
Bibliometric Analysis and Review of Deep Learning-Based Crack Detection Literature Published between 2010 and 2022

 , , , and
, , , and
Abstract
:1. Introduction
- The article performs bibliometric analysis and a comprehensive review of the most recent research articles from the last 11 years.
- In the comprehensive review, the relative finding of the latest studies in DL-based crack detection is explained, and analysis is performed based on various factors, such as the studied domain, deep learning architecture, architecture performance, and datasets used.
- The paper provides an overview of DL-based crack detection approaches and categorizes them to simplify the current literature for better understanding and better analysis of trends, gaps, and challenges in the field. The paper also provides future directions to the readers to address the current challenges. The articles can be used as a reference that will work for the researchers working in the field.
Research Questions
- Which datasets have been used for crack detection?
- What is the impact of dataset characteristics on classification performance?
- What are the different application domains in crack detection?
- Which deep learning algorithms have been used for crack detection?
- What are the gaps and challenges of deep learning for crack detection?
- What are the future research opportunities?
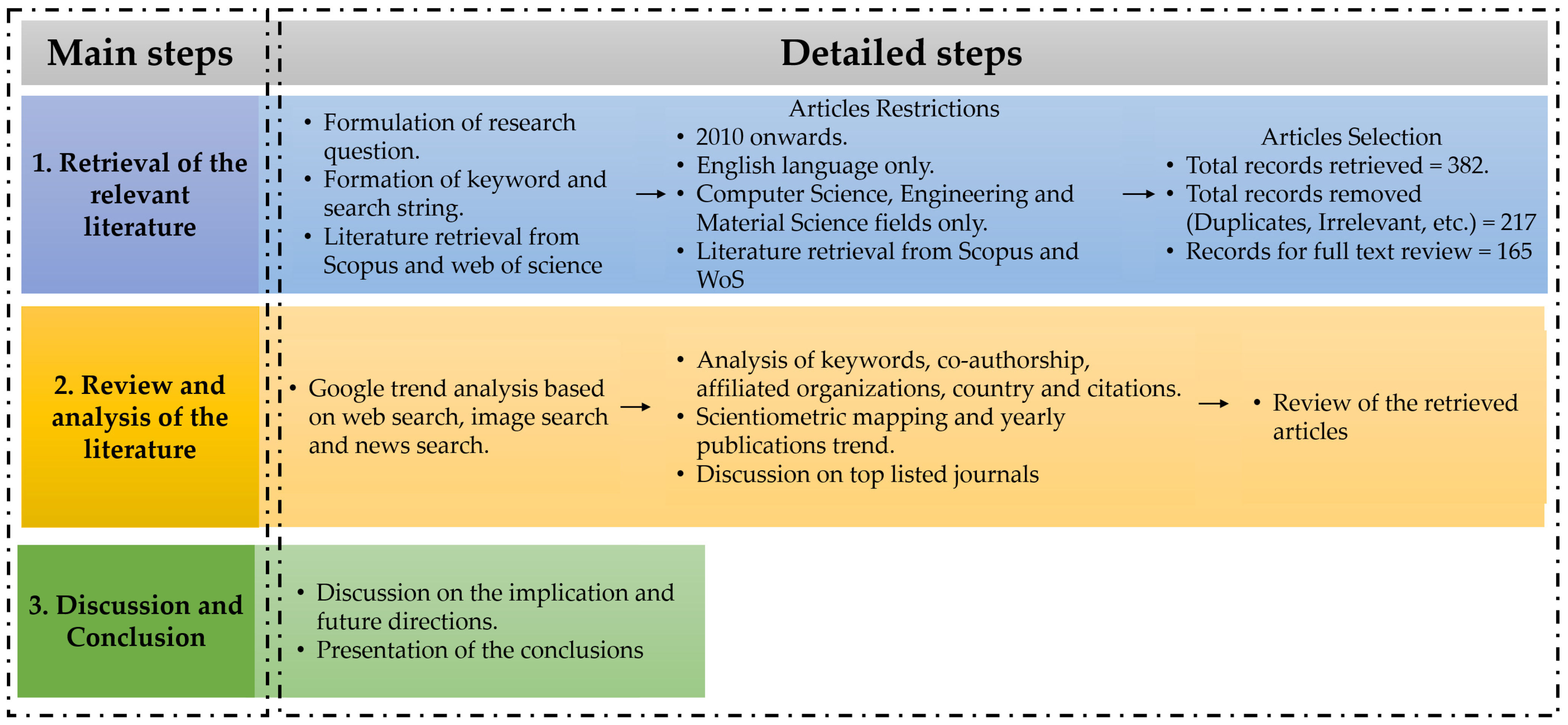
2. Materials and Methods
- Retrieval of relevant literature.
- Review and analysis of the retrieved literature.
- Discussion and conclusion.
Literature Retrieval
3. Bibliometric Analysis of the Retrieved Literature
3.1. Google Trends Analysis
3.2. Literature Synthesis
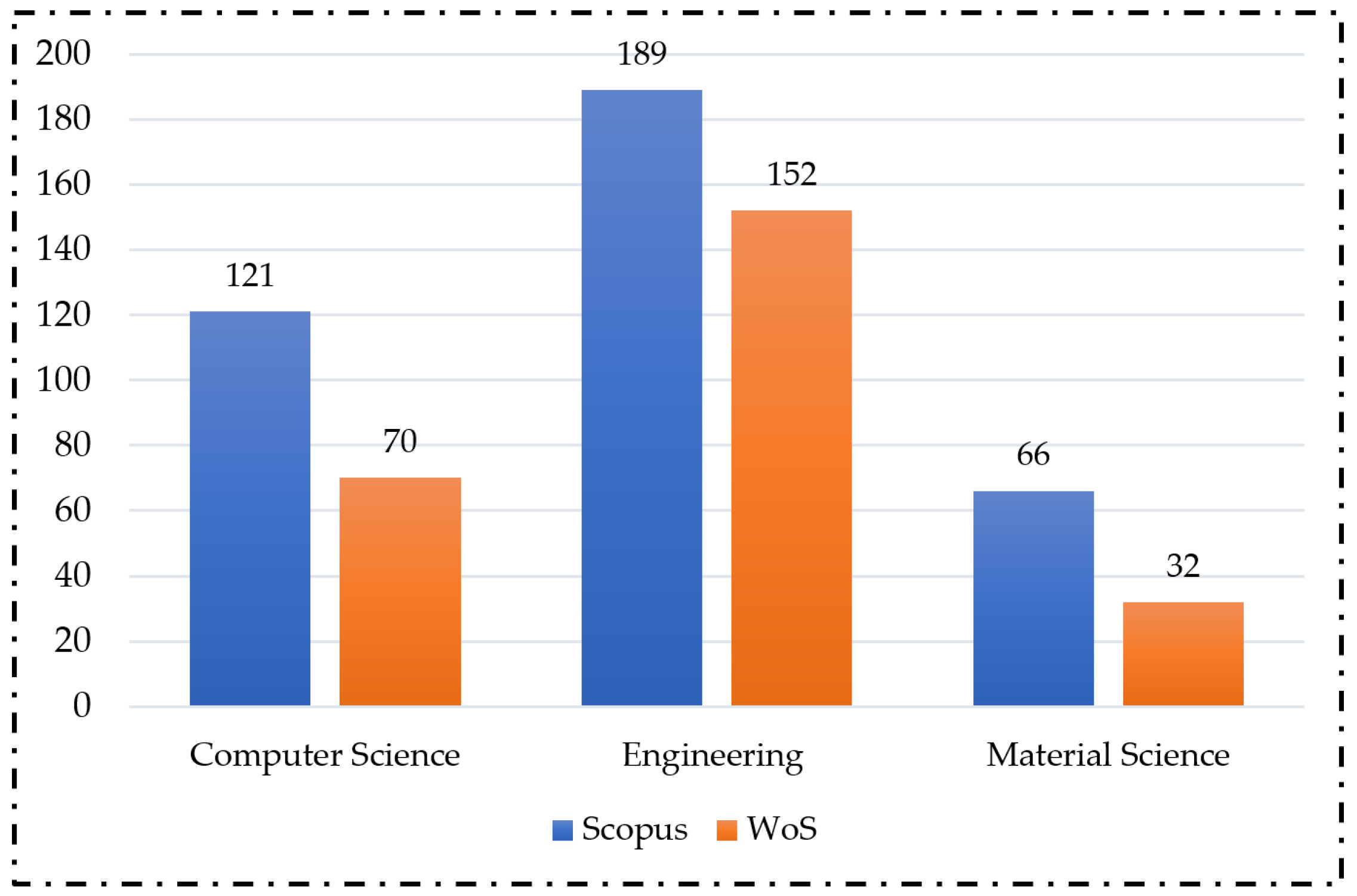
3.2.1. Retrieved Articles Classification
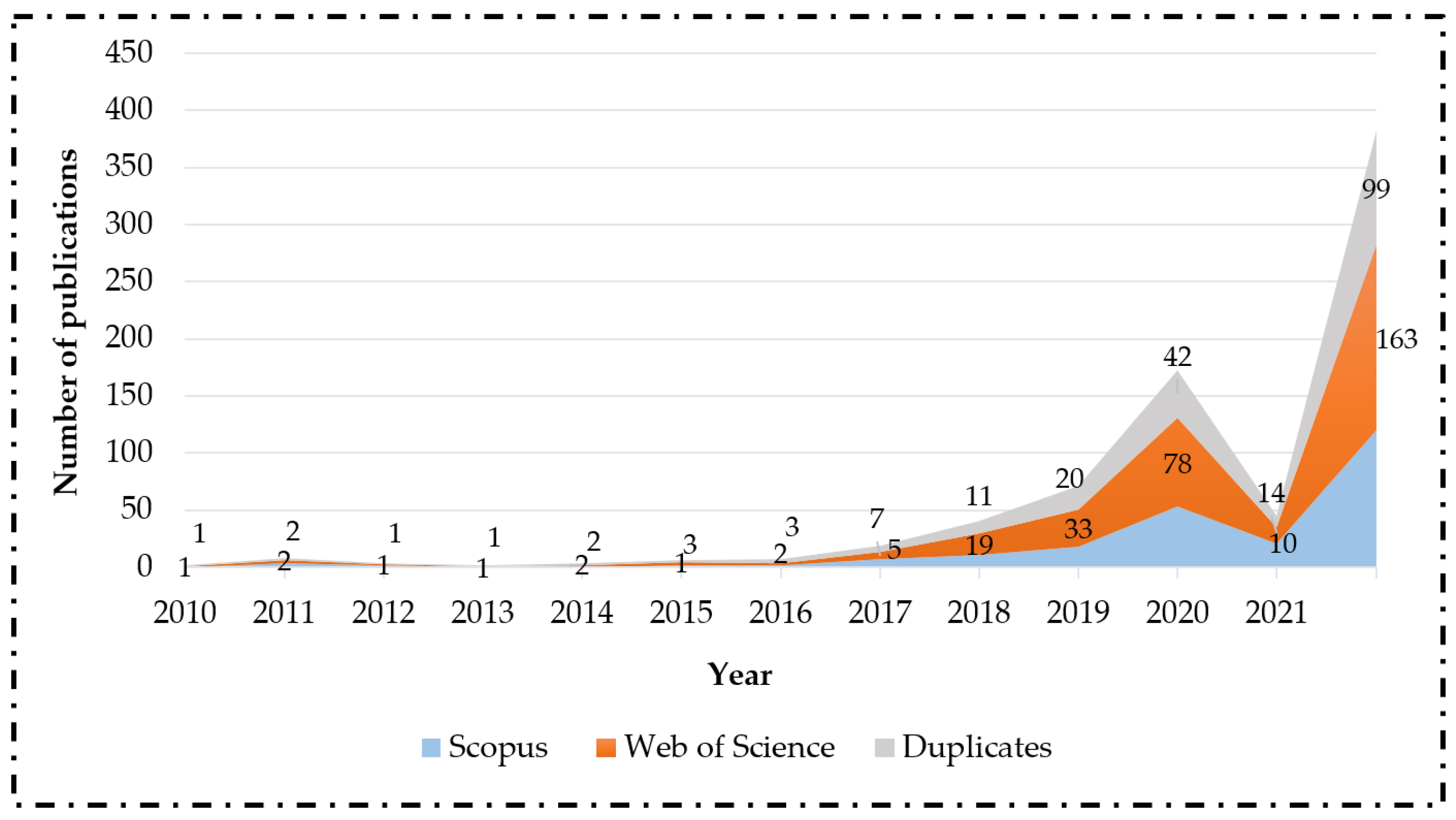
3.2.2. Publication Trend (Yearly)
3.2.3. Article Types
3.2.4. Top Sources
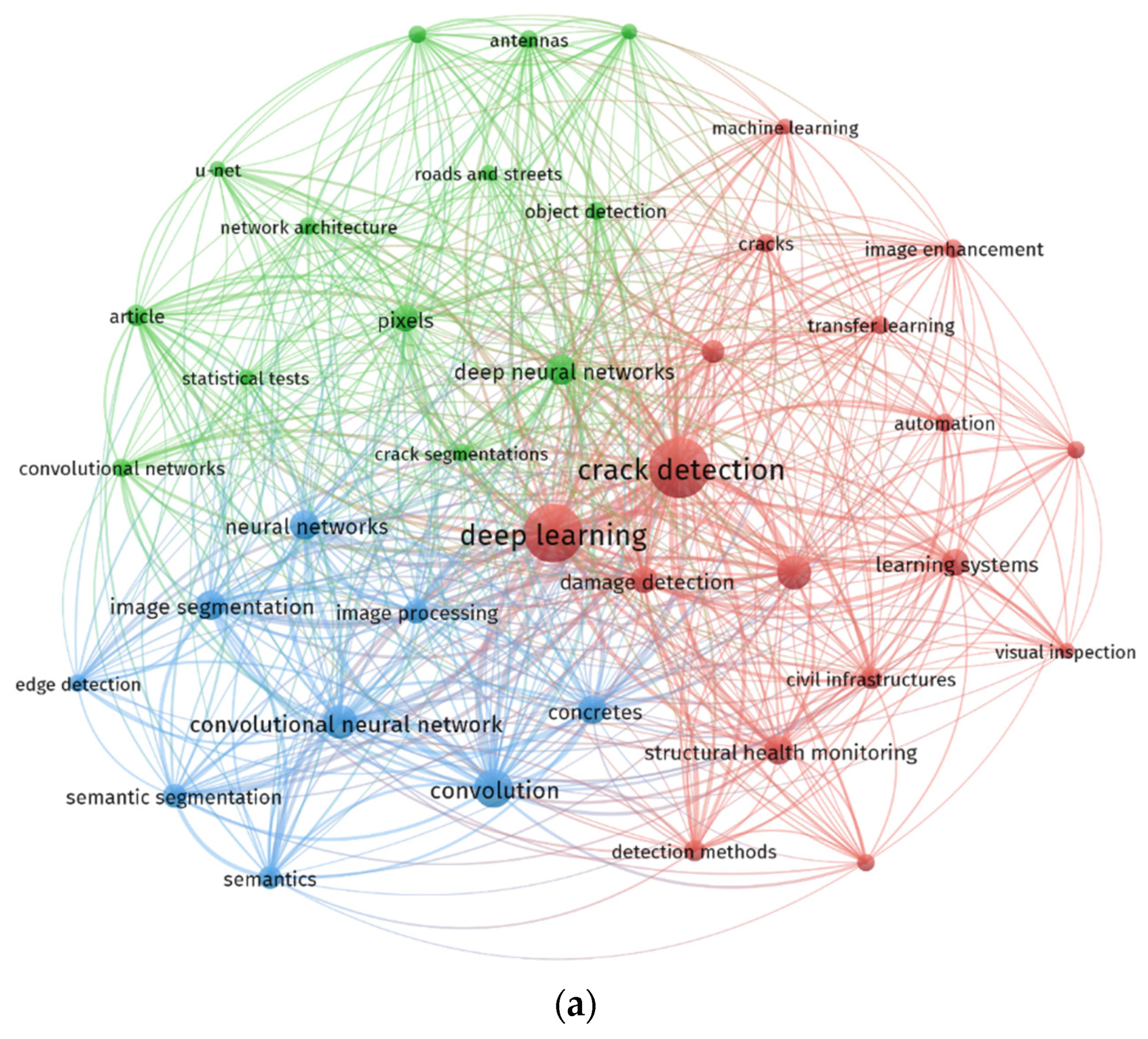
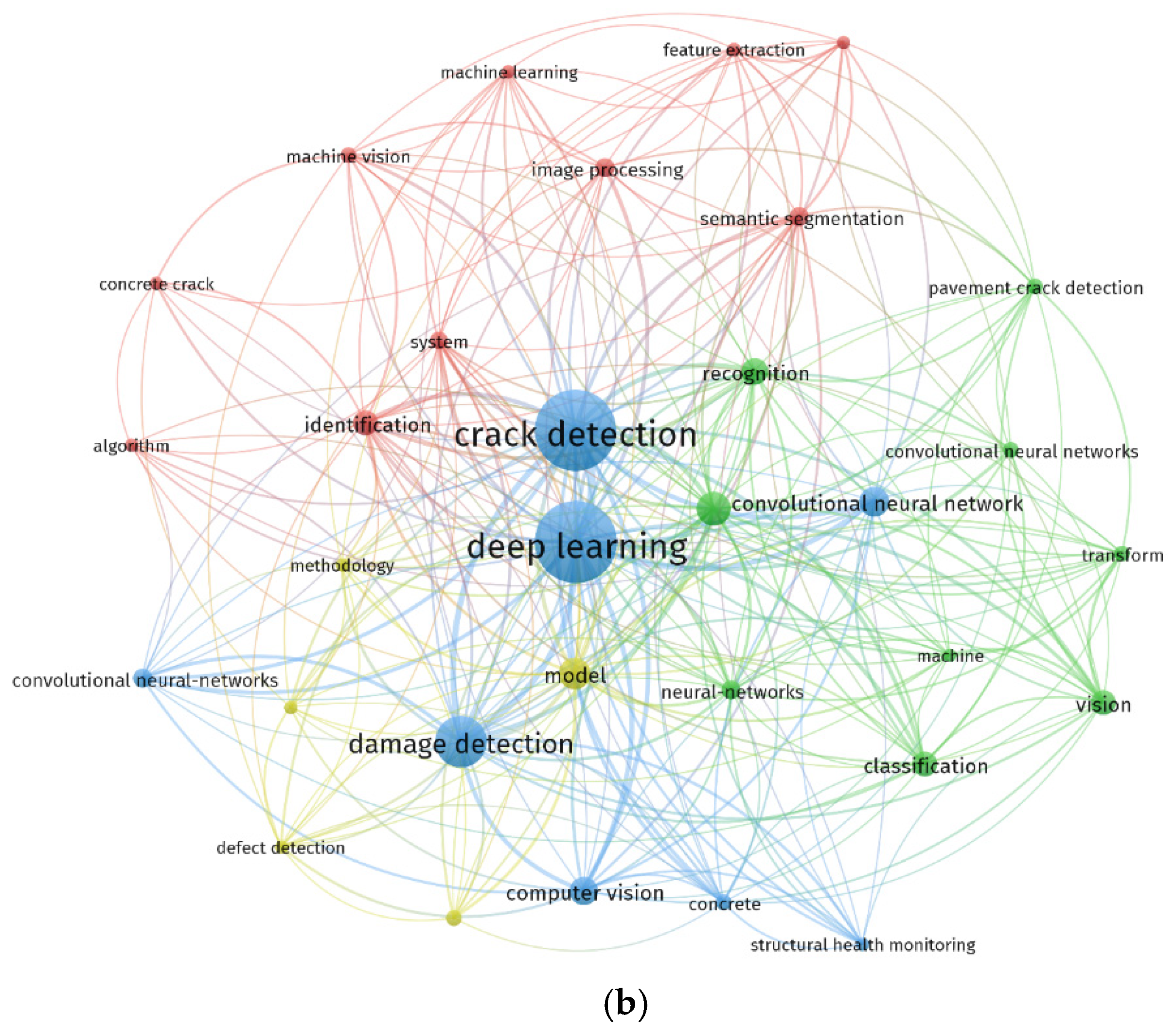
3.2.5. Keyword Analysis and Scientometric Mapping
3.2.6. Co-Authorship Analysis
3.2.7. Organizational Affiliation Analysis
3.2.8. Origin Country of the Articles and Citation Analysis
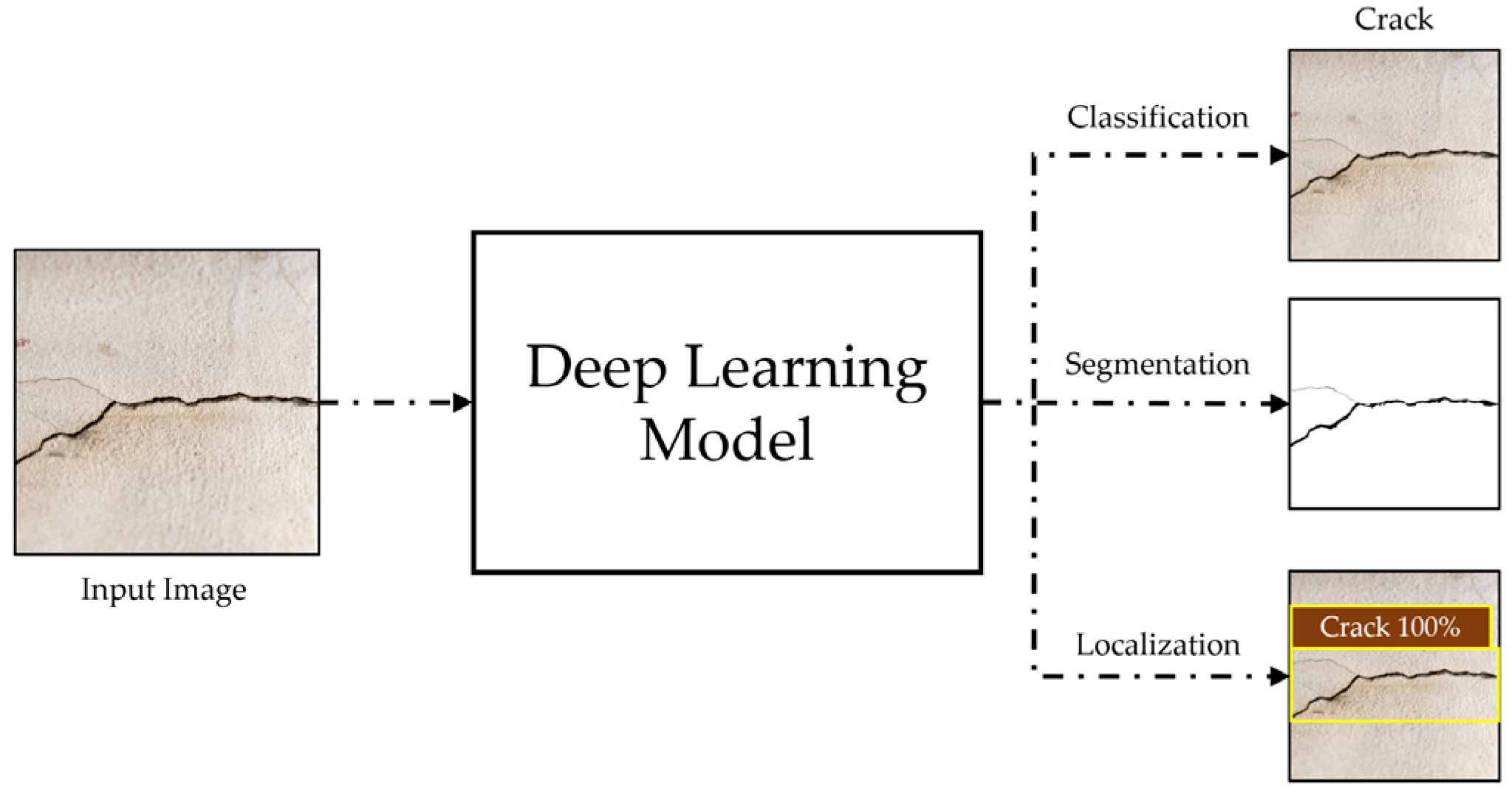
4. DL Based Crack Detection Approaches
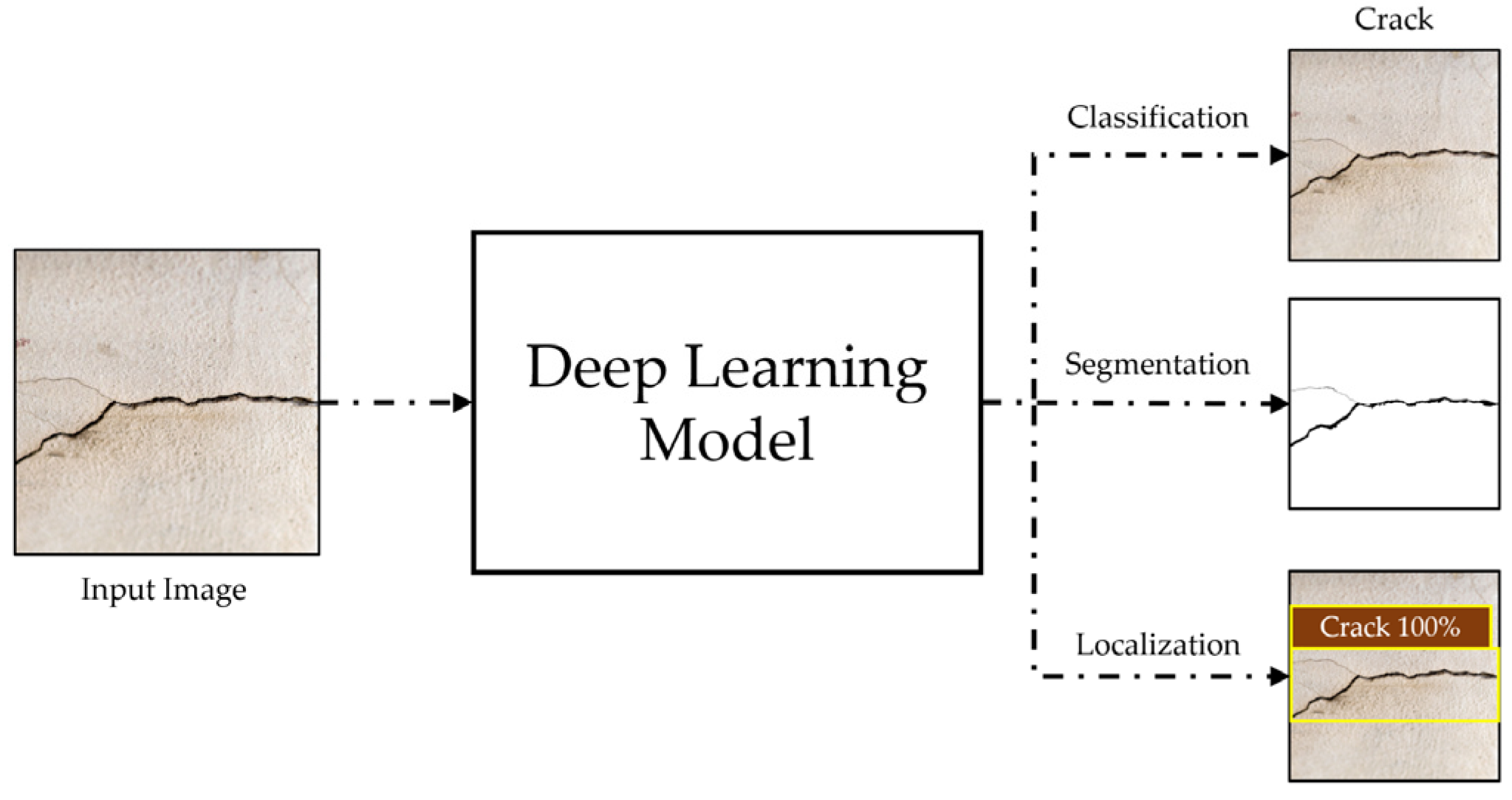
4.1. Crack Detection Using DL Based on Classification and Localization Algorithms
4.1.1. DCNN and Pretrained Approaches
4.1.2. Modified CNN Architecture
4.1.3. CNN Integrated with Other Modules
4.1.4. Object Detection Models
4.2. DL Based Segmentation Algorithms
5. Analysis and Discussion
5.1. Dataset Based Analysis
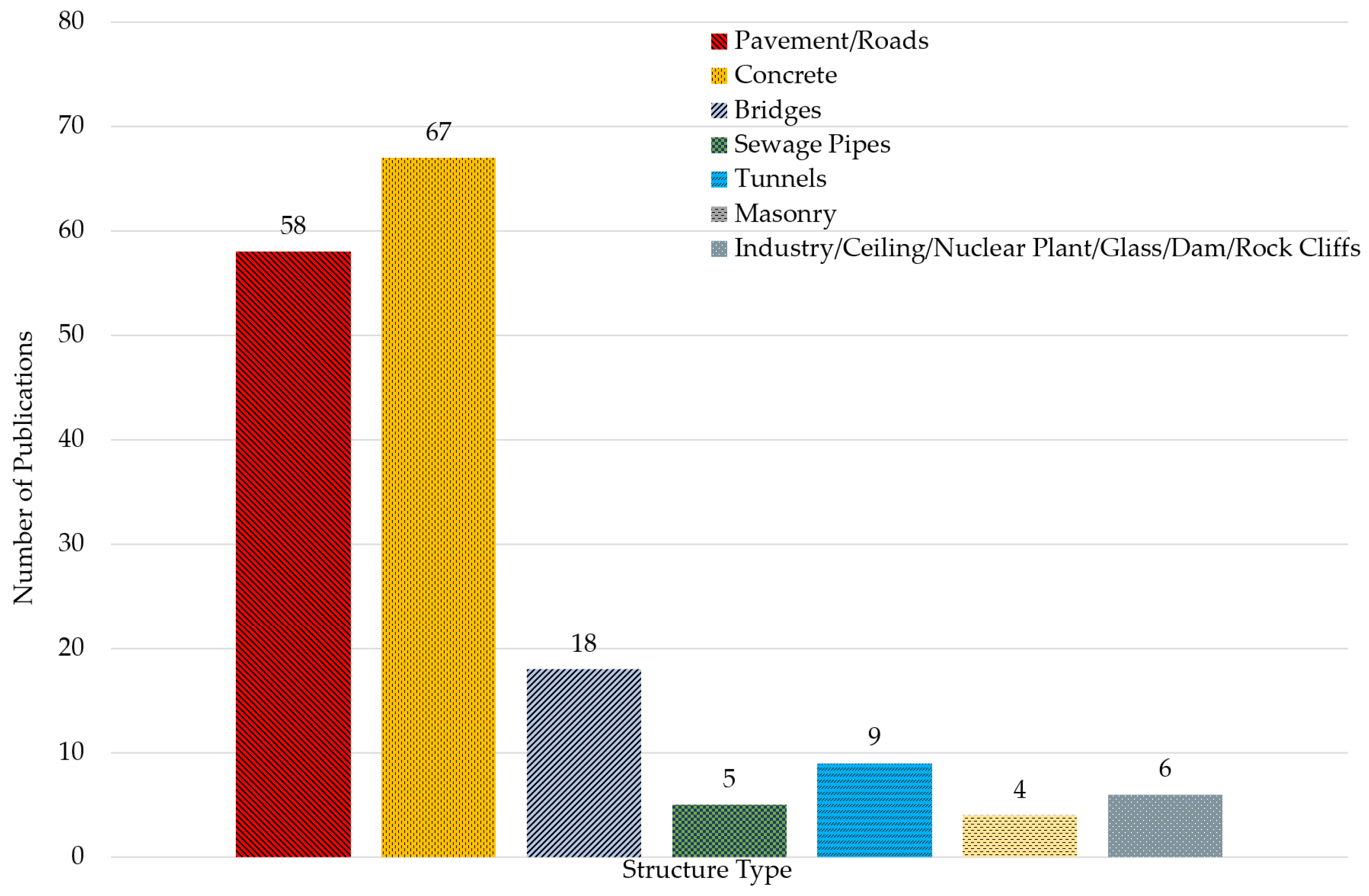
5.2. Domain-Based Analysis
5.3. Architecture Based Analysis
5.4. Precision Based Analysis
6. Gaps, Challenges, and Future Research Opportunities
6.1. Automatic Recognition of Crack Type and Severity
6.2. Dataset Availability and Suitability
6.3. Efficient Data Preprocessing Techniques
6.4. Automatic Labelling Approaches for Crack Detection
6.5. Parameter Tuning and Optimization
6.6. Integrating New Features beyond RGB Images
6.7. Realtime Crack Detection
6.8. Improving the Pixel Level Segmentation Accuracy
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ali, L.; Alnajjar, F.; Jassmi, H.A.; Gocho, M.; Khan, W.; Serhani, M.A. Performance Evaluation of Deep CNN-Based Crack Detection and Localization Techniques for Concrete Structures. Sensors 2021, 21, 1688. [Google Scholar] [CrossRef] [PubMed]
