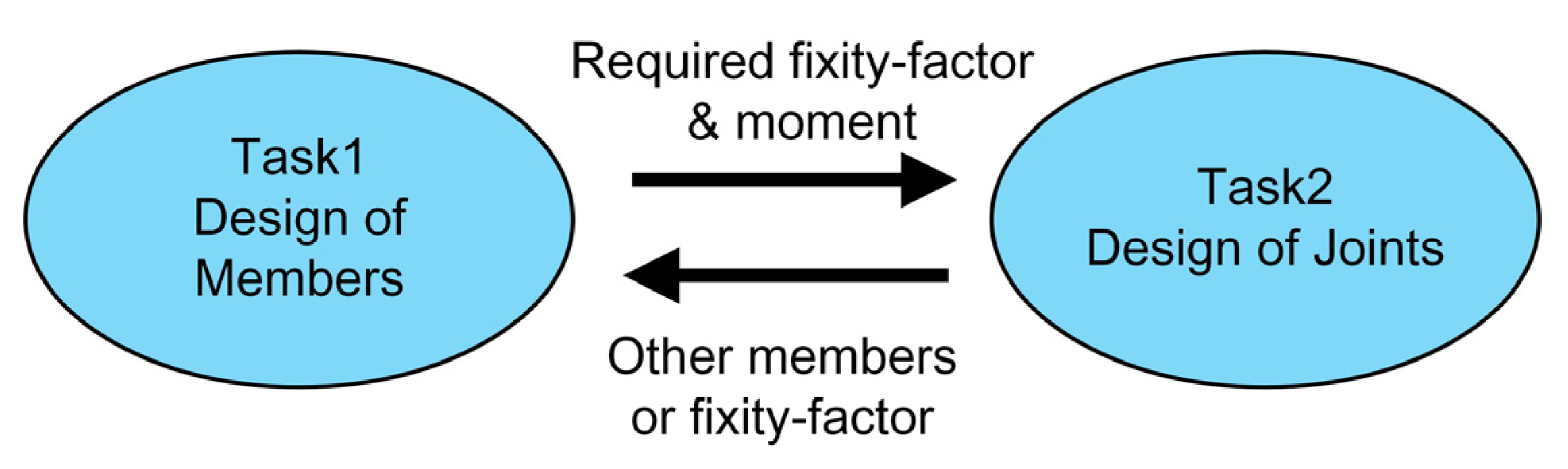
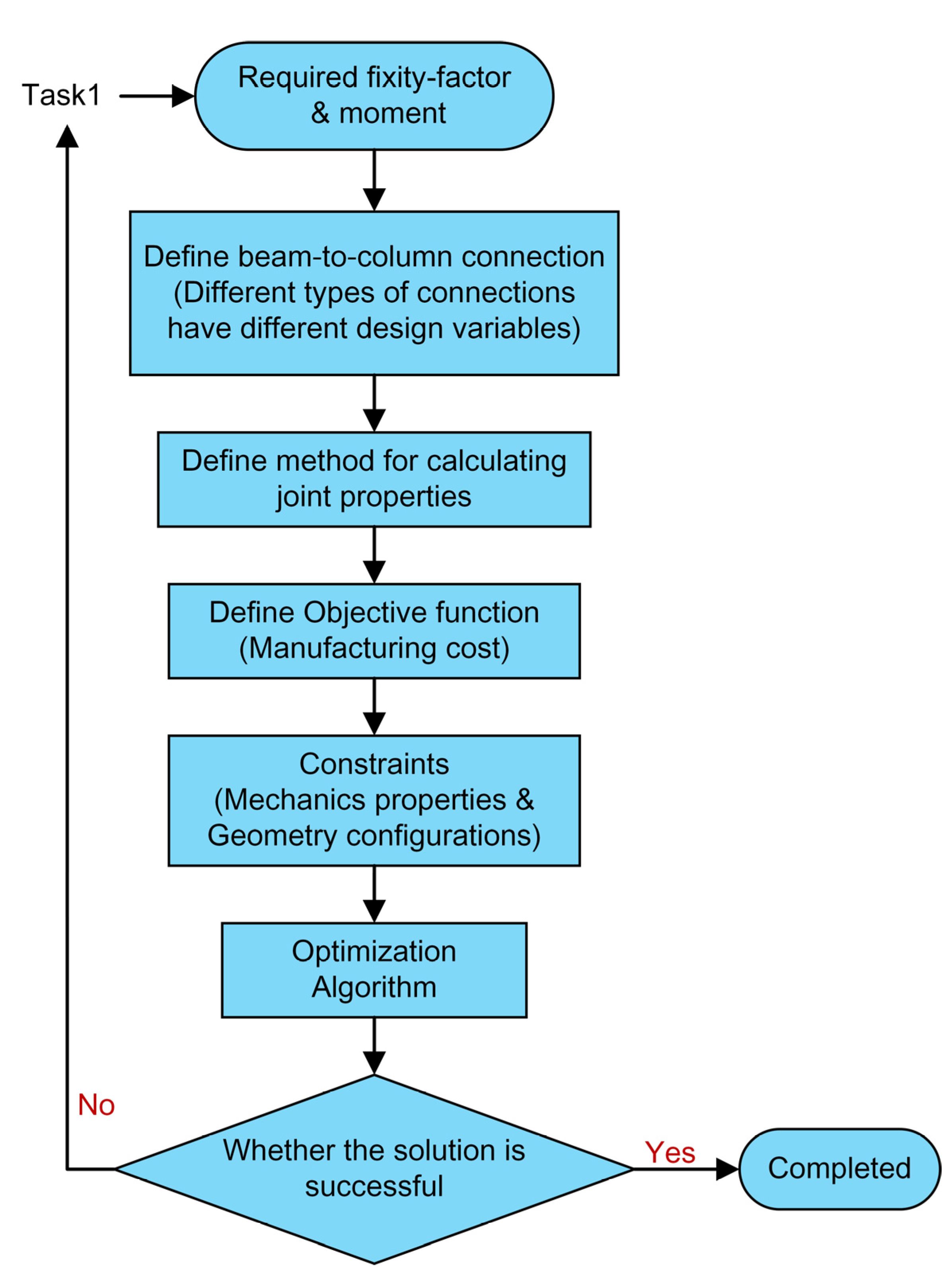
Therefore, an inverse design method has been developed in this paper aimed at addressing the aforementioned drawbacks encountered in the design of semi-rigid steel frames. The core of the approach is to link member design to joint design through joint performance requirements. In the structural analysis phase, both types and details of a joint are ignored, and the assumption that a joint is either pinned or rigid is generalized to a joint with a certain performance value. After completing the member design, a joint can be directly reconstructed by using the optimization algorithm subject to its required performance. This workflow is independent of joint types and can consider all joint parameters completely and implicitly. The innovative use of joint required performance greatly reduces the design variables that engineers need to control compared to geometric parameters, which enables the exploration of more competitive design results. In order to speed up the process of converting to a solution, this study also discusses the selection strategies of the initial value of the required connection stiffness from the characteristics of the connection. At the end of this article, two examples are presented to demonstrate the validity of the proposed method.
