

Changes in Lower-Extremity Gait Biomechanics Following High-Cadence Cycling


Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Protocol
2.3. Instrumentation
2.4. Data Analysis
2.5. Statistical Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fukuchi, C.A.; Fukuchi, R.K.; Duarte, M. Effects of walking speed on gait biomechanics in healthy participants: A systematic review and meta-analysis. Syst. Rev. 2019, 8, 153. [Google Scholar] [CrossRef]
- Middleton, A.; Fritz, S.L.; Lusardi, M. Walking speed: The functional vital sign. J. Aging Phys. Act. 2015, 23, 314–322. [Google Scholar] [CrossRef]
- Bączkowicz, D.; Skiba, G.; Czerner, M.; Majorczyk, E. Gait and functional status analysis before and after total knee arthroplasty. Knee 2018, 25, 888–896. [Google Scholar] [CrossRef]
- Tsushima, A.; Ochi, A.; Takaishi, T. Immediate effects of varying cadence in bicycle ergometry on characteristics of gait and lower extremity motor activity in frail older adults. Aging Clin. Exp. Res. 2015, 27, 43–51. [Google Scholar] [CrossRef]
- Okoro, C.A.; Zhong, Y.; Ford, E.S.; Balluz, L.S.; Strine, T.W.; Mokdad, A.H. Association between the metabolic syndrome and its components and gait speed among U.S. adults aged 50 years and older: A cross-sectional analysis. BMC Public Health 2006, 6, 282. [Google Scholar] [CrossRef]
- Thorsen, T.; Oliveira, N.; Graybeal, A.; Stavres, J. Exploring gait velocity as a predictor of cardiometabolic disease risk in young adults. Front. Sports Act. Living 2024, 6, 1365717. [Google Scholar] [CrossRef]
- Bellumori, M.; Uygur, M.; Knight, C.A. High-Speed Cycling Intervention Improves Rate-Dependent Mobility in Older Adults. Med. Sci. Sports Exerc. 2017, 49, 106–114. [Google Scholar] [CrossRef]
