
Multi-Frequency Weak Signal Decomposition and Reconstruction of Rolling Bearing Based on Adaptive Cascaded Stochastic Resonance


Abstract
:1. Introduction
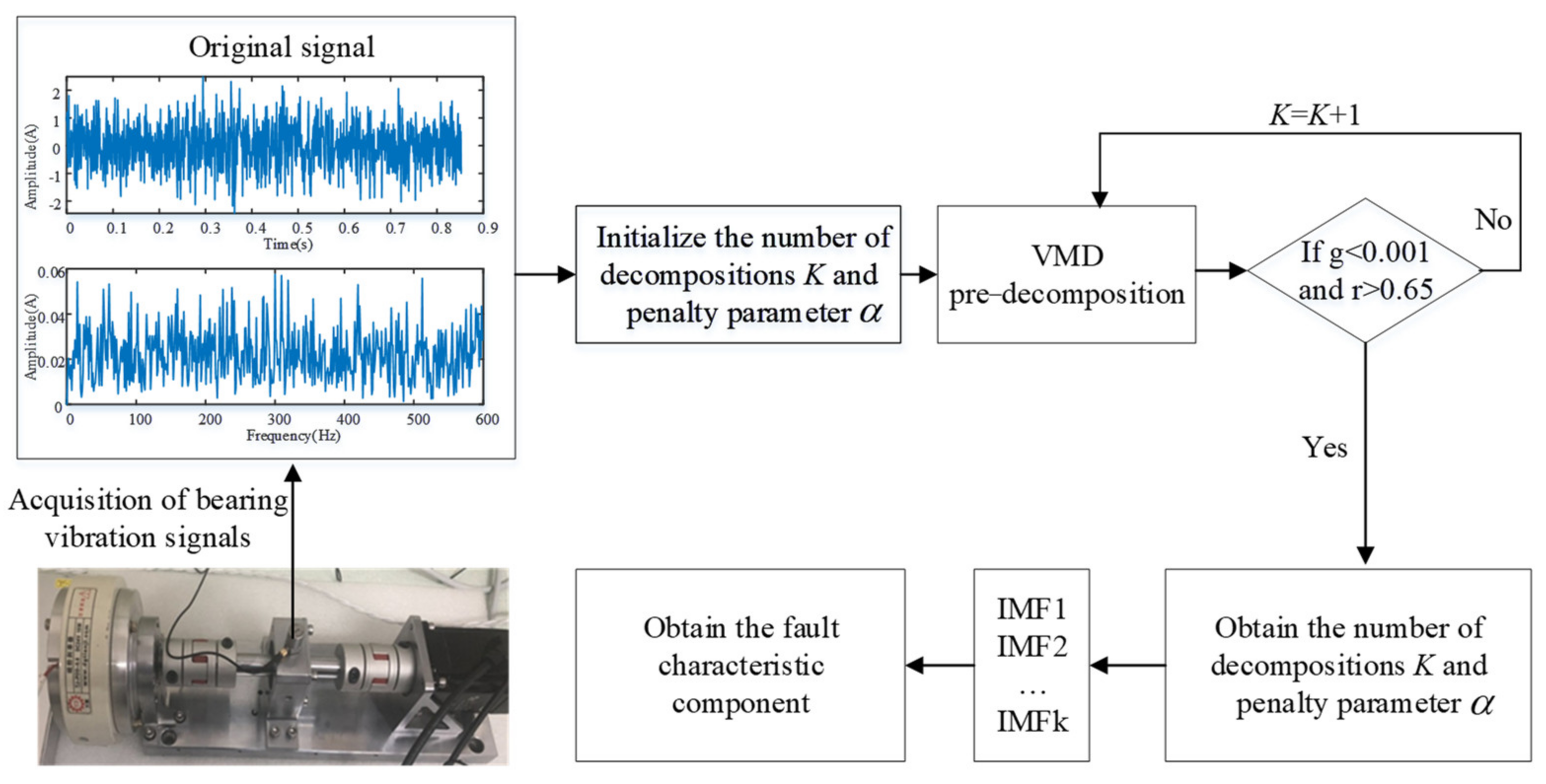
2. Variational Mode Decomposition Theory
- Initialize ;
- Execute the loop ;
- For all , update and ;
- 4.
- Stop the iteration if the following convergence conditions are met, otherwise return to step 2.
3. Multi-Frequency Weak Signal Reconstruction Based on Adaptive Cascaded Stochastic Resonance
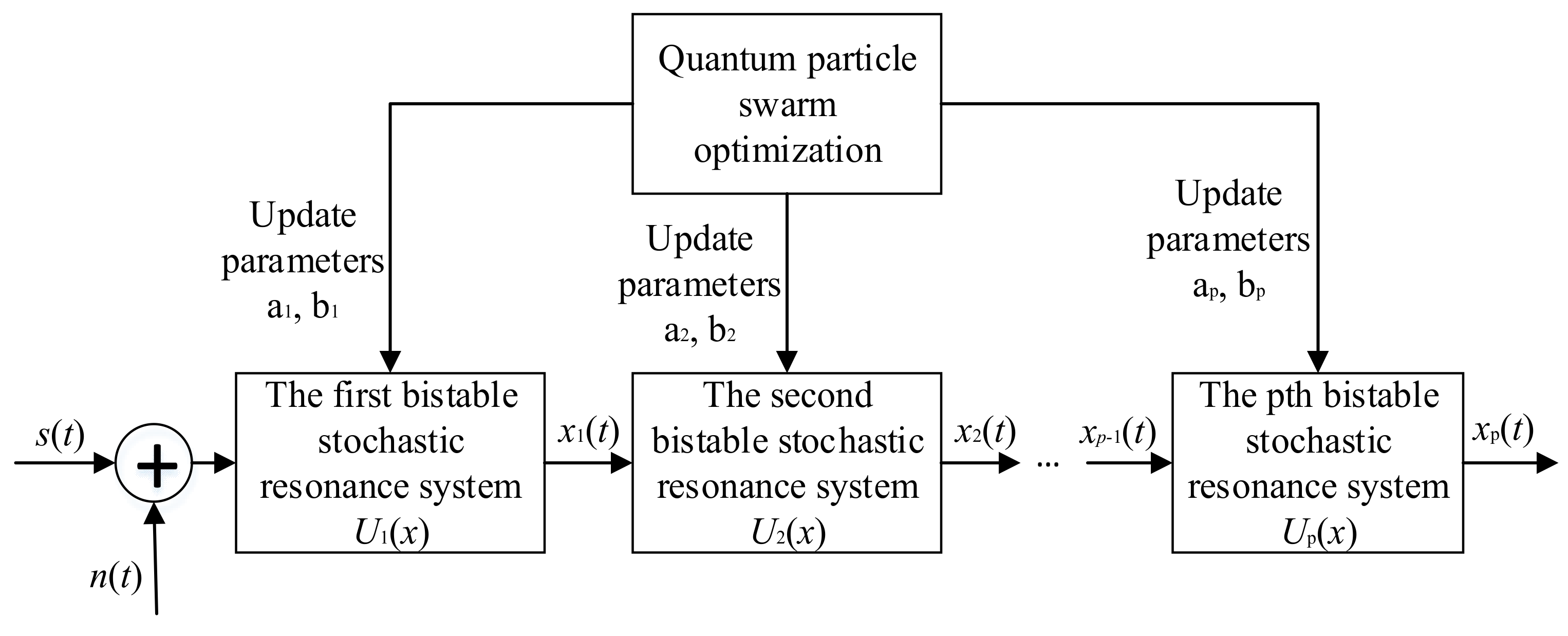
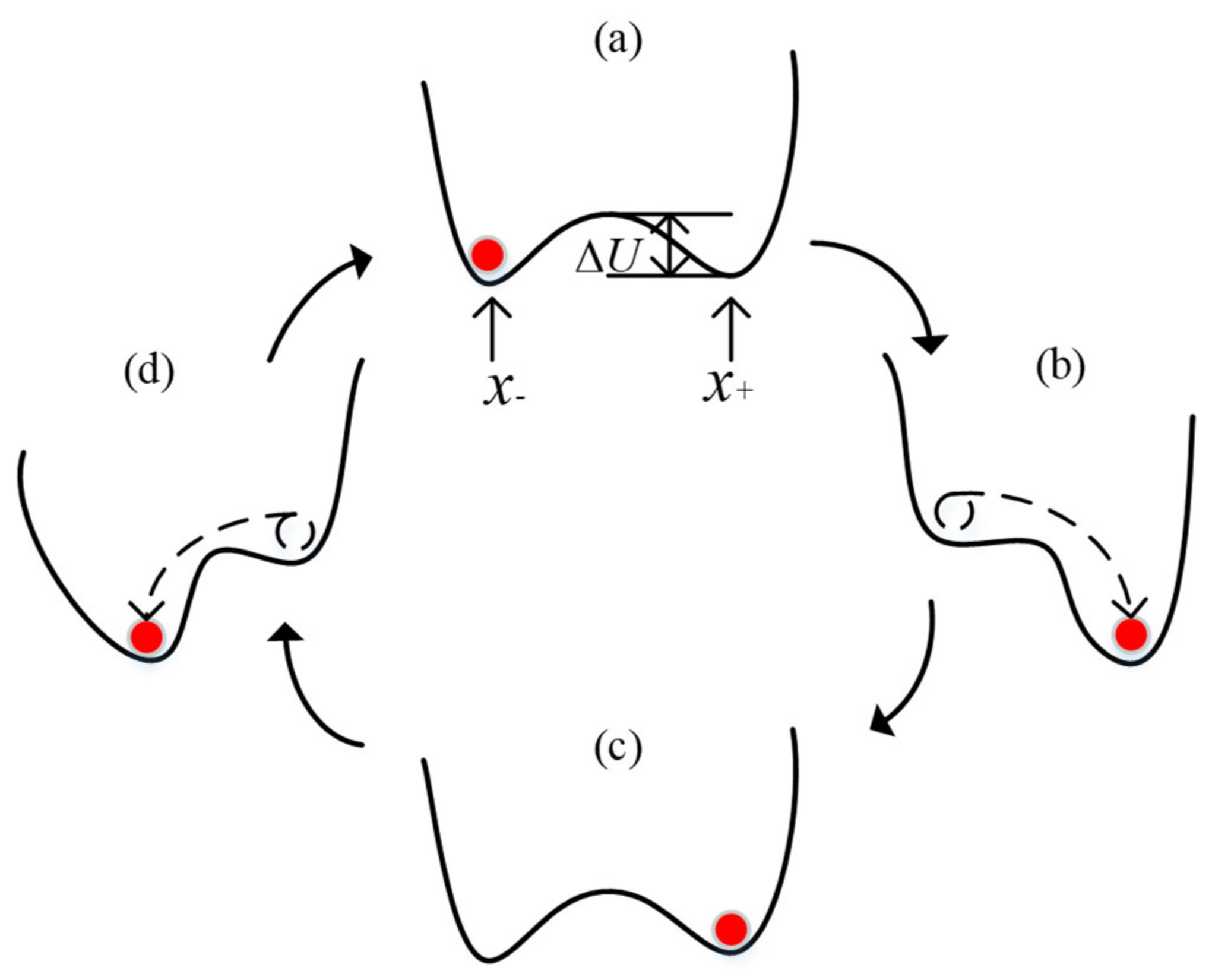
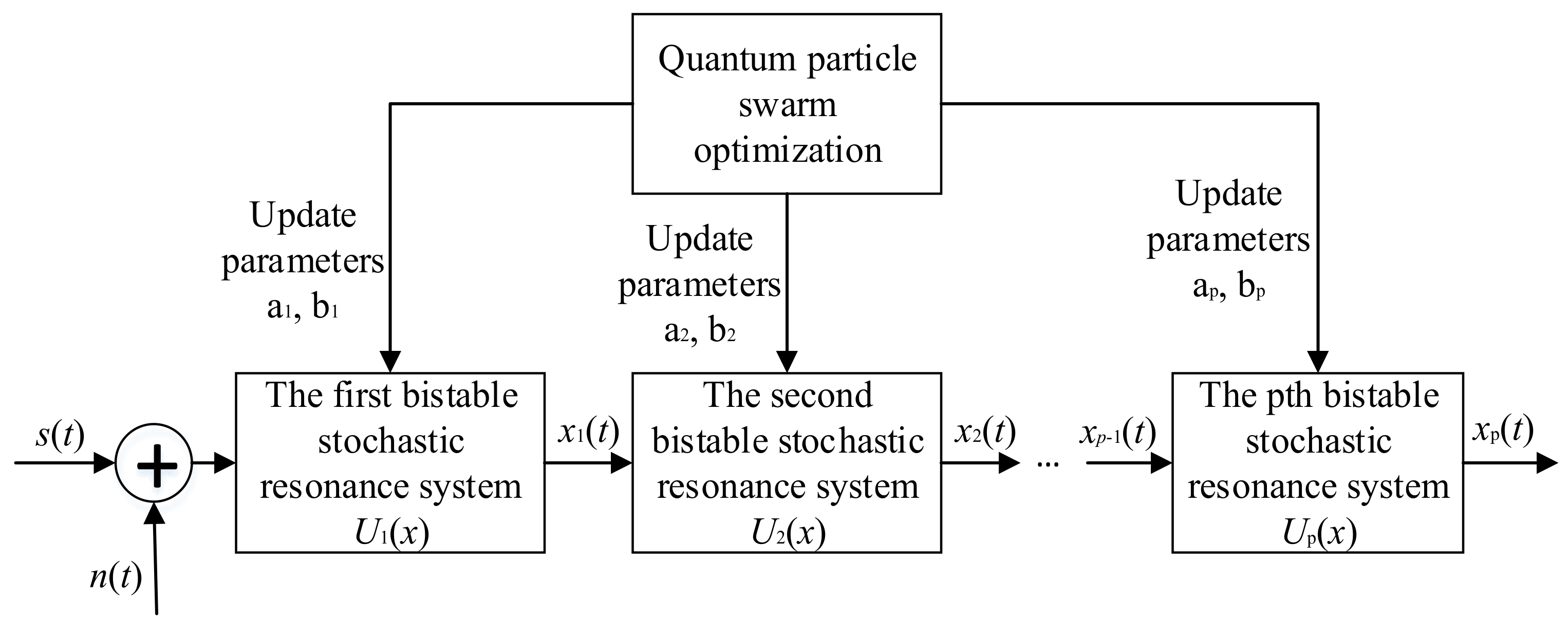
3.1. Adaptive Cascaded Stochastic Resonance Model
- Initialize the particle positions and set the number of populations, the maximum number of iterations, the dimensionality, and the search range of each dimension;
- Let ,, the adaptation value of the initial position of each particle is calculated, and the output signal-to-noise ratio corresponding to each particle is calculated according to the adaptation function, the corresponding signal-to-noise ratio value of the first generation of particles is taken as the local optimum of a single particle, and the maximum value of which is taken as the global optimum;
- The particle position and velocity are updated according to the global optimum value to obtain the next generation of particles, and if the obtained local optimum solution or global optimum solution of a single particle is better than the previous generation of particles, the velocity and position of the corresponding single particle are updated, and the local and global optimum solutions are updated;
- After reaching the maximum number of iterations, the optimal parameters are obtained according to the positions of the final particles, and the values of are fixed, and the optimal solutions of are searched again in the range around ;
- The parameters of the -level cascaded bistable stochastic resonance system are calculated and the output signal is obtained.
