Rolling Bearing Fault Diagnosis across Operating Conditions Based on Unsupervised Domain Adaptation



Abstract
:1. Introduction
2. Theoretical Foundation
2.1. Fast Fourier Transform (FFT)
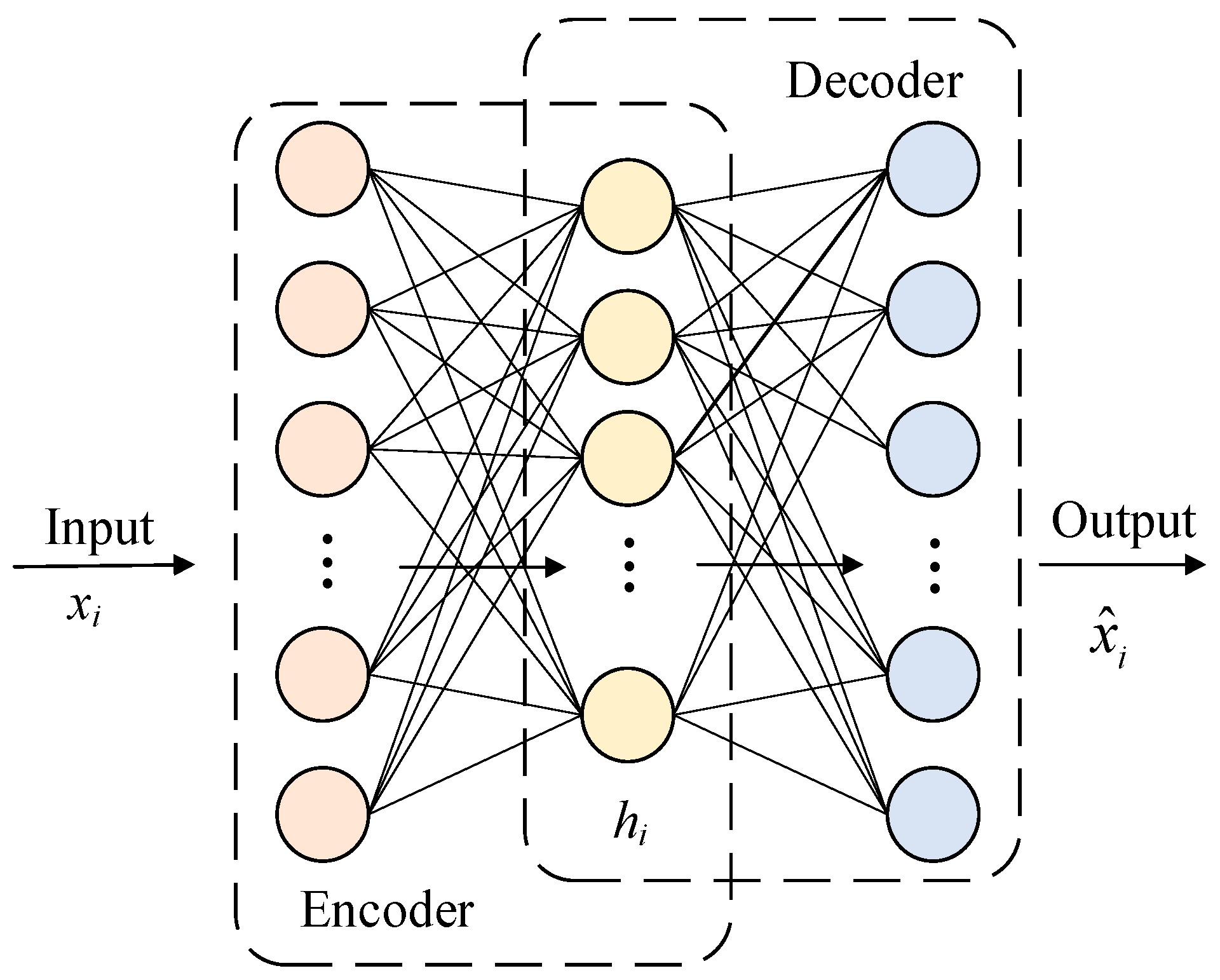
2.2. Autoencoder (AE)
2.3. Convolutional Neural Network (CNN)
2.4. Balanced Distribution Adaptation (BDA)
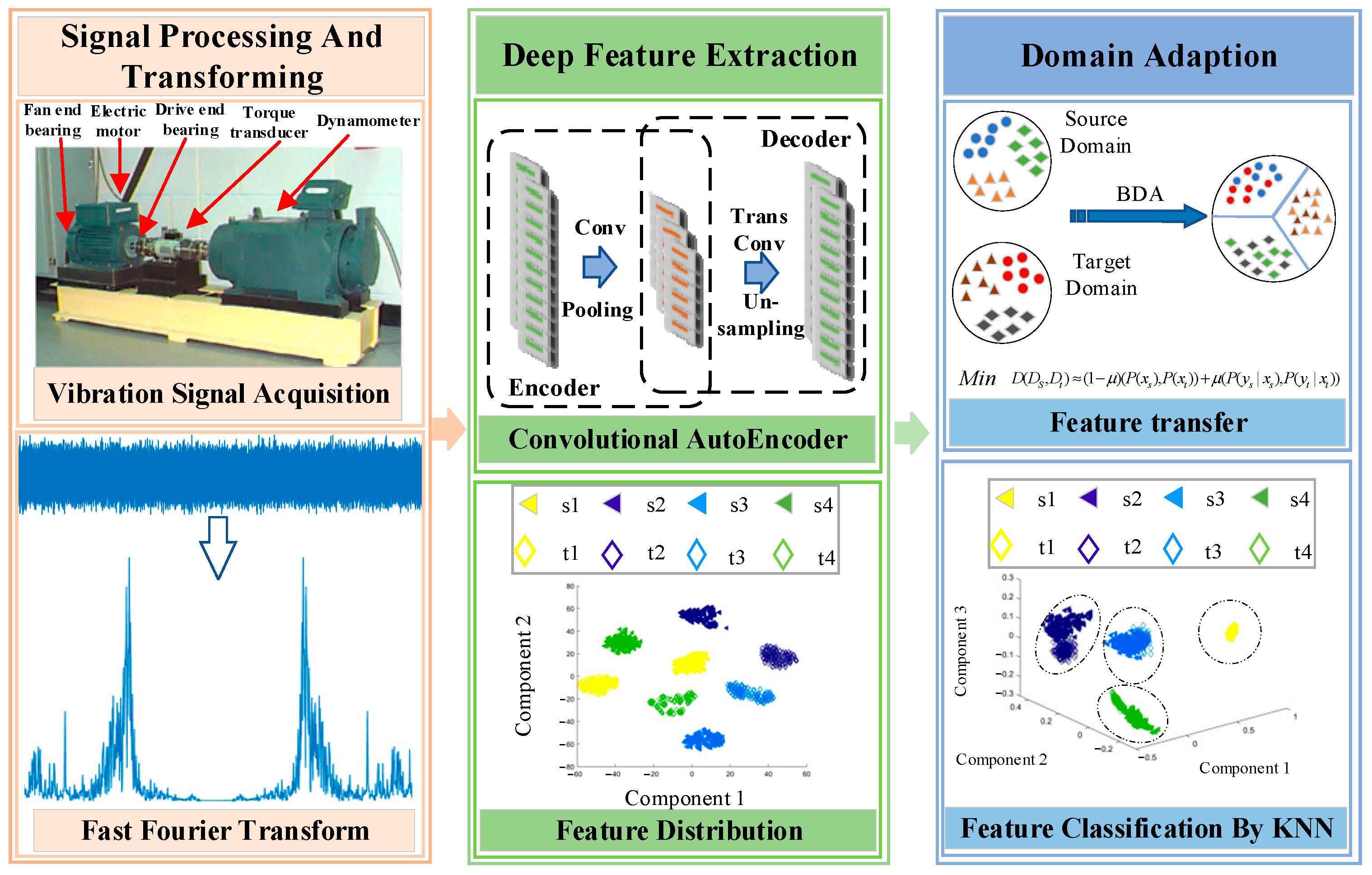
3. Proposed Architecture
4. Experiments and Analysis
4.1. Variable Load Dataset from the CWRU
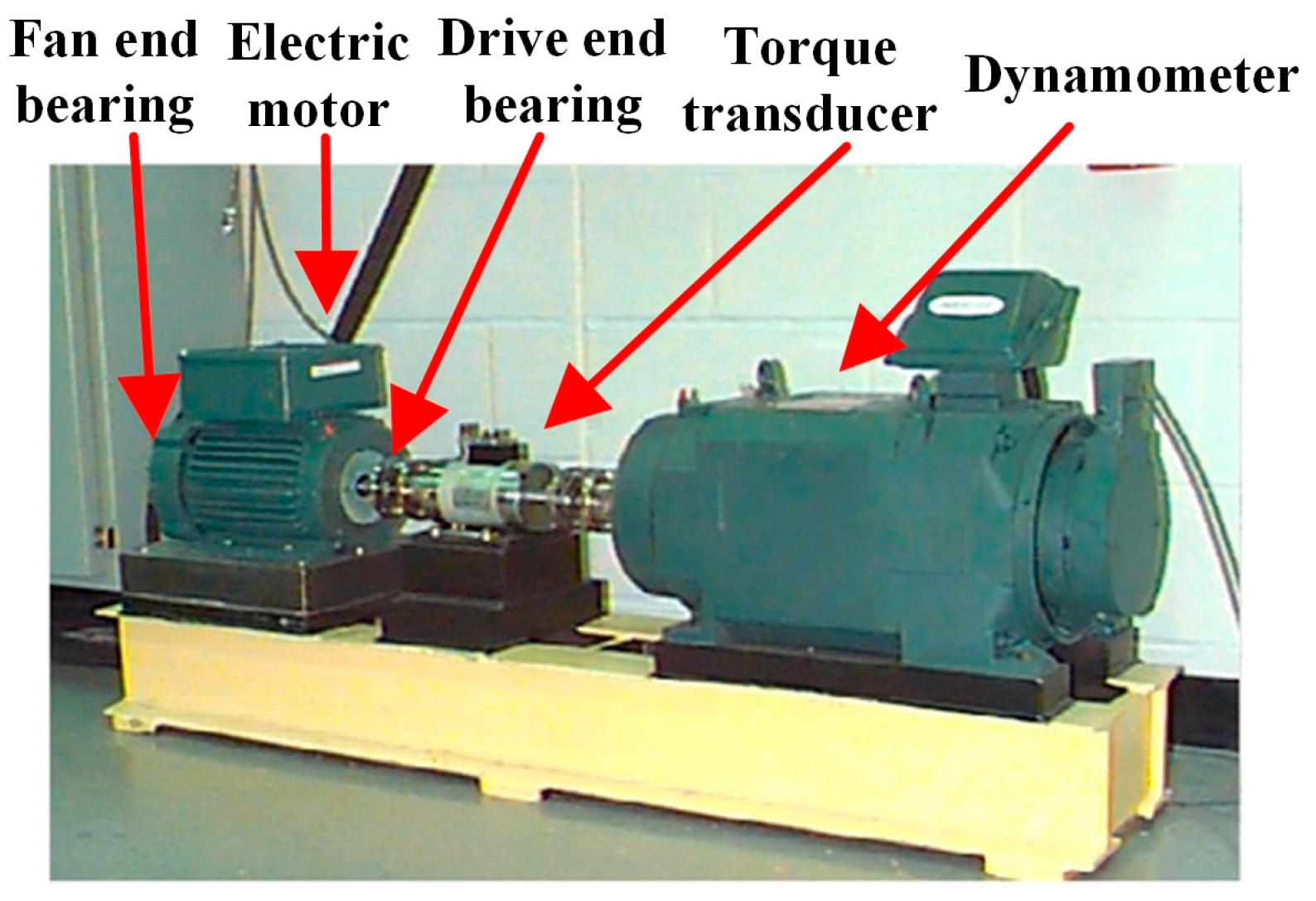
4.1.1. Data Description
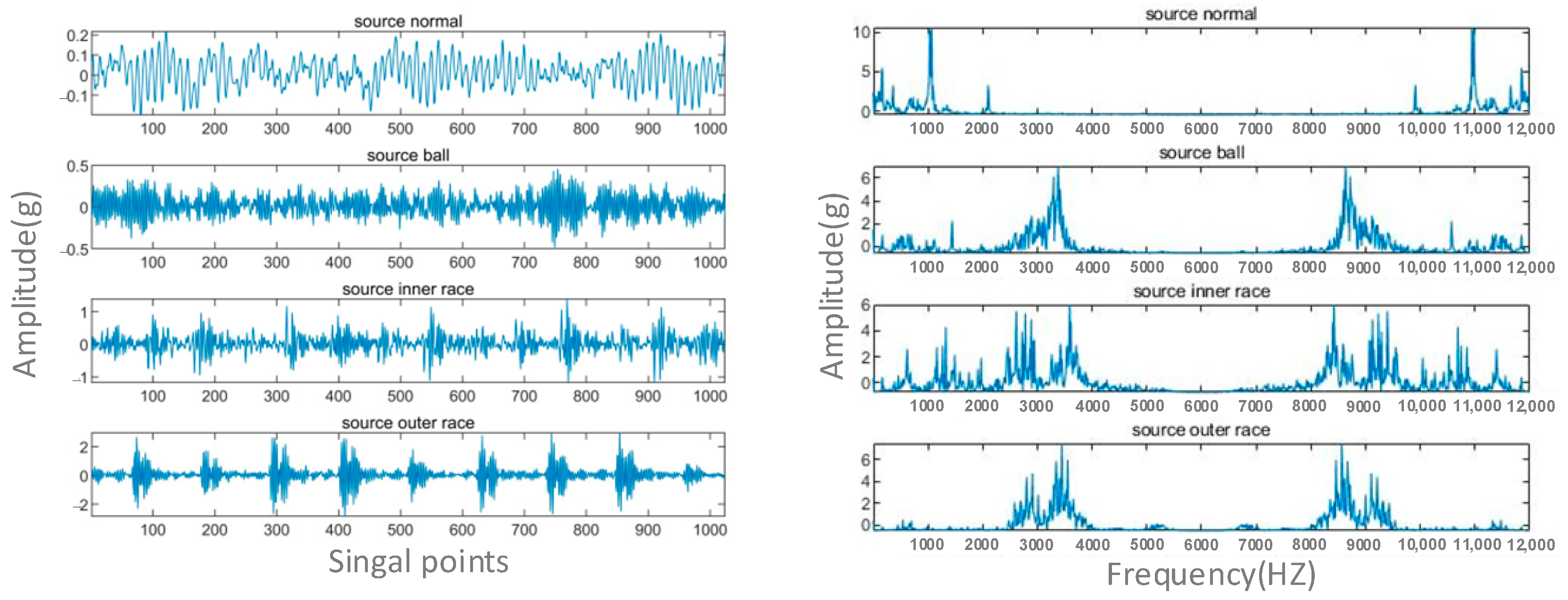
4.1.2. Signal Pre-Processing
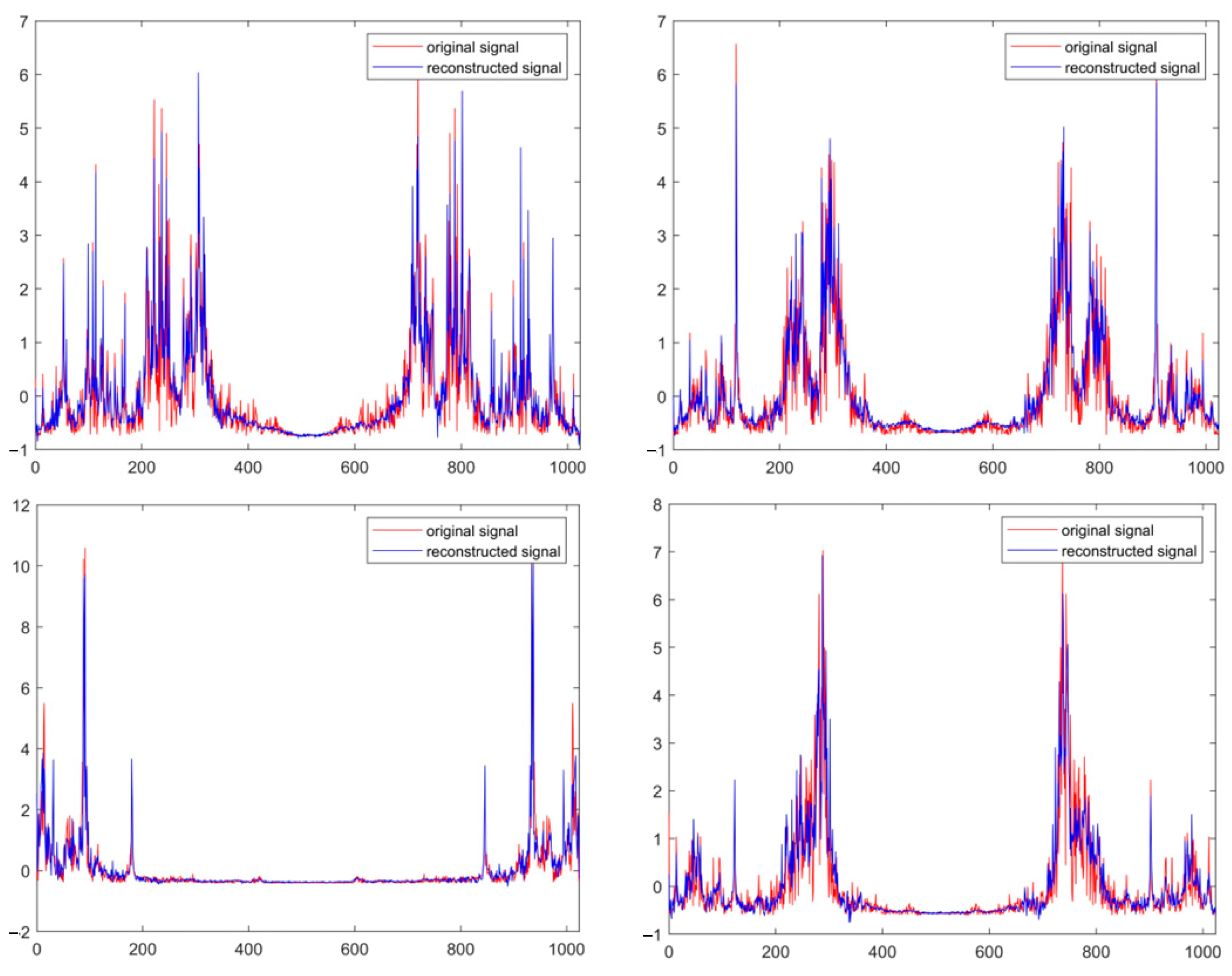
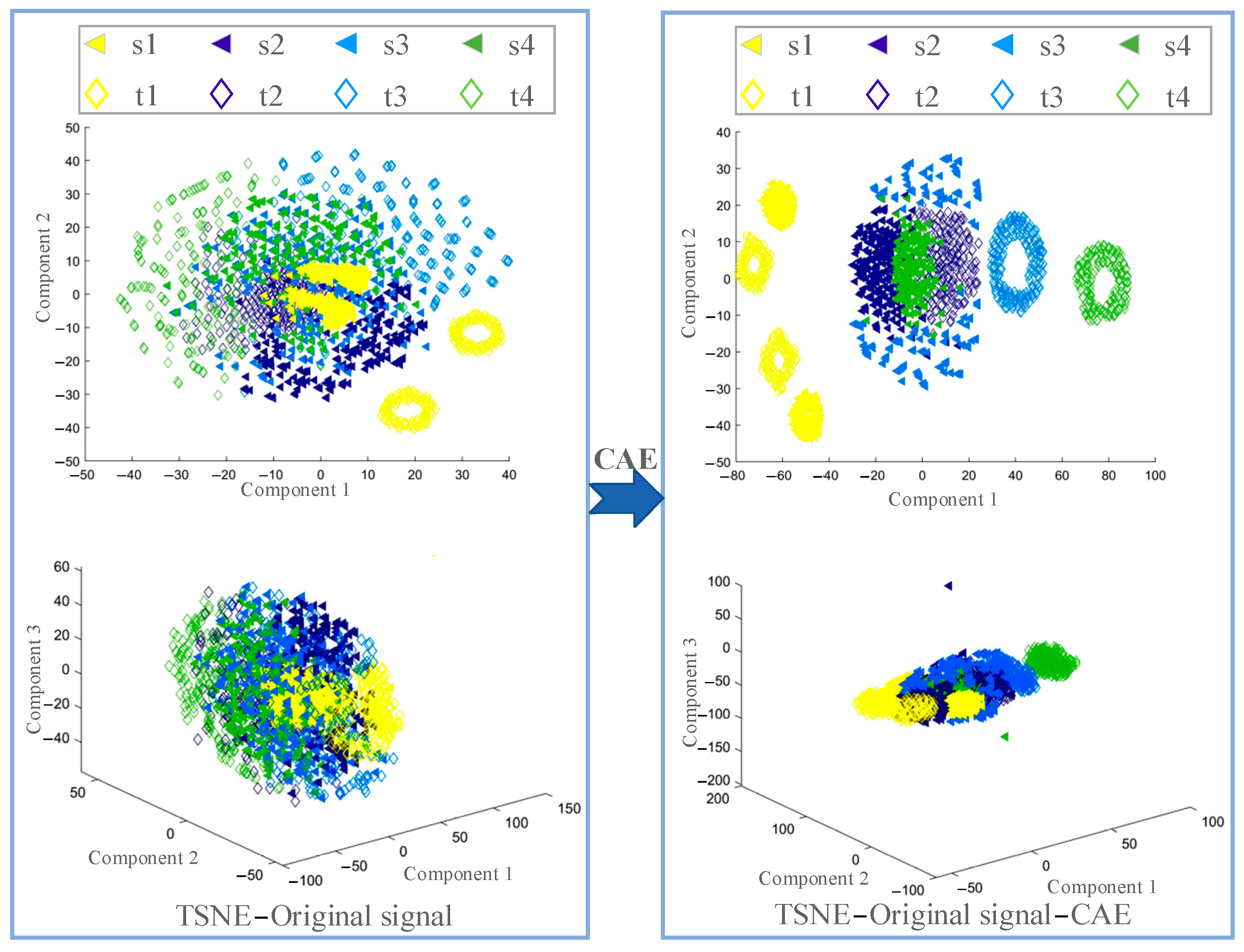
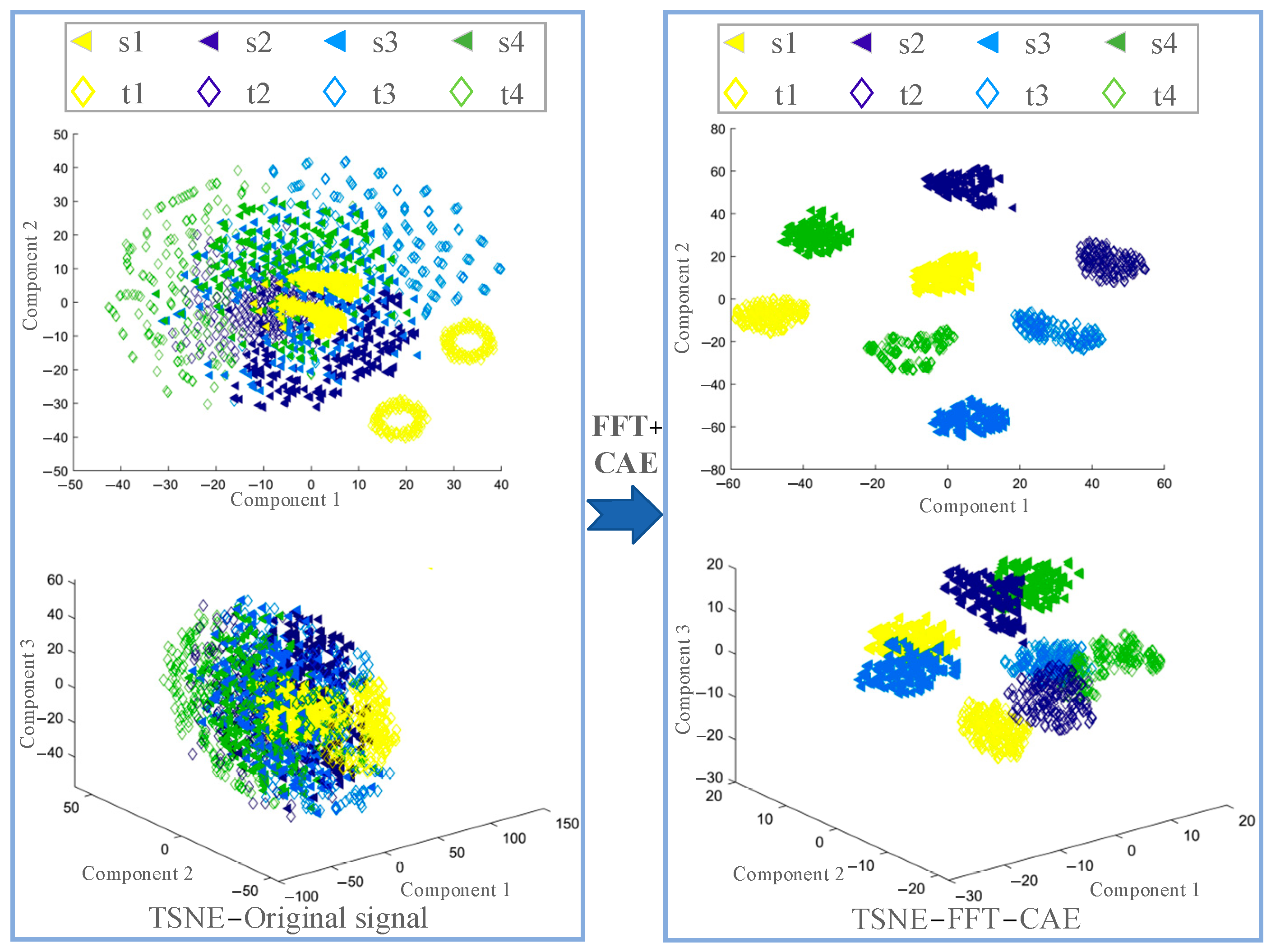
4.1.3. Signal Reconstruction and Feature Extraction
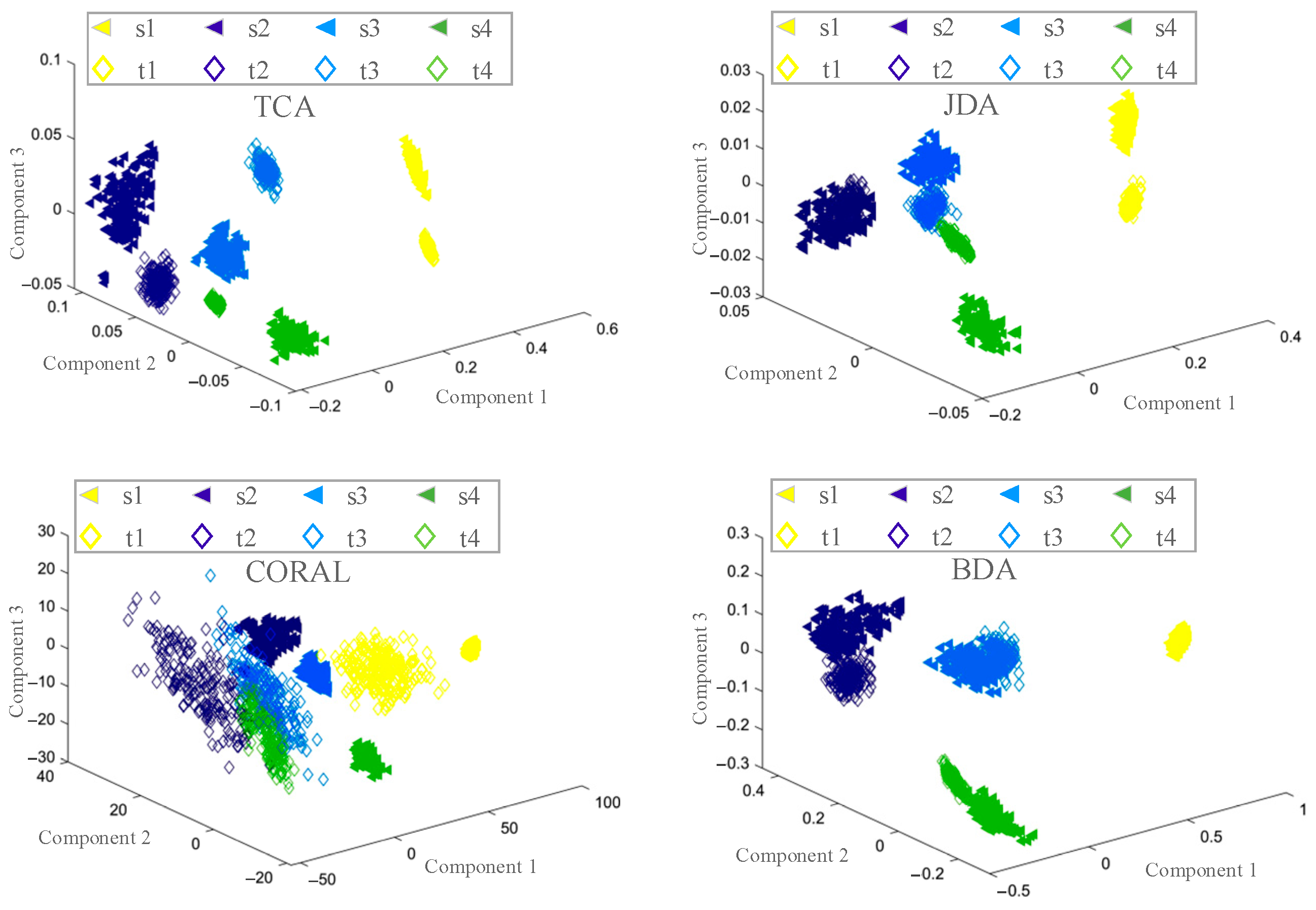
4.1.4. Feature Migration and Analysis
4.1.5. Fault Classification and Analysis
- (1)
- TCA-KNN
- (2)
- TCA-GBDT
- (3)
- CORAL-KNN
- (4)
- JDA-KNN
- (5)
- BDA-KNN
- (6)
- BDA-SVM
- (7)
- BDA-GBDT
- (8)
- DFCNN
- (9)
- DEEP FEATURE-KNN
- (10)
- CAE-DTLN
- (11)
- 1DRCAE
4.2. Southeastern University Gearbox Dataset
4.2.1. Data Description
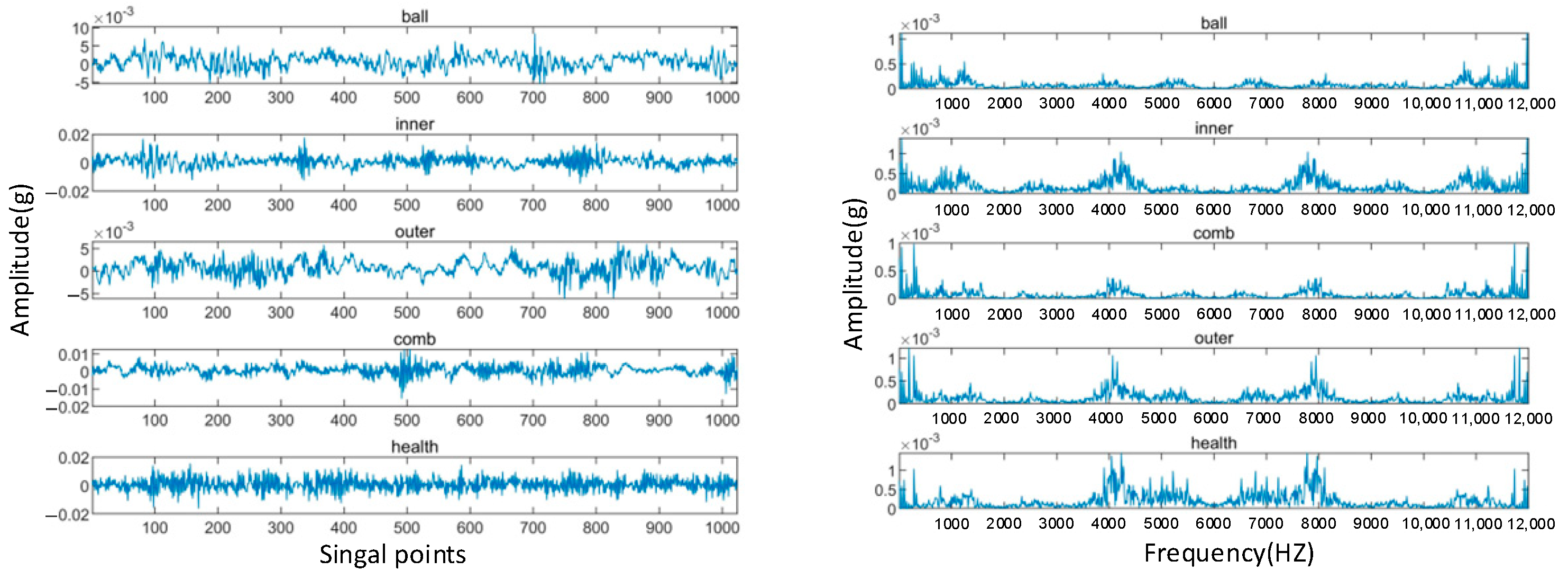
4.2.2. Signal Pre-Processing
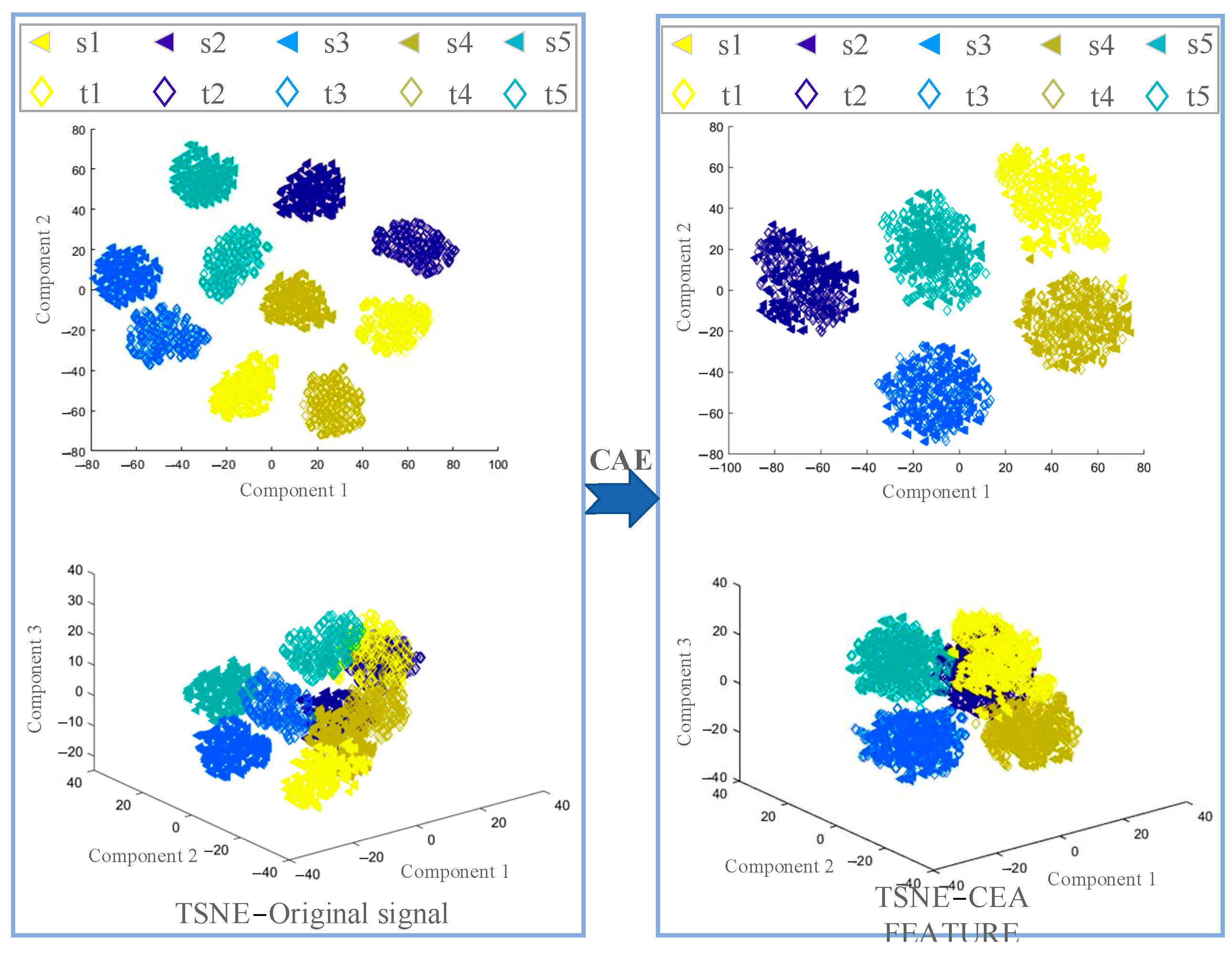
4.2.3. Signal Reconstruction and Feature Extraction
4.2.4. Feature Migration
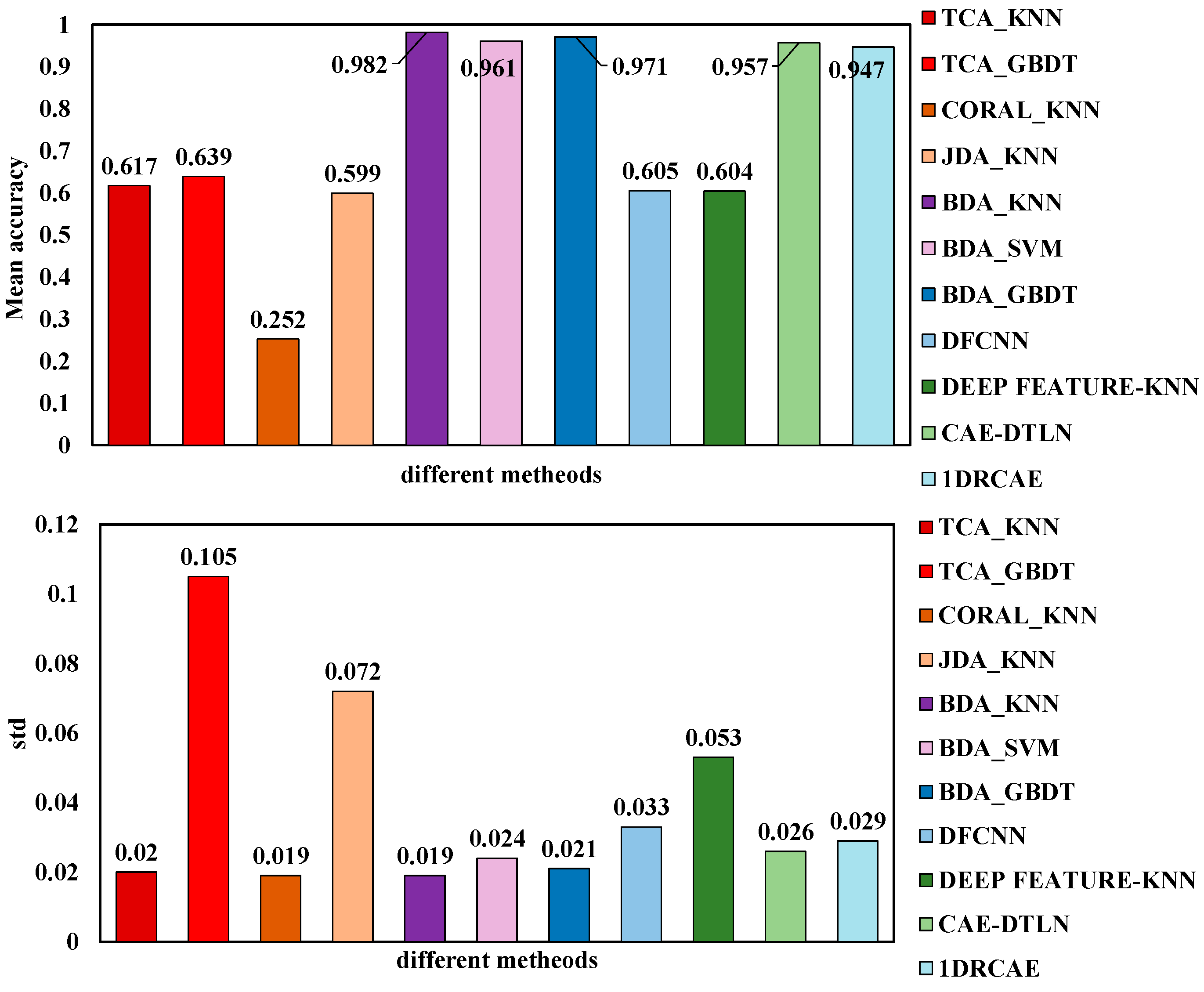
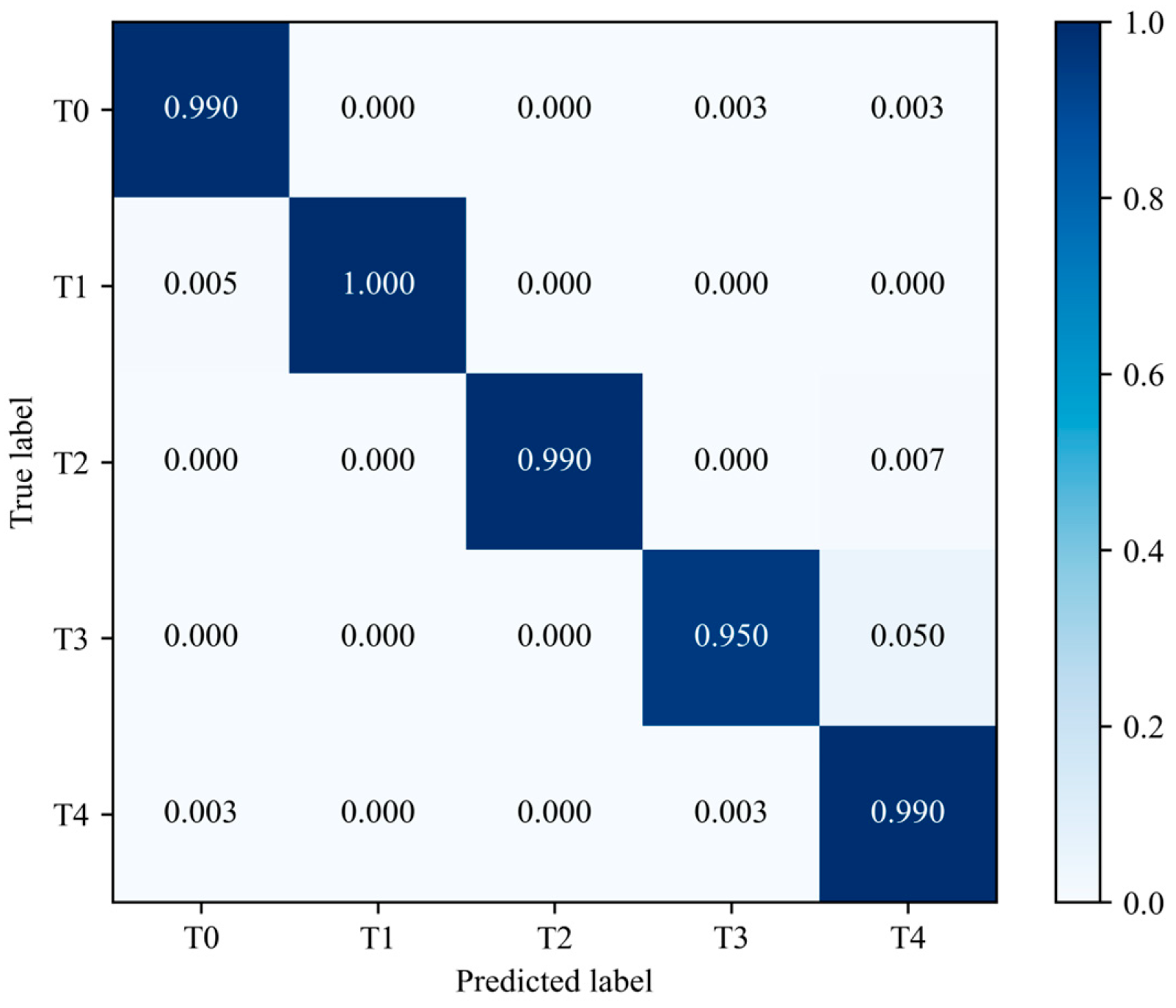
4.2.5. Fault Classification and Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| AE | autoencoder |
| BDA | balanced distribution adaption |
| CNN | convolutional neural network |
| DFT | discrete Fourier transform |
| FFT | fast Fourier transform |
| GAN | generative adversarial network |
| KNN | K-nearest neighbor |
| MMD | maximum mean discrepancy |
| T-SNE | T-distributed stochastic neighbor embedding |
| source domain space | |
| target domain space | |
| spectral function | |
| output of decoder | |
