
Kineto-Static Analysis and Design Optimization of a 3-DOF Wrist Rehabilitation Parallel Robot with Consideration of the Effect of the Human Limb †


Abstract
:1. Introduction
2. Methods
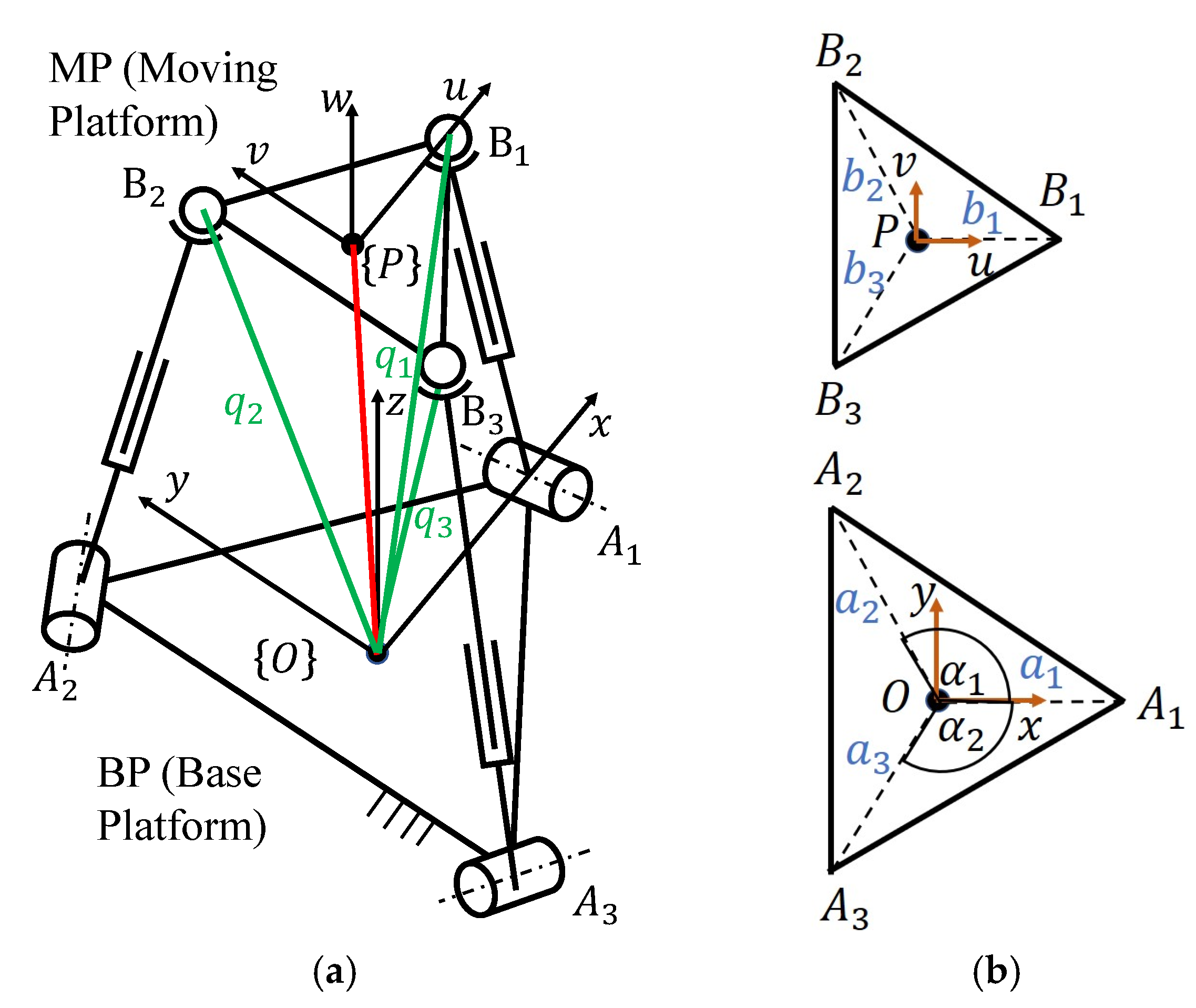
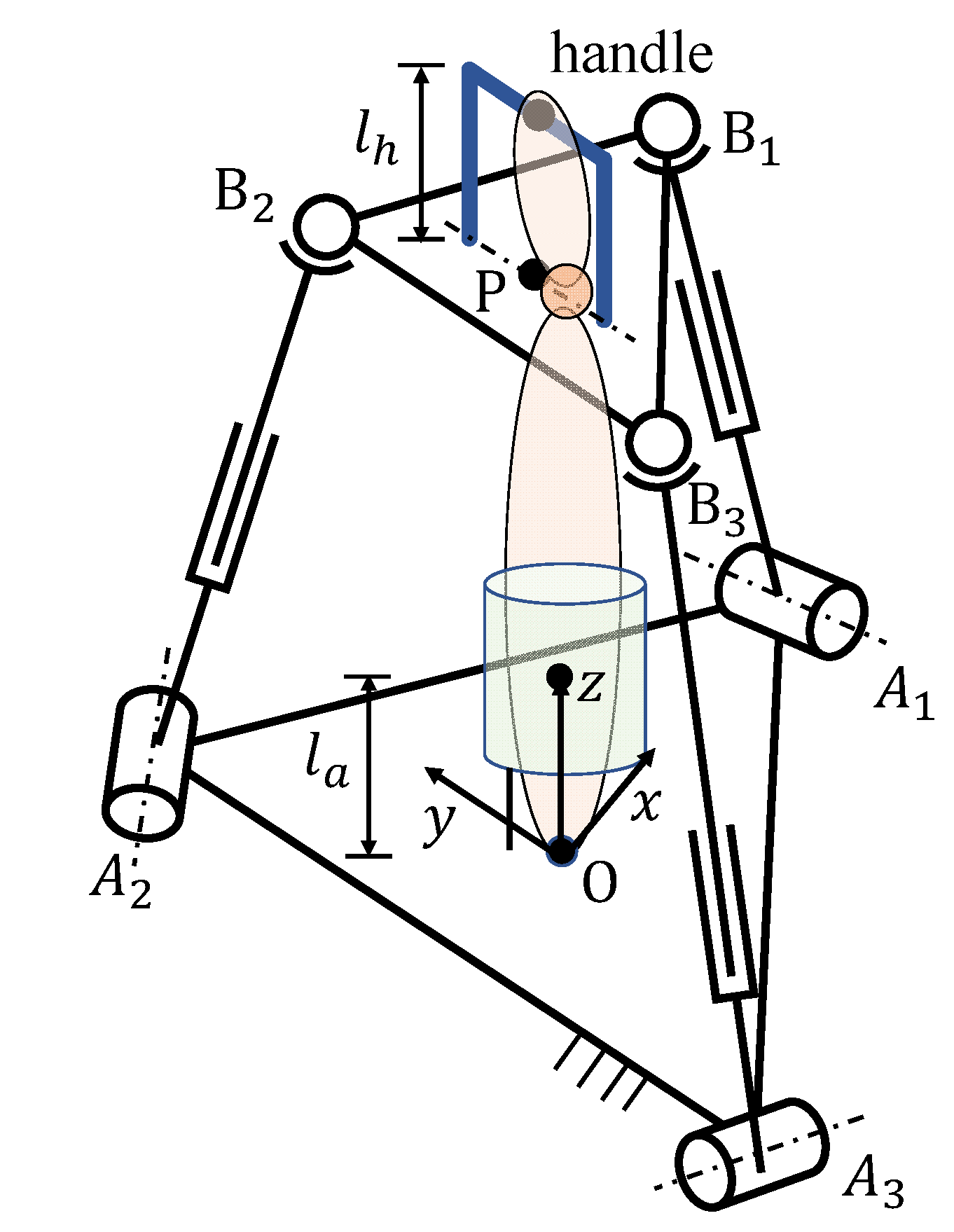
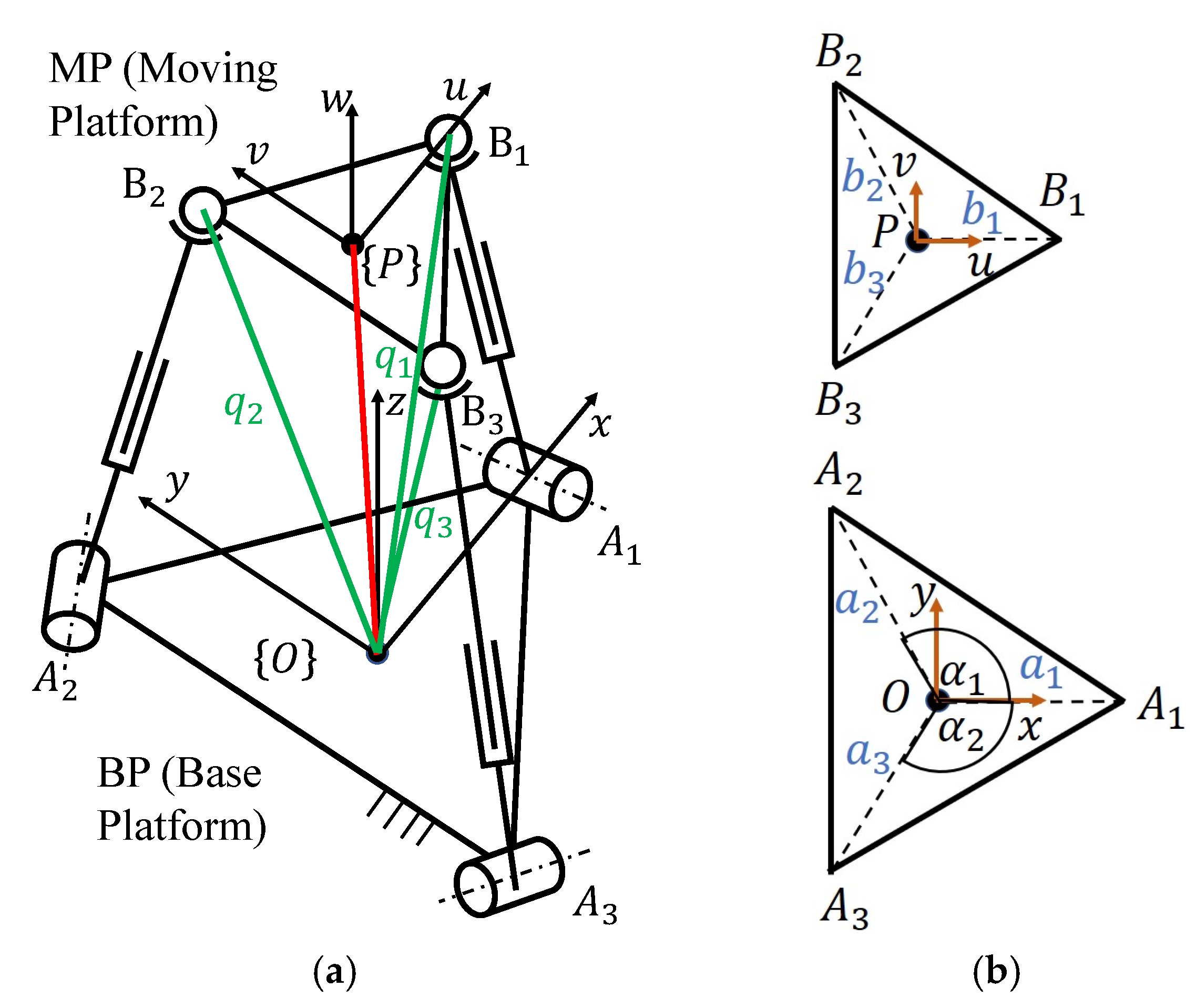
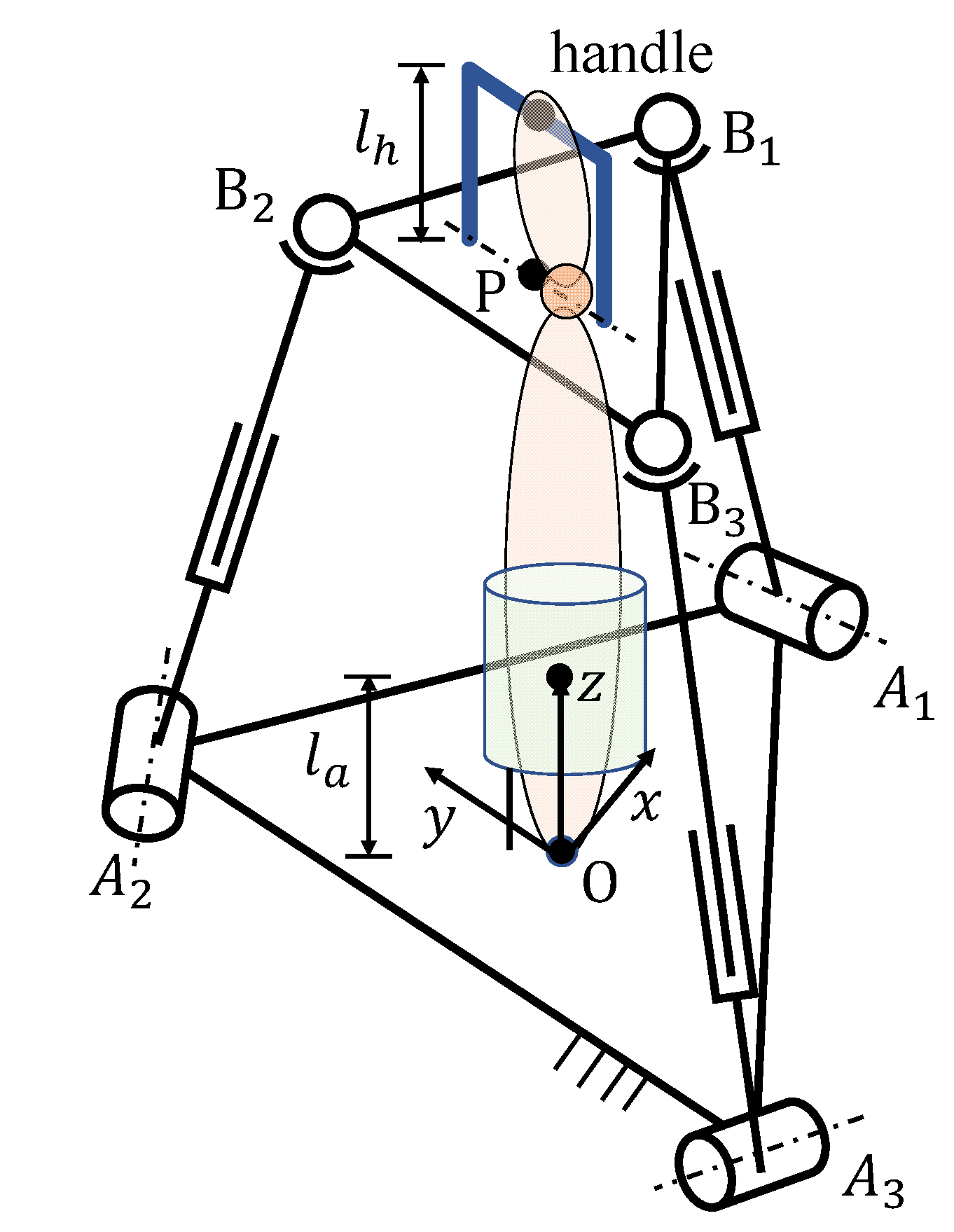
2.1. Position Analysis of a Wrist Rehabilitation Robot