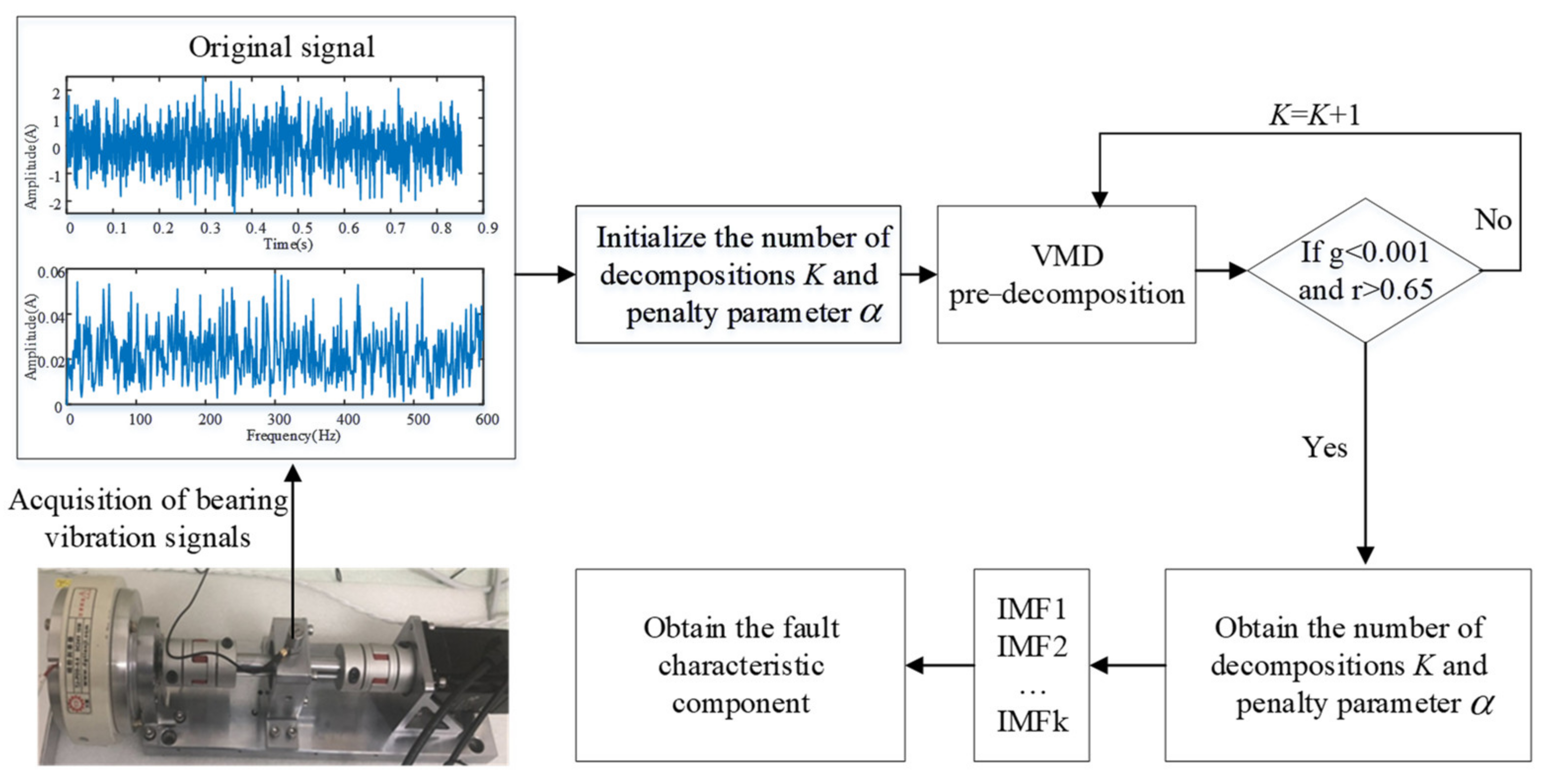
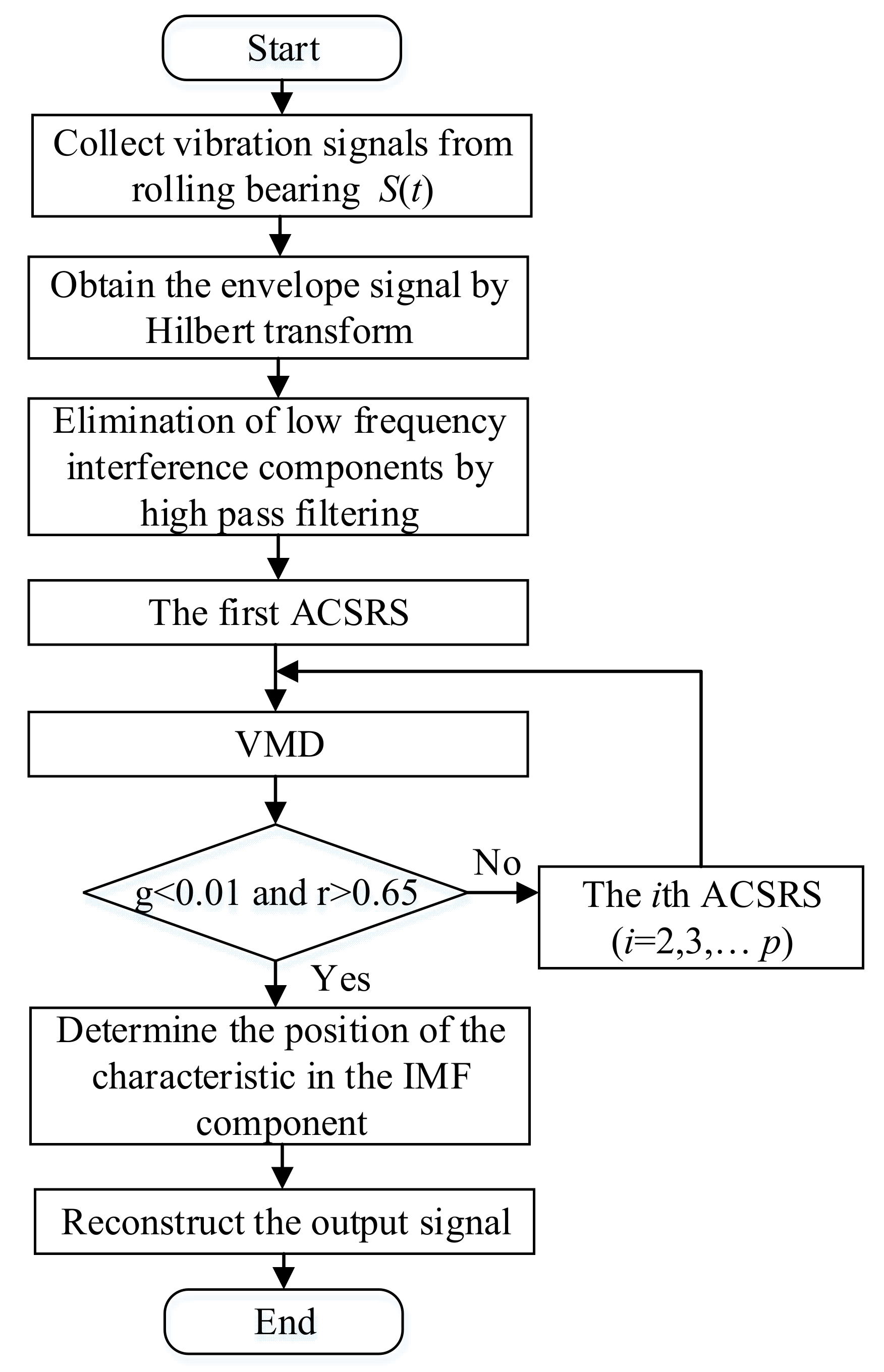
3.2. Decomposition and Reconstruction of Multi-Frequency Weak Signals of Rolling Bearings
- Hilbert transform of rolling bearing vibration signal to obtain the envelope signal;
- High-pass filtering of the envelope signal eliminates the interference of low-frequency components to the response of the stochastic resonance system;
