Research on Loaded Contact Analysis and Tooth Wear Calculation Method of Cycloid–Pin Gear Reducer

Abstract
:1. Introduction
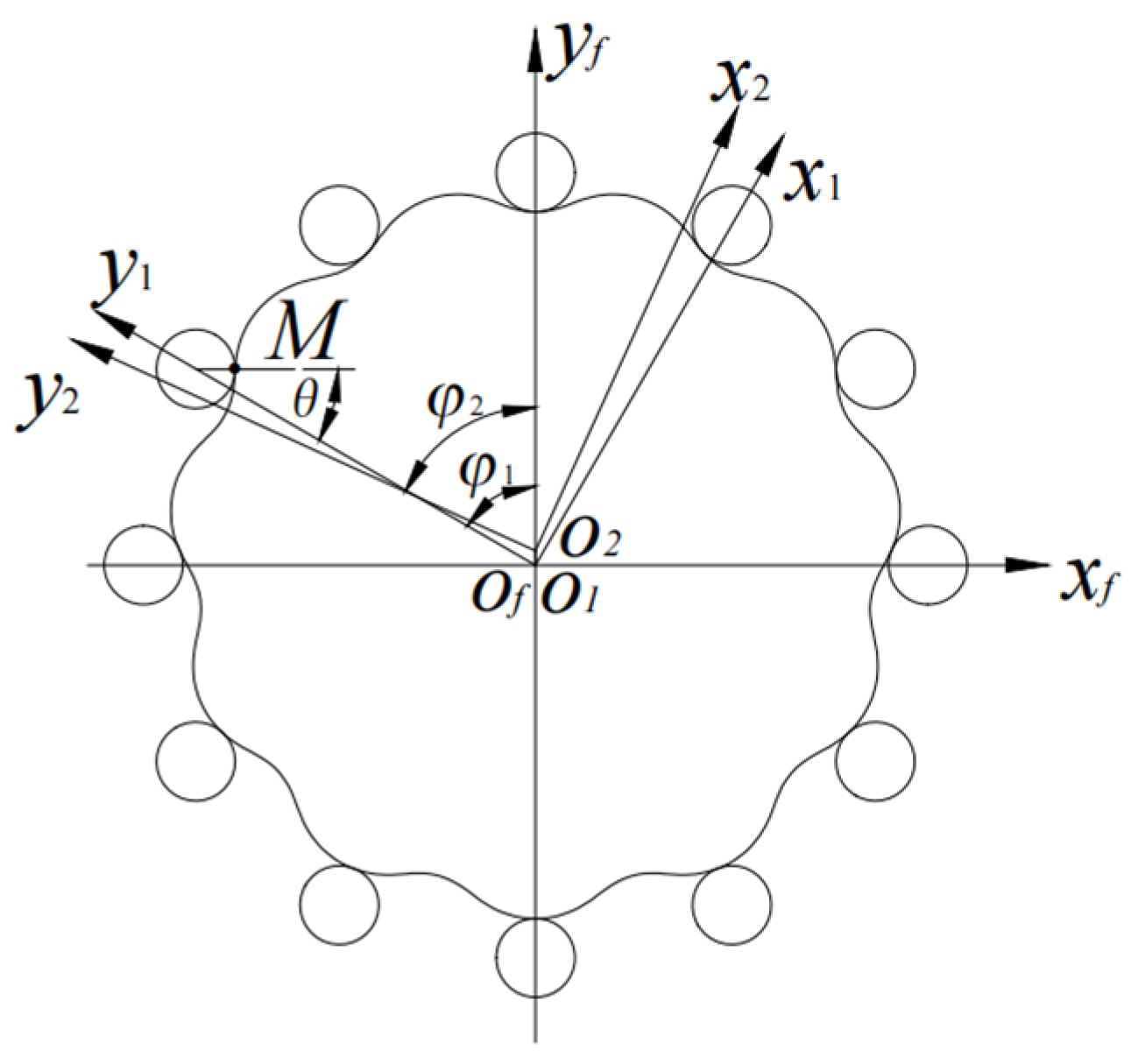
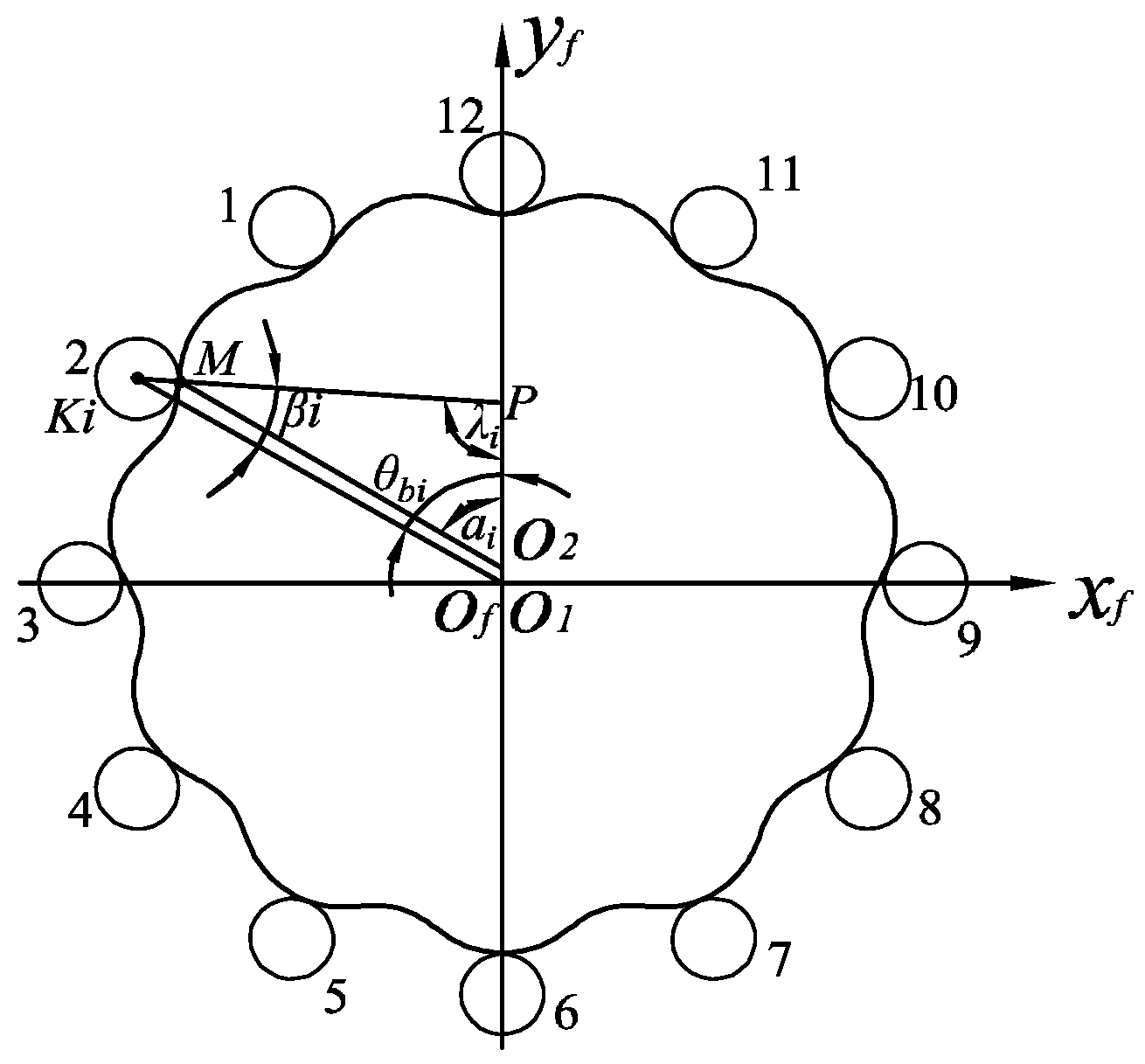
2. Construction of Cycloid Gear Tooth Profile Equation
3. Tooth Contact Analysis (TCA)