- Ali, L.; Sallabi, F.; Khan, W.; Alnajjar, F.; Aljassmi, H. A Deep Learning-Based Multi-Model Ensemble Method for Crack Detection in Concrete Structures. In Proceedings of the 38th International Symposium on Automation and Robotics in Construction (ISARC), Dubai, United Arab Emirates, 2 November 2021. [Google Scholar]
- Spencer, B.F.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 5, 199–222. [Google Scholar] [CrossRef]
- Zou, Q.; Cao, Y.; Li, Q.; Mao, Q.; Wang, S. CrackTree: Automatic Crack Detection from Pavement Images. Pattern Recognit. Lett. 2012, 33, 227–238. [Google Scholar] [CrossRef]
- Munawar, H.S.; Hammad, A.W.A.; Haddad, A.; Soares, C.A.P.; Waller, S.T. Image-Based Crack Detection Methods: A Review. Infrastructures 2021, 6, 115. [Google Scholar] [CrossRef]
- Abdel-Qader, I.; Abudayyeh, O.; Kelly, M.E. Analysis of Edge-Detection Techniques for Crack Identification in Bridges. J. Comput. Civ. Eng. 2003, 17, 255–263. [Google Scholar] [CrossRef]
- Kamaliardakani, M.; Sun, L.; Ardakani, M.K. Sealed-Crack Detection Algorithm Using Heuristic Thresholding Approach. J. Comput. Civ. Eng. 2016, 30, 04014110. [Google Scholar] [CrossRef]
- Li, Q.; Zou, Q.; Zhang, D.; Mao, Q. FoSA: F* Seed-Growing Approach for Crack-Line Detection from Pavement Images. Image Vis. Comput. 2011, 29, 861–872. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Nakamura, S.; Hashimoto, S. An Efficient Crack Detection Method Using Percolation-Based Image Processing. In Proceedings of the 2008 3rd IEEE Conference on Industrial Electronics and Applications, Singapore, 3–5 June 2008; pp. 1875–1880. [Google Scholar]
- Sinha, S.K.; Fieguth, P.W. Morphological Segmentation and Classification of Underground Pipe Images. Mach. Vis. Appl. 2006, 17, 21. [Google Scholar] [CrossRef]
- Sinha, S.K.; Fieguth, P.W. Automated Detection of Cracks in Buried Concrete Pipe Images. Autom. Constr. 2006, 15, 58–72. [Google Scholar] [CrossRef]
- Chambon, S.; Subirats, P.; Dumoulin, J. Introduction of a Wavelet Transform Based on 2D Matched Filter in a Markov Random Field for Fine Structure Extraction: Application on Road Crack Detection. In Proceedings of the Image Processing: Machine Vision Applications II, Bellingham, WA, USA, 2 February 2009; Volume 7251, pp. 87–98. [Google Scholar]
- Fujita, Y.; Hamamoto, Y. A Robust Automatic Crack Detection Method from Noisy Concrete Surfaces. Mach. Vis. Appl. 2011, 22, 245–254. [Google Scholar] [CrossRef]
- Roychowdhury, S.; Diligenti, M.; Gori, M. Regularizing Deep Networks with Prior Knowledge: A Constraint-Based Approach. Knowl. Based Syst. 2021, 222, 106989. [Google Scholar] [CrossRef]
- Gomes, G.F.; Mendéz, Y.A.D.; da Silva Lopes Alexandrino, P.; da Cunha, S.S.; Ancelotti, A.C. The Use of Intelligent Computational Tools for Damage Detection and Identification with an Emphasis on Composites—A Review. Compos. Struct. 2018, 196, 44–54. [Google Scholar] [CrossRef]
- Sarker, I.H. Deep Learning: A Comprehensive Overview on Techniques, Taxonomy, Applications and Research Directions. Sn Comput. Sci. 2021, 2, 420. [Google Scholar] [CrossRef]
- Sony, S.; Dunphy, K.; Sadhu, A.; Capretz, M. A Systematic Review of Convolutional Neural Network-Based Structural Condition Assessment Techniques. Eng. Struct. 2021, 226, 111347. [Google Scholar] [CrossRef]
- Elghaish, F.; Matarneh, S.T.; Talebi, S.; Abu-Samra, S.; Salimi, G.; Rausch, C. Deep Learning for Detecting Distresses in Buildings and Pavements: A Critical Gap Analysis. Constr. Innov. 2021. [Google Scholar] [CrossRef]