- Inputting the high-pass filtered signal into the ACSRS for signal enhancement processing;
- Adaptive optimization of the parameters in the cascaded stochastic resonance using quantum particle swarm optimization;
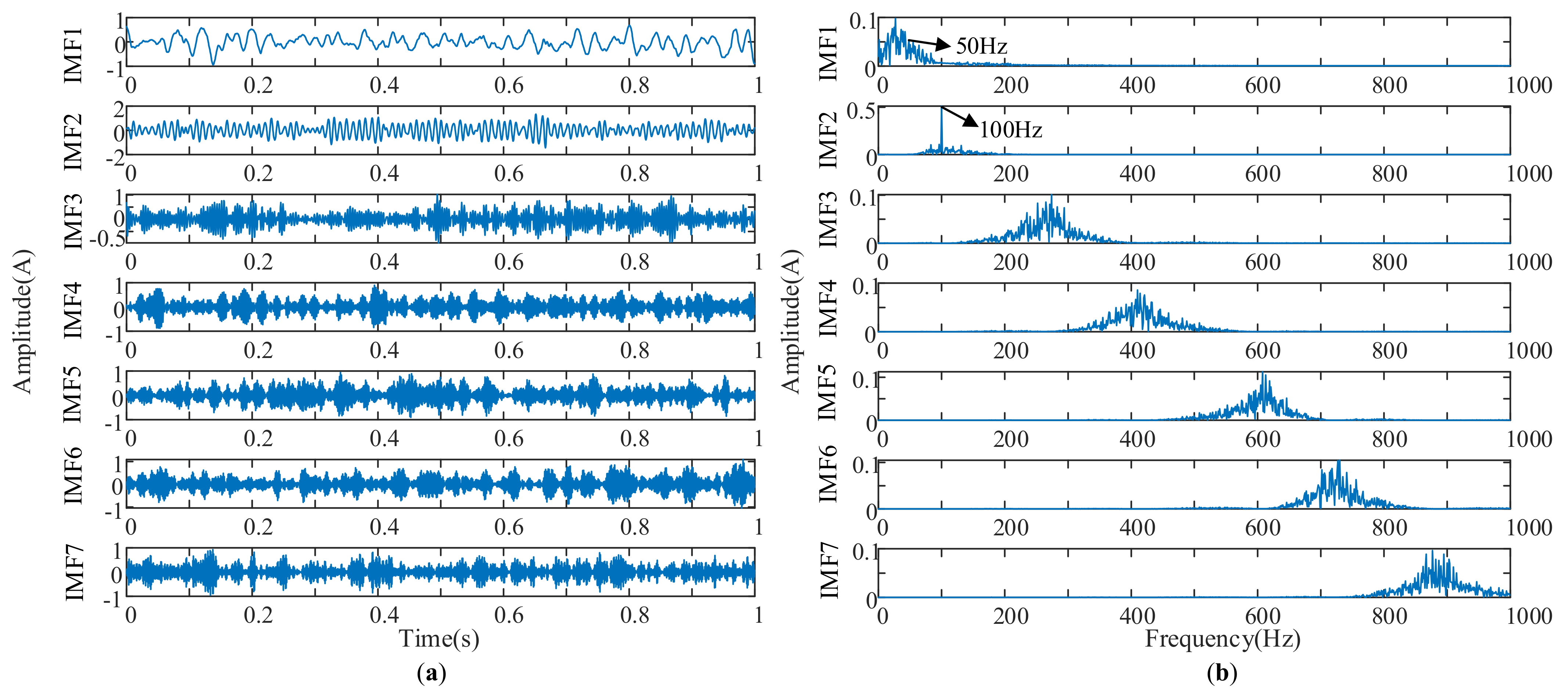
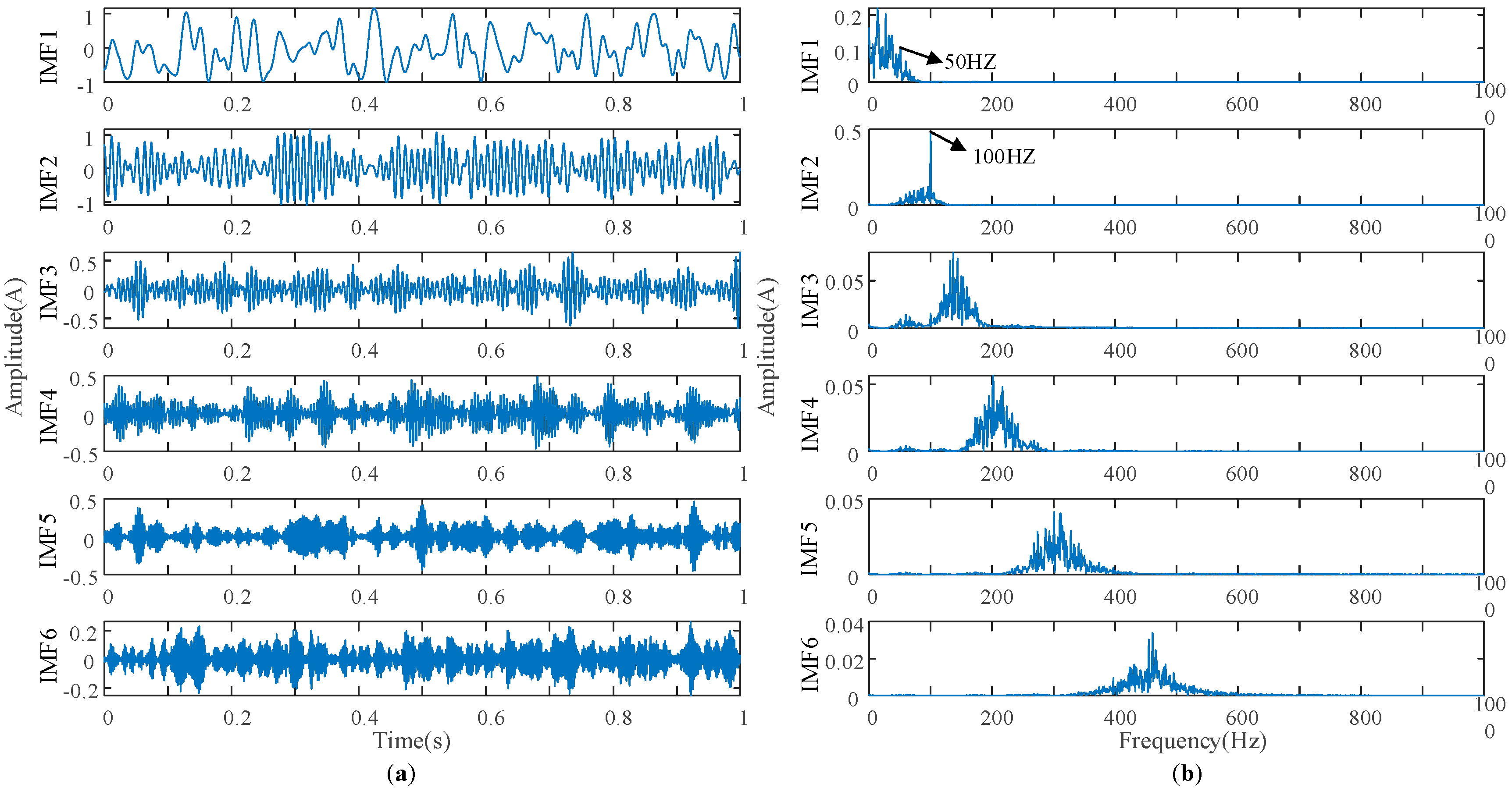
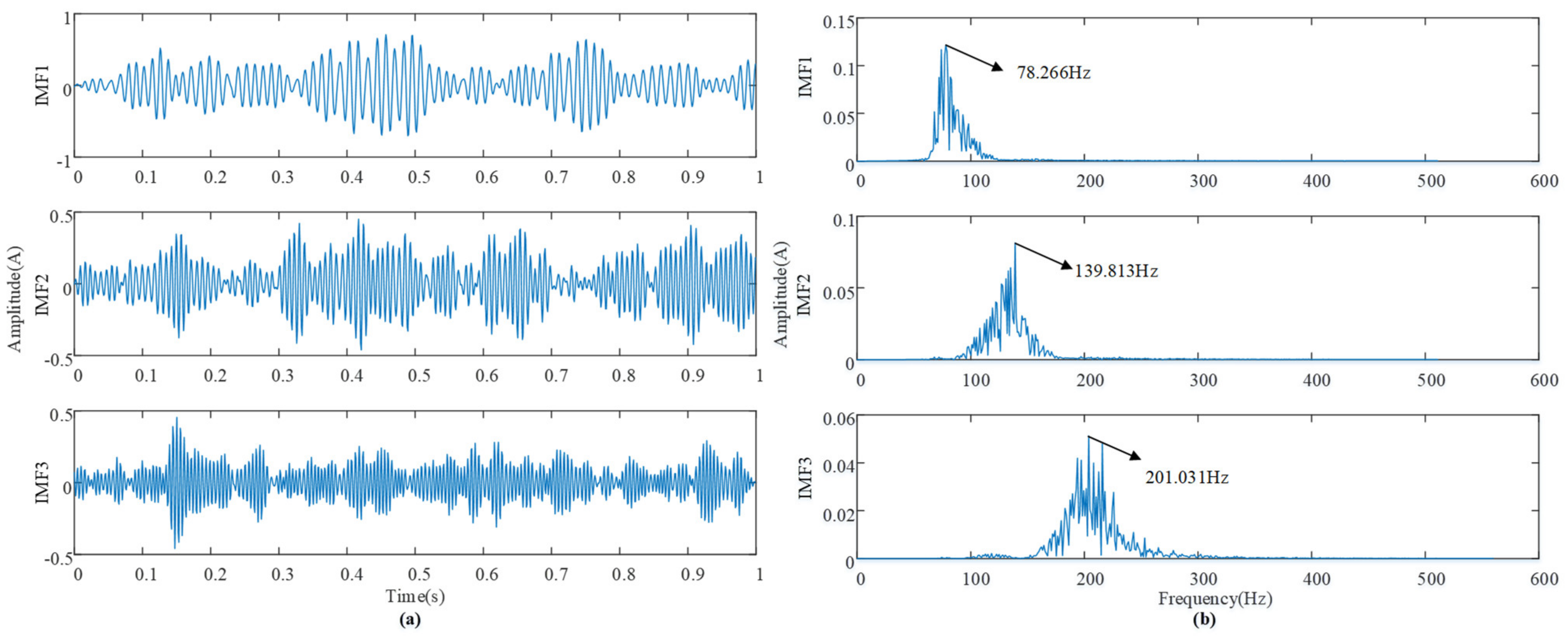
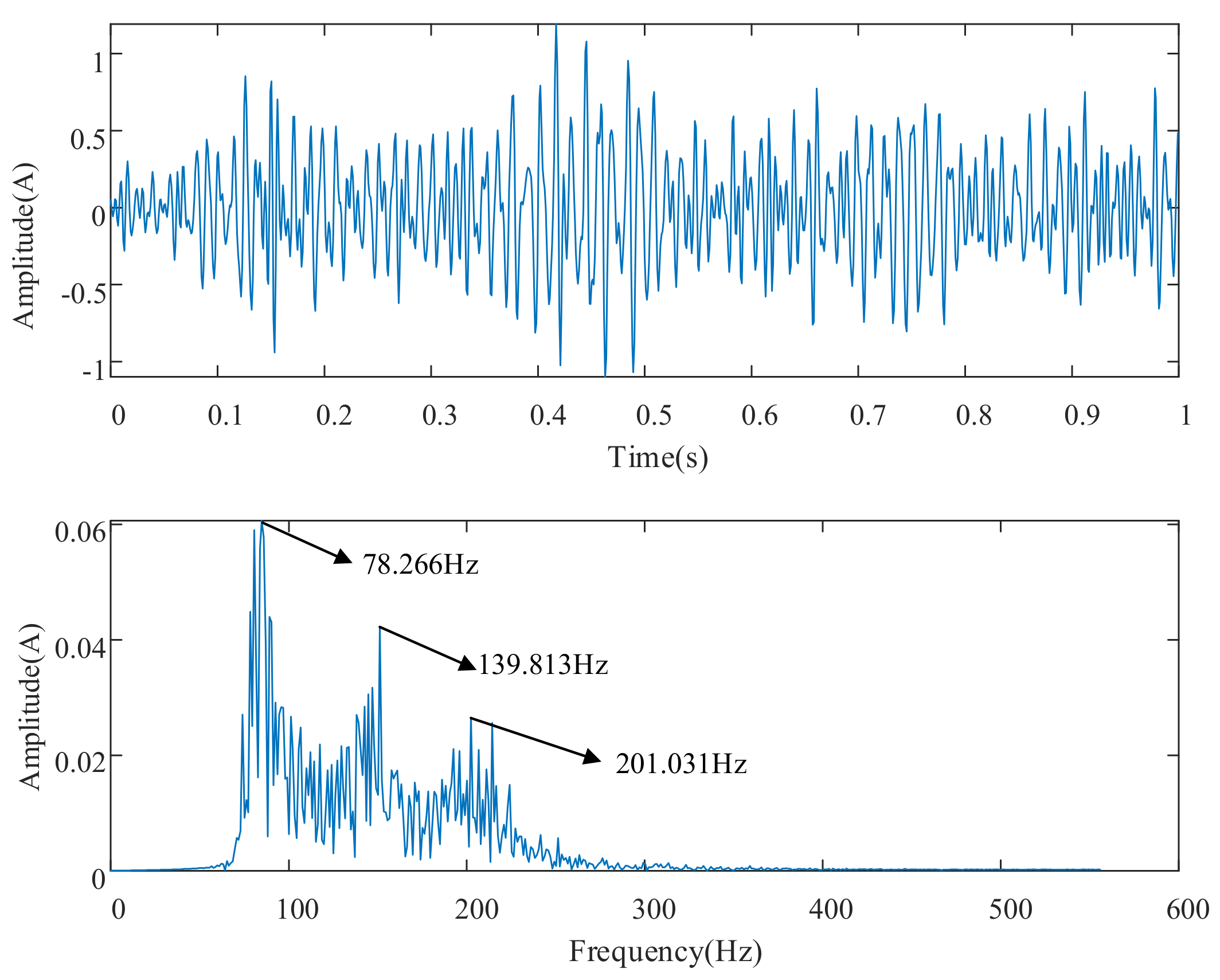
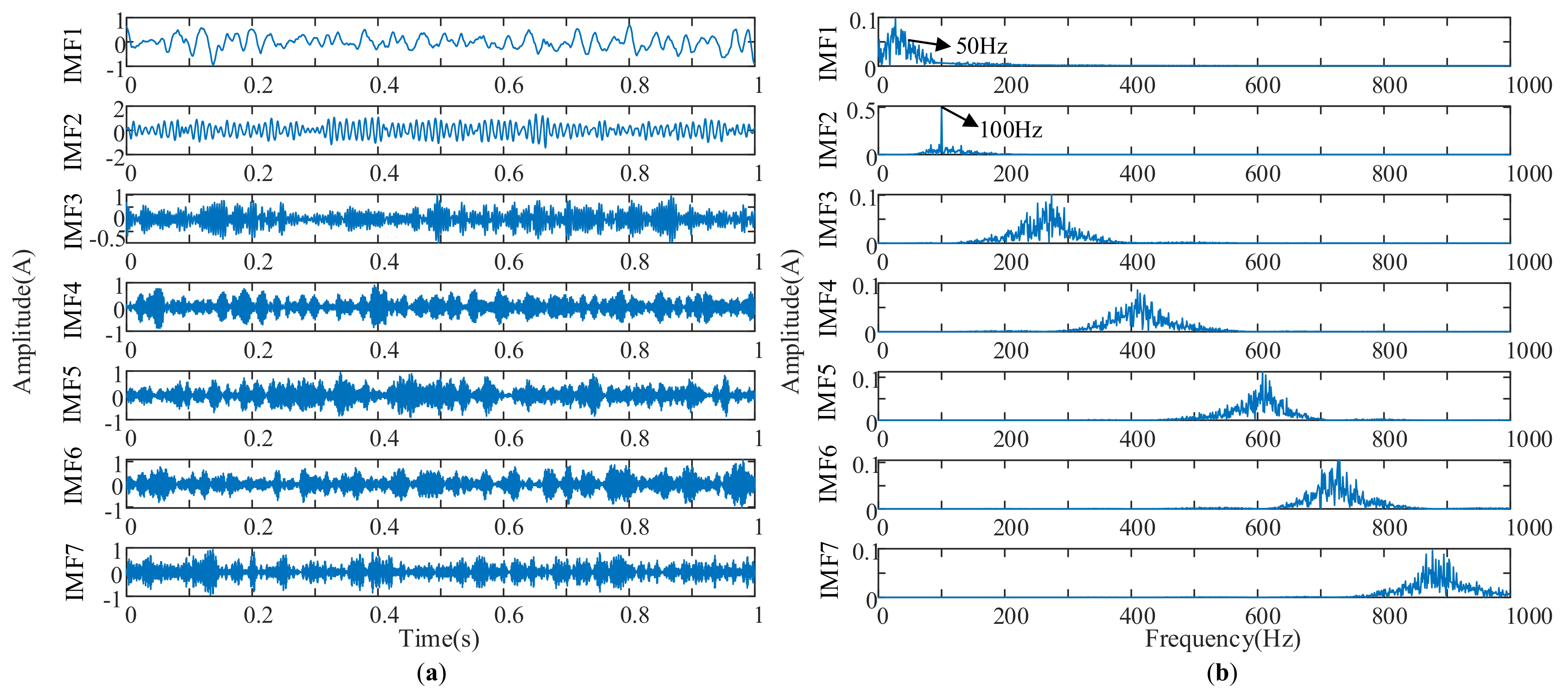