| reconstruction error | |
| marginal distribution | |
| conditional distribution | |
| balance factor | |
| regenerative kernel Hilbert space | |
| H | central matrix |
| I | unit matrix |
| A | transformation matrix |
| Lagrangian operator |
References
- Zhang, S.; Wang, B.; Habetler, T.G. Deep Learning Algorithms for Bearing Fault Diagnostics—A Comprehensive Review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Liu, Z.-H.; Meng, X.-D.; Wei, H.-L.; Chen, L.; Lu, B.-L.; Wang, Z.-H.; Chen, L. A Regularized LSTM Method for Predicting Remaining Useful Life of Rolling Bearings. Int. J. Autom. Comput. 2021, 18, 581–593. [Google Scholar] [CrossRef]
- Neupane, D.; Seok, J. Bearing Fault Detection and Diagnosis Using Case Western Reserve University Dataset with Deep Learning Approaches: A Review. IEEE Access 2020, 8, 93155–93178. [Google Scholar] [CrossRef]
- Rai, A.; Upadhyay, S. A review on signal processing techniques utilized in the fault diagnosis of rolling element bearings. Tribol. Int. 2016, 96, 289–306. [Google Scholar] [CrossRef]
- Benali, J.; Sayadi, M.; Fnaiech, F.; Morello, B.; Zerhouni, N. Importance of the fourth and fifth intrinsic mode functions for bearing fault diagnosis. In Proceedings of the 14th International Conference on Sciences and Techniques of Automatic Control & Computer Engineering—STA’2013, Sousse, Tunisia, 20–22 December 2013; pp. 259–264. [Google Scholar] [CrossRef]
- Peng, B.; Bi, Y.; Xue, B.; Zhang, M.; Wan, S. A Survey on Fault Diagnosis of Rolling Bearings. Algorithms 2022, 15, 347. [Google Scholar] [CrossRef]
- Xie, W.; Li, Z.; Xu, Y.; Gardoni, P.; Li, W. Evaluation of Different Bearing Fault Classifiers in Utilizing CNN Feature Extraction Ability. Sensors 2022, 22, 3314. [Google Scholar] [CrossRef]
