1. Introduction
The maintenance and rehabilitation of in-service pavements are pivotal activities of transportation engineering. The importance of maintaining functioning, comfortable and safe transportation networks reside in the fact that the economic and social growth of a country depends heavily on the health of its transportation network. Maintenance and rehabilitation (M&R) activities are usually planned based on the quality of the pavements, both at functional and structural levels.
Many countries and infrastructure agencies have their own pavement management system (PMS) to support decisions on when to intervene to maintain or rehabilitate the pavement of a segment of the infrastructure network. However, the state of the pavement quality of a network on which this PMS is based is still monitored by processes that have been established for a long time, and strongly depend on acquired experience.
The application of new smart technologies, such as internet of things (IoT), sensorization, and artificial intelligence (AI), has the potential to transform transportation engineering into a smarter and more efficient field, while simultaneously contributing to more sustainable development, meeting the goals established by the United Nations [
1,
2]. The PMS could be improved by applying these new smart technologies to their decision support systems, not just by updating their data collection methodologies, but also their data analysis tools. The application of these smart technologies to the field of pavement monitoring and condition evaluation will undoubtedly contribute to more efficient, less costly, safer, and environmentally friendly methodologies and processes that will bring significant societal and economic benefits.
Smart pavement is a concept that is increasingly referenced in academic publications, though its definition is slightly sparse among researchers. Even though smart pavement is a broad concept, an advantage of these kinds of new, digital era pavements is their capacity to monitor their structural and functional health in real time by means of sensorization.
Even though in practice, infrastructure agencies are still dependent on conventional methods that are either costly or based on lengthy processes, the literature reveals that many researchers are exploring new approaches to detect and predict the state of a pavement by means of low-cost and easy-to-implement technologies. Thus, the aim of this paper is to carry out a comprehensive review of the approaches and methodologies which promote the development of smart pavement systems, with the capability of generating and analyzing data so as to provide the foundation for effective decision support systems (DSSs).
The remainder of the paper is organized as follows.
Section 2 explores concepts such as smart pavement and how it can be integrated toward the improvement of the current PMS. In
Section 3, the main research questions are presented, together with the methodology followed for the literature review, as well as a statistical analysis of the results. According to this literature review methodology,
Section 4 and
Section 5 then detail the existing data collection and data analysis methods, respectively. Finally, conclusions are drawn in
Section 6, followed by an analysis on future trends and recommendations.
2. The Role of Smart Technologies in Current Pavement Management Systems
PMSs can be considered decision support systems that aid infrastructure agencies in the planning of M&R actions to maintain a functional and safe network. The most important output of a PMS is the generation of an M&R action plan, which is achieved by applying decision support tools that usually take into consideration the minimization of costs of M&R actions to maintain an acceptable network condition. These decision support tools receive as input the present quality of the pavement and the financial resources available and output the M&R plan. However, the effectiveness and efficiency of these decisions made by the PMS highly depend on the quality of the input data that the decisions are made upon. In turn, the quality of the data depends on the considered method of collection and data analysis, which means that, for instance, a data collection method based on subjective criteria may compromise decision making. Thus, the type of adopted data collection and analysis methods not only influences the quality of the data, but can also improve the time and cost of the process of data collection and treatment [
3,
4].
Currently, the PMS in use by infrastructure agencies still depends on empirical methods of pavement condition evaluation and manual techniques of data collection. These agencies are held down by data collection methods that are either subjected to an engineer’s experience-based evaluation or slow-moving automated processes that are only scheduled sporadically, due to the inconveniences and high cost normally associated with these methods. The most used methods of data collection, namely for surface distress evaluation, are visual inspections, either on foot (walking surveys) or by driving along the shoulder at lower speeds (riding surveys also known as windshield inspection). The ensuing data are translated into reports based on subjective evaluations, photos or videos and manual measurements taken during these inspections. For structural and roughness evaluations, the agencies usually own dedicated vehicles equipped with special sensors, such as inertial profilers, deflectometers, ground-penetrating radar, infrared thermal imaging, and laser technology. Although automatic, these methods take a significant amount of time, depend on costly equipment, and sometimes disturb the normal traffic flow. In general, issues arise not because of the lower efficiency of these methods to monitor the pavement condition, but because of the long periods between evaluations, reducing the efficiency of the whole monitoring system and potentially compromising the decision-making process. Thus, ample room for improvement exists in what concerns both data collection and analysis methods that comprise DSS for pavement management.
In the new industrial revolution—Industry 4.0—marked by the emergence of new technologies capable of automating and optimizing processes, the “smart” concept has gained increasing attention. In both industry and academic worlds, the concepts of smart city and smart home are examples of well-established and advertised terms. However, the concept of smart road or smart pavement is not as well defined or disseminated. Some authors considered that smart road includes four main features [
5,
6]. According to Pompigna and Mauro [
6], smart roads should be capable of the following: learn with and assess itself (by monitoring its conditions in real time); adapt to the circumstances of the road (for instance, cracking or icing); interact with other intelligent devices (such as vehicles) and connect to databases of maintenance systems through a communication system; and feed themselves by supplying green energy. Throughout this paper, the term smart pavement was adopted to drive the focus to smart technologies applied to the pavement in view of automating its monitoring, as opposed to other smart road components and features, such as those related to energy and communication for instance [
5].
Ultimately, the decisions made by these systems are not just affected by the chosen methods of data collection, but by the data analysis methods as well. Many researchers have focused on the analysis of smart data collection methods applied to pavement monitoring, such as unmanned aerial vehicles (UAV) [
7], probe vehicles (basically vehicles equipped with sensors) [
8], smartphones [
9], and embedded sensors in the pavement [
10,
11,
12]. Many other state-of-the-art works that explore data analysis methods as well have mainly focused on just one type of functional distress (such as cracking or surface irregularity measurement) [
7,
8,
13] or in structural evaluation [
11]. Yet not many surveys make the bridge between smart data collection methods and data analysis methods also based on new intelligent techniques, which are suited to be a part of DSS for smart pavements.
With the possibility of gathering a significant amount of varied data (including real-time data) it becomes advantageous to use AI techniques, such as machine learning (ML), to extract knowledge from this information, allowing for the detection and prediction of pavement conditions. Image processing is also increasingly adopted to detect various types of surface distresses. The work by Peraka and Biligiri [
4] evidenced the significance of the link between both data collection and data analysis methods as decision support tools dedicated to pavement management. However, their analysis of the current state-of-the-art focuses solely on the monitoring of the pavement’s functional condition (i.e., detection and prediction of surface distresses or estimation of roughness indicators), while disregarding the potential of an in-depth analysis of a broader DSS concept capable of taking into consideration the developed tools for both functional and structural monitoring of pavements.
Therefore, future DSSs for pavement management would benefit from integrating smart data collection and data analysis techniques for both functional and structural evaluations. This integrated approach could result in a decrease in both cost and resource usage associated with the maintenance and monitoring plans of infrastructure agencies without significant reductions in efficiency when compared with current systems and techniques in use.
Figure 1 depicts a DSS as such, including the currently available smart data collection methods and the levels of analysis that were studied for both functional and structural pavement characteristics.
Thus, this paper aims to fill this literature gap, covering both data collection methods, analysis techniques and decision support tools applied to the pavement management and maintenance field that can be found in the literature. Simultaneously, a distinction is delineated between which tools and methods are applicable to the two most crucial pavement condition levels: functional and structural. The main drive of the present work is to provide insight for the development of future decision support systems for smart pavement management. Indeed, future DSSs need to be capable of collecting and analyzing data at different levels, both externally at the surface or inside the pavement, as well as detecting and predicting all types of functional and structural flaws and defects. The narrative followed by this work is, thus, represented in
Figure 1, which depicts the two main components of a DSS and how they fit in a smart pavement environment: data collection methods, and data analysis and decision support tools.
3. Research Methodology
Research Questions
The aim of this work is to identify and assess the new smart technologies applied to pavements that can provide the foundation for a more efficient and effective DSS comprised of data collection and analysis modules for the monitoring of the pavement state. Hence, three research questions (RQ) were identified as guidelines to the research approach, namely, the following:
RQ1—What smart technologies are being utilized to monitor pavement condition? (
Section 4)
RQ2—Which methods of data processing and analysis are most commonly applied to the collected data and which ones have shown greater efficiency? (
Section 5)
RQ3—Are there any decision support tools that integrate both data collection and data analysis methods?
RQ4—Are there any PMS capable of simultaneously monitoring both structural and functional conditions of pavements?
The research methodology implemented in this review is summarized in
Table 1 and divided into three phases. In order to identify both the DSSs that have already been developed and simultaneously the works mainly based on data collection or data analysis methods, the first phase consisted of a wide search with broad keywords, such as “smart”, “pavements”, “decision support system”, “monitoring” and “management”. Words such as “road”, “transportation” and “infrastructure” were not considered to avoid works based on mobility, automated and connected vehicles, or monitoring of other type of infrastructures. From this first attempt, a poll of 1969 papers from peer-reviewed journals, reviews and conferences papers were obtained. These data were surveyed in September 2021 in referenced scientific databases, namely Elsevier Scopus, Science Direct, Springerlink Journals, Taylor&Francis online, IEEE Xplore and Google Scholar. Common boundaries were taken into account throughout this first phase to restrict the search, shown as follows:
This review focuses on peer-reviewed scientific journals, conferences, and proceedings papers.
In spite of the fact that the first papers that resulted from the query of the first phase of the research date back to the 1990s, the period considered for the search was limited to the period between 2015 and 2021, due to a bigger manifestation of relevant papers in the past 5 years.
This first poll of papers then went through an analysis of significance, firstly in function of their title, followed by an assessment of the abstract. This allowed the literature review process to filter a significant amount of works from areas that were beyond the topic of this paper but were still output by the keyword search, such as mobility and logistics, or smart vehicle communication and automation. Then, the most relevant papers resulting from that selection went through a more thorough content analysis. This process of selection was carried out by two researchers by following the previously stated rules and the concept of DSS for smart pavements exposed in the preceding section. Between each phase, the researchers discussed and combined their findings and selected papers. It is important to remark that, while analyzing the content of the selected papers, cited references were also considered a secondary source for which the corresponding numbers are depicted in
Table 1. These additional references were also subjected to the aforementioned boundaries concerning the publication type and year of publication.
The content of the papers was assessed by conducting a descriptive analysis on the distribution across the considered time interval, the distribution by category, and then a geographical distribution by continent.