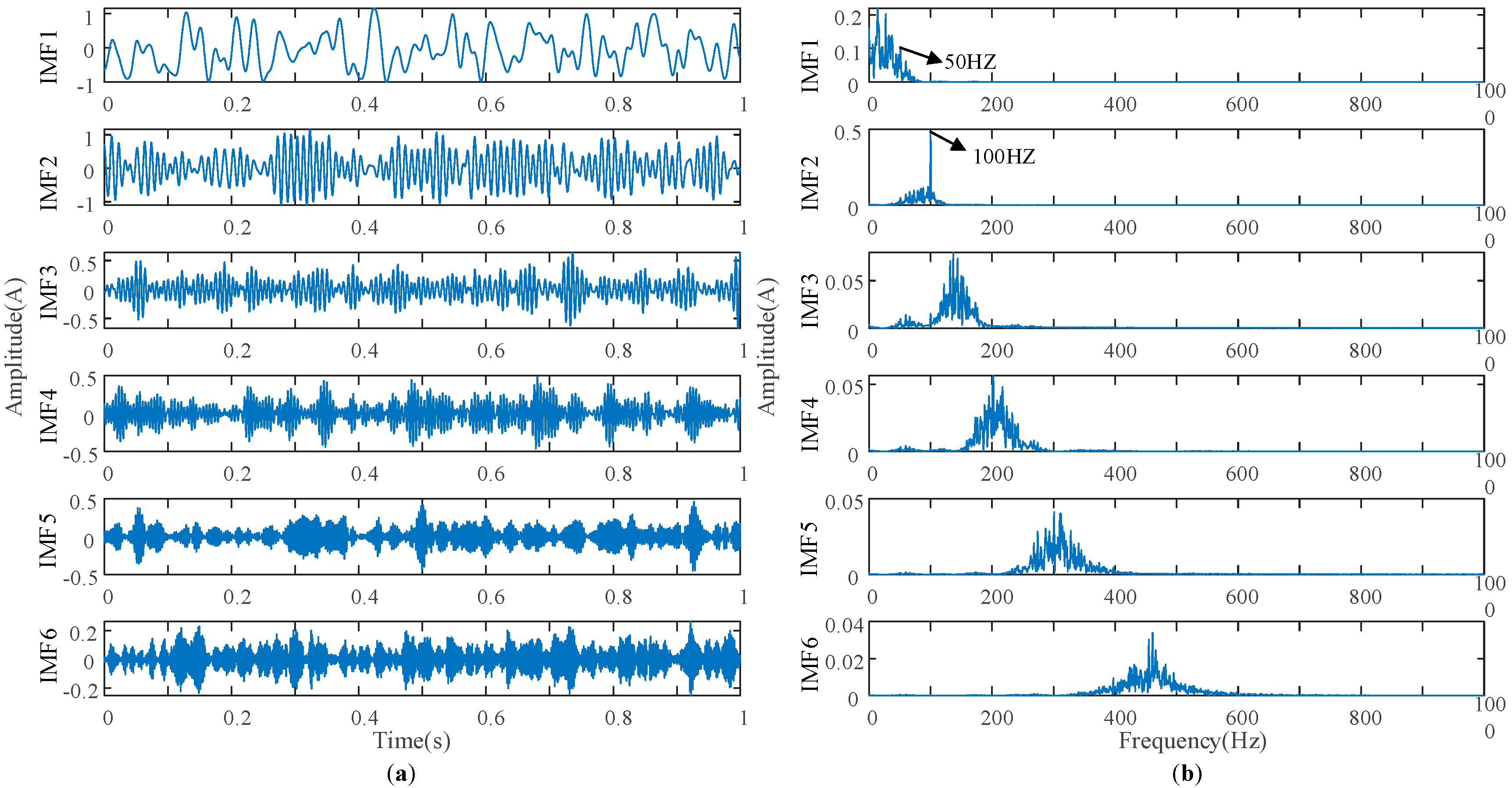
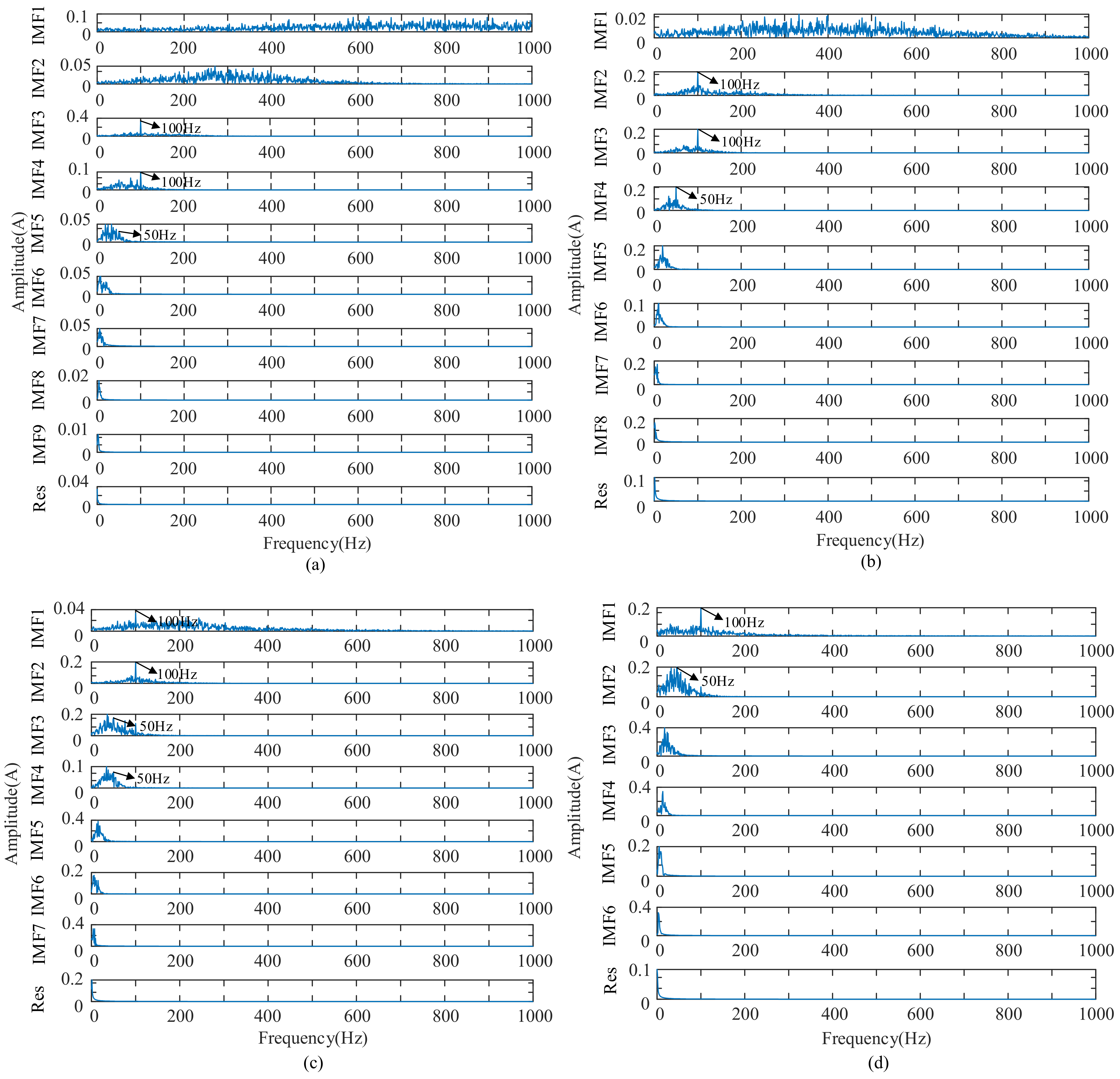
- The VMD decomposition is performed on the output signal of the first ACSRS to determine the position of the characteristic frequency in the IMF component. The algorithm stops if all the high-frequency noise energy is transferred to the low-frequency modal component, g < 0.001, and the correlation r > 0.65;