- Khallaf, R.; Khallaf, M. Classification and Analysis of Deep Learning Applications in Construction: A Systematic Literature Review. Autom. Constr. 2021, 129, 103760. [Google Scholar] [CrossRef]
- Modarres, C.; Astorga, N.; Droguett, E.L.; Meruane, V. Convolutional Neural Networks for Automated Damage Recognition and Damage Type Identification. Struct. Control. Health Monit. 2018, 25, e2230. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. Comparison of Deep Convolutional Neural Networks and Edge Detectors for Image-Based Crack Detection in Concrete. Constr. Build. Mater. 2018, 186, 1031–1045. [Google Scholar] [CrossRef]
- Cha, Y.-J.; Choi, W.; Büyüköztürk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Gopalakrishnan, K.; Khaitan, S.K.; Choudhary, A.; Agrawal, A. Deep Convolutional Neural Networks with Transfer Learning for Computer Vision-Based Data-Driven Pavement Distress Detection. Constr. Build. Mater. 2017, 157, 322–330. [Google Scholar] [CrossRef]
- Aliyari, M.; Droguett, E.L.; Ayele, Y.Z. UAV-Based Bridge Inspection via Transfer Learning. Sustainability 2021, 13, 11359. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-Scale Image Recognition. In Proceedings of the International Conference on Learning Representations (ICLR), San Diego, CA, USA, 7–9 May 2015; pp. 1–14. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016. [Google Scholar]
- Chollet, F. Xception: Deep learning with depthwise separable convolutions. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Huang, G.; Liu, Z.; van der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997. [Google Scholar]
- Zoph, B.; Vasudevan, V.; Shlens, J.; Le, Q. Learning Transferable Architectures for Scalable Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 8697–8710. [Google Scholar]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. arXiv 2019, arXiv:1905.11946. [Google Scholar]
- Pozzer, S.; Rezazadeh Azar, E.; Dalla Rosa, F.; Chamberlain Pravia, Z.M. Semantic Segmentation of Defects in Infrared Thermographic Images of Highly Damaged Concrete Structures. J. Perform. Constr. Facil. 2021, 35, 04020131. [Google Scholar] [CrossRef]
- Yang, C.; Chen, J.; Li, Z.; Huang, Y. Structural Crack Detection and Recognition Based on Deep Learning. Appl. Sci. 2021, 11, 2868. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-Based Learning Applied to Document Recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Qu, Z.; Mei, J.; Liu, L.; Zhou, D.-Y. Crack Detection of Concrete Pavement With Cross-Entropy Loss Function and Improved VGG16 Network Model. IEEE Access 2020, 8, 54564–54573. [Google Scholar] [CrossRef]
- Żarski, M.; Wójcik, B.; Miszczak, J.A. KrakN: Transfer Learning Framework and Dataset for Infrastructure Thin Crack Detection. SoftwareX 2021, 16, 100893. [Google Scholar] [CrossRef]
- An, Y.-K.; Jang, K.; Kim, B.; Cho, S. Deep Learning-Based Concrete Crack Detection Using Hybrid Images. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2018, Denver, CO, USA, 27 March 2018; Volume 10598, pp. 273–284. [Google Scholar]
- Jang, K.; Kim, N.; An, Y.-K. Deep Learning–Based Autonomous Concrete Crack Evaluation through Hybrid Image Scanning. Struct. Health Monit. 2019, 18, 1722–1737. [Google Scholar] [CrossRef]
- Panella, F.; Boehm, J.; Loo, Y.; Kaushik, A.; Gonzalez, D. Deep Learning and Image Processing for Automated Crack Detection and Defect Measurement in Underground Structures. 2018. Available online: https://doi.org/10.5194/isprs-archives-XLII-2-829-2018 (accessed on 10 November 2021).
