The Application and Development of Static Pressure Air Floating in the Field of Micro-Low-Gravity Simulation Experiments for Spacecraft

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
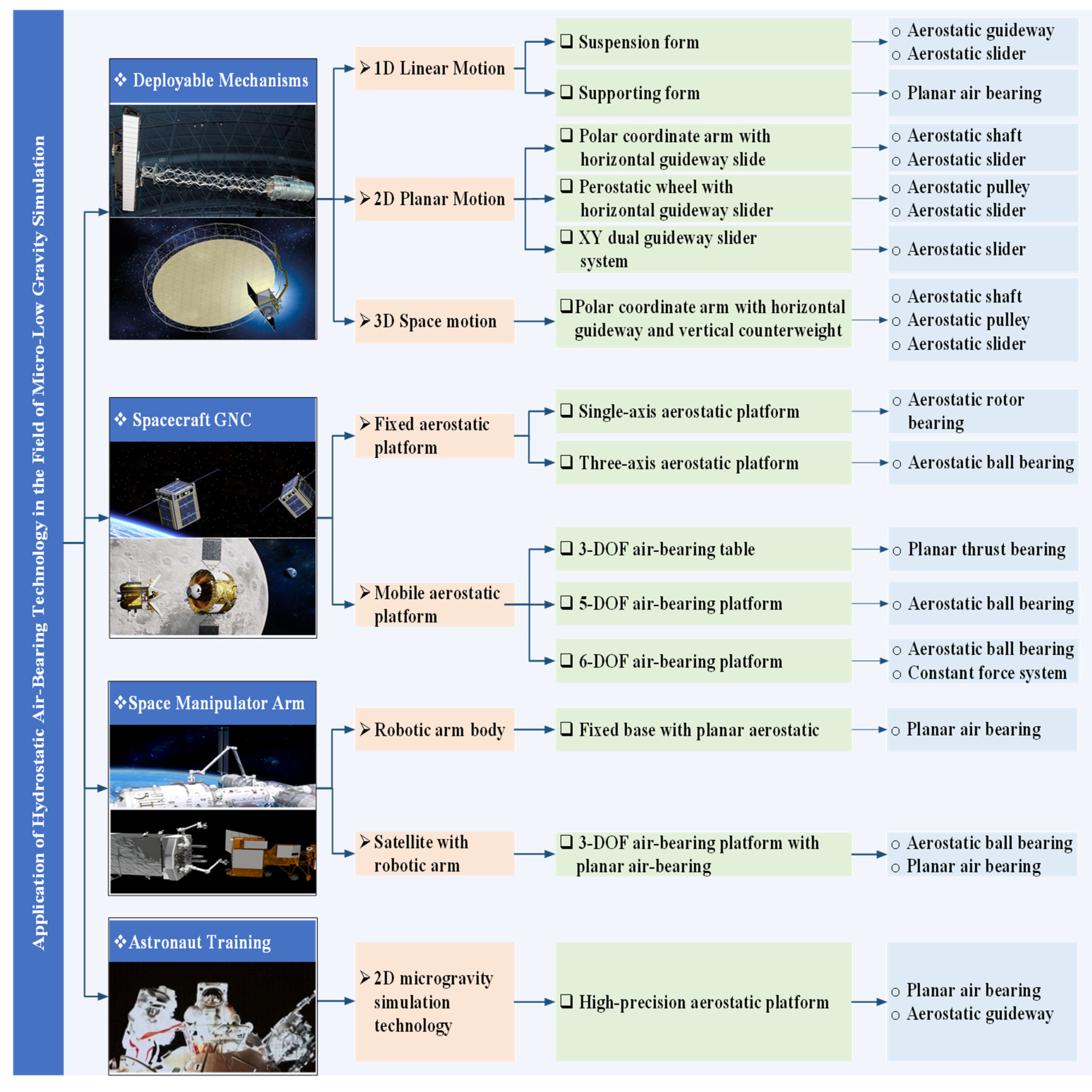
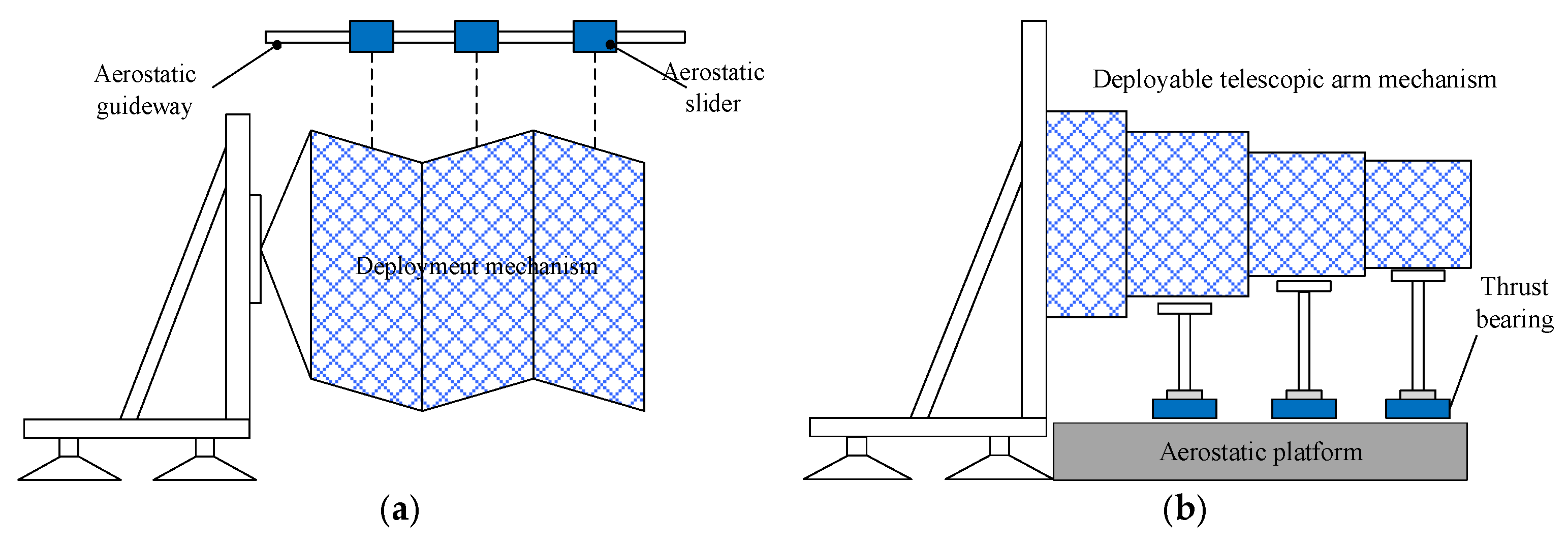
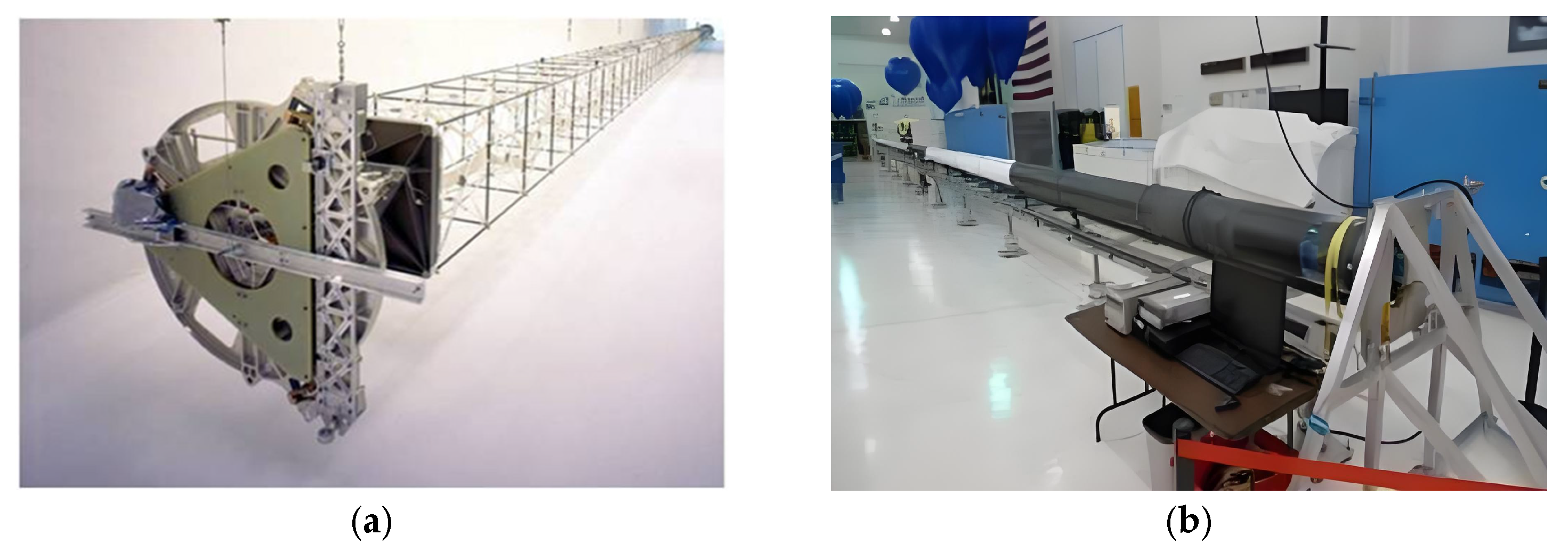
2. Application in the Deployment Mechanisms Micro-Low-Gravity Simulation Experiments
2.1. One-Dimensional Linear Motion Mechanism
2.2. Two-Dimensional Planar Motion Mechanism
2.3. Three-Dimensional Spatial Motion Mechanism
3. Microgravity Simulation Testing for Spacecraft GNC
3.1. Attitude Control Experiments with Fixed Air-Bearing Platforms
3.1.1. Single-Axis Air-Bearing Platform
3.1.2. Triaxial Air-Bearing Platform
