Novel Tribometer for Coated Self-Lubricating Spherical Plain Bearings in a Vacuum


 ,
,
Abstract
1. Introduction
2. Design and Verification of the Tribometer
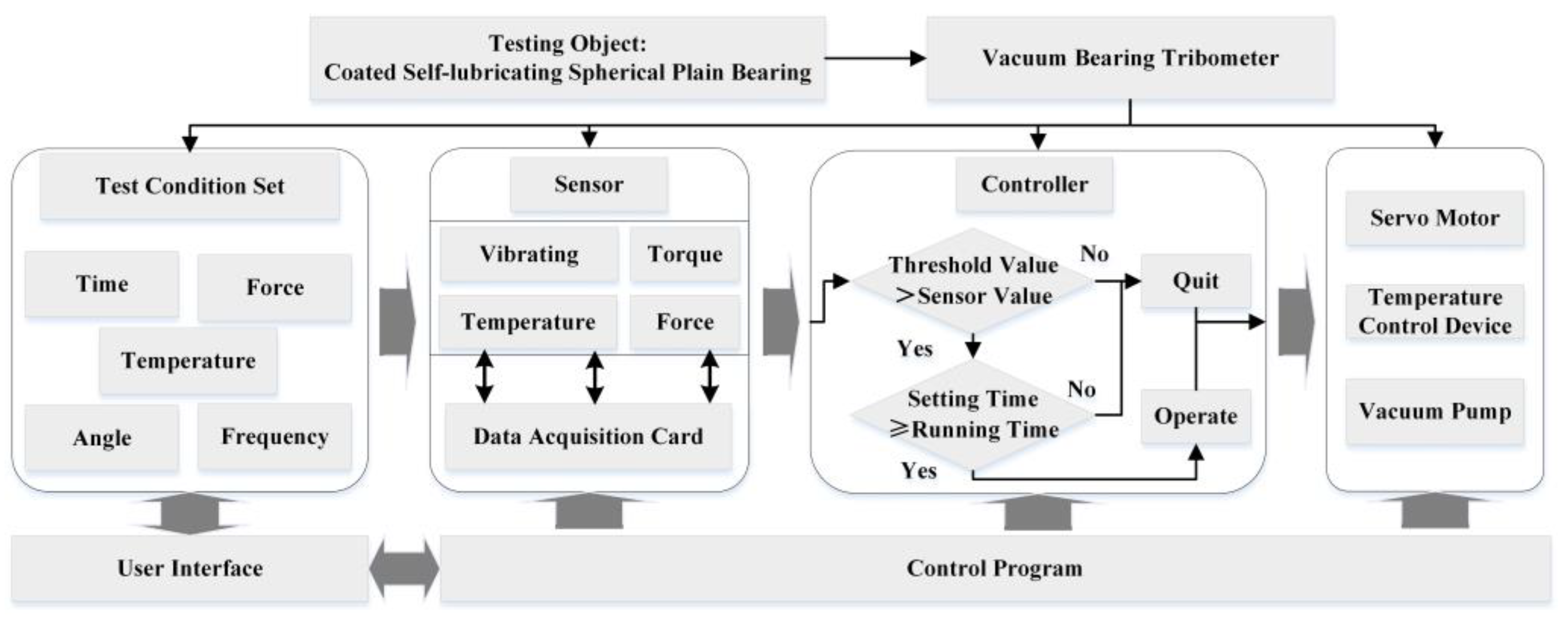
2.1. Requirement Definition and Overall Design
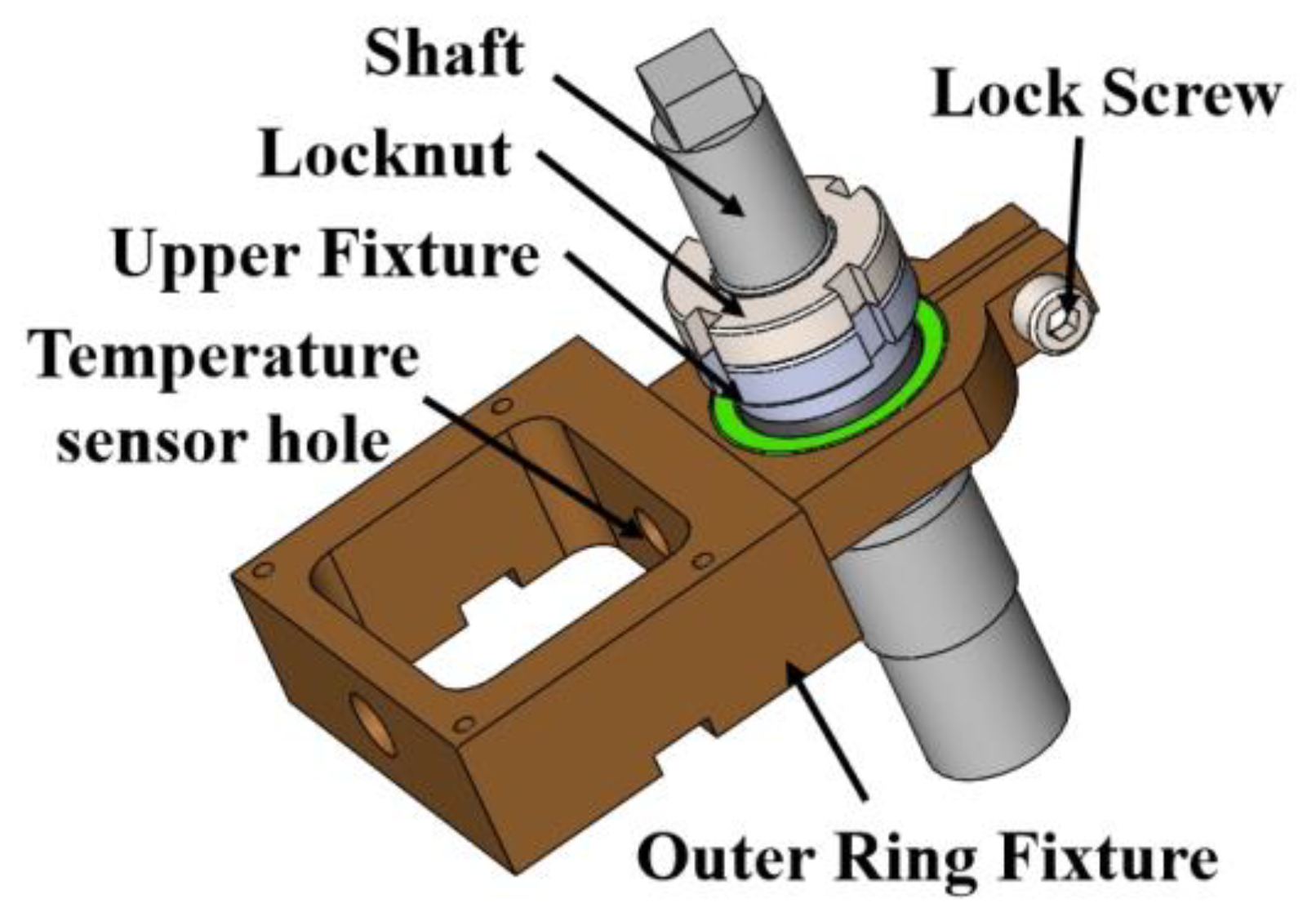
2.2. Bearing Fixture System
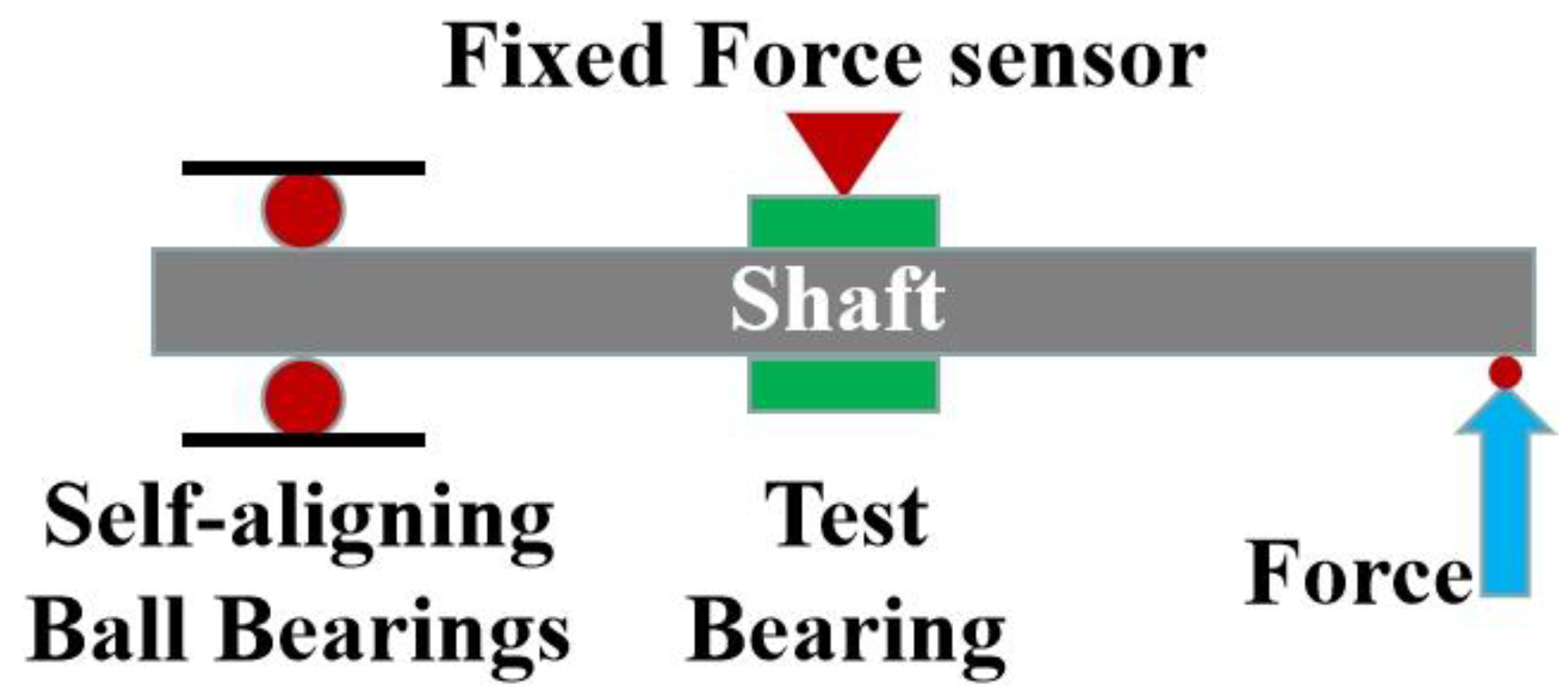
2.3. Radial Force System
2.4. Reciprocating Rotational Motion System
2.5. Environment Control System
2.6. Data Acquisition System
2.7. Tribometer Test
3. Result and Discussion
3.1. Coated SSPBs Preparation
3.2. Tribological Properties
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qiu, M.; Miao, Y.; Li, Y.; Lu, J. Film-forming mechanisms for self-lubricating radial spherical plain bearings with hybrid PTFE/aramid fabric liners modified by ultrasonic. Tribol. Int. 2015, 87, 132–138. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, J.; Liu, C.; Zhao, J.; Zheng, X.; Hu, Z. Research on loading parameters of roller swaging process of self-lubricating spherical plain bearings. Int. J. Adv. Manuf. Technol. 2022, 118, 3737–3747. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, Z.; Hu, Z.; Li, L.; Yang, Q.; Xing, X. Tribological performance of hydrogenated diamond-like carbon coating deposited on superelastic 60NiTi alloy for aviation self-lubricating spherical plain bearings. Chin. J. Aeronaut. 2022, in press. [Google Scholar] [CrossRef]