Figure 2 and
Figure 3 represent the distribution of publications throughout the considered time interval for embedded and external methods regarding data collection and functional and structural analysis considering data analysis methods. It is important to note that not all papers explore both data collection and data analysis methods in the same work. Therefore, the number of articles in both figures slightly differ, as some works figure in both graphs, while others are only represented in one of them. By analyzing both distributions simultaneously, we can infer their similarity and growing trend. Even though the application of smart technologies to pavement maintenance was already explored widely in the past, including earlier than 2015, these distributions still show a significant growth concerning the interest on the topic at hand in the past 5 years, peaking around 2020 with around 60% of the publications occurring after 2019. Another aspect of note is concerned with the fact that, for 2021, a significant amount of works was already published up until September 2021, demonstrating the increasing interest in these topics.
Regarding the geographical distribution represented in
Figure 4, the continents that most contributed to these topics for the past five years correspond to Asia, followed by Europe and only then by North America. The biggest contributors in these top three continents are China, U.S.A., and Italy.
4. Data Collection Methods
4.1. General Aspects
Bearing in mind the first research question of this analysis (RQ1),
Table 2 categorizes the works that explore smart data collection methods and monitoring technologies that could integrate a DSS for smart pavement management. Most of these works focus only in one type of data collection, either external or embedded.
Smartphone-based approaches seem to be the most explored, due to the popularity of these devices, together with their widespread availability and ease of use. Regarding UAV applications, despite the fact that fewer papers were retrieved on this specific topic, the survey includes a comprehensive review paper analyzing the applications of UAV to road safety, traffic and highway management [
7]. According to the classification shown in
Table 2 and supported by
Figure 1, the topic which still seems to be the least explored is related to the use of embedded sensors on the pavement surface.
Regarding external data collection methods, these are often associated with a type of dynamic monitoring featuring a long-span capacity of collecting data associated with extensive network sections. Most of these methods leverage on vehicles equipped with sensors being the most common among cars and UAVs. Sensors can either be installed and mounted on these vehicles or included in smartphones as built-in sensors. Generally, these external methods focus either on the detection of surface distresses (such as potholes and cracks) through the analysis of acceleration data, image processing and/or acoustic signals, or on the evaluation of the surface condition by the estimation of pavement condition and performance indexes also by means of acceleration.
Taking smart wireless sensor networks into account as embedded methods, this type is usually associated with a local and static pavement structural health monitoring. Conventional non-destructive methods (such as falling weight deflectometer—FWD) that seek to measure and evaluate pavement structural health mainly reflect the distress conditions of the pavement surface, rather than the internal stress/strain state and structural degradation of the pavement, as they are unable to detect micro-damage and track its development. This comprises one of the main drives for the study and implementation of embedded smart sensor networks. The latter consist of a set of sensors, called nodes, that usually are integrated into a new structure during construction, or alternatively integrated at the surface of an already existing one to monitor a particular event or measure a certain parameter continuously in real time [
11].
4.2. External Methods
4.2.1. Smart Probe Vehicles
In this analysis, this category considered vehicles equipped mainly with low-cost sensors and used in frequent monitoring actions, as opposed to the conventional vehicles used by infrastructure agencies, equipped with high-accuracy and expensive sensors which monitor the network periodically. The works that resorted to these smart probe vehicles focus either on image-based collection methods [
28,
29,
30,
32,
36], or accelerometer, microphones and global positioning system (GPS) sensors for international roughness index (IRI) estimation and crack detection [
28,
31].
Wang et al. [
28] proposed a multi-modal sensor system that can be installed in any type of vehicle and is capable of collecting both surface- and subsurface-related information by means of several types of sensors, ranging from acoustic, to optical, electromagnetic and GPS. The developed system was presented as a non-intrusive, affordable solution that does not require experts to conduct the data collection. The acoustic sensors (microphones) were used to quantify the “macrotexture depth” of the pavement (which is an indicator of roughness). A dynamic tire pressure sensor (DTPS) and an accelerometer were used to estimate IRI. Cameras were adopted to take images of the pavement for crack detection and identification. Lastly, ground-penetrating radar (GPR) was used to assess the asphalt thickness and electromagnetic properties. GPR technology is also sometimes used to detect the presence of cracks and cavities [
34].
While both Zhang et al. [
29] and Chatterjee et al. [
30] used a system based on cameras and GPS for image processing to detect surface cracks on the pavement [
33,
37], Chen et al. [
31] resorted instead to the collection of acceleration and audio signals to detect cracks. Acceleration data were collected by both a smartphone built-in sensor together with an accelerometer mounted on a car wheel frame, and an audio signal was collected by a voice recorder. At the same time, pavement images were obtained by a camera mounted on the car, which were then used as a ground truth for the estimation model. Nguyen et al. [
35] developed a system that also collected acceleration data through an IoT device placed outside the vehicle, and which also integrated a gyroscope and GPS signal receivers. The recorded variations of vibration were then used in a visualization tool that represented the quality of the network surface.
Despite already being used for surface distress detection, laser scanning technology can also be considered a smart technology capable of supporting automation, and thus simplify the process of collecting point cloud information to build a tri-dimensional (3D) model of the pavement surface [
32].
4.2.2. Smartphone-Based Methods
Current smartphones typically include built-in sensors, such as accelerometers, gyroscopes, and GPS, besides microphones and cameras with increasing quality, thus comprising useful tools to monitor pavement performance and surface condition. Many researchers have studied the application of smartphones to monitor pavement condition since this method can present itself as a low-cost real-time data collection alternative to current monitoring methods used by infrastructure agencies [
9]. A smartphone-based method is not only capable of gathering reliable data, but it also facilitates real-time monitoring of the entire network. Methods of data collection based on smartphone accelerometer and GPS readings are the most common. Most studies of smartphone-based data collection methods either focus on pavement performance evaluation and estimation of pavement quality indexes [
16,
17,
19,
20,
21], or on anomaly detection [
15,
18], with a prominent focus on pothole identification. While built-in accelerometer sensors are the most used in smartphone-based systems [
14,
15,
16,
20,
22,
23,
24,
26,
27], there are systems that use cameras [
18,
25] and microphones as data collection methods.
Aleadelat et al. [
16] resorted to a smartphone accelerometer and GPS to evaluate pavement condition through the estimation of present serviceability index (PSI). More precisely, they proved that the variance of the acceleration data obtained by smartphones could work very effectively as independent variables to estimate PSI. In turn, PSI depends on indicators, such as international roughness index (IRI) [
17,
19], pavement condition index (PCI), and pavement rutting as explanatory variables. The difference between the predicted and the actual PSI values was not statistically different, but it is a model that is highly dependent on the smartphone used and type of vehicle.
Souza et al. [
20] also resorted to smartphone acceleration data and GPS to assess pavement quality. To achieve this, the authors defined their own pavement condition classification (good, average, fair, poor and obstacle) according to the degree of comfort or discomfort experienced by a road user.
Bearing in mind the methods focused on anomaly detection, Seraj et al. [
15] adopted smartphone GPS and inertial sensors (accelerometer and gyroscope) to detect pavement anomalies, which are classified in groups, such as transversal, mild and severe road anomalies. Transversal anomalies included intentional road elements, such as speed bumps and joints. Mild anomalies included crocodile cracks, patched roads, tree roots, sunken manholes, or raveling. Lastly, severe anomalies ranged from potholes to severe road deteriorations.
Considering the pervasiveness of smartphones, some studies focused on the conceptualization of crowdsourcing base monitoring systems. Chuang et al. [
22] proposed and conceptualized a participatory smartphone-based system to evaluate pavement performance through the analysis of both vertical and lateral acceleration retrieved from smartphone accelerometers. Instead of attempting to estimate IRI, this work established a novel pavement performance index (PPI) that could provide infrastructure agencies with information regarding the network stretches with a worse performance, on which IRI estimation procedures can then be carried out by equipped vehicles. Rather than replacing IRI as an assessing indicator, this novel index intended to assess and label road anomalies to optimize labor- and time-associated costs in a network.
4.2.3. Unmanned Aerial Vehicles
As for data collection methods resorting to UAV, these have mainly focused on pavement distress recognition obtained by image processing, with cracks and potholes being the most common detected distresses [
7]. To realize a UAV-based monitoring system, the most employed equipment for the detection of surface distresses is either high-resolution cameras [
38,
40,
41] or light detection and ranging (LiDAR) systems, which generate point cloud data [
39]. By resorting to high-resolution cameras, surface distresses can either be detected by analyzing 2D images [
41], or by generating 3D models of the pavement surface by applying structure-from-motion (SfM) techniques [
40].
Chansamorn et al. [
39] tested the feasibility of a low-cost LiDAR-equipped UAV system to monitor road surface conditions. The effect of elevation and tilt angle in LiDAR-equipped UAV measurements was thoroughly explored to define the flight parameters that minimize measurements failures.
With respect to some barriers concerning the application of UAV, Outay et al. [
7] identified the most critical restrictions to the use of drones, including those figuring in airspace regulations as dictated by each nation’s space monitoring agencies. Besides these, restrictions at the operation level of drones speculate that these can only be used under the visual line of sight of the operator. Other restrictions are related to weight, equipment (sensors and cameras), day-only operations, the need for professional training and certification to operate these UAV, registration of the drone, and prior permission for using the air space.
4.3. Embedded Methods
In this analysis, a distinction was made between sensors embedded into the pavement [
46,
47,
48,
49,
50,
51,
52] and those applied directly on the pavement surface [
42,
43,
44]. These monitoring systems focus either on the monitoring of the propagation of concealed cracks [
42,
43,
46,
48], or on the estimation of structural capacity [
47,
49,
50,
51,
52,
57] influenced by pavement parameters that can be measured by specific sensors, such as strain, temperature, or moisture gauges. Nevertheless, embedded methods are not exclusive to the monitoring of structural condition, as these systems have also been used to monitor functional aspects. In this line of work, Bi et al. [
44] developed an optical fiber-based monitoring system for tracking the water membrane thickness on the pavement surface, which has a relevant impact on user safety as a consequence of potentially affecting the pavement skid resistance.