- Rao, A.S.; Nguyen, T.; Palaniswami, M.; Ngo, T. Vision-Based Automated Crack Detection Using Convolutional Neural Networks for Condition Assessment of Infrastructure. Struct. Health Monit. 2021, 20, 2124–2142. [Google Scholar] [CrossRef]
- Daneshgaran, F.; Zacheo, L.; Stasio, F.D.; Mondin, M. Use of Deep Learning for Automatic Detection of Cracks in Tunnels: Prototype-2 Developed in the 2017–2018 Time Period. Transp. Res. Rec. 2019, 2673, 44–50. [Google Scholar] [CrossRef]
- Chun, P.; Yamane, T.; Tsuzuki, Y. Automatic Detection of Cracks in Asphalt Pavement Using Deep Learning to Overcome Weaknesses in Images and GIS Visualization. Appl. Sci. 2021, 11, 892. [Google Scholar] [CrossRef]
- Billah, U.; La, H.; Gucunski, N.; Tavakkoli, A. Classification of Concrete Crack Using Deep Residual Network. Available online: https://www.semanticscholar.org/paper/Classification-of-Concrete-Crack-using-Deep-Network-Billah-La/5a639239a58a6ab617f848a2d16f7525fa18c0c2 (accessed on 9 November 2021).
- Chow, J.K.; Su, Z.; Wu, J.; Li, Z.; Tan, P.S.; Liu, K.; Mao, X.; Wang, Y.-H. Artificial Intelligence-Empowered Pipeline for Image-Based Inspection of Concrete Structures. Autom. Constr. 2020, 120, 103372. [Google Scholar] [CrossRef]
- Ni, F.; Zhang, J.; Chen, Z. Zernike-Moment Measurement of Thin-Crack Width in Images Enabled by Dual-Scale Deep Learning. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 367–384. [Google Scholar] [CrossRef]
- Wu, R.-T.; Singla, A.; Jahanshahi, M.R.; Bertino, E.; Ko, B.J.; Verma, D. Pruning Deep Convolutional Neural Networks for Efficient Edge Computing in Condition Assessment of Infrastructures. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 774–789. [Google Scholar] [CrossRef]
- Zhou, S.; Song, W. Deep Learning-Based Roadway Crack Classification Using Laser-Scanned Range Images: A Comparative Study on Hyperparameter Selection. Autom. Constr. 2020, 114, 103171. [Google Scholar] [CrossRef]
- Liang, X. Image-Based Post-Disaster Inspection of Reinforced Concrete Bridge Systems Using Deep Learning with Bayesian Optimization. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 415–430. [Google Scholar] [CrossRef]
- Kim, C.N.; Kawamura, K.; Nakamura, H.; Tarighat, A. Research on Automatic Crack Detection for Concrete Infrastructures Using Image Processing and Deep Learning. Curr. Approaches Sci. Technol. Res. 2021, 3, 46–55. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, W.; Chen, J.; Lin, W. Deep Convolution Neural Network-Based Transfer Learning Method for Civil Infrastructure Crack Detection. Autom. Constr. 2020, 116, 103199. [Google Scholar] [CrossRef]
- Özgenel, Ç.F. Concrete Crack Images for Classification. Mendeley Data 2019, 2. [Google Scholar] [CrossRef]
- Dorafshan, S.; Thomas, R.J.; Maguire, M. SDNET2018: An Annotated Image Dataset for Non-Contact Concrete Crack Detection Using Deep Convolutional Neural Networks. Data Brief 2018, 21, 1664–1668. [Google Scholar] [CrossRef]
- Xu, H.; Su, X.; Wang, Y.; Cai, H.; Cui, K.; Chen, X. Automatic Bridge Crack Detection Using a Convolutional Neural Network. Appl. Sci. 2019, 9, 2867. [Google Scholar] [CrossRef] [Green Version]
- Kouzehgar, M.; Krishnasamy Tamilselvam, Y.; Vega Heredia, M.; Rajesh Elara, M. Self-Reconfigurable Façade-Cleaning Robot Equipped with Deep-Learning-Based Crack Detection Based on Convolutional Neural Networks. Autom. Constr. 2019, 108, 102959. [Google Scholar] [CrossRef]
- Choi, D.; Shallue, C.J.; Nado, Z.; Lee, J.; Maddison, C.J.; Dahl, G.E. On Empirical Comparisons of Optimizers for Deep Learning. arXiv 2020, arXiv:1910.05446. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the 25th International Conference on Neural Information Processing Systems, Lake Tahoe, NV, USA, 3–6 December 2012; Curran Associates Inc.: Red Hook, NY, USA, 2012; Volume 1, pp. 1097–1105. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A.A. Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; AAAI Press: San Francisco, CA, USA, 2017; pp. 4278–4284. [Google Scholar]
- Xie, S.; Girshick, R.; Dollar, P.; Tu, Z.; He, K. Aggregated Residual Transformations for Deep Neural Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5987–5995. [Google Scholar]
- Zagoruyko, S.; Komodakis, N. Wide Residual Networks. In Procedings of the British Machine Vision Conference 2016; British Machine Vision Association: York, UK, 2016; pp. 87.1–87.12. [Google Scholar]
- Kim, B.; Cho, S. Automated Vision-Based Detection of Cracks on Concrete Surfaces Using a Deep Learning Technique. Sensors 2018, 18, 3452. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kamada, S.; Ichimura, T. An Embedded System for Image-Based Crack Detection by Using Fine-Tuning Model of Adaptive Structural Learning of Deep Belief Network. In Proceedings of the 2020 IEEE Region 10 Conference (Tencon), Osaka, Japan, 16–19 November 2020; pp. 1203–1208. [Google Scholar] [CrossRef]
- Wang, Z.; Xu, G.; Ding, Y.; Wu, B.; Lu, G. A Vision-Based Active Learning Convolutional Neural Network Model for Concrete Surface Crack Detection. Adv. Struct. Eng. 2020, 23, 2952–2964. [Google Scholar] [CrossRef]
- Xu, Y.; Bao, Y.; Zhang, Y.; Li, H. Attribute-Based Structural Damage Identification by Few-Shot Meta Learning with Inter-Class Knowledge Transfer. Struct. Health Monit. 2021, 20, 1494–1517. [Google Scholar] [CrossRef]
- Zhou, S.; Song, W. Deep Learning–Based Roadway Crack Classification with Heterogeneous Image Data Fusion. Struct. Health Monit. 2021, 20, 1274–1293. [Google Scholar] [CrossRef]
- Billah, U.H.; Tavakkoli, A.; La, H.M. Concrete Crack Pixel Classification Using an Encoder Decoder Based Deep Learning Architecture. In Proceedings of the Advances in Visual Computing, Lake Tahoe, NV, USA, 7–9 October 2019; Springer-Verlag: Berlin, Heidelberg; pp. 593–604. [Google Scholar]
- Xie, S.; Tu, Z. Holistically-nested edge detection. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1395–1403. [Google Scholar]
- McLaughlin, E.; Charron, N.; Narasimhan, S. Automated Defect Quantification in Concrete Bridges Using Robotics and Deep Learning. J. Comput. Civ. Eng. 2020, 34, 04020029. [Google Scholar] [CrossRef]
- Chaiyasarn, K.; Khan, W.; Ali, L.; Sharma, M.; Brackenbury, D.; Dejong, M. Crack Detection in Masonry Structures Using Convolutional Neural Networks and Support Vector Machines. In Proceedings of the International Symposium on Automation and Robotics in Construction, Berlin, Germany, 20–25 July 2018; pp. 118–125. [Google Scholar]
- Zhang, X.; Wang, X. An Effective Bridge Cracks Classification Method Based on Machine Learning. In Proceedings of the 2020 4th International Conference on Electronic Information Technology and Computer Engineering, Xiamen, China, 6–8 November 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 790–794. [Google Scholar]
- Wang, L.; Kawaguchi, K.; Wang, P. Damaged Ceiling Detection and Localization in Large-Span Structures Using Convolutional Neural Networks. Autom. Constr. 2020, 116, 103230. [Google Scholar] [CrossRef]
- Xu, X.; Yang, H. Vision Measurement of Tunnel Structures with Robust Modelling and Deep Learning Algorithms. Sensors 2020, 20, 4945. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, X.; Zhao, P.; Zhang, Y.; Zou, Z.; Ou, J. Automatic Damage Detection of Historic Masonry Buildings Based on Mobile Deep Learning. Autom. Constr. 2019, 103, 53–66. [Google Scholar] [CrossRef]
- Wang, M.C. Development and Improvement of Deep Learning Based Automated Defect Detection for Sewer Pipe Inspection Using Faster R-CNN. In Proceedings of the 25th EG-ICE International Workshop 2018, Lausanne, Switzerland, 10–13 June 2018. [Google Scholar]
- Li, L.; Zhang, H.; Pang, J.; Huang, J. Dam Surface Crack Detection Based on Deep Learning. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, New York, NY, USA, 20 September 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 738–743. [Google Scholar]
- Zeshan, M.U.; Gang, P. Automatic Sewer Cracks Localization Using Deformable Bounding Boxes. In Proceedings of the 2020 4th International Conference on Computer Science and Artificial Intelligence, New York, NY, USA, 11 December 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 159–167. [Google Scholar]
- Qi, S.; Dong, Y.; Mao, Q. Improving Single Shot Detector for Industrial Cracks by Feature Resolution Analysis. In Proceedings of the 2020 3rd International Conference on Artificial Intelligence and Pattern Recognition, New York, NY, USA, 26 June 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 196–200. [Google Scholar]
- Yang, J.; Fu, Q.; Nie, M. Road Crack Detection Using Deep Neural Network with Receptive Field Block. IOP Conf. Ser. Mater. Sci. Eng. 2020, 782, 042033. [Google Scholar] [CrossRef]
- Yan, K.; Zhang, Z. Automated Asphalt Highway Pavement Crack Detection Based on Deformable Single Shot Multi-Box Detector Under a Complex Environment. IEEE Access 2021, 9, 150925–150938. [Google Scholar] [CrossRef]
- Cao, M.-T.; Tran, Q.-V.; Nguyen, N.-M.; Chang, K.-T. Survey on Performance of Deep Learning Models for Detecting Road Damages Using Multiple Dashcam Image Resources. Adv. Eng. Inform. 2020, 46, 101182. [Google Scholar] [CrossRef]
- Ochoa-Ruiz, G.; Angulo-Murillo, A.A.; Ochoa-Zezzatti, A.; Aguilar-Lobo, L.M.; Vega-Fernández, J.A.; Natraj, S. An Asphalt Damage Dataset and Detection System Based on RetinaNet for Road Conditions Assessment. Appl. Sci. 2020, 10, 3974. [Google Scholar] [CrossRef]
- Maeda, H.; Sekimoto, Y.; Seto, T.; Kashiyama, T.; Omata, H. Road Damage Detection Using Deep Neural Networks with Images Captured Through a Smartphone. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 1127–1141. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Goyal, P.; Girshick, R.; He, K.; Dollár, P. Focal Loss for Dense Object Detection. In Proceedings of the IEEE international conference on computer vision, Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef] [Green Version]
- Deng, L.; Chu, H.-H.; Shi, P.; Wang, W.; Kong, X. Region-Based CNN Method with Deformable Modules for Visually Classifying Concrete Cracks. Appl. Sci. 2020, 10, 2528. [Google Scholar] [CrossRef] [Green Version]
- Cheng, J.C.P.; Wang, M. Automated Detection of Sewer Pipe Defects in Closed-Circuit Television Images Using Deep Learning Techniques. Autom. Constr. 2018, 95, 155–171. [Google Scholar] [CrossRef]
- Kalfarisi, R.; Wu, Z.Y.; Soh, K. Crack Detection and Segmentation Using Deep Learning with 3D Reality Mesh Model for Quantitative Assessment and Integrated Visualization. J. Comput. Civ. Eng. 2020, 34, 04020010. [Google Scholar] [CrossRef]
- Słoński, M.; Tekieli, M. 2D Digital Image Correlation and Region-Based Convolutional Neural Network in Monitoring and Evaluation of Surface Cracks in Concrete Structural Elements. Materials 2020, 13, 3527. [Google Scholar] [CrossRef] [PubMed]
- Deng, J.; Lu, Y.; Lee, V.C.-S. Imaging-Based Crack Detection on Concrete Surfaces Using You Only Look Once Network. Struct. Health Monit. 2021, 20, 484–499. [Google Scholar] [CrossRef]