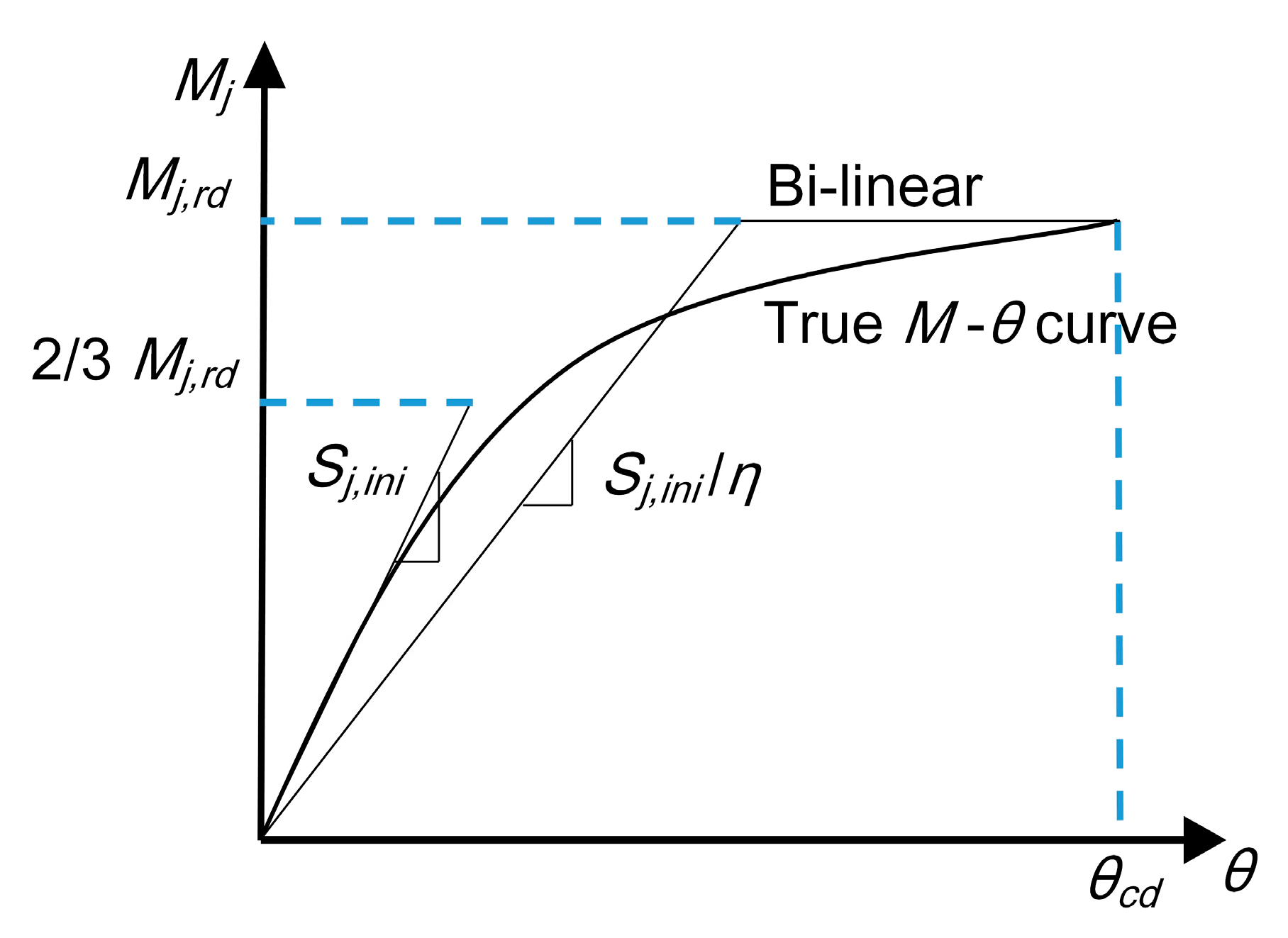
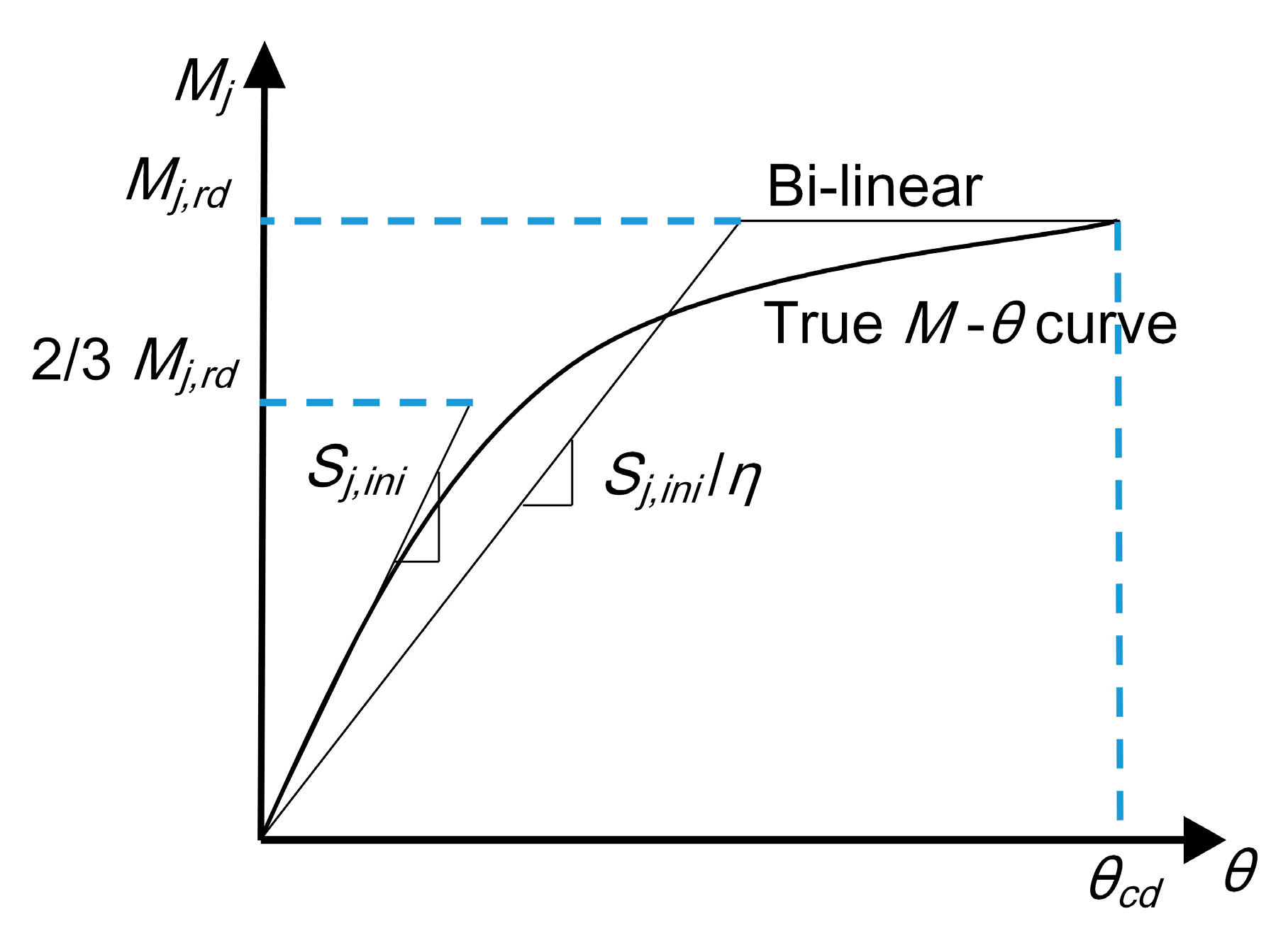
4. Strategies for Selecting Initial Value of the Required Fixity-Factor
Theoretically, the fixity-factor of the connection can be any real number between 0 and 1, but choosing a good anchor point before starting would be beneficial to the design. The literature [
33] used the fixity-factor of 0.66 as the starting point for the optimal design of semi-rigid steel frames, which comes from the conclusion that the most economical profile of the member can be obtained when the maximum moment in the beam equals half of the moment at the mid-span of this beam with two ends pinned [
45]. However, this conclusion is based only on the analysis of isolated beams, without considering their behavior in the structure. Moreover, this method only focuses on the design of beams and does not provide any indication for the detailing of connections. Indeed, sometimes, there may be no available connection configurations for a predetermined end fixity-factor, as will be seen in the following analysis. Therefore, the characteristics of joints themselves should also be considered when determining the appropriate initial value of the fixity-factor.