Ma et al. [
49,
54] presented a framework to estimate the modulus of asphalt layers by monitoring stress and strain responses measured by a fiber optic sensor (fiber Bragg grating sensors—FBG). This framework was tested in the field, and the sensors were embedded at the bottom of the second asphalt layer. On the other hand, Wang et al. [
50] presented a sensing technique based on the simultaneous application of two types of optical fiber sensors: FBG for point and local detection with high precision, and Brillouin optical fiber for distributed monitoring with relatively low precision. While the former was able to detect local deformation, local cracks and shrinkage, the latter was employed to measure the global mechanical properties and global deformation. When it comes to rigid pavements, optical fiber sensors were also used to monitor thermal curling of concrete pavement slabs [
56] and concrete pavement support conditions [
55]. Since one of the main concerns with embedded wireless sensors regards their energy supply, piezoelectric transducers are seen as a good alternative for continuous pavement health monitoring on account of the capacity of both damage diagnosis, and for supplying power to themselves from traffic loads. Alavi et al. [
46] focused on finding a correlation between the distribution of strain measured by piezoelectric transducers and damage progression, such as bottom-up crack propagation. It was found that damage progression can be considered a function of probability density function parameters obtained from the strain distribution. Correspondingly, Ji et al. [
53] conceived a self-powered damage-detection aggregate (SPA) comprising a piezoelectric vibrator. The encapsulation thickness and vibrator size were tuned to obtain the best results in the detection of concealed cracks. Contrary to the application of piezoelectric transducers to measure strain by Alavi et al. [
46], Ji et al. [
53] resorted to the principle of acoustic wave attenuation to detect and measure cracks width. When a SPA driver is excited, it generates an acoustic wave which propagates through the pavement until it reaches an SPA receiver. In the presence of concealed cracks, the received signal, and the coefficient of the acoustic wave attenuation change, the latter is reduced as the crack width increases.
As mentioned, one of the drawbacks of embedded sensors is that they are either installed during construction of new pavements or during rehabilitation interventions. Conversely, the method proposed by Hasni et al. [
43] accounted for the application of sensors on existing pavements by placing the sensors on the surface instead of inside the pavement layers. The self-powered wireless surface sensing approach made use of piezoelectric transducers to detect bottom-up cracking. Another work that explored a method for detection of cracks inside the pavement was developed by Fedele et al. [
42] and Cafiso et al. [
45], which resorted to microphones placed on the pavement surface to record its vibro-acoustic signature. Since the propagation of both vibration and sound is, among others, a function of the proprieties of the material, this method is based on the hypothesis that, in the presence of cracks, the stiffness of the pavement decreases, resulting in a reduction in the wave transmission capacity of the material.
New developments have also addressed the implementation of self-sensing smart composites comprised of the inclusion of piezoresistive and conductive materials in the formulation of new pavements [
58,
59]. Contrary to embedded sensors inside the pavement, this approach presents itself as a solution to some of its drawbacks, such as energy supply, sensor durability and possible impacts in the performance of the pavement itself. Obvious drawbacks are concerned with the fact that these novel materials must be added to the materials during construction, which, besides the increased cost and quality control requirements, may in some cases modify the mechanical behavior of the final pavement.
5. Data Analysis and Decision Support Tools
5.1. General Aspects
When it comes to evaluating pavement condition data, this topic is usually subdivided into functional and structural condition evaluation. While the former is the more common and aims to define the quality of the pavement surface regarding the user’s comfort and safety, structural evaluation seeks to define the mechanical response of the pavement, taking into account the effects of traffic and climatic conditions [
60]. Typically, most PMS initially focus on the functional condition assessment of pavements, while the structural evaluation is carried out only when required. Conversely, the capability of smart pavements to constantly monitor both functional and structural aspects can present itself as a solution for this problem.
Following the survey of data collection methods in the previous section, the natural follow-up topic comprised the study of the most efficient processing and analysis methods applied to the data collected by the methodologies in
Section 4 (RQ2). To achieve this goal, a survey of data analysis methods was carried out by assessing existing developments pertaining to smart decision support tools capable of advising the infrastructure agencies on the condition of the pavement, both at a structural and at a functional level.
Table 3 identifies some of the works that were developed in this regard and divides them into functional and structural analyses.
One of the focal points of functional analysis is the evaluation of the pavement surface quality. Since this analysis is usually carried out in a two-fold action, starting with the identification of surface distresses followed by the determination of quality indexes, the functional category was sub-divided into a second level. This sub-division aimed to distinguish the data analysis methods that focused on the identification and classification of surface distresses, such as superficial cracks [
28,
29,
30,
33,
40,
62,
63,
64,
65,
66,
67], potholes [
25,
32,
36], patches [
18], and others [
37,
41], and the estimation of pavement quality indexes, such as IRI [
17,
19], PCI [
16] and other indexes proposed by some researchers [
20,
22,
23,
27,
68]. These sub-categories were, in turn, divided into the type of adopted approach, either image processing or data-driven models for the case of identification and classification of surface distresses, and model-driven or data-driven for the estimation of pavement quality indexes.
Regarding the structural category, it was also divided into two distinct sub-categories related to the main focus of the systems under analysis. The works were divided into those that focused on the identification of fatigue cracking [
42,
43,
46,
48,
50,
53], most commonly bottom-up cracks, and the estimation of pavement layers’ elastic modulus and the prediction of mechanical response [
34,
45,
49,
51,
52,
54,
55,
56], which are intrinsically related.
5.2. Functional Evaluation
5.2.1. Identification and Classification of Surface Distresses
The two most commonly used data types for the identification and classification of surface distresses are image and acceleration data. Concurrently, the most common methods for the analysis of the subsequent data are image processing techniques and data-driven models, applied individually or in tandem with each other.
Image processing methods and techniques are mostly used for (but not limited to) the detection of surface distresses, such as cracks and rutting [
28,
29,
30,
33,
37,
41,
62,
63,
64,
66,
67,
68], potholes [
25,
32,
36,
37,
41,
68] and patches [
18,
37]. As mentioned in the previous section, image-based collection methods, which usually resort to high resolution cameras, have been widely studied. The images captured by those cameras can be processed as two-dimensional (2D) images for distress detection [
18,
25,
30,
32,
33,
36,
37,
41,
62,
63,
64,
65,
66,
68], or used to generate 3D models of the pavement, aiming to assess the surface roughness [
61], deformation levels [
40] or patch depth [
32]. A common step among image processing methods is image segmentation, which involves dividing the image in smaller sections based on certain features and characteristics, culminating in the isolation of the pavement distress that is intended to be detected.
Zhang et al. [
29] proposed a crack detection system based on an adaptive threshold image segmentation method and a region growing algorithm applied to grayscale pavement images. This methodology takes into account crack features, such as spatial distribution, intensity, statistical, geometry and orientation to separate crack pixels from the background. The dependency on the grayscale intensity of pixels had a direct limitation when it came to detect cracks that do not have an obvious grayscale intensity difference when compared with their surrounding area. Therefore, the authors suggested the combination of depth information with intensity features so as to detect cracks when the difference in the level of intensity is not significant.
When it comes to generating 3D models to assess the road surface conditions, these can be generated from 2D images taken from the field by applying SfM modeling techniques, while simultaneously using image segmentation to isolate the pavement distresses. In this context, Roberts et al. [
40] used drone images to generate a 3D model of pavement sections in order to monitor and analyze pavement surface conditions. In this study, the condition of the pavement for each analyzed section was determined by a statistical metric representing the average level of distress of that section. This metric was obtained by using a statistical analysis of the deviations between the model and a reference plane. The authors also evidenced the relevance of their process to aid road managers in deciding an intervention plan based on the section surface condition translated from the value of the used metric.
For the purpose of distress identification and classification, the most used methods typically integrate image-based techniques with data-driven models. This kind of process usually starts with image processing and segmentation to extract a set of features, which are then subsequently used to train machine learning models. Convolutional neural networks (CNN) are well-known machine learning methods usually applied in image detection systems, such as these ones. Hence, the majority of the systems described herein applied variations of CNN [
25,
32,
33,
36,
63,
64,
65,
66,
67], such as YOLO (you only look once) [
41,
68] or U-NET [
37,
68] architectures. Apart from CNN, though not as common, random forest [
18] and support vector machine (SVM) [
30,
62] machine learning methods were also successfully used for distress detection.
Hadjidemetriou et al. [
18] focused their work on the detection and quantification of patches by applying a SVM classification model to video frames. In this study, each frame was firstly divided in blocks of 20 × 20 pixels, which were classified as patch or no-patch blocks by the SVM model with an accuracy of 87.3%. Subsequently, this block classification was used to categorize each frame as including patches or not, which in turn was achieved by defining a threshold of connected patch blocks.
Weng et al. [
62] proposed a segment-based method to measure crack width. The process behind the developed method can be divided in five main steps. First, a crack edge confidence map was obtained by applying random forest machine learning based on features such as the commonly used grayscale intensity, coupled with a newly identified feature: the curved structure of cracks. This new feature was important to identify hairline cracks, whose intensity is not enough to distinguish them from the background with certainty. Based on the crack edge confidence map, the crack skeleton, which characterizes the propagation of the crack, was extracted, broken down into individual crack curves and then partitioned into crack segments whenever the crack curvature exceeded a defined threshold. Lastly, the crack length can be obtained by adding the crack segment lengths. Since the crack width was considered to be constant for each segment, the final width corresponded to the distance between the two crack edges of a segment.
The system developed by Rateke et al. [
37] was capable of assessing several characteristics of a road, combining the identification of surface type (asphalt, paved and unpaved) with the detection of surface distresses, such as potholes, cracks, and patches, among others. In order to attain accurate detections of both pavement surface types and surface distresses, the approach consisted of training a CNN model to perform semantic segmentation by applying a U-Net architecture. Firstly, the model was trained without the use of weights in the classes to easily identify the surface type. Secondly, this model was used as pre-training for a second model with the application of balanced weights. The second model produced better results in detecting road defects. However, this method overly simplified the distress classification since it leaned on the assumption that any distress that does not fall within the classification of potholes and patches must be classified as cracks, which may not always necessarily be true.
Wu et al. [
32] proposed a new algorithm for pothole detection which integrates 2D and 3D image processing techniques. First, a semantic segmentation CNN model was applied to 2D images to extract candidate potholes which were then generated into 3D models via point cloud information obtained from a laser scanner. Then, the candidate potholes were verified by a depth analysis to separate the real potholes from the patches by following a threshold methodology.
Despite the fact that image-based processing is the most employed technique used for surface distress detection, acceleration data are also used to detect a group of more limited anomalies (mainly potholes and bumps) by applying data-driven models to classify the vibration variations of a moving vehicle. Acceleration-based detection systems usually encompass signal processing and analysis phases, followed by feature extraction to train and test machine learning models. The signal processing and analysis consist of several denoising techniques, such as high-pass filters, demodulation, windowing, frequency domain, and wavelet transformation to smooth the signal and reduce the effects of speed [
15], collection device setup (in case of smartphones the placing is important), and vehicle dynamics (suspension effect).
Notwithstanding the main purpose described in this section of surface distresses detection, acceleration-based data-driven models can also be applied to classify the road type [
24]. Thus, Agebure et al. [
24] proposed a three-tier architecture capable of both detection and classification of anomalies and road type (paved or unpaved) by applying a novel neural network technique (spiking neural network) to statistical features extracted from smartphone built-in accelerometers.