- If g > 0.001 or r < 0.65 then continue with the VMD decomposition of the enhanced signal from the next level of the ACSRS until the condition is satisfied;
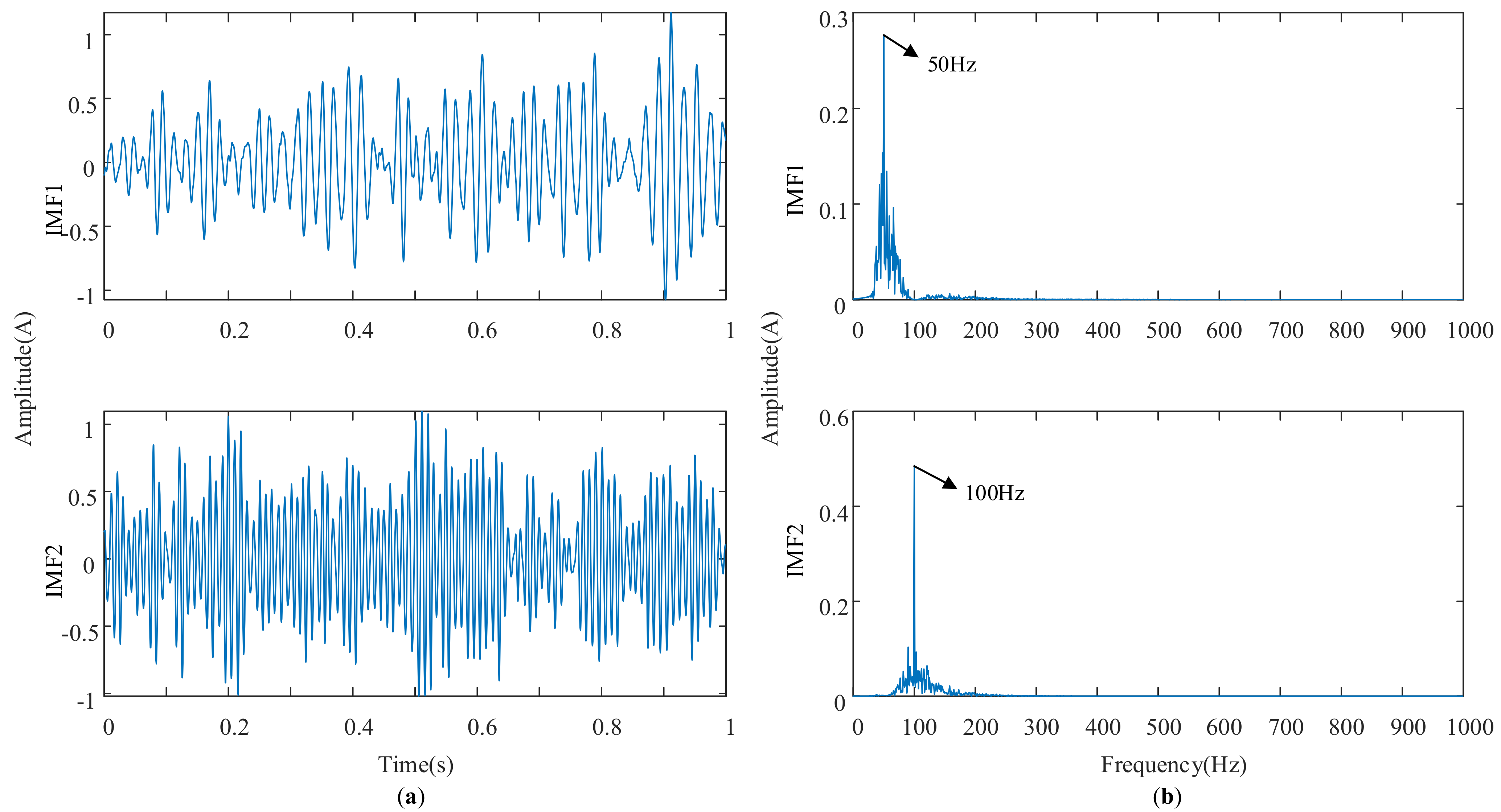
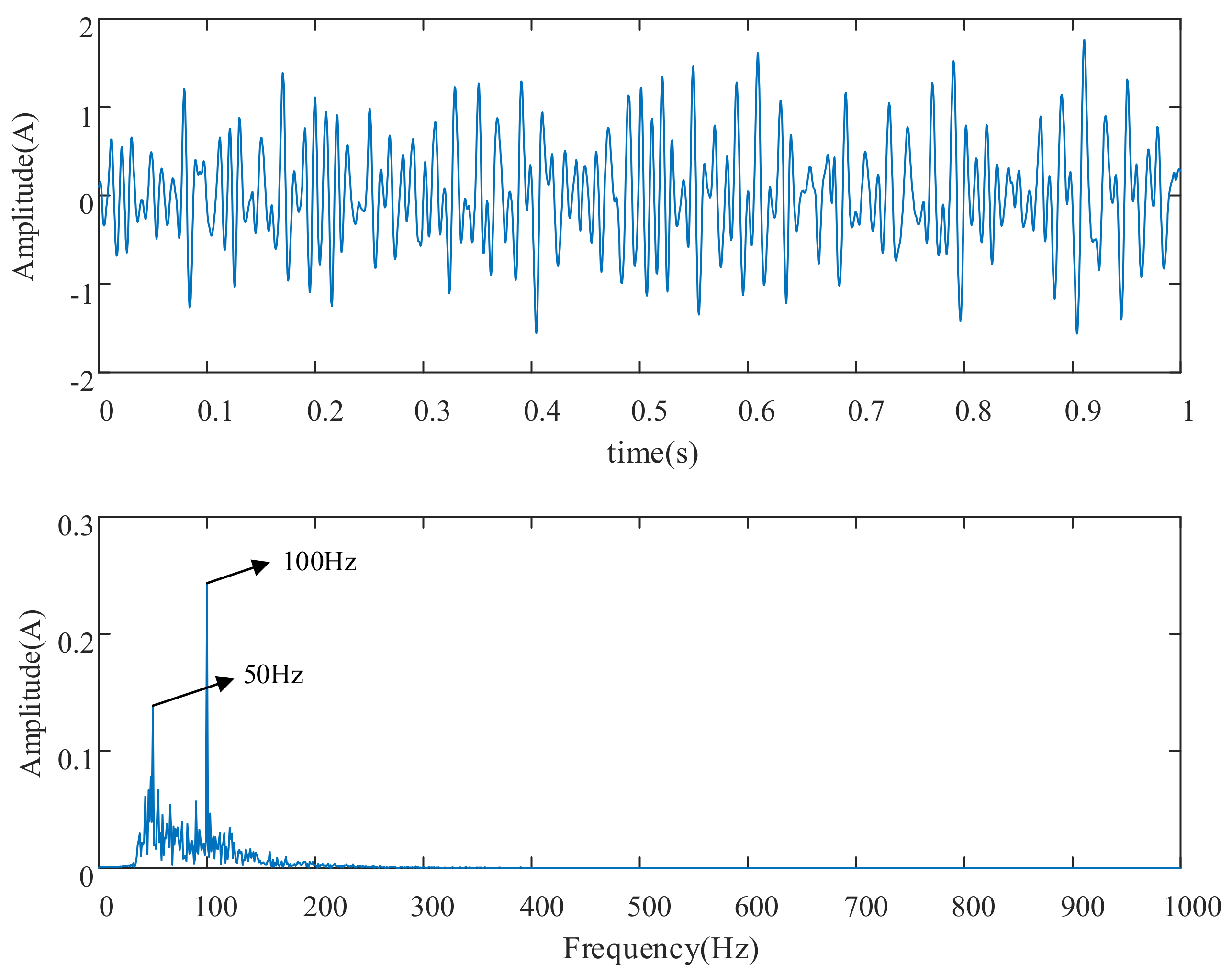
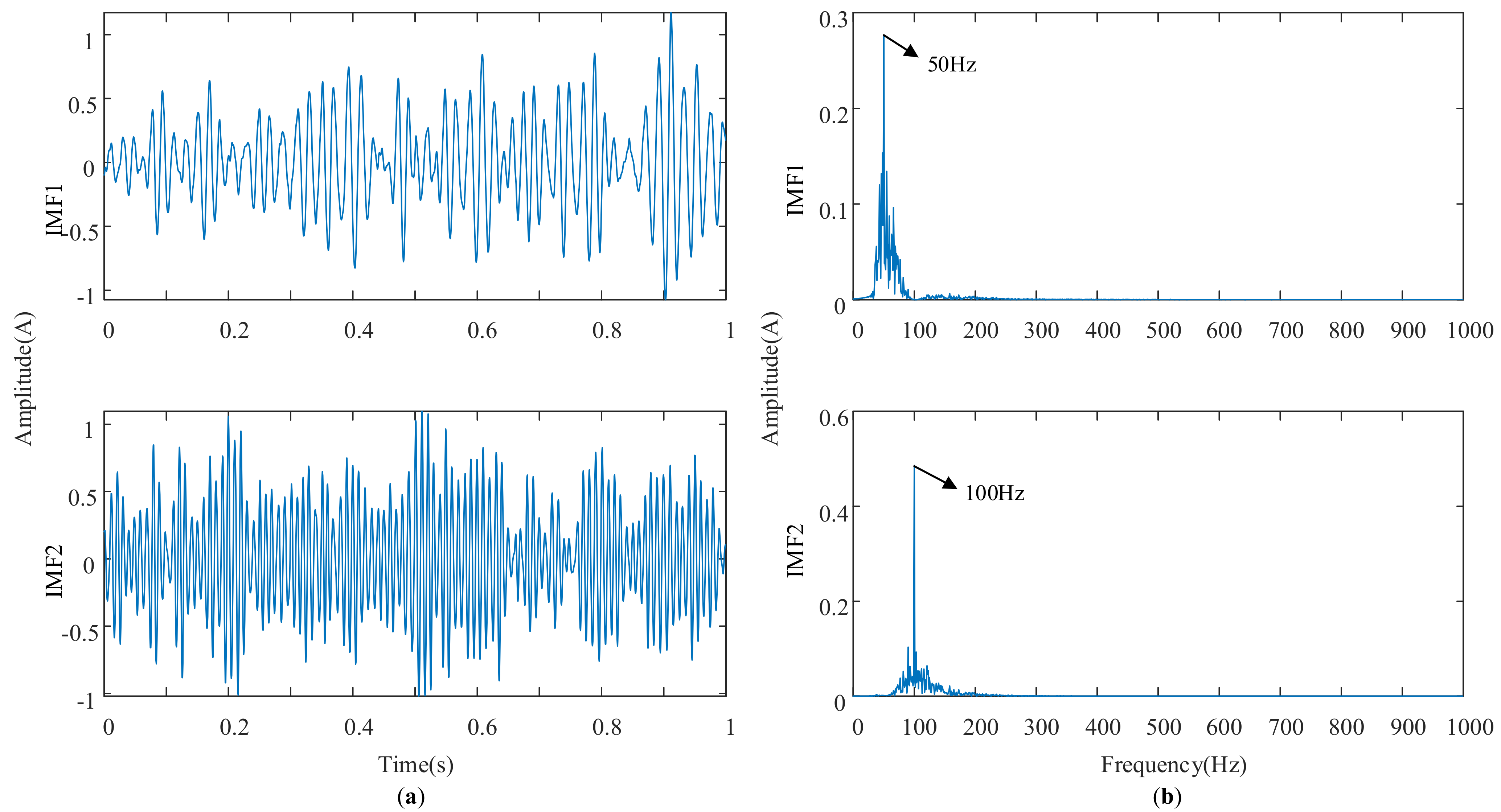
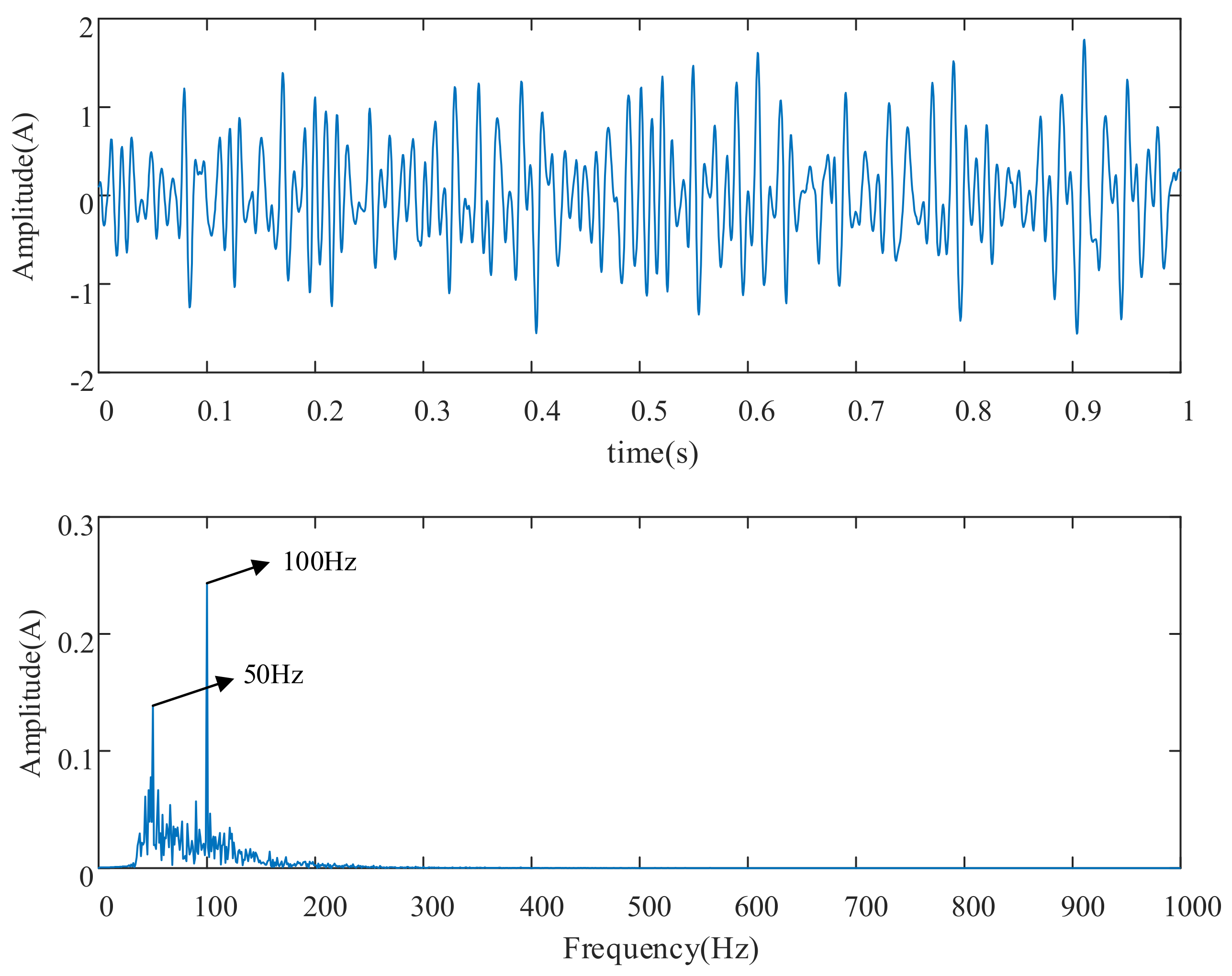
- Based on the extracted feature signal, the enhanced signal is reconstructed to achieve multi-frequency weak signal fault detection.