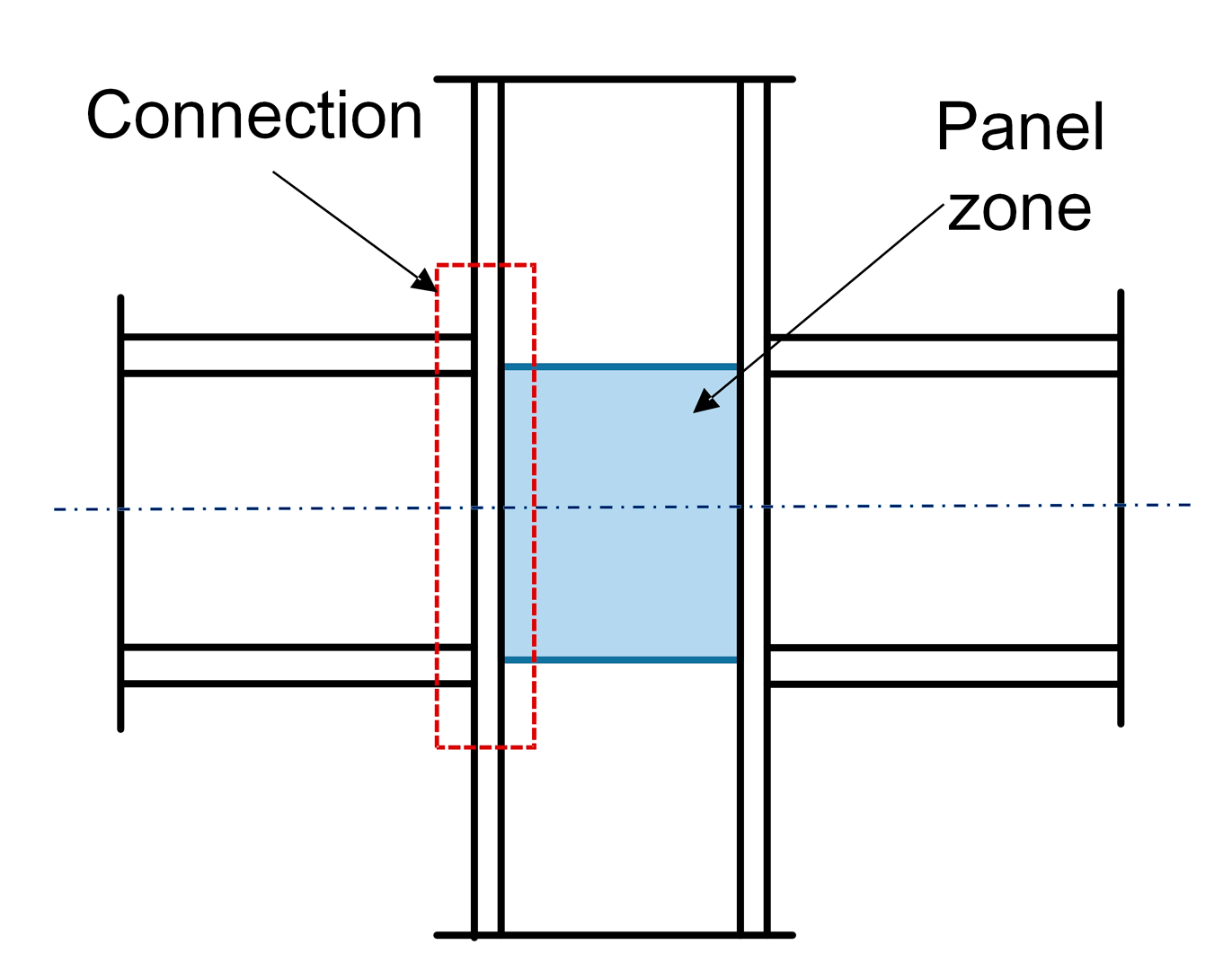
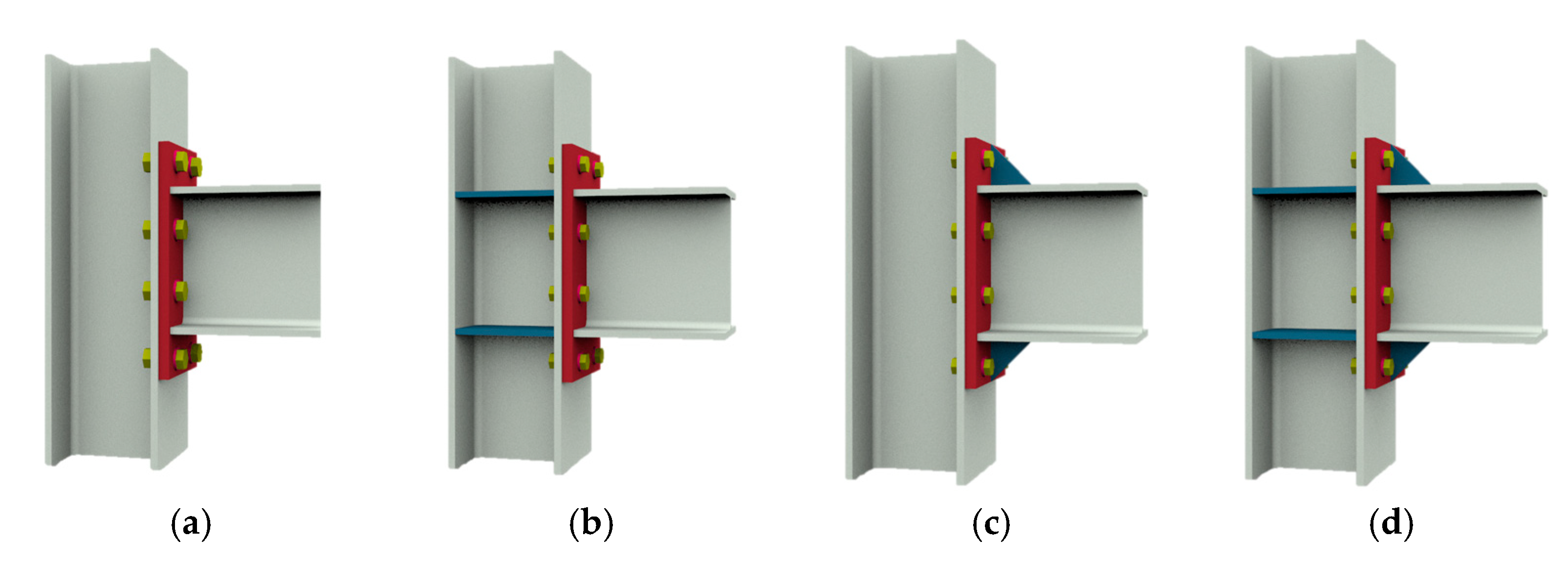
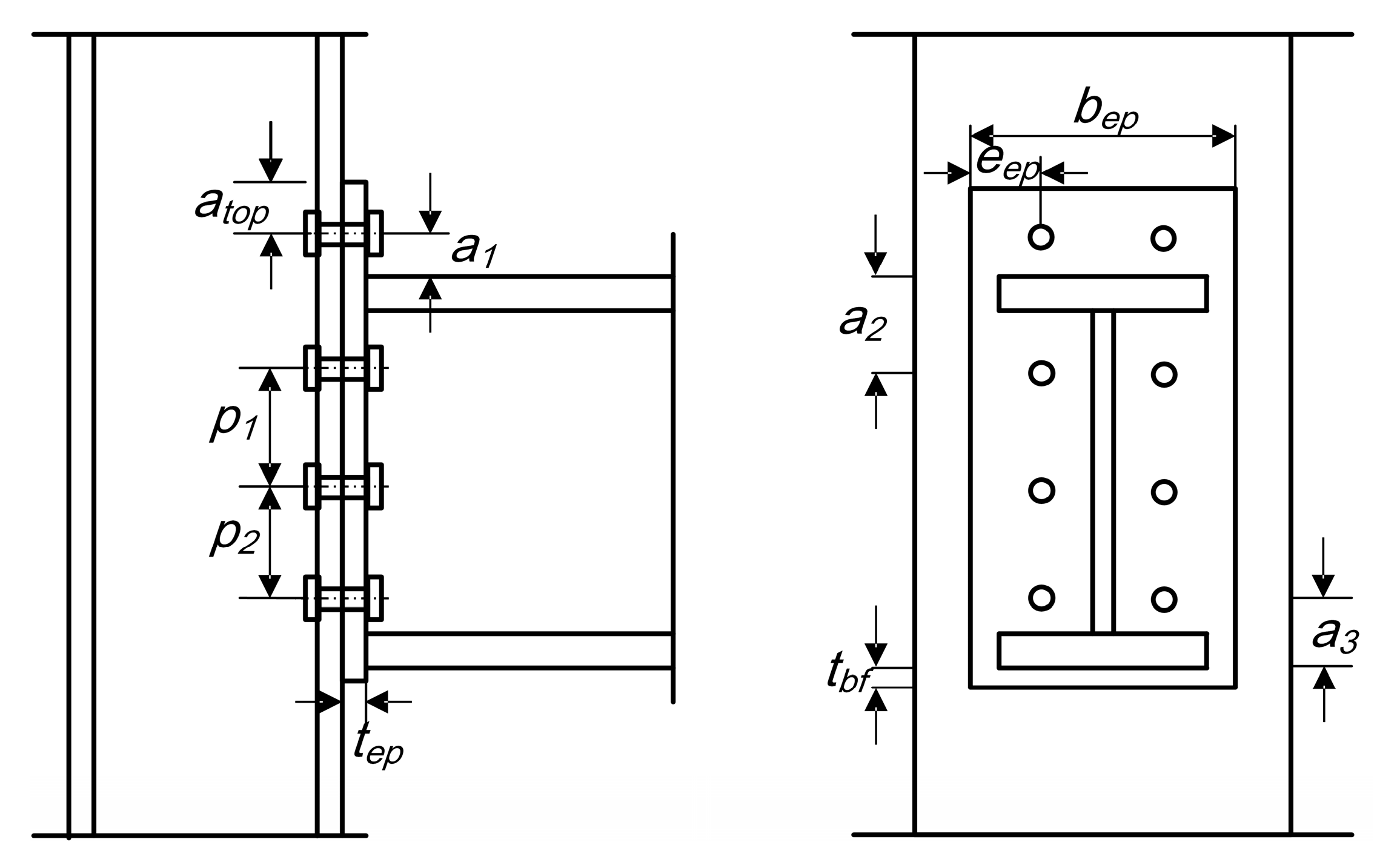
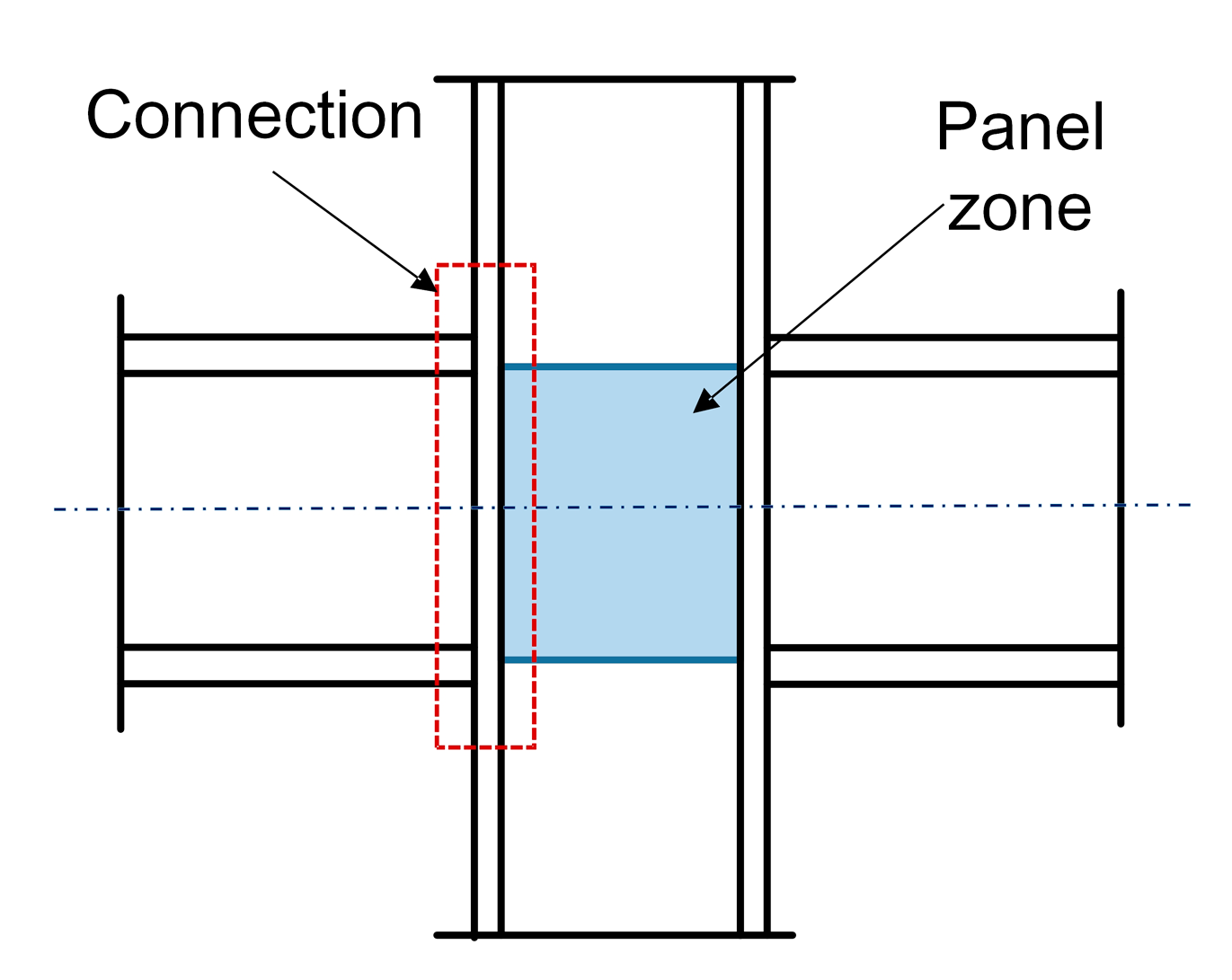
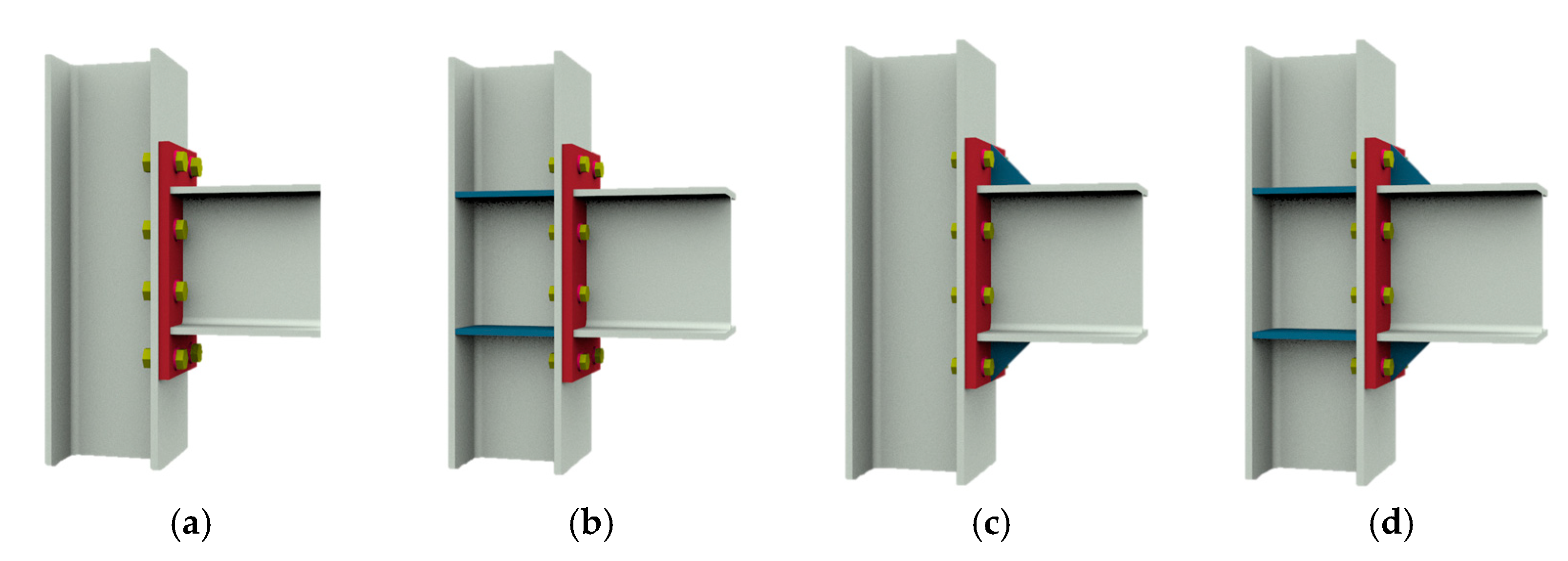
As mentioned in
Section 3.1, the joint in this study is divided into two parts, the web panel and the connection, while the former is related to the profile of the column and its characteristics can be calculated directly if the column is pre-determined. Therefore, only the connection needs to be analyzed. A series of extended end-plate connections for different beam-to-column were analyzed, as listed in
Table 1, including initial rotational stiffness, moment resistance and manufacturing cost. All connections should be constructed in accordance with the requirements of EN1993-1-8 [
23], mainly bolt spacing and edge distance limitations. To avoid weld failure, all welds are full strength. In order to cover as complete a variety of connection types as possible, whether or not to use continuity plates and end-plate ribs has also been considered. The variables of a connection are listed in
Table 2 and the available configurations are displayed in
Figure 8.
Table 1.
Pairs of beam–column.
Table 1.
Pairs of beam–column.
| No. | Column 1 | Beam 1 |
|---|
| 1 | HE100B | IPE100 |
| 2 | HE100B | IPE120 |
| … | … | … |
| 285 | HE500B | IPE400 |
| 286 | HE500B | IPE450 |
| … | … | … |
| 407 | HE1000B | IPE550 |
| 408 | HE1000B | IPE600 |
Table 2.
Variables of a connection.
Table 2.
