
A Redundantly Actuated Chewing Robot Based on Human Musculoskeletal Biomechanics: Differential Kinematics, Stiffness Analysis, Driving Force Optimization and Experiment


Abstract
:1. Introduction
2. The Masticatory System and Redundantly Actuated Chewing Robot
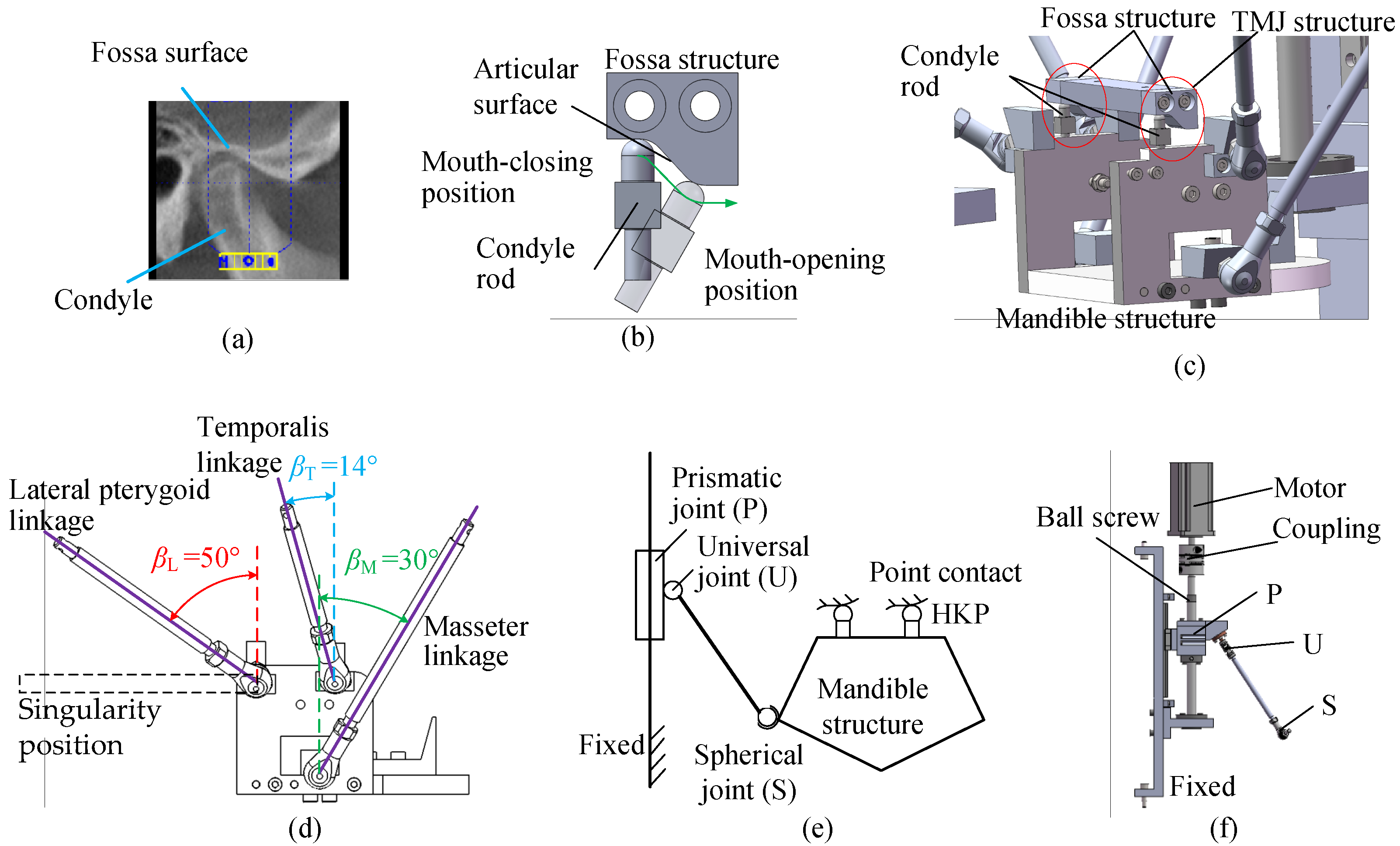
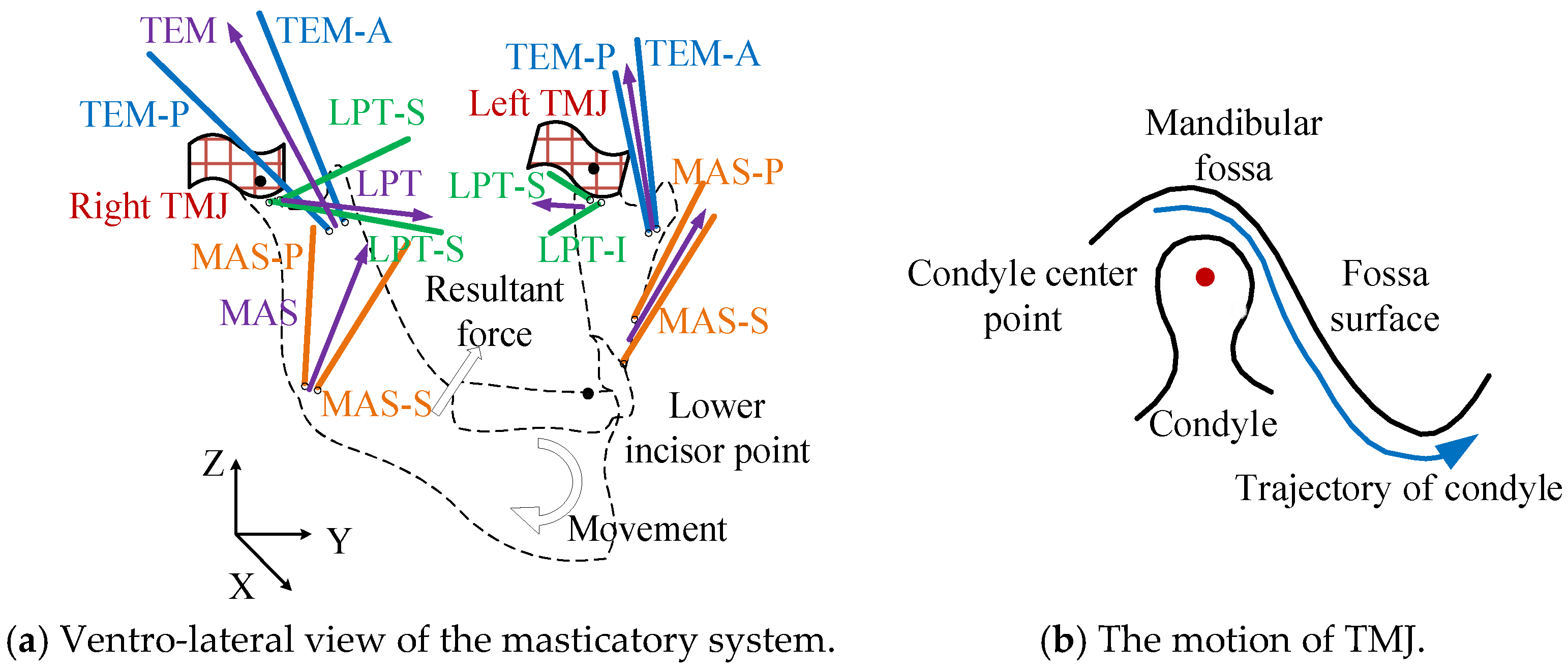
2.1. The Masticatory System
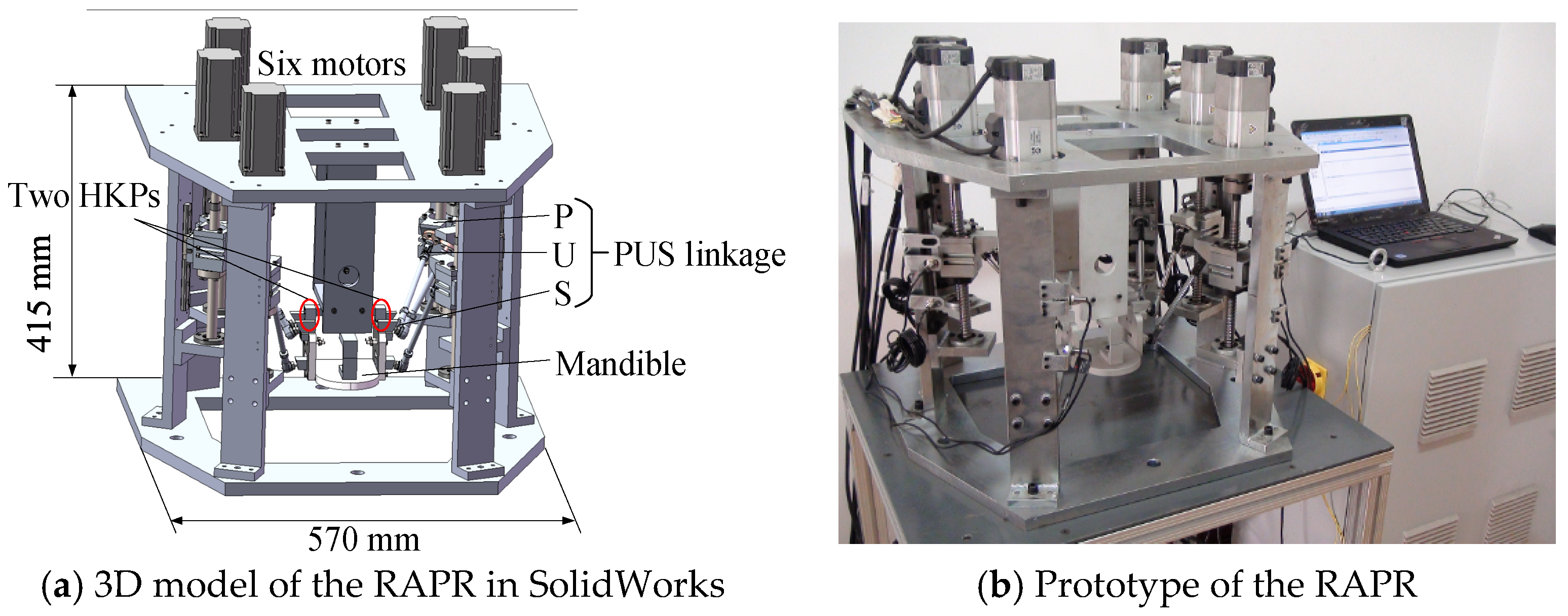
2.2. The Redundantly Actuated Chewing Robot
2.3. Reference Frames
3. Differential Kinematics
3.1. Inverse Kinematics
3.2. Velocity Analysis and Jacobian Matrix
4. Stiffness Analysis and Optimization of Driving Force
4.1. Stiffness Analysis
4.2. Optimization of Driving Force
5. Chewing Experiment
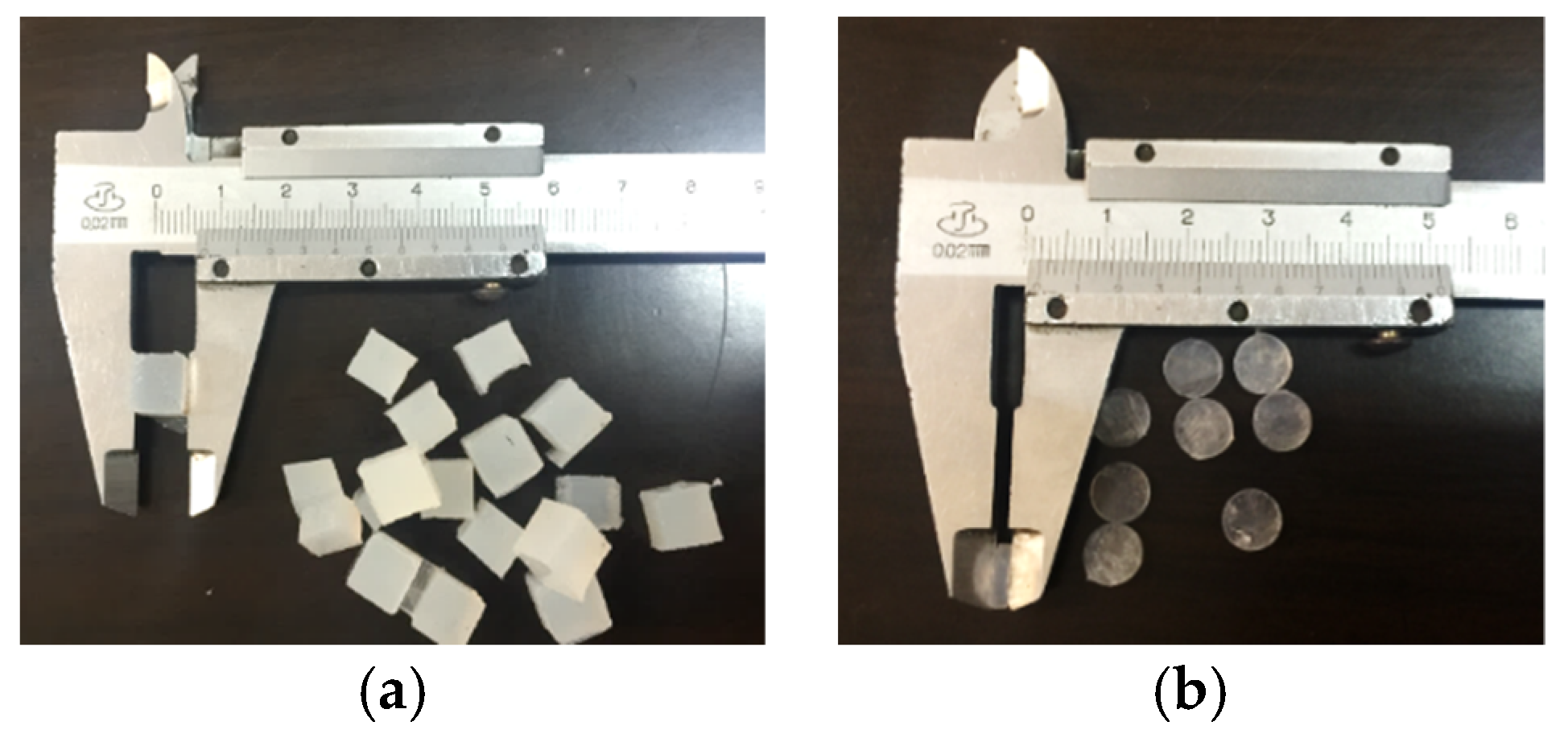
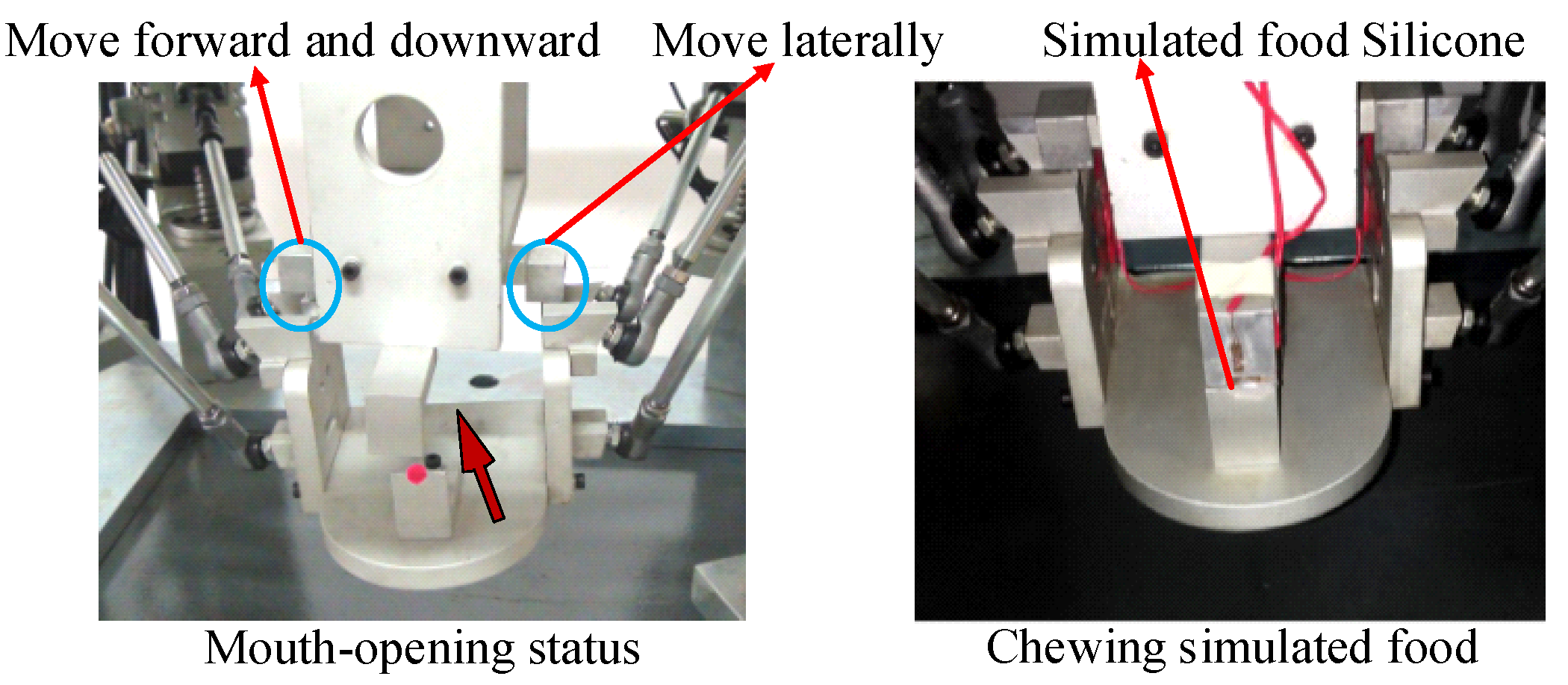
5.1. Measurement Methods for Chewing Simulated Food
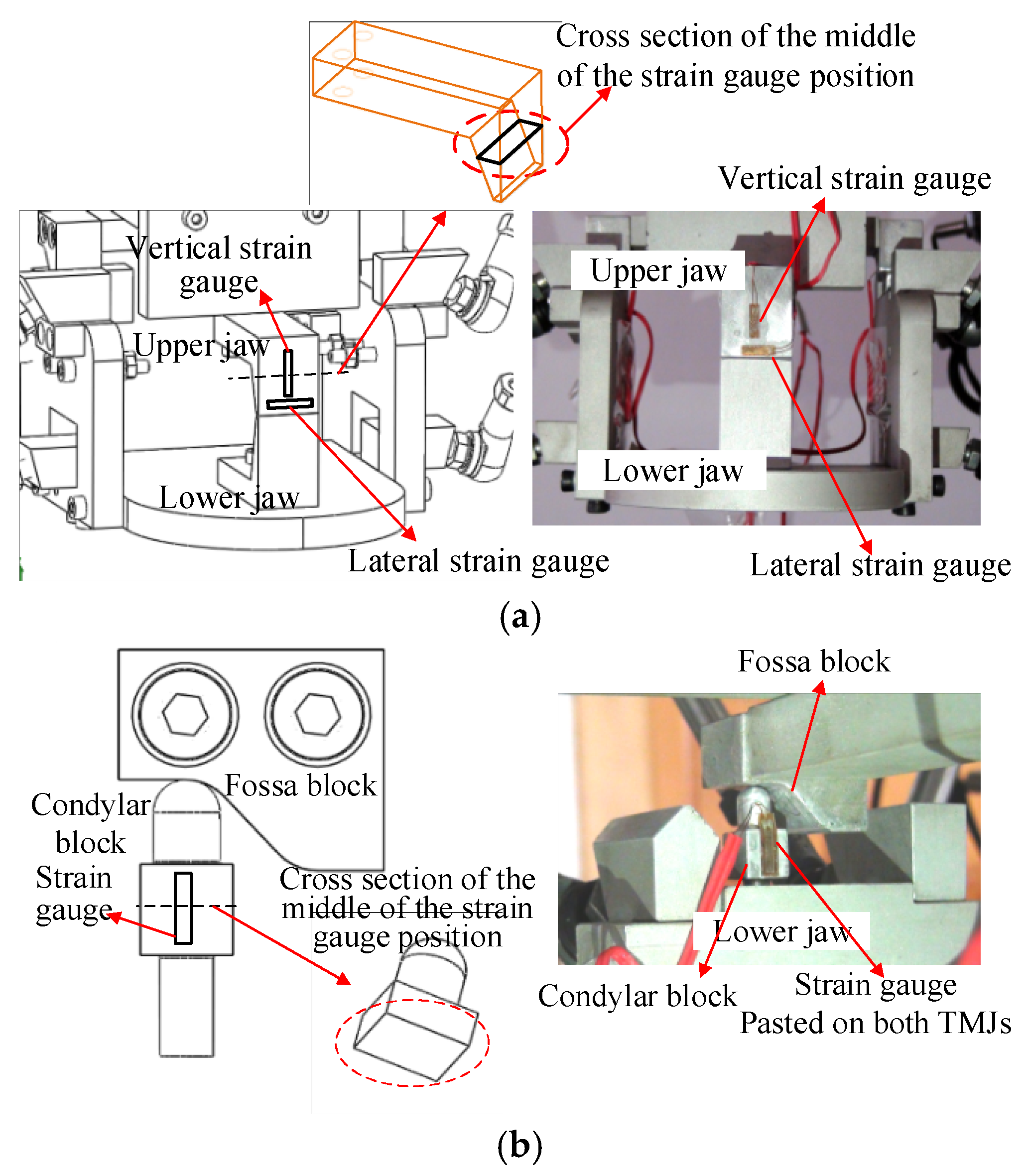
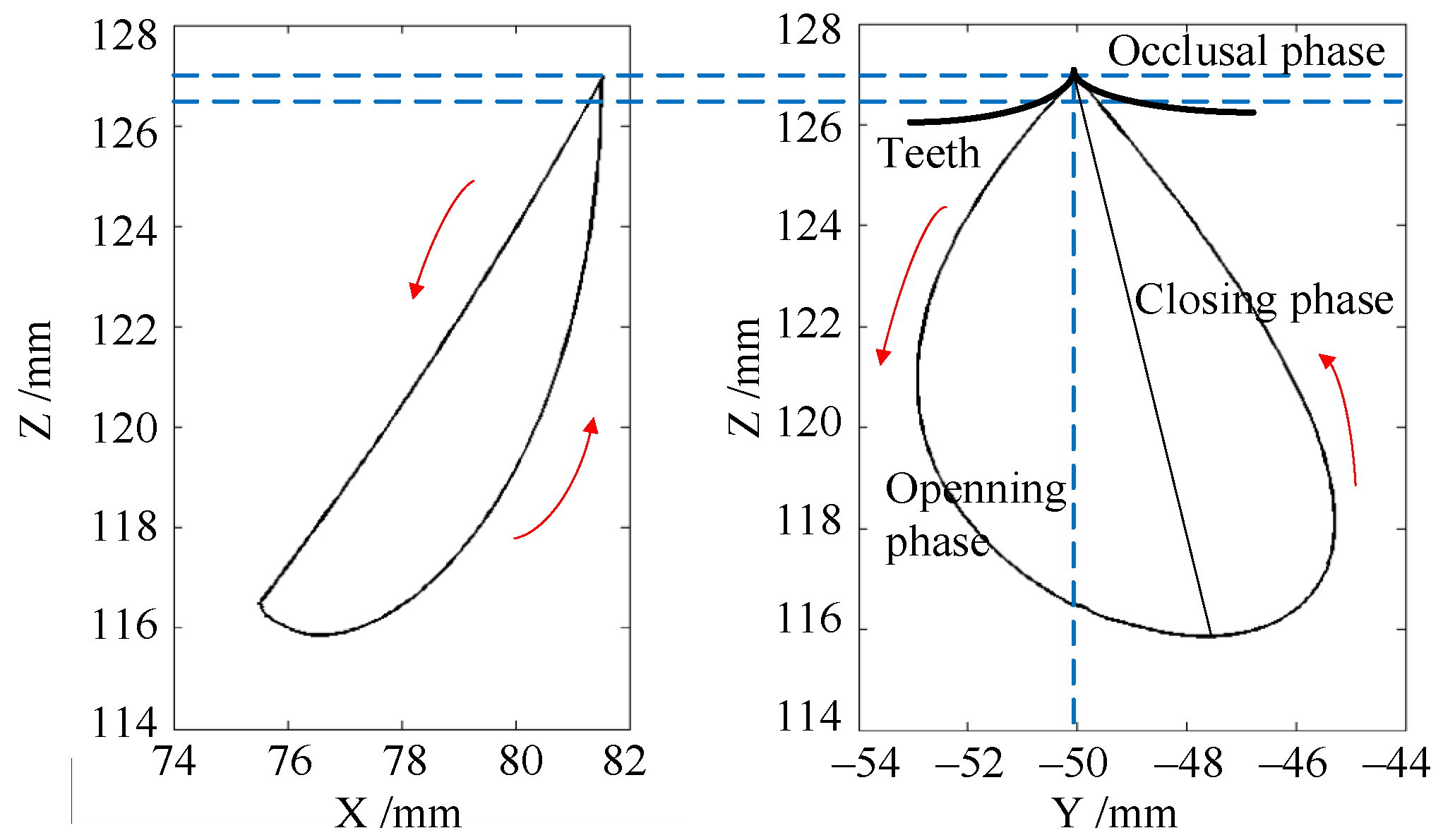
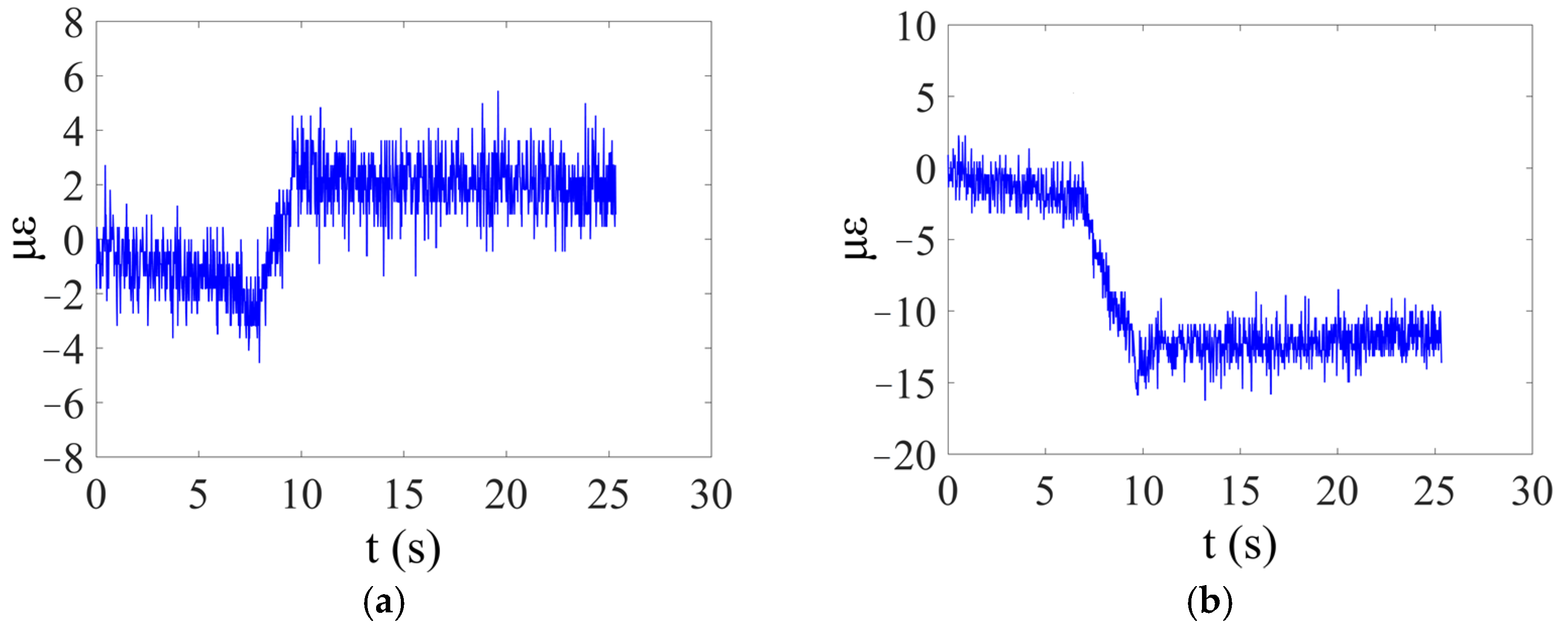
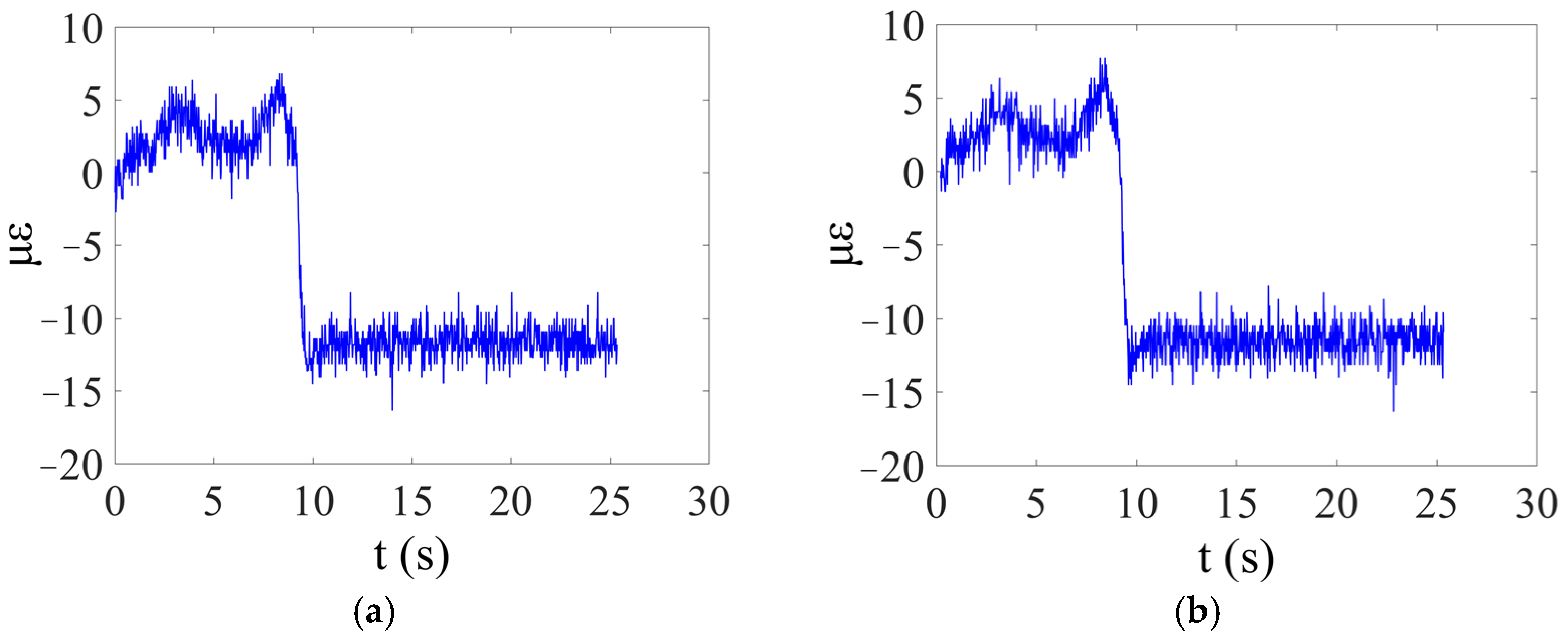
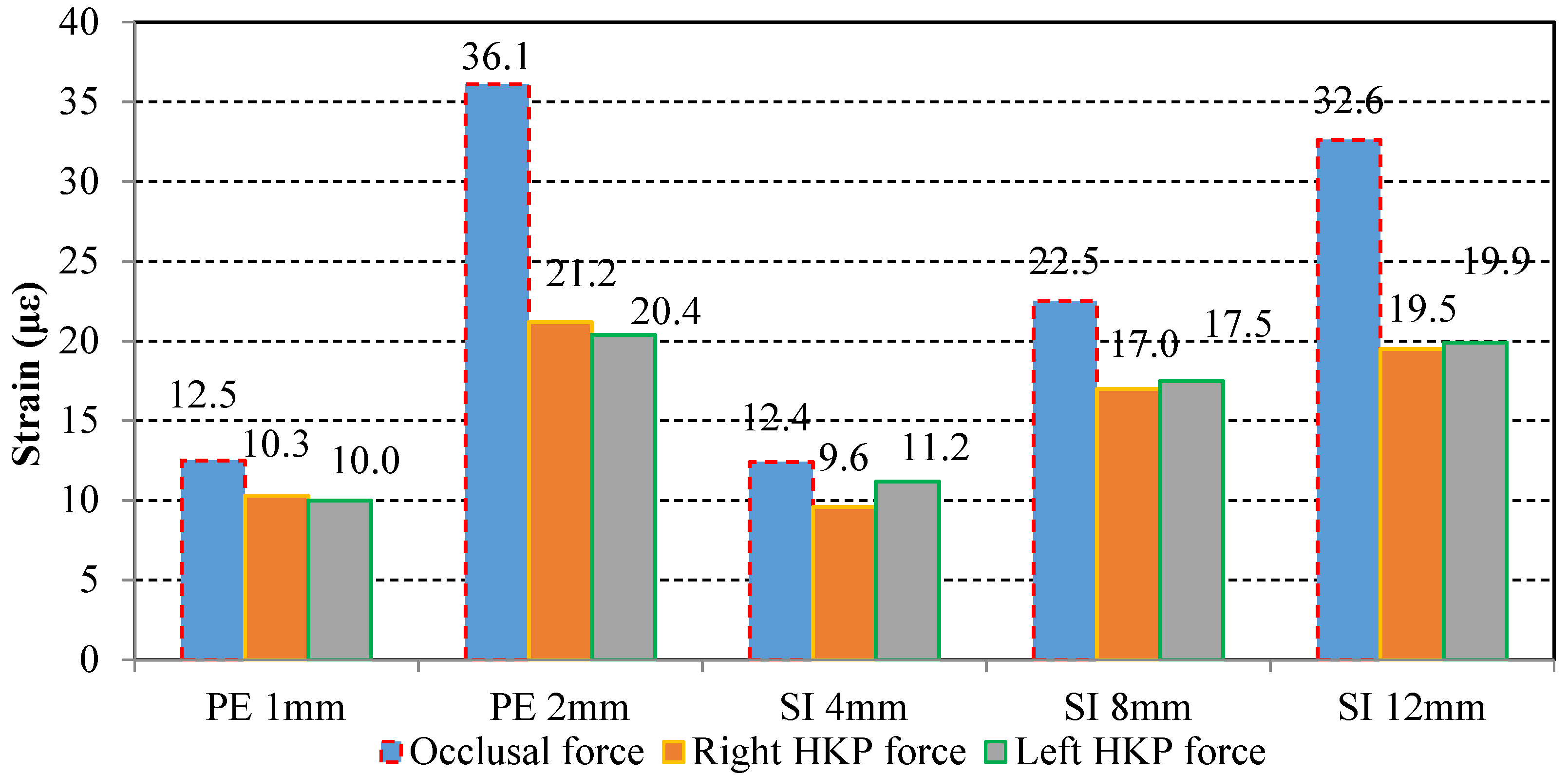
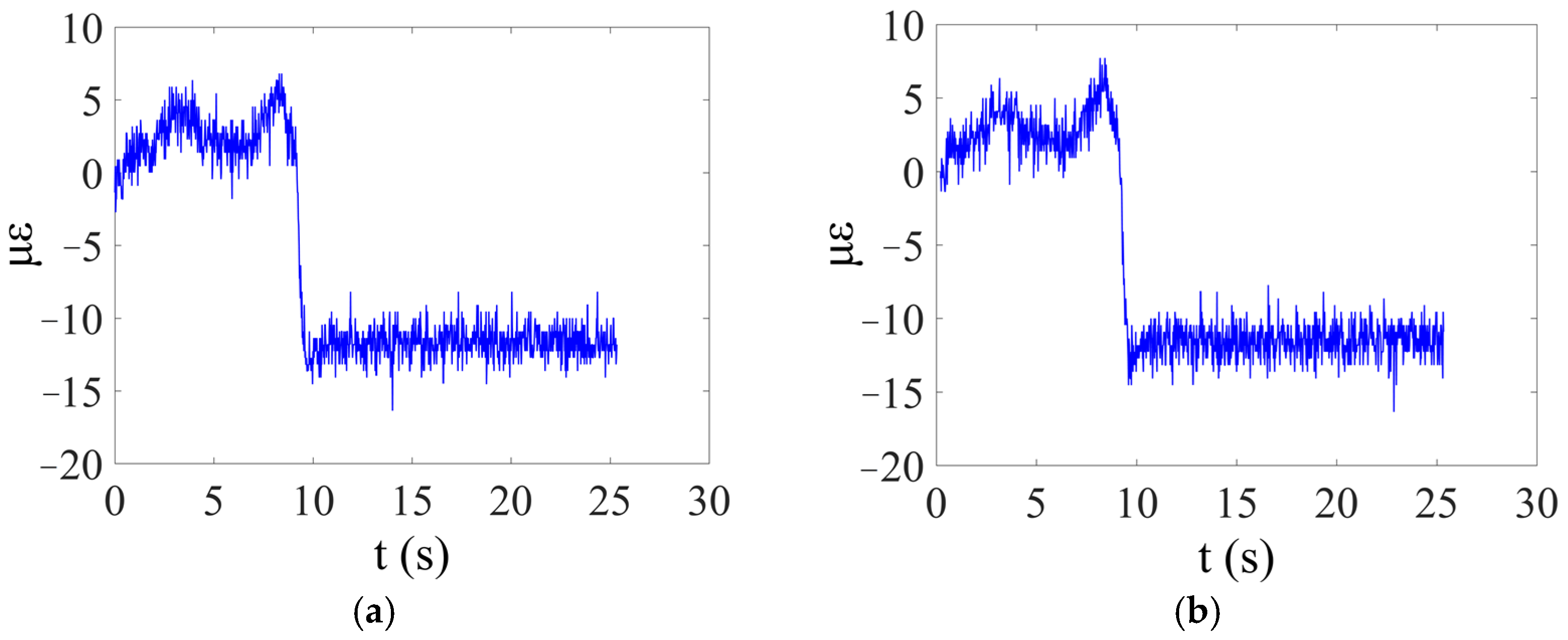
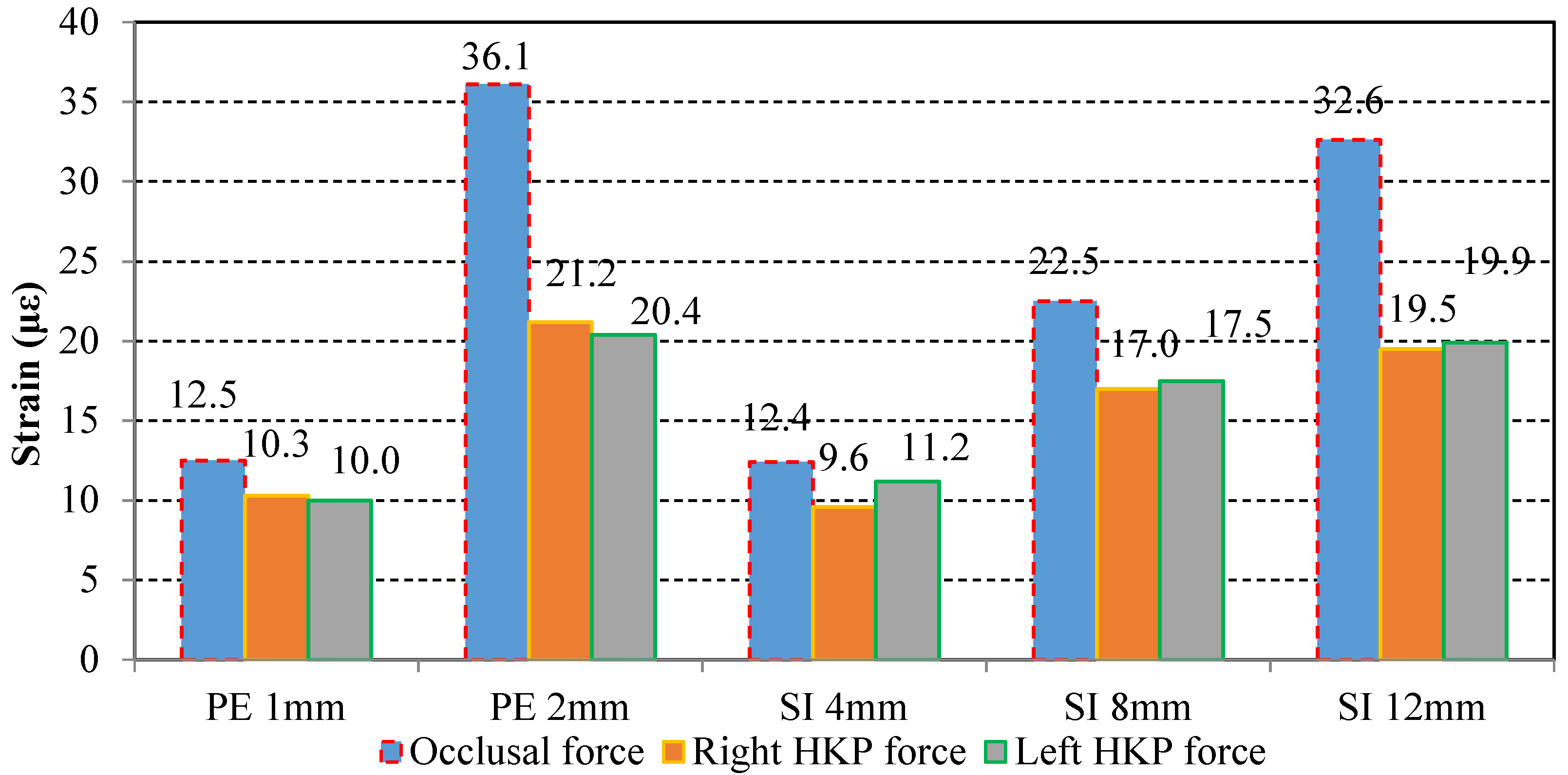
5.2. Experimental Results of Occlusal Force and TMJ Force
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Flores, E.; Fels, S.; Vatikiotis-Bateson, E. Chew on this: Design of a 6DOF anthropomorphic robotic jaw. In Proceedings of the 16th IEEE International Symposium on Robot and Human Interactive Communication, Jeju, Korea, 26–29 August 2007; pp. 648–653. [Google Scholar]
- Alemzadeh, K.; Jones, S.B.; Davies, M.; West, N. Development of a Chewing Robot with Built-in Humanoid Jaws to Simulate Mastication to Quantify Robotic Agents Release from Chewing Gums Compared to Human Participants. IEEE. Trans. Biomed. Eng. 2020, 68, 492–504. [Google Scholar] [CrossRef]