- Du, Y.; Pan, N.; Xu, Z.; Deng, F.; Shen, Y.; Kang, H. Pavement Distress Detection and Classification Based on YOLO Network. Int. J. Pavement Eng. 2021, 22, 1659–1672. [Google Scholar] [CrossRef]
- Zhang, C.; Chang, C.; Jamshidi, M. Concrete Bridge Surface Damage Detection Using a Single-Stage Detector. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 389–409. [Google Scholar] [CrossRef]
- Zhang, C.; Chang, C.-C. Surface Damage Detection for Concrete Bridges Using Single-Stage Convolutional Neural Networks. In Proceedings of the Health Monitoring of Structural and Biological Systems XIII, Denver, CO, USA, 1 April 2019; Volume 10972, pp. 527–534. [Google Scholar]
- Park, S.E.; Eem, S.-H.; Jeon, H. Concrete Crack Detection and Quantification Using Deep Learning and Structured Light. Constr. Build. Mater. 2020, 252, 119096. [Google Scholar] [CrossRef]
- Li, S.; Gu, X.; Xu, X.; Xu, D.; Zhang, T.; Liu, Z.; Dong, Q. Detection of Concealed Cracks from Ground Penetrating Radar Images Based on Deep Learning Algorithm. Constr. Build. Mater. 2021, 273, 121949. [Google Scholar] [CrossRef]
- Yao, G.; Sun, Y.; Wong, M.; Lv, X. A Real-Time Detection Method for Concrete Surface Cracks Based on Improved YOLOv4. Symmetry 2021, 13, 1716. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, G.; Zhang, L. A Spatial-Channel Hierarchical Deep Learning Network for Pixel-Level Automated Crack Detection. Autom. Constr. 2020, 119, 103357. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M. A Cost Effective Solution for Pavement Crack Inspection Using Cameras and Deep Neural Networks. Constr. Build. Mater. 2020, 256, 119397. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, J.; Cui, B.; Wang, D.; Wang, X. Patch-Based Weakly Supervised Semantic Segmentation Network for Crack Detection. Constr. Build. Mater. 2020, 258, 120291. [Google Scholar] [CrossRef]
- Zhang, L.; Shen, J.; Zhu, B. A Research on an Improved Unet-Based Concrete Crack Detection Algorithm. Struct. Health Monit. 2021, 20, 1864–1879. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, B.; Wang, J.; Li, J.; Sun, X. APLCNet: Automatic Pixel-Level Crack Detection Network Based on Instance Segmentation. IEEE Access 2020, 8, 199159–199170. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M. Multi-Level Feature Fusion in Densely Connected Deep-Learning Architecture and Depth-First Search for Crack Segmentation on Images Collected with Smartphones. Struct. Health Monit. 2020, 19, 1726–1744. [Google Scholar] [CrossRef]
- Park, S.; Bang, S.; Kim, H.; Kim, H. Patch-Based Crack Detection in Black Box Images Using Convolutional Neural Networks. J. Comput. Civ. Eng. 2019, 33, 04019017. [Google Scholar] [CrossRef]
- Shokri, P.; Shahbazi, M.; Lichti, D.; Nielsen, J. Vision-Based Approaches for Quantifying Cracks in Concrete Structures. In Proceedings of the The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Göttingen, Germany, 14 August 2020; Volume XLIII-B2-2020, pp. 1167–1174. [Google Scholar]
- Fang, J.; Qu, B.; Yuan, Y. Distribution Equalization Learning Mechanism for Road Crack Detection. Neurocomputing 2021, 424, 193–204. [Google Scholar] [CrossRef]
- Ye, X.-W.; Jin, T.; Chen, P.-Y. Structural Crack Detection Using Deep Learning–Based Fully Convolutional Networks. Adv. Struct. Eng. 2019, 22, 3412–3419. [Google Scholar] [CrossRef]
- Cheng, J.; Xiong, W.; Chen, W.; Gu, Y.; Li, Y. Pixel-Level Crack Detection Using U-Net. In Proceedings of the TENCON 2018—2018 IEEE Region 10 Conference, Jeju, Korea, 28–31 October 2018. [Google Scholar] [CrossRef]
- Xue, Y.; Li, Y. A Fast Detection Method via Region-Based Fully Convolutional Neural Networks for Shield Tunnel Lining Defects. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 638–654. [Google Scholar] [CrossRef]
- Islam, M.M.M.; Kim, J.-M. Vision-Based Autonomous Crack Detection of Concrete Structures Using a Fully Convolutional Encoder–Decoder Network. Sensors 2019, 19, 4251. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.; Cho, S. Automated Multiple Concrete Damage Detection Using Instance Segmentation Deep Learning Model. Appl. Sci. 2020, 10, 8008. [Google Scholar] [CrossRef]
- Hoskere, V.; Narazaki, Y.; Hoang, T.A.; Spencer Jr., B.F. MaDnet: Multi-Task Semantic Segmentation of Multiple Types of Structural Materials and Damage in Images of Civil Infrastructure. J. Civ. Struct Health Monit 2020, 10, 757–773. [Google Scholar] [CrossRef]
- Shim, S.; Cho, G.-C. Lightweight Semantic Segmentation for Road-Surface Damage Recognition Based on Multiscale Learning. IEEE Access 2020, 8, 102680–102690. [Google Scholar] [CrossRef]
- Wei, F.; Yao, G.; Yang, Y.; Sun, Y. Instance-Level Recognition and Quantification for Concrete Surface Bughole Based on Deep Learning. Autom. Constr. 2019, 107, 102920. [Google Scholar] [CrossRef]
- Kanaeva, I.A.; Ivanova, J.A. Road Pavement Crack Detection Using Deep Learning with Synthetic Data. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1019, 012036. [Google Scholar] [CrossRef]
- Song, C.; Wu, L.; Chen, Z.; Zhou, H.; Lin, P.; Cheng, S.; Wu, Z. Pixel-Level Crack Detection in Images Using SegNet. In Multi-disciplinary Trends in Artificial Intelligence; Chamchong, R., Wong, K.W., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 247–254. [Google Scholar]
- Truong, L.N.H.; Mora, O.E.; Cheng, W.; Tang, H.; Singh, M. Deep Learning to Detect Road Distress from Unmanned Aerial System Imagery. Transp. Res. Rec. 2021, 2675, 776–788. [Google Scholar] [CrossRef]
- Shi, Y.; Cui, L.; Qi, Z.; Meng, F.; Chen, Z. Automatic Road Crack Detection Using Random Structured Forests. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3434–3445. [Google Scholar] [CrossRef]
- Chambon, S.; Moliard, J.-M. Automatic Road Pavement Assessment with Image Processing: Review and Comparison. Int. J. Geophys. 2011, 2011, e989354. [Google Scholar] [CrossRef] [Green Version]
- Dung, C.V.; Anh, L.D. Autonomous Concrete Crack Detection Using Deep Fully Convolutional Neural Network. Autom. Constr. 2019, 99, 52–58. [Google Scholar] [CrossRef]
- Yang, X.; Li, H.; Yu, Y.; Luo, X.; Huang, T.; Yang, X. Automatic Pixel-Level Crack Detection and Measurement Using Fully Convolutional Network. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 1090–1109. [Google Scholar] [CrossRef]
- Li, S.; Zhao, X.; Zhou, G. Automatic Pixel-Level Multiple Damage Detection of Concrete Structure Using Fully Convolutional Network. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 616–634. [Google Scholar] [CrossRef]
- Bhowmick, S.; Nagarajaiah, S.; Veeraraghavan, A. Vision and Deep Learning-Based Algorithms to Detect and Quantify Cracks on Concrete Surfaces from UAV Videos. Sensors 2020, 20, 6299. [Google Scholar] [CrossRef] [PubMed]
- Sizyakin, R.; Voronin, V.; Gapon, N.; Pižurica, A. A Deep Learning Approach to Crack Detection on Road Surfaces. In Proceedings of the Artificial Intelligence and Machine Learning in Defense Applications II, Online Only, UK, 20 September 2020; Volume 11543, pp. 128–134. [Google Scholar]
- Andrushia, A.D.; Anand, N.; Lubloy, E.; Prince, A.G. Deep Learning Based Thermal Crack Detection on Structural Concrete Exposed to Elevated Temperature. Adv. Struct. Eng. 2021, 24, 1896–1909. [Google Scholar] [CrossRef]
- Ji, J.; Wu, L.; Chen, Z.; Yu, J.; Lin, P.; Cheng, S. Automated Pixel-Level Surface Crack Detection Using U-Net. In Multi-Disciplinary Trends in Artificial Intelligence; Kaenampornpan, M., Malaka, R., Nguyen, D.D., Schwind, N., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 69–78. [Google Scholar]
- Amhaz, R.; Chambon, S.; Idier, J.; Baltazart, V. Automatic Crack Detection on Two-Dimensional Pavement Images: An Algorithm Based on Minimal Path Selection. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2718–2729. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Rajan, D.; Story, B. Concrete Crack Detection Using Context-Aware Deep Semantic Segmentation Network. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 951–971. [Google Scholar] [CrossRef]
- Li, G.; Liu, Q.; Ren, W.; Qiao, W.; Ma, B.; Wan, J. Automatic Recognition and Analysis System of Asphalt Pavement Cracks Using Interleaved Low-Rank Group Convolution Hybrid Deep Network and SegNet Fusing Dense Condition Random Field. Measurement 2021, 170, 108693. [Google Scholar] [CrossRef]
- Ren, Y.; Huang, J.; Hong, Z.; Lu, W.; Yin, J.; Zou, L.; Shen, X. Image-Based Concrete Crack Detection in Tunnels Using Deep Fully Convolutional Networks. Constr. Build. Mater. 2020, 234, 117367. [Google Scholar] [CrossRef]
- Zheng, X.; Zhang, S.; Li, X.; Li, G.; Li, X. Lightweight Bridge Crack Detection Method Based on SegNet and Bottleneck Depth-Separable Convolution With Residuals. IEEE Access 2021, 9, 161649–161668. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention 2015; Navab, N., Hornegger, J., Wells, W.M., Frangi, A.F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Yao, J.; Lu, X.; Xie, R.; Li, L. DeepCrack: A Deep Hierarchical Feature Learning Architecture for Crack Segmentation. Neurocomputing 2019, 338, 139–153. [Google Scholar] [CrossRef]
- Liu, Z.; Cao, Y.; Wang, Y.; Wang, W. Computer Vision-Based Concrete Crack Detection Using U-Net Fully Convolutional Networks. Autom. Constr. 2019, 104, 129–139. [Google Scholar] [CrossRef]
- Li, H.; Song, D.; Liu, Y.; Li, B. Automatic Pavement Crack Detection by Multi-Scale Image Fusion. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2025–2036. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.P.; Li, B.; Yang, E.; Dai, X.; Peng, Y.; Fei, Y.; Liu, Y.; Li, J.Q.; Chen, C. Automated Pixel-Level Pavement Crack Detection on 3D Asphalt Surfaces Using a Deep-Learning Network. Comput. Aided Civ. Infrastruct. Eng. 2017, 32, 805–819. [Google Scholar] [CrossRef]
- Zhang, A.; Wang, K.C.P.; Fei, Y.; Liu, Y.; Tao, S.; Chen, C.; Li, J.Q.; Li, B. Deep Learning–Based Fully Automated Pavement Crack Detection on 3D Asphalt Surfaces with an Improved CrackNet. J. Comput. Civ. Eng. 2018, 32, 04018041. [Google Scholar] [CrossRef] [Green Version]
- Fei, Y.; Wang, K.C.P.; Zhang, A.; Chen, C.; Li, J.Q.; Liu, Y.; Yang, G.; Li, B. Pixel-Level Cracking Detection on 3D Asphalt Pavement Images Through Deep-Learning- Based CrackNet-V. IEEE Trans. Intell. Transp. Syst. 2020, 21, 273–284. [Google Scholar] [CrossRef]
- Kim, J.J.; Kim, A.-R.; Lee, S.-W. Artificial Neural Network-Based Automated Crack Detection and Analysis for the Inspection of Concrete Structures. Appl. Sci. 2020, 10, 8105. [Google Scholar] [CrossRef]
- Nasiruddin Khilji, T.; Lopes Amaral Loures, L.; Rezazadeh Azar, E. Distress Recognition in Unpaved Roads Using Unmanned Aerial Systems and Deep Learning Segmentation. J. Comput. Civ. Eng. 2021, 35, 04020061. [Google Scholar] [CrossRef]
- Chen, L.-C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution, and Fully Connected CRFs. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 834–848. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid Scene Parsing Network. In Proceedings of the IEEE Computer Society, Honolulu, HI, USA, 1 July 2017; pp. 6230–6239. [Google Scholar]