5.2.2. Estimation of Pavement Quality Indexes
The most used pavement quality indexes in PMS are the international roughness index (IRI), pavement condition index (PCI) and present serviceability index (PSI). The IRI determines the smoothness of the pavement surface, and it is determined by using a quarter-car model to simulate vehicle dynamic response in order to obtain the road profile. While the PCI is a quality rating ranging from 0 (worst) to 100 (best) and it is obtained based on distresses observed during walking or riding surveys, the PSI, which ranges from 0 (very poor condition) to 5 (very good condition), is determined by a set of equations that are derived from the user perceptions and ratings for the present serviceability of the pavement. For the estimation of pavement quality indexes, acceleration is the most used data type, though image-based methods can also contribute to determine quality indexes since these usually depend on the frequency and severity of the surface anomalies detected by the latter methods. While model-driven systems attempted to estimate existent pavement quality indexes, such as IRI [
17,
19] and PCI [
16], data-driven models focused on classifying the state of the surface into qualitative groups [
20,
23]. Concurrently, most model-driven systems resort to regression analysis [
16,
17,
19], while data-driven resort to machine learning models, such as SVM [
20] and random forest [
23].
Acceleration data can be significantly volatile depending on the speed of the vehicle during collection. To tackle this, data were sometimes collected at pre-defined speeds, excluding any data collected outside of those pre-defined ranges during signal/data processing phase [
16]. On the other hand, some systems considered the speed as an independent variable, attempting to compensate for vehicle acceleration and deceleration during collection phase [
17,
19]. Many of these studies tested their systems only on one single vehicle with specific characteristics [
16,
21]. However, novel solutions comprising the implementation of smartphone-based estimation systems on any type of vehicle and with different setups have been studied by considering a participatory, crowdsourcing solution. Those solutions must account for the variability of different vehicle dynamics, as well as for the installation setup, which are two additional variables that need to be considered besides speed dependency.
In this context, the most commonly adopted index, IRI, was obtained by applying the quarter car model, which depends on the dynamics of the vehicle. However, in a participatory system, the uncertainty in the vehicle response needs to be addressed. In this line, Zhao et al. [
17] developed a two-step IRI estimation system based on the variation of the collected acceleration with a smartphone. Firstly, transfer functions were used to convert the root mean squared (RMS) value of the measured acceleration by considering the identified vehicle model to the RMS acceleration of the sprung mass of standard quarter car. The obtained RMS, which already reflects the vehicle pitching motions and smartphone installation setup, was then used to estimate IRI by means of linear regression. Zeng et al. [
21] also considered that RMS showed a good correlation with IRI, and ended up performing a sample size analysis to determine how many trips would be needed to reach a robust estimate of IRI for a determined pavement section.
Another commonly used index, PSI, describes the pavement functional condition with respect to riding quality, which depends on the estimation of other indexes, such as IRI, PCI and rutting [
16]. In fact, Aleadelat et al. [
16] adopted regression analyses on smartphone acceleration data to determine PSI values. Signal processing includes both median and average filters to smoothen the smartphone-acquired signal. Whereas previous systems only based their estimations on the vertical component of acceleration, Chuang et al. [
22] considered both vertical and lateral acceleration to estimate PPI based on the perception of riding comfort. According to the authors, by considering both acceleration components, the need for having a predefined acceleration threshold to identify anomalies is avoided. Instead, the thresholds are assigned adaptively to a certain vehicle under different velocity since this is positively correlated with the amplitude of the acceleration.
Regarding data-driven models, Asfault [
20] and Streetcheck [
23] focused on the evaluation and monitoring of pavement conditions by implementing participatory frameworks through smartphone apps that measure acceleration variations. The ensuing databases were used to train and test several machine learning algorithms. For the development of Asfault [
20], which classifies pavements as one of five categories (good, average, fair, poor and obstacle), the SVM with a polynomial kernel model outperformed other models, such as random forest, decision trees, k-nearest neighbors and naïve Bayes in what concerned both accuracy and computational effort. As for Streetcheck [
23], this system instead aimed at a binary classification which differentiates stretches of a road as good or bad, for which random forests output the highest accuracy among several tested supervised learning algorithms (i.e., random forests, SVM, k-nearest neighbors (KNN) and J48).
Besides acceleration, image-based systems have also been used to determine pavement condition indexes. Majidifard et al. [
68], for the surface distress detection approach, made use of image-based techniques and a deep machine learning hybrid model to predict a pavement surface condition index. This hybrid model consisted of the integration of the YOLO model to classify distresses and the U-NET model to quantify the severity of each class of distress. The distresses detected by the semantic segmentation model ranged from different types of cracks, such as transverse and longitudinal cracks, sealed cracks, alligator, and block cracks, to potholes. Concerning the prediction of the pavement condition index (PASER—pavement surface evaluation and rating), the authors applied three data-driven prediction models, namely gene expression programming (GEP), linear regression and weighted-based prediction in view of determining the best explanatory variables.
5.3. Structural Evaluation
5.3.1. Detection and Evaluation of Fatigue Cracking Progression
Since fatigue cracking is a result of cracks that develop inside the asphalt layers usually with a bottom-up direction, this kind of structural distress can be detected by monitoring the variation of pavement responses and comparing it with a reference response of an uncracked pavement. These fatigue cracking detection systems are either based on the variations of horizontal strain or vertical displacement [
43,
46,
48,
50], or acoustic wave propagation [
42,
53].
Some methods can detect cracks by monitoring the variations of acoustic signature of the pavement [
42], which depend on the elastic modulus of the material. Fedele et al. [
42] based his work on the hypothesis that the presence of cracks leads to a decrease in pavement characteristics, such as stiffness, and therefore a reduction in acoustic wave transmission. By evaluating the linear correlation of the elastic modulus (E) with the power spectral density (PSD) obtained from the acoustic signature, Fedele et al. proved the hypothesis that cracks can be detected by monitoring the acoustic signature. Ji et al. [
53] also resorted to an acoustic-based method to estimate the width of cracks by applying linear regression analysis to a coefficient of acoustic wave attenuation.
Wang et al. [
50] investigated the possibility of detecting cracks by resorting to optical fiber and FBG sensing techniques. While optical fiber was more adequate for distributed monitoring by being employed to measure the global mechanical properties, FBG was used for local detection of cracks and deformation with higher precision. Based on Bragg grating laws and Brillouin optical time domain analysis (BOTDA), the strain was measured in each sensing node. The detection of cracks was made possible by comparing two strain profiles: a reference one without cracks and one after cracking occurs.
Lenglet et al. [
48] sought to anticipate damage by monitoring the strain profiles of pavement under realistic conditions and traffic. The method of detecting cracks followed the process of obtaining a reference strain profile of a pavement in good condition to compare with the strain profile measured. In this case, the reference profile was obtained by applying the linear elastic model of Burmister.
Instead of a deterministic approach, Alavi et al. [
46] proposed a damage detection system which applies a stochastic approach to the detection of cracks based on the relationship between the probability density function (PDF) parameters obtained from strain distribution and damage progression of a bottom-up crack. In the same line, Hasni et al. [
43] resorted to a probabilistic neural network (PNN), which classified the damage state of the pavement into four classes.
5.3.2. Estimation of Pavement Characteristics and Prediction of Mechanical Response
The accurate estimation of the pavement stiffness is crucial when it comes to the structural evaluation of a pavement. Currently, agencies leverage on FWD to evaluate the structural response of a pavement. By considering the theory of elasticity, it is possible to estimate the elastic modulus of the pavement layers through back-analysis. Thus, the main focus of the works described in this section was both the prediction of the mechanical response of the pavement under traffic load [
49,
51,
52,
54] or temperature effect [
56], and the estimation of pavement characteristics, such as the elastic modulus of pavement layers. The latter was usually obtained through back-analysis supported by a structural model of the pavement, either by considering an elastic [
49,
51,
52] or a viscoelastic [
52,
54] behavior.
Duong et al. [
52] monitored an instrumented asphalt pavement section of a motorway and used that data to evaluate the mechanical properties of the different pavement layers. The elastic modulus was obtained by applying back-calculating techniques to the pavement mechanical model. The authors not only concluded that it is possible to continuously monitor a pavement section under real traffic, but they also evidenced the importance of analyzing the behavior of pavement layers and interfaces.
Ma et al. [
54] developed a system to monitor airport asphalt pavement health that consisted of the instrumentation of a taxiway pavement with strain and stress sensors. The measured mechanical responses were used to update a mechanical model of the pavement. The latter was based on a multi-layered system theory, which adopts a viscoelastic behavior as a starting point to simulate the mechanical response of the asphalt pavement. The measured mechanical responses provided the basis both for the back-calculation of the elastic modulus of the pavement layers, by comparing them with the theoretical mechanical responses, and for the successive update of the mechanical model. Thereupon, the pavement damage from fatigue cracking and rutting was determined by applying transfer functions, which related the mechanical responses with the elastic modulus and the pavement performance. Additionally, the authors also explored a non-deterministic process for pavement distress prediction, which resorted to a neural network.
Zhao et al. [
55] implemented a data-driven approach to assess the support conditions of rigid pavements. This was achieved by applying a probabilistic neural network to the extracted features associated with vibration signal detected by the optical fiber sensing arrays. Instead of using back-calculating techniques, some works investigated the possibility of estimating the elastic modulus by finding correlations between other characteristics of the pavement and the pavement modulus. Here, Cafiso et al. [
45] demonstrated that extracted features from the vibro-acoustic signature of the pavement can have a good correlation with the pavement’s elastic modulus.
6. Conclusions and Future Trends
This paper comprises a survey of the recent smart developments in the field of infrastructure monitoring contributing toward smart pavement environments. To achieve this, the work begins by firstly identifying the existent data collection methods in the context of pavement management and maintenance (
Section 4), followed by a study on the relevant analysis methods for the collected data, which, in turn, often result in decision support systems (
Section 5).
The application of smart technologies, such as IoT and AI, to the field of pavement monitoring and condition evaluation will undoubtedly contribute to more efficient, less costly, safer, and environmentally friendly methodologies. All things considered, the main drive of the present work was to provide insight for the development of future decision support systems for smart pavement management by conducting a systematic literature review of the developed works that apply smart technologies to this field. In fact, future PMSs should tend to be capable of collecting and analyzing data at different levels, both externally at the surface or inside the pavement, as well as detecting and predicting all types of functional and structural flaws and defects.