- Cerrada, M.; Sánchez, R.-V.; Li, C.; Pacheco, F.; Cabrera, D.; de Oliveira, J.V.; Vásquez, R.E. A review on data-driven fault severity assessment in rolling bearings. Mech. Syst. Signal Process. 2018, 99, 169–196. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, J.; Alippi, C.; Ding, S.X.; Shardt, Y.; Peng, T.; Yang, C. Graph neural network-based fault diagnosis: A review. arXiv 2021, arXiv:2111.08185. [Google Scholar]
- Liu, Z.-H.; Jiang, L.-B.; Wei, H.-L.; Chen, L.; Li, X.-H. Optimal Transport Based Deep Domain Adaptation Approach for Fault Diagnosis of Rotating Machine. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Li, H.; Lian, X.; Guo, C.; Zhao, P. Investigation on early fault classification for rolling element bearing based on the optimal frequency band determination. J. Intell. Manuf. 2013, 26, 189–198. [Google Scholar] [CrossRef]
- Singh, D.S.; Zhao, Q. Pseudo-fault signal assisted EMD for fault detection and isolation in rotating machines. Mech. Syst. Signal Process. 2016, 81, 202–218. [Google Scholar] [CrossRef]
- Wang, J.; He, Q. Wavelet Packet Envelope Manifold for Fault Diagnosis of Rolling Element Bearings. IEEE Trans. Instrum. Meas. 2016, 65, 2515–2526. [Google Scholar] [CrossRef]
- Osman, S.; Wang, W. A Morphological Hilbert-Huang Transform Technique for Bearing Fault Detection. IEEE Trans. Instrum. Meas. 2016, 65, 2646–2656. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Wang, X.; Sui, G.; Xiang, J.; Wang, G.; Huo, Z.; Huang, Z. Multi-Domain Extreme Learning Machine for Bearing Failure Detection Based on Variational Modal Decomposition and Approximate Cyclic Correntropy. IEEE Access 2020, 8, 197711–197729. [Google Scholar] [CrossRef]
- Wang, F.; Dun, B.; Liu, X.; Xue, Y.; Li, H.; Han, Q. An Enhancement Deep Feature Extraction Method for Bearing Fault Diagnosis Based on Kernel Function and Autoencoder. Shock Vib. 2018, 2018, 6024874. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, B.; Chen, X. Intelligent fault diagnosis of roller bearings with multivariable ensemble-based incremental support vector machine. Knowl.-Based Syst. 2015, 89, 56–85. [Google Scholar] [CrossRef]