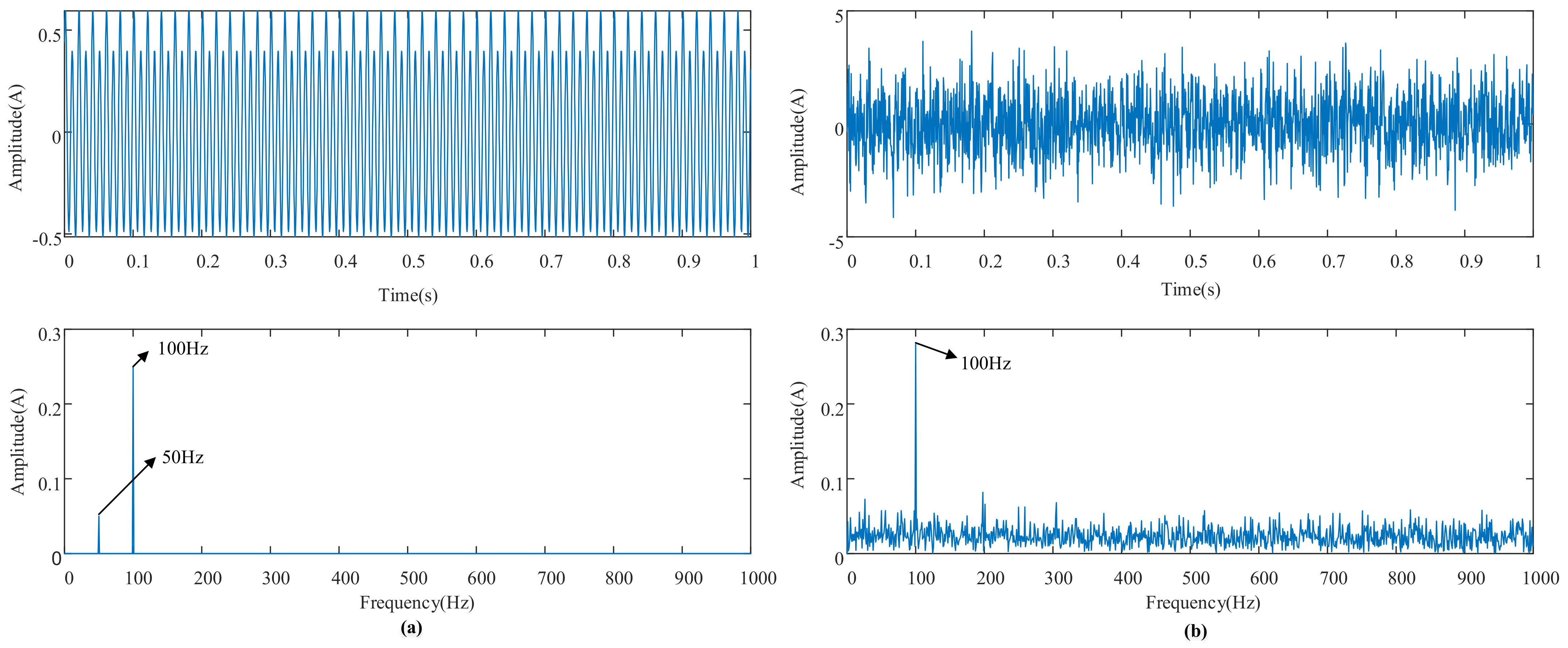
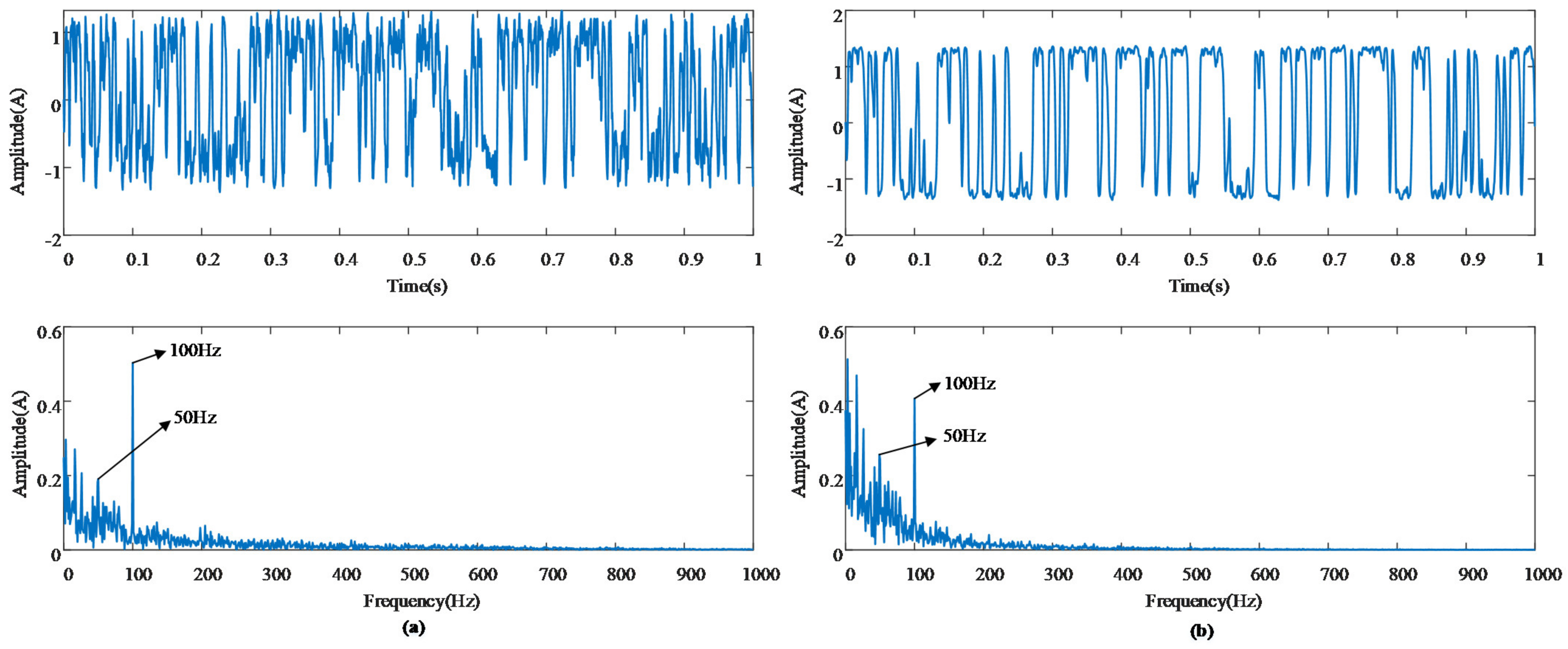
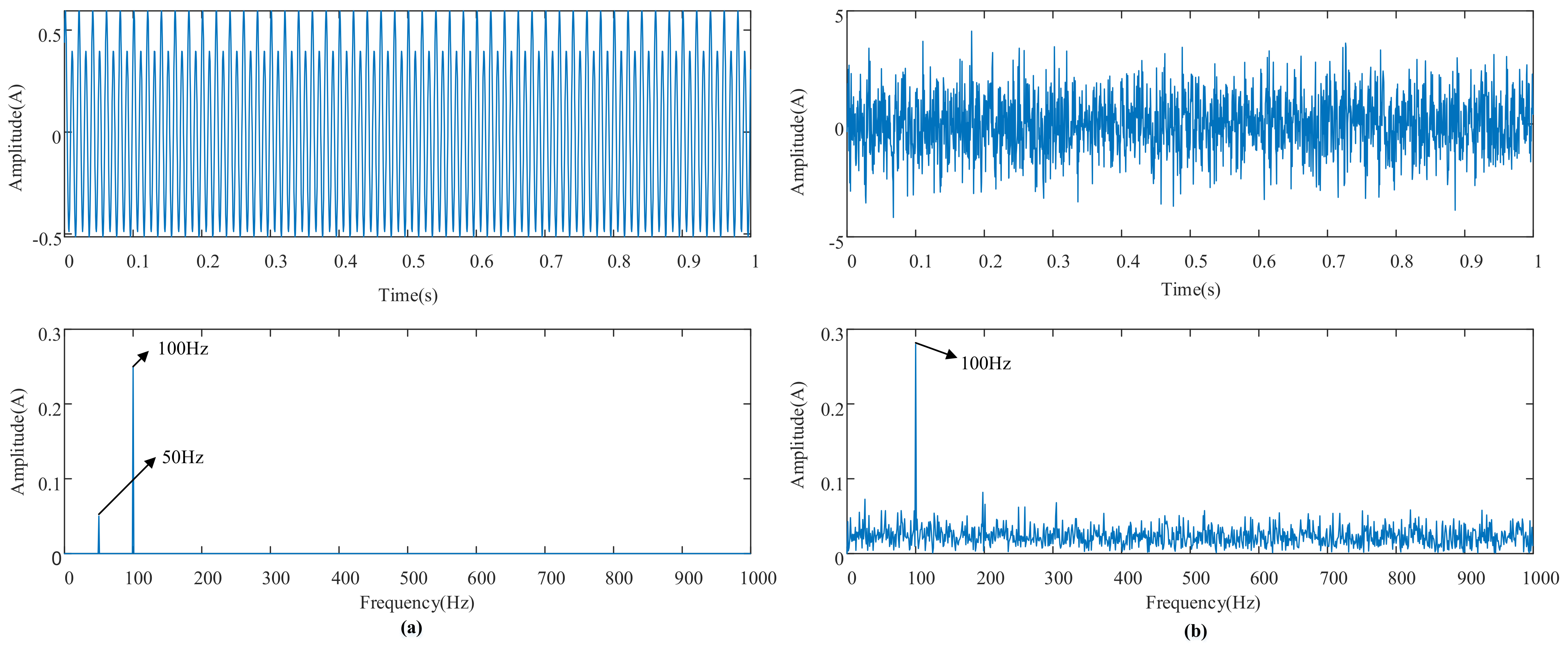
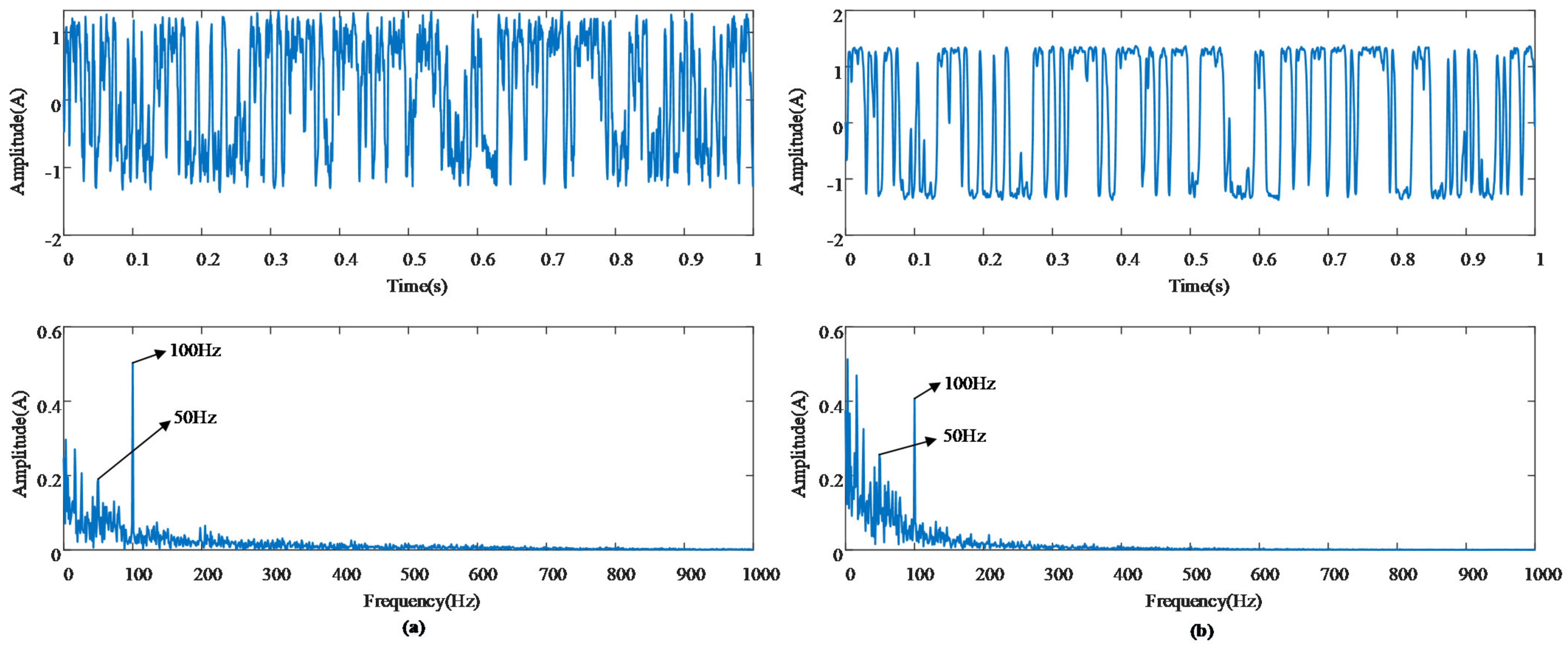
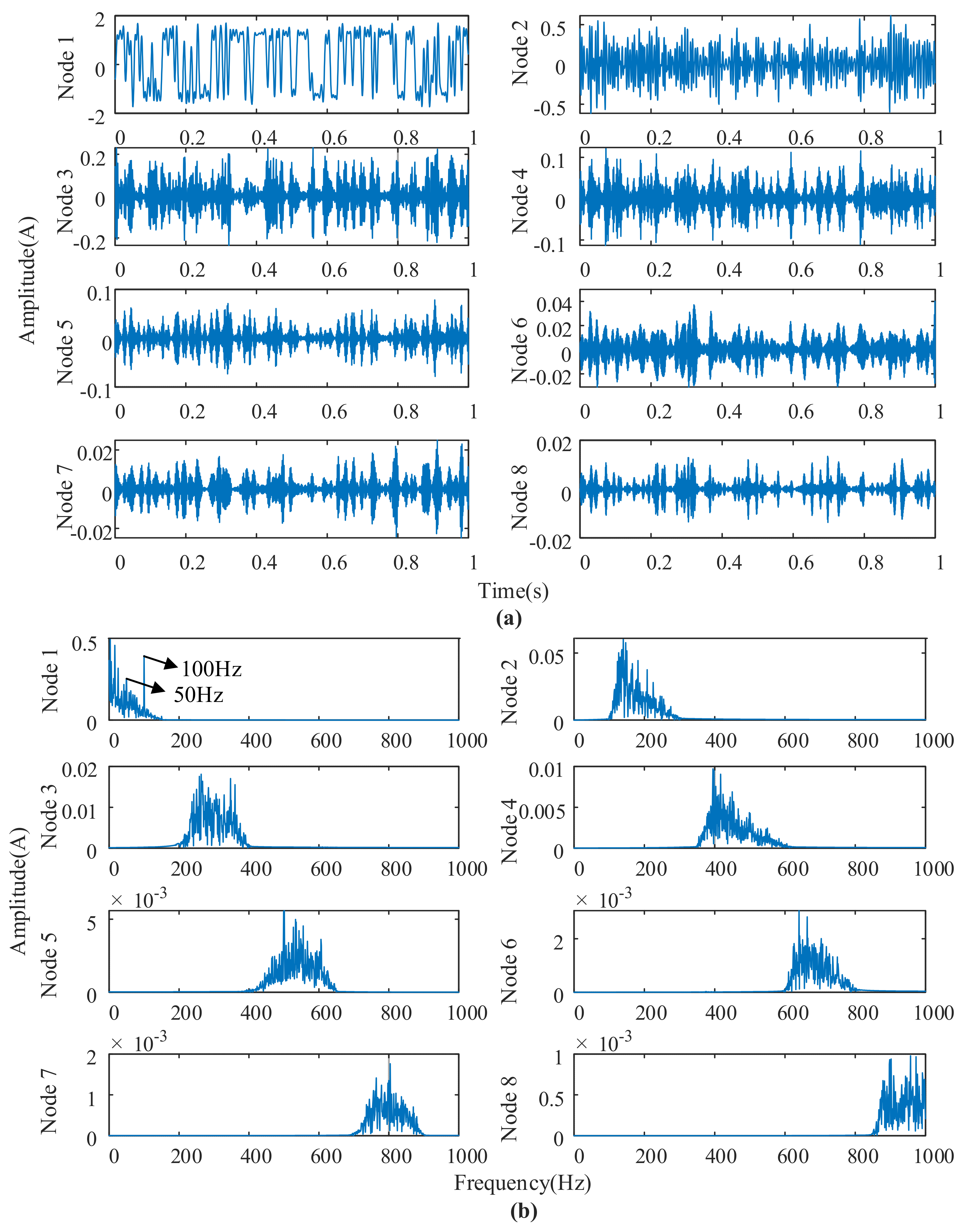
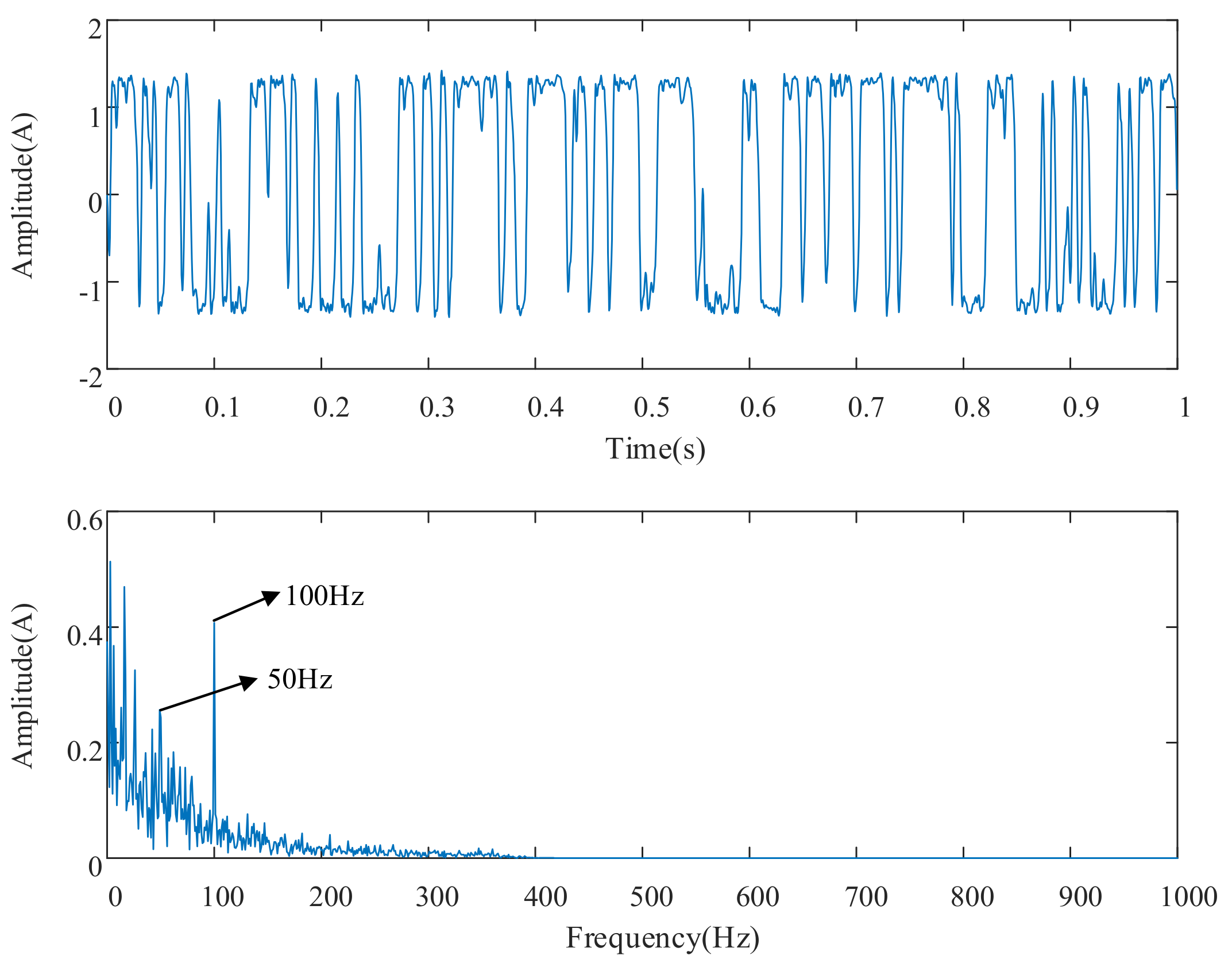
3.3. Simulation Experimental Verification
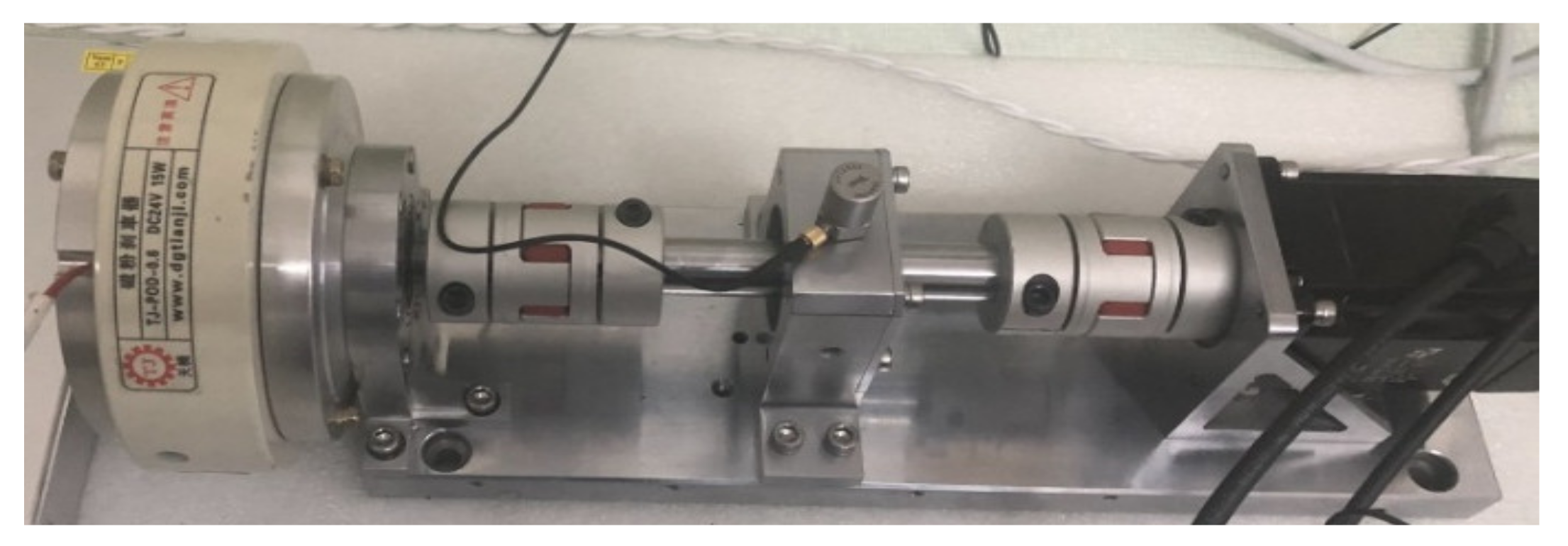
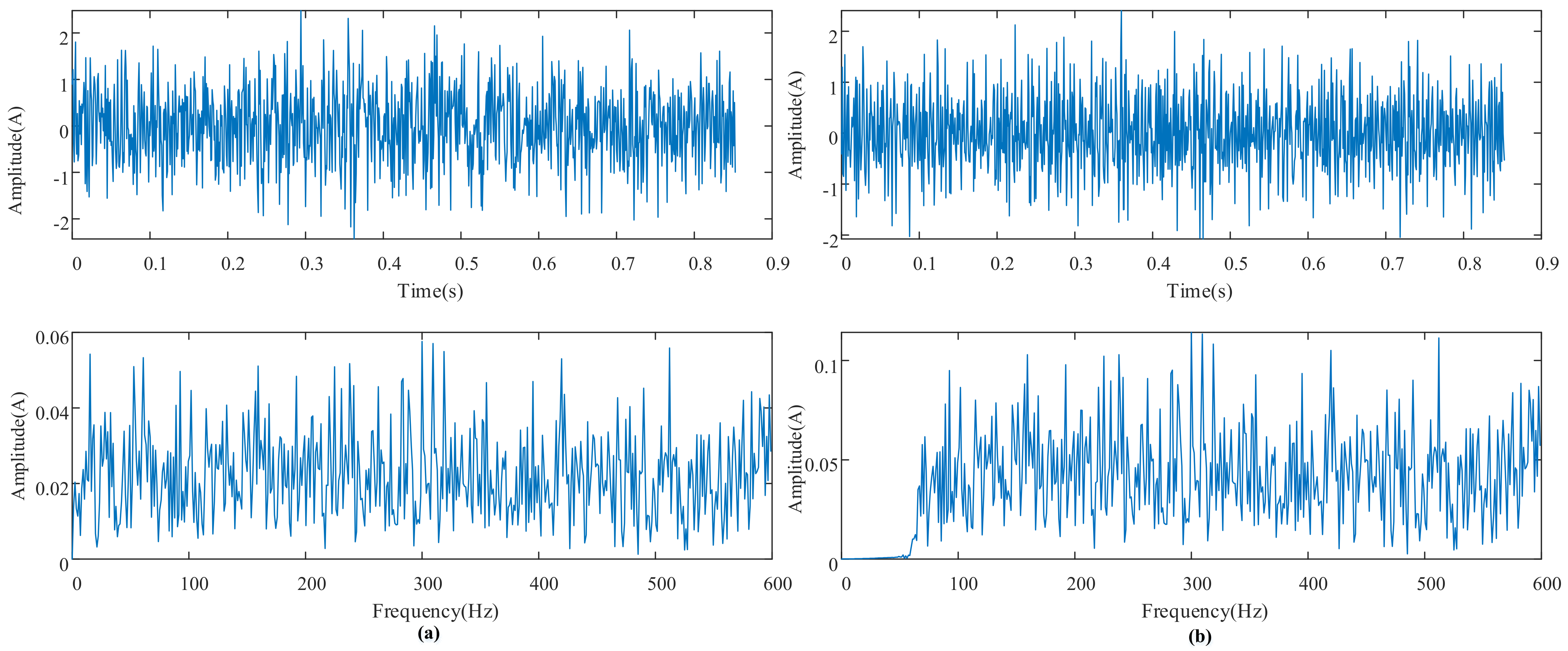
4. Experimental Validation and Analysis of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| WT | Wavelet transform |
| IRF | Iterative random forest |
| MIGA | Multi-island genetic algorithm |
| IMF | Intrinsic mode functions |
| EMD | Empirical mode decomposition |
| EEMD | Ensemble empirical mode decomposition |
| CEEMDAN | Complete ensemble empirical mode decomposition with adaptive noise |
| VMD | Variational mode decomposition |
| SR | Stochastic resonance |
| ACSRS | Adaptive cascaded stochastic resonance system |
| CMSRS | Cascaded multi-stable stochastic resonance system |
| QPSO | Quantum particle swarm algorithm |
References
- Rai, A.; Upadhyay, S.H. A review on signal processing techniques utilized in the fault diagnosis of rolling element bearings. Tribol. Int. 2016, 96, 289–306. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, J.; Wang, H.; Jiang, J. Early fault diagnosis for rolling bearing based on noise-assisted signal feature enhancement. J. Vib. Shock 2020, 39, 66–73. [Google Scholar]
- Yuan, H.; Wu, N.; Chen, X. Mechanical Compound Fault Analysis Method Based on Shift Invariant Dictionary Learning and Improved FastICA Algorithm. Machines 2021, 9, 144. [Google Scholar] [CrossRef]
- Osman, S.; Wang, W. A Morphological Hilbert-Huang Transform Technique for Bearing Fault Detection. IEEE Trans. Instrum. Meas. 2016, 65, 2646–2656. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Zan, T.; Pang, Z.; Wang, M.; Gao, X. Research on Early Fault Diagnosis of Rolling Bearing Based on VMD. In Proceedings of the 6th IEEE International Conference on Mechanical, Automotive and Materials Engineering (CMAME), Hong Kong, China, 10–12 October 2018; pp. 41–45. [Google Scholar]
- Chen, J.; Li, Z.; Pan, J.; Chen, G.; Zi, Y.; Yuan, J.; Chen, B.; He, Z. Wavelet transform based on inner product in fault diagnosis of rotating machinery: A review. Mech. Syst. Signal Process. 2016, 70–71, 1–35. [Google Scholar] [CrossRef]
- Song, Y.; Zeng, S.; Ma, J.; Guo, J. A fault diagnosis method for roller bearing based on empirical wavelet transform decomposition with adaptive empirical mode segmentation. Measurement 2018, 117, 266–276. [Google Scholar] [CrossRef]
- Guo, W.; Tse, P.W.; Djordjevich, A. Faulty bearing signal recovery from large noise using a hybrid method based on spectral kurtosis and ensemble empirical mode decomposition. Measurement 2012, 45, 1308–1322. [Google Scholar] [CrossRef]
- Ma, B.; Zhang, T. Single-channel blind source separation for vibration signals based on TVF-EMD and improved SCA. IET Signal Process. 2020, 14, 259–268. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble Empirical Mode Decomposition: A Noise-Assisted Data Analysis Method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Lei, Y.G.; Liu, Z.Y.; Ouazri, J.; Lin, J. A fault diagnosis method of rolling element bearings based on CEEMDAN. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 1804–1815. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, A. Research on the Fault Diagnosis Method for Rolling Bearings Based on Improved VMD and Automatic IMF Acquisition. Shock. Vib. 2020, 2020, 6216903. [Google Scholar]