- Takanobu, H.; Maruyama, T.; Takanishi, A.; Ohtsuki, K. Mouth opening and closing training with 6-DOF parallel robot. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 1384–1389. [Google Scholar]
- Celebi, N.; Rohner, E.C.; Gateno, J.; Noble, P.C.; Ismaily, S.K.; Xia, J.J. Development of a Mandibular Motion Simulator for Total Joint Replacement. J. Oral Maxil. Surg. 2011, 69, 66–79. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wen, H.Y.; Cong MWang, G.F.; Qin, W.L.; Xu, W.L.; Zhang, Z.S. Dynamics and Optimized Torque Distribution Based Force/position Hybrid Control of a 4-DOF Redundantly Actuated Parallel Robot with Two Point-contact Constraints. Intern. J. Control Automat. Syst. 2019, 17, 1293–1303. [Google Scholar] [CrossRef]
- Naser, M.; Jaspreet, D.; Alexander, V.; John, B.; Xu, W.L. Optimizing the torque distribution of a redundantly actuated parallel robot to study the temporomandibular reaction forces during food chewing. J. Mech. Robot 2020, 12, 1–28. [Google Scholar]
- Kandasamy, S.; Greene, C.; Rinchuse, D.; Stockstill, J. TMD and Orthodontics; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Kishi, T.; Hashimoto, K.; Takanishi, A. Human Like Face and Head Mechanism. In Humanoid Robotics: A Reference; Goswami, A., Vadakkepat, P., Eds.; Springer: Dordrecht, The Netherlands, 2017. [Google Scholar]
- Cid, F.; Moreno, J.; Bustos, P.; Núñez, P. Muecas: A multi-sensor robotic head for affective human robot interaction and imitation. Sensors 2014, 14, 7711–7737. [Google Scholar] [CrossRef] [Green Version]
- Ding, H.; Esfahani, M.I.M.; Shen, Y.; Tan, H.; Zhang, C. Hybrid Humanoid Robotic Head Mechanism: Design, Modeling, and Experiments with Object Tracking. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020. [Google Scholar]
