
Prestressed Steel Material-Allocation Path and Construction Using Intelligent Digital Twins


Abstract
:1. Introduction
2. DT-Driven Intelligent Planning Framework for Material-Allocation Paths
2.1. Characteristics of Material Allocation for Structural Construction
- (1)
- Linkage: In the process of structural construction, many construction elements such as ‘human, machine, material, method, and environment’ are involved, and each element is integrated across fields and multi-services, forming a linkage construction system. A change in one construction element, will cause a response from the whole construction system.
- (2)
- Complexity: In the process of construction management, to realize the macro control of the whole process, it is necessary to sort out the relationship between progress, quality, cost, and safety, especially the coordination between material allocation and construction progress. In addition, the large construction volume of prestressed steel structures and the variety of materials required undoubtedly increase the complexity of construction management.
- (3)
- Diversity: Most of the construction of prestressed steel structures is located in complicated construction sites, accompanied by multiple allocation paths of construction materials, and faced with the problem of selecting the most appropriate allocation path efficiently and accurately.
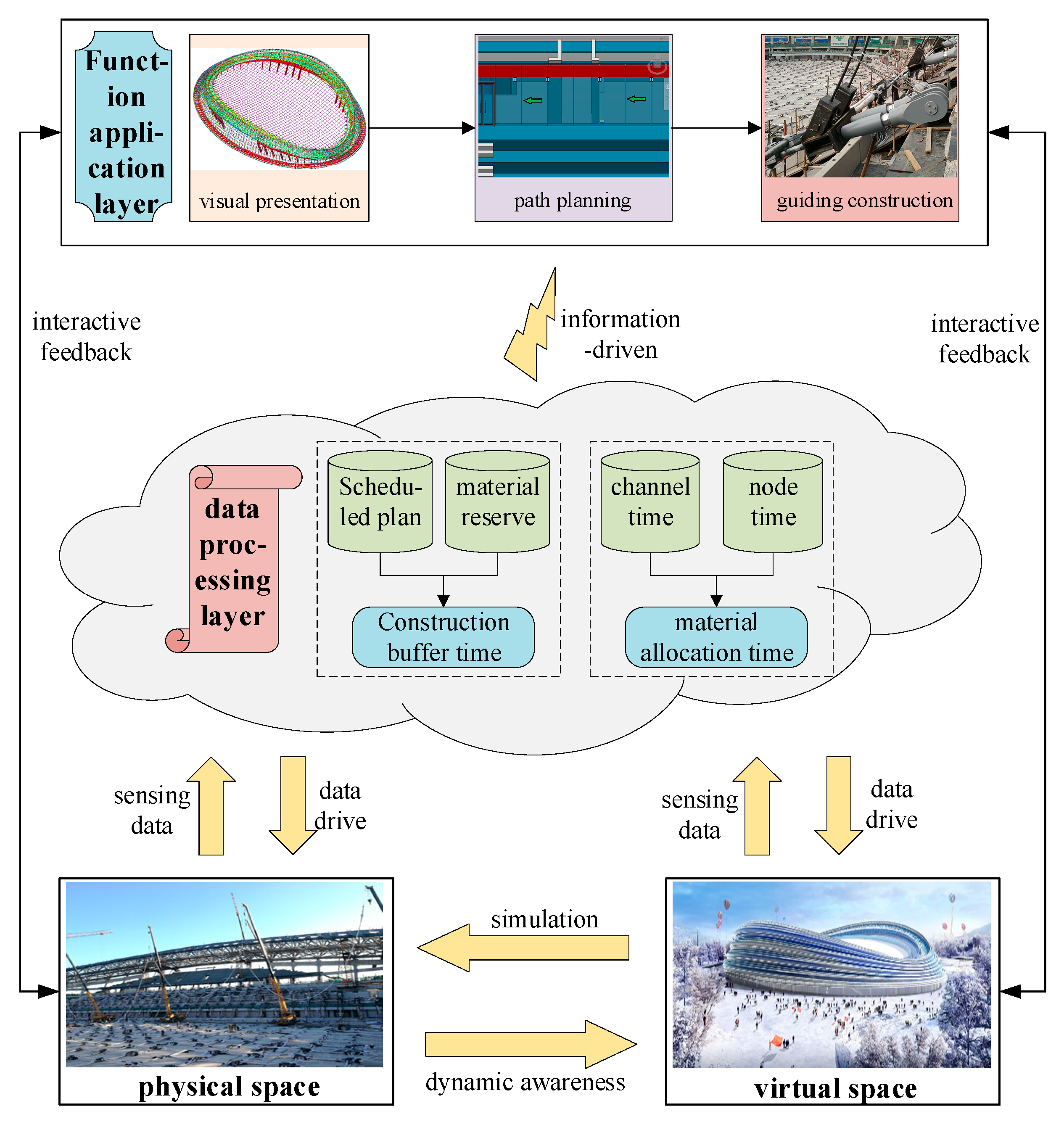
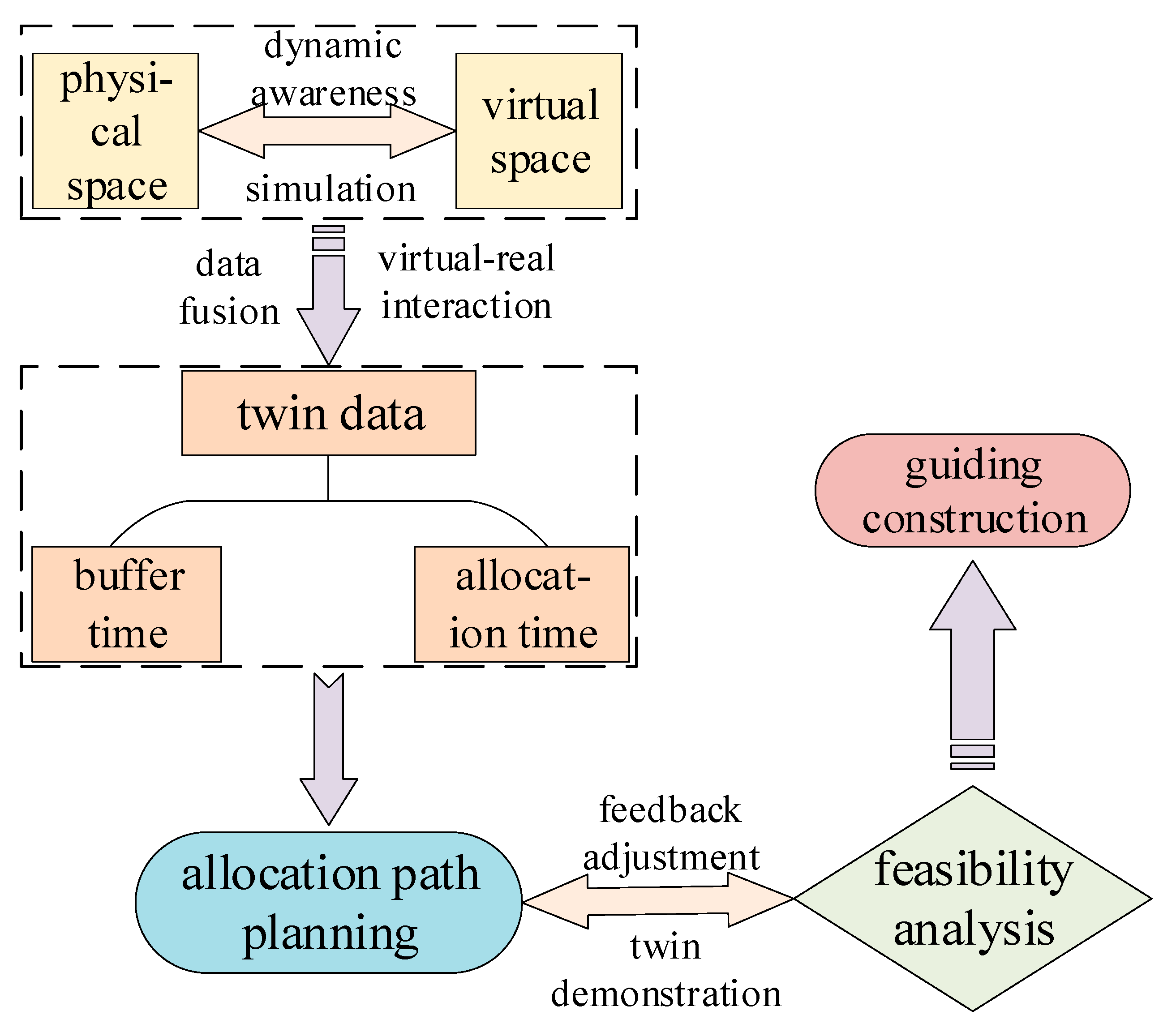