Variables of a connection.
| Project | Available |
|---|
| Plate thickness (mm) | 10, 12, 14, 16, 20, 25 |
| Steel grade 1 | S275 (nominal yield strength of 275 Mpa) |
| Bolt thread d 2 | M16, M20, M24, M30 |
| Bolt class 3 | 8.8, 10.9 |
| Rows of bolts 4 | |
| Edge distance 5 | |
| Bolt spacing | |
| Assembly space | |
| Continuity plates 6 | Yes or No |
| Extended end-plate ribs 7 | Yes or No |
The analysis steps are as follows: Step 1: Initialize the list of available plate thickness, bolt sizes and bolt grades. Step 2: Select one pair of beam–column from
Table 1. Step 3: Generate a mass of configurations with geometric constraints by sampling all design variables in
Table 2 randomly. Most pairs of beam–column can have at least 3000 sets of valid data, with the expectation of a few that have fewer due to their section size limitations. Step 4: Calculate the initial rotational stiffness, flexural capacity and fabrication cost of all connections. Step 5: Go back to Step 2 and select the next pair of beam–column until all data in
Table 1 are iterated.
Due to a large number of beam–column pairs in
Table 1, it is impossible to display all data. Only the six sets of data in
Table 3 are presented to illustrate the analytical procedure. According to
Section 2.2.1, the stiffness and moment capacity of the connection are converted into the fixity-factor and moment capacity coefficient, and the beam length is assumed to be 6 m. It is noted that this assumption will not affect the applicability of the conclusion, since the two connection properties analyzed here are relative values.
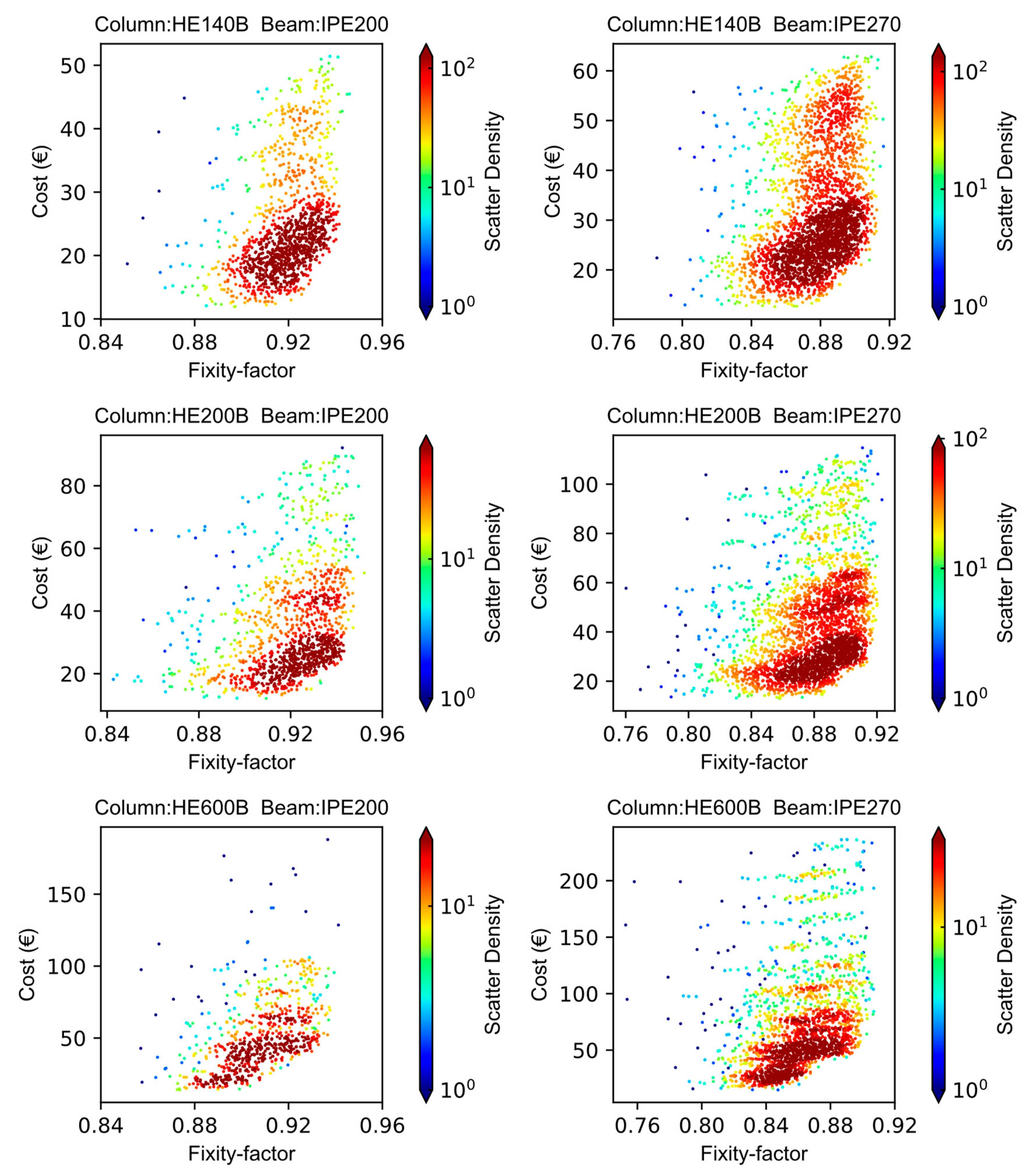
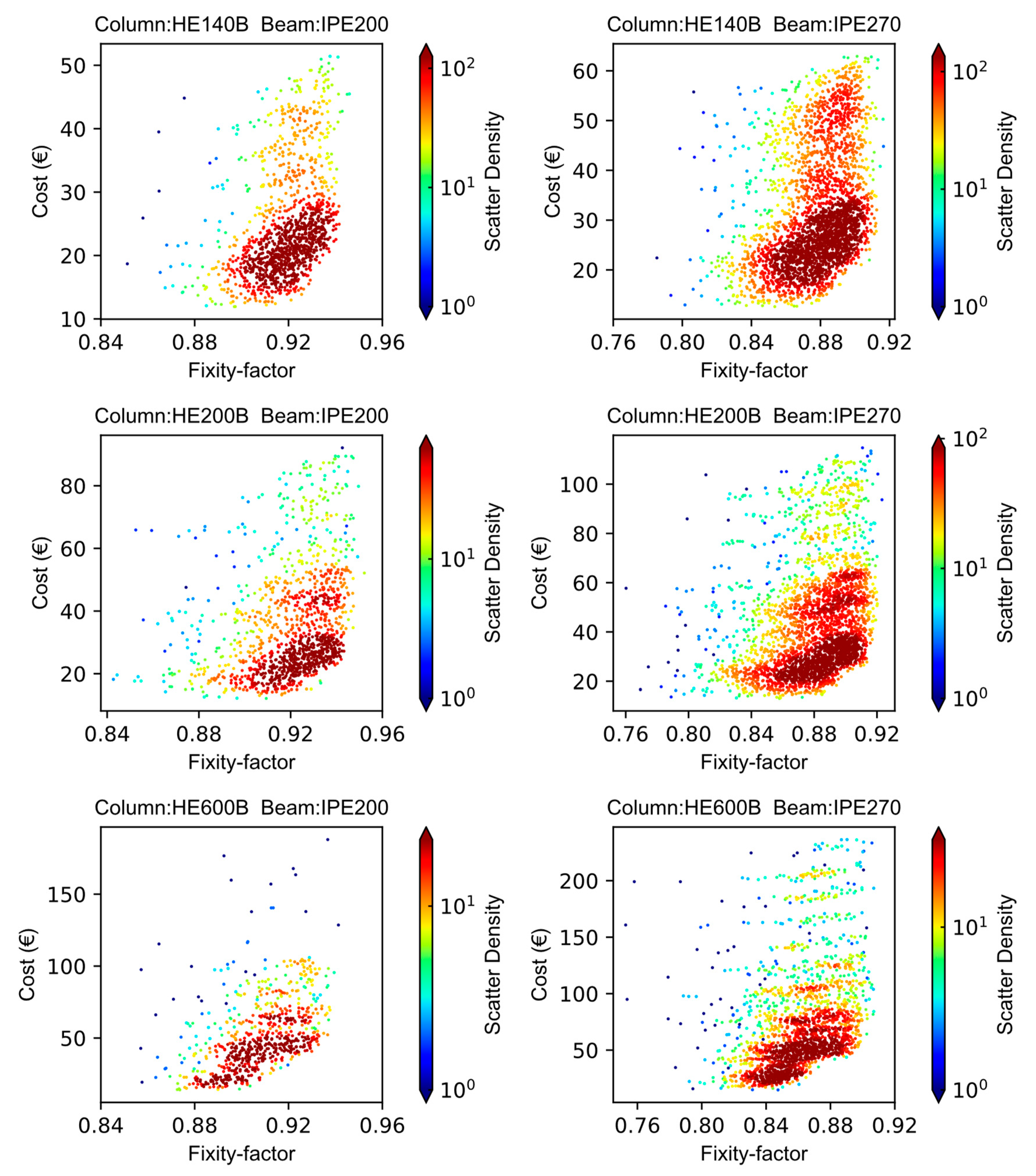
4.1. End Fixity-Factor vs. Moment Capacity Coefficient
The scatter density diagrams of fixity-factor vs. moment capacity coefficient are shown in
Figure 9. Each point represents available joint details. The color band in the figure is used to mark the density of samples. Red indicates a higher number of valid configurations, while blue indicates a lower number.
In general, the rotational stiffness of a connection is positively correlated with its flexural capacity. That is, a connection with high rotational stiffness is often accompanied by a high flexural capacity. However, the relationship between them cannot be expressed in a simple function, because there is a range of moment capacity coefficient for a fixity-factor and vice versa, as can be seen in