- Takanobu, H.; Takanishi, A.; Ozawa, D.; Ohtsuki, K. Integrated dental robot system for mouth opening and closing training. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 1428–1433. [Google Scholar]
- Xu, W.L.; Lewis, D.; Bronlund, J.E.; Morgenstern, M.P. Mechanism, design and motion control of a linkage chewing device for food evaluation. Mech. Mach. Theory 2008, 43, 376–389. [Google Scholar] [CrossRef]
- Xu, W.L.; Torrance, J.D.; Chen, B.Q.; Potgieter, J.; Bronlund, J.E. Kinematics and experiments of a life-sized masticatory robot for characterizing food texture. IEEE Trans. Ind. Electron. 2008, 55, 2121–2132. [Google Scholar] [CrossRef]
- Xu, W.L.; Pap, J.S.; Bronlund, J.E. Design of a biologically inspired parallel robot for foods chewing. IEEE Trans. Ind. Electron. 2008, 55, 832–841. [Google Scholar] [CrossRef]
- Raabe, D.; Harrison, A.; Ireland, A.; Alemzadeh, K.; Sandy, J.; Dogramadzi, S.; Melhuish, C.; Burgess, S. Improved single- and multi-contact life-time testing of dental restorative materials using key characteristics of the human masticatory system and a force/position-controlled robotic dental wear simulator. Bioinspir. Biomim. 2012, 7, 016002. [Google Scholar] [CrossRef]
- Papo, M.J.; Catledge, S.A.; Vohra, Y.K. Mechanical wear behavior of nanocrystalline and multilayer diamond coatings on temporomandibular joint implants. J. Mater. Sci. Mater. Med. 2004, 15, 773–777. [Google Scholar] [CrossRef]
- Mueller, A. Redundant Actuation of Parallel Manipulators. Parallel Manipulators, towards New Applications; I-Tech Education and Publishing: Vienna, Austria, 2008. [Google Scholar]
- Shang, W.; Cong, S. Dexterity and Adaptive Control of Planar Parallel Manipulators with and without Redundant Actuation. J. Comput. Nonlinear Dyn. 2015, 10, 011002. [Google Scholar] [CrossRef]