3.2. Attitude and Orbit Control Experiments with Movable Air-Floating Stages
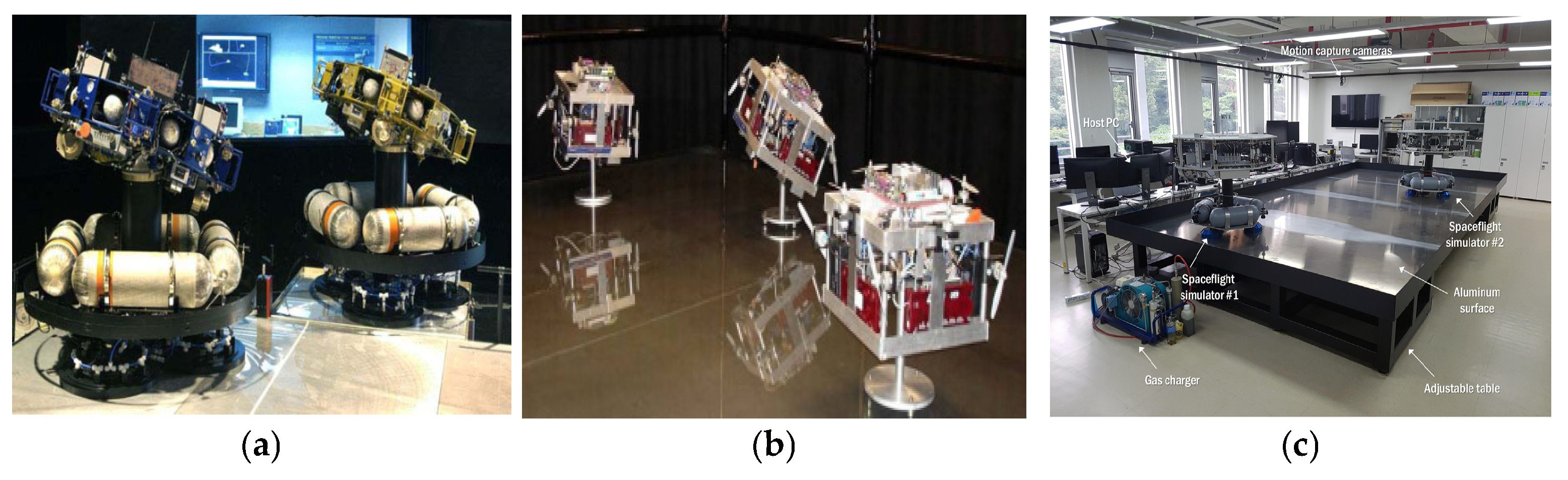
3.2.1. Three-Degree-of-Freedom Air-Floating Platform
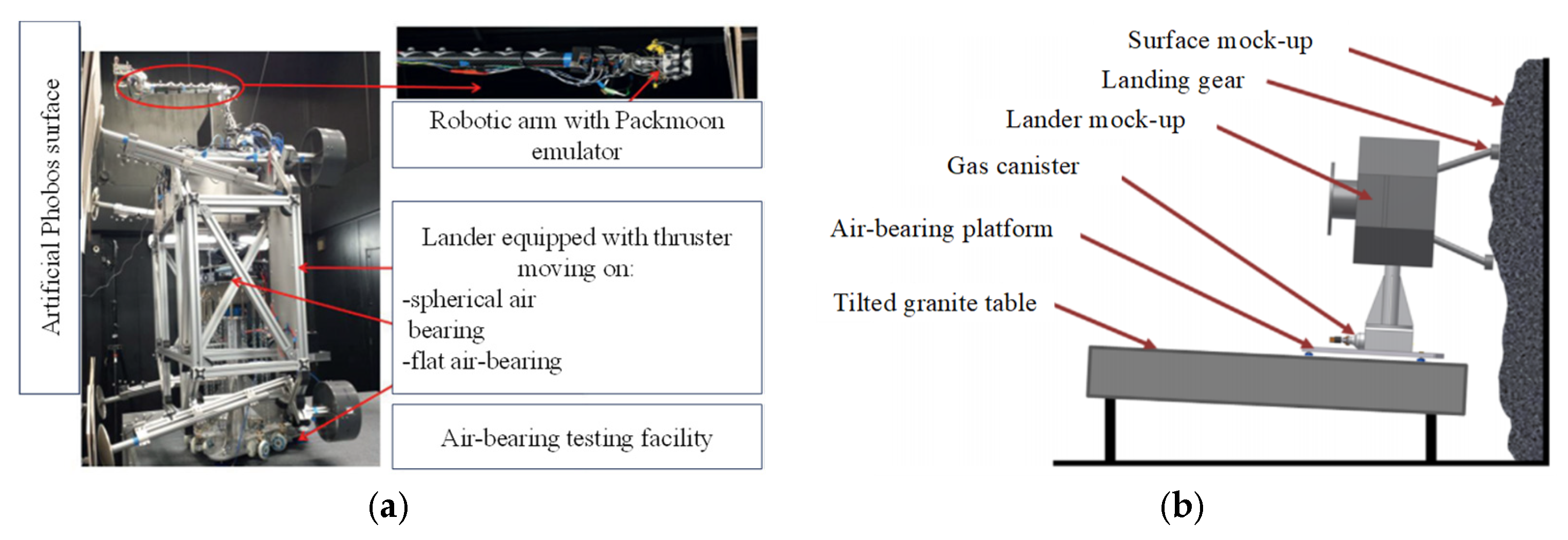
3.2.2. Five/Six-Degree-of-Freedom Air-Floating Platform
4. On-Orbit Operation Microgravity Simulation Experiments for Space Manipulator Arms
4.1. Pneumatic Levitation Testing of the Robotic Arm Manipulator
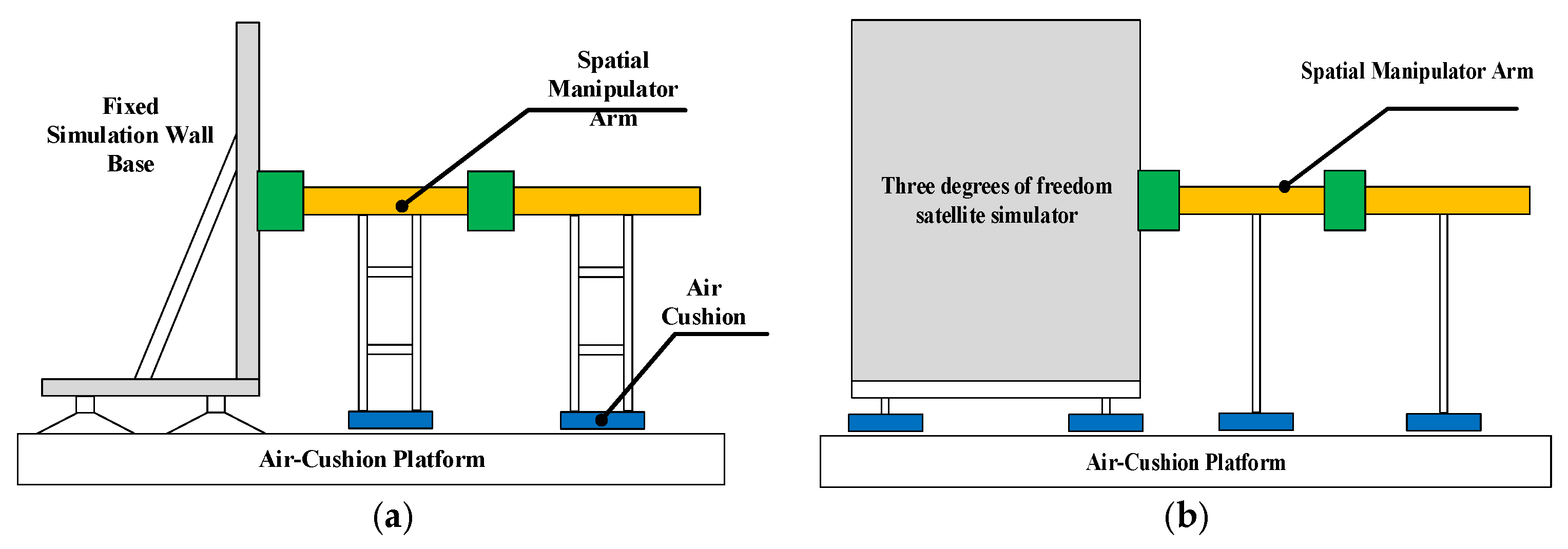
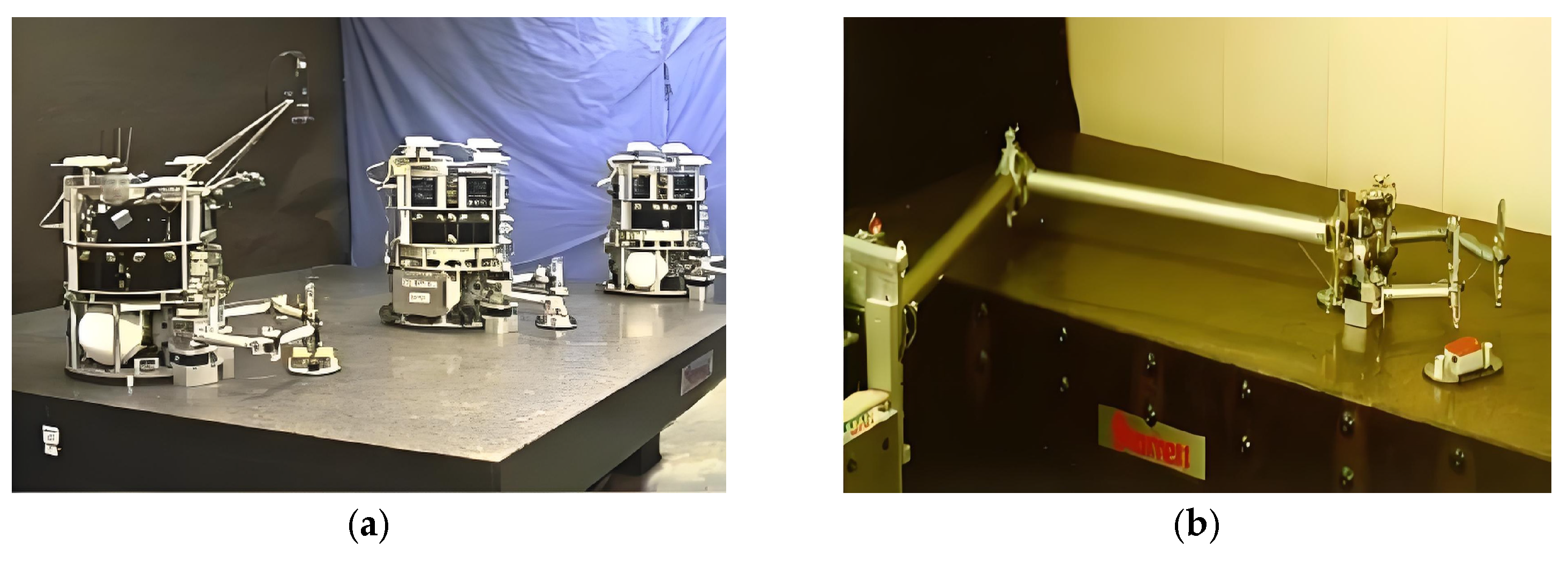
4.2. Coupled Satellite-Robotic Arm Pneumatic Levitation Testing
5. Application of Aerostatic Bearings in Micro-Low-Gravity Simulation for Astronaut Training
6. Trends in the Development of Pneumatic Levitation-Based Microgravity Simulation Technology
6.1. Future Demand Challenges
- (1)
- Ultra-large spacecraft mechanisms: Future ultra-large spacecraft may reach sizes of hundreds of meters or even kilometers, presenting high aspect ratios and large dimensions, which bring technical challenges such as spatial scale adaptability and complex dynamics for ground micro-low-gravity environment simulation systems. Currently, the China Academy of Space Technology has built the world’s largest high-stiffness supported air-bearing platform (30 m × 40 m) [91], which still struggles to meet the micro-low-gravity simulation testing needs for large-scale spacecraft mechanisms at the hundred-meter level. Therefore, it is necessary to develop a new type of movable microgravity simulation platform to meet the ground dynamic testing requirements of ultra-large spacecraft mechanisms.