- Yang, Y.T.; Yoshida, Y.; Hortobágyi, T.; Suzuki, S. Interaction between thorax, lumbar, and pelvis movements in the transverse plane during gait at three velocities. J. Appl. Biomech. 2013, 29, 261–269. [Google Scholar] [CrossRef]
- Winiarski, S.; Pietraszewska, J.; Pietraszewski, B. Three-Dimensional Human Gait Pattern: Reference Data for Young, Active Women Walking with Low, Preferred, and High Speeds. Biomed Res. Int. 2019, 2019, 9232430. [Google Scholar] [CrossRef]
- Riley, P.O.; Della Croce, U.; Kerrigan, D.C. Propulsive adaptation to changing gait speed. J. Biomech. 2001, 34, 197–202. [Google Scholar] [CrossRef]
- de David, A.C.; Carpes, F.P.; Stefanyshyn, D. Effects of changing speed on knee and ankle joint load during walking and running. J. Sports Sci. 2015, 33, 391–397. [Google Scholar] [CrossRef]
- Kwon, J.W.; Son, S.M.; Lee, N.K. Changes of kinematic parameters of lower extremities with gait speed: A 3D motion analysis study. J. Phys. Ther. Sci. 2015, 27, 477–479. [Google Scholar] [CrossRef]
- Wang, X.; Ma, Y.; Hou, B.Y.; Lam, W.-K. Influence of Gait Speeds on Contact Forces of Lower Limbs. J. Healthc. Eng. 2017, 2017, 6375976. [Google Scholar] [CrossRef]
- Weinhandl, J.T.; Irmischer, B.S.; Sievert, Z.A. Effects of Gait Speed of Femoroacetabular Joint Forces. Appl. Bionics Biomech. 2017, 2017, 6432969. [Google Scholar] [CrossRef]
- Hsiao, H.; Knarr, B.A.; Higginson, J.S.; Binder-Macleod, S.A. The relative contribution of ankle moment and trailing limb angle to propulsive force during gait. Hum. Mov. Sci. 2015, 39, 212–221. [Google Scholar] [CrossRef]
- Keating, C.J.; Hester, R.J.; Thorsen, T.A. High cadence cycling not high work rate, increases gait velocity post-exercise. Sports Biomech. 2024, 1–15. [Google Scholar] [CrossRef]