Four key research questions (RQ) were identified and have supported the paper content. The first research question (RQ1) focuses on identifying the smart technologies that have been used or show significant potential of being applied to pavement condition monitoring. Throughout the literature review on this subject, these smart data collection methods were divided into external and embedded methods. While external methods were either smartphone-based sensors, or sensors installed in smart probe vehicles or drones, embedded methods could be either located inside the pavement or in fewer cases installed on the surface of the pavement. Some conclusions can be drawn from the content analysis of the selected reviewed papers belonging to each category of data collection method considered. Hence, in what concerns external data collection methods, which either focus on detecting surface distresses or pavement quality indexes, we conclude the following:
The most used methods focus either on obtaining acceleration or image data. However, accelerometer-based solutions are less expensive while maintaining a reasonable efficiency compared with image-based methods. Indeed, despite featuring a higher reported effectiveness, the cost of these methods is higher, including in terms of computational requirements.
An increasing interest in smartphones can be verified, especially when taking into account the opportunities that arise with interconnected devices as a complement to the traditional monitoring processes in view of minimizing the use of more expensive and precise equipment.
Most recently, the interest in UAV-based methods has grown significantly as well, though the implementation of such methods by the industry still must overcome a significant number of obstacles related with flight permissions and low autonomy.
When it comes to embedded methods, which focus on the structural analysis of the pavement, we conclude the following:
The emergence of these methods benefited from the extensive research in the field of concrete structure monitoring, and it was consequently initially applied to rigid pavements. Nonetheless, in the most recent years, the implementation of embedded sensorization is being broadened to include flexible pavements as well.
Among embedded methods, piezoelectric sensors have been the subject of increased attention as a result of the advantages associated with not requiring an energy source, as they are able to produce their own while measuring strains and stresses in a sustainable way.
The second research question (RQ2) addresses the identification of data analysis methods based on smart technologies, such as artificial intelligence techniques. These methods were further divided according to the focus of the evaluation, which can either be functional or structural. On the one hand, functional evaluation can be either achieved by the detection of surface distresses or by the estimation of the pavement surface condition indexes. On the other hand, structural evaluation can focus on the detection of fatigue cracking, or on the estimation of pavement-intrinsic characteristics related with the structural capacity, such as the elastic modulus and the consequent prediction of the mechanical response. From the analysis of the identified methods present in the literature, some conclusions can be drawn, firstly related with functional data analysis methods:
These methods are mainly based either on acceleration data or on image-based data.
The development of data-driven models applied to image-based datasets to detect surface distresses has been a subject of study for a long time, and many CNN architectures have been compared when applied to this problem. Currently, the tendency in image processing crack detection systems aided by data-driven models is to decrease computational effort by optimizing the hyperparameters of the ML model.
Besides the significant implementation time and computational effort of data-driven models, such as CNN, other limitations can be pointed out, namely those related with the used database, which can compromise the efficiency and capacity of the model trained to make predictions on different databases.
The estimation of pavement quality indexes is largely based on acceleration data, while the main difference between systems is related to either the machine learning model or the signal processing technique applied to the measured data.
Secondly, in relation to the works concerning the structural data analysis, we conclude the following:
Most methods are based on the estimation of the pavement elastic modulus, with the objective of either detecting fatigue cracking or predicting the mechanical response. The elastic modulus is typically obtained by back-analysis supported by mechanical models, or more recently by finding correlations with other pavement characteristics such as the pavement vibro-acoustic signature.
Fatigue cracking is detected by comparing the current behavior of the pavement with a reference behavior of a healthy pavement. This reference could be based on the strain and stress signal or on the acoustic signal of the pavement.
When it comes to the prediction of the pavement mechanical response, the current tendency seems to be the improvement of the mechanical models that simulate the mechanical response, which are also used to estimate the elastic modulus by back-calculation. Traditional FWD-based methodologies adopt the elastic theory to assess the structural response of the pavement. Yet, as it was proven by several recent studies, the resulting models are not able to capture the behavior of a flexible pavement effectively since its behavior is more akin to a viscoelastic material.
Many of the developed systems presented in the literature have already integrated the whole process of a pavement management system from data collection, data analysis and decision support visualization tools (RQ3) in an automated, seamless system for surface condition monitoring [
19,
20,
22,
23,
25,
27]. Smartphone-based systems are an example of an easily implementable tool that can encompass all of these three modules of a PMS. However, presently, these systems are exclusively used to evaluate the surface condition, i.e., a functional level evaluation.
When considering a pavement monitoring system which integrates both smart data collection and data analysis methods and features the capability to assess pavement both functionally and structurally (RQ4), the literature reveals a lack of such ubiquitous systems. Notwithstanding the fact that the pavement monitoring systems developed today already integrate smart data collection and data analysis methods, these still focus on either a functional or structural evaluation. Thus, noteworthy directions for future work in this field may include the exploration and/or improvement of the following topics:
Optimization of sensor placement for smartphone-based systems. The smartphone placement inside the vehicle can be further optimized and standardized or be taken into account in the analysis as a feature.