- (2)
- Heavy-load, high-precision, and high-stability aerostatic levitation: Currently, micro-low-gravity simulation and testing based on aerostatic levitation can cover a load capacity ranging from kilograms to tons [92,93,94]. The Beijing Institute of Control Engineering and the Tianjin Institute of Aerospace Mechanical and Electrical Equipment have developed large three-axis aerostatic platforms supported by spherical aerostatic bearings, with a load capacity of 10 tons and a composite disturbance torque of 10−4 Nm. With the advancement of space engineering projects such as on-orbit servicing and maintenance, and deep-space exploration, future spacecraft payloads are expected to reach tens to hundreds of tons [95], while aerostatic bearing technology also faces higher demands for low disturbance torque and high stability. Optimizing gas flow within limited dimensions, suppressing aerostatic vibration, and maximizing the effective aerostatic bearing area and gas film pressure is key to the design of heavy-load, high-performance aerostatic bearings.
- (3)
- Extreme service environments: The current operating environment for air bearings is generally at normal temperature and pressure. To meet more realistic service environment simulation requirements, it is necessary to further develop the hydrostatic air-bearing technology for high and low temperature and vacuum environments.
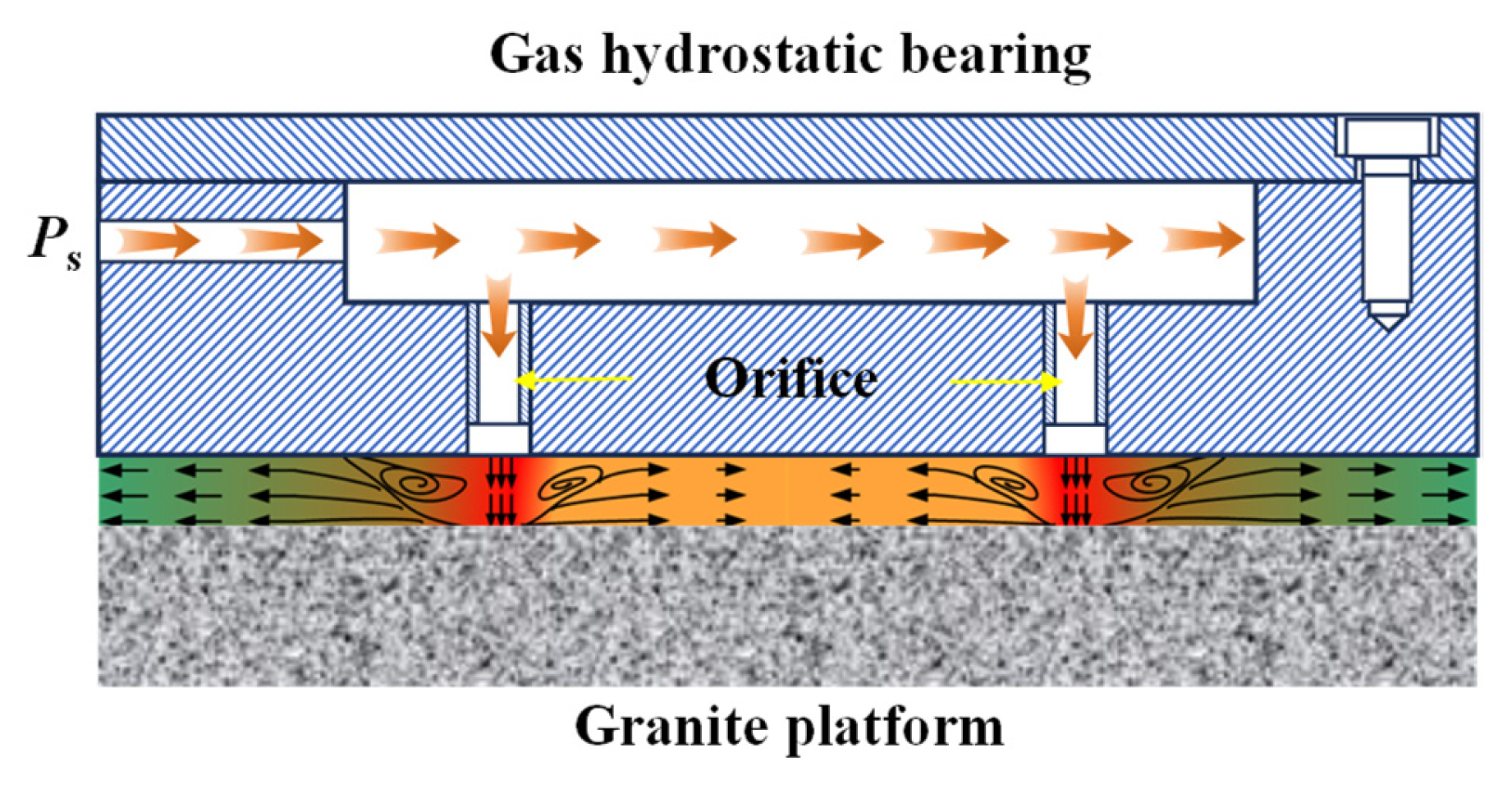
6.2. Vibration Suppression Mechanism Analysis
- (1)
- Vibration mechanism under multi-field coupling: In response to the demands for simulating complex aerospace conditions, there is a growing need to emphasize the application of multi-physics coupling analysis methods, such as the integration of fluid dynamics with structural mechanics and thermodynamics. During preliminary experiments on the dynamic characteristics of aerostatic bearings under vacuum conditions, it was observed that aerostatic bearings exhibited significantly intense self-excited vibrations in a vacuum environment [101]. With the advancement of space technology, the application of static pressure air bearings in vacuum environments is set to increase. Looking ahead to the testing requirements for future vacuum microgravity environments, it is essential to further investigate the vibration mechanisms of aerostatic bearing under vacuum and rarefied air conditions [102]. By establishing multi-physics coupling models, it is possible to comprehensively and accurately simulate the complex practical working conditions of aerostatic bearings. This approach can deeply investigate the interactions between gas flow, structural deformation, environmental pressure, and temperature changes, as well as their effects on vibration characteristics. This research will provide more robust support for vibration suppression methods in special environments.
- (2)
- High-precision modeling and numerical simulation: Numerical simulation techniques have been widely used in characterizing the static and dynamic properties of aerostatic bearings and elucidating the mechanisms of pneumatic hammers. The Reynolds equation, a fundamental theory of aerostatic bearings, enables the convenient calculation of key performance indicators like bearing load capacity and stiffness [16,20,103,104]. To analyze the internal flow characteristics of aerostatic bearings, Computational Fluid Dynamics (CFD) simulation is used for numerical calculations. Considering turbulence effects enhances the accuracy of calculating gas micro-disturbance features within the flow field [18]. In order to satisfy the demands of high-stability and high-precision microgravity simulation experiments for spacecraft, it is essential to further clarify the vibration mechanism of aerostatic bearings. Due to the advantages of depicting the complex gas flow and minor fluctuations within aerostatic bearings, high-precision turbulence models like Large Eddy Simulation (LES) [105,106,107] and Direct Numerical Simulation (DNS) [108] are more widely applied. Future research should focus on achieving a balance between simulation accuracy and computational efficiency to reduce development time. Additionally, the scale and accuracy of numerical simulations will continue to improve, allowing for detailed simulations of larger and more complex aerostatic systems.
