Application of the Ansys Electronics Desktop Software Package for Analysis of Claw-Pole Synchronous Motor †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
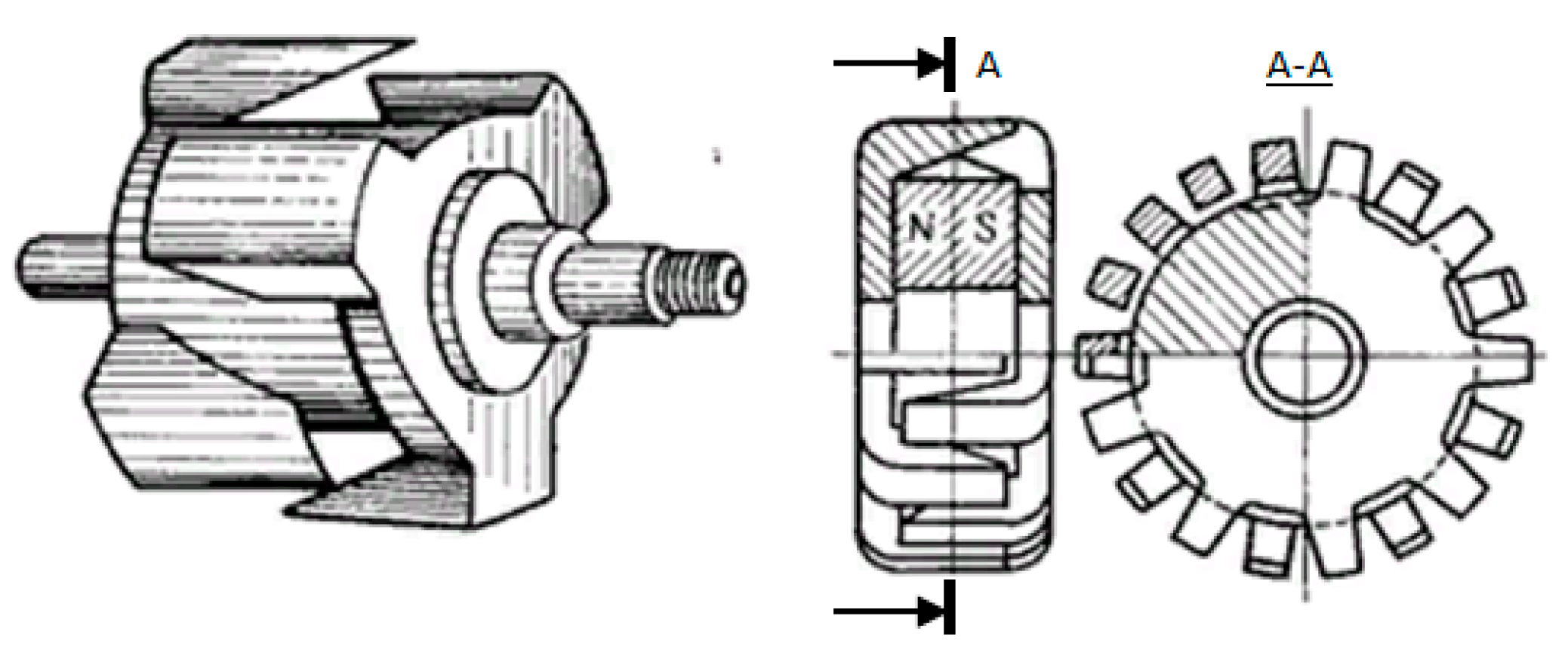
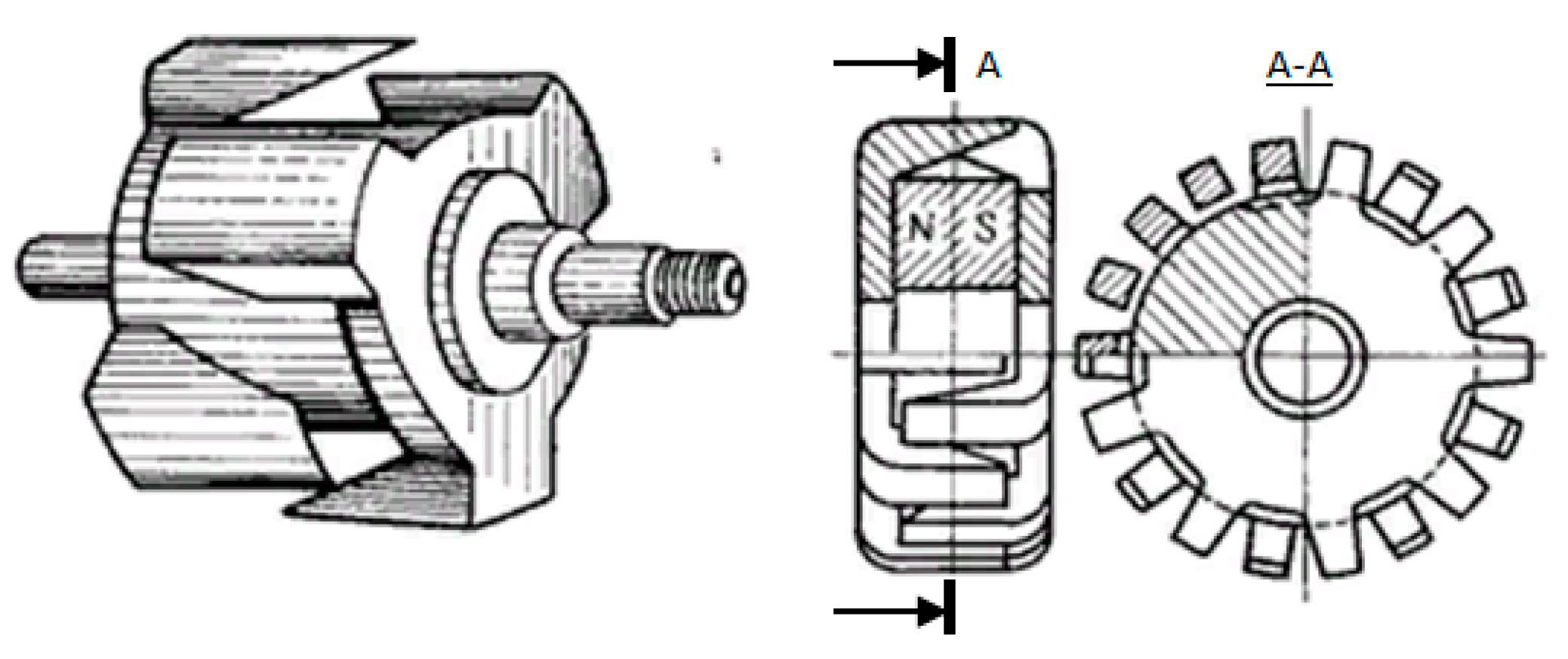
- At the first stage, a shaft with a lower part of claws poles is inserted into the anchor. This part of the magnetic system at this stage of assembly is without magnets and will not be attracted to the walls of the anchor.
- At the second stage of assembly, a permanent magnet is mounted in the inductor. Depending on the size, it can be glued together in separate parts, or it can be mounted entirely.
- In the third stage, an upper part with claws poles is inserted into the inductor. Under the influence of electromagnetic forces of a permanent magnet, it must be drawn into the inductor.
- At the last final stage, the mounting of the bearing shield completes the assembly.