- Huo, Z.; Martinez-Garcia, M.; Zhang, Y.; Yan, R.; Shu, L. Entropy Measures in Machine Fault Diagnosis: Insights and Applications. IEEE Trans. Instrum. Meas. 2020, 69, 2607–2620. [Google Scholar] [CrossRef]
- Li, C.; Zheng, J.; Pan, H.; Tong, J.; Zhang, Y. Refined Composite Multivariate Multiscale Dispersion Entropy and Its Application to Fault Diagnosis of Rolling Bearing. IEEE Access 2019, 7, 47663–47673. [Google Scholar] [CrossRef]
- Jiao, W.; Li, G.; Jiang, Y.; Baim, R.; Tang, C.; Yan, T.; Ding, X.; Yan, Y. Multi-Scale Sample Entropy-Based Energy Moment Features Applied to Fault Classification. IEEE Access 2021, 9, 8444–8454. [Google Scholar] [CrossRef]
- Mushtaq, S.; Islam, M.M.M.; Sohaib, M. Deep Learning Aided Data-Driven Fault Diagnosis of Rotatory Machine: A Comprehensive Review. Energies 2021, 14, 5150. [Google Scholar] [CrossRef]
- Malhi, A.; Gao, R. PCA-Based Feature Selection Scheme for Machine Defect Classification. IEEE Trans. Instrum. Meas. 2004, 53, 1517–1525. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, D.; Cheng, J. A fault diagnosis approach for roller bearing based on IMF envelope spectrum and SVM. Measurement 2007, 40, 943–950. [Google Scholar] [CrossRef]
- Shen, F.; Chen, C.; Yan, R.; Gao, R.X. Bearing fault diagnosis based on SVD feature extraction and transfer learning classification. In Proceedings of the 2015 Prognostics and System Health Management Conference (PHM), Beijing, China, 21–23 October 2015. [Google Scholar]
- Zhang, N.; Wu, L.; Yang, J.; Guan, Y. Naive Bayes Bearing Fault Diagnosis Based on Enhanced Independence of Data. Sensors 2018, 18, 463. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Lin, J.; Zhou, X.; Lu, N. Deep neural networks: A promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data. Mech. Syst. Signal Process. 2016, 72–73, 303–315. [Google Scholar] [CrossRef]