- (3)
- Intelligent optimization and design: In order to meet the customized testing requirements of spacecraft and shorten the development cycle, intelligent optimization algorithms are used to optimize the structure and parameters of aerostatic bearing, achieving multi-objective optimization of load capacity, stability, and lift. Enhancing the static and dynamic characteristics of aerostatic bearing through intelligent optimization design, as well as improving development efficiency, is also one of the future research directions for aerostatic bearing.
6.3. Precision Machining Technology
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tian, D.K.; Fan, X.D.; Zheng, X.J.; Liu, R.Q.; Guo, H.W.; Deng, Z.Q. Research status and prospect of micro-gravity environment simulation for space deployable antenna. J. Mech. Eng. 2021, 57, 11–25. [Google Scholar]
- Santaguida, L.; Zhu, Z.H. Development of air-bearing microgravity testbed for autonomous spacecraft rendezvous and robotic capture control of a free-floating target. Acta Astronaut. 2023, 203, 319–328. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Sun, X.Y.; Zhou, Q.H.; Zou, B.; Liu, G.F. An air floating suspension microgravity simulator for multi-specification of spaceborne SAR. In Proceedings of the 2nd China International SAR Symposium (CISS), Shanghai, China, 3–5 November 2021; pp. 1–7. [Google Scholar]
- Gao, H.B.; Niu, F.L.; Liu, Z.; Yu, H.T.; Yu, N. Suspended micro-low gravity environment simulation technology: Status quo and prospect. Acta Aeronaut. Astronaut. Sin. 2021, 42, 523911. [Google Scholar]
- Qi, N.M.; Sun, K.; Wang, Y.B.; Liu, Y.F.; Huo, M.Y.; Yao, W.R.; Gao, P. Micro/Low gravity simulation and experiment technology for spacecraft. J. Astronaut. 2020, 41, 770–779. [Google Scholar]
- Jia, B.; Bian, W.; Peng, N. Experiments on simulation microgravity of composite deployable antenna. IOP Conf. Ser. Mater. Sci. Eng. 2019, 631, 042019. [Google Scholar] [CrossRef]
- Choi, H.S.; Kim, D.Y.; Park, J.H.; Lim, J.H.; Jang, T.S. Modeling and validation of a passive Truss-Link mechanism for deployable structures considering friction compensation with response surface methods. Appl. Sci. 2022, 12, 451. [Google Scholar] [CrossRef]
- Li, G. A survey of GNC critical techniques for development of China spacecraft in the future. Aerosp. Control Appl. 2009, 35, 1–5+12. [Google Scholar]
- Zhou, M.L.; Hu, H.C.; Xu, S.H. Microgravity simulator based on air levitation for astronauts EVA operation training. Appl. Mech. Mater. 2014, 577, 443–446. [Google Scholar]
- Jin, J.; Sun, X.; Yu, D.; Chen, Z. Research on Ground Microgravity Simulation System Based on Parallel Mechanism. Microgravity Sci. Technol. 2024, 36, 5. [Google Scholar] [CrossRef]
- Machairas, K.; Andreou, S.; Paraskevas, I.; Papadopoulos, E. Extending the NTUA space robot emulator for validating complex on-orbit servicing tasks. In Proceedings of the 12th Symposium on Advanced Space Technologies in Robotics and Automation, Noordwijk, The Netherlands, 15–17 May 2013; p. 7. [Google Scholar]
- Yang, F.; Yuan, X.G. Ground simulation method of space microgravity environment. In Proceedings of the 7th National Environmental Control Academic Exchange Conference, Beijing, China, 13–14 August 2002. [Google Scholar]
- Liu, W.T. Key Technologies of the Astronauts EVA Operation Training Equipment in Microgravity Environment; Beijing Jiaotong University: Beijing, China, 2012. [Google Scholar]
- Akin, D.; Sullivan, B. A survey of serviceable spacecraft failures. In Proceedings of the AIAA Space 2001 Conference and Exposition, Albuquerque, NM, USA, 28–30 August 2001; p. 4540. [Google Scholar]
- Shi, S.C.; Wu, J.W.; Cui, P.Y.; Liu, H. Global reaction optimization of space manipulator and its ground test. Robot 2009, 31, 242–247. [Google Scholar]
- Liu, T. Aerostatic Gas Lubrication; Harbin Institute of Technology Press: Harbin, China, 1990. [Google Scholar]
- Feng, H.; Hou, Y.; Chen, R.; Liu, H. Research progress of aerostatic gas lubrication technology in China. Lubr. Seal. 2011, 36, 107–113. [Google Scholar]
- Feng, K.; Wang, G.; Li, W.; An, C.; Hou, W.; Hao, Y.; Li, P. Research progress and applications of aerostatic gas bearings. J. Vib. Eng. 2024, 1–18. Available online: https://link.cnki.net/urlid/32.1349.TB.20241017.1800.003 (accessed on 8 June 2025).
- Rowe, W.B. Hydrostatic, Aerostatic and Hybrid Bearing Design; Butterworth-Heinemann: Oxford, UK; Waltham, MA, USA, 2012. [Google Scholar]
- Wang, Y. Theory of Gas Lubrication and Design of Gas Bearings; China Machine Press: Beijing, China, 1999. [Google Scholar]
- Fan, G.; Li, Y.; Li, Y.; Zang, L.; Zhao, M.; Li, Z.; Yu, H.; Xu, J.; Liang, H.; Zhang, G.; et al. Research on Design and Optimization of Micro-Hole Aerostatic Bearing in Vacuum Environment. Lubricants 2024, 12, 224. [Google Scholar] [CrossRef]
- Meguro, A.; Shintate, K.; Usui, M.; Tsujihata, A. In-orbit deployment characteristics of large deployable antenna reflector onboard Engineering Test Satellite VIII. Acta Astronaut. 2009, 65, 1306–1316. [Google Scholar] [CrossRef]
- Şener, R.; Koç, M.A.; Ermiş, K. Hybrid ANFIS-PSO algorithm for estimation of the characteristics of porous vacuum preloaded air bearings and comparison performance of the intelligent algorithm with the ANN. Eng. Appl. Artif. Intell. 2024, 128, 107460. [Google Scholar] [CrossRef]
- Cong, Q. An investigation into gravity compensation equipment for space mechanisms. Spacecr. Environ. Eng. 2012, 29, 92–99. [Google Scholar]
- Cebeci, Y. Design of HIDAM: Highly Deployable Articulated Mast for Positioning of Satellite Components; Izmir Institute of Technology: Urla, Turkey, 2022. [Google Scholar]
- Mobrem, M.; Spier, C. Design and performance of the telescopic tubular mast. In Proceedings of the 41st Aerospace Mechanisms Symposium, Pasadena, CA, USA, 16–18 May 2012; pp. 127–140. [Google Scholar]
- Eggers, P.; Cruissen, H.J. Fokker space solar array deployment rigs. In Proceedings of the 33rd Aerospace Mechanisms Symposium, Pasadena, CA, USA, 19–21 May 1999; pp. 405–417. [Google Scholar]
- Wu, Y.M.; Luo, Q.; Wang, X.; Liu, Y.; Sun, J.H. Design and verification of air-floating suspension gravity compensation device for solar wing. J. Mech. Eng. 2020, 56, 149–155. [Google Scholar]