- Zhang, Q.; Hu, Z.; Yang, Y.; Ma, J.; Qi, X. Investigation of the roller swaging process for self-lubricating spherical plain bearings assembly. J. Mater. Process. Tech. 2017, 241, 36–45. [Google Scholar] [CrossRef]
- Qiu, M.; Lu, J.; Li, Y.; Lv, G. Investigation on MoS2 and graphite coatings and their effects on the tribological properties of the radial spherical plain bearings. Chin. J. Mech. Eng. 2016, 29, 844–852. [Google Scholar] [CrossRef]
- Xue, Y.; Yan, S.; Xie, J.; Feng, Z.; Zou, J. Contact and tribological properties of self-lubricating ellipsoidal plain bearings. Tribol. Int. 2019, 140, 105840. [Google Scholar] [CrossRef]
- Guo, Z.; Xiong, D.; Ge, S. Effect of stain less steel surface roughness on the friction and wear properties of Ultra-high molecular weight polyethylene. Part A Phys. Test. 2001, 09, 369–372. [Google Scholar]
- Shen, Y.; Zhou, H.; Wang, H.; Liao, B.; Wu, X.; Zhang, X. Tribological behavior of diamond-like carbon coatings with patterned structure deposited by the filtered cathodic vacuum arc. Thin Solid Films 2019, 685, 123–130. [Google Scholar] [CrossRef]
- Chen, X.; Li, J. Superlubricity of carbon nanostructures. Carbon 2020, 158, 1–23. [Google Scholar] [CrossRef]
- Fan, X.; Xue, Q.; Wang, L. Carbon-based solid-liquid lubricating coatings for space applications-A review. Friction 2015, 3, 191–207. [Google Scholar] [CrossRef]