- Xia, M.; Li, T.; Xu, L.; Liu, L.; de Silva, C.W. Fault Diagnosis for Rotating Machinery Using Multiple Sensors and Convolutional Neural Networks. IEEE/ASME Trans. Mechatron. 2017, 23, 101–110. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Wang, F.; Wang, Y. Rolling bearing fault diagnosis using adaptive deep belief network with dual-tree complex wavelet packet. ISA Trans. 2017, 69, 187–201. [Google Scholar] [CrossRef]
- Sun, W.; Shao, S.; Zhao, R.; Yan, R.; Zhang, X.; Chen, X. A sparse auto-encoder-based deep neural network approach for induction motor faults classification. Measurement 2016, 89, 171–178. [Google Scholar] [CrossRef]
- Kerboua, A.; Kelaiaia, R. Fault Diagnosis in an Asynchronous Motor Using Three-Dimensional Convolutional Neural Network. Arab. J. Sci. Eng. 2023, 1–19. [Google Scholar] [CrossRef]
- Liang, B.; Feng, W. Bearing Fault Diagnosis Based on ICEEMDAN Deep Learning Network. Processes 2023, 11, 2440. [Google Scholar] [CrossRef]
- Ma, P.; Zhang, H.; Fan, W.; Wang, C. A diagnosis framework based on domain adaptation for bearing fault diagnosis across diverse domains. ISA Trans. 2019, 99, 465–478. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, W.; Ding, Q.; Sun, J.-Q. Multi-Layer domain adaptation method for rolling bearing fault diagnosis. Signal Process. 2018, 157, 180–197. [Google Scholar] [CrossRef]
- Xu, W.; Wan, Y.; Zuo, T.-Y.; Sha, X.-M. Transfer Learning Based Data Feature Transfer for Fault Diagnosis. IEEE Access 2020, 8, 76120–76129. [Google Scholar] [CrossRef]
- Lu, W.; Liang, B.; Cheng, Y.; Meng, D.; Yang, J.; Zhang, T. Deep Model Based Domain Adaptation for Fault Diagnosis. IEEE Trans. Ind. Electron. 2016, 64, 2296–2305. [Google Scholar] [CrossRef]
- Li, M.; Sun, Z.-H.; He, W.; Qiu, S.; Liu, B. Rolling Bearing Fault Diagnosis under Variable Working Conditions Based on Joint Distribution Adaptation and SVM. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, J.; Chen, Y.; Hao, S.; Feng, W.; Shen, Z. Balanced Distribution Adaptation for Transfer Learning. In Proceedings of the 2017 IEEE International Conference on Data Mining (ICDM), New Orleans, LA, USA, 18–21 November 2017. [Google Scholar]