- Ebrahimi, I.; Carretero, J.A.; Boudreau, R. 3-PRRR redundant planar parallel manipulator: Inverse displacement, workspace and singularity analyses. Mech. Mach. Theory 2007, 42, 1007–1016. [Google Scholar] [CrossRef]
- Lee, G.; Park, S.; Lee, D.; Park, F.C.; Jeong, J.I. Minimizing Energy Consumption of Parallel Mechanisms via Redundant Actuation. IEEE/ASME Trans. Mechatron. 2015, 20, 2805–2812. [Google Scholar] [CrossRef]
- Hufnagel, T.; Mueller, A. A projection method for the elimination of contradicting decentralized control forces in redundantly actuated PKM. IEEE Trans. Robot. 2012, 28, 723–728. [Google Scholar] [CrossRef]
- Shang, W.; Cong, S.; Ge, Y. Coordination motion control in the task space for parallel manipulators with actuation redundancy. IEEE Trans. Autom. Sci. Eng. 2013, 10, 665–673. [Google Scholar] [CrossRef]
- Liu, G.F.; Cheng, H.; Xiong, Z.H.; Wu, X.Z. Distribution of singularity and optimal control of redundant parallel manipulators. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; pp. 177–182. [Google Scholar]
- Zhu, Z.; Dou, R. Optimum design of 2-DOF parallel manipulators with actuation redundancy. Mechatronics 2009, 19, 761–766. [Google Scholar] [CrossRef]
- Marquet, F.; Krut, S.; Company, O.; Pierrot, F. ARCHI: A redundant mechanism for machining with unlimited rotation capacities. In Proceedings of the 2001 IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; pp. 683–689. [Google Scholar]
- Wu, J.; Wang, J.; Wang, L.; Li, T.; You, Z. Study on the stiffness of a 5-DOF hybrid machine tool with actuation redundancy. Mech. Mach. Theory 2009, 44, 289–305. [Google Scholar] [CrossRef]