- Li, Z.; Ma, G.; Xing, Z.; Yong, Q.; Zhao, H.; Huang, Y.; Guo, W.; Zhang, Z.; Wang, H. The effects of Cr and B doping on the mechanical properties and tribological behavior of multi-layered hydrogenated diamond-like carbon films. Surf. Coat. Tech. 2022, 431, 127977. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, B.; Cao, Z.; Shi, P.; Zhou, N.; Zhang, B.; Zhang, J.; Qian, L. Probing superlubricity stability of hydrogenated diamond-like carbon film by varying sliding velocity. Appl. Surf. Sci. 2018, 439, 976–982. [Google Scholar] [CrossRef]
- Solis, J.; Zhao, H.; Wang, C.; Verduzco, J.A.; Bueno, A.S.; Neville, A. Tribological performance of an H-DLC coating prepared by PECVD. Appl. Surf. Sci. 2016, 383, 222–232. [Google Scholar] [CrossRef]
- Jiadong, S.; Guozheng, M.; Cuihong, H.; Haidou, W.; Guolu, L.; Aobo, W.; Yunfan, L.; Qingsong, Y. The tribological performance in vacuum of DLC coating treated with graphene spraying top layer. Diam. Relat. Mater. 2022, 125, 108998. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, G.; Zhu, L.; Wang, H.; Han, C.; Li, Z.; Wang, H.; Yong, Q.; Huang, Y. Structure–Performance evolution mechanism of the wear failure process of coated spherical plain bearings. Eng. Fail. Anal. 2022, 135, 106097. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, G.; Qin, H.; Han, C.; Shi, J. Research on damage and failure behaviour of coated self-lubricating spherical plain bearings based on detection of friction torque and temperature rise. Proc. Inst. Mech. Eng. Part J. J. Eng. Tribol. 2022, 236, 514–526. [Google Scholar] [CrossRef]
- Xue, Y.; Chen, J.; Guo, S.; Meng, Q.; Luo, J. Finite element simulation and experimental test of the wear behavior for self-lubricating spherical plain bearings. Friction 2018, 6, 297–306. [Google Scholar] [CrossRef]
- Lu, G.; Yang, X.; Qi, X.; Yan, X.; Dong, Y.; Yao, W.; Liang, L. A long lifetime PTFE/aramid fiber composite liner modified by microcapsules under a high-frequency swing condition. Tribol. Int. 2022, 173, 107624. [Google Scholar] [CrossRef]
- Jian, L.; Fei, L.; Tiantian, H.; Xianjuan, P.; Yongzhen, Z. Wear mechanism of Nomex/PTFE fiber reinforced composites. Mater. Res. Express. 2022, 9, 45303. [Google Scholar] [CrossRef]
- Jiang, J.; Arnell, R.D. The effect of sliding speed on wear of diamond-like carbon coatings. Wear 1998, 218, 223–231. [Google Scholar] [CrossRef]
- Helen Xu, G.; Liang, H.; Woodford, J.B.; Johnson, J.A. Temperature dependence of diamond like carbon film tribological characteristics. J. Am. Ceram. Soc. 2005, 88, 3110–3115. [Google Scholar] [CrossRef]