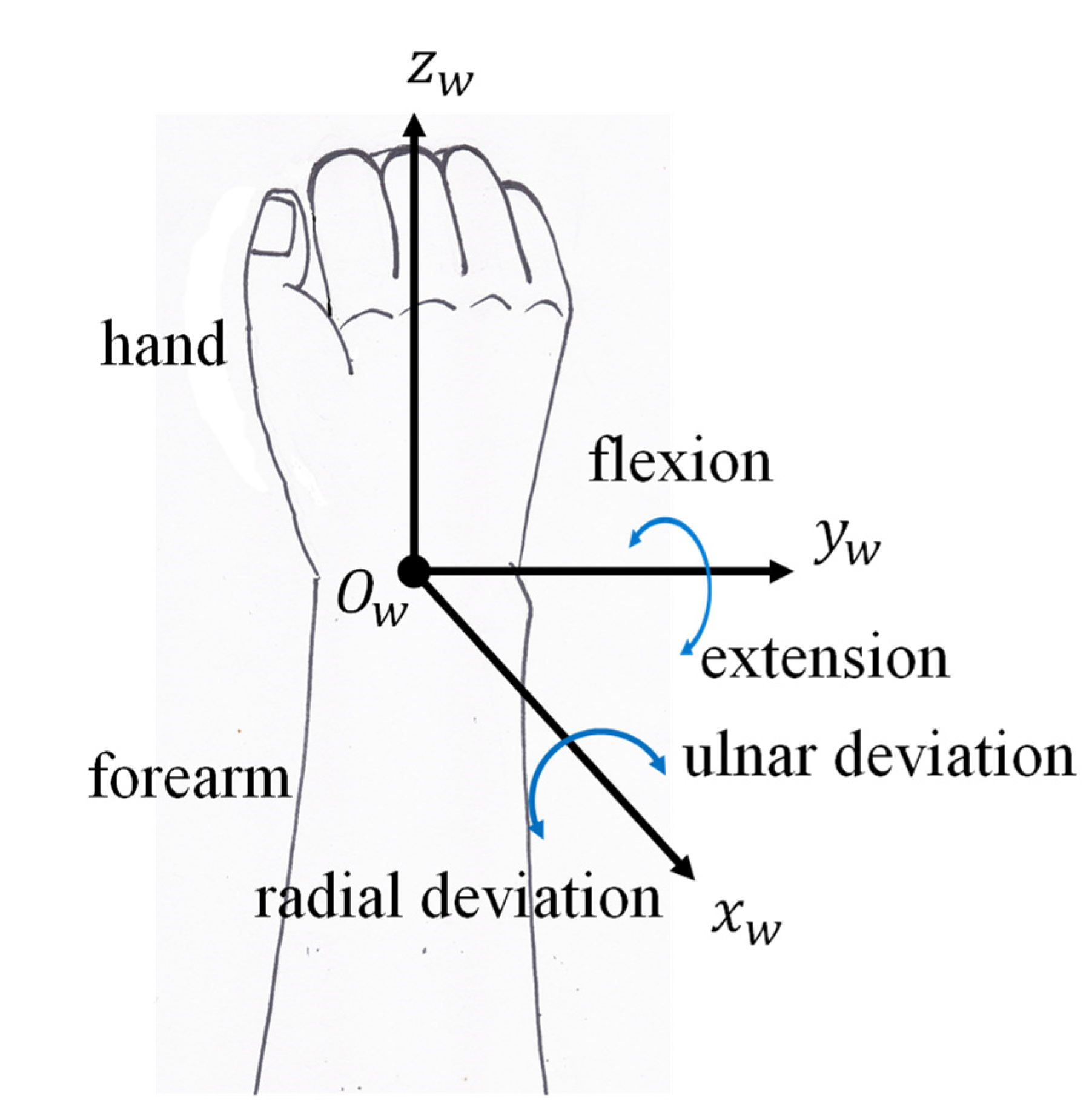
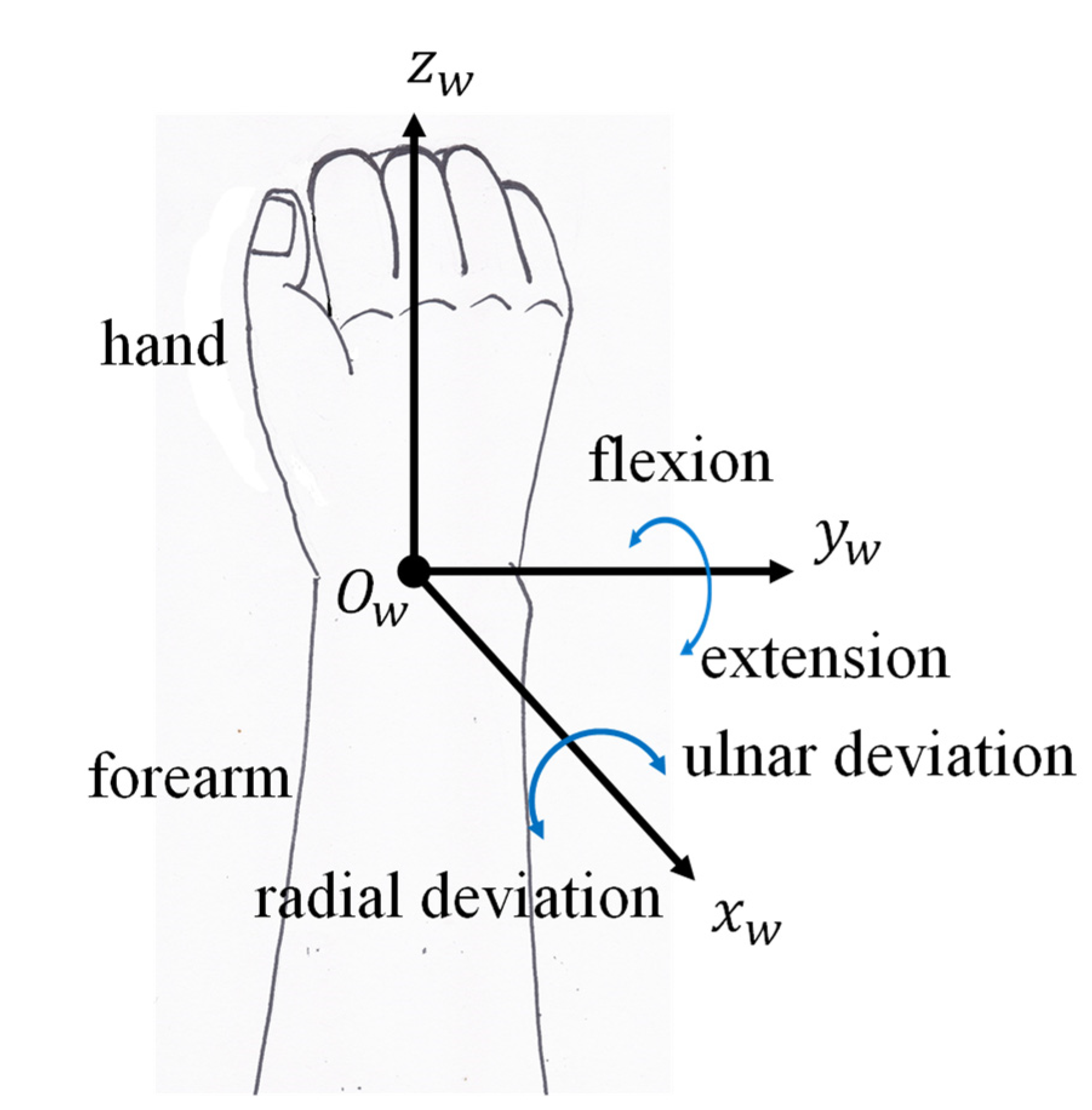
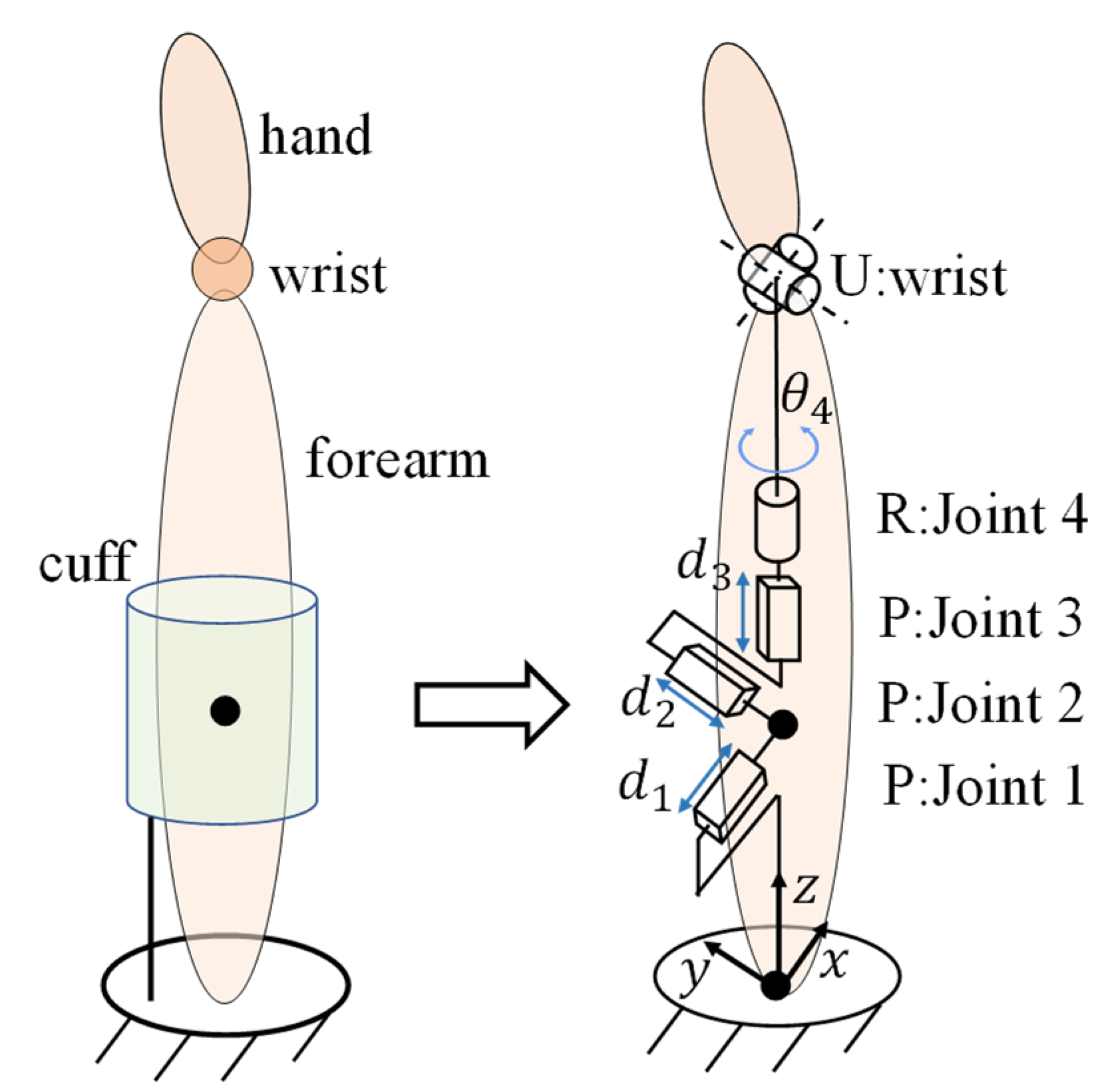
2.2. Inverse Kinematic Analysis of the Human Limb
- The hand is securely attached to the handle, and the finger effects are ignored throughout the motion.
- The cuff is tightly fastened to the forearm, with no slippage.
- The dynamic impact on the robot will not be considered.