- Garber, C.E.; Blissmer, B.; Deschenes, M.R.; Deschenes, M.R.; Franklin, B.A.; Lamonte, M.J.; Lee, I.-M.; Nieman, D.C.; Swain, D.P. American College of Sports Medicine position stand. Quantity and quality of exercise for developing and maintaining cardiorespiratory, musculoskeletal, and neuromotor fitness in apparently healthy adults: Guidance for prescribing exercise. Med. Sci. Sports Exerc. 2011, 43, 1334–1359. [Google Scholar] [CrossRef]
- Tyson, S.; Connell, L. The psychometric properties and clinical utility of measures of walking and mobility in neurological conditions: A systematic review. Clin. Rehabil. 2009, 23, 1018–1033. [Google Scholar] [CrossRef]
- Holmes, J.C.; Pruitt, A.L.; Whalen, N.J. Lower extremity overuse in bicycling. Clin. Sports Med. 1994, 13, 187–205. [Google Scholar] [CrossRef]
- Hummer, E.; Thorsen, T.; Zhang, S. Does saddle height influence knee frontal-plane biomechanics during stationary cycling? Knee 2021, 29, 233–240. [Google Scholar] [CrossRef]
- Thorsen, T.; Strohacker, K.; Weinhandl, J.T.; Zhang, S. Increased Q-Factor increases frontal-plane knee joint loading in stationary cycling. J. Sport Health Sci. 2020, 9, 258–264. [Google Scholar] [CrossRef]
- Kristianslund, E.; Krosshaug, T.; Bogert, A.J.V.D. Effect of low pass filtering on joint moments from inverse dynamics: Implications for injury prevention. J. Biomech. 2012, 45, 666–671. [Google Scholar] [CrossRef]
- Grood, E.S.; Suntay, W.J. A joint coordinate system for the clinical description of three-dimensional motions: Application to the knee. J. Biomech. Eng. 1983, 105, 136–144. [Google Scholar] [CrossRef]
- Tirosh, O.; Sparrow, W.A. Identifying heel contact and toe-off using forceplate thresholds with a range of digital-filter cutoff frequencies. J. Appl. Biomech. 2003, 19, 178–184. [Google Scholar] [CrossRef]