- Ding, H.; Jiang, X.; Shuai, B.; Liu, A.Q.; Wang, G. Context Contrasted Feature and Gated Multi-Scale Aggregation for Scene Segmentation. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2393–2402. [Google Scholar]
- Kim, B.; Cho, S. Image-Based Concrete Crack Assessment Using Mask and Region-Based Convolutional Neural Network. Struct. Control. Health Monit. 2019, 26, e2381. [Google Scholar] [CrossRef]
- Kang, D.; Benipal, S.S.; Gopal, D.L.; Cha, Y.-J. Hybrid Pixel-Level Concrete Crack Segmentation and Quantification across Complex Backgrounds Using Deep Learning. Autom. Constr. 2020, 118, 103291. [Google Scholar] [CrossRef]
- Majidifard, H.; Adu-Gyamfi, Y.; Buttlar, W.G. Deep Machine Learning Approach to Develop a New Asphalt Pavement Condition Index. Constr. Build. Mater. 2020, 247, 118513. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Dais, D.; Bal, İ.E.; Smyrou, E.; Sarhosis, V. Automatic Crack Classification and Segmentation on Masonry Surfaces Using Convolutional Neural Networks and Transfer Learning. Autom. Constr. 2021, 125, 103606. [Google Scholar] [CrossRef]
- Feng, C.; Zhang, H.; Wang, H.; Wang, S.; Li, Y. Automatic Pixel-Level Crack Detection on Dam Surface Using Deep Convolutional Network. Sensors 2020, 20, 2069. [Google Scholar] [CrossRef] [Green Version]
- Bang, S.; Park, S.; Kim, H.; Kim, H. Encoder–Decoder Network for Pixel-Level Road Crack Detection in Black-Box Images. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 713–727. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, L.; Yu, S.; Prokhorov, D.; Mei, X.; Ling, H. Feature Pyramid and Hierarchical Boosting Network for Pavement Crack Detection. arXiv 2019, arXiv:1901.06340. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Shen, Y.; Shen, C. A Real-Time Detection Approach for Bridge Cracks Based on YOLOv4-FPM. Autom. Constr. 2021, 122, 103514. [Google Scholar] [CrossRef]
- Li, S.; Zhao, X. Automatic Crack Detection and Measurement of Concrete Structure Using Convolutional Encoder-Decoder Network. IEEE Access 2020, 8, 134602–134618. [Google Scholar] [CrossRef]
- Alipour, M.; Harris, D.K.; Miller, G.R. Robust Pixel-Level Crack Detection Using Deep Fully Convolutional Neural Networks. J. Comput. Civ. Eng. 2019, 33, 04019040. [Google Scholar] [CrossRef]
- Ni, F.; Zhang, J.; Chen, Z. Pixel-Level Crack Delineation in Images with Convolutional Feature Fusion. Struct. Control. Health Monit. 2019, 26, e2286. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Yang, J.; Jiang, H.; Fan, X. CNN Training with Twenty Samples for Crack Detection via Data Augmentation. Sensors 2020, 20, 4849. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Zhang, J. Real-Time Crack Assessment Using Deep Neural Networks with Wall-Climbing Unmanned Aerial System. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 549–564. [Google Scholar] [CrossRef]
- Li, G.; Ma, B.; He, S.; Ren, X.; Liu, Q. Automatic Tunnel Crack Detection Based on U-Net and a Convolutional Neural Network with Alternately Updated Clique. Sensors 2020, 20, 717. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Billah, U.H.; La, H.M.; Tavakkoli, A. Deep Learning-Based Feature Silencing for Accurate Concrete Crack Detection. Sensors 2020, 20, 4403. [Google Scholar] [CrossRef] [PubMed]
- Stentoumis, C.; Protopapadakis, E.; Doulamis, A.; Doulamis, N. A Holistic Approach for Inspection of Civil Infrastructures Based on Computer Vision Techniques. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41B5, 131–138. [Google Scholar] [CrossRef] [Green Version]
- Cha, Y.-J.; Choi, W.; Suh, G.; Mahmoudkhani, S.; Büyüköztürk, O. Autonomous Structural Visual Inspection Using Region-Based Deep Learning for Detecting Multiple Damage Types. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 731–747. [Google Scholar] [CrossRef]
- Fang, X.; Guo, W.; Li, Q.; Zhu, J.; Chen, Z.; Yu, J.; Zhou, B.; Yang, H. Sewer Pipeline Fault Identification Using Anomaly Detection Algorithms on Video Sequences. IEEE Access 2020, 8, 39574–39586. [Google Scholar] [CrossRef]
- Song, Q.; Wu, Y.; Xin, X.; Yang, L.; Yang, M.; Chen, H.; Liu, C.; Hu, M.; Chai, X.; Li, J. Real-Time Tunnel Crack Analysis System via Deep Learning. IEEE Access 2019, 7, 64186–64197. [Google Scholar] [CrossRef]
- Shin, H.K.; Ahn, Y.H.; Lee, S.H.; Kim, H.Y. Automatic Concrete Damage Recognition Using Multi-Level Attention Convolutional Neural Network. Materials 2020, 13, E5549. [Google Scholar] [CrossRef] [PubMed]
- Dorafshan, S.; Azari, H. Deep Learning Models for Bridge Deck Evaluation Using Impact Echo. Constr. Build. Mater. 2020, 263, 120109. [Google Scholar] [CrossRef]
- Yin, X.; Chen, Y.; Bouferguene, A.; Zaman, H.; Al-Hussein, M.; Kurach, L. A Deep Learning-Based Framework for an Automated Defect Detection System for Sewer Pipes. Autom. Constr. 2020, 109, 102967. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, J.; Wang, Z.; Zhang, X.; Gao, Y.; Sui, Q.; Jiang, P. A Deep-Learning-Based Multiple Defect Detection Method for Tunnel Lining Damages. IEEE Access 2019, 7, 182643–182657. [Google Scholar] [CrossRef]
- Elhariri, E.; El-Bendary, N.; Taie, S.A. Using Hybrid Filter-Wrapper Feature Selection With Multi-Objective Improved-Salp Optimization for Crack Severity Recognition. IEEE Access 2020, 8, 84290–84315. [Google Scholar] [CrossRef]
- Kobayashi, T. Spiral-Net with F1-Based Optimization for Image-Based Crack Detection. In Proceedings of the Computer Vision—ACCV 2018, Perth, Western Australia, 2–6 December 2018; Jawahar, C.V., Li, H., Mori, G., Schindler, K., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 88–104. [Google Scholar]
- Wang, B.; Li, Y.; Zhao, W.; Zhang, Z.; Zhang, Y.; Wang, Z. Effective Crack Damage Detection Using Multilayer Sparse Feature Representation and Incremental Extreme Learning Machine. Appl. Sci. 2019, 9, 614. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Su, C. Semi-Supervised Semantic Segmentation Network for Surface Crack Detection. Autom. Constr. 2021, 128, 103786. [Google Scholar] [CrossRef]
- Wang, J.-J.; Liu, Y.-F.; Nie, X.; Mo, Y.L. Deep Convolutional Neural Networks for Semantic Segmentation of Cracks. Struct. Control. Health Monit. 2022, 29, e2850. [Google Scholar] [CrossRef]
- Li, G.; Li, X.; Zhou, J.; Liu, D.; Ren, W. Pixel-Level Bridge Crack Detection Using a Deep Fusion about Recurrent Residual Convolution and Context Encoder Network. Measurement 2021, 176, 109171. [Google Scholar] [CrossRef]
- Teng, S.; Liu, Z.; Chen, G.; Cheng, L. Concrete Crack Detection Based on Well-Known Feature Extractor Model and the YOLO_v2 Network. Appl. Sci. 2021, 11, 813. [Google Scholar] [CrossRef]
- Tran, V.P.; Tran, T.S.; Lee, H.J.; Kim, K.D.; Baek, J.; Nguyen, T.T. One Stage Detector (RetinaNet)-Based Crack Detection for Asphalt Pavements Considering Pavement Distresses and Surface Objects. J. Civ. Struct. Health Monit. 2021, 11, 205–222. [Google Scholar] [CrossRef]
- Tran, T.S.; Tran, V.P.; Lee, H.J.; Flores, J.M.; Le, V.P. A Two-Step Sequential Automated Crack Detection and Severity Classification Process for Asphalt Pavements. Int. J. Pavement Eng. 2020, 1–15. [Google Scholar] [CrossRef]
- Ibragimov, E.; Lee, H.-J.; Lee, J.-J.; Kim, N. Automated Pavement Distress Detection Using Region Based Convolutional Neural Networks. Int. J. Pavement Eng. 2020, 1–12. [Google Scholar] [CrossRef]
- Huyan, J.; Li, W.; Tighe, S.; Xu, Z.; Zhai, J. CrackU-Net: A Novel Deep Convolutional Neural Network for Pixelwise Pavement Crack Detection. Struct. Control. Health Monit. 2020, 27, e2551. [Google Scholar] [CrossRef]
- Nhat-Duc, H.; Nguyen, Q.-L.; Tran, V.-D. Automatic Recognition of Asphalt Pavement Cracks Using Metaheuristic Optimized Edge Detection Algorithms and Convolution Neural Network. Autom. Constr. 2018, 94, 203–213. [Google Scholar] [CrossRef]
- Ali, L.; Valappil, N.K.; Kareem, D.N.A.; John, M.J.; Al Jassmi, H. Pavement Crack Detection and Localization Using Convolutional Neural Networks (CNNs). In Proceedings of the 2019 International Conference on Digitization (ICD), Piscataway, NJ, USA, 18–19 November 2019; pp. 217–221. [Google Scholar]
- Chow, J.K.; Su, Z.; Wu, J.; Tan, P.S.; Mao, X.; Wang, Y.H. Anomaly Detection of Defects on Concrete Structures with the Convolutional Autoencoder. Adv. Eng. Inform. 2020, 45, 101105. [Google Scholar] [CrossRef]
- Tong, Z.; Yuan, D.; Gao, J.; Wang, Z. Pavement Defect Detection with Fully Convolutional Network and an Uncertainty Framework. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 832–849. [Google Scholar] [CrossRef]
- Luo, D.; Lu, J.; Guo, G. Road Anomaly Detection Through Deep Learning Approaches. IEEE Access 2020, 8, 117390–117404. [Google Scholar] [CrossRef]
- Samma, H.; Suandi, S.A.; Ismail, N.A.; Sulaiman, S.; Ping, L.L. Evolving Pre-Trained CNN Using Two-Layers Optimizer for Road Damage Detection From Drone Images. IEEE Access 2021, 9, 158215–158226. [Google Scholar] [CrossRef]
- Gao, S.; Jie, Z.; Pan, Z.; Qin, F.; Li, R. Automatic Recognition of Pavement Crack via Convolutional Neural Network. In Transactions on Edutainment XIV; Pan, Z., Cheok, A.D., Müller, W., Eds.; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2018; pp. 82–89. ISBN 978-3-662-56689-3. [Google Scholar]
- Jiang, Y.; Han, S.; Bai, Y. Development of a Pavement Evaluation Tool Using Aerial Imagery and Deep Learning. J. Transp. Eng. Part B Pavements 2021, 147, 04021027. [Google Scholar] [CrossRef]
- Azhari, F.; Sennersten, C.; Milford, M.; Peynot, T. PointCrack3D: Crack Detection in Unstructured Environments Using a 3D-Point-Cloud-Based Deep Neural Network. arXiv 2021, arXiv:2111.11615. [Google Scholar]
- Rezaie, A.; Achanta, R.; Godio, M.; Beyer, K. Comparison of Crack Segmentation Using Digital Image Correlation Measurements and Deep Learning. Constr. Build. Mater. 2020, 261, 120474. [Google Scholar] [CrossRef]
- Maningo, J.M.Z.; Bandala, A.A.; Bedruz, R.A.R.; Dadios, E.P.; Lacuna, R.J.N.; Manalo, A.B.O.; Perez, P.L.E.; Sia, N.P.C. Crack Detection With 2D Wall Mapping For Building Safety Inspection. In Proceedings of the 2020 IEEE Region 10 Conference (Tencon), Osaka, Japan, 16–19 November 2020; pp. 702–707. [Google Scholar]
- Li, H.; Xu, H.; Tian, X.; Wang, Y.; Cai, H.; Cui, K.; Chen, X. Bridge Crack Detection Based on SSENets. Appl. Sci. 2020, 10, 4230. [Google Scholar] [CrossRef]
- Bae, H.; Jang, K.; An, Y.-K. Deep Super Resolution Crack Network (SrcNet) for Improving Computer Vision–Based Automated Crack Detectability in in Situ Bridges. Struct. Health Monit. 2021, 20, 1428–1442. [Google Scholar] [CrossRef]
- Kim, J.; Shim, S.; Cha, Y.; Cho, G.-C. Lightweight Pixel-Wise Segmentation for Efficient Concrete Crack Detection Using Hierarchical Convolutional Neural Network. Smart Mater. Struct. 2021, 30, 045023. [Google Scholar] [CrossRef]
- Li, H.; Zong, J.; Nie, J.; Wu, Z.; Han, H. Pavement Crack Detection Algorithm Based on Densely Connected and Deeply Supervised Network. IEEE Access 2021, 9, 11835–11842. [Google Scholar] [CrossRef]