- Moghaddam, B.M.; Chhabra, R. On the guidance, navigation and control of in-orbit space robotic missions: A survey and prospective vision. Acta Astronaut. 2021, 184, 70–100. [Google Scholar] [CrossRef]
- Hu, H.X.; Tang, L.; Shi, H. Research and Development of Numerical Simulation Techniques for Spacecraft GNC System. Aerosp. Control Appl. 2016, 42, 1–8. [Google Scholar]
- McQuain, R.H. Space Applications 1966; National Aeronautics and Space Administration: Washington, DC, USA, 1967. [Google Scholar]
- Lin, X.L.; Zhang, X.B. New Development of Spacecraft Simulation Technique and Its Application. Comput. Integr. Manuf. Syst. 1996, 13, 13–20. [Google Scholar]
- Schwartz, J.L.; Peck, M.A.; Hall, C.D. Historical review of air-bearing spacecraft simulators. J. Guid. Control Dyn. 2003, 26, 513–522. [Google Scholar] [CrossRef]
- Zhang, X.B.; Zeng, H.B.; Zhang, J.J.; Li, J.; Mu, X.; Zhu, Z. The Physical Simulation Technology for Spacecraft. Aerosp. Control 2015, 33, 72–78+82. [Google Scholar]
- Wilde, M.; Clark, C.; Romano, M. Historical survey of kinematic and dynamic spacecraft simulators for laboratory experimentation of on-orbit proximity maneuvers. Prog. Aerosp. Sci. 2019, 110, 100552. [Google Scholar] [CrossRef]
- Zhang, J.J.; Mou, X.G.; Li, J.S. Full Physics Simulation for Large Spacecraft Single Gimble Control Moment Gyro System. J. Syst. Simul. 2002, 14, 394–396. [Google Scholar]
- Liu, R.; Zhou, J.; Liu, Y.Y.; Guo, J. Design and practice of case-based “Spacecraft large angle maneuver” physical simulation experiment. Exp. Technol. Manag. 2021, 38, 210–213. [Google Scholar]
- Xu, B.; Shi, J.Y.; Zhang, J.; Zhao, C.; Hou, W.; Zhao, B. Design and Implementation of the Test System for the Super-Large Inertia Spacecraft’s Micro-low Gravity Simulation. J. Mech. Des. 2022, 39, 107–113. [Google Scholar]
- Li, J.S.; Mou, X.G.; Sun, W.D.; Yang, T.; Li, T. Full physical simulation system of large satellite triaxial air floating platform. Control Eng. 2001, 3, 22–26. [Google Scholar]
- Radzykewycz, D.; Fausz, J.; James, W. Energy storage technology development at the air force research laboratory space vehicles directorate. In Proceedings of the Space Technology Conference and Exposition, Albuquerque, NM, USA, 28–30 September 1999; p. 4503. [Google Scholar]
- Peck, M.A.; Miller, L.; Cavender, A.R.; Gonzalez, M.; Hintz, T. An airbearing-based testbed for momentum control systems and spacecraft line of sight. Adv. Astronaut. Sci. 2003, 114, 427–446. [Google Scholar]
- Ciarcia, M.; Cristi, R.; Romano, M.M. Emulating scaled Clohessy–Wiltshire dynamics on an air-bearing spacecraft simulation testbed. J. Guid. Control Dyn. 2017, 40, 2496–2510. [Google Scholar] [CrossRef]
- Liu, Y.F.; Liu, X.F.; Qi, N.M. Hardware-in-loop simulation platform with super-low disturbance torque for attitude control system of micro-and nano-satellite. Syst. Eng. Electron. 2017, 39, 1808–1814. [Google Scholar]
- Chen, M.; Jin, G.; Xu, K.; Dai, L.; Mu, X. Design of a Miniature Triaxial Air-Floating Table Attitude Determination System. J. Syst. Simul. 2012, 24, 2102–2107. [Google Scholar]
- Chen, H.L.; Zhou, J.; Liu, Y.Y.; Mu, X. Method for Flexible Satellite Dynamics Simulation on Three-Axis Air-Bearing Table. J. Astronaut. 2011, 32, 940–946. [Google Scholar]
- Chen, H.L.; Zhou, J.; Liu, Y.Y.; Mu, X. Dynamics modeling of Three-Axis air-bearing table with rotatable appendages. J. Northwestern Polytech. Univ. 2010, 28, 332–337. [Google Scholar]
- Hong, Z.Q.; Song, X.Z.; Lv, W.; Zhong, W.; Wang, T. High-accuracy joint identification technique for moment of inertia and interference torque of large-scale three-axis air-bearing simulator. Spacecr. Environ. Eng. 2017, 34, 28–34. [Google Scholar]
- Li, Z.; Cao, Z.; Duan, W.; Du, Y.; Liu, H. The Analysis and Compensation of Elastic Unbalance Torque of the Three-axis Air-bearing Simulator. In Journal of Physics: Conference Series; IOP Publishing: Beijing, China; Volume 2095, p. 012083.
- Smith, G.A. Dynamic simulators for test of space vehicle attitude control systems. In Conference on the Role of Simulation in Space Technology; Virginia Polytechnic Institute: Blacksburg, Virginia, 1965; pp. 1–20. [Google Scholar]
- Zhang, H.L.; Liao, X.; Li, B.; Wei, S.; Pei, Y.; Hui, J. Research on Performance Validation of Aircraft Based on Air-table. J. Syst. Simul. 2018, 30, 3739–3746. [Google Scholar]
- Huo, M.Y. Formation Flying Satellite Physical Simulation System Design and Analysis; Harbin Institute of Technology: Harbin, China, 2011. [Google Scholar]
- Mantellato, R.; Lorenzini, E.C.; Sternberg, D.; Roascio, D.; Saenz-Otero, A.; Zachrau, H. Simulation of a tethered microgravity robot pair and validation on a planar air bearing. Acta Astronaut. 2017, 138, 579–589. [Google Scholar] [CrossRef]
- Zhao, M. Design of a Six-Degree-of-Freedom Air-Floating Platform Control System; Harbin Institute of Technology: Harbin, China, 2014. [Google Scholar]
- Sabatini, M.; Palmerini, G.B.; Monti, R.; Gasbarri, P. Image based control of the “PINOCCHIO” experimental free flying platform. Acta Astronaut. 2014, 94, 480–492. [Google Scholar] [CrossRef]
- Cho, D.M.; Jung, D.; Tsiotras, P. A 5-dof experimental platform for spacecraft rendezvous and docking. In Proceedings of the AIAA Infotech@ Aerospace Conference, Washington, DC, USA, 6–9 April 2009. [Google Scholar]
- Chung, S.J.; Kong, E.; Miller, D. Dynamics and control of tethered formation flight spacecraft using the SPHERES testbed. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, San Francisco, CA, USA, 15–18 August 2005; p. 6089. [Google Scholar]
- Chung, S.J.; Lobosco, D.; Miller, D.; Blaurock, C. Multidisciplinary control of a sparse interferometric array satellite testbed. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Boston, MA, USA, 9–22 August 2013; p. 5433. [Google Scholar]
- Zappulla, R.; Virgili Llop, J.; Park, H.; Zagaris, C.; Romano, M. Floating spacecraft simulator test bed for the experimental testing of autonomous guidance, navigation, & control of spacecraft proximity maneuvers and operations. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Long Beach, CA, USA, 13–16 September 2016; p. 5268. [Google Scholar]
- Rybus, T.; Seweryn, K. Planar air-bearing microgravity simulators: Review of applications, existing solutions and design parameters. Acta Astronaut. 2016, 120, 239–259. [Google Scholar] [CrossRef]