Route planning and optimization in case of dynamic monitoring, such as smart probe vehicles and UAV. Bearing in mind that UAV usually have a low autonomy, the routes have a greater need of being optimized to cover more sections of the network in a single run.
Since the exploration of embedded solutions is somewhat recent, there is still a research gap regarding the effects of using such methods in the long run. Future research of embedded sensors may also focus on studying the impact of the presence of sensors inside the pavement, regarding both the pavement performance and life cycle assessment, along with the evaluation of sensor survivability for long-term applications.
Crowdsourcing smartphone-based systems and connected vehicles can be leveraged to collect large volumes of data that can significantly improve the accuracy of infrastructure agencies’ own collected data.
Consequently, those systems enable the creation of unified databases to generalize the application of trained ML models, aiming at eliminating the decrease in efficiency when these models are applied to different databases. This aspect can be extended to include standardized public ML training databases from which models can be trained up to a certain performance level by any researcher. This would ultimately allow for further studies to be carried out from that point onward, similar to the databases used to train convolutional neural networks in the image classification field, such as the well-known VGG-16 [
69] or the ResNet50 [
70] databases.
The integration of both smart external and embedded data collection methods covers functional and structural evaluation simultaneously and in a continuous, dynamic way. This would not only allow for the monitorization of a greater area of the network for less time and resources, but also benefit the performance of decision support systems. Ultimately, this would result in a comprehensive smart pavement management system that could aid the infrastructure agencies by supporting decision making from a holistic perspective.
Author Contributions
Conceptualization, M.P., J.N. and P.F.; Methodology, M.P., J.N. and P.F; Validation, M.A., M.P. and J.N.; Formal analysis, M.A.; Investigation, M.A.; Writing—original draft, M.A. and M.P; Writing—review & editing, M.A., M.P., J.N. and P.F.; Visualization, M.P. and P.F. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by European Structural and Investment Funds in the FEDER component, through the Operational Competitiveness and Internationalization Programme (COMPETE 2020) and Lisbon Regional Operational Programme (ROP Lisbon) [Project n.° 046123; Funding Reference: POCI-01-0247-FEDER-046123 and LISBOA-01-0247-FEDER-046123]. It is also supported by the Highly Qualified Human Resources programme [Funding Reference: NORTE-06-3559-FSE-000116].
Data Availability Statement
Not applicable.
Acknowledgments
The authors gratefully acknowledge the support of CERIS (Civil Engineering Research and Innovation for Sustainability). Furthermore, the authors would like to express their gratitude to all members of the Portuguese Committee of Geotechnics for Transportation (CPGT) of the Portuguese Geotechnical Society (SPG) for relevant formal and informal discussions, comments and remarks which aided the development of this work.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations were used in this manuscript:
| AI | Artificial intelligence |
| BOTDA | Brillouin optical time domain analysis |
| CNN | Convolutional neural networks |
| DSS | Decision support systems |
| DTPS | Dynamic tire pressure sensor |
| E | Elastic modulus |
| FBG | Fiber Bragg grating sensors |
| FWD | Falling weight deflectometer |
| GEP | Gene expression programming |
| GPR | Ground-penetrating radar |
| GPS | Global positioning system |
| IoT | Internet of things |
| IRI | International roughness index |
| KNN | K-nearest neighbors |
| LiDAR | Light detection and ranging |
| ML | Machine learning |
| M&R | Maintenance and rehabilitation |
| PASER | Pavement surface evaluation and rating |
| PCI | Pavement condition index |
| PDF | Probability density function |
| PMS | Pavement management systems |
| PNN | Probabilistic neural network |
| PPI | Pavement performance index |
| PSD | Power spectral density |
| PSI | Present serviceability index |
| RMS | Root mean squared |
| RQ | Research question |
| SfM | Structure from motion |
| SPA | Self-powered damage-detection aggregate |
| SVM | Support vector machines |
| UAV | Unmanned aerial vehicle |
| YOLO | You only look once |
References
- Gupta, S.; Langhans, S.D.; Domisch, S.; Fuso-Nerini, F.; Felländer, A.; Battaglini, M.; Tegmark, M.; Vinuesa, R. Assessing whether artificial intelligence is an enabler or an inhibitor of sustainability at indicator level. Transp. Eng. 2021, 4, 100064. [Google Scholar] [CrossRef]
- Vinuesa, R.; Azizpour, H.; Leite, I.; Balaam, M.; Dignum, V.; Domisch, S.; Felländer, A.; Langhans, S.D.; Tegmark, M.; Nerini, F.F. The role of artificial intelligence in achieving the Sustainable Development Goals. Nat. Commun. 2020, 11, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Picado-Santos, L.; Ferreira, A.; Antunes, A.; Carvalheira, C.; Santos, B.; Bicho, M.; Quadrado, I.; Silvestre, S. Pavement management system for Lisbon. Proc. Inst. Civ. Eng. Munic. Eng. 2004, 157, 157–165. [Google Scholar] [CrossRef]
- Peraka, N.S.P.; Biligiri, K.P. Pavement asset management systems and technologies: A review. Autom. Constr. 2020, 119, 103336. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, D. Definition, Function, and Framework Construction of a Smart Road. In Proceedings of the 2015 International Symposium on Frontiers of Road and Airport Engineering, Shanghai, China, 26–28 October 2015. [Google Scholar] [CrossRef]
- Pompigna, A.; Mauro, R. Smart roads: A state of the art of highways innovations in the Smart Age. Eng. Sci. Technol. Int. J. 2021, in press. [Google Scholar] [CrossRef]
- Outay, F.; Mengash, H.A.; Adnan, M. Applications of unmanned aerial vehicle (UAV) in road safety, traffic and highway infrastructure management: Recent advances and challenges. Transp. Res. Part A Policy Pract. 2020, 141, 116–129. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.; Lechner, B.; Wong, Y.D. Response-based methods to measure road surface irregularity: A state-of-the-art review. Eur. Transp. Res. Rev. 2019, 11, 43. [Google Scholar] [CrossRef] [Green Version]
- Alavi, A.H.; Buttlar, W.G. An overview of smartphone technology for citizen-centered, real-time and scalable civil infrastructure monitoring. Futur. Gener. Comput. Syst. 2019, 93, 651–672. [Google Scholar] [CrossRef]
- Shtayat, A.; Moridpour, S.; Best, B.; Shroff, A.; Raol, D. A review of monitoring systems of pavement condition in paved and unpaved roads. J. Traffic Transp. Eng. 2020, 7, 629–638. [Google Scholar] [CrossRef]
- Graziano, A.D.; Marchetta, V.; Cafiso, S. Structural health monitoring of asphalt pavements using smart sensor networks: A comprehensive review. J. Traffic Transp. Eng. 2020, 7, 639–651. [Google Scholar] [CrossRef]
