On the Stiffness and Damping Characteristics of Line Contacts under Transient Elastohydrodynamic Lubrication



Abstract
:1. Introduction
2. Methodology
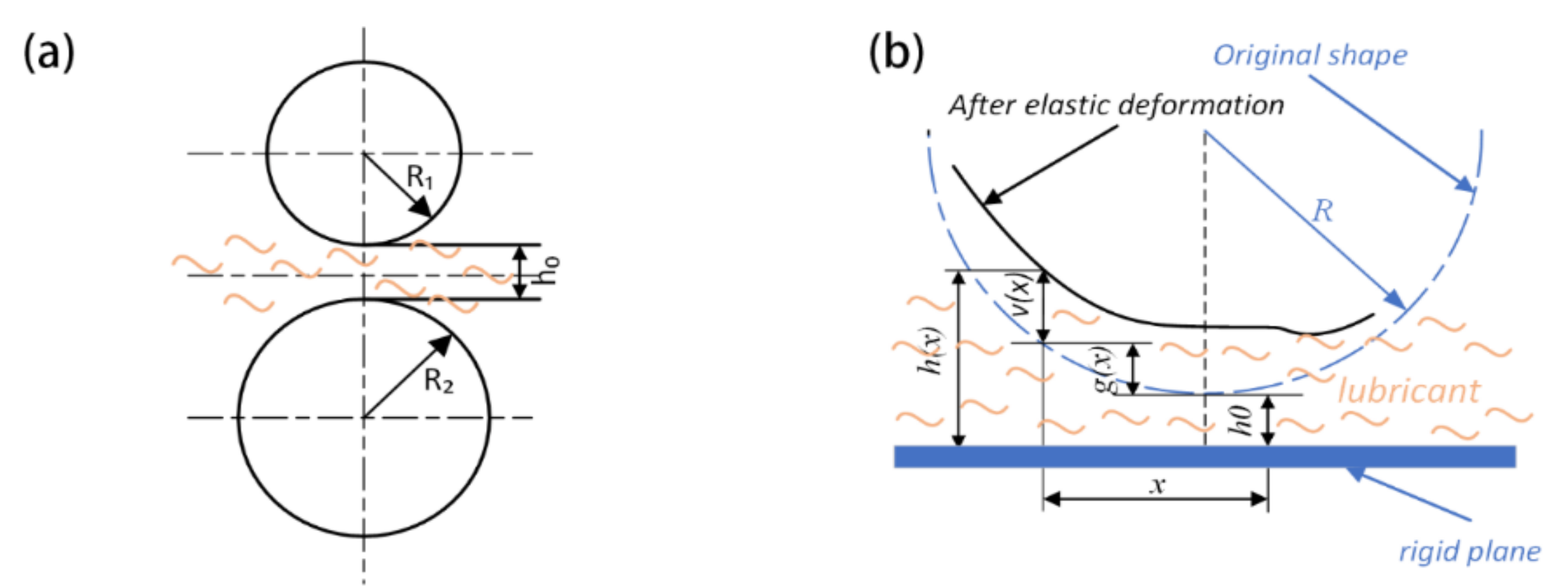
2.1. Governing Equation
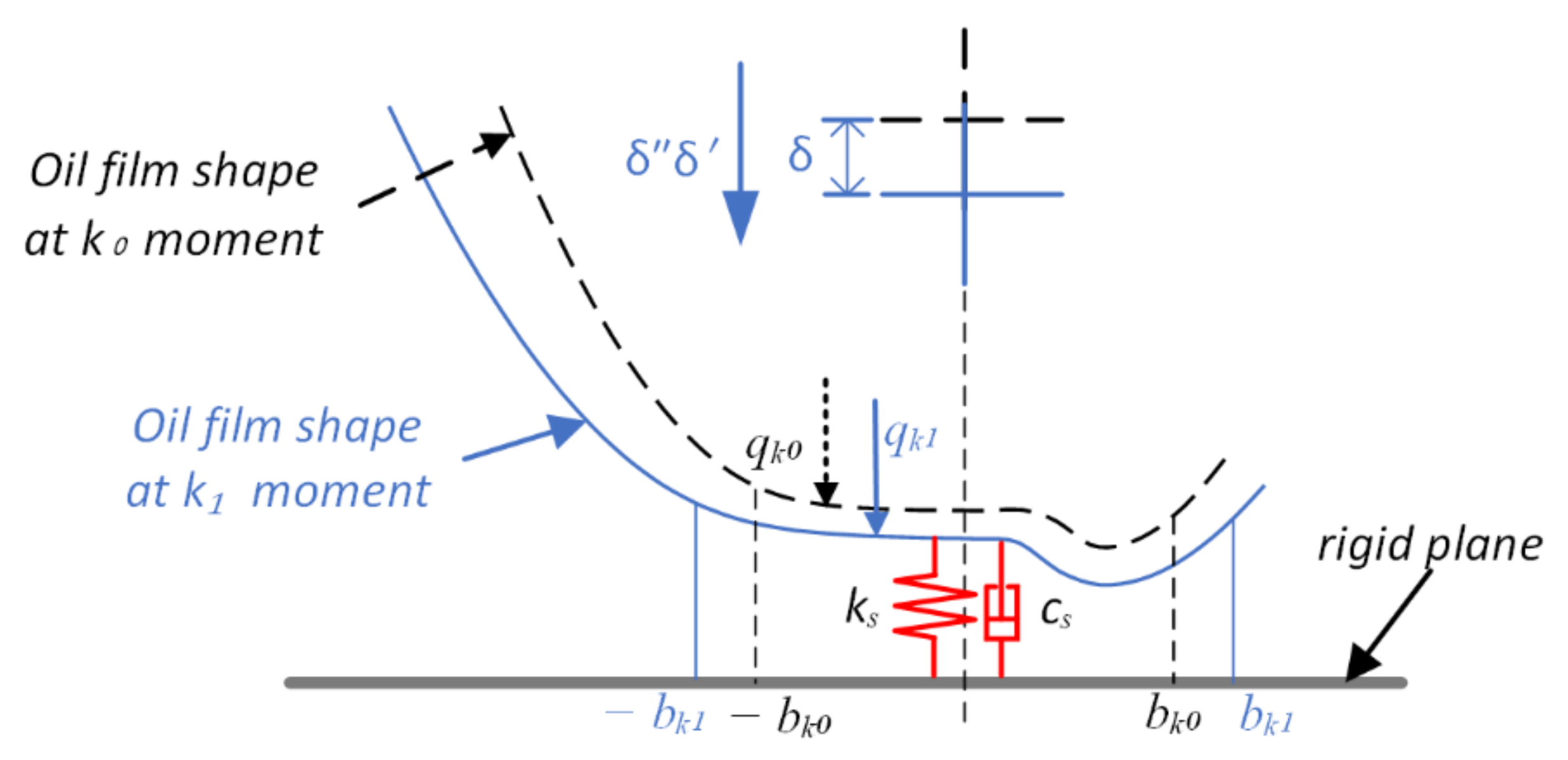