2. Formulation of the Problem
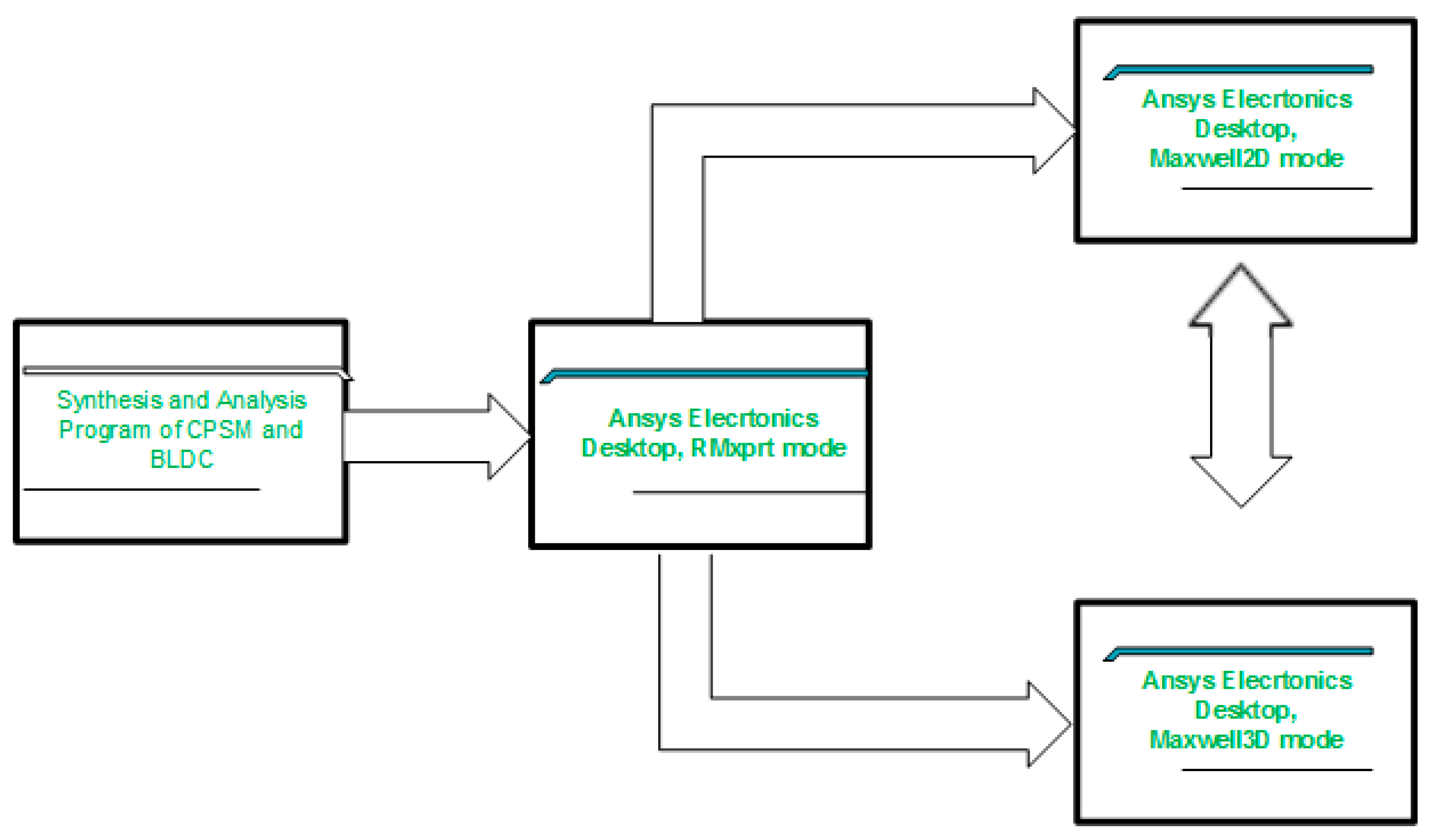