2.2. The DT Framework of Intelligent Path Planning
3. Creation of Virtual–Real Interaction Model for Intelligent Path Planning
3.1. Real-Time Collection of Physical Information
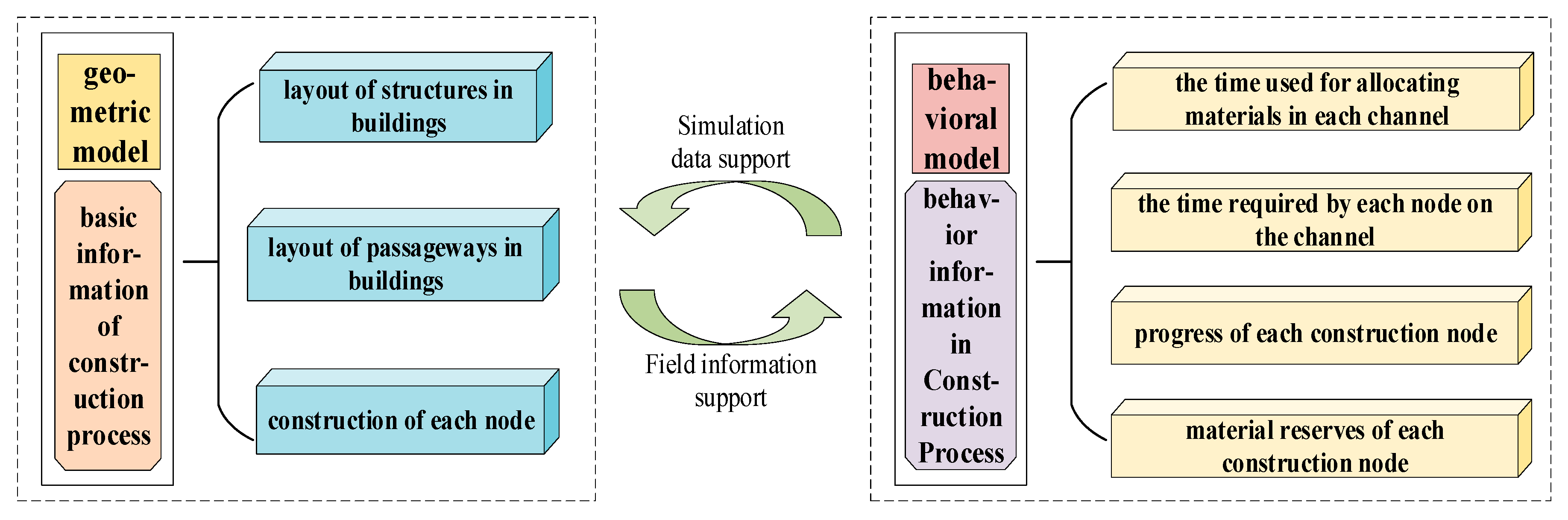
3.2. Dynamic Simulation of Virtual Model
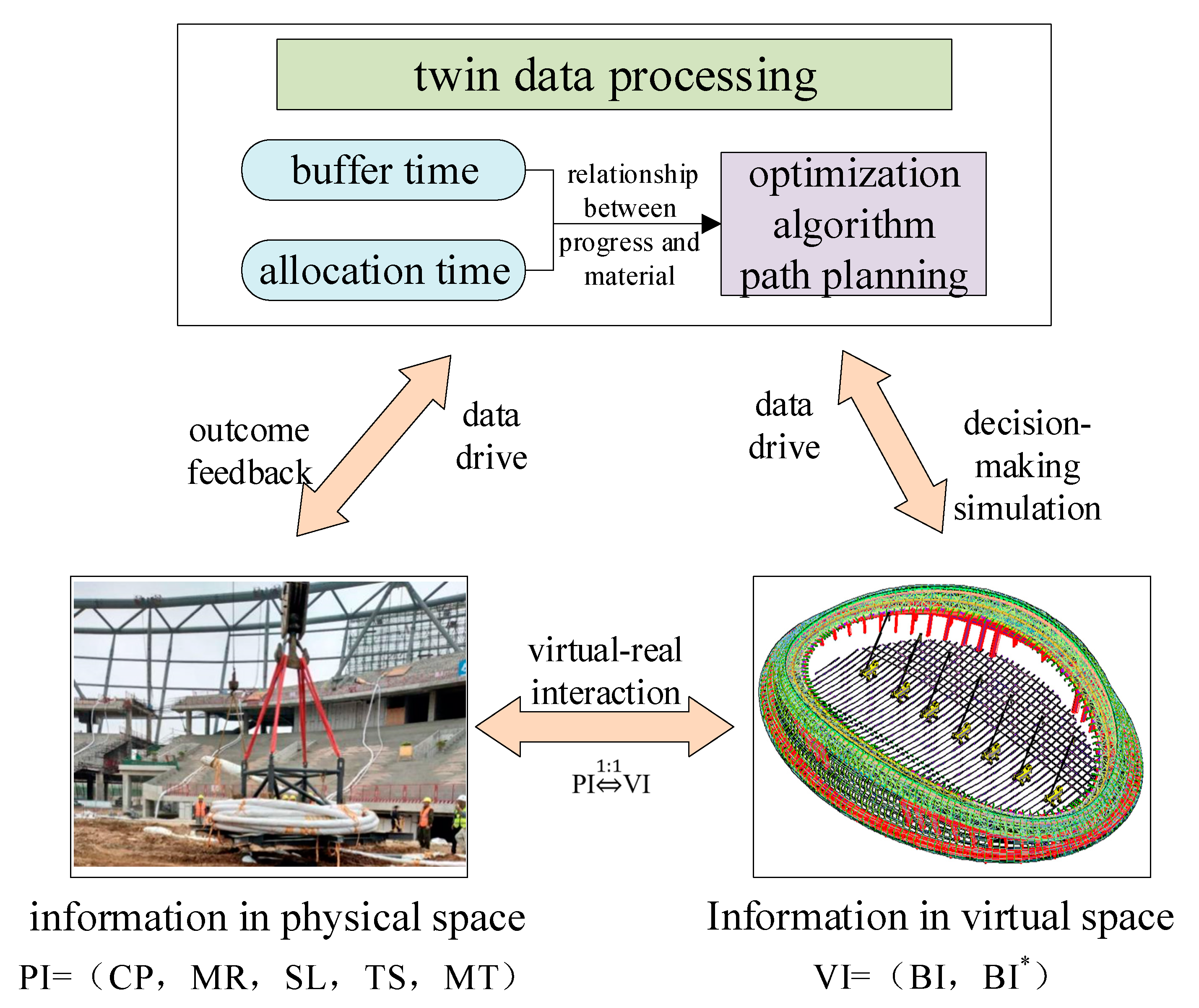
3.3. Information Interaction between Physical Space and Virtual Space
4. Intelligent Planning of Material-Allocation Path Based on Dijkstra Algorithm
4.1. Improvement of Dijkstra Algorithm
- (1)
- There are two initialized sets, namely S and U. The set S contains only the source point v, namely S = {v}, and the shortest path of v is 0. The set U contains other nodes except node v, namely U = {S − v}.