- Zhang, J.R.; Xia, H.W.; Ma, G.C.; Zhang, D.; Yang, C.; Zhang, H. Design and Implementation of a Spacecraft Cluster Ground Simulation Test System. In Proceedings of the 39th Chinese Control Conference, Shenyang, China, 27–29 July 2020; Volume 5, pp. 7867–7871. [Google Scholar]
- Chen, X.; Yao, W.; Huang, Y.; Zhao, Y. A Common Ground Experiment Testbed for Synthetic Mission Demonstration of Small Satellites. In Proceedings of the Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, 10–13 August 2009. [Google Scholar]
- Lee, H.; Sasi, P.V.; Sanyal, A. Dynamics and control of a six degrees of freedom ground simulator for autonomous rendezvous and proximity operation of spacecraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4926. [Google Scholar]
- Xu, J. Research on the Development of a Five-Degree-of-Freedom Air-Floating Simulation Test Rig and Its Key Technologies; Harbin Institute of Technology: Harbin, China, 2010. [Google Scholar]
- Gallardo, D.; Bevilacqua, R.; Rasmussen, R. Advances on a 6 degrees of freedom testbed for autonomous satellites operations. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, OR, USA, 8–11 August 2011; p. 6591. [Google Scholar]
- Saulnier, K.; Perez, D.; Tilton, G.; Gallardo, D.; Shake, C.; Huang, R.; Bevilacqua, R. Operational capabilities of a six degrees of freedom spacecraft simulator. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; p. 5253. [Google Scholar]
- Colia, R. Preliminary Design of a Floating Spacecraft Simulator for a Hardware-in-the-Loop Testbed with a Matching Plane to Simulate Reduced Gravity Conditions. Master’s Thesis, Politecnico di Torino, Torino, Italty, 2025. [Google Scholar]
- Xu, J.; Bao, G.; Yang, Q.; Li, J. Design and development of a 5-DOF air-bearing spacecraft simulator. In Proceedings of the 2009 International Asia Conference on Informatics in Control, Automation and Robotics, Bangkok, Thailand, 1–2 February 2009; pp. 126–130. [Google Scholar]
- Saulnier, K.; Perez, D.; Huang, R.C.; Gallardo, D.; Tilton, G.; Bevilacqua, R. A six-degree-of-freedom hardware-in-the-loop simulator for small spacecraft. Acta Astronaut. 2014, 105, 444–462. [Google Scholar] [CrossRef]
- Regehr, M.W.; Acikmese, A.B.; Ahmed, A.; Aung, M.; Clark, K.C.; MacNeal, P.; Shields, J.; Singh, G.; Bailey, R.; Bushnell, C.; et al. The formation control testbed. In Proceedings of the 2004 IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 6–13 March 2004; Volume 1, pp. 557–564. [Google Scholar]
- Veres, S.; Lincoln, N.; Gabriel, S. Testbed for satellite formation flying control system verification. In Proceedings of the AIAA Infotech@ Aerospace 2007 Conference and Exhibit, Rohnert Park, CA, USA, 7–10 May 2007; p. 2953. [Google Scholar]
- Eun, Y.; Park, S.Y.; Kim, G.N. Development of a hardware-in-the-loop testbed to demonstrate multiple spacecraft operations in proximity. Acta Astronaut. 2018, 147, 48–58. [Google Scholar] [CrossRef]
- Li, Z. Research and Implementation of Key Control Technologies for Air-Floating Platform Systems; Harbin Institute of Technology: Harbin, China, 2016. [Google Scholar]
- Chen, Z.G.; Wang, W.Y.; Zhang, G.Y. Optimization Design and Experimental Research of Attitude Simulation Device for Docking Simulation Test Rig. J. Mech. Eng. 2006, 42, 202–205. [Google Scholar] [CrossRef]
- Seweryn, K.; Paśko, P.; Visentin, G. The prototype of regolith sampling tool dedicated to low gravity planetary bodies. In Advances in Mechanism and Machine Science, Proceedings of the 15th IFToMM World Congress on Mechanism and Machine Science 15, Krakow, Poland, 30 June–4 July 2019; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 2711–2720. [Google Scholar]
- Xue, Z.H.; Liu, J.G. A Survey of Research on Space Manipulator Manipulation Technology. Robotics 2022, 44, 107–128. [Google Scholar]
- Dong, Q.; Zhang, L.J.; Yi, W.M.; Wan, B.; Meng, S.; Hu, R. Kinematics Feedforward Based Control of Multi-Pinhole Assembly for Space Robots with Compliance. J. Mech. Eng. 2019, 55, 207–217. [Google Scholar] [CrossRef]
- Srivastava, R.; Sah, R.; Das, K. Free floating and rotation floating approaches for control of space robots: A comparative study. In Proceedings of the 2022 IEEE Aerospace Conference (AERO), Big Sky, MT, USA, 5–12 March 2022; pp. 1–12. [Google Scholar]
- Chen, A.G. Exploiting Contact Dynamics for Grasping and Anchoring in the Field; Stanford University: Stanford, CA, USA, 2023. [Google Scholar]
- Qu, C.C. Research and Implementation of Ground-Based Microgravity Simulation System for Space Manipulator; Harbin Institute of Technology: Harbin, China, 2014. [Google Scholar]
- Perera, J.; Visinsky, M.; Laske, E.; Artemiadis, P.; Salazar, G.; Seyedmadani, K.; Schmida, E.; Steele, M.; Mensah, I., Jr. Robotic systems safety. In Safety Design for Space Systems; Butterworth-Heinemann: Oxford, UK; Waltham, MA, USA, 2023; pp. 1033–1082. [Google Scholar]
- Cruissen, H.J.; Ellenbroek, M.; Henderson, M.; Petersen, H.; Verzijden, P.; Visser, M. The european robotic arm: A high-performance mechanism finally on its way to space. In Proceedings of the 42nd Aerospace Mechanisms Symposium, Baltimore, MD, USA, 14–16 May 2014. [Google Scholar]
- Suthar, B.; Jung, S. Conceptual Design of an Extendable Rope-Inspired Module Space Orbit Arm for Maneuvering: ERM-SOA. In Proceedings of the 46th Aerospace Mechanisms Symposium, Houston, TX, USA, 11–13 May 2022; p. 337. [Google Scholar]
- Zhang, W.H. Research on Neural Network Trajectory Tracking Control and Microgravity Simulation Methods for Space Robots; Harbin Institute of Technology: Harbin, China, 2012. [Google Scholar]
- Ma, B.; Jiang, Z.; Liu, Y.; Xie, Z. Advances in space robots for on-orbit servicing: A comprehensive review. Adv. Intell. Syst. 2023, 5, 2200397. [Google Scholar] [CrossRef]
- Yoshida, K.; Wilcox, B. Space robots. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1031–1063. [Google Scholar]
- Mitros, Z.; Sadati, S.M.H.; Henry, R.; Da Cruz, L.; Bergeles, C. From theoretical work to clinical translation: Progress in concentric tube robots. Annu. Rev. Control Robot. Auton. Syst. 2022, 5, 335–359. [Google Scholar] [CrossRef]
- Matunaga, S.; Yoshihara, K.; Takahashi, T.; Tsurumi, S.; Ui, K. Ground experiment system for dual-manipulator-based capture of damaged satellites. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Takamatsu, Japan, 31 October–5 November 2000; Volume 3, pp. 1847–1852. [Google Scholar]