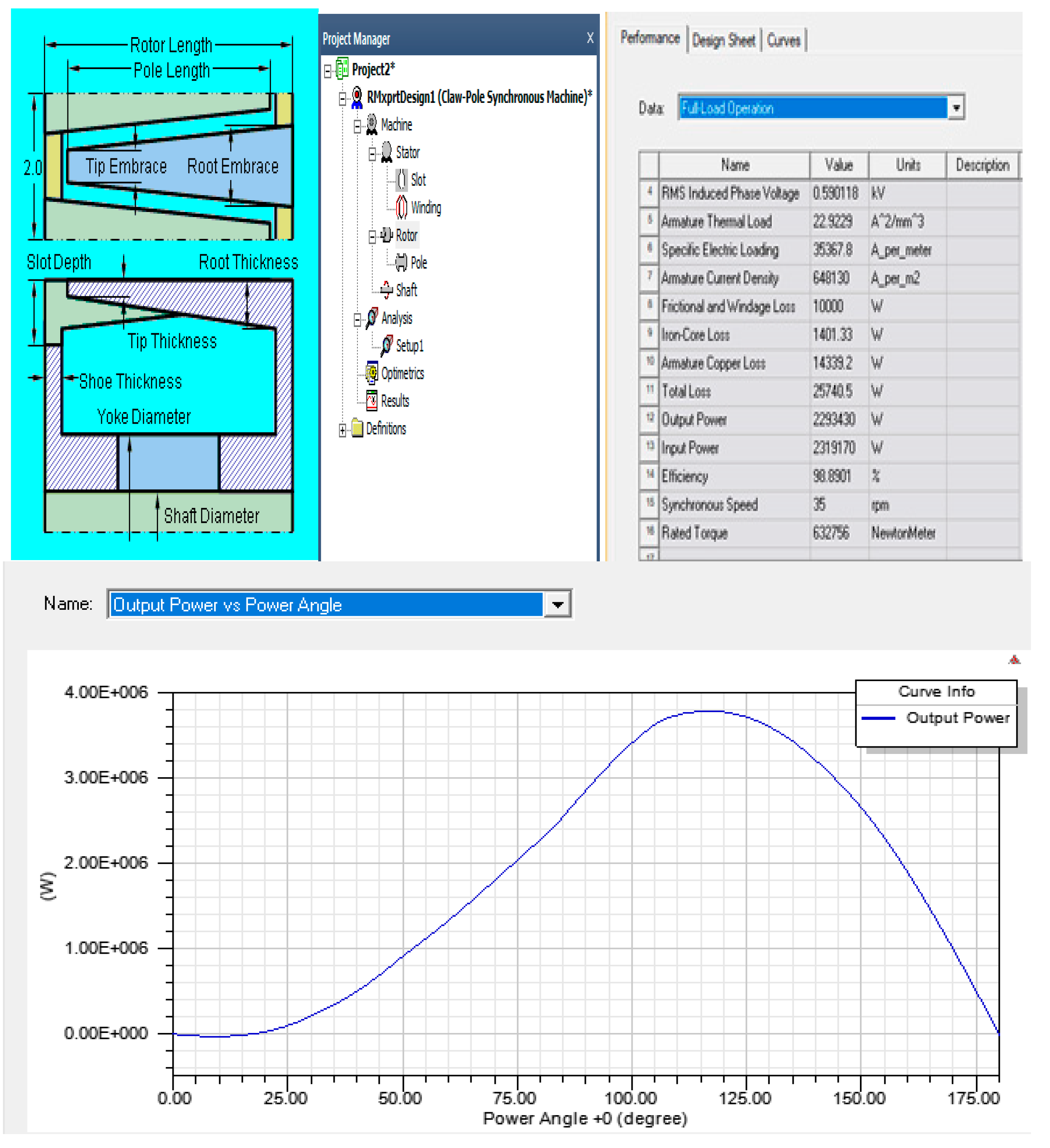