- Li, H.; Liu, T.; Wu, X.; Chen, Q. An optimized VMD method and its applications in bearing fault diagnosis. Measurement 2020, 166, 108185. [Google Scholar] [CrossRef]
- Yi, C.C.; Lv, Y.; Dang, Z. A Fault Diagnosis Scheme for Rolling Bearing Based on Particle Swarm Optimization in Variational Mode Decomposition. Shock Vib. 2016, 2016, 9372691. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Jiang, Z.N.; Feng, K. Research on variational mode decomposition in rolling bearings fault diagnosis of the multistage centrifugal pump. Mech. Syst. Signal Process. 2017, 93, 460–493. [Google Scholar] [CrossRef] [Green Version]
- Gong, T.K.; Yuan, X.H.; Wang, X.; Yuan, Y.B.; Zhang, B.Q. Fault diagnosis for rolling element bearing using variational mode decomposition and l(1) trend filtering. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2020, 234, 116–128. [Google Scholar] [CrossRef]
- Qin, X.W.; Guo, J.J.; Dong, X.G.; Guo, Y. The Fault Diagnosis of Rolling Bearing Based on Variational Mode Decomposition and Iterative Random Forest. Shock Vib. 2020, 2020, 1576150. [Google Scholar] [CrossRef]
- Zhang, C.G.; Wang, Y.; Deng, W. Fault Diagnosis for Rolling Bearings Using Optimized Variational Mode Decomposition and Resonance Demodulation. Entropy 2020, 22, 739. [Google Scholar]
- Liang, T.; Lu, H.; Sun, H.X. Application of Parameter Optimized Variational Mode Decomposition Method in Fault Feature Extraction of Rolling Bearing. Entropy 2021, 23, 520. [Google Scholar] [CrossRef]
- Roberto, B.; Alfonso, S.; Angelo, V. The mechanism of stochastic resonance. J. Phys. A Math. Gen. 1981, 14, L453. [Google Scholar]
- Lu, S.; He, Q.; Wang, J. A review of stochastic resonance in rotating machine fault detection. Mech. Syst. Signal Process. 2019, 116, 230–260. [Google Scholar] [CrossRef]
- Wang, S.; Niu, P.J.; Guo, Y.F.; Wang, F.Z.; Li, W.X.; Shi, H.; Han, S.Z. Early diagnosis of bearing faults using decomposition and reconstruction stochastic resonance system. Measurement 2020, 158, 107709. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Xie, P. A new adaptive cascaded stochastic resonance method for impact features extraction in gear fault diagnosis. Measurement 2016, 91, 499–508. [Google Scholar] [CrossRef]
- Shi, P.; An, S.; Li, P.; Han, D. Signal feature extraction based on cascaded multi-stable stochastic resonance denoising and EMD method. Measurement 2016, 90, 318–328. [Google Scholar] [CrossRef]
- Liu, J.; Leng, Y.; Lai, Z.; Fan, S. Multi-Frequency Signal Detection Based on Frequency Exchange and Re-Scaling Stochastic Resonance and Its Application to Weak Fault Diagnosis. Sensors 2018, 18, 1325. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Wang, F.; Wang, S.; Li, G. Detection of multi-frequency weak signals with adaptive stochastic resonance system. Chin. J. Phys. 2018, 56, 994–1000. [Google Scholar] [CrossRef]
- Gong, S.; Li, S.; Wang, H.; Ma, H.; Yu, T. Multi-Frequency Weak Signal Detection Based on Wavelet Transform and Parameter Selection of Bistable Stochastic Resonance Model. J. Vib. Eng. Technol. 2021, 9, 887–906. [Google Scholar] [CrossRef]
- Lai, Z.H.; Wang, S.B.; Zhang, G.Q.; Zhang, C.L.; Zhang, J.W. Rolling Bearing Fault Diagnosis Based on Adaptive Multiparameter-Adjusting Bistable Stochastic Resonance. Shock Vib. 2020, 2020, 6096024. [Google Scholar] [CrossRef] [Green Version]
- Tong, L.; Li, X.; Hu, J.; Ren, L. A PSO Optimization Scale-Transformation Stochastic-Resonance Algorithm with Stability Mutation Operator. IEEE Access 2018, 6, 1167–1176. [Google Scholar] [CrossRef]