2.3. Analysis of Unwanted Forces at the Interface between the Human and Robot
2.4. Static Analysis of the Human Limb with the 3-RPS Robot
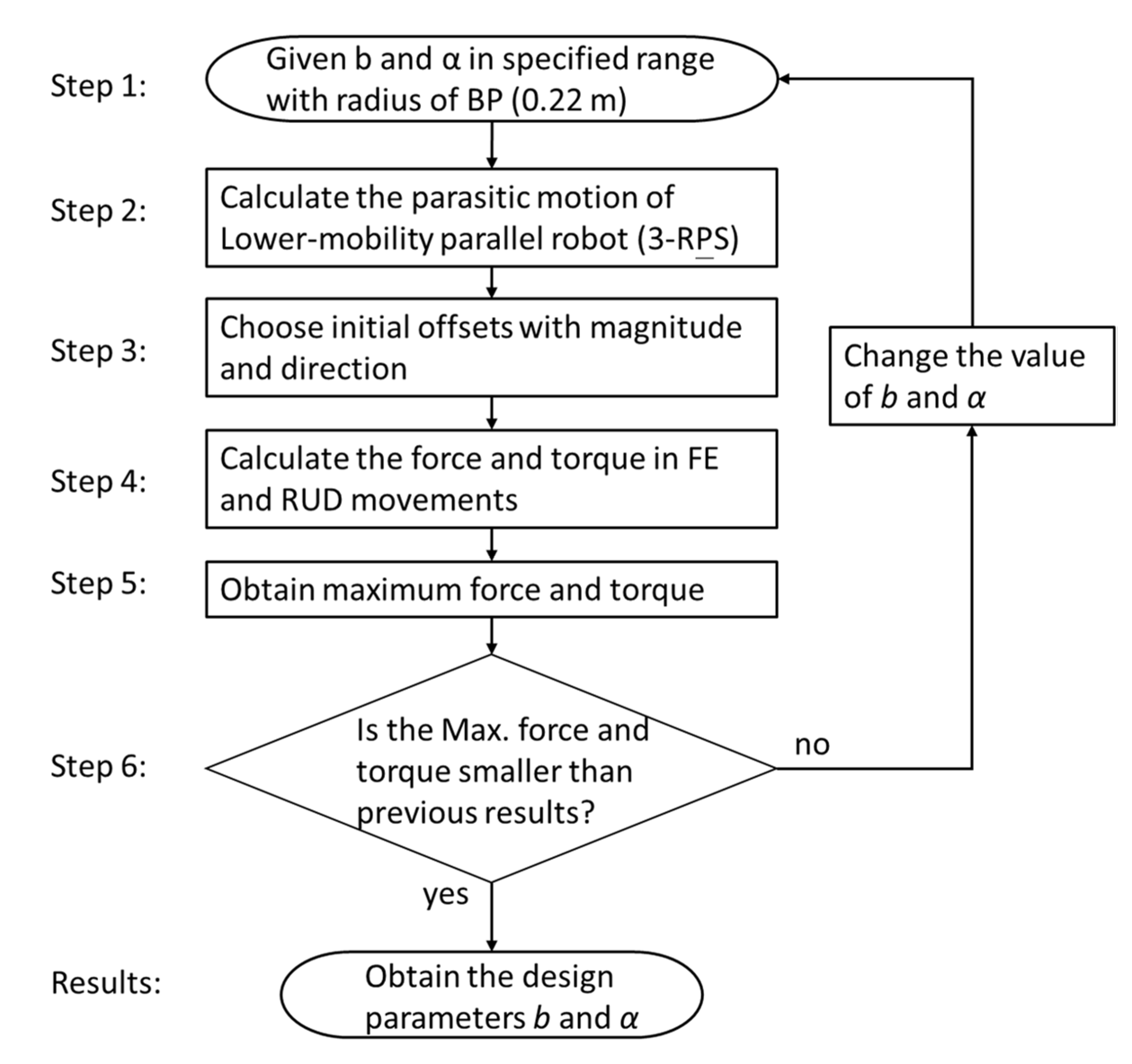
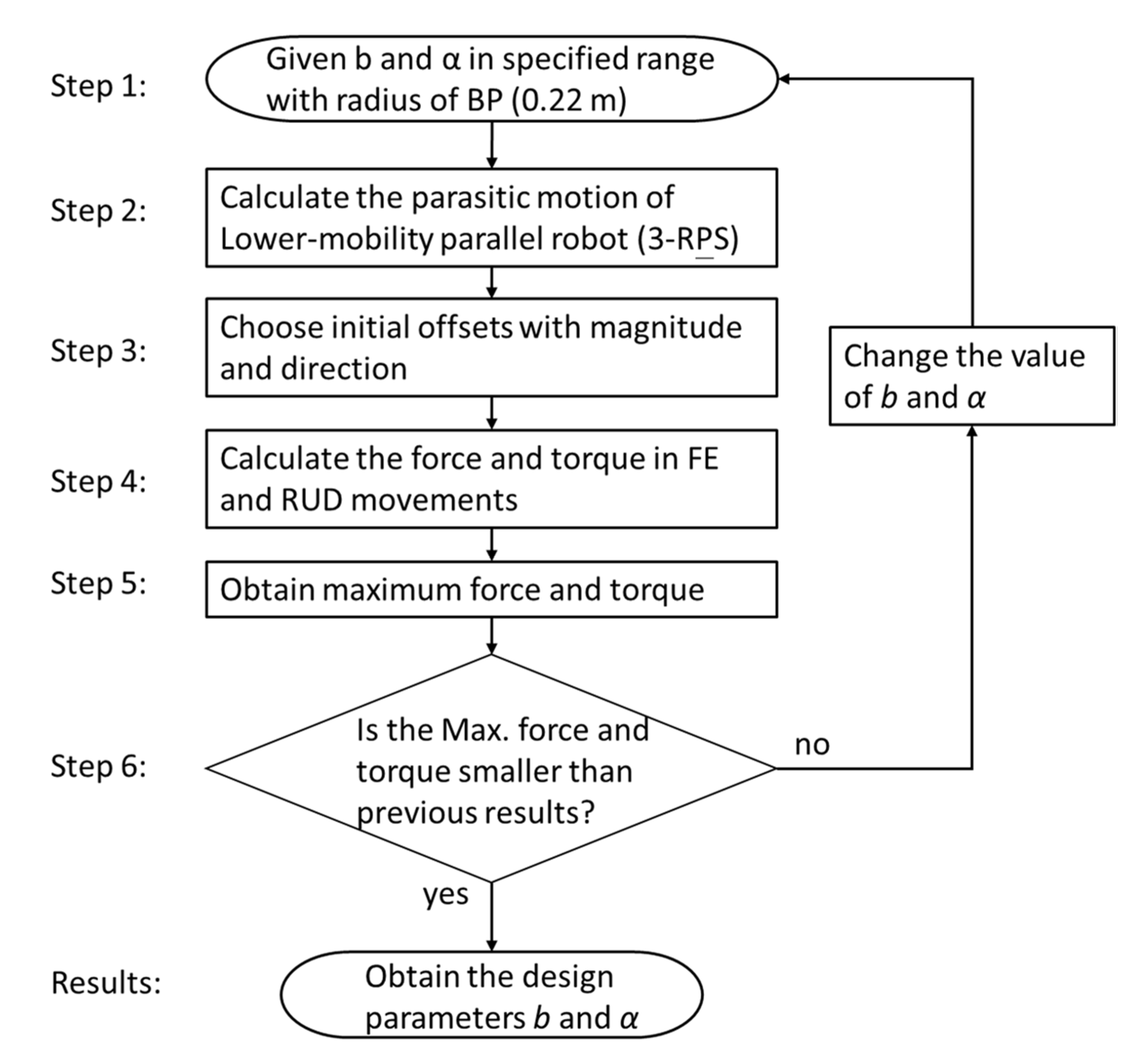
2.5. Multi-Objective Optimization
3. Results and Discussion
3.1. Kineto-Static Analysis and Optimization Design
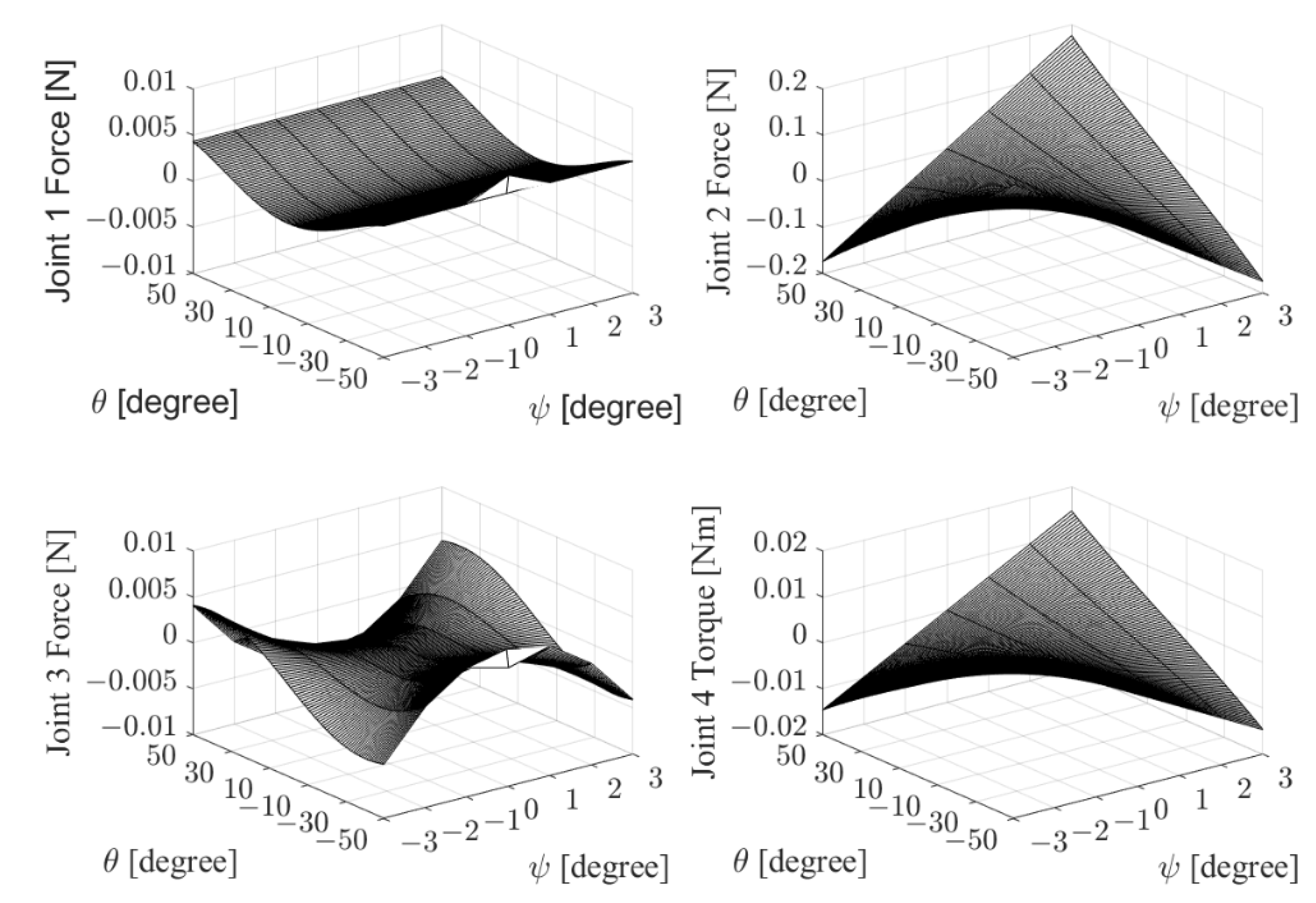
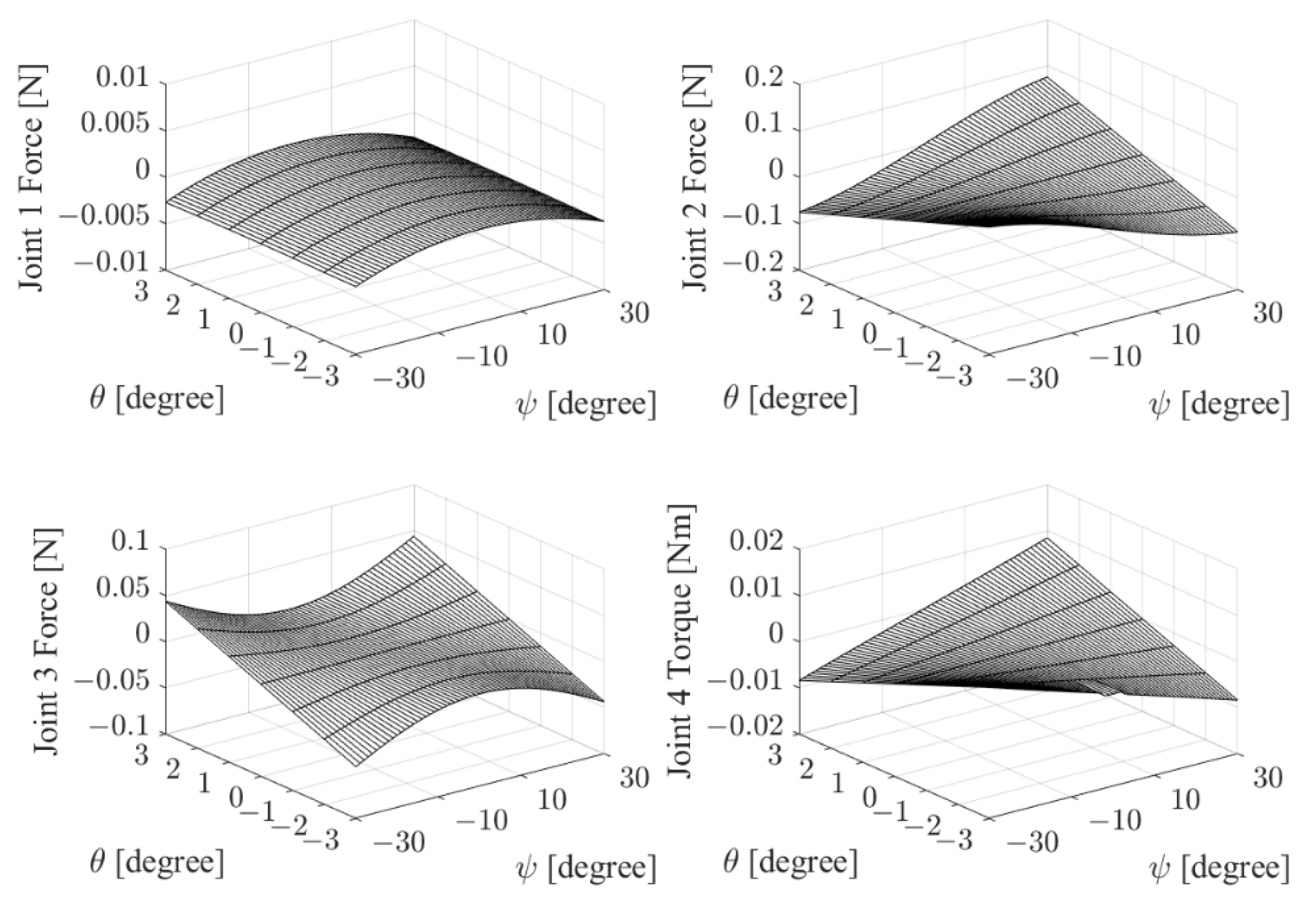
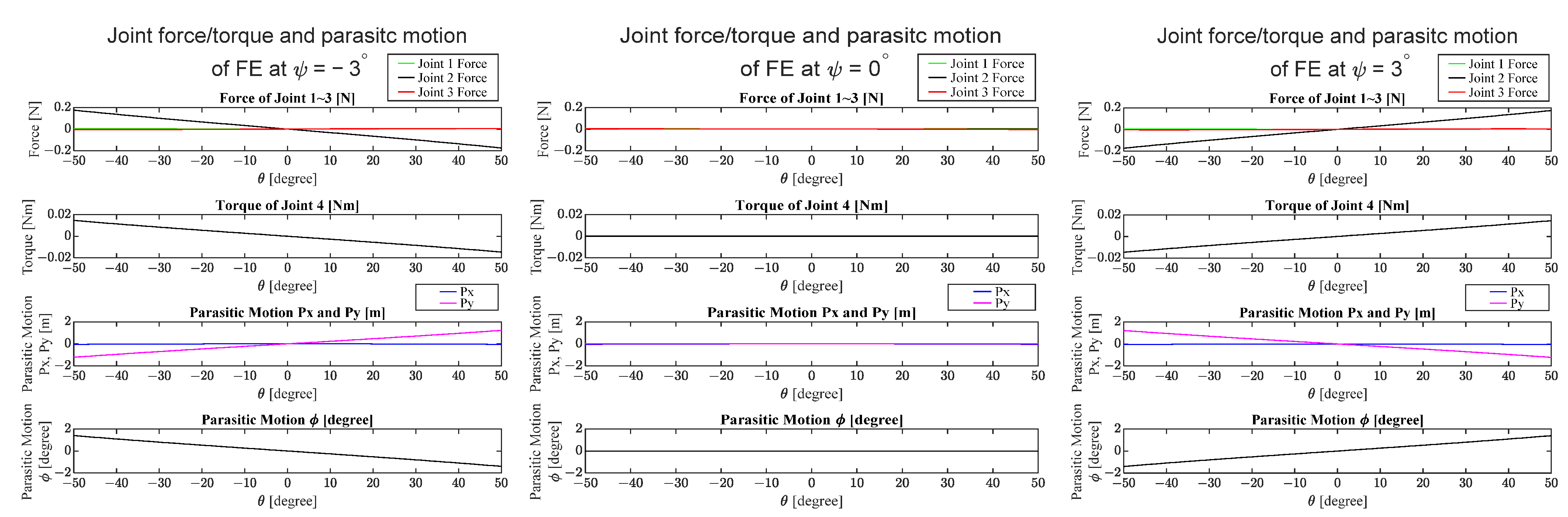
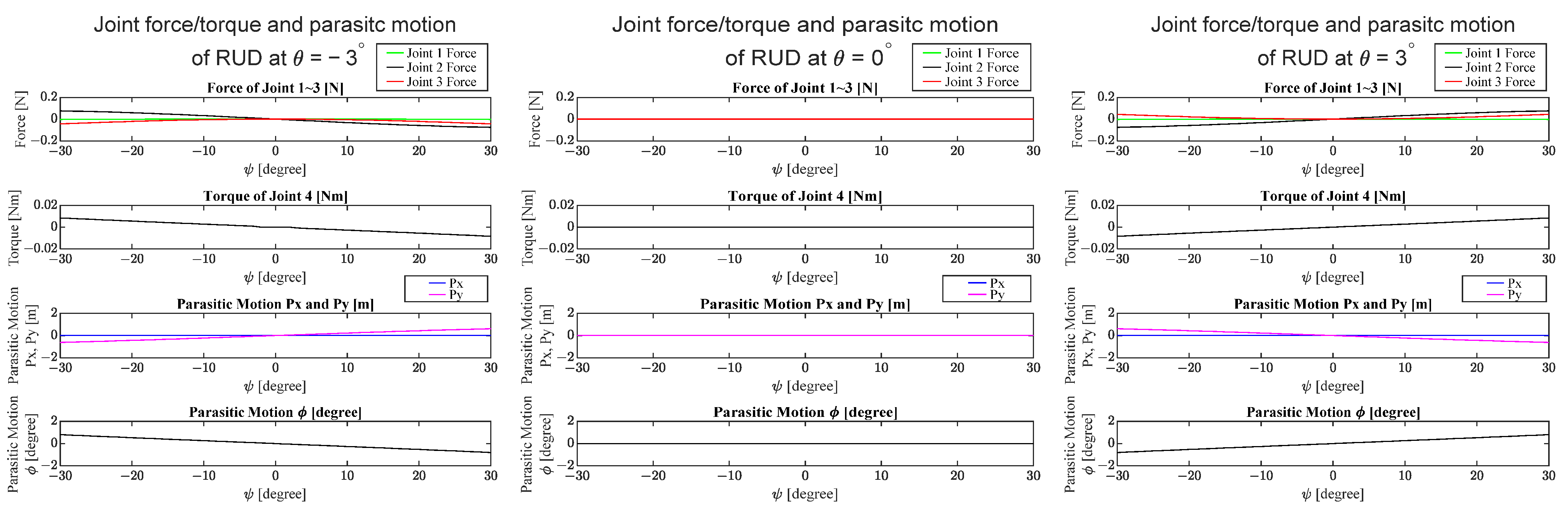
3.2. Kineto-Static Analysis of the Candidate Design
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maciejasz, P.; Eschweiler, J.; Gerlach-Hahn, K.; Jansen, T.A.; Leonhardt, S. A Survey on Robotic Devices for Upper Limb Rehabilitation. J. Neuroeng. Rehabil. 2014, 11, 3–31. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gull, M.A.; Bai, S.; Bak, T. A Review on Design of Upper Limb Exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef] [Green Version]
- Qassim, H.M.; Wan Hasan, W.Z. A Review on Upper Limb Rehabilitation Robots. Appl. Sci. 2020, 10, 6976. [Google Scholar] [CrossRef]
- Martinez, J.A.; Ng, P.; Lu, S.; Campagna, M.S.; Celik, O. Design of Wrist Gimbal: A Forearm and Wrist Exoskeleton for Stroke Rehabilitation. In Proceedings of the 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013; pp. 1–6. [Google Scholar]
- Pezent, E.; Rose, C.G.; Deshpande, A.D.; O’Malley, M.K. Design and characterization of the OpenWrist: A robotic wrist exoskeleton for coordinated hand-wrist rehabilitation. In Proceedings of the 2017 IEEE International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 720–725. [Google Scholar]
- McDaid, A.J. Development of an Anatomical Wrist Therapy Exoskeleton (AW-TEx). In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 434–439. [Google Scholar]