3.1. Unloaded TCA on Cycloid–Pin Gear
3.2. Loaded Contact Analysis (LTCA) of Cycloid–Pin Gear
3.2.1. Hertz Contact Analysis
3.2.2. Static Balance and Deformation Compatibility Conditions
3.2.3. Determination of Contact Load and Meshing Tooth Logarithm by Clearance Method
3.3. Determination of Motion Parameters
4. Adhesive Wear Calculation Model
4.1. Archard Adhesive Wear Calculation Model
4.2. Dynamic Wear Coefficient k0
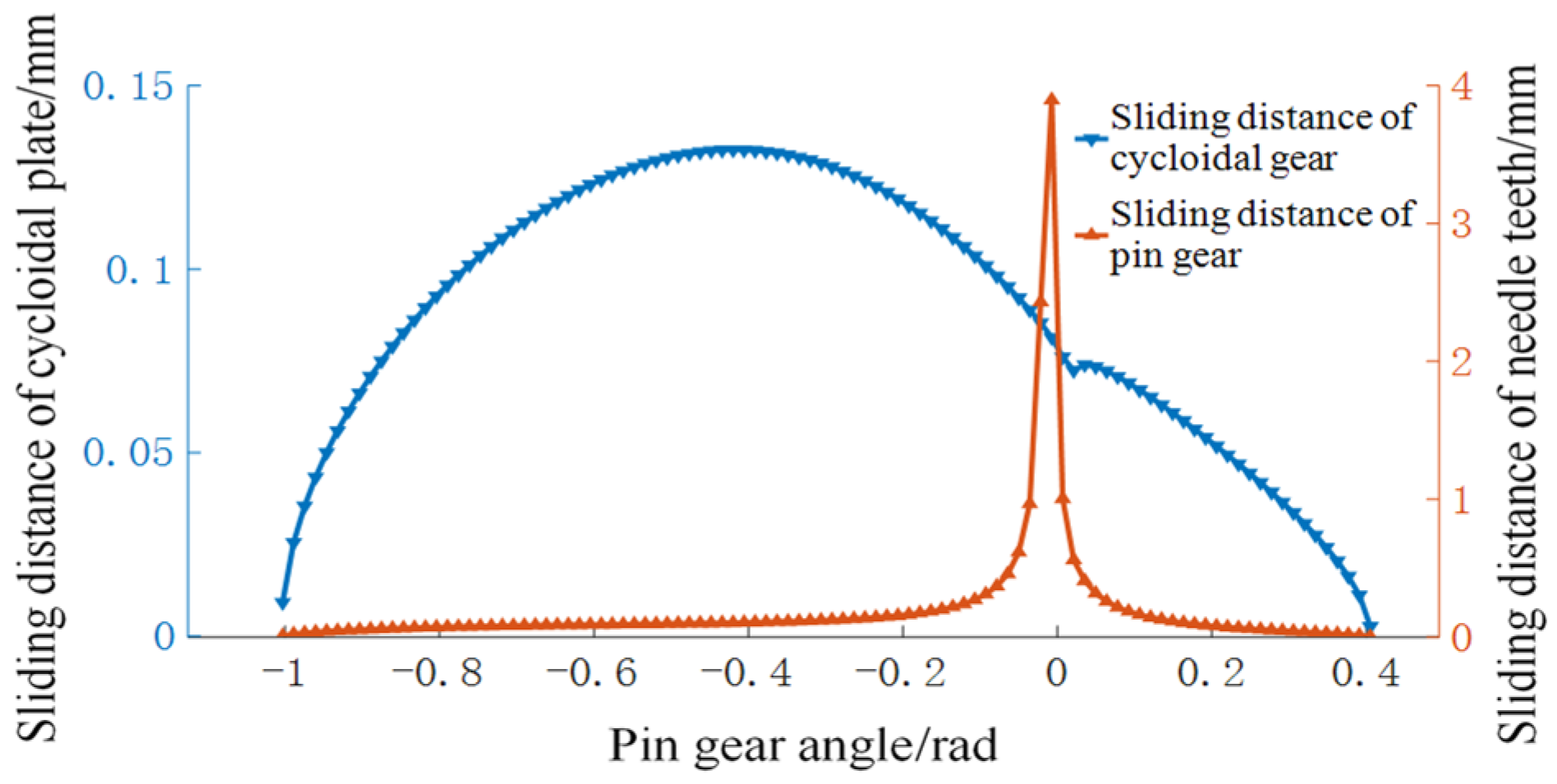
4.3. Slip Distance
4.4. Calculation of Tooth Surface Wear
5. Simulation Results and Analysis
5.1. Calculation Results of TCA