- Welaratna, S. Thirty Years of FFT Analyzers; Sound and Vibration: San Jose, CA, USA, 1997. [Google Scholar]
- Hakim, M.; Omran, A.A.B.; Inayat-Hussain, J.I.; Ahmed, A.N.; Abdellatef, H.; Abdellatif, A.; Gheni, H.M. Bearing Fault Diagnosis Using Lightweight and Robust One-Dimensional Convolution Neural Network in the Frequency Domain. Sensors 2022, 22, 5793. [Google Scholar] [CrossRef]
- Zhang, M.; Yin, J.; Chen, W. Rolling Bearing Fault Diagnosis Based on Time-Frequency Feature Extraction and IBA-SVM. IEEE Access 2022, 10, 85641–85654. [Google Scholar] [CrossRef]
- Mao, W.; Liu, Y.; Ding, L.; Li, Y. Imbalanced Fault Diagnosis of Rolling Bearing Based on Generative Adversarial Network: A Comparative Study. IEEE Access 2019, 7, 9515–9530. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the Dimensionality of Data with Neural Networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Mao, W.; Chen, J.; Liang, X.; Zhang, X. A New Online Detection Approach for Rolling Bearing Incipient Fault via Self-Adaptive Deep Feature Matching. IEEE Trans. Instrum. Meas. 2019, 69, 443–456. [Google Scholar] [CrossRef]
- An, J.; Ai, P.; Liu, C.; Xu, S.; Liu, D. Deep Clustering Bearing Fault Diagnosis Method Based on Local Manifold Learning of an Autoencoded Em-bedding. IEEE Access 2021, 9, 30154–30168. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Mao, W.; Liu, Y.; Ding, L.; Safian, A.; Liang, X. A New Structured Domain Adversarial Neural Network for Transfer Fault Diagnosis of Rolling Bearings Under Different Working Conditions. IEEE Trans. Instrum. Meas. 2020, 70, 1–13. [Google Scholar] [CrossRef]
