
An Investigation on the Grasping Position Optimization-Based Control for Industrial Soft Robot Manipulator


Abstract
:1. Introduction
2. Modeling
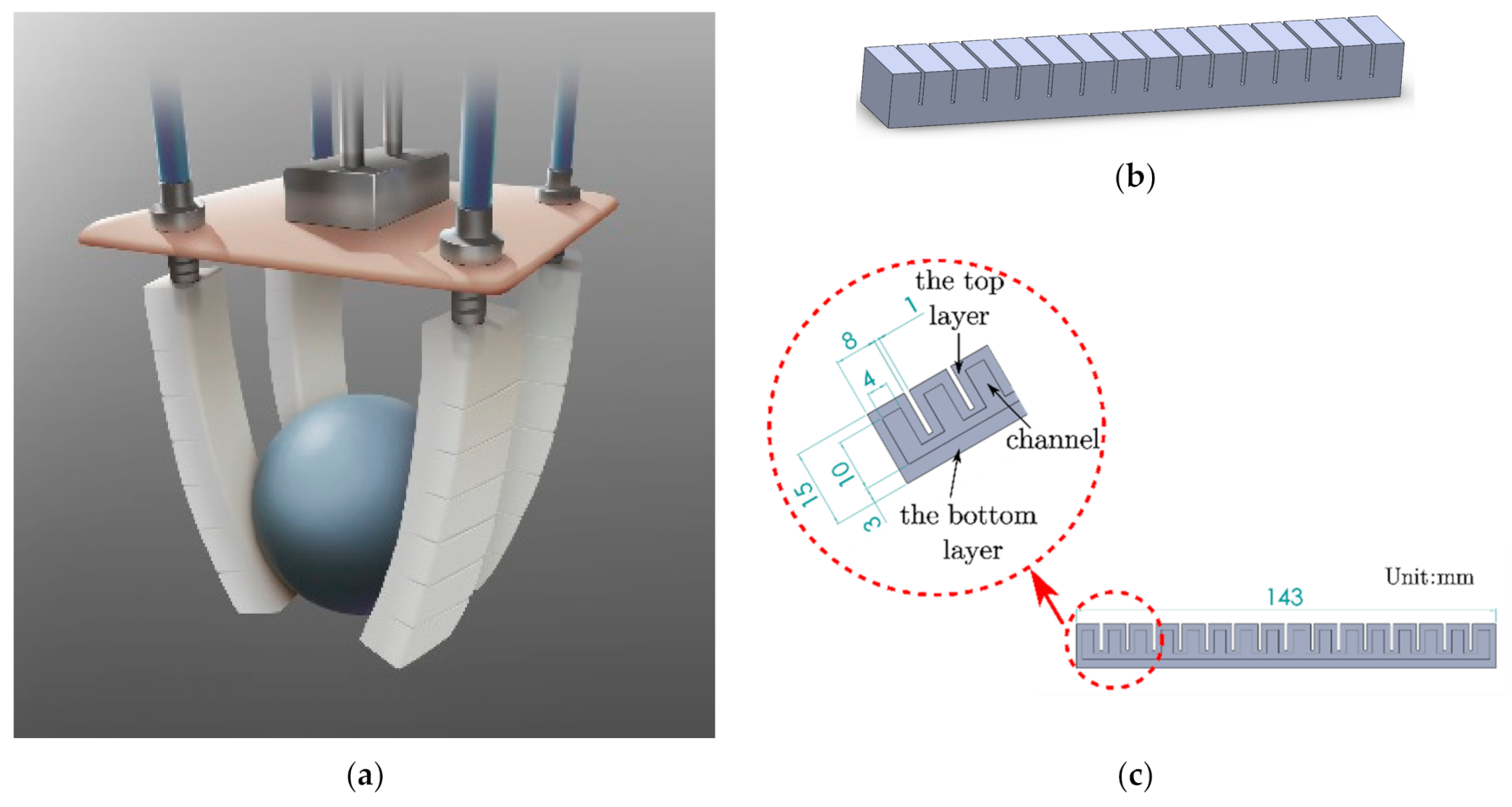
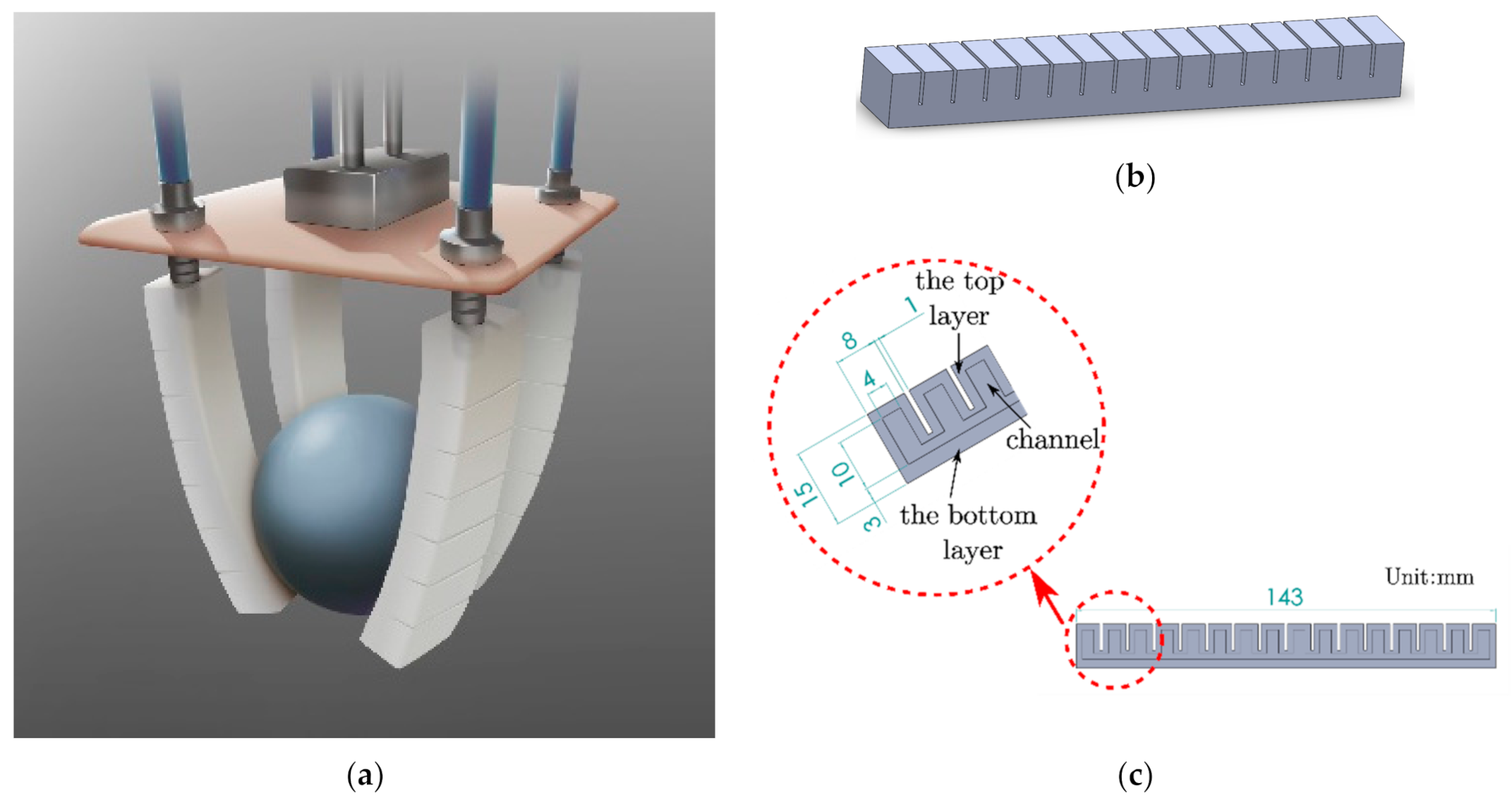