- Ko, P.; Prieto, S.A.; Soto, B.G. de ABECIS: An Automated Building Exterior Crack Inspection System Using UAVs, Open-Source Deep Learning and Photogrammetry. In Proceedings of the 38th International Symposium on Automation and Robotics in Construction, Dubai, United Arab Emirates, 2–4 November 2021; pp. 637–644. [Google Scholar]
- Rajadurai, R.-S.; Kang, S.-T. Automated Vision-Based Crack Detection on Concrete Surfaces Using Deep Learning. Appl. Sci. 2021, 11, 5229. [Google Scholar] [CrossRef]
- Yu, Y.; Guan, H.; Li, D.; Zhang, Y.; Jin, S.; Yu, C. CCapFPN: A Context-Augmented Capsule Feature Pyramid Network for Pavement Crack Detection. IEEE Trans. Intell. Transp. Syst. 2020, 1–12. [Google Scholar] [CrossRef]
- Mei, Q.; Gül, M.; Azim, M.R. Densely Connected Deep Neural Network Considering Connectivity of Pixels for Automatic Crack Detection. Autom. Constr. 2020, 110, 103018. [Google Scholar] [CrossRef]
- Tan, C.; Uddin, N.; Mohammed, Y.M. Deep Learning-Based Crack Detection Using Mask R-CNN Technique. In Proceedings of the 9 th International Conference on Structural Health Monitoring of Intelligent Infrastructure, St. Louis, MO, USA, 4–7 August 2019. [Google Scholar]
- Peraka, N.S.P.; Biligiri, K.P.; Kalidindi, S.N. Development of a Multi-Distress Detection System for Asphalt Pavements: Transfer Learning-Based Approach. Transp. Res. Rec. 2021, 2675, 538–553. [Google Scholar] [CrossRef]
- Lee, J.; Kim, H.-S.; Kim, N.; Ryu, E.-M.; Kang, J.-W. Learning to Detect Cracks on Damaged Concrete Surfaces Using Two-Branched Convolutional Neural Network. Sensors 2019, 19, 4796. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kyslytsyna, A.; Xia, K.; Kislitsyn, A.; Abd El Kader, I.; Wu, Y. Road Surface Crack Detection Method Based on Conditional Generative Adversarial Networks. Sensors 2021, 21, 7405. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Lin, H.; Yao, M. Improving the Efficiency of Encoder-Decoder Architecture for Pixel-Level Crack Detection. IEEE Access 2019, 7, 186657–186670. [Google Scholar] [CrossRef]
- Wu, S.; Fang, J.; Zheng, X.; Li, X. Sample and Structure-Guided Network for Road Crack Detection. IEEE Access 2019, 7, 130032–130043. [Google Scholar] [CrossRef]
- Fan, Z.; Li, C.; Chen, Y.; Wei, J.; Loprencipe, G.; Chen, X.; Di Mascio, P. Automatic Crack Detection on Road Pavements Using Encoder-Decoder Architecture. Materials 2020, 13, 2960. [Google Scholar] [CrossRef]
- Bang, S.; Park, S.; Kim, H.; Yoon, Y.S.; Kim, H. A Deep Residual Network with Transfer Learning for Pixel-Level Road Crack Detection. Network 2018, 93, 89-03. [Google Scholar]
- Fan, L.; Zhao, H.; Li, Y.; Li, S.; Zhou, R.; Chu, W. RAO-UNet: A Residual Attention and Octave UNet for Road Crack Detection via Balance Loss. IET Intell. Transp. Syst. 2022, 16, 332–343. [Google Scholar] [CrossRef]
- Wang, W.; Su, C. Convolutional Neural Network-Based Pavement Crack Segmentation Using Pyramid Attention Network. IEEE Access 2020, 8, 206548–206558. [Google Scholar] [CrossRef]
- Liu, J.; Yang, X.; Lau, S.; Wang, X.; Luo, S.; Lee, V.C.-S.; Ding, L. Automated Pavement Crack Detection and Segmentation Based on Two-Step Convolutional Neural Network. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 1291–1305. [Google Scholar] [CrossRef]
- Cui, X.; Wang, Q.; Dai, J.; Xue, Y.; Duan, Y. Intelligent Crack Detection Based on Attention Mechanism in Convolution Neural Network. Adv. Struct. Eng. 2021, 24, 1859–1868. [Google Scholar] [CrossRef]
- Duan, L.; Geng, H.; Pang, J.; Zeng, J. Unsupervised Pixel-Level Crack Detection Based on Generative Adversarial Network. Proceedings of 2020 5th International Conference on Multimedia Systems and Signal Processing; Association for Computing Machinery, New York, NY, USA, 28 May 2020; Association for Computing Machinery: New York, NY, USA, 2020; pp. 6–10. [Google Scholar]
- Zhang, K.; Zhang, Y.; Cheng, H.D. Self-Supervised Structure Learning for Crack Detection Based on Cycle-Consistent Generative Adversarial Networks. J. Comput. Civ. Eng. 2020, 34, 04020004. [Google Scholar] [CrossRef]
- Ghosh Mondal, T.; Jahanshahi, M.R.; Wu, R.-T.; Wu, Z.Y. Deep Learning-Based Multi-Class Damage Detection for Autonomous Post-Disaster Reconnaissance. Struct. Control. Health Monit. 2020, 27, e2507. [Google Scholar] [CrossRef]
- Lyu, P.; Wang, J.; Wei, R. Pavement Crack Image Detection Based on Deep Learning. In Proceedings of the 2019 3rd International Conference on Deep Learning Technologies, New York, NY, USA, 5 July 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 6–10. [Google Scholar]
- Shim, S.; Kim, J.; Cho, G.-C.; Lee, S.-W. Multiscale and Adversarial Learning-Based Semi-Supervised Semantic Segmentation Approach for Crack Detection in Concrete Structures. IEEE Access 2020, 8, 170939–170950. [Google Scholar] [CrossRef]
- Zhang, Y.; Yuen, K.-V. Crack Detection Using Fusion Features-Based Broad Learning System and Image Processing. Comput. Aided Civ. Infrastruct. Eng. 2021, 36, 1568–1584. [Google Scholar] [CrossRef]
- Lins, R.G.; Givigi, S.N. Automatic Crack Detection and Measurement Based on Image Analysis. IEEE Trans. Instrum. Meas. 2016, 65, 583–590. [Google Scholar] [CrossRef]
- Li, G.; He, S.; Ju, Y.; Du, K. Long-Distance Precision Inspection Method for Bridge Cracks with Image Processing. Autom. Constr. 2014, 41, 83–95. [Google Scholar] [CrossRef]
- Cho, H.; Yoon, H.-J.; Jung, J.-Y. Image-Based Crack Detection Using Crack Width Transform (CWT) Algorithm. IEEE Access 2018, 6, 60100–60114. [Google Scholar] [CrossRef]
- Liu, Y.-F.; Cho, S.; Spencer, B.F.; Fan, J.-S. Concrete Crack Assessment Using Digital Image Processing and 3D Scene Reconstruction. J. Comput. Civ. Eng. 2016, 30, 04014124. [Google Scholar] [CrossRef]
- Morgenthal, G.; Hallermann, N. Quality Assessment of Unmanned Aerial Vehicle (UAV) Based Visual Inspection of Structures. Adv. Struct. Eng. 2014, 17, 289–302. [Google Scholar] [CrossRef]
- Nah, S.; Kim, T.H.; Lee, K.M. Deep Multi-Scale Convolutional Neural Network for Dynamic Scene Deblurring. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Noroozi, M.; Chandramouli, P.; Favaro, P. Motion Deblurring in the Wild; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Kupyn, O.; Budzan, V.; Mykhailych, M.; Mishkin, D.; Matas, J. DeblurGAN: Blind Motion Deblurring Using Conditional Adversarial Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Ramakrishnan, S.; Gangopadhyay, S.P.A.; Raman, S. Deep Generative Filter for Motion Deblurring. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Venice, Italy, 22–29 October 2017. [Google Scholar]
- Wen, T.; Lang, H.; Ding, S.; Lu, J.J.; Xing, Y. PCDNet: Seed Operation–Based Deep Learning Model for Pavement Crack Detection on 3D Asphalt Surface. J. Transp. Eng. Part B Pavements 2022, 148, 04022023. [Google Scholar] [CrossRef]
- Jiang, Y.; Han, S.; Bai, Y. Building and Infrastructure Defect Detection and Visualization Using Drone and Deep Learning Technologies. J. Perform. Constr. Facil. 2021, 35, 04021092. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Pang, J.; Huang, C. Evaluation of Transverse Cracks for Semi-Rigid Asphalt Pavements Using Deflection Basin Parameters. Transp. Res. Rec. 2019, 2673, 358–367. [Google Scholar] [CrossRef]
- Pais, J.; Santos, C.; Pereira, P.; Kaloush, K. The Adjustment of Pavement Deflections Due to Temperature Variations. Int. J. Pavement Eng. 2020, 21, 1585–1594. [Google Scholar] [CrossRef]
- Mamlouk, M.; Vinayakamurthy, M.; Underwood, B.S.; Kaloush, K.E. Effects of the International Roughness Index and Rut Depth on Crash Rates. Transp. Res. Rec. 2018, 2672, 418–429. [Google Scholar] [CrossRef]
- Piryonesi, S.M.; El-Diraby, T.E. Data Analytics in Asset Management: Cost-Effective Prediction of the Pavement Condition Index. J. Infrastruct. Syst. 2020, 26, 04019036. [Google Scholar] [CrossRef]
- Visintine, B.A.; Hicks, R.G.; Cheng, D.; Elkins, G.E. Factors Affecting the Performance of Pavement Preservation Treatments. In Proceedings of the 9th International Conference on Managing Pavement Assets, Washington, WA, USA, 18–21 May 2015. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Search Engine | String and Refinement | Results |
|---|---|---|
| Scopus | (TITLE-ABS-KEY (“crack detection” “deep learning”) OR TITLE-ABS-KEY (“crack detection” “MachineLearning”) OR TITLE-ABS-KEY (“crack detection” “road” “pavement” “concrete”) OR TITLE-ABS-KEY (“crack detection” “manual inspection”) OR TITLE-ABS-KEY (“condition assessment” “computer vision”)) AND PUBYEAR > 2009 AND (LIMIT-TO (SUBJAREA, “ENGI”) OR LIMIT-TO (SUBJAREA, “COMP”) OR LIMIT-TO (SUBJAREA, “MATE”)) AND (LIMIT-TO (DOCTYPE, “ar”) OR LIMIT-TO (DOCTYPE, “cp”)) AND (LIMIT-TO (LANGUAGE, “English”)) | 523 506 219 219 |
| WoS | TOPIC: (“crack detection” “deep learning”) OR TOPIC: (“crack detection” “Machine Learning”) OR TOPIC: (“crack detection” “road” “pavement” “concrete”) OR TOPIC: (“crack detection” “manual inspection”) OR TOPIC: (“condition assessment” “computer vision”) Timespan: 2010–2021. Indexes: SCI-EXPANDED, SSCI, A&HCI, CPCI-S, CPCI-SSH, BKCI-S, BKCI-SSH, ESCI. Refined by: WEB OF SCIENCE CATEGORIES: (ENGINEERING CIVIL OR CONSTRUCTION BUILDING TECHNOLOGY OR COMPUTER SCIENCE INTERDISCIPLINARY APPLICATIONS OR ENGINEERING MULTIDISCIPLINARY OR COMPUTER SCIENCE ARTIFICIAL INTELLIGENCE OR TRANSPORTATION OR MATERIALS SCIENCE MULTIDISCIPLINARY OR TRANSPORTATION SCIENCE TECHNOLOGY OR COMPUTER SCIENCE INFORMATION SYSTEMS OR ROBOTICS OR IMAGING SCIENCE PHOTOGRAPHIC TECHNOLOGY) AND DOCUMENT TYPES: (ARTICLE OR PROCEEDINGS PAPER) AND LANGUAGES: (ENGLISH) | 367 292 163 163 |
| Sum of the papers = 382 Duplicates = 99 Remaining 283 After applying Criterion 5 = 239 After abstract screening = 165 After full paper screening = 165 Total = 165 | ||
| Criterion | Inclusion | Exclusion |
|---|---|---|
| C1: (Publication Year) | 2010–2021 | Paper published before 2010 |
| C2: Language | English | Other languages such as Chinese, German |
| C3: Article Type | Journal and conferences | Books, conference review etc. |
| C4: Number of articles in the outlet | At least 5 publications | Less than five articles |
| C5: Deep Learning | Based on DL | Not based on DL |
| S/No | Scopus Source Name | Documents | Citations | S/No | Web of Science Source Name | Documents | Citations |
|---|---|---|---|---|---|---|---|
| 1 | Automation in Construction | 3 | 14 | 12 | Automation in Construction | 16 | 328 |
| 2 | Proceedings of SPIE The International Society for Optical Engineering | 5 | 45 | 13 | Computer-aided Civil and Infrastructure Engineering | 12 | 918 |
| 3 | SHMII 2019—Conference Proceedings | 3 | 6 | 14 | IEEE Access | 12 | 15 |
| 4 | Computer-aided Civil and Infrastructure Engineering | 3 | 955 | 15 | Journal of Computing in Civil Engineering | 7 | 86 |
| 5 | IEEE Region 10 Annual International Conference, Proceedings/TENCON | 3 | 4 | 16 | Structural Health Monitoring | 7 | 26 |