- Wang, L.; Wu, J.; Wang, J.; You, Z. An experimental study of a redundantly actuated parallel manipulator for a 5-DOF hybrid machine tool. IEEE ASME Trans. Mechatron. 2009, 14, 72–81. [Google Scholar] [CrossRef]
- Kim, J.; Park, F.C.; Sun, J.R.; Kim, J. Design and analysis of a redundantly actuated parallel mechanism for rapid machining. IEEE Trans. Robot. Autom. 2001, 17, 423–434. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Y.; Gao, F. Dynamic performance comparison of the 8PSS redundant parallel manipulator and its non-redundant counterpart-the 6PSS parallel manipulator. Mech. Mach. Theory 2009, 44, 991–1008. [Google Scholar] [CrossRef]
- Xu, M.; Rong, C.; He, L. Design and Modeling of a Bio-Inspired Flexible Joint Actuator. Actuators 2021, 10, 95. [Google Scholar] [CrossRef]
- Wang, W.; Hou, Z.G.; Cheng, L.; Tong, L.; Peng, L.; Peng, L.; Tan, M. Toward patients’ motion intention recognition: Dynamics modeling and identification of iLeg—An LLRR under motion constraints. IEEE Trans. Syst. Man Cybern. Syst. 2017, 46, 980–992. [Google Scholar] [CrossRef]
- Kim, J.; Yang, J.; Yang, S.T.; Oh, Y.; Lee, G. Energy-Efficient Hip Joint Offsets in Humanoid Robot via Taguchi Method and Bio-inspired Analysis. Appl. Sci. 2020, 10, 7287. [Google Scholar] [CrossRef]
- Takanobu, H.; Takanishi, A.; Kato, I. Design of a mastication robot using a human skull model. In Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’93), Yokohama, Japan, 26–30 July 1993; pp. 203–208. [Google Scholar]
- Vilimek, M.; Goldmann, T. Computation of forces acting in temporomandibular joint and masticatory muscles during mastication. Comput. Method. Biomech. Biomed. Eng. 2011, 14, 267–268. [Google Scholar] [CrossRef]
- Tanaka, E.; Koolstra, J.H. Biomechanics of the temporomandibular joint. J. Dent. Res. 2008, 87, 989–992. [Google Scholar] [CrossRef] [PubMed]