2.2. EHL Stiffness and Damping Calculation Models
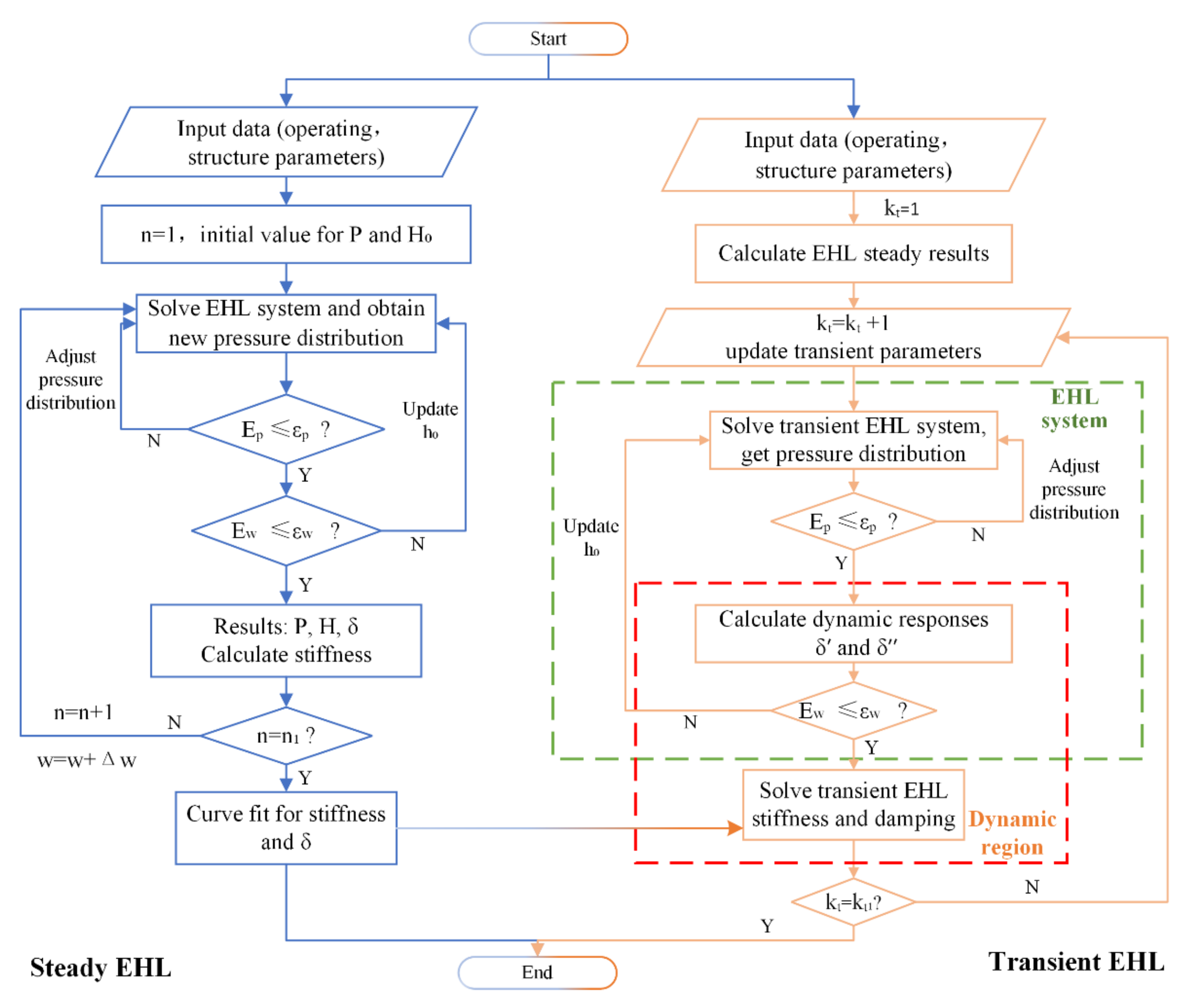
2.3. Numerical Solution
3. Results and Discussion
3.1. Parameter Input and Results
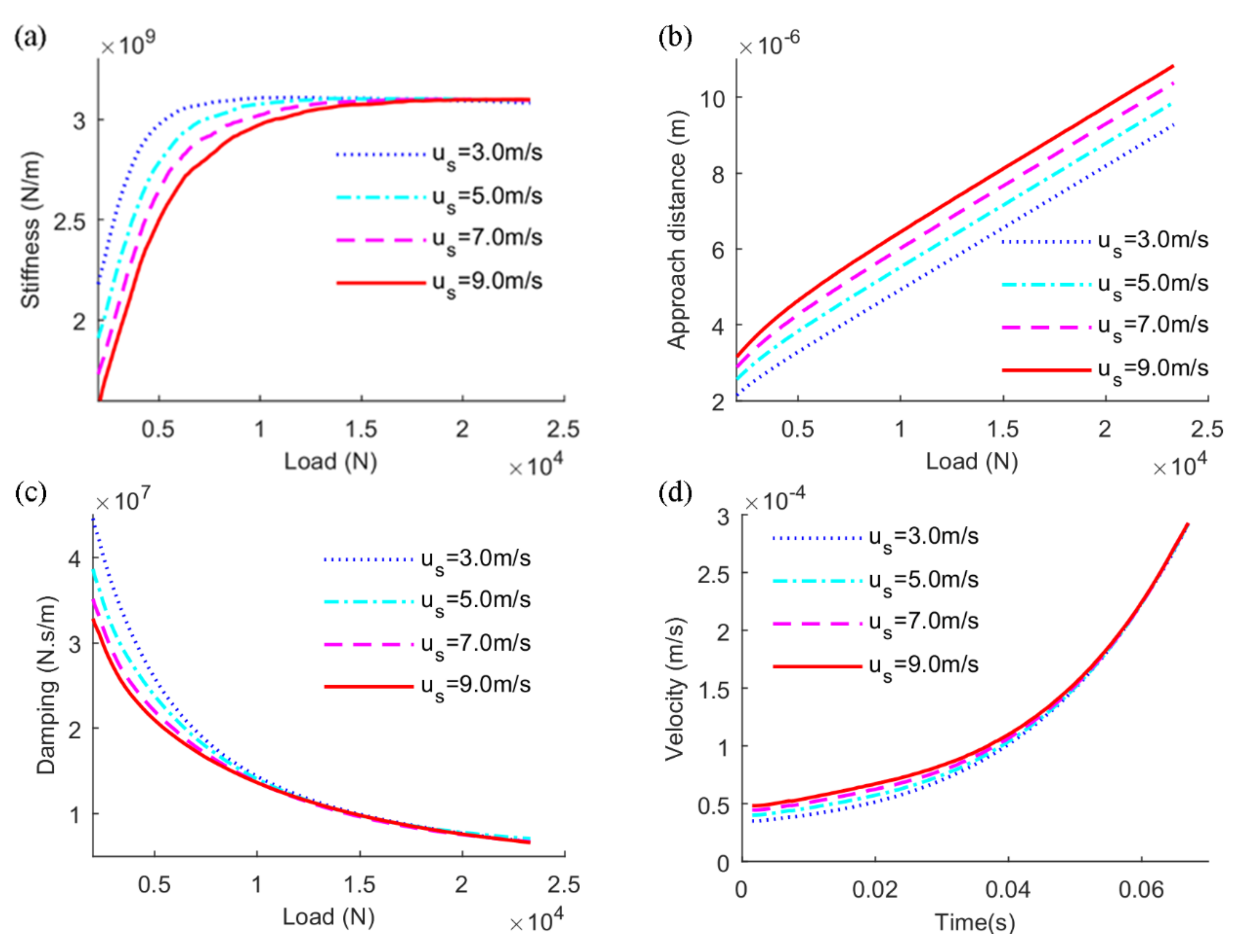
3.2. Effects of Entrainment Velocity