| 6 | ACM International Conference Proceeding Series | 7 | 8 | 17 | Construction and Building Materials | 8 | 326 |
| 7 | International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives | 3 | 15 | 18 | International journal of pavement engineering | 3 | 6 |
| 8 | Advances in Structure Engineering | 4 | 13 | 19 | Applied Science-Basel | 7 | 22 |
| 9 | Applied Sciences Switzerland | 3 | 10 | 20 | Materials | 3 | 4 |
| 10 | IOP Conference Series: Materials Science and Engineering | 3 | 1 | 21 | Structure Control Health Monitoring | 5 | 103 |
| 11 | Journal of Performance of Constructed Facilities | 2 | 7 | 22 | Journal of Transportation Engineering, Part B: Pavements | 2 | 4 |
| Assessment | Consideration | Scopus Outcomes | WoS Outcomes |
|---|---|---|---|
| Analysis Type | Co-occurrence | 666 | 346 |
| Counting method | full counting | - | |
| Units of analysis | all keywords | - | |
| Minimum Occurrence | 5 for Scopus, 5 for WoS | 39 | 32 |
| Keywords | Scopus Count | Web of Science Count |
|---|---|---|
| Crack Detection | 57 | 53 |
| Deep Learning | 55 | 54 |
| Convolution | 26 | - |
| Convolutional Neural Network | 20 | 14 |
| Convolutional Neural Networks | 20 | 6 |
| Deep Neural Networks | 17 | - |
| Neural Networks | 16 | 8 |
| Structure Health Monitoring | 15 | 5 |
| Damage detection | 13 | 29 |
| Concretes | 15 | 6 |
| Assessment | Consideration | Scopus Results | WoS Results |
|---|---|---|---|
| Analysis Type | Co-authorship | 227 | 331 |
| Method of counting | Full counting | - | - |
| Analysis units | Authors | - | - |
| Minimum Occurrence | Two for Scopus, two forWoS | 24 | 45 |
| Assessment | Consideration | Scopus Results | WoS Results |
|---|---|---|---|
| Type of analysis | Co-authorship | 122 | 115 |
| Counting method | Full counting | - | - |
| Units of analysis | Organizations | - | - |
| Minimum Occurrence | 2 for Scopus, 2 for WoS | 4 | 30 |
| Assessment | Consideration | Scopus Results | WoS Results |
|---|---|---|---|
| Type of analysis | Co-authorship | 22 | 18 |
| Counting method | full counting | - | - |
| Units of analysis | Countries | - | - |
| Minimum Occurrence | 3 for Scopus, 3 for WoS | 5 | 7 |
| Country | No. of Doc | Citations | No. of Doc | Citations |
|---|---|---|---|---|
| Scopus | Web of Science | |||
| China | 25 | 161 | 45 | 846 |
| The United States | 14 | 1018 | 25 | 1077 |
| South Korea | 10 | 135 | 15 | 81 |
| Canada | 6 | 964 | 10 | 313 |
| Japan | 2 | 1 | 4 | 130 |
| The United Kingdom | 2 | 8 | 1 | 0 |
| India | 1 | 0 | 1 | 2 |
| Taiwan | - | - | 1 | 2 |
| Australia | 2 | 8 | 2 | 3 |
| The Russian Federation | 2 | 0 | 2 | 130 |
| Singapore | 2 | 17 | 4 | 22 |
| Vietnam | 2 | 8 | 3 | 185 |
| Iran | 2 | 24 | - | - |
| Hong Kong | - | - | 2 | 130 |
| Italy | - | - | 2 | 7 |
| Dataset Type | Domain | Works | |
| Custom | Concrete | [2,20,21,22,32,33,36,37,38,39,43,44,45,48,49,60,62,63,67,69,71,73,75,84,85,87,89,90,91,93,97,105,107,108,110,112,117,118,119,121,126,127,130,133,141,142,146,149,150,151,152,153,154,155,156,157,158,159,160,161,162,163,164,165,166,167,168,169,170,171] | |
| Pavement | [20,40,41,42,47,65,77,78,79,80,88,92,100,109,113,125,131,133,135,137,143,172,173,174,175,176,177,178,179,180,181,182,183] | ||
| Other structures | [46,54,68,70,74,76,145,164,184,185] | ||
| Domain | Dataset Name | Works | |
| Public | Concrete | FCD | [161] |
| CCIC‘ | [1,106,136,186] | ||
| Xu’s dataset | [187] | ||
| DIV2K | [188] | ||
| SDNET | [35,60,65,97,119,189,190] | ||
| Özgenel’s | [65,97,119,189,191,192] | ||
| KrakNet | [69,100,133,190,193,194] | ||
| CCIC + SDNET + BCD | [50] | ||
| CFD + TITS2018 | [103] | ||
| CFD + Online search | [195] | ||
| SDNET + CCIC | [1] | ||
| LTPP + GAPS + APRDC | [196] | ||
| SDNET + Özgenel’s | [189] | ||
| KITTI + Cityscapes + CFD | [111] | ||
| CFD + AigleRN | [197] | ||
| Pavement | AEL | [123,190] | |
| Crack500 | [120,190,193] | ||
| CFTD | [124] | ||
| CLS | [96] | ||
| CFD Llamas | [103,198] | ||
| Stone331/GAPs384 | [193] | ||
| TRIMMD | [124] | ||
| CCD861 | [35] | ||
| CrackTree260 | [193] | ||
| EdmCrack1000 | [194] | ||
| Cracktree200 | [35,102,190,199,200] | ||
| EdmCrack600 | [95] | ||
| CFD | [35,44,99,102,124,151,193,194,200,201,202,203] | ||
| AigleRN | [27,40,49,104,203] | ||
| MCD | [204] | ||
| AIMCrack | [199] | ||
| CCD1500/CCD861/CCD861 | [35] | ||
| DeepCrack | [35] | ||
| PCD19/CRKWH1000/ | [193] | ||
| Dataset Type | Domain | Works | |
| Custom and Public | Concrete and Pavement | [24,35,83,97,98,101,164,168,170,188,197,200,205,206,207,208,209] | |
| Area/Domain | Number of Works | References |
|---|---|---|
| Pavement/Roads | 59 | [23,35,41,42,47,64,65,77,78,79,80,88,92,95,96,98,99,100,102,103,109,111,113,120,125,130,133,134,135,137,143,168,172,173,174,175,176,177,178,179,180,181,182,183,190,193,194,195,196,198,199,200,201,202,203,205,207,208] |
| Concrete | 65 | [1,2,22,24,32,33,37,38,40,43,44,45,50,53,60,61,62,75,80,83,86,87,91,93,97,101,106,107,108,110,112,116,117,118,119,121,124,130,133,135,136,141,142,146,150,152,153,154,156,158,161,164,166,167,169,171,186,189,190,191,192,197,204,206,209,210,211,212] |
| Bridges | 18 | [20,21,36,48,63,65,67,69,85,89,90,94,127,149,162,170,187,188] |
| Sewage Pipes | 5 | [73,75,84,159,163] |
| Tunnels | 9 | [39,41,71,105,126,155,157,160,165] |
| Masonry | 4 | [68,72,145,185] |
| Industry/Ceiling/ Nuclear Plant/ Glass/Dam/Rock Cliffs | 6 | [46,59,70,76,84,184] |
| Architecture | Works | Precision |
|---|---|---|
| DenseNet201 | [24] | NA |
| LeNet-5 + VGG16 | [35] | 91.20 |
| KrakN | [36] | NA |
| Inception V3/Inception V4 | [40]/[41] | NA/90.00 |
| GoogLeNet/GoogLeNet + CDN/GoogLeNet + ResNet | [38,39]/[99]/[45] | 98.72, 35.30/84.35/93.50 |
| ResNet/ResNet-152 | [33,40,42,43,44]/[46] | 98.90, NA, NA, NA, NA/90.0 |
| DBN | [61] | NA |
| R-FCN | [83] | 90.01 |
| 2D DIC + FRCNN | [86] | NA |
| YOLOv5x | [92] | 74.00 |
| ConnCrack | [95] | 96.79 |
| DenseCrack | [99] | 92.17 |
| RPN | [105] | NA |
| FCN | [46,100,105,106,116,117] | NA, 98.33, NA, 91.30, 89.30, 97.60 |
| U-Net/UNet-EB | [97,101,102,104,111,119,121,122]/[120] | 98.23, NA, 87.48, 40.44, 92.12, 96.52, NA, NA/57.50 |
| SegNet Bottleneck Depth-Separable Convolution With Residuals | [127] | 97.95 |
| Deep Crack | [130] | 86.60 |
| YOLO/YOLO + U-Net | [87]/[143] | 77.00/93.00 |
| CDDS | [146] | 80.31 |
| CrackNet/CrackNet II/CrackNet-v/CrackPix | [133]/[134]/[135]/[151] | 90.13/90.20/92.58/92.55 |
| SSD/SSDLite-MobileNetV2 | [76,77,78,79]/[154] | 81.06, 78.69, 19.45, 95.05/52.00 |
| ANet-FSM | [156] | 99.10 |
| MobileNet-v1 + ASPP | [160] | NA |
| YOLO-v3/YOLOv3-tiny | [33,74,88,89,90]/[91,92,163] | NA, 85.00, 73.64, 76.50, 66.20/98.00, 64.00, 85.37 |
| SegNet/CrackSegNet/SegNet-DCRF/FL-SegNet | [48,112,124]/[126]/[125]/[164] | , NA, NA, 82.0 /63.85/97.26 |
| Multilayer ELM-based crack detector MECD | [167] | 97.80 |
| RetinaNet/ SCHNet/ Cls-GAP Net APLCNet/Ci-Net/ ProposedNet /EfficientNet. | [80,172]/[94]/[96]/[98]/[103]/[109] [168] | NA, 85.80/NA/93.20/92.20/NA/ NA/82.30 |
| ResNet18 + YOLO_v2 | [171] | 89.00 |
| Edge detection + CNN-CDM | [176] | 1.00 |
| CAE | [178] | NA |
| FCN + GCRF + Uncertainty framework + probability-based rejection net | [179] | NA |
| RNN | [180] | NA |
| CNN (MobileNetV2)/CNN (AlexNet)/CNN (VGG-16)/ CNN (VGG-19) | [32]/[33,37,39,60,62,192]/[32,33,46,48]/[40,181] | 66.70/97.60, 98.72, 72.40, 92.36, 92.0, 99.0/55.60, 98.60, NA, NA, NA/90.0, 1.00 |
| PointCrack3D | [184] | 5.00 |
| Faster RCNN | [48,72,73,79,83,84,153,158,174,186] | 80.00, 95.00, 91.58, 26.45, 83.0 83.0, NA, 87.80, 66.89, NA, |
| SSENets/CrackU-Net/U-CliqueNet | [155]/[175]/[187] | 86.30/NA/95.45 |
| SrcNet | [188] | NA |
| CMDNet/TernausNet/Spiral Net/LDCC-Net/RRCE-Net/RAO-UNet | [161]/[166]/[170]/[181]/[185]/[189] | 98.90/78.44/99.28/98.32/81.90/NA |
| Xception | [191] | NA |
| CCapFPN | [193] | 91.40 |
| DCNN | [20,21,23,39,47,49,50,54,62,63,64,65,67,70,75,136,137,162,165,180,182,183,194] | NA, 97.90, 90.0, 88.30, 99.70, NA, NA, 89.60, 92.0, 93.10, 99.60, 13.10, NA, NA, 80.60, NA, NA, NA, NA, NA, NA, NA, 91.00. |
| Mask R-CNN using Detectron2′s /Mask RCNN | [113]/[71,85,107,110,111,141,173,195] | 95.00/ NA, 66.0, 90.40, 90.0, NA, NA, 96.32, NA |
| YOLOV4/YOLOV4-FPM | [93,149]/[196] | 94.09, 97.60/78.00 |
| CCA + CRA | [197] | 83.40 |
| Encoder-decoder + SWM | [199] | 67.20 |
| ICGA | [198] | 89.33 |
| SSGN | [200] | 33.55 |
| U-HDN | [201] | 94.50 |
| Deep Residual Net | [202] | 93.57 |
| CNN + ASPP CDDS / CNN + SVM/ CNN with U-Net and FPN/ CNN with PAN | [53,69,145,204] | 78.11, NA, 95.30, 81.30 |
| RCNN + CNN | [205] | NA |
| GAN | [207,208] | 89.70, NA |
| FRCNN + FPN/FRCNN + TuFF + DTM/FRCNN-FED/FRCNN-Inception-ResNet-v2 | [83]/[85]/[142]/[209] | 92.11/78.00/95.00/60.80 |
| Customized CNN | [1,2,22,68,177,190,210] | 97.30, 99.60, 98.90, 82.00, NA, NA. |
| MALSSS | [211] | 98.17 |
| FF-BLS | [212] | 99.90 |
| Structure | Dataset Size | Precision (%) | References |
|---|---|---|---|
| Concrete | <10,000 | 95–100 | [2,97,127,142,149,156,161,170,187] |
| 90–95 | [63,83,91,98,106,107,110,150] | ||
| 85–90 | [74,89,101,157,158,163,171,207] | ||
| 80–85 | [48,73,75,84,106,117,130,146,168,197] | ||
| 75–80 | [53,85,87,164,206] | ||
| <75 | [32,39,90,126,154,169] | ||
| Concrete | >10,000 | 95–100 | [1,33,37,38,121,167,192,212] |
| 90–95 | [21,35,45,60,62,93,116,151] | ||
| 85–90 | [103,204] | ||
| 80–85 | [22,152,165] | ||
| 75–80 | [178] | ||
| <75 | NA | ||
| Pavement | <10,000 | 95–100 | [95,113,175,176,181,193,201,203] |
| 90–95 | [23,35,92,134,135,143,194,199,201] | ||
| 85–90 | [130,133] | ||
| 80–85 | [124,135,174,178] | ||
| 75–80 | [77,196] | ||
| <75 | [65,79,102,120,123,199,200] | ||
| Pavement | >10,000 | 95–100 | [47,64,78,100,125,173] |
| 90–95 | [40,180] | ||
| 85–90 | NA | ||
| 80–85 | NA | ||
| 75–80 | NA | ||
| <75 | [88] | ||
| Other structures | < & >10,000 | 95–100 | [72,185] |
| 90–95 | [96] | ||
| 85–90 | NA | ||
| 80–85 | [68] | ||
| 75–80 | NA | ||
| <75 | [184] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, L.; Alnajjar, F.; Khan, W.; Serhani, M.A.; Al Jassmi, H. Bibliometric Analysis and Review of Deep Learning-Based Crack Detection Literature Published between 2010 and 2022. Buildings 2022, 12, 432. https://doi.org/10.3390/buildings12040432
Ali L, Alnajjar F, Khan W, Serhani MA, Al Jassmi H. Bibliometric Analysis and Review of Deep Learning-Based Crack Detection Literature Published between 2010 and 2022. Buildings. 2022; 12(4):432. https://doi.org/10.3390/buildings12040432
Chicago/Turabian StyleAli, Luqman, Fady Alnajjar, Wasif Khan, Mohamed Adel Serhani, and Hamad Al Jassmi. 2022. "Bibliometric Analysis and Review of Deep Learning-Based Crack Detection Literature Published between 2010 and 2022" Buildings 12, no. 4: 432. https://doi.org/10.3390/buildings12040432
APA StyleAli, L., Alnajjar, F., Khan, W., Serhani, M. A., & Al Jassmi, H. (2022). Bibliometric Analysis and Review of Deep Learning-Based Crack Detection Literature Published between 2010 and 2022. Buildings, 12(4), 432. https://doi.org/10.3390/buildings12040432