- (2)
- Select a nearest node u from the set U to join the node u in the set S, then the selected distance is the shortest path length from v to u.
- (3)
- Taking node u as the new intermediate point, the shortest path length of each node j in the set U is modified. If the shortest path length (passing node u) from source point v to node j (j∈U) is shorter than the original shortest path (not passing node u), the shortest path length of node j is modified.
- (4)
- Repeat steps (2), (3) until all nodes are contained in the set S.
- (1)
- The layout of each layer is extended to three-dimensional space. Combining with the construction characteristics of sports venues, the nodes from various planes are comprehensively considered. Assuming that there are n planes, the overall analysis object is f = (f1, f2, f3, …, fn). The projection of each plane is used to realize the comprehensive analysis of the construction site.
- (2)
- In the construction process, the nodes between the paths may be in a state of construction blockage or material stacking. If the allocation path needs to pass through these nodes, the time to pass through these nodes needs to be considered, where the node is in a blockage state, and the time to pass through this node is set to be infinite.
- (3)
- It is necessary to comprehensively consider the relationship between the buffer time and allocation time of each node. Equation (13) ensures that each node does not produce the phenomenon of nesting, and finally, evaluates the feasibility of the material deployment path by Equation (14).
- (4)
- Since the construction process is dynamic, in the path analysis, the material allocation time should be corrected in real time according to the changes in factors, such as field distribution information, in the virtual model.
4.2. Intelligent Material-Allocation Path Planning Process
5. Case Study
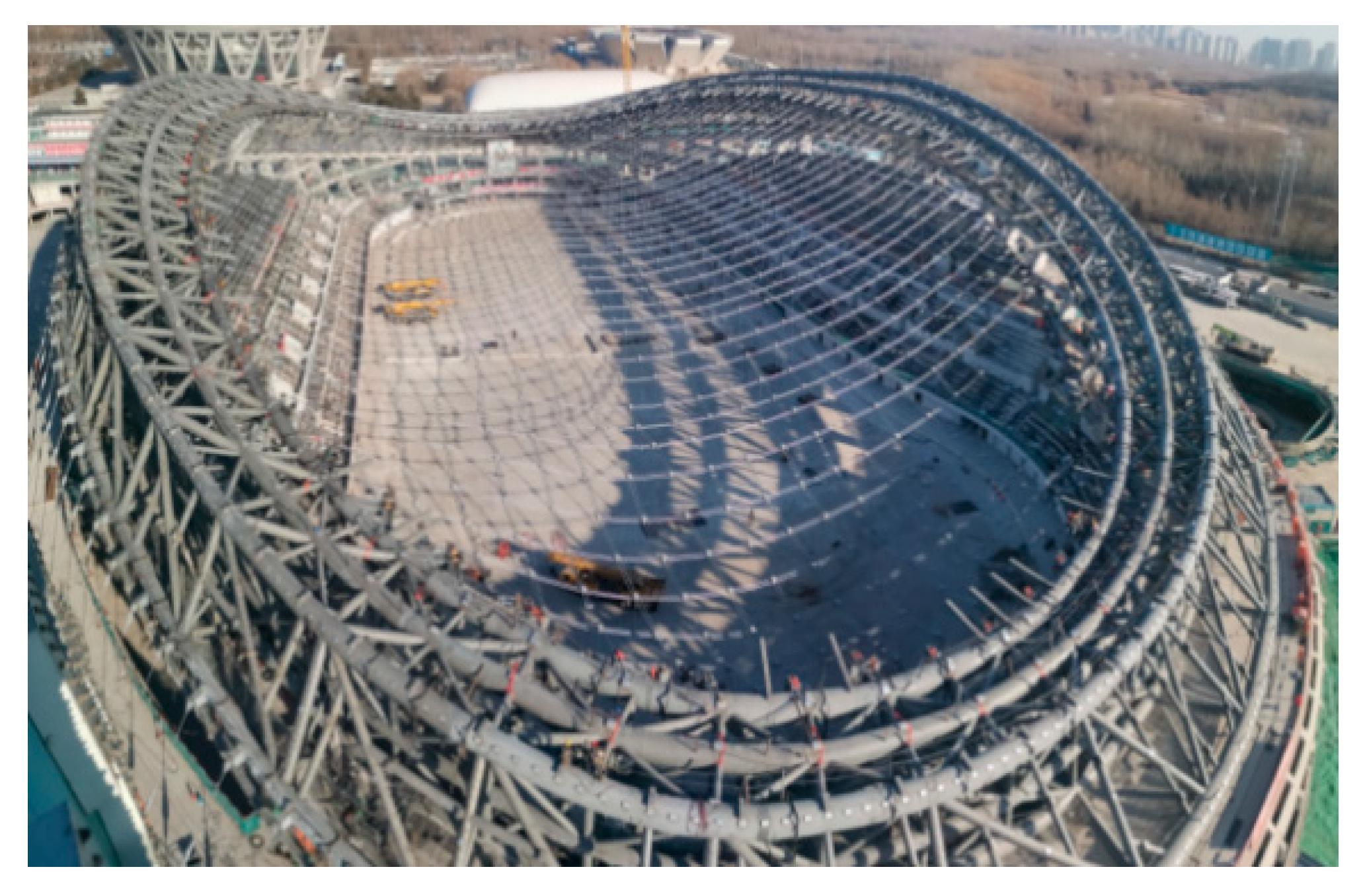
5.1. Engineering Overview
5.2. Virtual–Real Interaction Modeling
5.3. Path Planning
5.4. Effect Analysis
6. Discussion and Conclusions
- (1)
- Through the real-time collection of physical information and the dynamic simulation of virtual space, and by combining an entropy method, data fusion is carried out to form twin data, thus providing reliable data support for the intelligent planning of the material-allocation path in the construction process.