2.1. Design
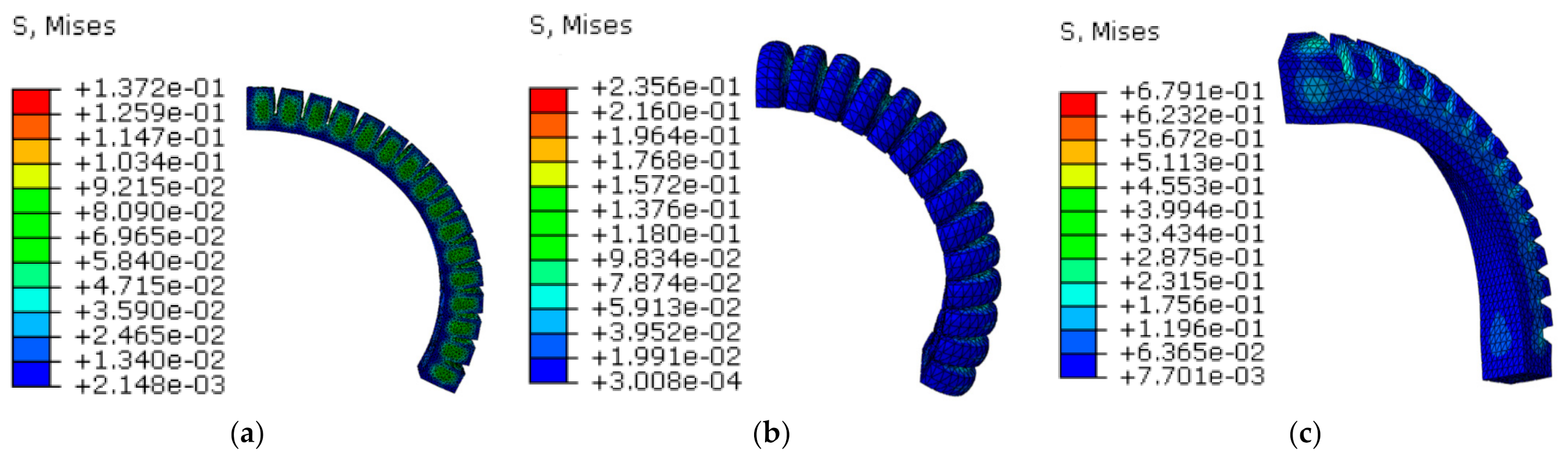
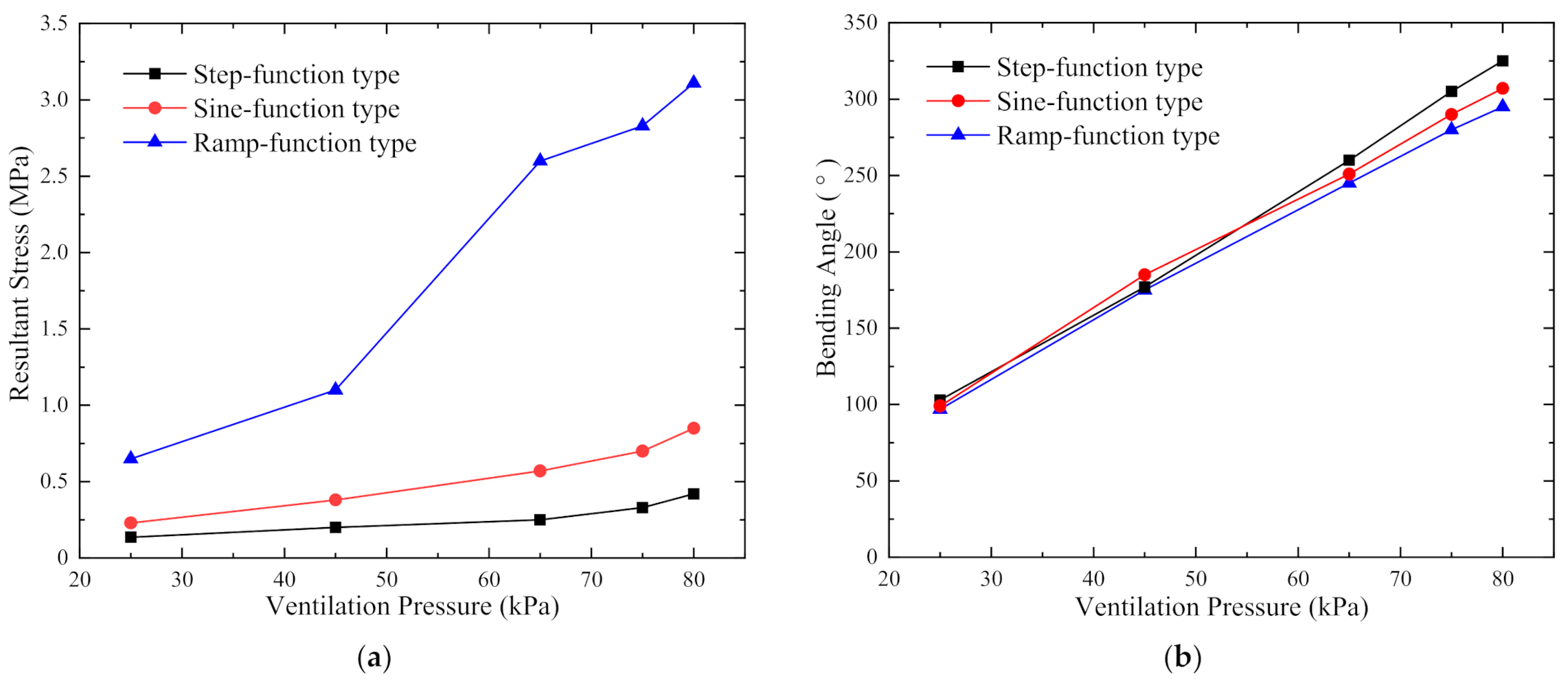
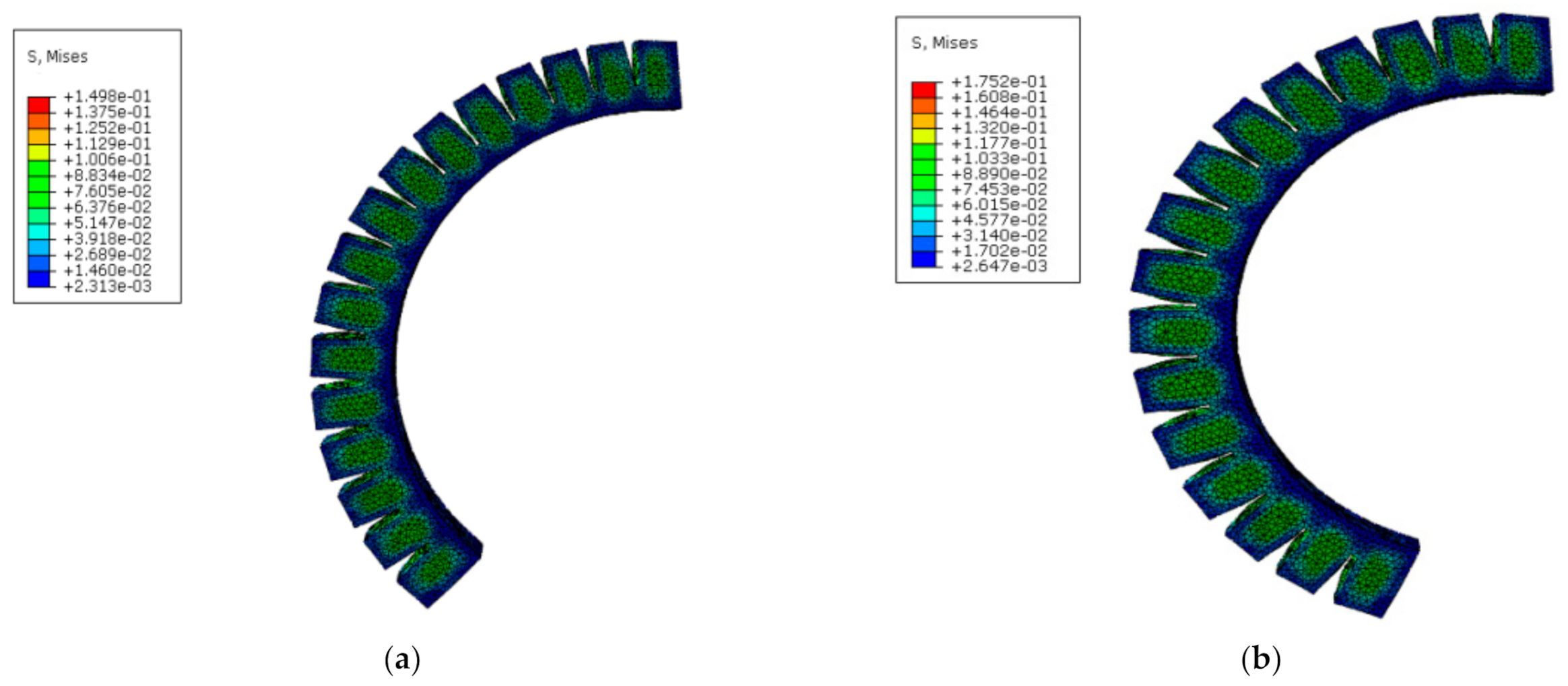
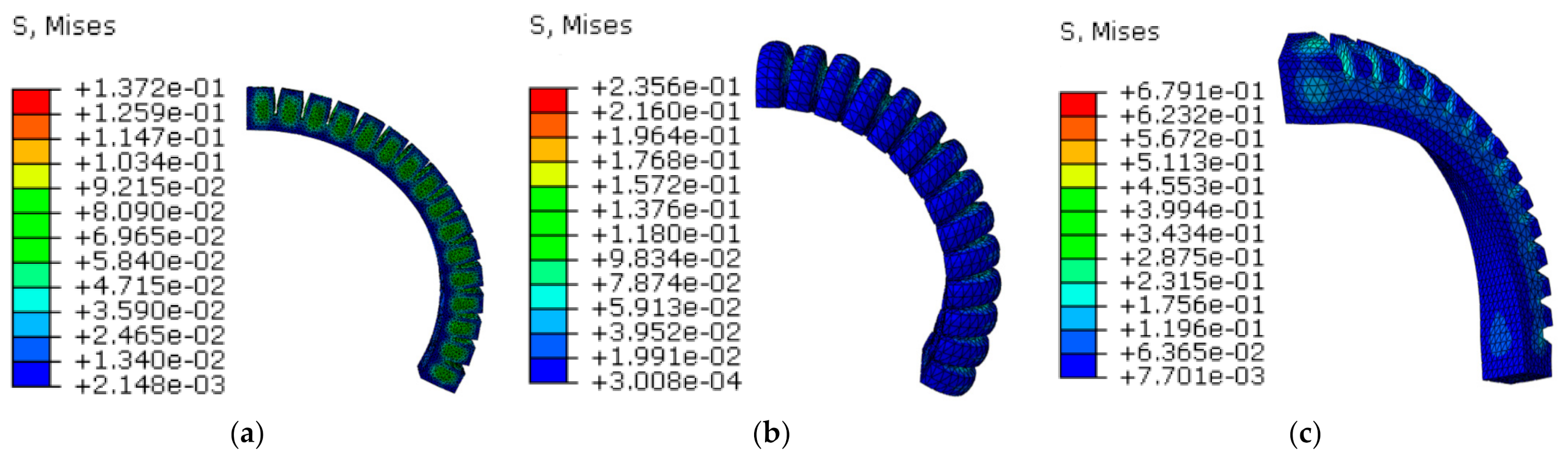
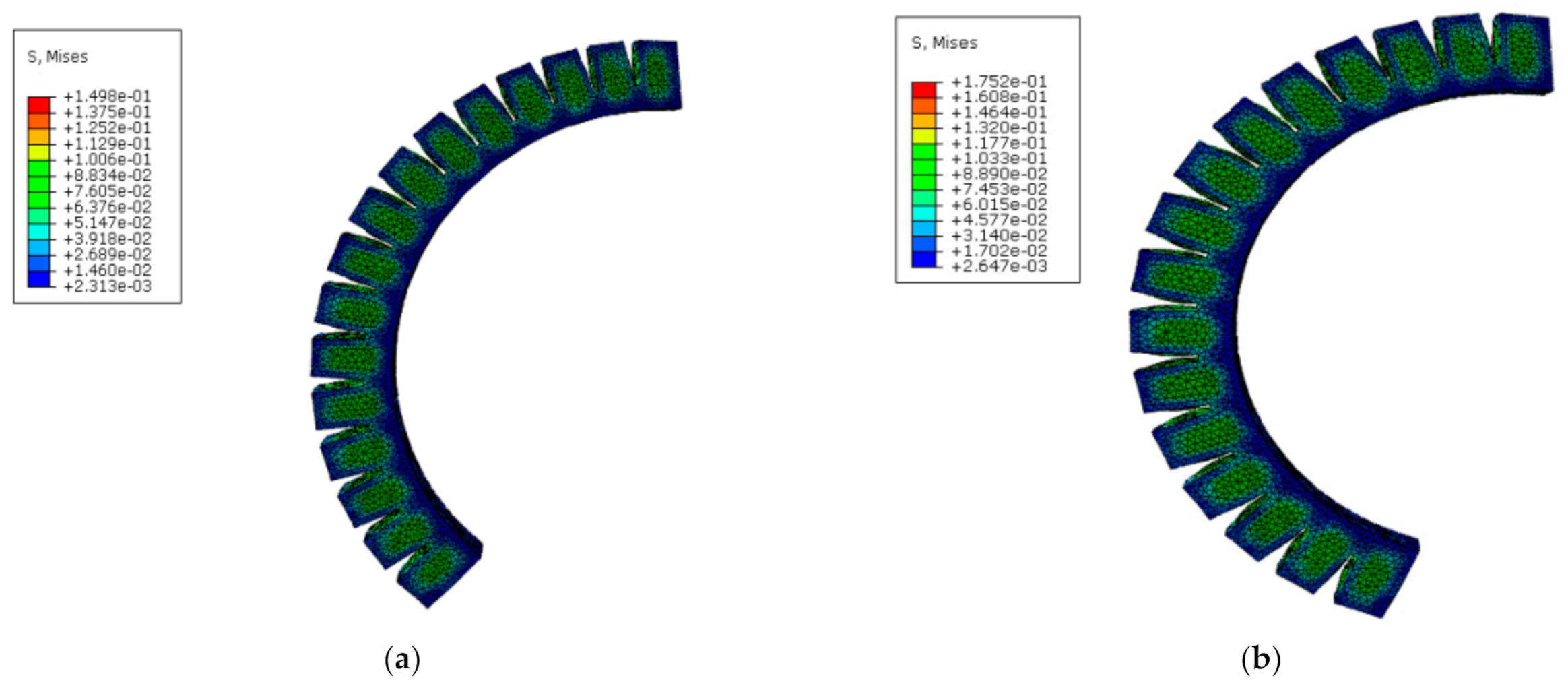
2.2. Simulation