- Bobach, L.; Bartel, D.; Beilicke, R.; Mayer, J.; Michaelis, K.; Stahl, K.; Bachmann, S.; Schnagl, J.; Ziegele, H. Reduction in EHL Friction by a DLC Coating. Tribol. Lett. 2015, 60, 17. [Google Scholar] [CrossRef]
- Shen, C.; Khonsari, M.M.; Spadafora, M.; Ludlow, C. Tribological Performance of Polyamide-Imide Seal Ring Under Seawater Lubrication. Tribol. Lett. 2016, 62, 39. [Google Scholar] [CrossRef]
- Chen, S.; Yin, N.; Yu, Q.; Zhang, Z. A novel tribometer for investigating bushing wear. Wear 2019, 430–431, 263–271. [Google Scholar] [CrossRef]
- Shi, J.; Ma, G.; Han, C.; Li, G.; Liu, Y.; Liu, Q. Tribological properties and bearing application of Mo-based films in space environment. Vacuum 2021, 188, 110217. [Google Scholar] [CrossRef]
- Trobentar, B.; Kulovec, S.; Hlebanja, G.; Glodež, S. Experimental failure analysis of S-polymer gears. Eng. Fail. Anal. 2020, 111, 104496. [Google Scholar] [CrossRef]
- ACBG Plain Bearing Committee. Bearings, Plain, Self-Aligning, Self-Lubricating, High Speed Oscillation −65 to +160 F General Specification for AS81819A. 2017. Available online: https://saemobilus.sae.org/content/as81819a (accessed on 13 August 2022).
- CEN. Bearing, Spherical Plain in Corrosion Resisting Steel with Self-Lubricating Liner-Elevated Load at Ambient Temperature-Technical Specification. EN2755. 2009. Available online: https://www.techstreet.com/standards/din-en-2755?product_id=1652148 (accessed on 10 August 2022).