- (2)
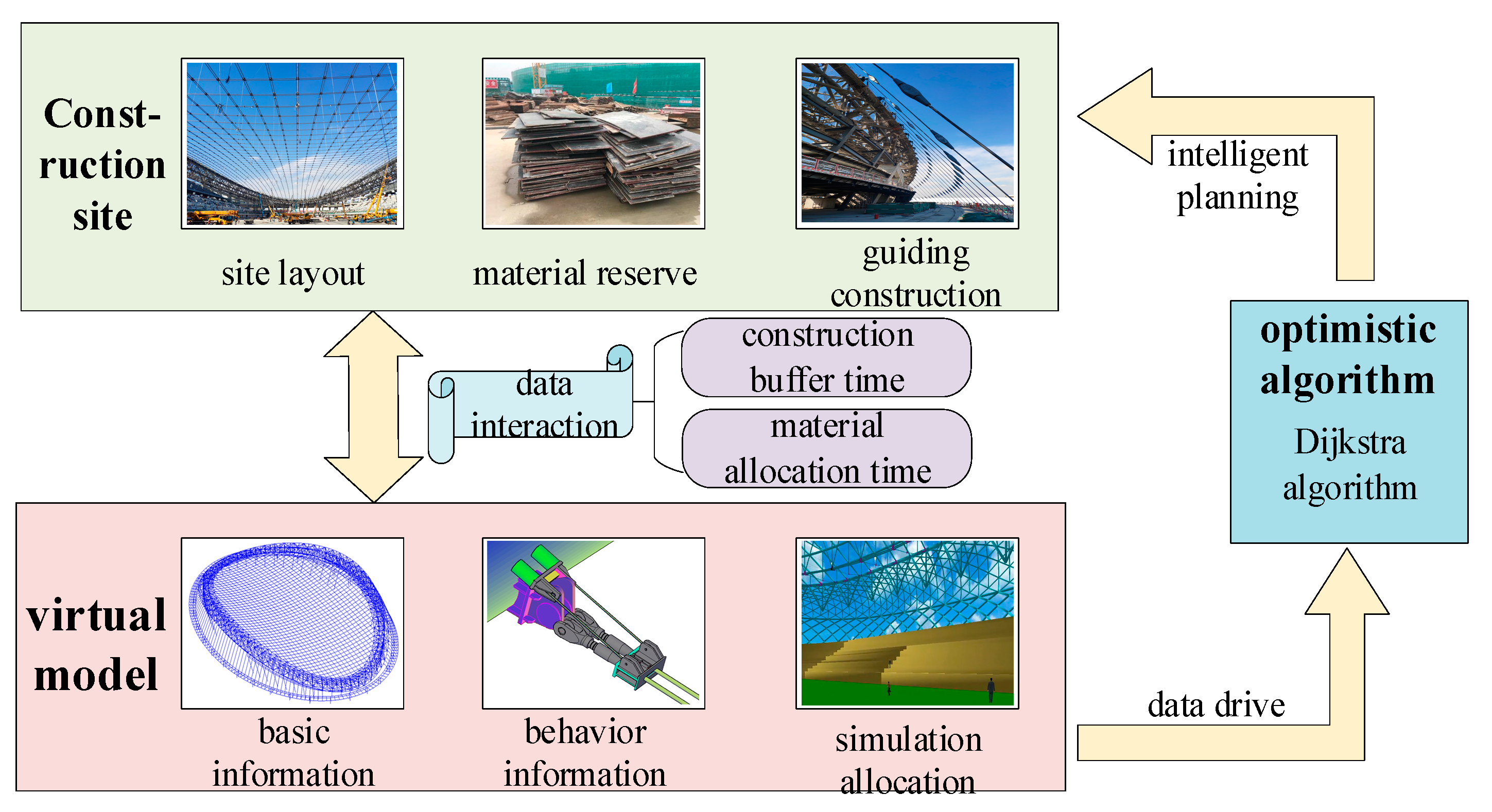
- Based on the establishment of the virtual–real interaction model, the Dijkstra algorithm is used to process the twin data, and the construction buffer time and material allocation time of each node in the construction process are comprehensively considered; this contributes to a complete intelligent planning process of the material-allocation path, which provides technical support for improving the intelligence level of the construction process.