Figure 9. It can also be found that the connections under each pair of beam–column have their own applicable range of flexural capacity and fixity-factor range, which vary greatly. When the beam section is fixed, the upper limit of the flexural capacity of the joint increases with the increase in the column section. This is because the larger column section has thicker flanges that provide greater moment resistance. On the other hand, as the column section increases, the end-plate will have more room to accommodate larger bolts, conversely, the smaller column limits the maximum available diameter of the bolt.
The applicable boundaries regarding the rotational stiffness and moment capacity of semi-rigid connections would lead to a problem encountered in the design of semi-rigid steel frames. That is, there is no guarantee that available connection configurations would exist for any performance requirement. For example, when the required fixity-factor is 0.7, no connection configuration is available for those beam–column pairs in
Figure 9, no matter how small the moment that is required. This is exactly the difference between semi-rigid connection and traditional connection, and the difficulty.
Another phenomenon is that the distribution density of scattered points varies from place to place, with a maximum variation that can be nearly two orders of magnitude. Moreover, all figures show that the density of valid configurations near the lower boundaries is sparse.
4.2. End Fixity-Factor vs. Manufacturing Cost
Figure 10 shows the scatter density diagrams of fixity-factor vs. manufacturing cost. There is a wide range of costs for any fixity-factor, with the highest being several times higher than the lowest. It is reasonable to choose a joint configuration that locates the periphery near the bottom of the longitudinal axis, as it is less expensive. Each set of data shows that the lowest cost is relatively stable within the first half of the fixity-factor range, exceeding this when the cost begins to increase significantly. Therefore, the selection of the joints should give priority to this region.
4.3. Recommendations
From the above discussion, it can be concluded that a good initial value of the required fixity-factor should meet the following conditions: (1) In the dense region of available configurations to increase the probability of a successful search; (2) In the region with less cost variation to obtain more economical results. Reasonably, the recommended starting value should be the intermediate value of the range regarding each beam–column, see
Appendix A for more results.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}