- Schnebele, E.; Tanyu, B.F.; Cervone, G.; Waters, N. Review of remote sensing methodologies for pavement management and assessment. Eur. Transp. Res. Rev. 2015, 7. [Google Scholar] [CrossRef] [Green Version]
- Zakeri, H.; Nejad, F.M.; Fahimifar, A. Image Based Techniques for Crack Detection, Classification and Quantification in Asphalt Pavement: A Review. Arch. Comput. Methods Eng. 2017, 24, 935–977. [Google Scholar] [CrossRef]
- Wu, T.-H.; Yi, C.-W.; Chan, C.-Y.; Chang, Y.-L.; Tseng, C.-C.; Chung, C.-F. A preliminary study on SPC-crowd pavement indexing. In Proceedings of the 2015 17th Asia-Pacific Network Operations and Management Symposium (APNOMS), Busan, Korea, 19–21 August 2015; pp. 336–339. [Google Scholar] [CrossRef]
- Seraj, F.; van der Zwaag, B.J.; Dilo, A.; Luarasi, T.; Havinga, P. Roads: A road pavement monitoring system for anomaly detection using smart phones. In Big Data Analytics in the Social and Ubiquitous Context; Springer: Nancy, France, 2016. [Google Scholar] [CrossRef] [Green Version]
- Aleadelat, W.; Ksaibati, K. Estimation of pavement serviceability index through android-based smartphone application for local roads. Transp. Res. Rec. J. Transp. Res. Board 2017, 2639, 129–135. [Google Scholar] [CrossRef]
- Zhao, B.; Nagayama, T. IRI Estimation by the Frequency Domain Analysis of Vehicle Dynamic Responses. Procedia Eng. 2017, 188, 9–16. [Google Scholar] [CrossRef]
- Hadjidemetriou, G.M.; Vela, P.A.; Christodoulou, S.E. Automated Pavement Patch Detection and Quantification Using Support Vector Machines. J. Comput. Civ. Eng. 2018, 32, 04017073. [Google Scholar] [CrossRef]
- Meng, L.; Yang, S.; Yang, H.; Xiao, F. The crowdsourcing-based estimation and display of rural highway condition from smartphone sensors under natural driving. In Proceedings of the 17th COTA International Conference of Transportation Professionals, Shanghai, China, 7–9 July 2017; pp. 108–119. [Google Scholar] [CrossRef]
- Souza, V.M.A.; Giusti, R.; Batista, A.J.L. Asfault: A low-cost system to evaluate pavement conditions in real-time using smartphones and machine learning. Pervasive Mob. Comput. 2018, 51, 121–137. [Google Scholar] [CrossRef]
- Zeng, H.; Park, H.; Smith, B.L.; Parkany, E. Feasibility Assessment of a Smartphone-Based Application to Estimate Road Roughness. KSCE J. Civ. Eng. 2018, 22, 3120–3129. [Google Scholar] [CrossRef]
- Chuang, T.-Y.; Perng, N.-H.; Han, J.-Y. Pavement performance monitoring and anomaly recognition based on crowdsourcing spatiotemporal data. Autom. Constr. 2019, 106, 102882. [Google Scholar] [CrossRef]
- Nunes, D.E.; Mota, V.F.S. A participatory sensing framework to classify road surface quality. J. Internet Serv. Appl. 2019, 10, 13. [Google Scholar] [CrossRef] [Green Version]
- Agebure, M.A.; Oyetunji, E.O.; Baagyere, E.Y. A three-tier road condition classification system using a spiking neural network model. J. King Saud Univ.Comput. Inf. Sci. 2020. [Google Scholar] [CrossRef]
- Patra, S.; Middya, A.I.; Roy, S. PotSpot: Participatory sensing based monitoring system for pothole detection using deep learning, Multimed. Tools Appl. 2021, 80, 25171–25195. [Google Scholar] [CrossRef]
- Shtayat, A.; Moridpour, S. Best, Using e-bikes and private cars in dynamic road pavement monitoring. Int. J. Transp. Sci. Technol. 2021. [Google Scholar] [CrossRef]
- Staniek, M. Road pavement condition diagnostics using smartphone-based data crowdsourcing in smart cities. J. Traffic Transp. Eng. 2021, 8, 554–567. [Google Scholar] [CrossRef]
- Wang, M.; Birken, R. Shahini Shamsabadi, Implementation of a multi-modal mobile sensor system for surface and subsurface assessment of roadways. In Smart Sensor Phenomena, Technology, Networks, and Systems Integration, Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 8–12 March 2015; SPIE: Bellingham, WA, USA, 2015. [Google Scholar] [CrossRef]
- Zhang, D.; Li, Q.; Chen, Y.; Cao, M.; He, L.; Zhang, B. An efficient and reliable coarse-to-fine approach for asphalt pavement crack detection. Image Vis. Comput. 2017, 57, 130–146. [Google Scholar] [CrossRef]
- Chatterjee, S.; Brendel, A.B.; Lichtenberg, S. Smart infrastructure monitoring: Development of a decision support system for vision-based road crack detection. In Proceedings of the International Conference on Information Systems 2018, ICIS, San Francisco, CA, USA, 13–16 December 2018. [Google Scholar]
- Chen, C.; Seo, H.S.; Zhao, Y.; Chen, B.; Kim, J.W.; Choi, Y.; Bang, M. Pavement damage detection system using big data analysis of multiple sensors. In Proceedings of the International Conference on Smart Infrastructure and Construction 2019 (ICSIC), Cambridge, UK, 8–10 July 2019; pp. 559–569. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Yao, L.; Xu, Z.; Li, Y.; Ao, X.; Chen, Q.; Li, Z.; Meng, B. Road pothole extraction and safety evaluation by integration of point cloud and images derived from mobile mapping sensors. Adv. Eng. Inform. 2019, 42, 100936. [Google Scholar] [CrossRef]
- Alfarraj, O. Internet of things with bio-inspired co-evolutionary deep-convolution neural-network approach for detecting road cracks in smart transportation. Neural Comput. Appl. 2020, 1–16. [Google Scholar] [CrossRef]
- Alsharahi, G.; Bouami, M.F.; Faize, A.; Louzazni, M.; Khamlichi, A.; Atounti, M. Contribution of analysis and detection the risks appearing in roads using GPR method: A case study in Morocco. Ain Shams Eng. J. 2020, 12, 1435–1450. [Google Scholar] [CrossRef]
- Nguyen, P.; Rao, R.; Brown, V.; McConnell, M.; Barendt, N.A.; Zingale, N.C.; Mandal, S.; Kaffashi, F.; Loparo, K.A. A Scalable Pavement Sensing, Data Analytics, and Visualization Platform for Lean Governance in Smart Communities. In Proceedings of the 2020 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 28–30 July 2020; pp. 313–318. [Google Scholar] [CrossRef]
- Park, J.; Lee, J.H.; Bang, J. PotholeEye +: Deep-Learning Based Pavement Distress Detection System toward Smart Maintenance. CMES-Comput. Modeling Eng. Sci. 2021, 127, 965–976. [Google Scholar] [CrossRef]
- Rateke, T.; von Wangenheim, A. Road surface detection and differentiation considering surface damages. Auton. Robots. 2021, 45, 299–312. [Google Scholar] [CrossRef]
- Mettas, C.; Themistocleous, K.; Neocleous, K.; Christofe, A.; Pilakoutas, K.; Hadjimitsis, D. Monitoring asphalt pavement damages using remote sensing techniques. In Proceedings of the Third International Conference on Remote Sensing and Geoinformation of the Environment, Paphos, Cyprus, 16–19 March 2015. [Google Scholar] [CrossRef]
- Chansamorn, C.; Thanakitivirul, P.; Liangrocapart, S.; Khetkeeree, S. Low-cost LiDAR application on unmanned aerial vehicle for road surface survey: Feasibility study. In Proceedings of the 40th Asian Conference Remote Sensing, ACRS 2019, Progress Remote Sensing Technology Smart Future, Daejeon, Korea, 14–18 October 2019. [Google Scholar]
- Roberts, R.; Inzerillo, L.; di Mino, G. Using uav based 3d modelling to provide smart monitoring of road pavement conditions. Information 2020, 11, 568. [Google Scholar] [CrossRef]