- (3)
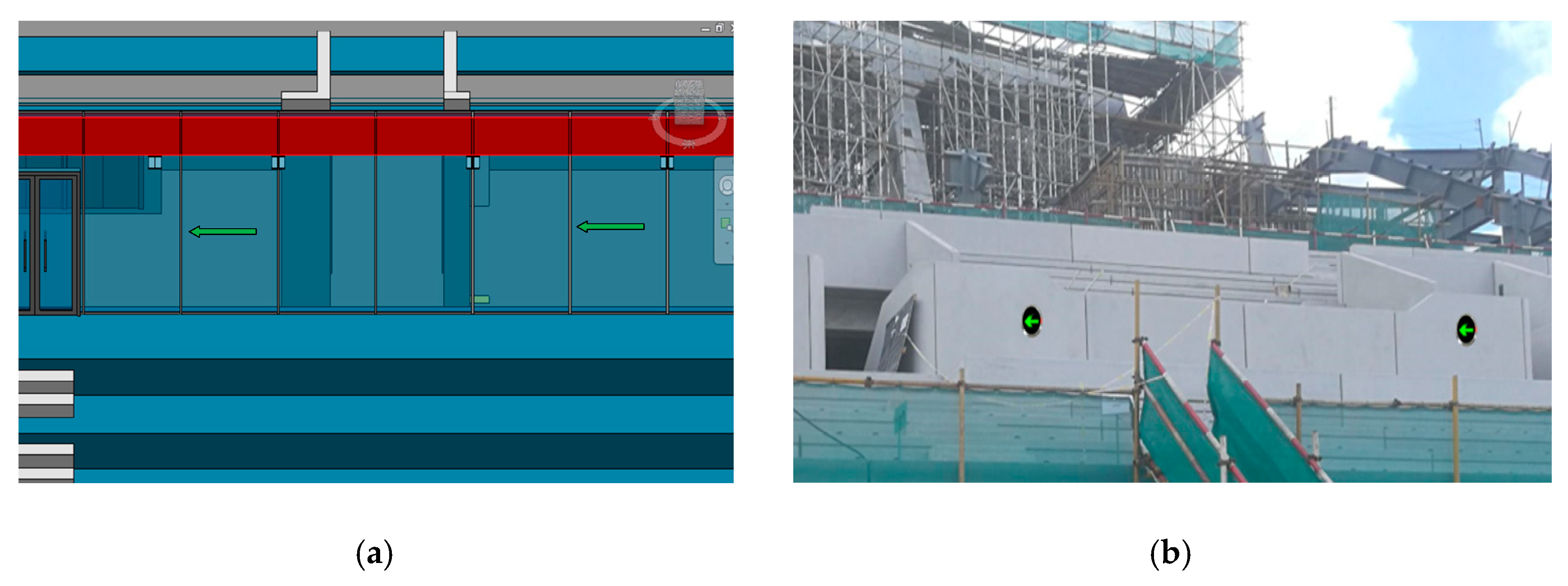
- Through the fusion of the DT concept and the Dijkstra algorithm, the interactive mapping between virtual space and real construction can be realized. Moreover, the feasibility analysis of path planning and the integration of Internet of Things technology for on-site construction guidance can achieve closed-loop control of the construction process; this also offers a reference for virtual space to guide real construction.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Krishnan, S. Structural design and behavior of prestressed cable domes. Eng. Struct. 2020, 209, 110294. [Google Scholar] [CrossRef]
- Moghaddam, M.R.; Khanzadi, M.; Kaveh, A. Multi-objective Billiards-Inspired Optimization Algorithm for Construction Management Problems. Iran. J. Sci. Technol. Trans. Civ. Eng. 2020, 45, 2177–2200. [Google Scholar] [CrossRef]
- Wu, L.; Ji, W.; Feng, B.; Hermann, U.; AbouRizk, S. Intelligent data-driven approach for enhancing preliminary resource planning in industrial construction. Autom. Constr. 2021, 130, 103846. [Google Scholar] [CrossRef]
- An, J.; Mikhaylov, A. Russian energy projects in South Africa. J. Energy S. Afr. 2020, 31, 58–64. [Google Scholar] [CrossRef]
- Goh, M.; Goh, Y.M. Lean production theory-based simulation of modular construction processes. Autom. Constr. 2019, 101, 227–244. [Google Scholar] [CrossRef]
- Sheng, D.; Ding, L.; Zhong, B.; Love, P.E.; Luo, H.; Chen, J. Construction quality information management with blockchains. Autom. Constr. 2020, 120, 103373. [Google Scholar] [CrossRef]
- Moon, J.; Lee, A.; Min, S.D.; Hong, M. An Internet of Things sensor–based construction workload measurement system for construction process management. Int. J. Distrib. Sens. Netw. 2020, 16, 155014772093576. [Google Scholar] [CrossRef]
- You, J.X.; Qin, Y. Critical Chain, Project Schedule Management Based on Bayesian Network Model. J. Tongji Univ. Nat. Sci. 2015, 43, 1606–1612. (In Chinese) [Google Scholar]
- Zhang, W.S.; Wu, Q.; Qi, P.L. Integration Technology of BIM and 3DGIS and Its Application in Railway Bridge Construction. China Railw. Sci. 2019, 40, 45–51. (In Chinese) [Google Scholar]
- Liu, Z.; Shi, G.; Jiang, A.; Li, W. Intelligent Discrimination Method Based on Digital Twins for Analyzing Sensitivity of Mechanical Parameters of Prestressed Cables. Appl. Sci. 2021, 11, 1485. [Google Scholar] [CrossRef]
- Morkovkin, D.E.; Gibadullin, A.A.; Kolosova, E.V.; Semkina, N.S.; Fasehzoda, I.S. Modern transformation of the production base in the conditions of Industry 4.0: Problems and prospects. J. Phys. Conf. Ser. 2020, 1515, 032014. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.; Qi, Q.; Zhang, H.; Sui, F.; Wang, T.; Xu, H.; Huang, Z. Five-dimension digital twin model and its ten applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. (In Chinese) [Google Scholar]
- Liu, J.; Zhuang, C.; Liu, J.; Miao, T.; Wang, J. Online prediction technology of workshop operating status based on digital twin. Comput. Integr. Manuf. Syst. 2021, 27, 467–477. (In Chinese) [Google Scholar]