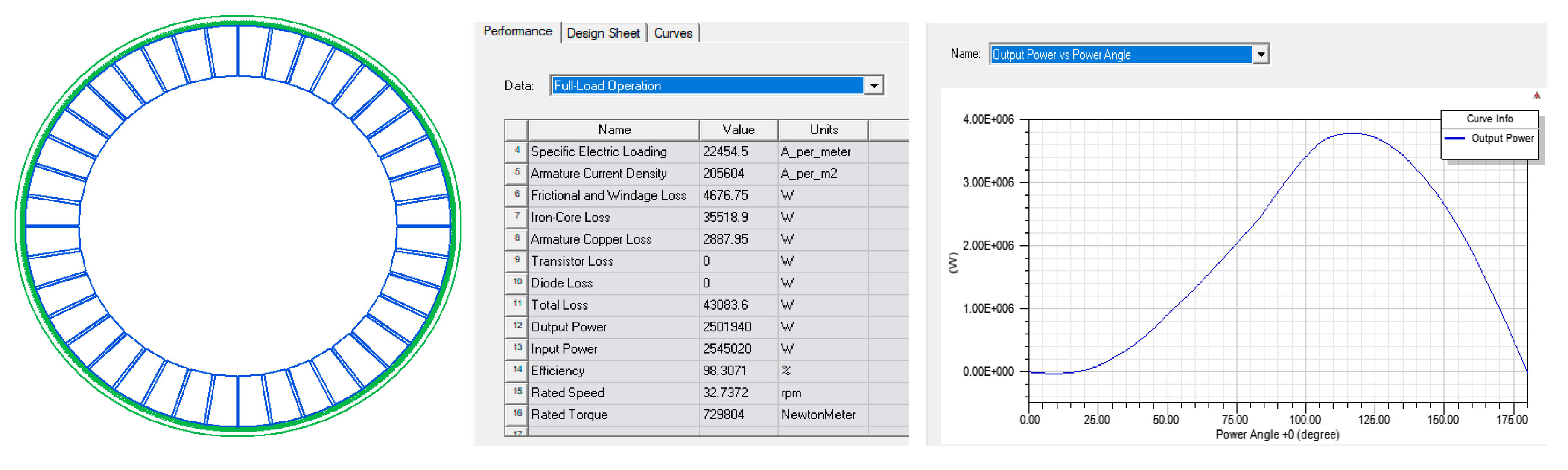
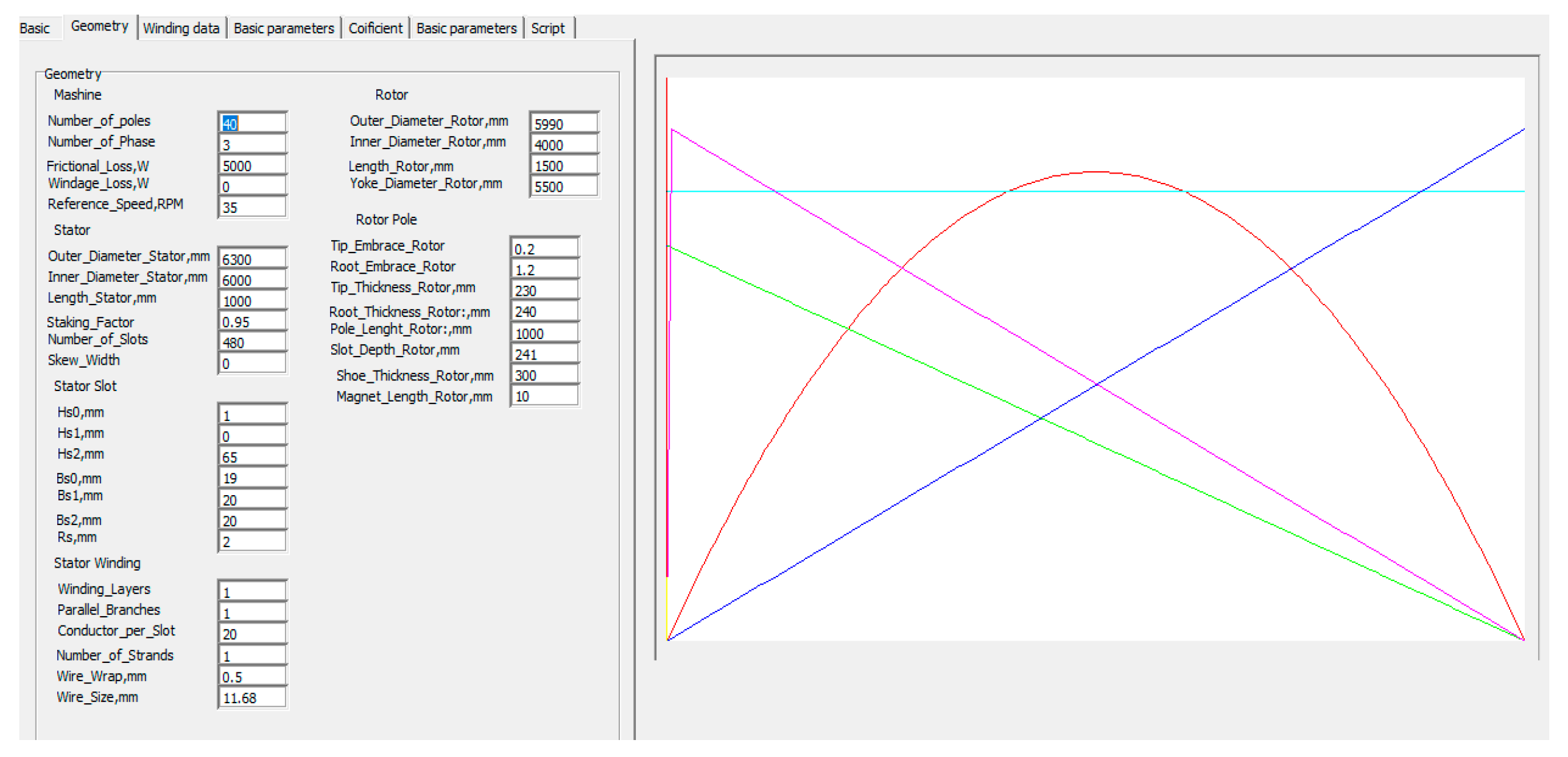