- Smith, C.; Seagram, J. Free-flyer capture-New robotic challenges from the international space station. J. Br. Interplanet. Soc. 2007, 60, 339–346. [Google Scholar] [CrossRef]
- Stoycos, L.E.; Klute, G.K. An Analysis of the Loads Applied to a Heavy Space Station Rack During Translation and Rotation Tasks; No. NASA-TM-104790; National Aeronautics and Space Administration (NASA): Washington, DC, USA, 1994. [Google Scholar]
- Zhao, Q.; Qiang, M.; Hou, Y.; Chen, S.; Lai, T. Research developments of aerostatic thrust bearings: A review. Appl. Sci. 2022, 12, 11887. [Google Scholar] [CrossRef]
- Xu, B.; Zhao, C.; Zhang, J.; Wang, L.; Li, B.; Zhao, B. Research on Precision Assembly Technology of Large Super Flat Support Platform for Spacecraft Low Gravity Simulation. Aeronaut. Manuf. Technol. 2021, 64, 66–73. [Google Scholar]
- Yu, H.; Kou, X.; Hou, W.; Zang, L.; Zhang, G.; Wang, W.; Yan, L.; Hao, Y. Research on the aerostatic rotary table for micro-gravity test based on micro-orifice throttling. J. Meas. Eng. 2024, 12, 591–608. [Google Scholar] [CrossRef]
- Schwartz, J.L. The Distributed Spacecraft Attitude Control System Simulator-from Design Concept to Decentralized Control. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, Virginia, 2004. [Google Scholar]
- Wapman, J.D.; Sternberg, D.C.; Lo, K.; Wang, M.; Jones-Wilson, L.; Mohan, S. Jet propulsion laboratory small satellite dynamics testbed planar air-bearing propulsion system characterization. J. Spacecr. Rocket. 2021, 58, 954–971. [Google Scholar] [CrossRef]
- Zhang, J.; Wei, C.; He, Y. Modeling and Distributed Control of In-Orbit Assembly for Ultra-Large Spacecraft in Solar Power Stations. In Proceedings of the 9th National Conference on Dynamics of Multibody Systems and the 4th National Conference on Aerospace Dynamics and Control, Wuhan, China, 17–18 October 2015; p. 129. [Google Scholar]
- Majumdar, B.C. Dynamic characteristics of externally pressurized rectangular porous gas thrust bearings. J. Lubr. Tech. 1976, 98, 181–186. [Google Scholar] [CrossRef]
- Jiang, S.; Yang, S.; Yin, Z.; Xu, C. Static and dynamic characteristics of externally pressurized annular porous gas thrust bearings. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2016, 230, 1221–1230. [Google Scholar] [CrossRef]
- Kong, K.; Tao, J.; Ji, F. Experimental Study on the Air Hammer Vibration Phenomenon of Small-Orifice Throttling Gas Static Pressure Bearings. Lubr. Seal. 2013, 38, 66–70. [Google Scholar]
- Chang, S.H.; Chan, C.W.; Jeng, Y.R. Numerical Analysis of Discharge Coefficients in Aerostatic Bearings with Orifice-Type Restrictors. Tribol. Int. 2015, 90, 157–163. [Google Scholar] [CrossRef]
- Ye, Y. Research on the Vibration Characteristics of Aerostatic Support in Ultra-Precision Motion Stages; Huazhong University of Science and Technology: Wuhan, China, 2010. [Google Scholar]
- Kou, X.; Yu, H.; Zang, L.; Li, G.; Hou, Y.; Li, P.; Zhang, G.; Hou, W. Static and Dynamic Characteristics of Micro-Orifice Throttle Gas Static Pressure Thrust Bearings in Vacuum Environment. J. Mech. Eng. 2025, 61, 87–96. [Google Scholar]
- Wu, J.; Wang, J.; Zheng, J.; Zhao, P.; Gao, X.; Wen, Z. Research Advances in Vacuum Gas Static Pressure Bearings. J. Mech. Eng. 2025, 61, 13–25. [Google Scholar]
- Al-Bender, F. Air Bearings: Theory, Design and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar]
- Shigeki, T. Gas Bearings: Design, Fabrication, and Applications; Aerospace Press: Tokyo, Japan, 1988. [Google Scholar]
- Li, Y.; Lin, Y.; Zhu, H. Analysis of Low-Amplitude Self-Excited Vibration Characteristics of Hydrostatic Gas Thrust Bearings Based on Large Eddy Simulation. J. Mech. Eng. 2013, 49, 56–62. [Google Scholar] [CrossRef]
- Zhu, J.; Han, C.; Chen, X. Large eddy simulation of vortex shedding and pressure fluctuation in aerostatic bearings. J. Fluids Struct. 2013, 40, 42–51. [Google Scholar] [CrossRef]
- Zhao, M.; Zhao, Z.; Cheng, C.; Liu, Z.; Hou, W.; Yan, L.; Li, Z.; Chen, S.; Xu, L. Proper orthogonal decomposition analysis of flow characteristics of aerostatic bearings based on Large Eddy Simulation. Aerosp. Sci. Technol. 2024, 153, 109438. [Google Scholar] [CrossRef]
- Zhang, C.; Ao, H.; Jiang, H. Static and dynamic bearing performances of hybrid gas dynamic bearings. Tribol. Int. 2021, 160, 107036. [Google Scholar] [CrossRef]
- Tai, Y.; Chen, D.; Zhao, X.; Zhang, J.A. Simulation and Analysis of Throttle Performance of Microporous Aerostatic Bearing Based on CFD. Int. J. Fluid Dyn. 2019, 7, 1–10. [Google Scholar] [CrossRef]
- Yu, H.C.; Wang, G.Z.; Wang, W.B. Research on parameters design of micro-orifice restrictor aerostatic thrust bearings based on fluent. Mach. Tool Hydraul. 2018, 46, 130–133. [Google Scholar]
- Lan, M. Research on Static and Dynamic Characteristics of Micro-Orifice Throttling Gas Static Pressure Bearings; Harbin Institute of Technology: Harbin, China, 2020. [Google Scholar]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zang, L.; Hou, W.; Liu, L.; Hu, H.; Wang, X.; Jia, Y.; Hao, Y.; Li, Y.; Zhao, B. The Application and Development of Static Pressure Air Floating in the Field of Micro-Low-Gravity Simulation Experiments for Spacecraft. Lubricants 2025, 13, 258. https://doi.org/10.3390/lubricants13060258
Zang L, Hou W, Liu L, Hu H, Wang X, Jia Y, Hao Y, Li Y, Zhao B. The Application and Development of Static Pressure Air Floating in the Field of Micro-Low-Gravity Simulation Experiments for Spacecraft. Lubricants. 2025; 13(6):258. https://doi.org/10.3390/lubricants13060258
Chicago/Turabian StyleZang, Libin, Weijie Hou, Lei Liu, Haixia Hu, Xingze Wang, Yong Jia, Yongbo Hao, Yuehua Li, and Baoshan Zhao. 2025. "The Application and Development of Static Pressure Air Floating in the Field of Micro-Low-Gravity Simulation Experiments for Spacecraft" Lubricants 13, no. 6: 258. https://doi.org/10.3390/lubricants13060258
APA StyleZang, L., Hou, W., Liu, L., Hu, H., Wang, X., Jia, Y., Hao, Y., Li, Y., & Zhao, B. (2025). The Application and Development of Static Pressure Air Floating in the Field of Micro-Low-Gravity Simulation Experiments for Spacecraft. Lubricants, 13(6), 258. https://doi.org/10.3390/lubricants13060258