- Mercuri, L.G. Temporomandibular Joint Total Joint Replacement- TMJ TJR; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Iwasaki, L.R.; Baird, B.W.; McCall, W.D., Jr.; Nickel, J.C. Muscle and temporomandibular joint forces associated with chincup loading predicted by numerical modeling. Am. J. Orthod. Dentofacial Orthop. 2003, 124, 530–540. [Google Scholar] [CrossRef]
- Nickel, J.C.; Iwasaki, L.R.; Walker, R.D.; Mclachlan, K.R.; McCall, W.D., Jr. Human masticatory muscle forces during static biting. J. Dent. Res. 2003, 82, 212–217. [Google Scholar] [CrossRef]
- Koolstra, J.H. Dynamics of the human masticatory system. Crit. Rev. Oral Biol. Med. 2002, 13, 366–376. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koolstra, J.H.; Eijden, T.M.G.J.V. Prediction of volumetric strain in the human temporomandibular joint cartilage during jaw movement. J. Anat. 2006, 209, 369–380. [Google Scholar] [CrossRef] [PubMed]
- Park, J.T.; Lee, J.G.; Won, S.Y.; Lee, S.H.; Cha, J.Y.; Kim, H.J. Realization of masticatory movement by 3-dimensional simulation of the temporomandibular joint and the masticatory muscles. J. Craniofacial Surg. 2013, 24, 347–351. [Google Scholar] [CrossRef]
- Iwasaki, L.R.; Petsche, P.E.; McCall, W.D., Jr.; Marx, D.; Nickel, J.C. Neuromuscular objectives of the human masticatory apparatus during static biting. Arch. Oral Biol. 2003, 48, 767–777. [Google Scholar] [CrossRef]
- May, B.; Saha, S.; Saltzman, M. A three-dimensional mathematical model of temporomandibular joint loading. Clin. Biomech. 2001, 16, 489–495. [Google Scholar] [CrossRef]
- Koolstra, J.H.; Eijden, T.M.G.J.V. Dynamics of the human masticatory muscles during a jaw open-close movement. J. Biomech. 1997, 30, 883–889. [Google Scholar] [CrossRef]