5.2. Dynamic Wear Coefficient
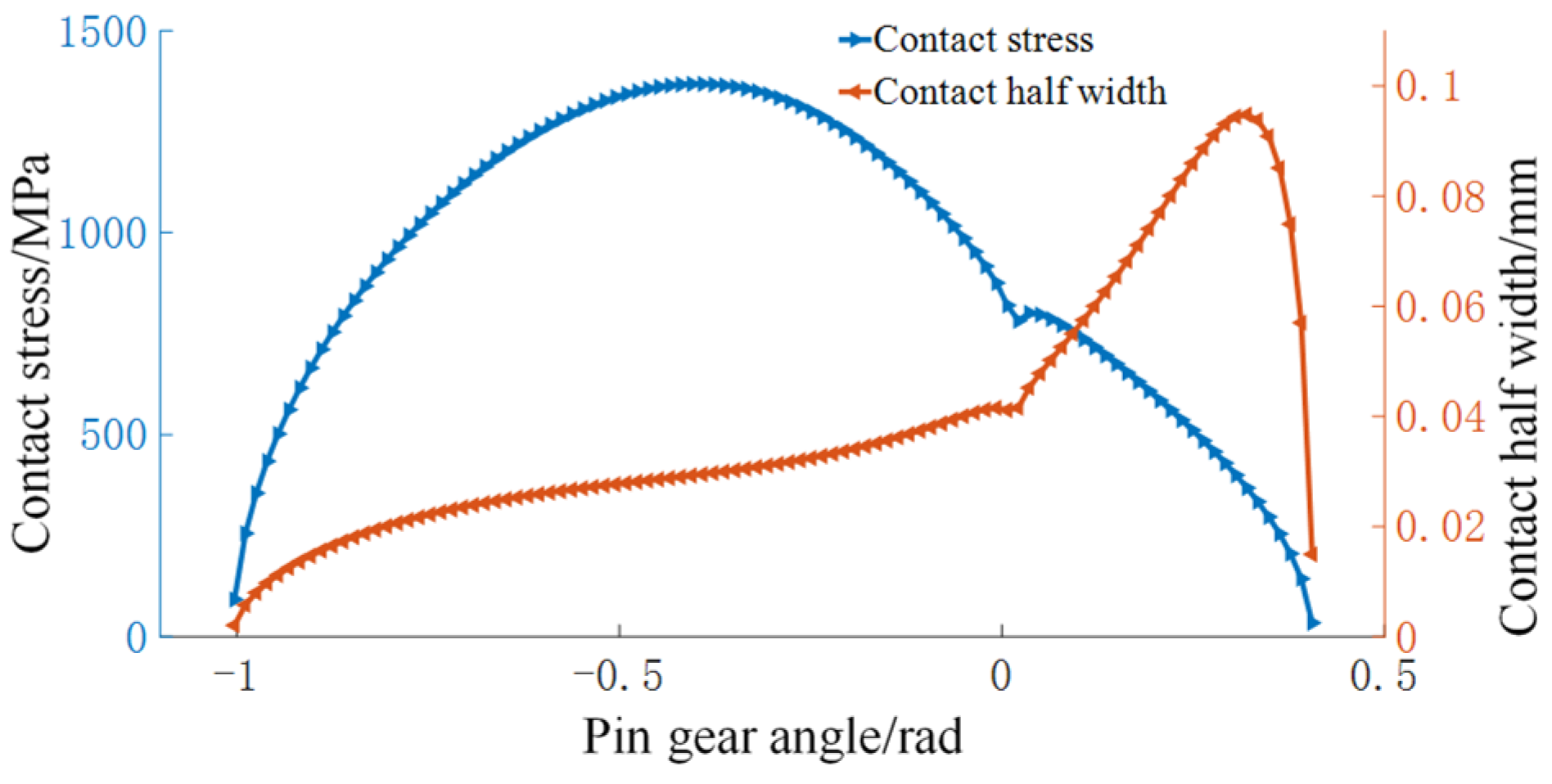
5.3. Hertz Contact Stress and Contact Half-Width
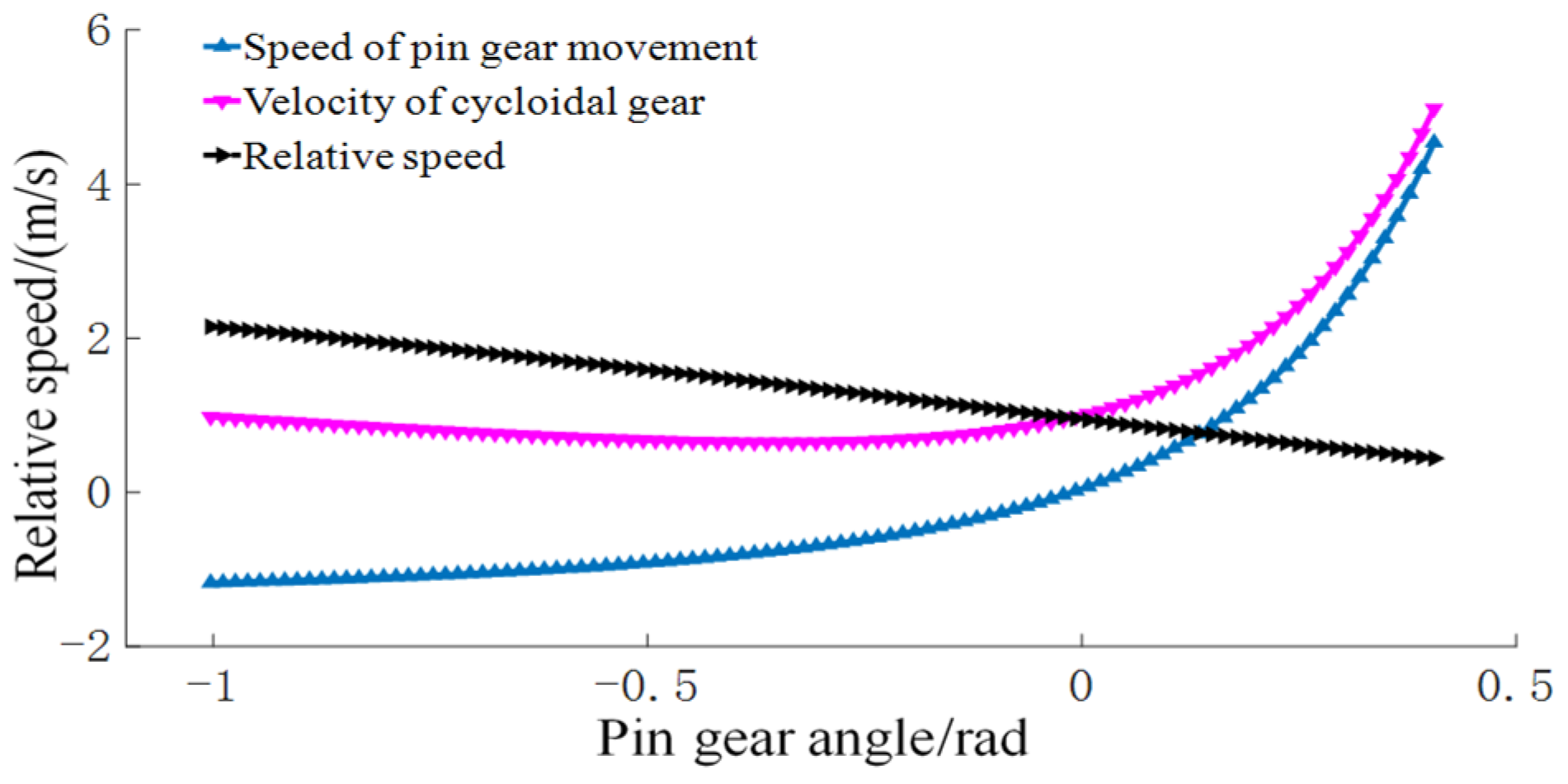
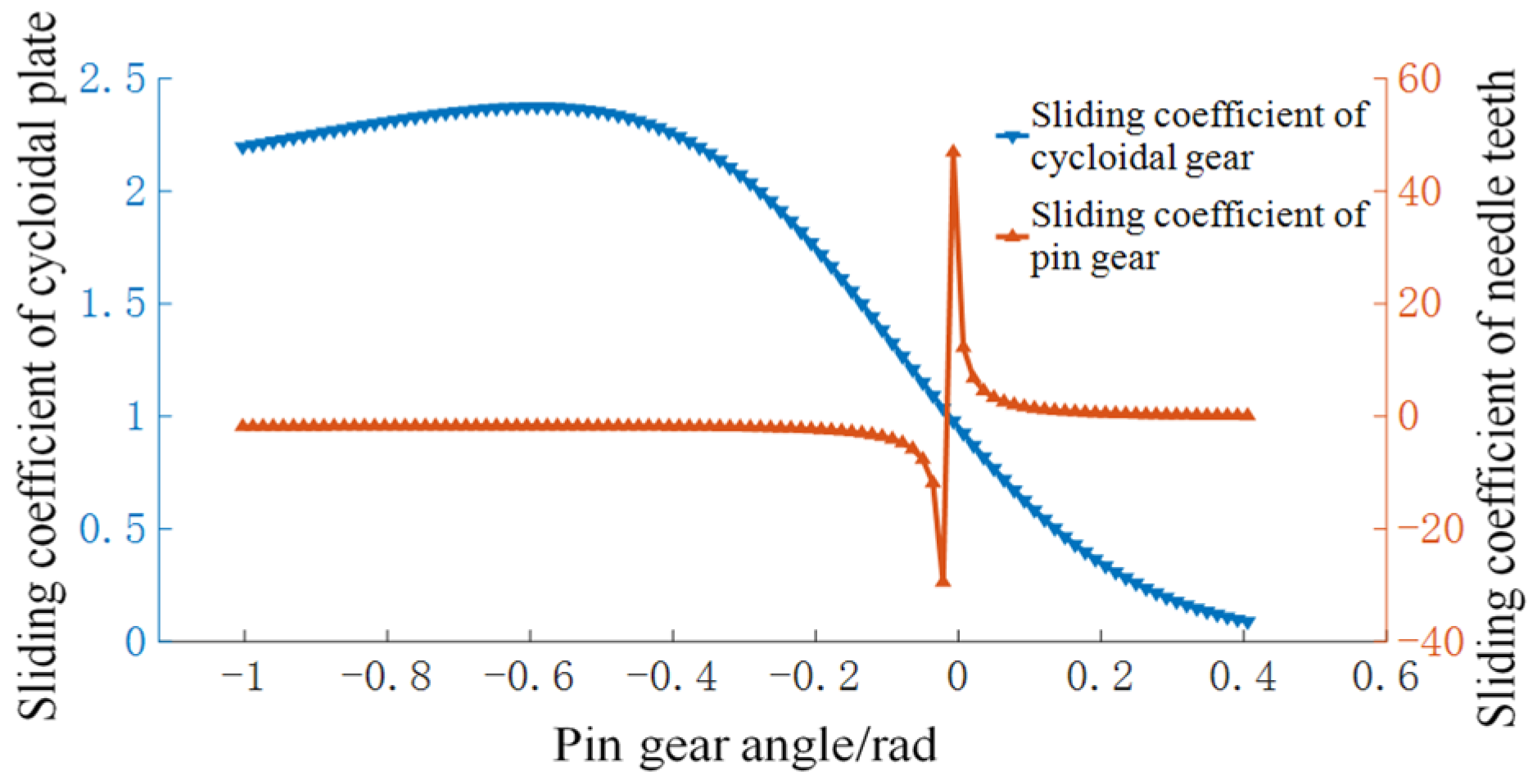
5.4. Slip Ratio and Slip Distance
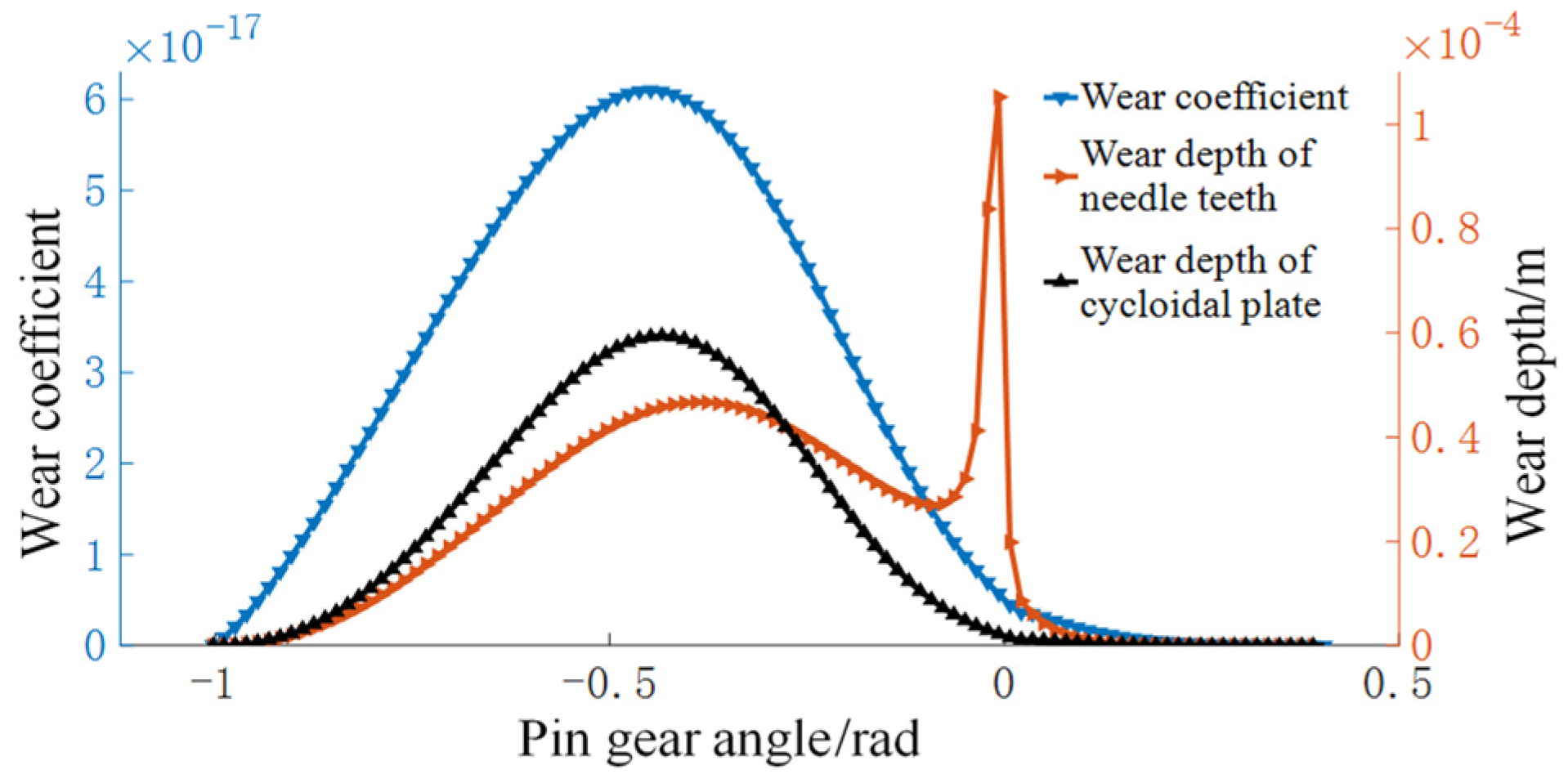
5.5. Wear Depth
6. Conclusions
- (1)
- The load-bearing contact analysis of the tooth surface determines the coincidence degree of cycloidal pin gear meshing transmission and then determines the meshing interval of a single cycloid tooth, which lays the foundation for the wear analysis of the load-bearing tooth surface.
- (2)
- Through the motion analysis of cycloidal pin gear drive, the distribution of the sliding coefficient of two tooth surfaces is determined. Because the speed vector is positive and negative during the meshing process of the gear teeth, the slip coefficient suddenly increases at the speed zero point.