- Hoffman, M.; Schrader, J.; Applegate, T.; Koceja, D. Unilateral postural control of the functionally dominant and nondominant extremities of healthy subjects. J. Athl. Train. 1998, 33, 319. [Google Scholar]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Seeley, M.K.; Umberger, B.R.; Shapiro, R. A test of the functional asymmetry hypothesis in walking. Gait Posture 2008, 28, 24–28. [Google Scholar] [CrossRef]
- Brach, J.S.; VanSwearingen, J.M. Vanswearingen, Interventions to Improve Walking in Older Adults. Curr. Transl. Geriatr. Exp. Gerontol. Rep. 2013, 2, 230–238. [Google Scholar] [CrossRef]
- Sayers, S.P. High velocity power training in older adults. Curr. Aging Sci. 2008, 1, 62–67. [Google Scholar] [CrossRef]
- Fang, Y.; Fitzhugh, E.C.; Crouter, S.E.; Gardner, J.K.; Zhang, S. Effects of Workloads and Cadences on Frontal Plane Knee Biomechanics in Cycling. Med. Sci. Sports Exerc. 2016, 48, 260–266. [Google Scholar] [CrossRef]
- Chen, I.; Kuo, K.; Andriacchi, T. The influence of walking speed on mechanical joint power during gait. Gait Posture 1997, 6, 171–176. [Google Scholar] [CrossRef]
- DeVita, P.; Hortobagyi, T. Age causes a redistribution of joint torques and powers during gait. J. Appl. Physiol. 2000, 88, 1804–1811. [Google Scholar] [CrossRef]
- Winter, D.A. Energy generation and absorption at the ankle and knee during fast, natural, and slow cadences. Clin. Orthop. Relat. Res. 1983, 175, 147–154. [Google Scholar] [CrossRef]
- Browne, M.G.; Franz, J.R. The independent effects of speed and propulsive force on joint power generation in walking. J. Biomech. 2017, 55, 48–55. [Google Scholar] [CrossRef]
- Lelas, J.L.; Merriman, G.J.; Riley, P.O.; Kerrigan, D. Predicting peak kinematic and kinetic parameters from gait speed. Gait Posture 2003, 17, 106–112. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| n | Height (m) | Mass (kg) | Age (Years) | |
|---|---|---|---|---|
| Male | 6 | 1.75 ± 0.08 | 75.7 ± 4.6 | 22.6 ± 2.0 |