- Singh, N.; Saini, M.; Anand, S.; Kumar, N.; Srivastava, M.V.P.; Mehndiratta, A. Robotic Exoskeleton for Wrist and Fingers Joint in Post-Stroke Neuro-Rehabilitation for Low-Resource Settings. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2369–2377. [Google Scholar] [CrossRef] [PubMed]
- Panny, M.; Mayr, A.; Nagiller, M.; Kim, Y. A Domestic Robotic Rehabilitation Device for Assessment of Wrist Function for Outpatients. J. Rehabil. Assist. Technol. Eng. 2020, 7, 2055668320961233. [Google Scholar] [CrossRef] [PubMed]
- Jarrasse, N.; Morel, G. Connecting a Human Limb to an Exoskeleton. IEEE Trans. Robot. 2012, 28, 697–709. [Google Scholar] [CrossRef] [Green Version]
- Näf, M.B.; Junius, K.; Rossini, M.; Rodriguez, G.C.; Vanderborght, B.; Lefeber, D. Misalignment Compensation for Full Human-Exoskeleton Kinematic Compatibility: State of the Art and Evaluation. Appl. Mech. Rev. 2019, 70, 050802-1–050802-19. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.C.; Takeda, Y. Kineto-Static Analysis of a Wrist Rehabilitation Robot with Compliance and Passive Joints for Joint Misalignment Compensation. Machines 2020, 8, 23. [Google Scholar] [CrossRef]
- Liu, Y.C.; Takeda, Y. Kineto-static Analysis of a Compact Wrist Rehabilitation Robot Including the Effect of Human Soft Tissue to Compensate for Joint Misalignment. In Proceedings of the Symposium on Robot Design, Dynamics and Control, Sapporo, Japan, 20–24 September 2021; pp. 321–329. [Google Scholar]
- Liu, Y.C.; Takeda, Y. Analysis of a 3-DOF Parallel Robot for Wrist Rehabilitation with Consideration of Effect of Human Limb. In Proceedings of the 3rd Jc-IFToMM International Symposium, 26th Jc-IFToMM Symposium on Mechanism and Machine Theory, Online, 19 March 2021; pp. 49–56. [Google Scholar]
- Hüsing, M.; Riedel, M.; Corves, B.; Nefzi, M. Development of Tailor-Made Robots-From Concept to Realization for Small and Medium-Sized Enterprises. In Proceedings of the 13th World Congress in Mechanism and Machine Science, Guanajuato, Mexico, 19–23 June 2011; pp. 1–6. [Google Scholar]