- Dong, L.T.; Zhou, X.; Zhao, F.B.; He, S.X.; Lu, Z.Y.; Feng, J.M. Key technologies for modeling and simulation of airframe digital twin. Acta Aeronaut. Astronaut. Sin. 2021, 42, 113–141. (In Chinese) [Google Scholar]
- Lee, J. Integration of Digital Twin and Deep Learning in Cyber-Physical Systems: Towards Smart Manufacturing. Manuf. Lett. 2020, 38, 901–910. [Google Scholar] [CrossRef]
- Meraghni, S.; Terrissa, L.S.; Yue, M.; Ma, J.; Jemei, S.; Zerhouni, N. A data-driven digital-twin prognostics method for proton exchange membrane fuel cell remaining useful life prediction. Int. J. Hydrogen Energy 2021, 46, 2555–2564. [Google Scholar] [CrossRef]
- Gopalakrishnan, S.; Hartman, N.W.; Sangid, M.D. Model-Based Feature Information Network (MFIN): A Digital Twin Framework to Integrate Location-Specific Material Behavior Within Component Design. Manuf. Perform. Anal. 2020, 9, 394–409. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436. [Google Scholar] [CrossRef]
- Li, X.S.; Ma, H.W.; Lin, Y.Z. Structural damage identification based on convolution neural network. J. Vib. Shock 2019, 38, 159–167. (In Chinese) [Google Scholar]
- Xu, X.L.; Zhang, Y.; Li, X.H.; Li, Z.J.; Zhang, J.D. Study on damage identification method of reinforced concrete beam based on acoustic emission and deep belief nets. J. Build. Struct. 2018, 39, 400–407. (In Chinese) [Google Scholar]
- Solhmirzaei, R.; Salehi, H.; Kodur, V.; Naser, M.Z. Machine learning framework for predicting failure mode and shear capacity of ultra high performance concrete beams. Eng. Struct. 2020, 224, 111221. [Google Scholar] [CrossRef]
- Valipour, A.; Yahaya, N.; Md Noor, N.; Kildienė, S.; Sarvari, H.; Mardani, A. A fuzzy analytic network process method for risk prioritization in freeway PPP projects: An Iranian case study. J. Civil Eng. Manag. 2015, 21, 933–947. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Zhang, A.S.; Wang, W.S.; Wang, J. Dynamic Fire Evacuation Guidance Method for Winter Olympic Venues Based on Digital Twin-Driven Model. J. Tongji Univ. Nat. Sci. 2020, 48, 962–971. (In Chinese) [Google Scholar]
- An, J.; Mikhaylov, A.; Jung, S.U. Linear Programming approach for robust network revenue management in the airline industry. J. Air Transp. Manag. 2021, 91, 101979. [Google Scholar] [CrossRef]
- Golkhoo, F.; Moselhi, O. Optimized Material Management in Construction using Multi-Layer Perceptron. Can. J. Civ. Eng. 2019, 46, 10. [Google Scholar] [CrossRef]
- Ma, Z.L.; Yang, Z.T. Vehicle Routing Method for Redispatching Parts of Precast Components During Precast Production. J. Tongji Univ. Nat. Sci. 2017, 45, 1446–1453. (In Chinese) [Google Scholar]
- Dong, S.L.; Tu, Y. Structural system innovation of cable dome structures. J. Build. Struct. 2018, 39, 85–92. (In Chinese) [Google Scholar]
- Deng, C. Civil Engineering Management Level Improvement Strategy Based on Information Construction. IOP Conf. Ser. Mater. Sci. Eng. 2020, 780, 032011. [Google Scholar]
- Wang, P.; Luo, M. A digital twin-based big data virtual and real fusion learning reference framework supported by industrial internet towards smart manufacturing—ScienceDirect. J. Manuf. Syst. 2021, 58, 16–32. [Google Scholar] [CrossRef]