| Female | 9 | 1.70 ± 0.07 | 68.5 ± 7.8 | 21.7 ± 2.1 |
| PRE | POST | p (d) | |
|---|---|---|---|
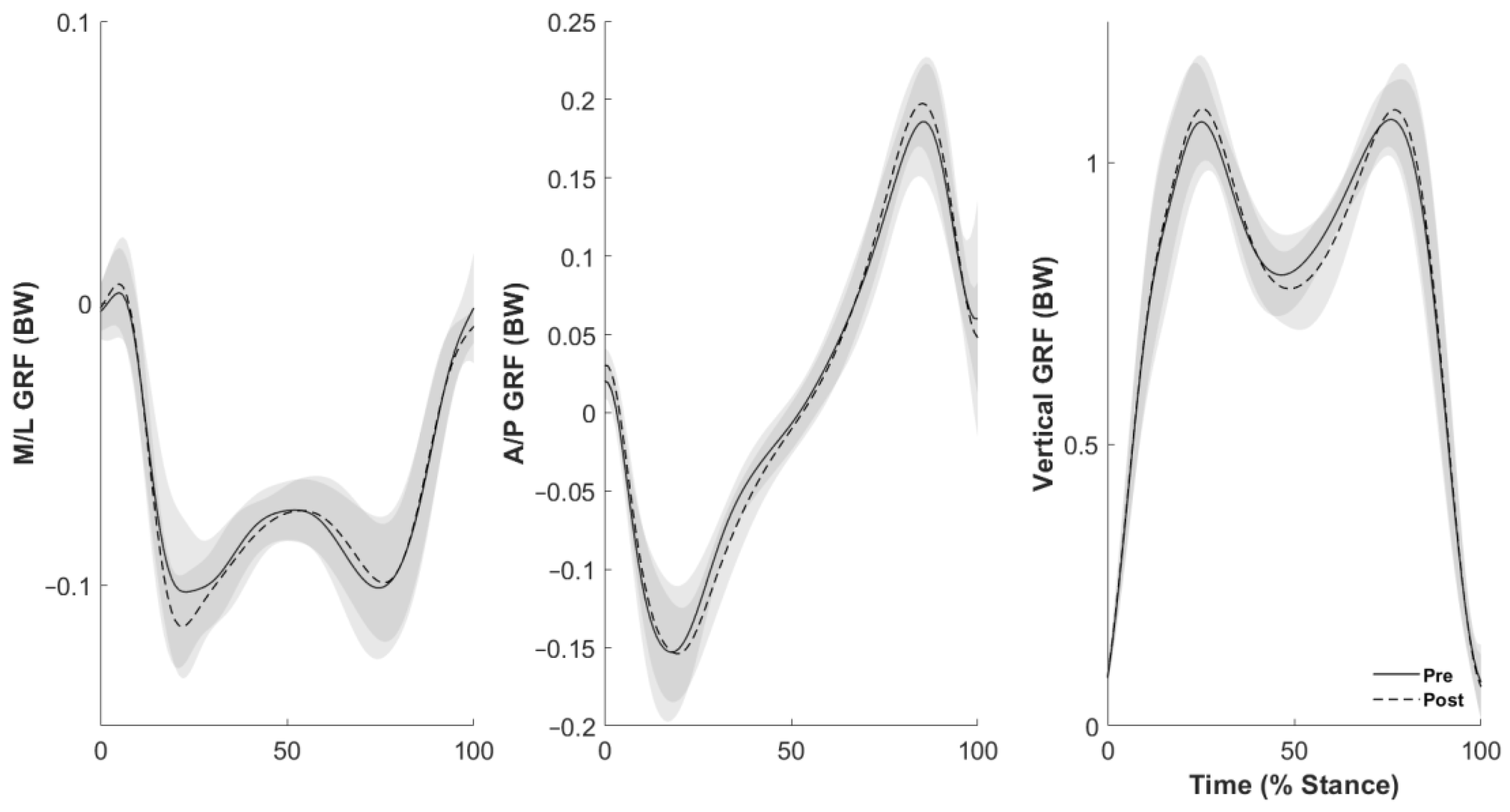
| Peak anterior (propulsive, BW) | 0.20 ± 0.03 | 0.22 ± 0.02 | 0.014 (0.632) |
| Peak posterior (braking, BW) | −0.16 ± 0.04 | −0.16 ± 0.03 | 0.383 (0.079) |
| Peak vertical LR (BW) | 1.10 ± 0.11 | 1.12 ± 0.1 | 0.249 (0.180) |
| Peak vertical PO (BW) | 1.11 ± 0.06 | 1.12 ± 0.07 | 0.107 (0.336) |
| Stance | Swing | |||||
|---|---|---|---|---|---|---|
| PRE | POST | p (d) | PRE | POST | p (d) | |
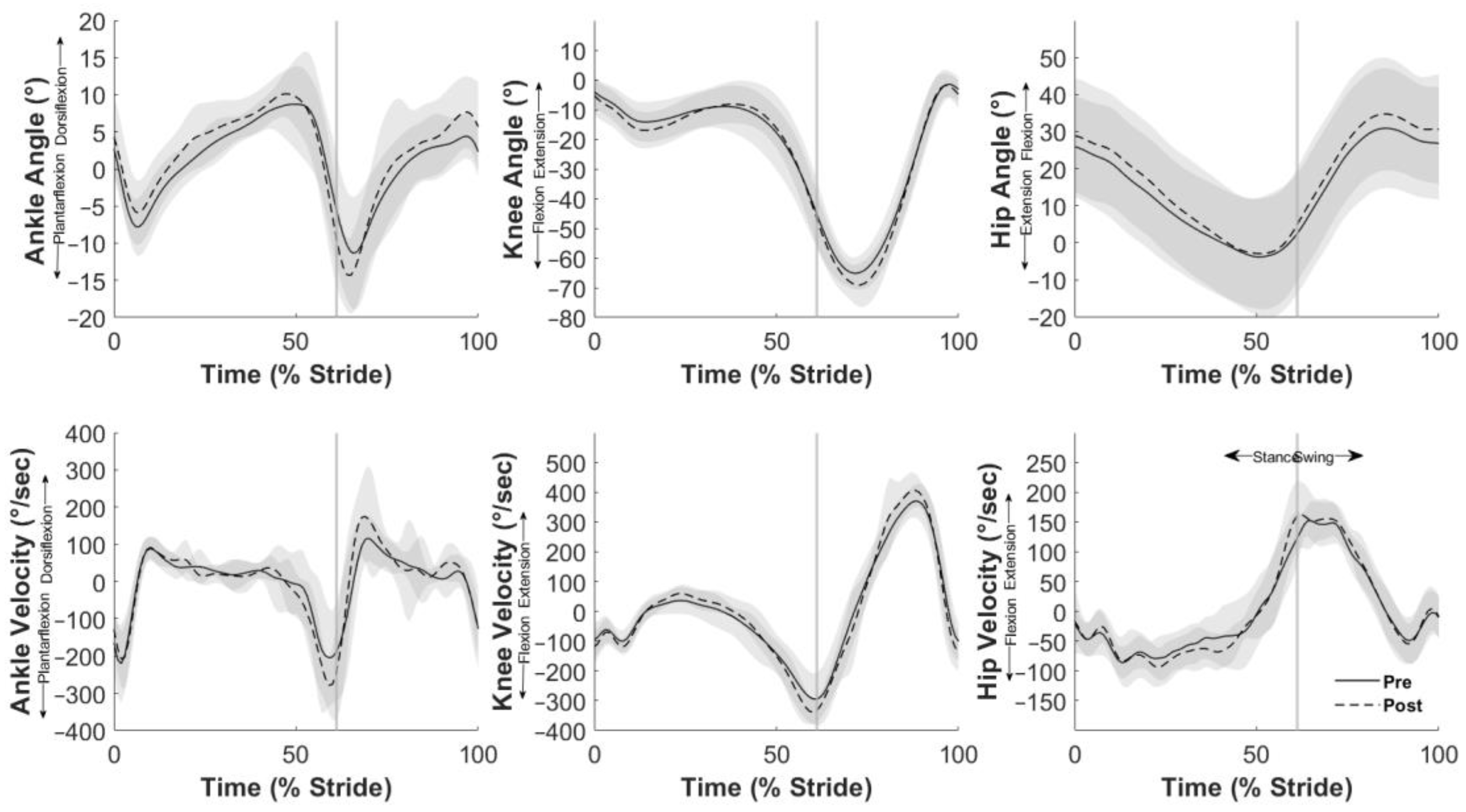
| Peak dorsiflexion angle (°) | 10.5 ± 2.5 | 11.7 ± 3.1 | 0.024 (0.562) | 5.4 ± 3.2 | 7.8 ± 4.6 | 0.012 (0.656) |
| Peak plantarflexion angle (°) | −11.0 ± 2.8 | −9.3 ± 3.5 | 0.005 (0.777) | −15.8 ± 5.4 | −19.3 ± 5.1 | <0.001 (0.779) |
| Peak dorsiflexion velocity (°/s) | 100.9 ± 29.0 | 101.5 ± 28.0 | 0.450 (0.033) | 160.4 ± 66.4 | 198.5 ± 66.1 | <0.001 (0.877) |
| Peak knee extension angle (°) | −6.5 ± 4.1 | −7.8 ± 4.5 | 0.191 (0.302) | 0.80 ± 3.2 | −0.62 ± 4.4 | 0.033 (0.538) |
| Peak knee flexion angle (°) | −42.6 ± 4.8 | −44.2 ± 5.5 | 0.012 (0.655) | −66.3 ± 4.8 | −69.0 ± 5.5 | 0.012 (0.656) |
| Peak knee extension velocity (°/s) | 53.1 ± 25.3 | 61.9 ± 27.5 | 0.007 (0.727) | 387.5 ± 36.2 | 417.3 ± 39.6 | 0.008 (0.700) |
| Peak hip extension angle (°) | −16.9 ± 8.1 | −13.6 ± 8.8 | 0.036 (0.504) | - | - | - |
| Peak hip flexion angle (°) | - | - | - | 24.6 ± 10.4 | 29.1 ± 9.3 | 0.005 (0.775) |
| Peak hip extension velocity (°/s) | −113.9 ± 14.7 | −117.2 ± 22.63 | 0.180 (0.245) | - | - | |
| Peak hip flexion velocity (°/s) | - | - | - | 179.3 ± 18.4 | 197.7 ± 24.5 | 0.003 (0.856) |
| PRE | POST | p (d) | |
|---|---|---|---|
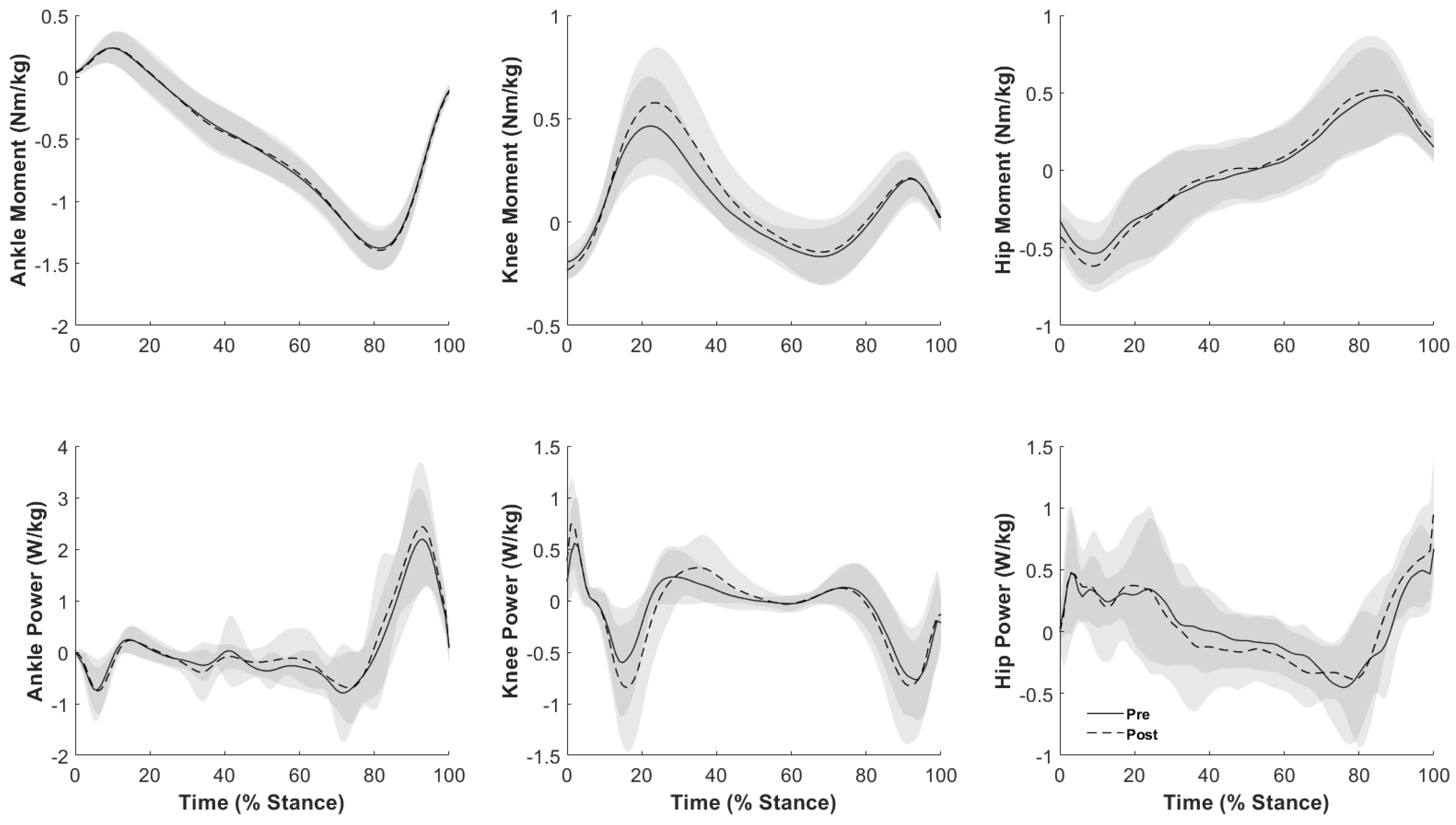
| Peak dorsiflexion moment (Nm/kg) | 0.28 ± 0.11 | 0.26 ± 0.09 | 0.127 (0.308) |