- Lynch, K.M.; Park, F.C. Modern Robotics: Mechanics, Planning and Control; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Takeda, Y.; Sugahara, Y.; Matsuura, D.; Matsuda, S.; Suzuki, T.; Kitagawa, M.; Liu, Y.C. Introduction of Dynamic Pair to Modeling and Kinemato-Dynamic Analysis of Wearable Assist-Devices. In Proceedings of the JSME Annual Mechanical Engineering Congress, Akita, Japan, 8–11 September 2019; p. S11405. [Google Scholar]
- Yu, T.F.; Wilson, A.J. A passive movement method for parameter estimation of a musculo-skeletal arm model incorporating a modified hill muscle model. Comput. Methods Programs Biomed. 2014, 114, 46–59. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Faghihi, A.; Haghpanah, S.A.; Farahmand, F.; Jafari, M. Design and Fabrication of a Robot for Neurorehabilitation; Smart RoboWrist. In Proceedings of the 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 5–6 November 2015; pp. 447–450. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Population Size | Crossover Rate | Mutation Rate |
|---|---|---|
| 50 | 0.8 | 0.01 |
| (m) | (Degree) | ||
|---|---|---|---|
| 0.0502 | 90.1497 | 3.1945 | 0.1026 |
| 0.0503 | 90.1514 | 3.1957 | 0.1026 |
| 0.0504 | 90.1514 | 3.1961 | 0.1026 |
| 0.0512 | 90.1707 | 3.2032 | 0.1026 |
| 0.0565 | 90.0000 | 3.9313 | 0.0038 |
| 0.0571 | 90.0000 | 3.9482 | 0.0038 |
| 0.0574 | 90.0000 | 3.9574 | 0.0038 |
| 0.0586 | 90.0000 | 3.9910 | 0.0038 |
| 0.0597 | 90.0000 | 4.0246 | 0.0038 |
| 0.0683 | 90.0000 | 4.3412 | 0.0038 |
| 0.0780 | 90.0000 | 4.8647 | 0.0038 |
| 0.0850 | 90.0000 | 5.2978 | 0.0038 |
| Description | Value | Unit |
|---|---|---|
| Radius of moving platform (MP), b | 0.05 | m |
| The arrangement angle of the revolute joints, | 90.15 | degree |
| Radius of base platform (BP) | 0.22 | m |