- Silva, L.A.; Blas, H.S.S.; García, D.P.; Mendes, A.S.; González, G.V. An architectural multi-agent system for a pavement monitoring system with pothole recognition in uav images. Sensors 2020, 20, 6205. [Google Scholar] [CrossRef] [PubMed]
- Fedele, R.; Pratico, F.G.; Carotenuto, R.; della Corte, F.G. Instrumented infrastructures for damage detection and management. In Proceedings of the 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; pp. 526–531. [Google Scholar] [CrossRef]
- Hasni, H.; Alavi, A.H.; Chatti, K.; Lajnef, N. A self-powered surface sensing approach for detection of bottom-up cracking in asphalt concrete pavements: Theoretical/numerical modeling. Constr. Build. Mater. 2017, 144, 728–746. [Google Scholar] [CrossRef]
- Bi, Y.; Pei, J.; Guo, F.; Li, R.; Zhang, J.; Shi, N. Implementation of polymer optical fibre sensor system for monitoring water membrane thickness on pavement surface. Int. J. Pavement Eng. 2019, 22, 872–881. [Google Scholar] [CrossRef]
- Cafiso, S.; di Graziano, A.; Fedele, R.; Marchetta, V.; Praticò, F. Sensor-based pavement diagnostic using acoustic signature for moduli estimation. Int. J. Pavement Res. Technol. 2020, 13, 573–580. [Google Scholar] [CrossRef]
- Alavi, A.H.; Hasni, H.; Lajnef, N.; Chatti, K. Continuous health monitoring of pavement systems using smart sensing technology. Constr. Build. Mater. 2016, 114, 719–736. [Google Scholar] [CrossRef]
- Kodippily, S.; Tighe, S.L.; Henning, T.F.P.; Yeaman, J. Evaluating pavement performance through smart monitoring–effects of soil moisture, temperature and traffic. Road Mater. Pavement Des. 2016, 19, 71–86. [Google Scholar] [CrossRef]
- Lenglet, C.; Blanc, J.; Dubroca, S. Smart road that warns its network manager when it begins cracking. IET Intell. Transp. Syst. 2017, 11, 152–157. [Google Scholar] [CrossRef]
- Ma, X.; Dong, Z.; Yu, X.; Chen, F.; Cao, C.; Sun, J. Monitoring the structural capacity of airfield pavement with built-in sensors and modulus back-calculation algorithm. Constr. Build. Mater. 2018, 175, 552–561. [Google Scholar] [CrossRef]
- Wang, H.-P.; Xiang, P.; Jiang, L.-Z. Optical fiber sensing technology for full-scale condition monitoring of pavement layers. Road Mater. Pavement Des. 2018, 21, 1258–1273. [Google Scholar] [CrossRef]
- Bahrani, N.; Blanc, J.; Hornych, P.; Menant, F. Pavement instrumentation for condition assessment using efficient sensing solutions. In Proceedings of the International Conference on Smart Infrastructure and Construction 2019 (ICSIC), Cambridge, UK, 8–10 July 2019; pp. 471–480. [Google Scholar] [CrossRef] [Green Version]
- Duong, N.S.; Blanc, J.; Hornych, P.; Bouveret, B.; Carroget, J.; le Leuvre, Y. Continuous strain monitoring of an instrumented pavement section. Int. J. Pavement Eng. 2019, 20, 1435–1450. [Google Scholar] [CrossRef]
- Ji, X.; Hou, Y.; Chen, Y.; Zhen, Y. Fabrication and performance of a self-powered damage-detection aggregate for asphalt pavement. Mater. Des. 2019, 179, 107890. [Google Scholar] [CrossRef]
- Ma, X.; Dong, Z.; Chen, F.; Xiang, H.; Cao, C.; Sun, J. Airport asphalt pavement health monitoring system for mechanical model updating and distress evaluation under realistic random aircraft loads. Constr. Build. Mater. 2019, 226, 227–237. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, D.; Zeng, M.; Tian, Y.; Ling, J. Assessment of concrete pavement support conditions using distributed optical vibration sensing fiber and a neural network. Constr. Build. Mater. 2019, 216, 214–226. [Google Scholar] [CrossRef]
- Liao, W.; Zhuang, Y.; Zeng, C.; Deng, W.; Huang, J.; Ma, H. Fiber optic sensors enabled monitoring of thermal curling of concrete pavement slab: Temperature, strain and inclination. Measurement 2020, 165, 108203. [Google Scholar] [CrossRef]
- Abejide, S.; Mostafa, M.M.H.; Das, D.; Awuzie, B. Pavement Quality Index Rating Strategy Using Fracture Energy Analysis for Implementing Smart Road Infrastructure. Sensors 2021, 21, 4231. [Google Scholar] [CrossRef]
- Dong, W.; Li, W.; Wang, K.; Luo, Z.; Sheng, D. Self-sensing capabilities of cement-based sensor with layer-distributed conductive rubber fibres. Sens. Actuators A Phys. 2020, 301, 111763. [Google Scholar] [CrossRef]
- Birgin, H.B.; Alessandro, A.D.; Laflamme, S. Innovative Carbon-Doped Composite Pavements with Sensing Capability and Low Environmental Impact for Multifunctional Infrastructures. J. Compos. Sci. 2021, 5, 192. [Google Scholar] [CrossRef]
- Baladi, G.; Dawson, T.; Musunuru, G.; Prohaska, M.; Kyle, T. Pavement Performance Measures and Forecasting and the Effects of Maintenance and Rehabilitation Strategy on Treatment Effectiveness (Revised). In Fhwa-Hrt-17-095; US Department of Transportation, Federal Highway Administration: Washington, DC, USA, 2017; pp. 1–329. Available online: https://www.fhwa.dot.gov/publications/research/infrastructure/pavements/ltpp/17095/17095.pdf (accessed on 18 September 2021).
- Sarker, M.; Dias-da-Costa, D.; Hadigheh, S.A. Multi-scale 3D roughness quantification of concrete interfaces and pavement surfaces with a single-camera set-up. Constr. Build. Mater. 2019, 222, 511–521. [Google Scholar] [CrossRef]
- Weng, X.; Huang, Y.; Wang, W. Segment-based pavement crack quantification. Autom. Constr. 2019, 105, 102819. [Google Scholar] [CrossRef]
- Chen, F.C.; Jahanshahi, M.R. ARF-Crack: Rotation invariant deep fully convolutional network for pixel-level crack detection. Mach. Vis. Appl. 2020, 31, 47. [Google Scholar] [CrossRef]
- Chen, T.; Cai, Z.; Zhao, X.; Chen, C.; Liang, X.; Zou, T.; Wang, P. Pavement crack detection and recognition using the architecture of segNet. J. Ind. Inf. Integr. 2020, 18, 100144. [Google Scholar] [CrossRef]
- Guo, L.; Li, R.; Jiang, B.; Shen, X. Automatic crack distress classification from concrete surface images using a novel deep-width network architecture. Neurocomputing 2020, 397, 383–392. [Google Scholar] [CrossRef]
- Kim, B.; Yuvaraj, N.; Preethaa, K.R.S.; Pandian, R.A. Surface crack detection using deep learning with shallow CNN architecture for enhanced computation. Neural Comput. Appl. 2021, 33, 9289–9305. [Google Scholar] [CrossRef]
- Shahbazi, L.; Movaghar, A. Autonomous Road Pavement Inspection and Defect Analysis for Smart City Maintenance. In Proceedings of the 5th International Conference on Pattern Recognition and Image Analysis (IPRIA), Kashan, Iran, 28–29 April 2021; pp. 8–12. [Google Scholar]
- Majidifard, H.; Adu-Gyamfi, Y.; Buttlar, W.G. Deep machine learning approach to develop a new asphalt pavement condition index. Constr. Build. Mater. 2020, 247, 118513. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations, ICLR 2015, San Diego, CA, USA, 7–9 May 2015; pp. 1–14. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef] [Green Version]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).





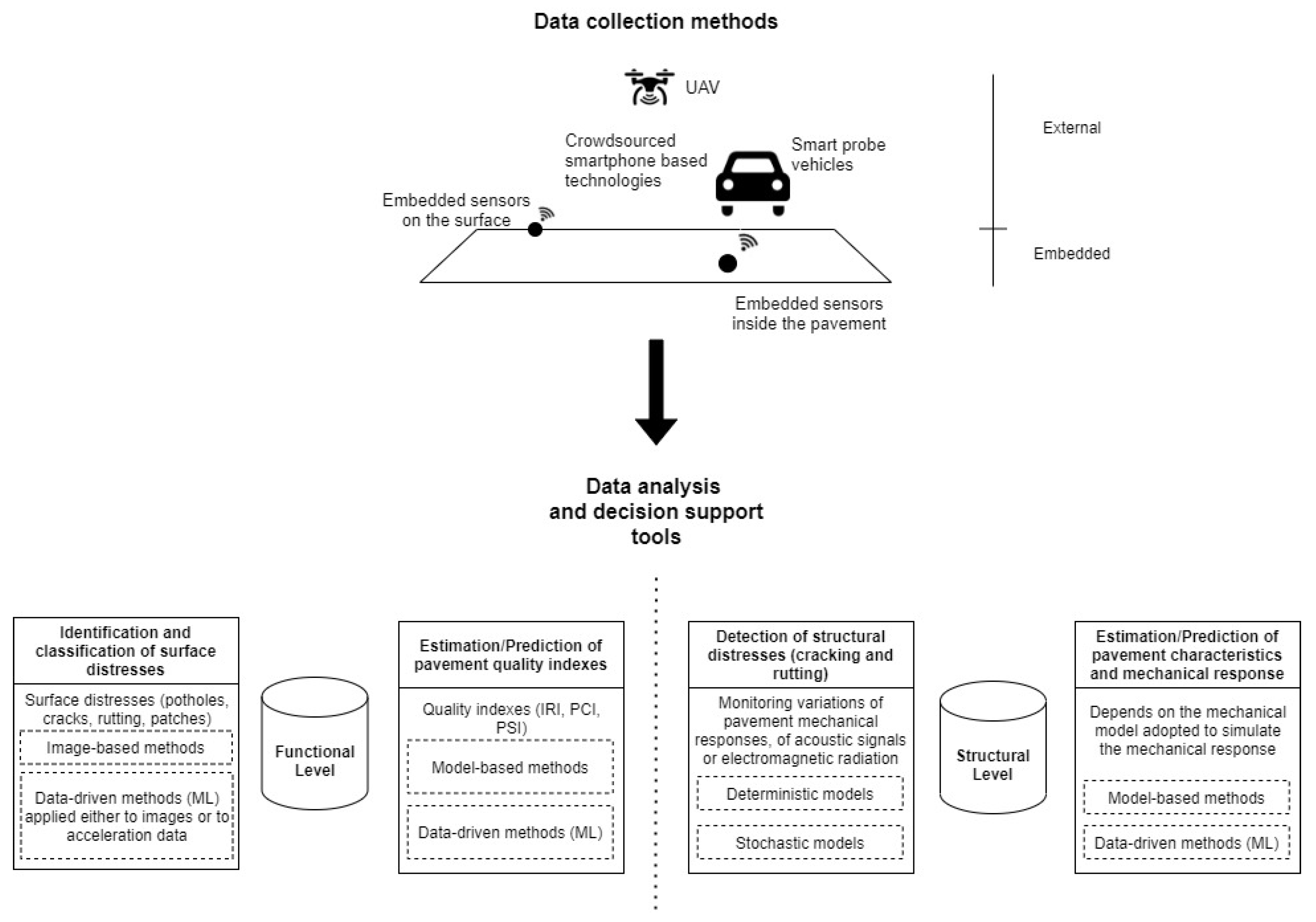
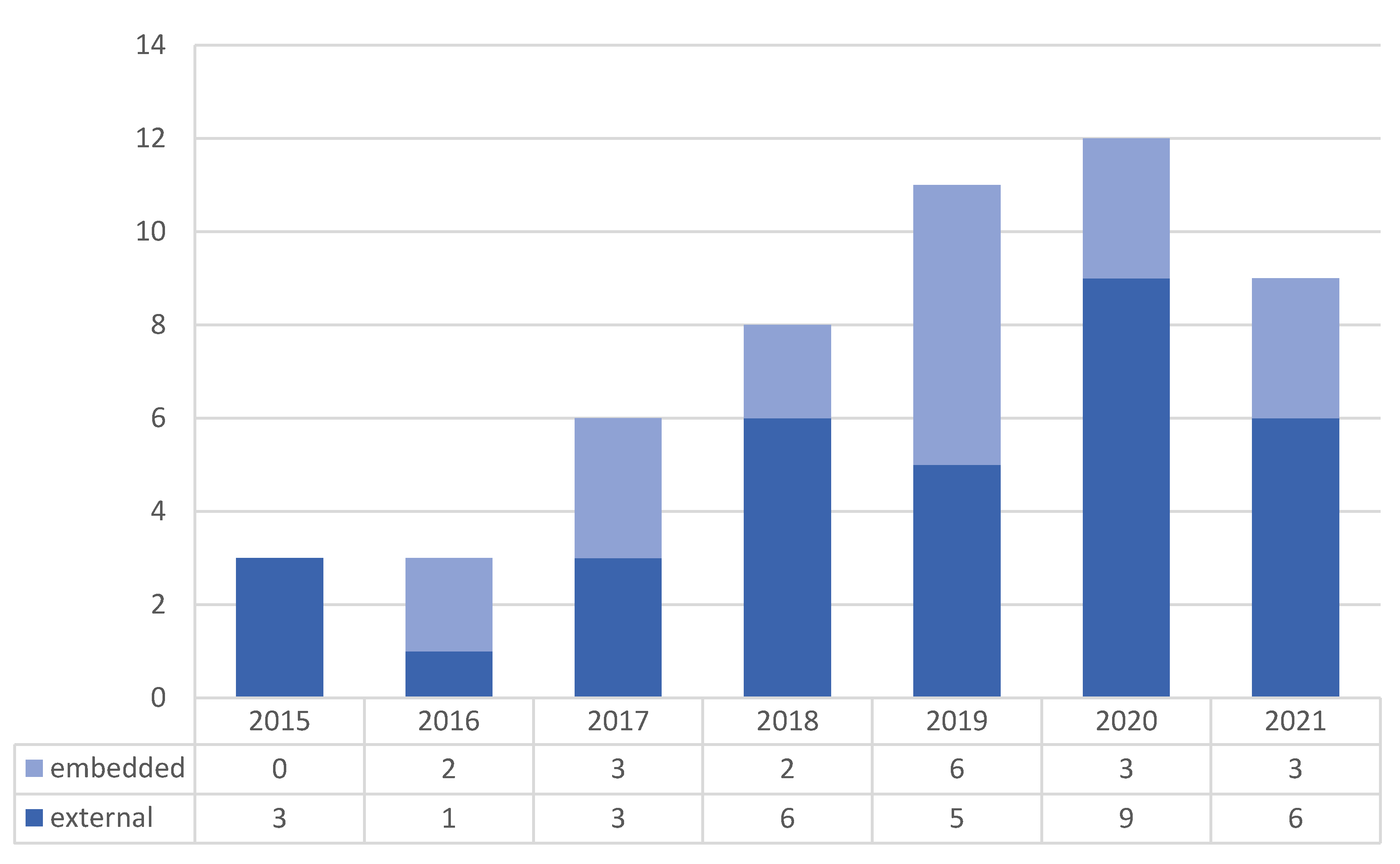
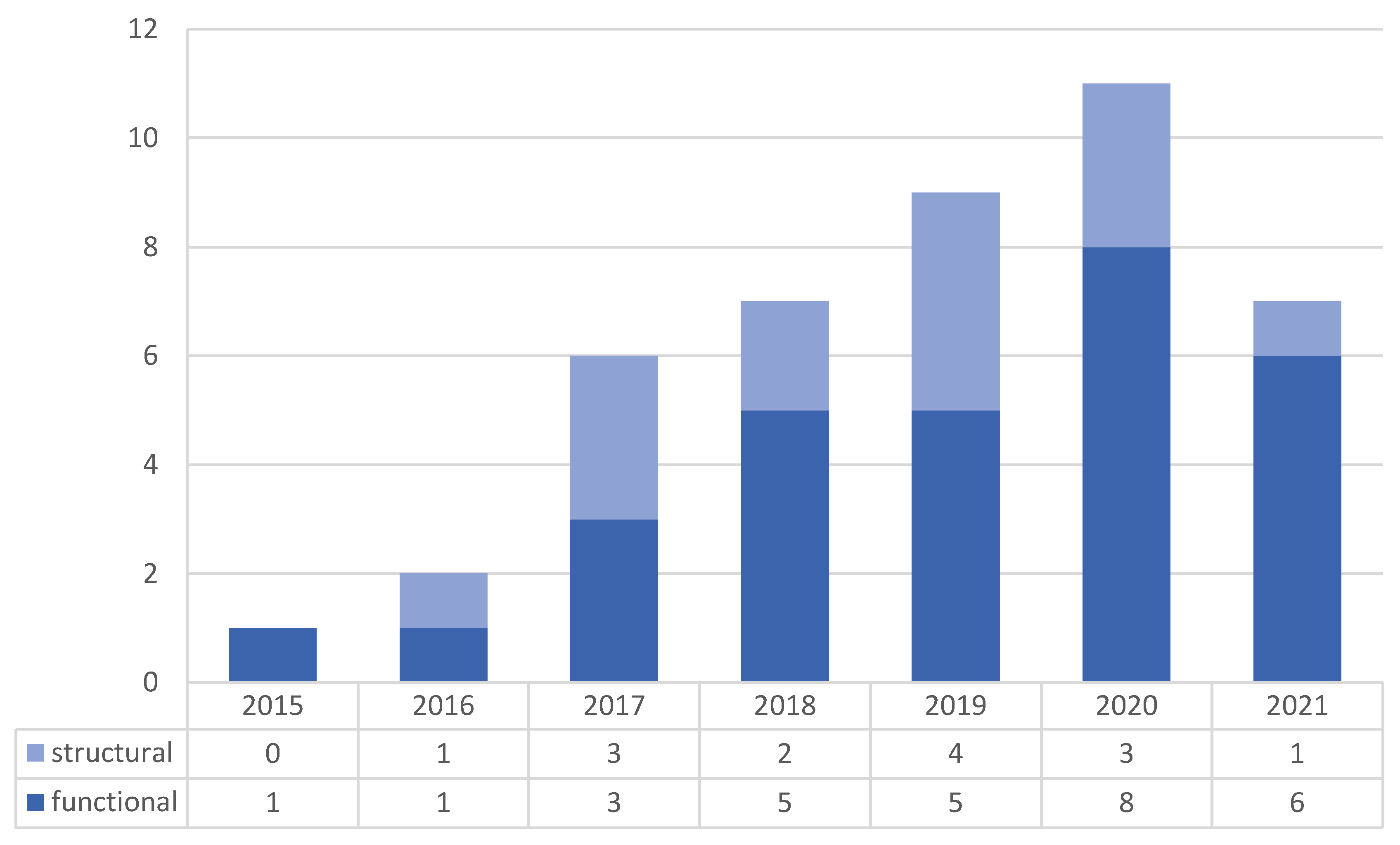
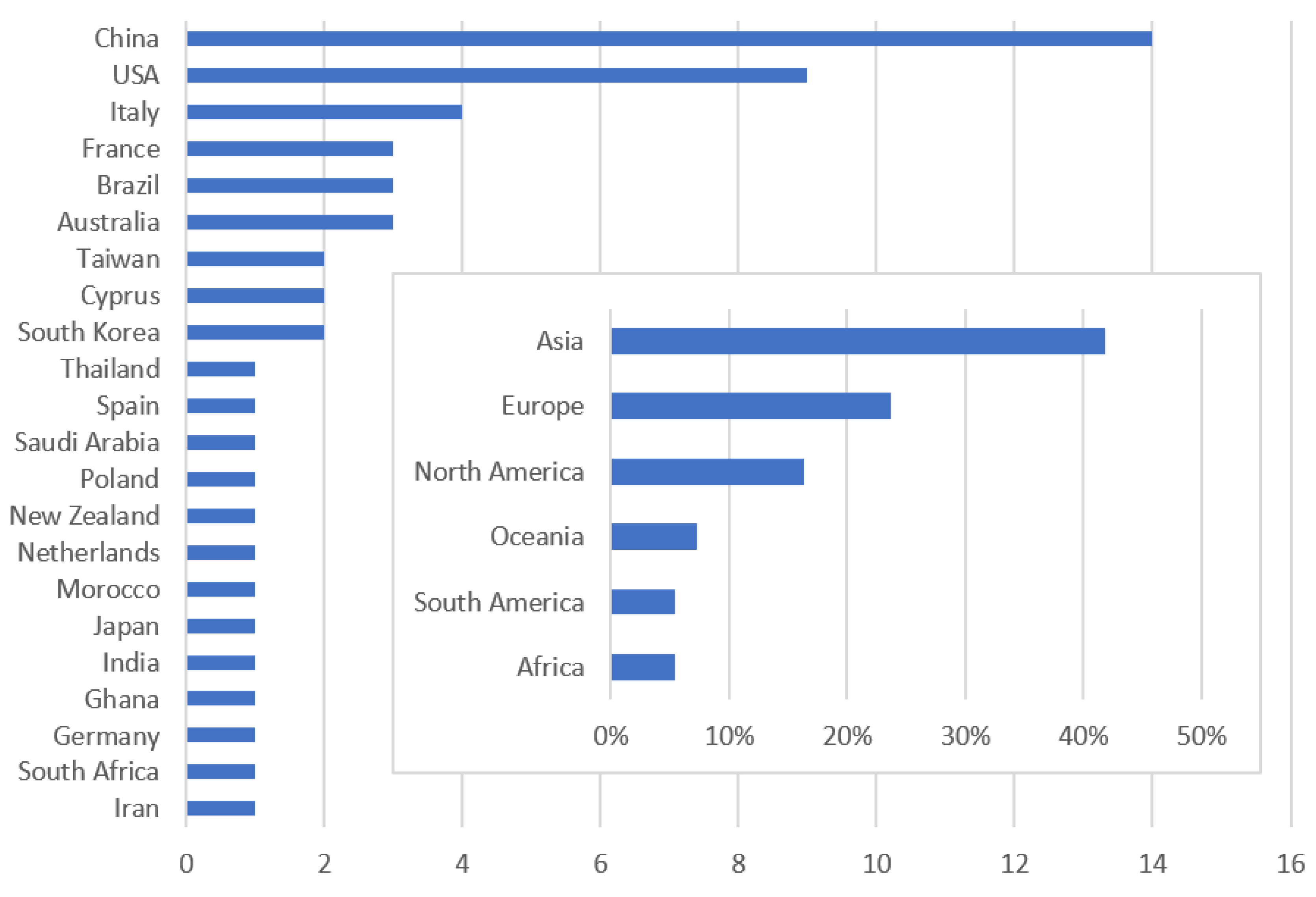

{kind=link}
{kind=link}
{kind=link}
{kind=link}