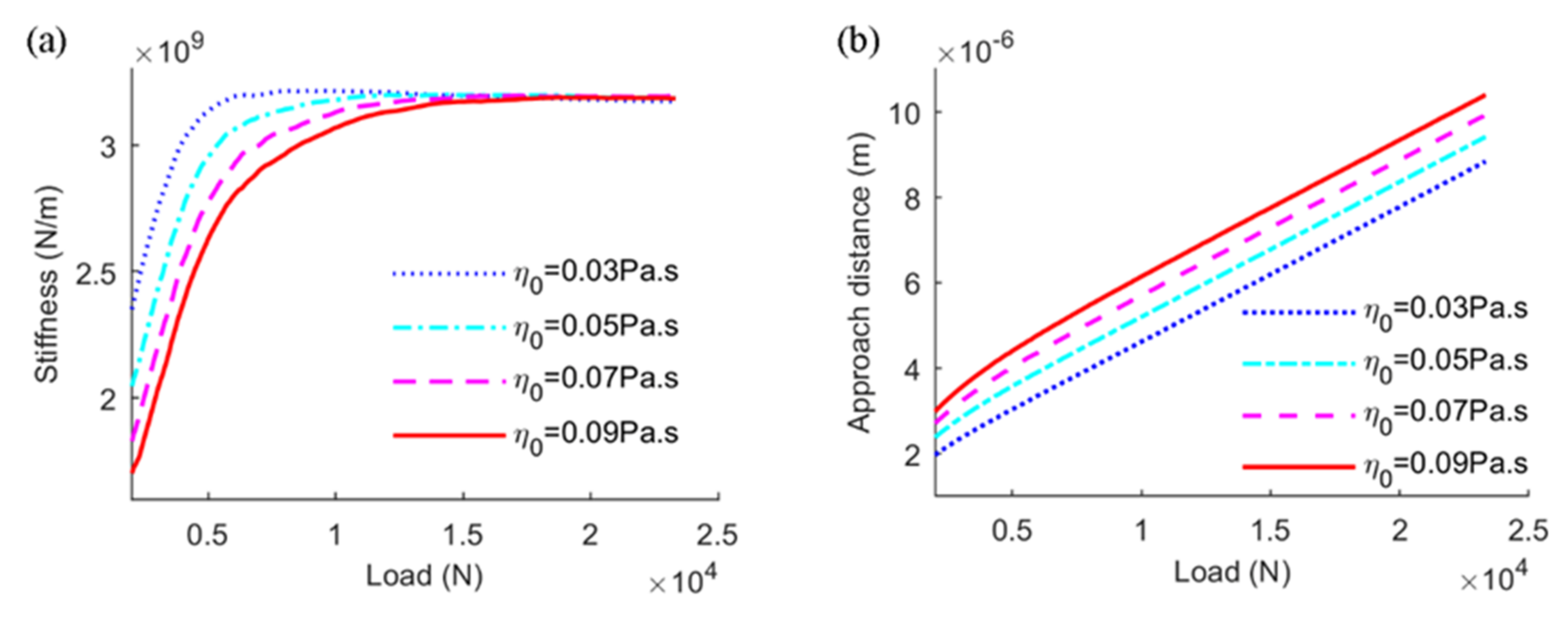
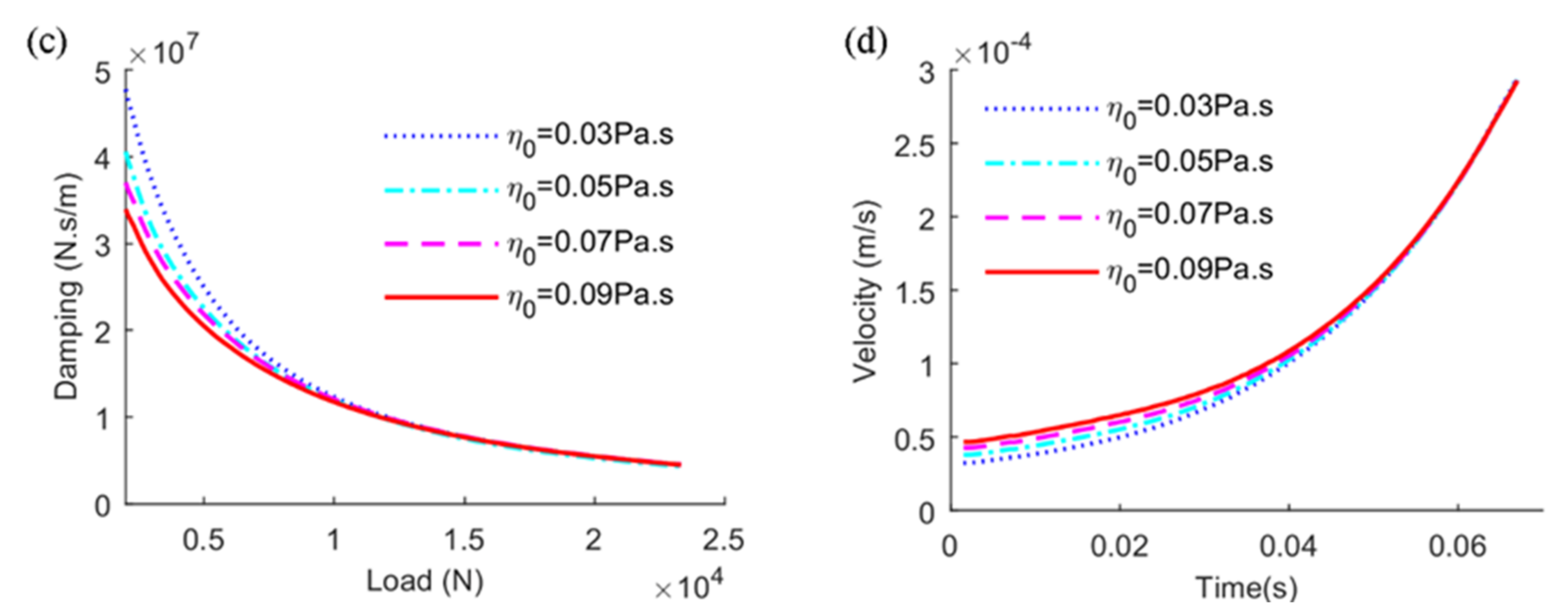
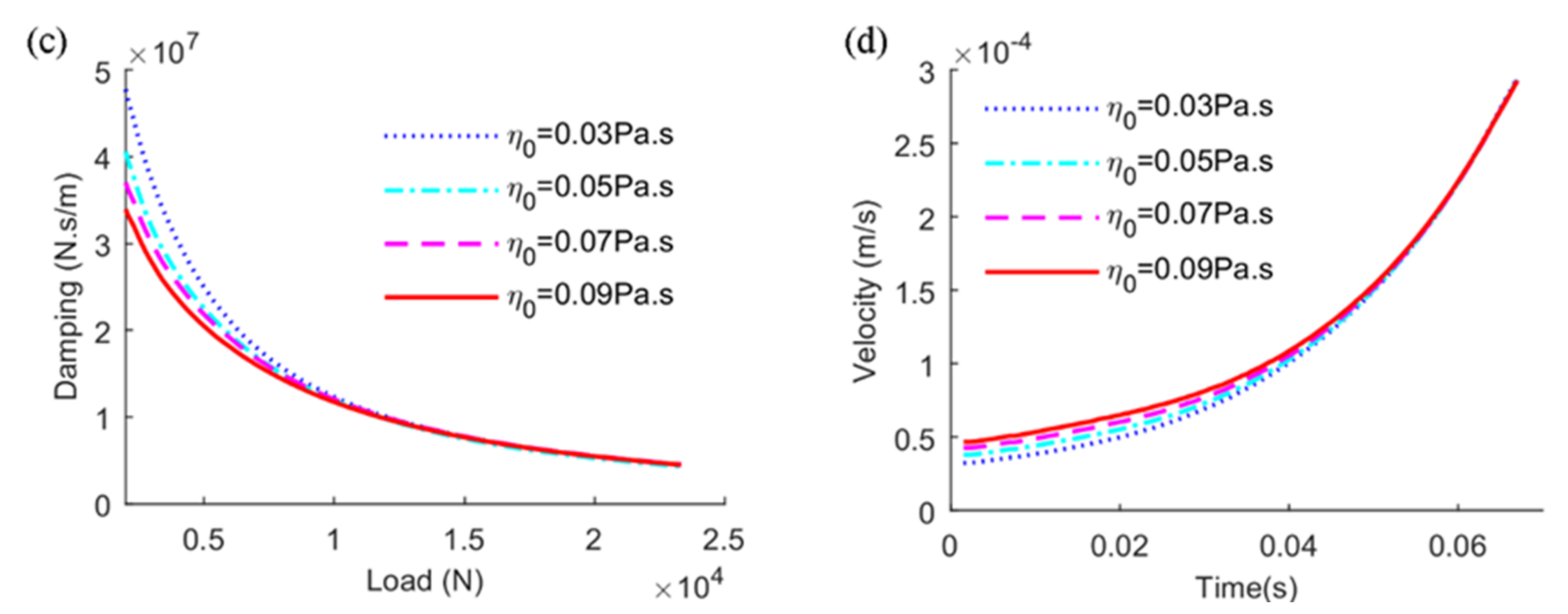
3.3. Effects of Lubricant Viscosity
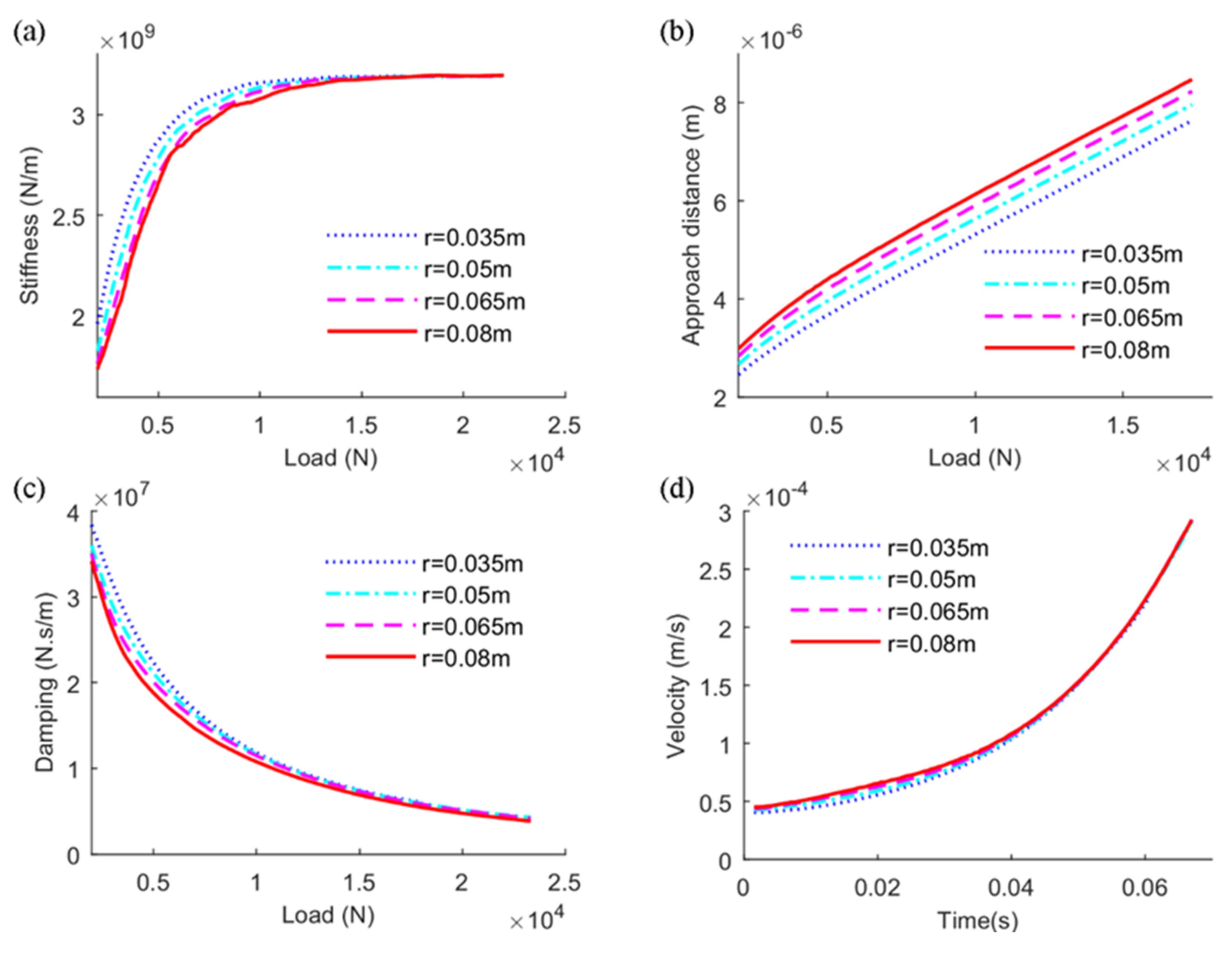
3.4. Effects of Equivalent Radius
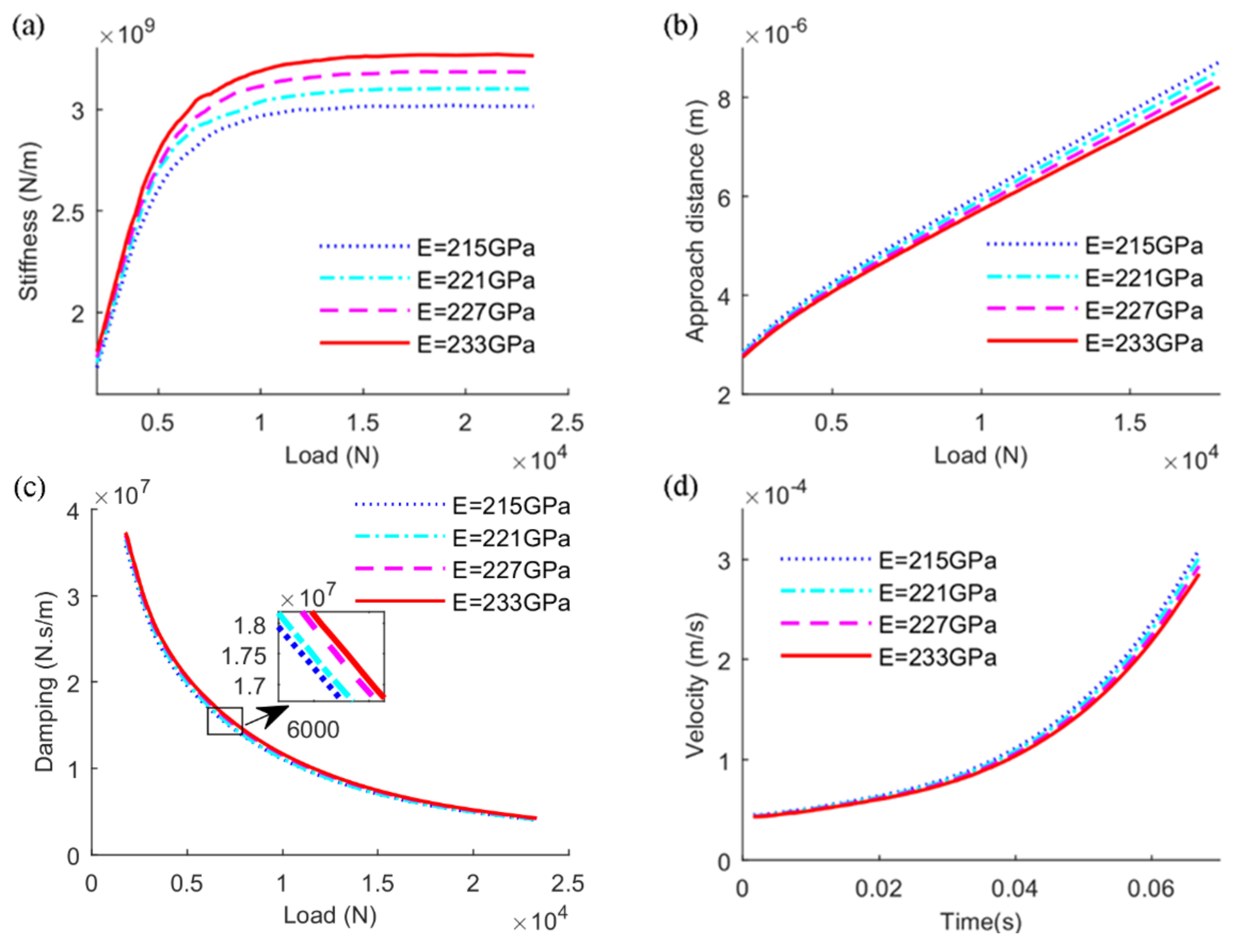