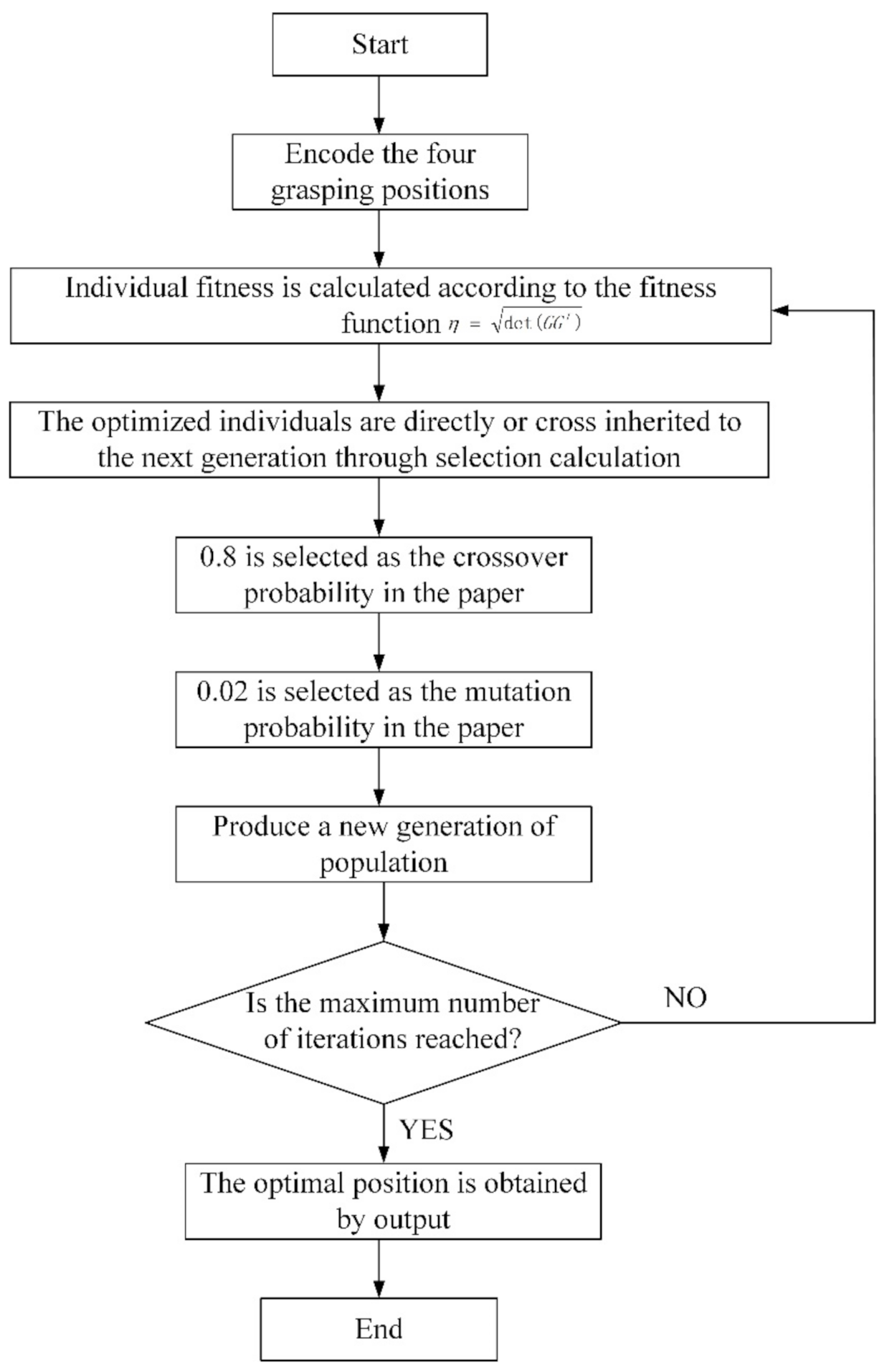
2.3. Study on the Soft Manipulator Optimal Grasping Position
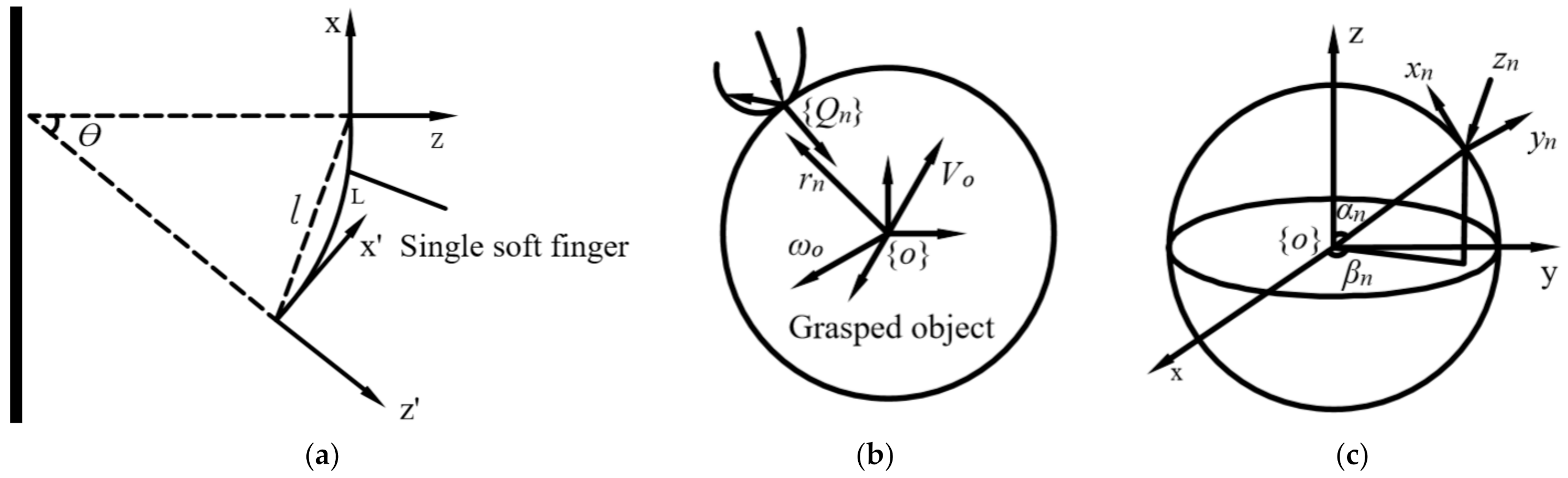
2.3.1. Kinematics Modeling of Soft Manipulator
2.3.2. Mechanical Modeling of Grasping Object