- Liu, Z.-H.; Lu, B.-L.; Wei, H.-L.; Li, X.-H.; Chen, L. Fault Diagnosis for Electromechanical Drivetrains Using a Joint Distribution Optimal Deep Domain Adaptation Approach. IEEE Sens. J. 2019, 19, 12261–12270. [Google Scholar] [CrossRef]
- Qian, Q.; Qin, Y.; Wang, Y.; Liu, F. A new deep transfer learning network based on convolutional auto-encoder for mechanical fault diagnosis. Measurement 2021, 178, 109352. [Google Scholar] [CrossRef]
- Yu, J.; Zhou, X. One-Dimensional Residual Convolutional Autoencoder Based Feature Learning for Gearbox Fault Diagnosis. IEEE Trans. Ind. Inform. 2020, 16, 6347–6358. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Type | Kernel Size/Stride | Output |
|---|---|---|---|
| Input | Data | / | 1 × 1024 |
| Conv1 | Convolution1d | 32/16 | 128 × 16 |
| Pool | MaxPool | 2/2 | 64 × 16 |
| Conv2 | Convolution1d | 3/1 | 64 × 32 |
| Pool | MaxPool | 2/2 | 32 × 32 |
| Conv3 | Convolution1d | 3/1 | 32 × 64 |
| Pool | MaxPool | 2/2 | 16 × 64 |
| Conv4 | Convolution1d | 3/1 | 16 × 64 |
| Pool | MaxPool | 2/2 | 8 × 64 |
| Conv5 | Convolution1d | 3/1 | 6 × 64 |
| Pool | MaxPool | 2/2 | 3 × 64 |
| Upsample | MaxUnpool | 2/2 | 6 × 64 |
| Deconv1 | ConvTranspose1d | 3/1 | 8 × 64 |
| Upsample | MaxUnpool | 2/2 | 16 × 64 |
| Deconv2 | ConvTranspose1d | 3/1 | 16 × 64 |
| Upsample | MaxUnpool | 2/2 | 32 × 64 |
| Deconv3 | ConvTranspose1d | 3/1 | 32 × 32 |
| Upsample | MaxUnpool | 2/2 | 64 × 32 |
| Deconv4 | ConvTranspose1d | 3/1 | 64 × 16 |
| Deconv5 | ConvTranspose1d | 3/1 | 1 × 1024 |
| Class | Fault | Damage Diameter (inch) | Load (HP) |
|---|---|---|---|
| Source1 | Normal | 0.007 | 1 |
| Source2 | Ball | 0.007 | 1 |
| Source3 | Inner | 0.007 | 1 |
| Source4 | Outer | 0.007 | 1 |
| Target1 | Normal | 0.014 | 3 |
| Target2 | Ball | 0.014 | 3 |
| Target3 | Inner | 0.014 | 3 |
| Target4 | Outer | 0.014 | 3 |
| Evaluating Indicator | TCA_KNN | TCA_GBDT | CORAL_KNN | JDA_KNN | BDA_KNN | BDA_SVM | BDA_GBDT | DFCNN | DEEP FEATURE-KNN | CAE-DTLN | 1DRCAE |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean accuracy | 0.776 | 0.431 | 0.256 | 0.820 | 0.985 | 0.974 | 0.536 | 0.674 | 0.704 | 0.963 | 0.954 |