- Chen, Z.; Hillairet, J.; Turq, V.; Song, Y.; Yang, Q.; Lombard, G.; Vulliez, K.; Mollard, P.; Volpe, R.; Bernard, J.M.; et al. Multifunctional tribometer development and performance study of CuCrZr-316L material pair for ITER application. Tribol. Int. 2017, 116, 208–216. [Google Scholar] [CrossRef]
- Ben Jemaa, M.C.; Mnif, R.; Fehri, K.; Elleuch, R. Design of a New Tribometer for Tribological and Viscoelasticity Studies of PTFE Valve Seats. Tribol. Lett. 2011, 45, 177–184. [Google Scholar] [CrossRef]
- Qiu, M.; Miao, Y.; Li, Y.; Chen, L.; Hu, R.; Lu, J. Effects of woven liners treated by LaCl3 or CeO2 solution on film formation mechanisms of self-lubricating radial spherical plain bearings. Ind. Lubr. Tribol. 2016, 68, 308–314. [Google Scholar] [CrossRef]
- Qiu, M.; Yang, Z.; Lu, J.; Li, Y.; Zhou, D. Influence of step load on tribological properties of self-lubricating radial spherical plain bearings with PTFE fabric liner. Tribol. Int. 2017, 113, 344–353. [Google Scholar] [CrossRef]
- Zheng, Y.; Bo, H.; Dong, D. The study on the hydraulic control rod driving system in cyclical swing. Nucl. Eng. Des. 2007, 237, 100–106. [Google Scholar] [CrossRef]
- Nevshupa, R.A.; Conte, M.; Igartua, A.; Roman, E.; de Segovia, J.L. Ultrahigh vacuum system for advanced tribology studies: Design principles and applications. Tribol. Int. 2015, 86, 28–35. [Google Scholar] [CrossRef]
- Raghavendra, C.R.; Basavarajappa, S.; Sogalad, I. Analysis of temperature field in dry sliding wear test on pin-on-disc. Heat Mass Transfer. 2018, 55, 1545–1552. [Google Scholar] [CrossRef]
- Liu, H.; Tanaka, A.; Umeda, K. The tribological characteristics of diamond-like carbon films at elevated temperatures. Thin Solid Films 1999, 346, 162–168. [Google Scholar] [CrossRef]
- Wang, J.; Pu, J.; Zhang, G.; Wang, L. Architecture of superthick diamond-like carbon films with excellent high temperature wear resistance. Tribol. Int. 2015, 81, 129–138. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Overall dimensions | ≤360 × 250 ×250 mm |
| Size range of test bearings | 8~30 mm |
| Load | 0~250 N |
| Friction torque | 0~1 Nm |
| Reciprocating rotation frequency | 0~3 Hz |
| Maximum pendulum angle | ±45° |
| Vacuum degree | ≤1 × 10−3 Pa |
| Temperature control | 15~30 °C |
| Sensor | Range | Accuracy |
|---|---|---|
| Temperature sensor | −50~200 °C | ±(0.15 + 0.002|Temperature|) |
| Force sensor | 0~500 N | 0.03%FS |
| Torque sensor | 0~±1 Nm | ±0.2%FS |
| Vibration sensor | 0~±50 g | 0.002 g |
| Experiment Parameter | Control Group (Sample A) | Experimental Group (Sample B) |
|---|---|---|
| Load | 185 N | |
| Reciprocating frequency | 2 Hz | |
| Reciprocating Angle | 15° | |
| Test Time | 20 h | |
| Initial/steady Vacuum Degree | 5 Pa/0.2 Pa | |
| Acquisition Frequency | 2 Hz | |
| Control Friction Heat | No | Yes (25 °C) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zhang, Z.; Yong, Q.; Ma, G.; Wei, A.; Wang, H. Novel Tribometer for Coated Self-Lubricating Spherical Plain Bearings in a Vacuum. Lubricants 2022, 10, 291. https://doi.org/10.3390/lubricants10110291
Li Z, Zhang Z, Yong Q, Ma G, Wei A, Wang H. Novel Tribometer for Coated Self-Lubricating Spherical Plain Bearings in a Vacuum. Lubricants. 2022; 10(11):291. https://doi.org/10.3390/lubricants10110291
Chicago/Turabian StyleLi, Zhen, Zhinan Zhang, Qingsong Yong, Guozheng Ma, Aobo Wei, and Haidou Wang. 2022. "Novel Tribometer for Coated Self-Lubricating Spherical Plain Bearings in a Vacuum" Lubricants 10, no. 11: 291. https://doi.org/10.3390/lubricants10110291
APA StyleLi, Z., Zhang, Z., Yong, Q., Ma, G., Wei, A., & Wang, H. (2022). Novel Tribometer for Coated Self-Lubricating Spherical Plain Bearings in a Vacuum. Lubricants, 10(11), 291. https://doi.org/10.3390/lubricants10110291