2.3.3. Grasping Position Modeling
2.3.4. The Results of Solution
3. Experimental Setup
3.1. Fabrication Process
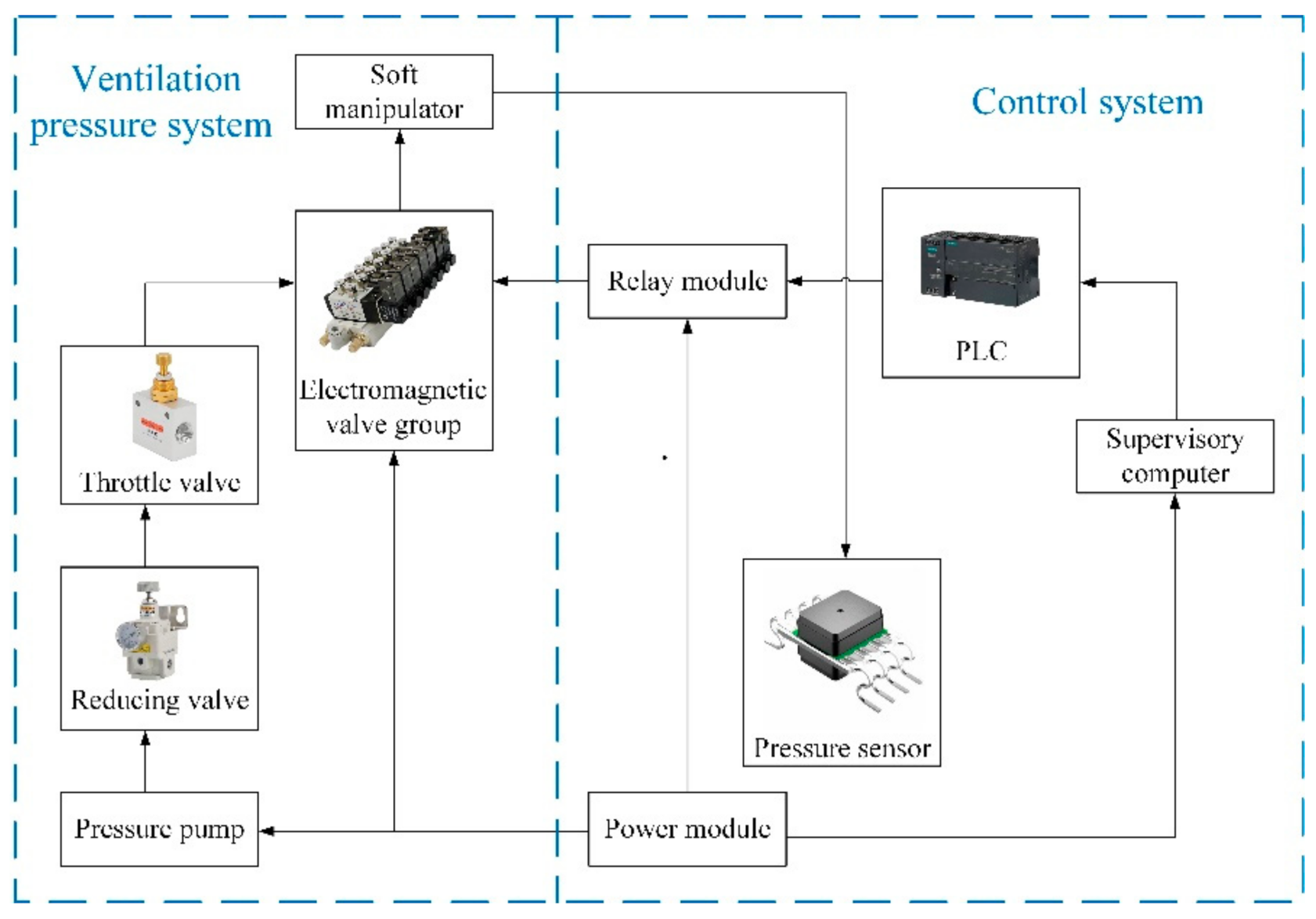
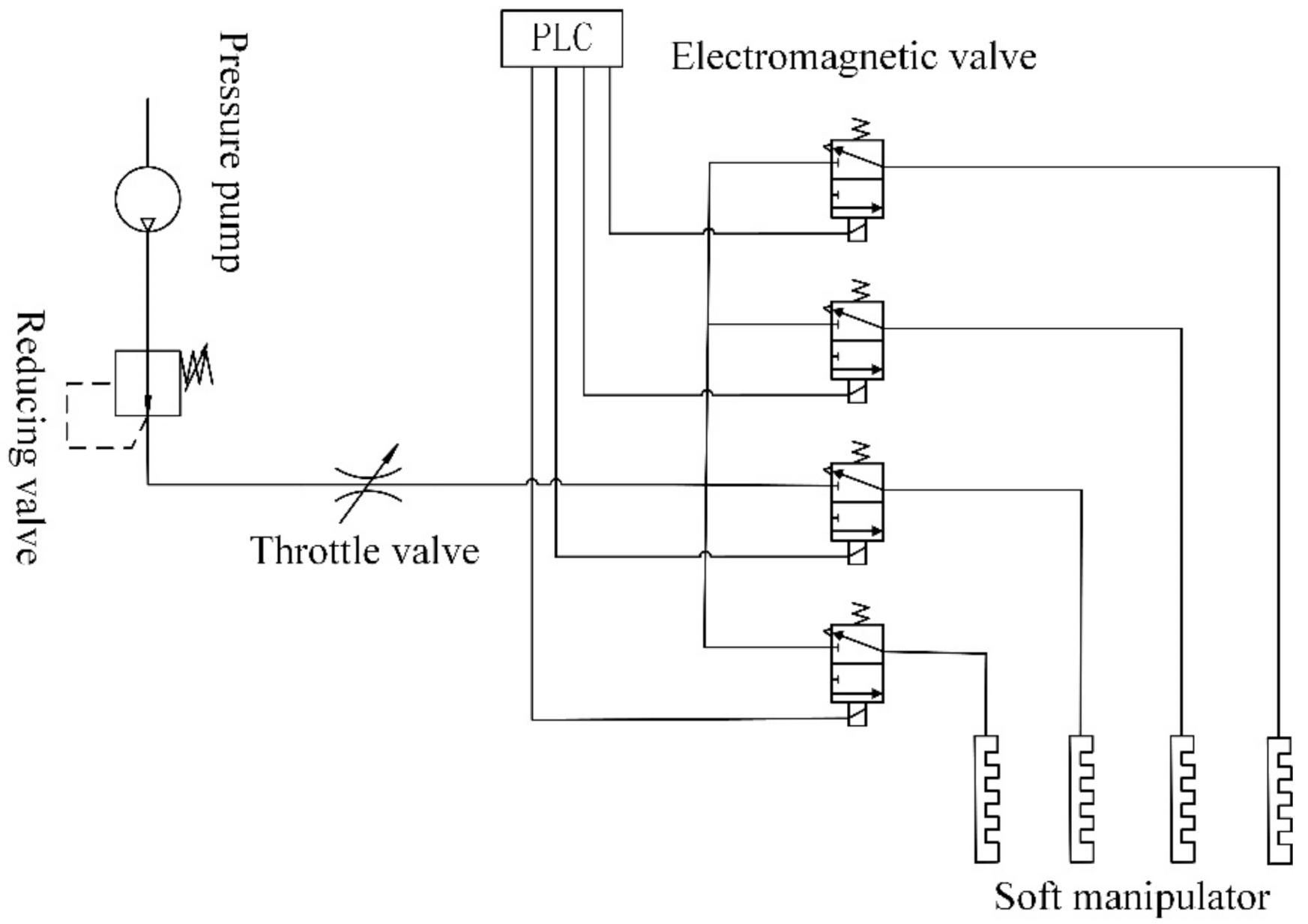
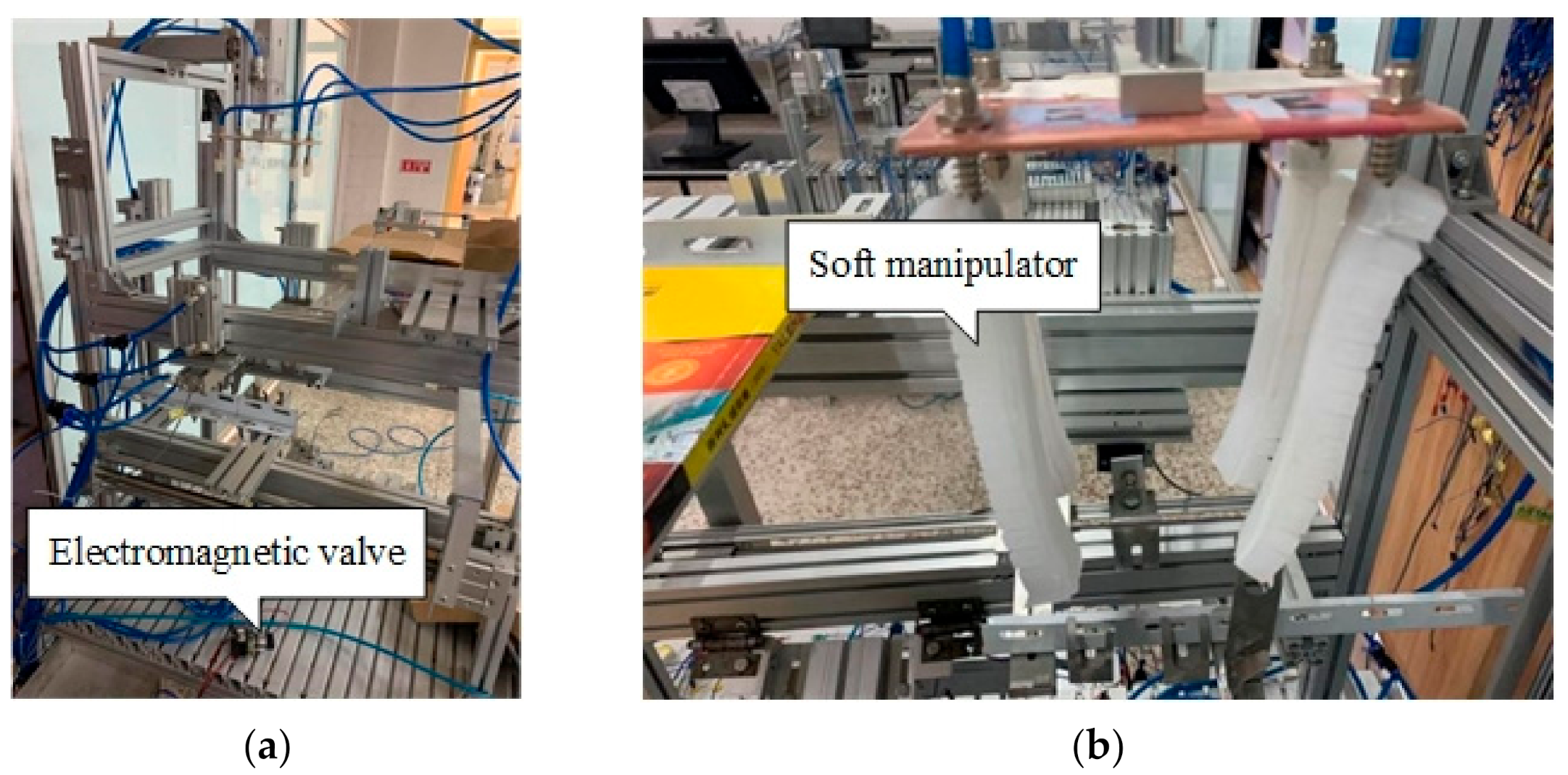