- Koolstra, J.H.; Eijden, T.M.G.J.V. A method to predict muscle control in the kinematically and mechanically indeterminate human masticatory system. J. Biomech. 2001, 34, 1179–1188. [Google Scholar] [CrossRef]
- Wen, H.; Xu, P.; Cong, M. Kinematic Model and Analysis of an Actuation Redundant Parallel Robot With Higher Kinematic Pairs for Jaw Movement. IEEE Trans. Ind. Electron. 2014, 62, 1590–1598. [Google Scholar] [CrossRef]
- Merlet, J.P. Jacobian, manipulability, condition number and accuracy of parallel robots. J. Mech. Des. 2005, 128, 199–206. [Google Scholar] [CrossRef]
- Pulloquinga, J.L.; Escarabajal, R.J.; Ferrándiz, J.; Vallés, M.; Mata, V.; Urízar, M. Vision-Based Hybrid Controller to Release a 4-DOF Parallel Robot from a Type II Singularity. Sensors 2021, 21, 4080. [Google Scholar] [CrossRef]
- Ferrario, V.F.; Sforza, C.; Zanotti, G.; Tartaglia, G.M. Maximal biteforces in healthy young adults are predicted by surface electromyography. J. Dent. 2004, 32, 451–457. [Google Scholar] [CrossRef]
- Okiyama, S.; Ikebe, K.; Nokubi, T. Association between masticatory performance and maximal occlusal force in young men. J. Oral Rehabil. 2003, 30, 278–282. [Google Scholar] [CrossRef]
- Ferrario, V.F.; Sforza, C.; Serrao, G.; Dellavia, C.; Tartaglia, G.M. Single tooth bite forces in healthy young adults. J. Oral Rehabil. 2004, 31, 18–22. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
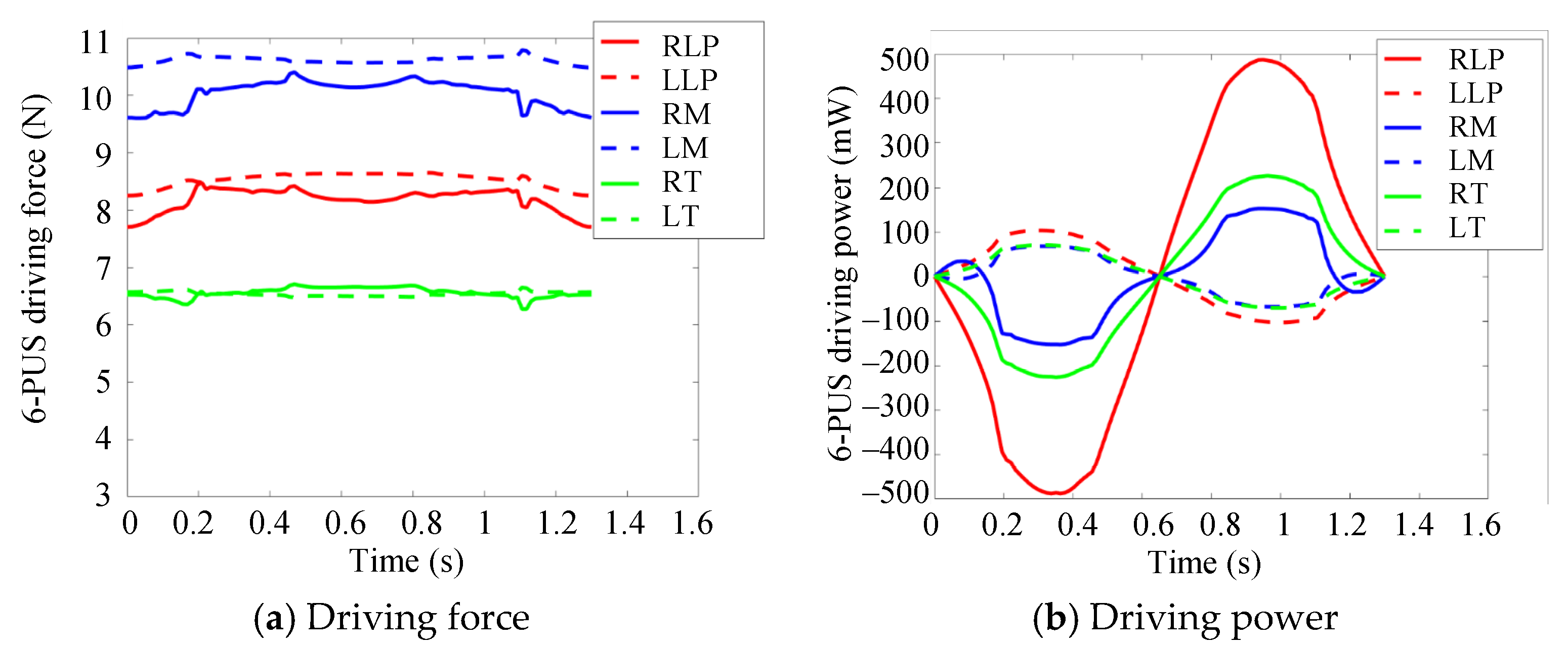
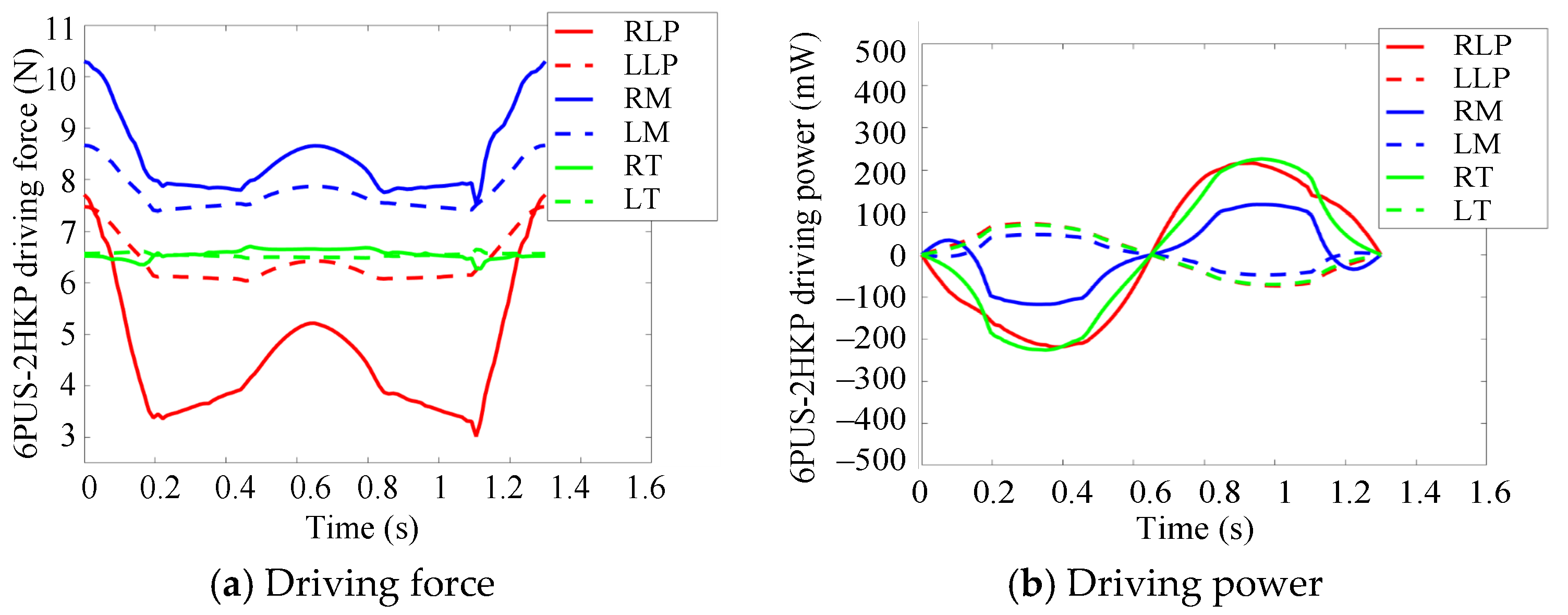
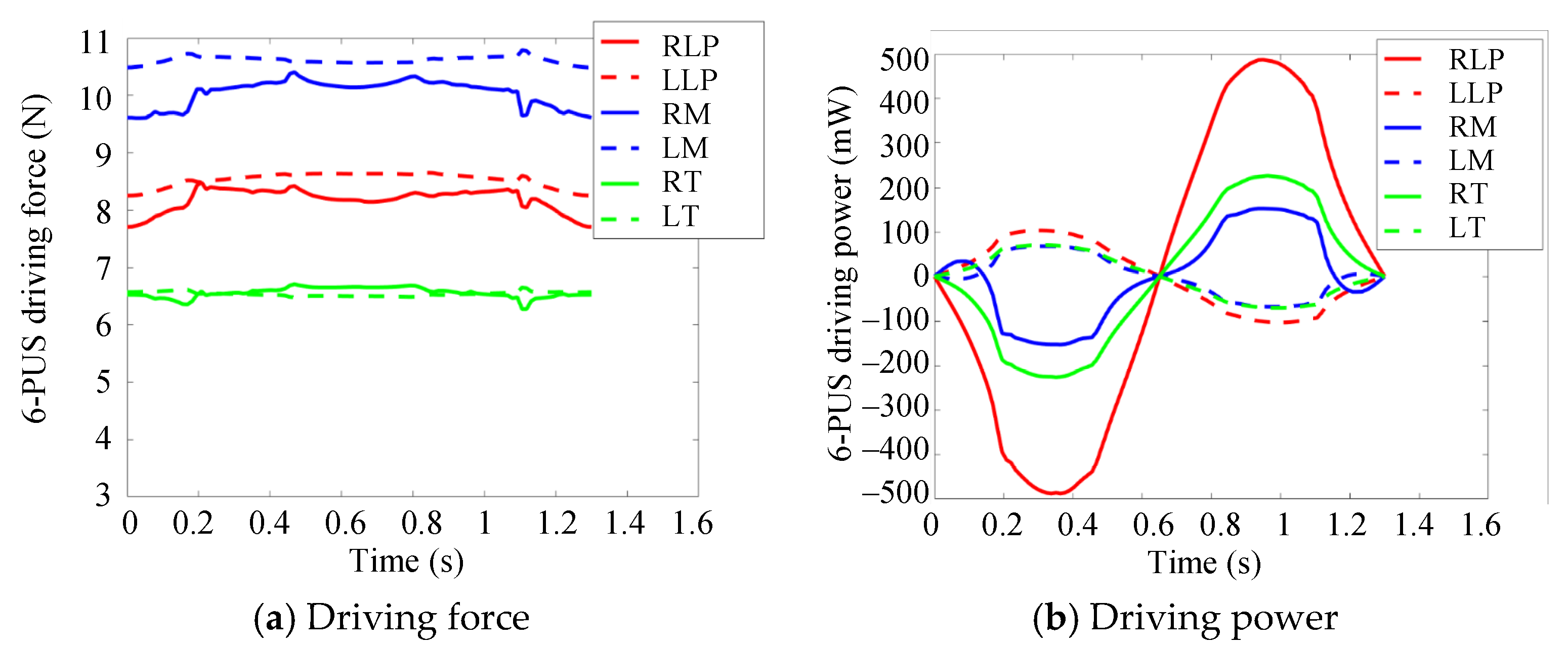
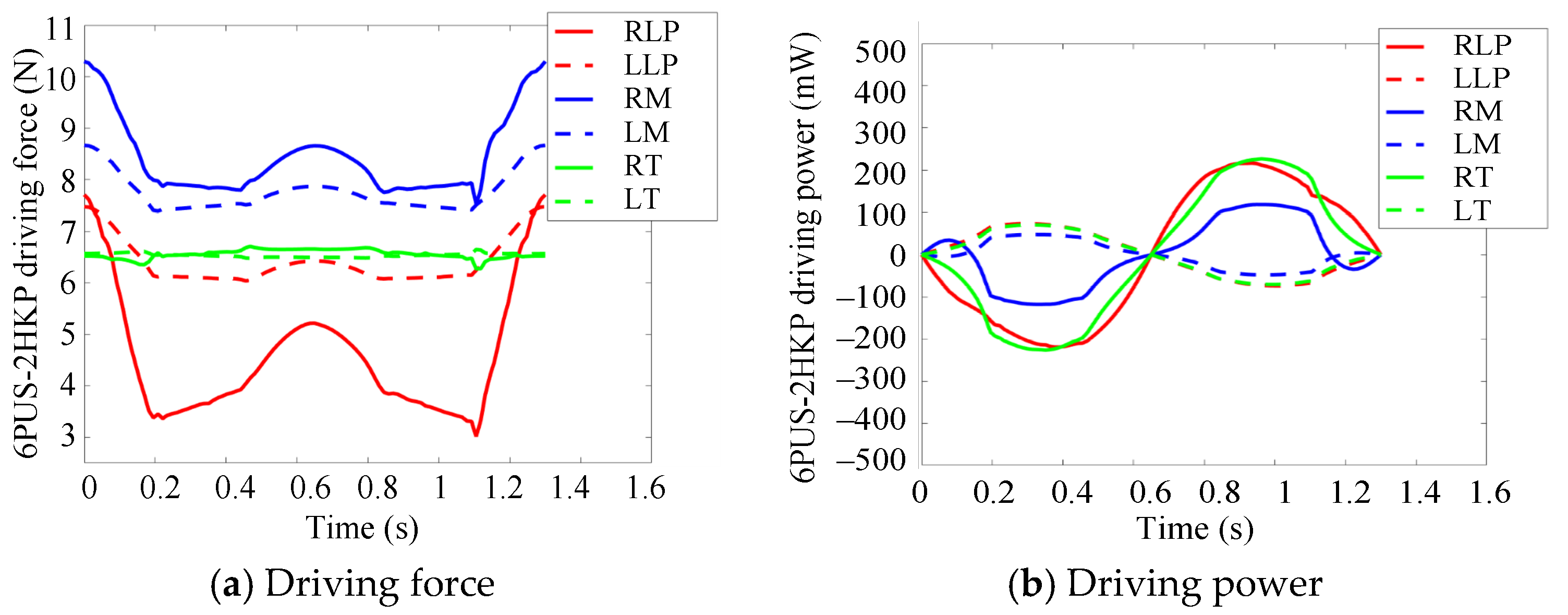
| Mechanism | Parameters | RLP | LLP | RM | LM | RT | LT |
|---|---|---|---|---|---|---|---|
| 6-PUS | Fmin (N) | 7.71 | 8.25 | 9.60 | 10.49 | 6.27 | 6.48 |