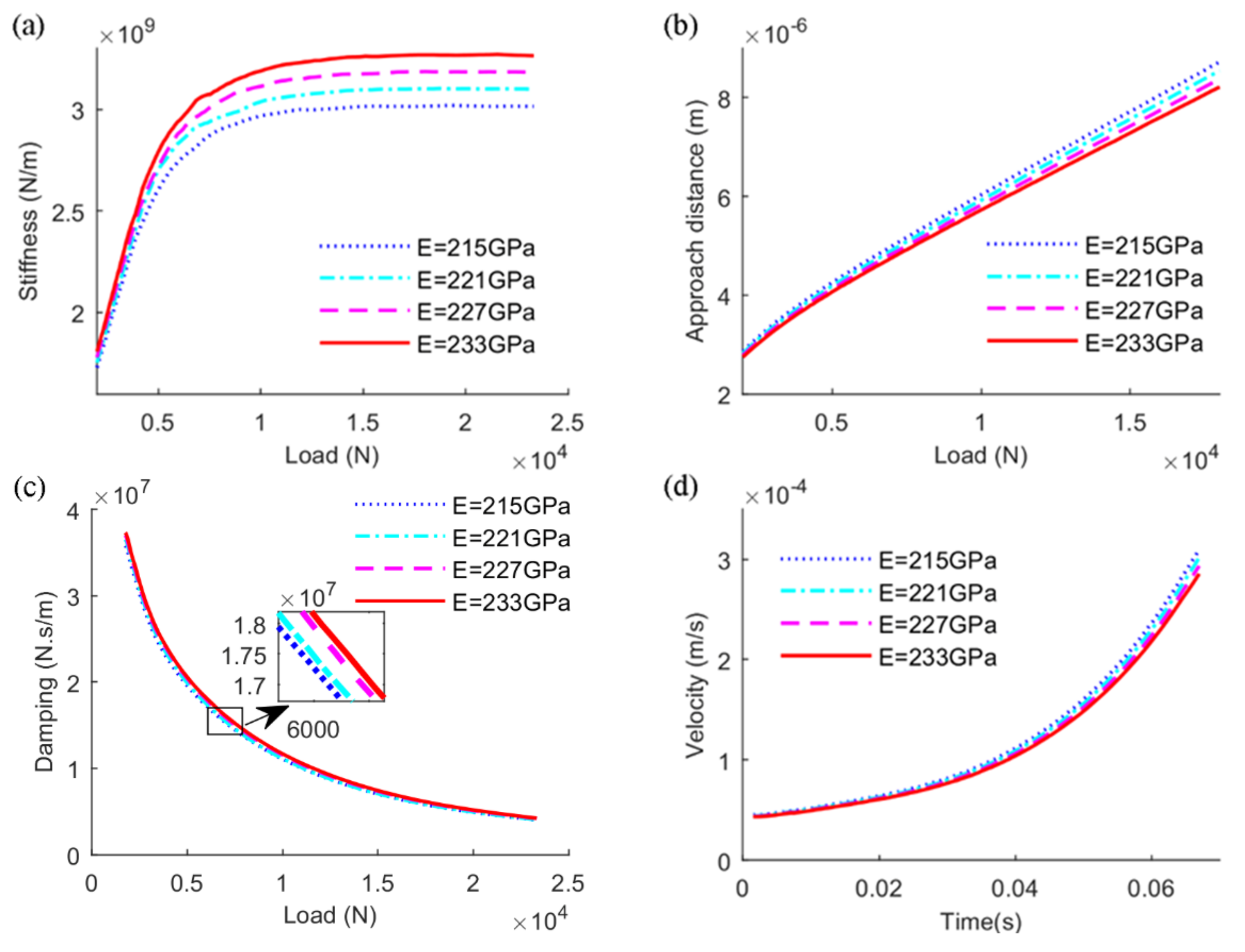
3.5. Effects of Elastic Modulus
4. Conclusions
- (1)
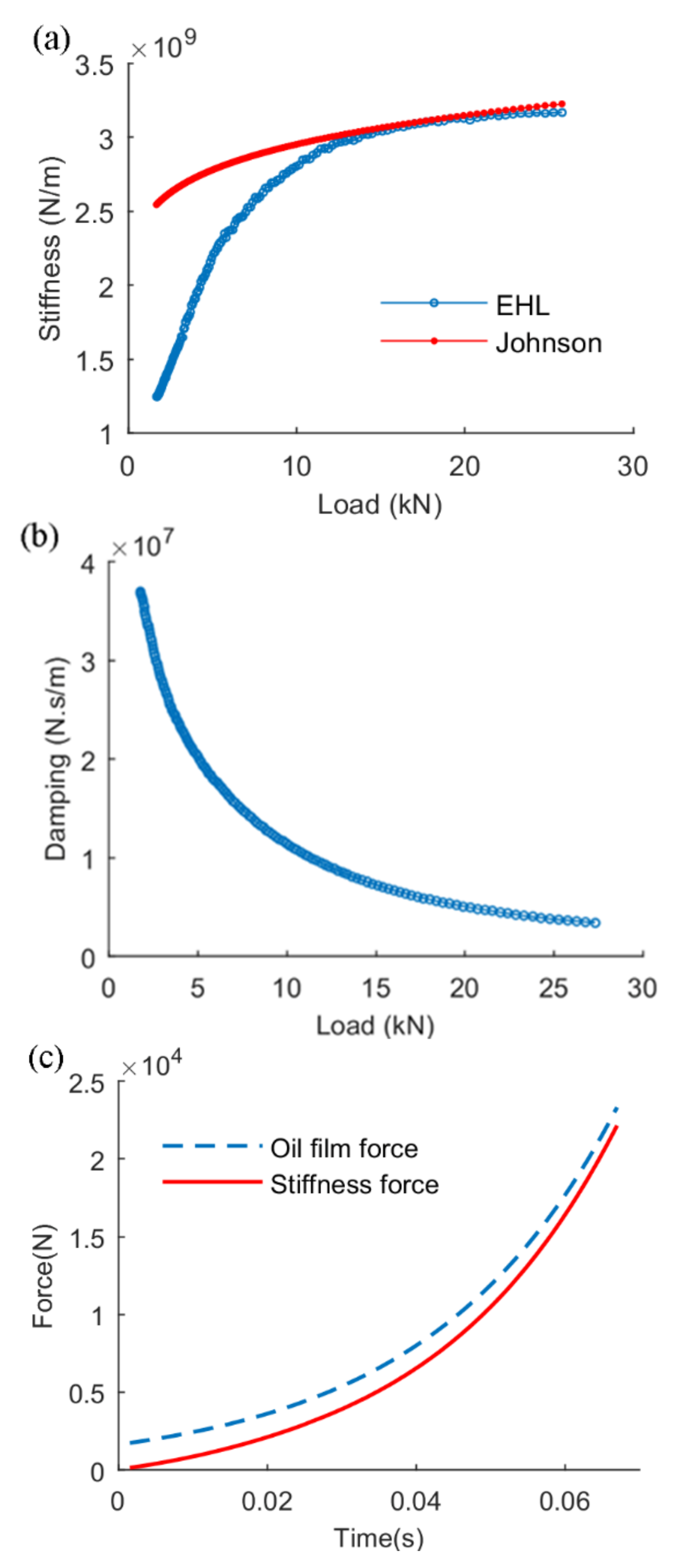
- In the aspects of dynamics performance, the stiffness and damping are more sensitive to the lubricating oil film when the applied load is light. The EHL stiffness raises and approaches to the level of Johnson theory while the EHL damping gradually decreases with the increasing applied load for the stiffness force plays an increasingly important role in the contact process over the applied load while the damping effects are gradually weakened.
- (2)
- According to the effects of operating conditions and structural parameters on the lubricating performances and dynamic characteristics, the larger value of entrainment velocity, higher lubricant viscosity, and larger curvature radius of the contact body lead to smaller stiffness and damping values under light load conditions because of the result of the film thickness being thicker and the approach distance being longer.