3.2. Experimental Control System
3.3. Experimental Ventilation Pressure System
4. Results and Discussion
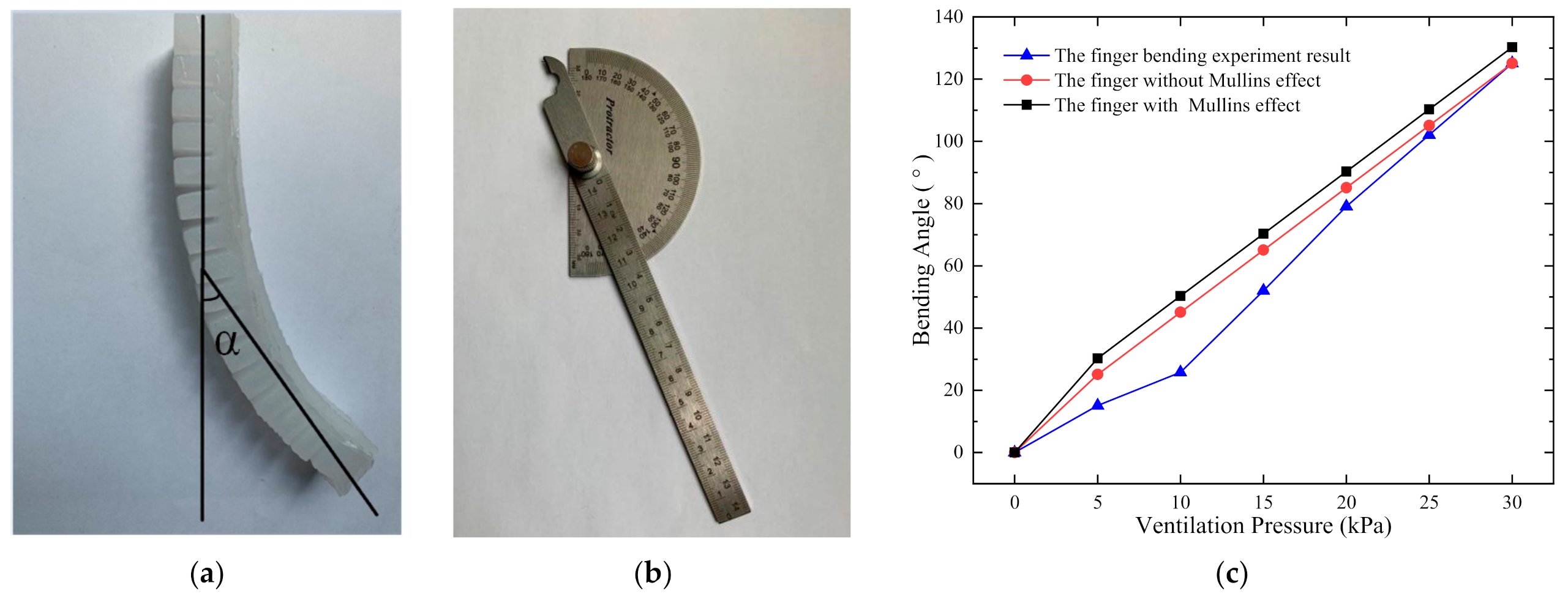
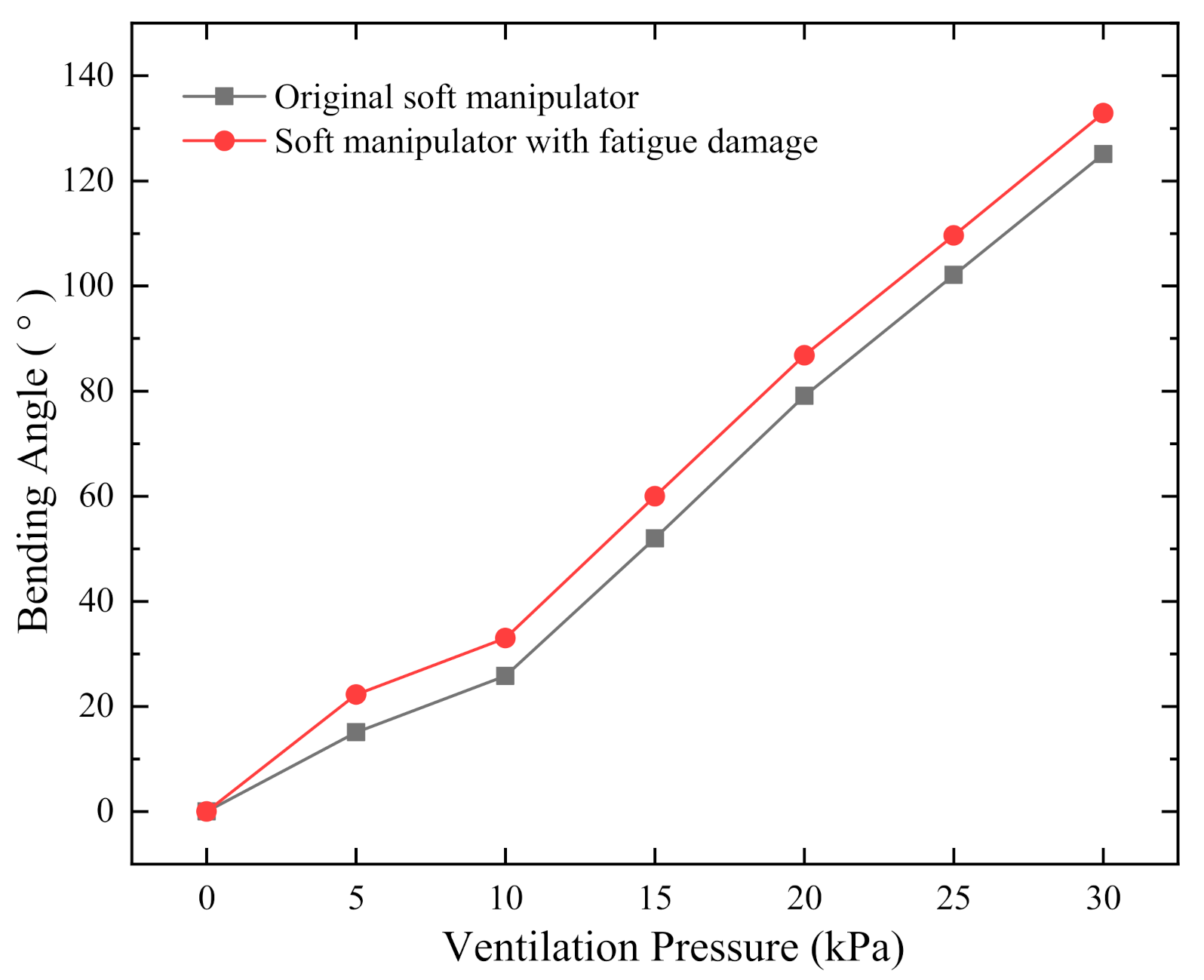
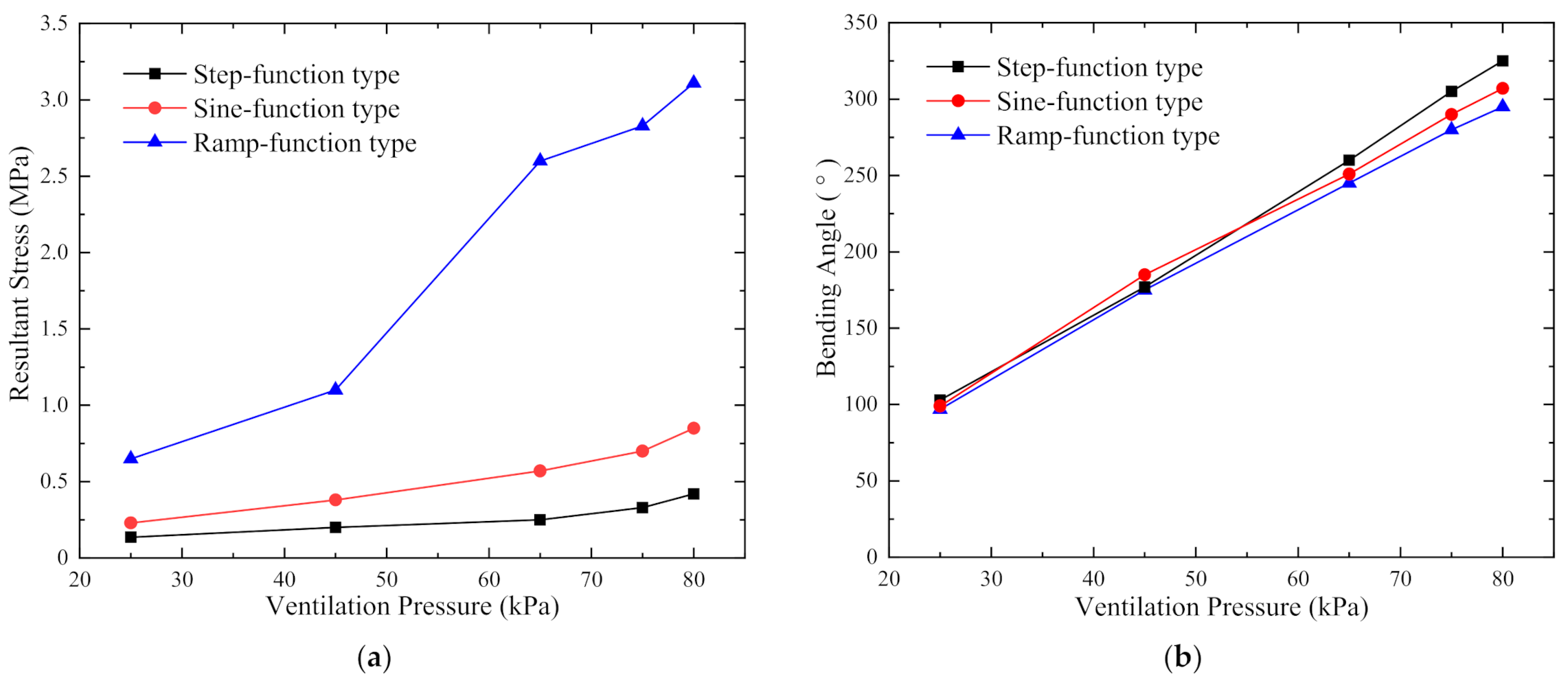