| Initial distance between BP and MP | 0.25 | m |
| FE Movement | RUD Movement | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| (0, 0, 0) | 0.006 | 0.175 | 0.005 | 0.015 | (0, 0, 0) | 0.003 | 0.075 | 0.044 | 0.008 |
| (5, 0, 0) | 0.588 | 0.126 | 0.267 | 0.015 | (5, 0, 0) | 0.003 | 0.042 | 0.067 | 0.008 |
| (−5, 0, 0) | 0.580 | 0.226 | 0.266 | 0.015 | (−5, 0, 0) | 0.005 | 0.109 | 0.037 | 0.008 |
| (0, 5, 0) | 0.027 | 0.177 | 0.038 | 0.015 | (0, 5, 0) | 0.018 | 0.337 | 0.305 | 0.008 |
| (0, −5, 0) | 0.027 | 0.177 | 0.038 | 0.015 | (0, −5, 0) | 0.018 | 0.337 | 0.305 | 0.008 |
| (0, 0, 5) | 0.266 | 0.175 | 0.589 | 0.015 | (0, 0, 5) | 0.037 | 0.336 | 0.307 | 0.008 |
| (0, 0, −5) | 0.266 | 0.178 | 0.589 | 0.015 | (0, 0, −5) | 0.037 | 0.336 | 0.308 | 0.008 |
| Offset unit: mm; force unit: N; torque unit: Nm. | |||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.-C.; Irube, K.; Takeda, Y. Kineto-Static Analysis and Design Optimization of a 3-DOF Wrist Rehabilitation Parallel Robot with Consideration of the Effect of the Human Limb. Machines 2021, 9, 323. https://doi.org/10.3390/machines9120323
Liu Y-C, Irube K, Takeda Y. Kineto-Static Analysis and Design Optimization of a 3-DOF Wrist Rehabilitation Parallel Robot with Consideration of the Effect of the Human Limb. Machines. 2021; 9(12):323. https://doi.org/10.3390/machines9120323
Chicago/Turabian StyleLiu, Ying-Chi, Kosuke Irube, and Yukio Takeda. 2021. "Kineto-Static Analysis and Design Optimization of a 3-DOF Wrist Rehabilitation Parallel Robot with Consideration of the Effect of the Human Limb" Machines 9, no. 12: 323. https://doi.org/10.3390/machines9120323
APA StyleLiu, Y.-C., Irube, K., & Takeda, Y. (2021). Kineto-Static Analysis and Design Optimization of a 3-DOF Wrist Rehabilitation Parallel Robot with Consideration of the Effect of the Human Limb. Machines, 9(12), 323. https://doi.org/10.3390/machines9120323