| Fmax (N) | 8.48 | 8.65 | 10.41 | 10.78 | 6.71 | 6.65 | |
| Fmean (N) | 8.18 | 8.53 | 10.04 | 10.61 | 6.56 | 6.54 | |
| Pmax (mW) | 487.4 | 103.3 | 152.9 | 68.2 | 226.3 | 70.7 | |
| PSD | 340.3 | 70.7 | 100.0 | 44.8 | 154.4 | 48.3 | |
| 6PUS-2HKP | Fmin (N) | 3.36 | 6.04 | 7.53 | 7.39 | 6.25 | 6.46 |
| Fmax (N) | 7.71 | 7.47 | 10.26 | 8.67 | 6.68 | 6.63 | |
| Fmean (N) | 4.62 | 6.42 | 8.45 | 7.76 | 6.55 | 6.53 | |
| Pmax (mW) | 216.3 | 73.9 | 117.9 | 47.8 | 224.4 | 70.6 | |
| PSD | 157.9 | 50.8 | 77.7 | 31.5 | 154.1 | 48.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, H.; Cong, M.; Zhang, Z.; Wang, G.; Zhuang, Y. A Redundantly Actuated Chewing Robot Based on Human Musculoskeletal Biomechanics: Differential Kinematics, Stiffness Analysis, Driving Force Optimization and Experiment. Machines 2021, 9, 171. https://doi.org/10.3390/machines9080171
Wen H, Cong M, Zhang Z, Wang G, Zhuang Y. A Redundantly Actuated Chewing Robot Based on Human Musculoskeletal Biomechanics: Differential Kinematics, Stiffness Analysis, Driving Force Optimization and Experiment. Machines. 2021; 9(8):171. https://doi.org/10.3390/machines9080171
Chicago/Turabian StyleWen, Haiying, Ming Cong, Zhisheng Zhang, Guifei Wang, and Yan Zhuang. 2021. "A Redundantly Actuated Chewing Robot Based on Human Musculoskeletal Biomechanics: Differential Kinematics, Stiffness Analysis, Driving Force Optimization and Experiment" Machines 9, no. 8: 171. https://doi.org/10.3390/machines9080171
APA StyleWen, H., Cong, M., Zhang, Z., Wang, G., & Zhuang, Y. (2021). A Redundantly Actuated Chewing Robot Based on Human Musculoskeletal Biomechanics: Differential Kinematics, Stiffness Analysis, Driving Force Optimization and Experiment. Machines, 9(8), 171. https://doi.org/10.3390/machines9080171