4.1. Study on Bending Angle
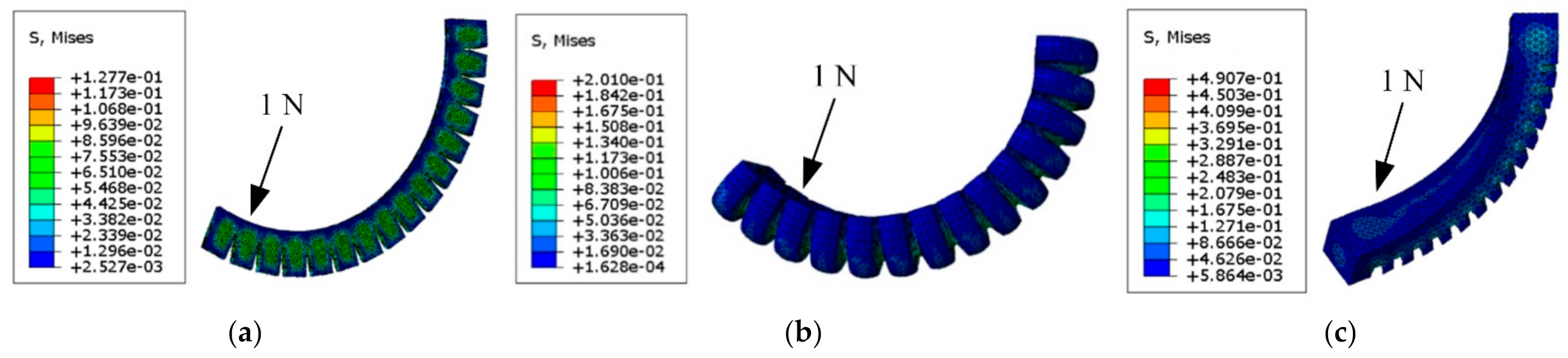
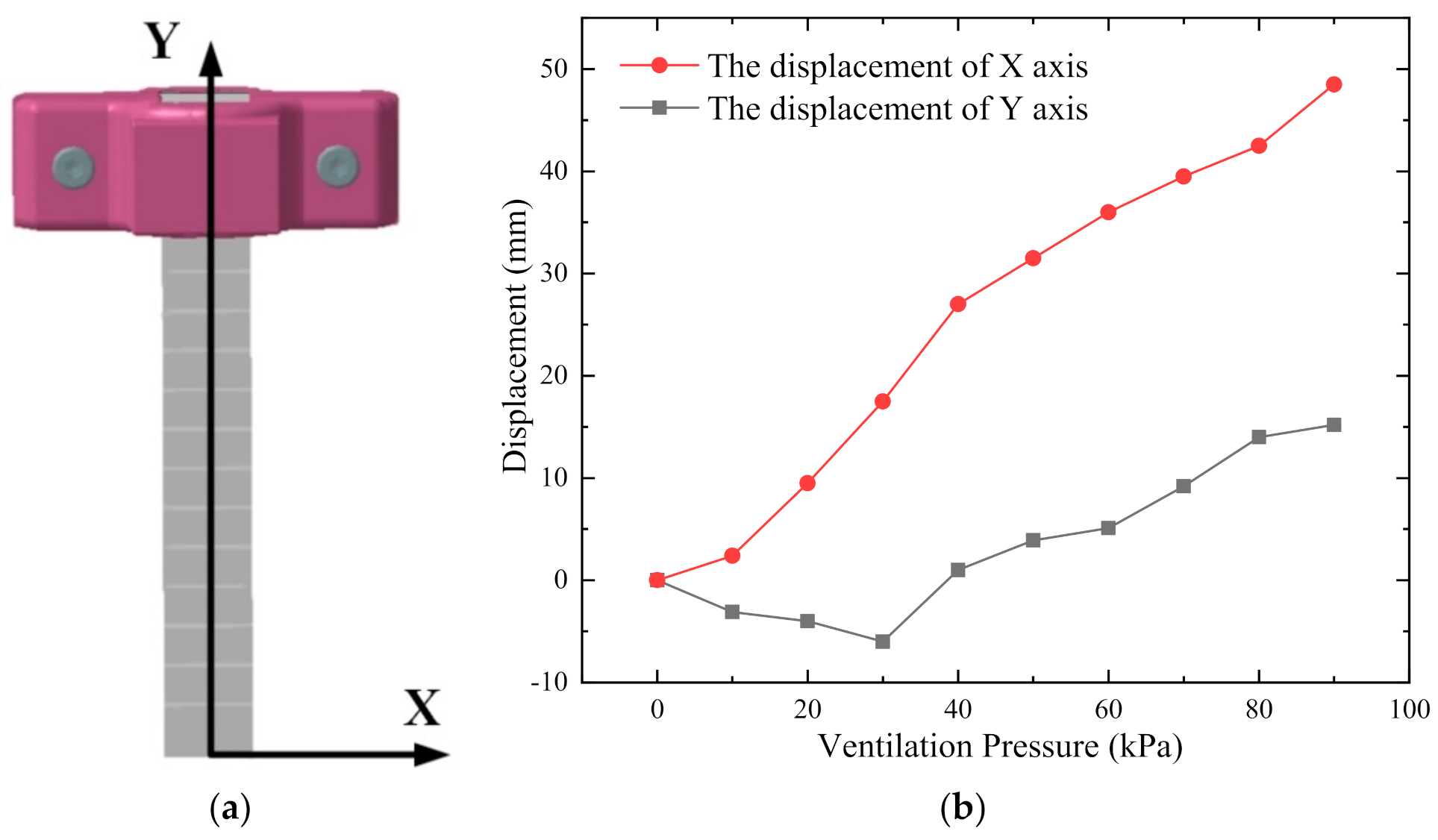
4.2. The end Displacement of the Soft Manipulator
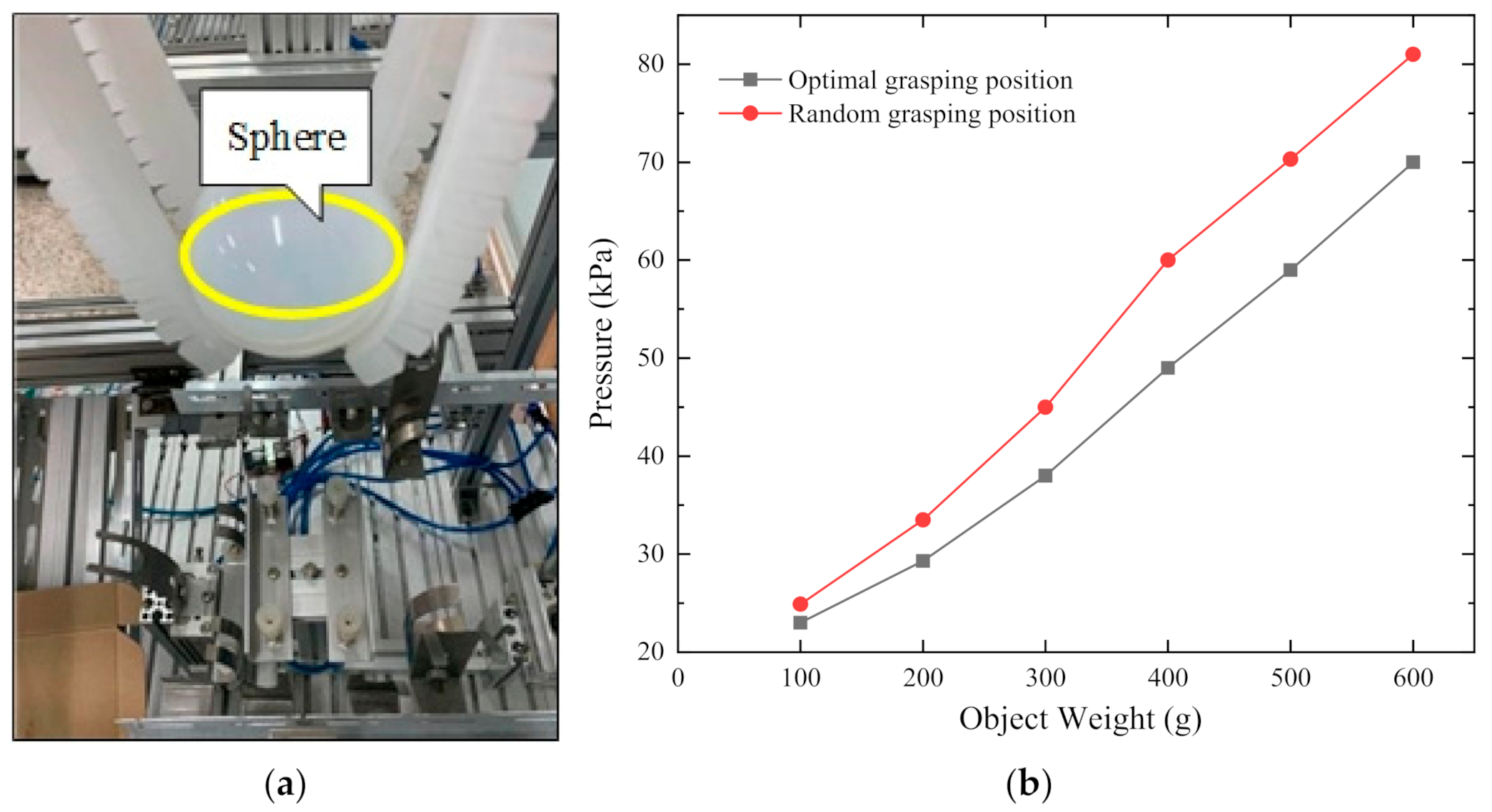
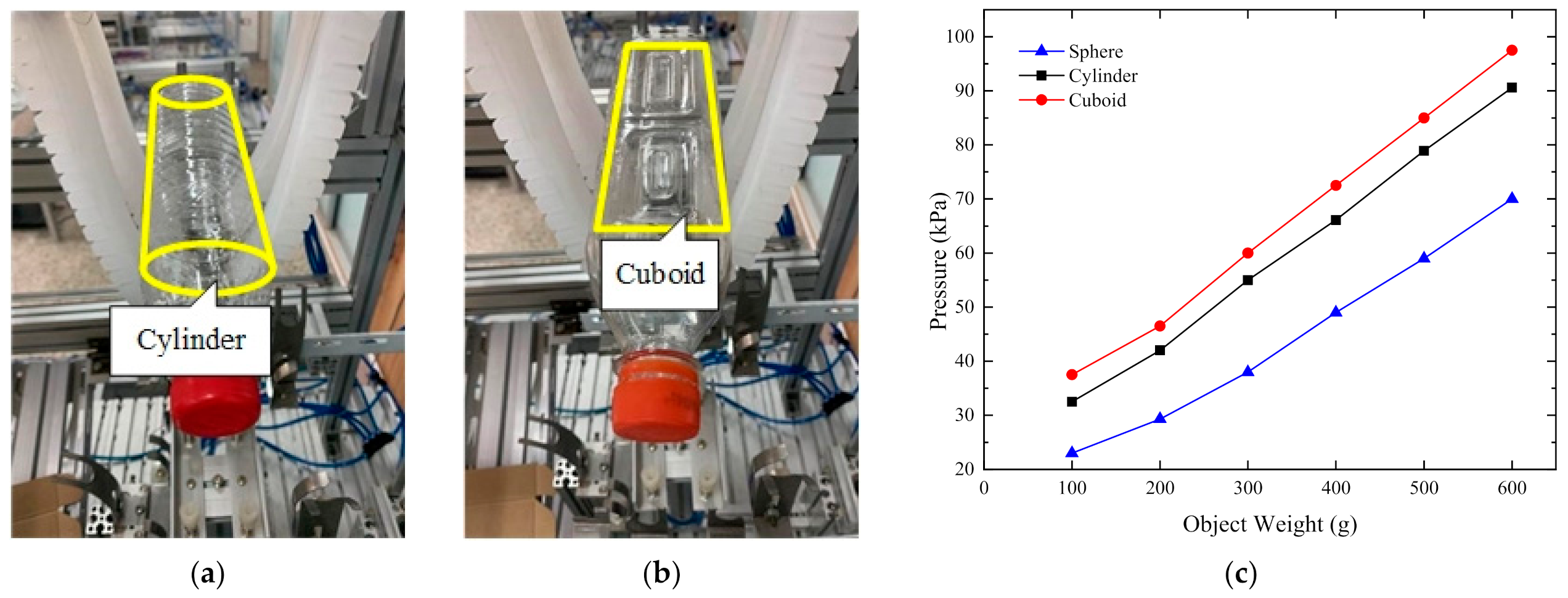
4.3. Pressure Compared between Optimal Position and Random Position
- The four contact points of the optimal solution are distributed near the xoy plane;
- The distance between the four contact points is about 90 degrees.