- Xia, P.; Xu, H.; Lei, M.; Ma, Z. An improved stochastic resonance method with arbitrary stable-state matching in underdamped nonlinear systems with a periodic potential for incipient bearing fault diagnosis. Meas. Sci. Technol. 2018, 29, 085002. [Google Scholar] [CrossRef]
- Lian, J.; Liu, Z.; Wang, H.; Dong, X. Adaptive variational mode decomposition method for signal processing based on mode characteristic. Mech. Syst. Signal Process. 2018, 107, 53–77. [Google Scholar] [CrossRef]
- Jia, J.P.; He, X.Q.; Jin, Y.J. Statistics, 6th ed.; China Renmin University Press: Beijing, China, 2014; pp. 268–270. [Google Scholar]
- Huang, D.W.; Yang, J.H.; Zhang, J.L.; Liu, H.G. An improved adaptive stochastic resonance method for improving the efficiency of bearing faults diagnosis. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 2352–2368. [Google Scholar] [CrossRef]
- Pan, Y.N.; Chen, J.; Li, X.L. Bearing performance degradation assessment based on lifting wavelet packet decomposition and fuzzy c-means. Mech. Syst. Signal Process. 2010, 24, 559–566. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Energy Growth Factors | Value |
|---|---|
| 0.0676 | |
| 0.0601 | |
| 0.0172 | |
| 0.0061 | |
| 0.0044 | |
| 0.00017 |
| Correlation | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 |
|---|---|---|---|---|---|---|---|
| VMD | 0.3083 | 0.4507 | 0.3916 | 0.3720 | 0.3935 | 0.4076 | 0.3886 |
| The first ACSRS−VMD | 0.6156 | 0.6914 | 0.3510 | 0.2738 | 0.2222 | 0.1654 | —— |
| The second ACSRS−VMD | 0.8052 | 0.6503 | —— | —— | —— | —— | —— |
| Outer Diameter/mm | Inner Diameter/mm | Section Circle Diameter/mm | Number of Balls | Ball Diameter/mm | Contact Angle/° | Frequency Shift/Hz | Inner Race Frequency/Hz | Outer Race Frequency/Hz | Ball Race Frequency/Hz |
|---|---|---|---|---|---|---|---|---|---|
| 47 | 20 | 33.5 | 10 | 7.4 | 15 | 33.33 | 202.207 | 131.0972 | 72.01 |
| Energy Growth Factors | Value |
|---|---|
| 0.0262 | |
| 0.0229 | |
| 0.0221 | |
| 0.0144 | |
| 0.0048 | |
| 0.0023 | |
| 0.00050 |
| Correlation | IMF1 | IMF2 | IMF3 | IMF4 | IMF5 | IMF6 | IMF7 | IMF8 |
|---|---|---|---|---|---|---|---|---|
| VMD | 0.3627 | 0.3816 | 0.3726 | 0.3791 | 0.3742 | 0.3807 | 0.3655 | 0.3900 |
| The first ACSRS−VMD | 0.6140 | 0.5033 | 0.4680 | 0.3785 | 0.3042 | 0.2108 | 0.1448 | —— |
| The second ACSRS−VMD | 0.8273 | 0.6975 | 0.6980 | —— | —— | —— | —— | —— |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, D.; Ge, J.; Wang, Y.; Shao, J. Multi-Frequency Weak Signal Decomposition and Reconstruction of Rolling Bearing Based on Adaptive Cascaded Stochastic Resonance. Machines 2021, 9, 275. https://doi.org/10.3390/machines9110275
Xu D, Ge J, Wang Y, Shao J. Multi-Frequency Weak Signal Decomposition and Reconstruction of Rolling Bearing Based on Adaptive Cascaded Stochastic Resonance. Machines. 2021; 9(11):275. https://doi.org/10.3390/machines9110275
Chicago/Turabian StyleXu, Di, Jianghua Ge, Yaping Wang, and Junpeng Shao. 2021. "Multi-Frequency Weak Signal Decomposition and Reconstruction of Rolling Bearing Based on Adaptive Cascaded Stochastic Resonance" Machines 9, no. 11: 275. https://doi.org/10.3390/machines9110275
APA StyleXu, D., Ge, J., Wang, Y., & Shao, J. (2021). Multi-Frequency Weak Signal Decomposition and Reconstruction of Rolling Bearing Based on Adaptive Cascaded Stochastic Resonance. Machines, 9(11), 275. https://doi.org/10.3390/machines9110275