- (3)
- In the whole meshing area, the wear of pin teeth is relatively large at the speed zero point, and the wear in other meshing areas is relatively uniform. The wear of cycloidal gear teeth depends on the contact stress distribution of the tooth surface.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, L.X.; Yang, Y.H. Dynamic modeling and contact analysis of a cycloid-pin gear mechanism with a turning arm cylindrical roller bearing. Mech. Mach. Theory 2016, 104, 327–349. [Google Scholar]
- Xu, L.X. A dynamic model to predict the number of pins to transmit load in a cycloidal reducer with assembling clearance. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 4247–4269. [Google Scholar] [CrossRef]
- Xu, L.X.; Chen, B.K.; Li, C.Y. Dynamic modelling and contact analysis of bearing-cycloid-pinwheel transmission mechanisms used in joint rotate vector reducers. Mech. Mach. Theory 2019, 137, 432–458. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, G.; Chang, L.; Chen, G. A modelling approach for kinematic equivalent mechanism and rotational transmission error of RV reducer. Mech. Mach. Theory 2021, 163, 104384. [Google Scholar] [CrossRef]
- Li, X.; Li, C.; Wang, Y.; Chen, B.; Lim, T.C. Analysis of a cycloid speed reducer considering tooth profile modification and clearance-fit output mechanism. J. Mech. Des. 2017, 139, 033303. [Google Scholar] [CrossRef]
- Sun, X.; Han, L.; Wang, J. Tooth modification and loaded tooth contact analysis of China Bearing Reducer. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 6240–6261. [Google Scholar] [CrossRef]
- Li, T.; Xu, H.; Tian, M. A Loaded Analysis Method for RV Cycloidal-pin Transmission Based on the Minimum Energy Principle. Stroj. Vestn./J. Mech. Eng. 2020, 66, 655–667. [Google Scholar] [CrossRef]
- Song, H. The sliding problem of cycloidal pinwheel planetary transmission. J. East China Inst. Metall. 1988, 2, 79–87. [Google Scholar]
- Li, C. Relative motion and sliding coefficient of cycloid pin gear planetary transmission teeth. J. Mech. Transm. 1998, 3, 20–22. [Google Scholar]
- Yi, W. Basic Theoretical Research of the Curve-Surface Meshing Planetary Gear Drive with Small Tooth Number Difference; Chongqing University: Chongqing, China, 2012. [Google Scholar]
- Wang, S.; Tian, G.; Jiang, X. Analysis on Sliding Velocity of Cycloid Gear Pair during Meshing. Sens. Transducers 2012, 16, 218. [Google Scholar]
- Ji, S. Design and Manufacturing Technology of Cycloid-Pin Gear Mechanism; Beijing University of Technology: Beijing, China, 2018. [Google Scholar]
- Xu, L.; Li, S.; Wang, W. Sliding ratio for novel cycloidal gear drive. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 3954–3963. [Google Scholar] [CrossRef]
- Zhang, B.; Wei, B.; Zhang, R. Research on evolution laws of pitch cones and characteristic values on whole tooth surface of hypoid gears. Mech. Mach. Theory 2022, 174, 104915. [Google Scholar] [CrossRef]
- Ding, H. Dynamic Wear Models for Gear Systems; Ohio State University: Columbus, OH, USA, 2007. [Google Scholar]
- Brandão, J.A.; Martins, R.; Seabra, J.H.; Castro, M.J. An approach to the simulation of concurrent gear micropitting and mild wear. Wear 2015, 324, 64–73. [Google Scholar] [CrossRef]
- Andersson, S. Wear simulation with a focus on mild wear in rolling and sliding contacts. Frict. Wear Wear Prot. 2009, 1–19. [Google Scholar]
- Rowe, C.N.; Pererson, M.B.; Winer, W.O. Friction and Wear; Spirnger: Cham, Switzerland, 2013. [Google Scholar]
- Flodin, A.; Sndersson, S. Wear Simulation of Spur Gears. Tribo Test 1999, 5, 225–249. [Google Scholar] [CrossRef]
- Flodin, A.; Sndersson, S. Simulation of mild wear in helical gears. Wear 2000, 241, 123–138. [Google Scholar] [CrossRef]
- Flodin, A.; Sndersson, S. A simplified model for wear prediction in helical gears. Wear 2001, 249, 285–292. [Google Scholar] [CrossRef]
- Janakiraman, V.; Li, S.; Kahraman, A. An Investigation of the Impacts of Contact Parameters on Wear Coefficient. J. Tribol. 2014, 136, 031602. [Google Scholar] [CrossRef]
- Priest, M.; Taylor, C.M. Automobile engine tribology—Approaching the surface. Wear 2000, 241, 193–203. [Google Scholar] [CrossRef]