- Liu, Z.; Shi, G.; Zhang, A.; Huang, C. Intelligent Tensioning Method for Prestressed Cables Based on Digital Twins and Artificial Intelligence. Sensors 2020, 20, 7006. [Google Scholar] [CrossRef]
- Wu, J.; Sadraddin, H.L.; Ren, R.; Zhang, J.; Shao, X. Invariant Signatures of Architecture, Engineering, and Construction Objects to Support BIM Interoperability between Architectural Design and Structural Analysis. J. Constr. Eng. Manag. 2021, 147, 04020148. [Google Scholar] [CrossRef]
- Salehi, F.; Keyvanpour, M.R.; Sharifi, A. SMKFC-ER: Semi-supervised Multiple Kernel Fuzzy Clustering based on Entropy and Relative entropy. Inf. Sci. 2020, 547, 667–688. [Google Scholar] [CrossRef]
- Mirahadi, F.; Mccabe, B.Y. EvacuSafe: A real-time model for building evacuation based on Dijkstra’s algorithm. J. Build. Eng. 2020, 34, 101687. [Google Scholar] [CrossRef]
- Gao, X.; Pishdad-Bozorgi, P.; Shelden, D.R.; Tang, S. Internet of Things Enabled Data Acquisition Framework for Smart Building Applications. J. Constr. Eng. Manag. 2021, 147, 04020169. [Google Scholar] [CrossRef]
- Chan, A.P.C.; Chiang, Y.H.; Wong, F.K.W.; Liang, S.; Abidoye, F.A. Work–Life Balance for Construction Manual Workers. J. Constr. Eng. Manag. 2020, 146, 04020031. [Google Scholar] [CrossRef]
- Wu, C.; Li, X.; Guo, Y.; Wang, J.; Ren, Z.; Wang, M.; Yang, Z. Natural language processing for smart construction: Current status and future directions. Autom. Constr. 2022, 134, 104059. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Time of Physical Space Analysis (min) | Time of Virtual Space Analysis (min) | Fusion Time (min) |
|---|---|---|---|
| D | 21.5 | 23.9 | 22.7 |
| E | 15.2 | 16.7 | 16.0 |
| G | 30.2 | 32.8 | 31.5 |
| A→B | 6.5 | 7.2 | 6.9 |
| A→C | 2.1 | 2.5 | 2.3 |
| B→C | 2.8 | 3.1 | 3.0 |
| C→B | 3.2 | 3.9 | 3.6 |
| B→D | 5.6 | 6.3 | 6.0 |
| C→D | 7.5 | 6.8 | 7.1 |
| D→B | 7.4 | 8.5 | 8.0 |
| D→C | 9.3 | 10.3 | 9.8 |
| D→E | 4.2 | 3.7 | 3.9 |
| D→F | 4.3 | 3.9 | 4.1 |
| D→G | 4.6 | 5.1 | 4.9 |
| E→D | 7.4 | 8.2 | 7.8 |
| E→G | 6.5 | 5.7 | 6.1 |
| F→D | 6.3 | 5.6 | 5.9 |
| F→G | 5.2 | 4.9 | 5.0 |
| G→D | 7.6 | 6.3 | 6.9 |
| G→E | 4.3 | 3.8 | 4.0 |
| G→F | 7.8 | 6.5 | 7.1 |
| Serial Number | Path | Time Used (min) |
|---|---|---|
| 1 | A→C→D | 9.4 |
| 2 | A→C→D→E | 13.3 |
| 3 | A→C→D→G | 14.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Shi, G.; Qin, J.; Wang, X.; Sun, J. Prestressed Steel Material-Allocation Path and Construction Using Intelligent Digital Twins. Metals 2022, 12, 631. https://doi.org/10.3390/met12040631
Liu Z, Shi G, Qin J, Wang X, Sun J. Prestressed Steel Material-Allocation Path and Construction Using Intelligent Digital Twins. Metals. 2022; 12(4):631. https://doi.org/10.3390/met12040631
Chicago/Turabian StyleLiu, Zhansheng, Guoliang Shi, Jie Qin, Xiangyu Wang, and Junbo Sun. 2022. "Prestressed Steel Material-Allocation Path and Construction Using Intelligent Digital Twins" Metals 12, no. 4: 631. https://doi.org/10.3390/met12040631
APA StyleLiu, Z., Shi, G., Qin, J., Wang, X., & Sun, J. (2022). Prestressed Steel Material-Allocation Path and Construction Using Intelligent Digital Twins. Metals, 12(4), 631. https://doi.org/10.3390/met12040631