- (3)
- The effects of elastic modulus on EHL stiffness are increasingly obvious along the applied external load, and they dominate the maximum level of the friction pair, whereas they generate little effect on EHL damping characteristics.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, D.; Jane Wang, Q. Elastohydrodynamic Lubrication: A Gateway to Interfacial Mechanics—Review and Prospect. J. Tribol. 2011, 133, 133. [Google Scholar] [CrossRef]
- Skrinjar, L.; Slavič, J.; Boltežar, M. A review of continuous contact-force models in multibody dynamics. Int. J. Mech. Sci. 2018, 145, 171–187. [Google Scholar] [CrossRef]
- Nonato, F.; Cavalca, K. Investigation on the damping characteristics of elastohydrodynamic lubricated point contacts under dynamic loading. In Proceedings of the 10th International Conference on Vibrations in Rotating Machinery, London, UK, 11–13 September 2012; pp. 503–512. [Google Scholar]
- Wiegert, B.; Hetzler, H.; Seemann, W. A simplified elastohydrodynamic contact model capturing the nonlinear vibration behaviour. Tribol. Int. 2013, 59, 79–89. [Google Scholar] [CrossRef]
- Qin, W.; Chao, J.; Duan, L. Study on stiffness of elastohydrodynamic line contact. Mech. Mach. Theory 2015, 86, 36–47. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, H.; Zhu, C.; Song, C.; Li, Z. Influence of lubrication starvation and surface waviness on the oil film stiffness of elastohydrodynamic lubrication line contact. J. Vib. Control. 2018, 24, 924–936. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, UK, 1987. [Google Scholar]
- Yang, D.C.H.; Sun, Z.S. A Rotary Model for Spur Gear Dynamics. J. Mech. Transm. Autom. Des. 1985, 107, 529–535. [Google Scholar] [CrossRef]
- Tsuha, N.A.H.; Cavalca, K.L. Finite line contact stiffness under elastohydrodynamic lubrication considering linear and nonlinear force models. Tribol. Int. 2020, 146, 106219. [Google Scholar] [CrossRef]
- Pei, J.; Han, X.; Tao, Y. An improved stiffness model for line contact elastohydrodynamic lubrication and its application in gear pairs. Ind. Lubr. Tribol. 2020, 72, 703–708. [Google Scholar] [CrossRef]
- Wang, Z.; Pu, W.; Pei, X.; Cao, W. Contact stiffness and damping of spiral bevel gears under transient mixed lubrication conditions. Friction 2022, 10, 545–559. [Google Scholar] [CrossRef]
- Zhou, C.; Xiao, Z.; Chen, S.; Han, X. Normal and tangential oil film stiffness of modified spur gear with non-Newtonian elastohydrodynamic lubrication. Tribol. Int. 2017, 109, 319–327. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.; Xiao, Z. Stiffness and damping models for the oil film in line contact elastohydrodynamic lubrication and applications in the gear drive. Appl. Math. Model. 2018, 61, 634–649. [Google Scholar] [CrossRef]
- Xiao, Z.; Shi, X. Investigation on stiffness and damping of transient non-Newtonian thermal elastohydrodynamic point contact for crowned herringbone gears. Tribol. Int. 2019, 137, 102–112. [Google Scholar] [CrossRef]
- Xiao, Z.; Li, Z.; Shi, X.; Zhou, C. Oil Film Damping Analysis in Non-Newtonian Transient Thermal Elastohydrodynamic Lubrication for Gear Transmission. J. Appl. Mech. 2018, 85, 85. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, H.; Zhu, C.; Liu, M.; Song, C. Oil film stiffness and damping in an elastohydrodynamic lubrication line contact-vibration. J. Mech. Sci. Technol. 2016, 30, 3031–3039. [Google Scholar] [CrossRef]
- Tsuha, N.A.H.; Cavalca, K.L. Stiffness and damping of elastohydrodynamic line contact applied to cylindrical roller bearing dynamic model. J. Sound Vib. 2020, 481, 115444. [Google Scholar] [CrossRef]
- Tsuha, N.A.H.; Nonato, F.; Cavalca, K.L. Stiffness and Damping Reduced Model in EHD Line Contacts. In Proceedings of the 10th International Conference on Rotor Dynamics—IFToMM; Springer: Cham, Switzerland, 2019; pp. 43–55. [Google Scholar]
- Hultqvist, T.; Shirzadegan, M.; Vrcek, A.; Baubet, Y.; Prakash, B.; Marklund, P.; Larsson, R. Elastohydrodynamic lubrication for the finite line contact under transient loading conditions. Tribol. Int. 2018, 127, 489–499. [Google Scholar] [CrossRef]
- Wijnant, Y.H.; Venner, C.H.; Larsson, R.; Eriksson, P. Effects of Structural Vibrations on the Film Thickness in an EHL Circular Contact. J. Tribol. 1999, 121, 259–264. [Google Scholar] [CrossRef]
- Wen, S.; Huang, P. Principles of Tribology; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Huang, P. Numerical Calculation Methods of Elastohydrodynamic Lubrication; Tsinghua University Press: Beijing, China, 2013. [Google Scholar]
- Grubin, A.N. Investigation of the Contact of Machine Components; The Central Mechanical Engineering Research Institute: Moscow, Russia, 1949. [Google Scholar]
- Roeland, C. Correlation Aspect of the Viscosity-Temperature-Pressure Relation of Lubrication Oils. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1966. [Google Scholar]
- Dowson, D.; Higginson, G.R. Elasto-Hydrodynamic Lubrication; Pergamon: Oxford, UK, 1977. [Google Scholar]
- Tsuha, N.A.H.; Nonato, F.; Cavalca, K.L. Formulation of a reduced order model for the stiffness on elastohydrodynamic line contacts applied to cam-follower mechanism. Mech. Mach. Theory 2017, 113, 22–39. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Inlet coordinate | −4.0b | Outlet coordinate | 1.4b |
| Time step | 0.0005 s | Entrainment velocity | 6.6 m/s |
| Lubricant viscosity | 0.075 Pa. s | Equivalent Elastic modulus E | 2.21 × 1011 Pa |
| Equivalent curvature radius | 0.06 m | Contact length | 0.046 m |
| Initial external load | 0.35 × 105 N/m | Density of contact body | 7810 kg/m3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, C.; Zhu, A.; Zhou, W.; Peng, Y.; Meng, X. On the Stiffness and Damping Characteristics of Line Contacts under Transient Elastohydrodynamic Lubrication. Lubricants 2022, 10, 73. https://doi.org/10.3390/lubricants10040073
Fang C, Zhu A, Zhou W, Peng Y, Meng X. On the Stiffness and Damping Characteristics of Line Contacts under Transient Elastohydrodynamic Lubrication. Lubricants. 2022; 10(4):73. https://doi.org/10.3390/lubricants10040073
Chicago/Turabian StyleFang, Congcong, Anyuan Zhu, Wei Zhou, Yongdong Peng, and Xianghui Meng. 2022. "On the Stiffness and Damping Characteristics of Line Contacts under Transient Elastohydrodynamic Lubrication" Lubricants 10, no. 4: 73. https://doi.org/10.3390/lubricants10040073
APA StyleFang, C., Zhu, A., Zhou, W., Peng, Y., & Meng, X. (2022). On the Stiffness and Damping Characteristics of Line Contacts under Transient Elastohydrodynamic Lubrication. Lubricants, 10(4), 73. https://doi.org/10.3390/lubricants10040073