- Wang, X.S.; Wu, S.J.; Zhou, X.H.; Hu, J.C. Nonlinear dynamics analysis of gear transmission system with wear fault. J. Vib. Shock. 2013, 32, 37–43, 69. [Google Scholar]
- Terauchi, Y.; Nagamura, K.; Ikejo, K. Study on friction loss of internal gear drives. JSME Int. J. Ser. 3 Vib. Control. Eng. Eng. Ind. 1991, 34, 106–113. [Google Scholar]
- Feng, S.; Mao, J.; Xie, Y. Analysis and calculation of gear mesh stiffness with tooth wear. J. Mech. Eng. 2015, 51, 27–32. [Google Scholar] [CrossRef]
- Ning, Z.; Chen, C. A study on wear degradation of internal spur gear under hybrid elastohydrodynamic lubrication. J. Vib. Shock. 2021, 40, 183–191. [Google Scholar]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Yan, R.; Chen, X. Research on Dynamic Response Characteristics and Condition Indicators of Gear Wear Fault. J. Mech. Eng. 2021, 57, 120–131. [Google Scholar]
- Su, J.; Li, C. Numerical calculation and analysis of wear of cycloid wheel of RV reducer. J. Mech. Transm. 2021, 45, 41–45. [Google Scholar]
- Zhang, R.; Zhou, J.; Wei, Z. Study on transmission error and torsional stiffness of RV reducer under wear. J. Mech. Sci. Technol. 2022, 36, 4067–4081. [Google Scholar] [CrossRef]
- Mihailidis, A.; Athanasopoulos, E.; Agouridas, K. EHL film thickness and load dependent power loss of cycloid reducers. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 1303–1317. [Google Scholar] [CrossRef]
- Kosse, V. Using hysteresis loop and torsional shock loading to assess damping and efficiency of cyclodrives. In Proceedings of the 14th International Congress on Sound Vibration (ICSV14), Cairns, QL, Australia, 9–12 July 2007; International Institute of Acoustics and Vibration (IIAV): Cairns, Australia, 2007; pp. 1–8. [Google Scholar]
- Zhou, C.; Wang, H. An adhesive wear prediction method for double helical gears based on enhanced coordinate transformation and generalized sliding distance model. Mech. Mach. Theory 2018, 128, 58–83. [Google Scholar] [CrossRef]
- Wang, H.; Zhou, C.; Lei, Y.; Liu, Z. An adhesive wear model for helical gears in line-contact mixed elastohydrodynamic lubrication. Wear 2019, 426, 896–909. [Google Scholar] [CrossRef]
- Wang, H.; Tang, L.; Zhou, C.; Shi, Z. Wear life prediction method of crowned double helical gear drive in point contact mixed elastohydrodynamic lubrication. Wear 2021, 484, 204041. [Google Scholar] [CrossRef]
- Kostić, N.; Blagojević, M.; Petrović, N.; Matejić, M.; Marjanović, N. Determination of real clearances between cycloidal speed reducer elements by the application of heuristic optimization. Trans. Famena 2018, 42, 15–26. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of cycloid gear teeth | 39 |
| Number of pin teeth | 40 |
| Radius of pin position (mm) | 66 |
| Poisson ratio | 0.3 |
| Radius of pin teeth (mm) | 3 |
| Tooth modification parameter for pin center distance (mm) | 0.05 |
| Tooth modification parameter for pin radius (mm) | 0.03 |
| Cycloid gear width (mm) | 10 |
| Roller gear (mm) | 22 |
| Elasticity (GPa) | 206 |
| Eccentricity (mm) | 1.3 |
| Input torque (Nm) | 400 |
| Surface roughness of cycloid gear and pin teeth | 0.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wei, B.; Wang, Z.; Yang, J.; Xu, J. Research on Loaded Contact Analysis and Tooth Wear Calculation Method of Cycloid–Pin Gear Reducer. Lubricants 2023, 11, 445. https://doi.org/10.3390/lubricants11100445
Wang Y, Wei B, Wang Z, Yang J, Xu J. Research on Loaded Contact Analysis and Tooth Wear Calculation Method of Cycloid–Pin Gear Reducer. Lubricants. 2023; 11(10):445. https://doi.org/10.3390/lubricants11100445
Chicago/Turabian StyleWang, Yongqiang, Bingyang Wei, Zhen Wang, Jianjun Yang, and Jiake Xu. 2023. "Research on Loaded Contact Analysis and Tooth Wear Calculation Method of Cycloid–Pin Gear Reducer" Lubricants 11, no. 10: 445. https://doi.org/10.3390/lubricants11100445
APA StyleWang, Y., Wei, B., Wang, Z., Yang, J., & Xu, J. (2023). Research on Loaded Contact Analysis and Tooth Wear Calculation Method of Cycloid–Pin Gear Reducer. Lubricants, 11(10), 445. https://doi.org/10.3390/lubricants11100445