| std | 0.017 | 0.116 | 0.013 | 0.058 | 0.014 | 0.018 | 0.088 | 0.036 | 0.043 | 0.021 | 0.024 |
| Class | Fault | Condition |
|---|---|---|
| Source1 | Normal | 20 HZ-0 V |
| Source2 | Ball | 20 HZ-0 V |
| Source3 | Inner | 20 HZ-0 V |
| Source4 | Outer | 20 HZ-0 V |
| Source5 | Combination | 20 HZ-0 V |
| Target1 | Normal | 30 HZ-2 V |
| Target2 | Ball | 30 HZ-2 V |
| Target3 | Inner | 30 HZ-2 V |
| Target4 | Outer | 30 HZ-2 V |
| Target5 | Combination | 30 HZ-2 V |
| Evaluating Indicator | TCA_KNN | TCA_GBDT | CORAL_KNN | JDA_KNN | BDA_KNN | BDA_SVM | BDA_GBDT | DFCNN | DEEP FEATURE-KNN | CAE-DTLN | 1DRCAE |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean accuracy | 0.617 | 0.639 | 0.252 | 0.599 | 0.982 | 0.961 | 0.971 | 0.605 | 0.604 | 0.957 | 0.947 |
| std | 0.020 | 0.105 | 0.019 | 0.072 | 0.019 | 0.024 | 0.021 | 0.033 | 0.053 | 0.026 | 0.029 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, Z.; Liu, H.; Mao, W.; Xie, X.; Cui, Y. Rolling Bearing Fault Diagnosis across Operating Conditions Based on Unsupervised Domain Adaptation. Lubricants 2023, 11, 383. https://doi.org/10.3390/lubricants11090383
Zhong Z, Liu H, Mao W, Xie X, Cui Y. Rolling Bearing Fault Diagnosis across Operating Conditions Based on Unsupervised Domain Adaptation. Lubricants. 2023; 11(9):383. https://doi.org/10.3390/lubricants11090383
Chicago/Turabian StyleZhong, Zhidan, Hao Liu, Wentao Mao, Xinghui Xie, and Yunhao Cui. 2023. "Rolling Bearing Fault Diagnosis across Operating Conditions Based on Unsupervised Domain Adaptation" Lubricants 11, no. 9: 383. https://doi.org/10.3390/lubricants11090383
APA StyleZhong, Z., Liu, H., Mao, W., Xie, X., & Cui, Y. (2023). Rolling Bearing Fault Diagnosis across Operating Conditions Based on Unsupervised Domain Adaptation. Lubricants, 11(9), 383. https://doi.org/10.3390/lubricants11090383