- Ventilate each finger of the soft manipulator;
- The four-finger soft manipulator is moved to the optimal position to grasp;
- The four-finger soft manipulator is moved to random position to grasp;
- By injecting water into the spherical container to change the weight, then measure the ventilation pressure.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Slotine, J.-J.E.; Li, W. On the Adaptive Control of Robot Manipulators. Int. J. Robot. Res. 1987, 6, 49–59. [Google Scholar] [CrossRef]
- Liao, J.; Chen, Z.; Yao, B. Performance-Oriented Coordinated Adaptive Robust Control for Four-Wheel Independently Driven Skid Steer Mobile Robot. IEEE Access 2017, 5, 19048–19057. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, G.; Zou, J.; Zhao, R.; Zhao, X.; Zhu, X. Soft wall-climbing robots. Sci. Robot. 2018, 3, eaat2874. [Google Scholar] [CrossRef] [Green Version]
- Majidi, C. Soft Robotics: A Perspective—Current Trends and Prospects for the Future. Soft Robot. 2013, 1, 5–11. [Google Scholar] [CrossRef]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400. [Google Scholar] [CrossRef] [Green Version]
- Huh, J.-H.; Koh, T.; Seo, K. Design of a Shipboard Outside Communication Network and Its Testbed Using PLC: For Safety Management during the Ship Building Process. Processes 2018, 6, 67. [Google Scholar] [CrossRef] [Green Version]
- Marchese, A.D.; Onal, C.D.; Rus, D. Autonomous Soft Robotic Fish Capable of Escape Maneuvers Using Fluidic Elastomer Actuators. Soft Robot. 2014, 1, 75–87. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Q.; Shi, W.; Chen, Z. Rubber fatigue life prediction using a random forest method and nonlinear cumulative fatigue damage model. J. Appl. Polym. Sci. 2020, 137, 48519. [Google Scholar] [CrossRef]
- Peng, Y.; Liu, G.; Quan, Y.; Zeng, Q. Cracking energy density calculation of hyperelastic constitutive model and its application in rubber fatigue life estimations. J. Appl. Polym. Sci. 2016, 133, 44195. [Google Scholar]
- Xu, K.; Wu, X.; Liu, X.; Wang, D. Identification of Robot Joint Torsional Stiffness Based on the Amplitude of the Frequency Response of Asynchronous Data. Machines 2021, 9, 204. [Google Scholar] [CrossRef]
- Hiller, J.; Lipson, H. Automatic Design and Manufacture of Soft Robots. IEEE Trans. Robot. 2012, 28, 457–466. [Google Scholar] [CrossRef]
- Lipson, H. Challenges and Opportunities for Design, Simulation, and Fabrication of Soft Robots. Soft Robot. 2013, 1, 21–27. [Google Scholar] [CrossRef]
- Sung, H.; Kim, H.; Choi, J.; Kim, H.; Li, C.; Cho, M. Structural design of soft robotics using a joint structure of photoresponsive polymers. Smart Mater. Struct. 2020, 29, 055032. [Google Scholar] [CrossRef]
- Trivedi, D.; Lotfi, A.; Rahn, C.D. Geometrically Exact Models for Soft Robotic Manipulators. IEEE Trans. Robot. 2008, 24, 773–780. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, S.; Wang, Z. A Soft-Robotic Gripper with Enhanced Object Adaptation and Grasping Reliability. IEEE Robot. Autom. Lett. 2017, 2, 2287–2293. [Google Scholar] [CrossRef]
- Aslinezhad, M.; Malekijavan, A.; Abbasi, P. Adaptive neuro-fuzzy modeling of a soft finger-like actuator for cyber-physical industrial systems. J. Supercomput. 2021, 77, 2624–2644. [Google Scholar] [CrossRef]
- Liu, W.; Jing, Z.; Pan, H.; Qiao, L.; Leung, H.; Chen, W. Distance-directed Target Searching for a Deep Visual Servo SMA Driven Soft Robot Using Reinforcement Learning. J. Bionic Eng. 2020, 17, 1126–1138. [Google Scholar] [CrossRef]
- Shen, W.; Huang, H.; Pang, Y.; Su, X. Review of the Energy Saving Hydraulic System Based on Common Pressure Rail. IEEE Access 2017, 5, 655–669. [Google Scholar] [CrossRef]
- Shen, W.; Mai, Y.; Su, X.; Zhao, J.; Jiang, J. A New Electric Hydraulic Actuator Adopted the Variable Displacement Pump. Asian J. Control 2016, 18, 178–191. [Google Scholar] [CrossRef]
- Su, X. Master–Slave Control for Active Suspension Systems with Hydraulic Actuator Dynamics. IEEE Access 2017, 5, 3612–3621. [Google Scholar] [CrossRef]
- Polygerinos, P.; Correll, N.; Morin, S.A.; Mosadegh, B.; Onal, C.D.; Petersen, K.; Cianchetti, M.; Tolley, M.T.; Shepherd, R.F. Soft Robotics: Review of Fluid-Driven Intrinsically Soft Devices; Manufacturing, Sensing, Control, and Applications in Human-Robot Interaction. Adv. Eng. Mater. 2017, 19, 1700016. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Advanced Valves and Pump Coordinated Hydraulic Control Design to Simultaneously Achieve High Accuracy and High Efficiency. IEEE Trans. Control Syst. Technol. 2021, 29, 236–248. [Google Scholar] [CrossRef]
- Lyu, L.; Chen, Z.; Yao, B. Development of Pump and Valves Combined Hydraulic System for Both High Tracking Precision and High Energy Efficiency. IEEE Trans. Ind. Electron. 2019, 66, 7189–7198. [Google Scholar] [CrossRef]
- Ilievski, F.; Mazzeo, A.D.; Shepherd, R.F.; Chen, X.; Whitesides, G.M.J.A.C. Soft robotics for chemists. Angew. Chem. 2011, 123, 1930–1935. [Google Scholar] [CrossRef]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar] [CrossRef] [Green Version]
- Wehner, M.; Tolley, M.T.; Mengüç, Y.; Park, Y.-L.; Mozeika, A.; Ding, Y.; Onal, C.; Shepherd, R.F.; Whitesides, G.M.; Wood, R.J. Pneumatic Energy Sources for Autonomous and Wearable Soft Robotics. Soft Robot. 2014, 1, 263–274. [Google Scholar] [CrossRef] [Green Version]
- Gálvez, A.; Seneviratne, D.; Galar, D. Development and synchronisation of a physics-based model for heating, ventilation and air conditioning system integrated into a hybrid model. Int. J. Hydromechatronics 2021, 4, 230–258. [Google Scholar] [CrossRef]
- Zhang, M.; Li, G.; Yang, X.; Xiao, Y.; Yang, T.; Wong, T.-W.; Li, T. Artificial muscle driven soft hydraulic robot: Electromechanical actuation and simplified modeling. Smart Mater. Struct. 2018, 27, 095016. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A Resilient, Untethered Soft Robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Mosadegh, B.; Polygerinos, P.; Keplinger, C.; Wennstedt, S.; Shepherd, R.F.; Gupta, U.; Shim, J.; Bertoldi, K.; Walsh, C.J.; Whitesides, G.M. Pneumatic Networks for Soft Robotics that Actuate Rapidly. Adv. Funct. Mater. 2014, 24, 2163–2170. [Google Scholar] [CrossRef]
- Li, Y.; Chen, Y.; Yang, Y.; Wei, Y. Passive Particle Jamming and Its Stiffening of Soft Robotic Grippers. IEEE Trans. Robot. 2017, 33, 446–455. [Google Scholar] [CrossRef]
- Huh, J.; Seo, Y. Understanding Edge Computing: Engineering Evolution with Artificial Intelligence. IEEE Access 2019, 7, 164229–164245. [Google Scholar] [CrossRef]
- Zhang, H. Research on Grasping Performance of Pneumatic Soft Gripper. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2019. [Google Scholar]
- Wang, T.; Ge, L.; Gu, G. Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions. Sens. Actuators A Phys. 2018, 271, 131–138. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, Y.; Zhu, Y.; Zhu, S. A computationally efficient dynamical model of fluidic soft actuators and its experimental verification. Mechatronics 2019, 58, 1–8. [Google Scholar] [CrossRef]
- Wang, J.; Fei, Y.; Pang, W. Design, Modeling, and Testing of a Soft Pneumatic Glove with Segmented PneuNets Bending Actuators. IEEE/ASME Trans. Mechatron. 2019, 24, 990–1001. [Google Scholar] [CrossRef]
- Merckel, Y.; Brieu, M.; Diani, J.; Caillard, J. A Mullins softening criterion for general loading conditions. J. Mech. Phys. Solids 2012, 60, 1257–1264. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elasticity Modulus/GPa | Poisson’s Ratio | Density/kg·m−3 |
|---|---|---|
| 6.5 | 0.2 | 750 |
| Angle (°) | 91.65 | 47.34 | 91.65 | 136.82 | 91.65 | 227.09 | 91.65 | 318.71 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Li, S.; Wu, Y.; Zhu, M. An Investigation on the Grasping Position Optimization-Based Control for Industrial Soft Robot Manipulator. Machines 2021, 9, 363. https://doi.org/10.3390/machines9120363
Zhang G, Li S, Wu Y, Zhu M. An Investigation on the Grasping Position Optimization-Based Control for Industrial Soft Robot Manipulator. Machines. 2021; 9(12):363. https://doi.org/10.3390/machines9120363
Chicago/Turabian StyleZhang, Guangcheng, Shenchen Li, Yi Wu, and Mingkang Zhu. 2021. "An Investigation on the Grasping Position Optimization-Based Control for Industrial Soft Robot Manipulator" Machines 9, no. 12: 363. https://doi.org/10.3390/machines9120363
APA StyleZhang, G., Li, S., Wu, Y., & Zhu, M. (2021). An Investigation on the Grasping Position Optimization-Based Control for Industrial Soft Robot Manipulator. Machines, 9(12), 363. https://doi.org/10.3390/machines9120363