| Peak plantarflexion moment (Nm/kg) | −1.35 ± 0.15 | −1.38 ± 0.014 | 0.067 (0.410) |
| Peak positive power generation (W/kg) | 2.01 ± 0.57 | 2.34 ± 0.54 | 0.001 (1.12) |
| Peak negative power absorption (W/kg) | −0.86 ± 0.32 | −0.87 ± 0.25 | 0.423 (0.051) |
| Peak knee extension moment (Nm/kg) | 0.53 ± 0.24 | 0.59 ± 0.20 | 0.101 (0.346) |
| Peak knee flexion moment (Nm/kg) | −0.25 ± 0.09 | −0.27 ± 0.07 | 0.087 (0.371) |
| Peak knee positive power generation (W/kg) | 0.49 ± 0.24 | 0.56 ± 0.22 | 0.044 (0.475) |
| Peak knee negative power absorption (W/kg) | −1.35 ± 0.46 | −1.29 ± 0.47 | 0.303 (0.137) |
| Peak hip flexion moment (Nm/kg) | 0.53 ± 0.24 | 0.56 ± 0.25 | 0.208 (0.216) |
| Peak hip extension moment (Nm/kg) | −0.59 ± 0.17 | −0.63 ± 0.16 | 0.094 (0.358) |
| Peak hip positive power generation (W/kg) | 0.78 ± 0.23 | 0.87 ± 0.22 | 0.026 (0.596) |
| Peak hip negative power absorption (W/kg) | −0.47 ± 0.24 | −0.56 ± 0.27 | 0.020 (0.642) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thorsen, T.A.; Hester, R.J.; Keating, C.J. Changes in Lower-Extremity Gait Biomechanics Following High-Cadence Cycling. Sports 2024, 12, 159. https://doi.org/10.3390/sports12060159
Thorsen TA, Hester RJ, Keating CJ. Changes in Lower-Extremity Gait Biomechanics Following High-Cadence Cycling. Sports. 2024; 12(6):159. https://doi.org/10.3390/sports12060159
Chicago/Turabian StyleThorsen, Tanner A., Rials J. Hester, and Christopher J. Keating. 2024. "Changes in Lower-Extremity Gait Biomechanics Following High-Cadence Cycling" Sports 12, no. 6: 159. https://doi.org/10.3390/sports12060159
APA StyleThorsen, T. A., Hester, R. J., & Keating, C. J. (2024). Changes in Lower-Extremity Gait Biomechanics Following High-Cadence Cycling. Sports, 12(6), 159. https://doi.org/10.3390/sports12060159