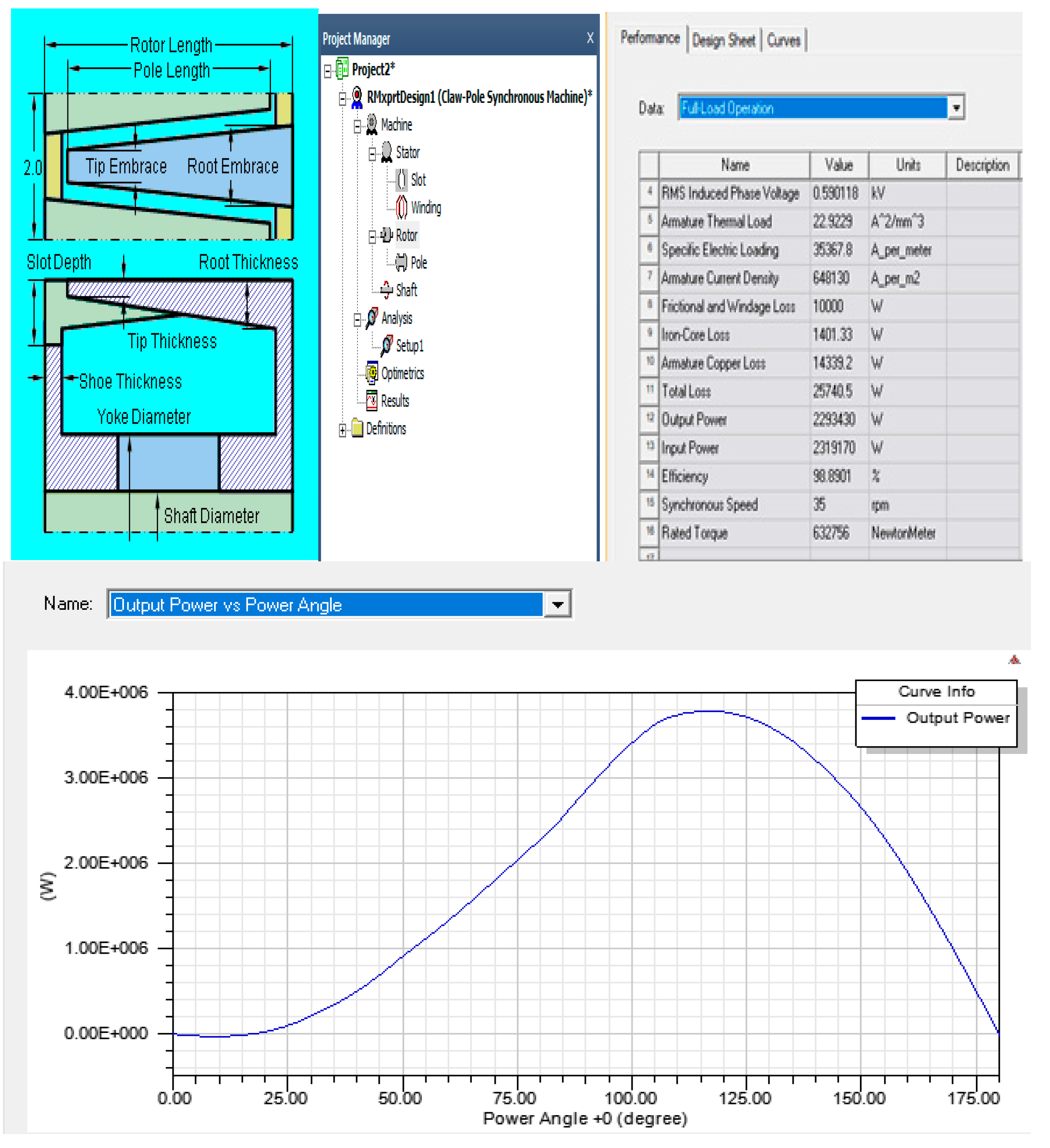
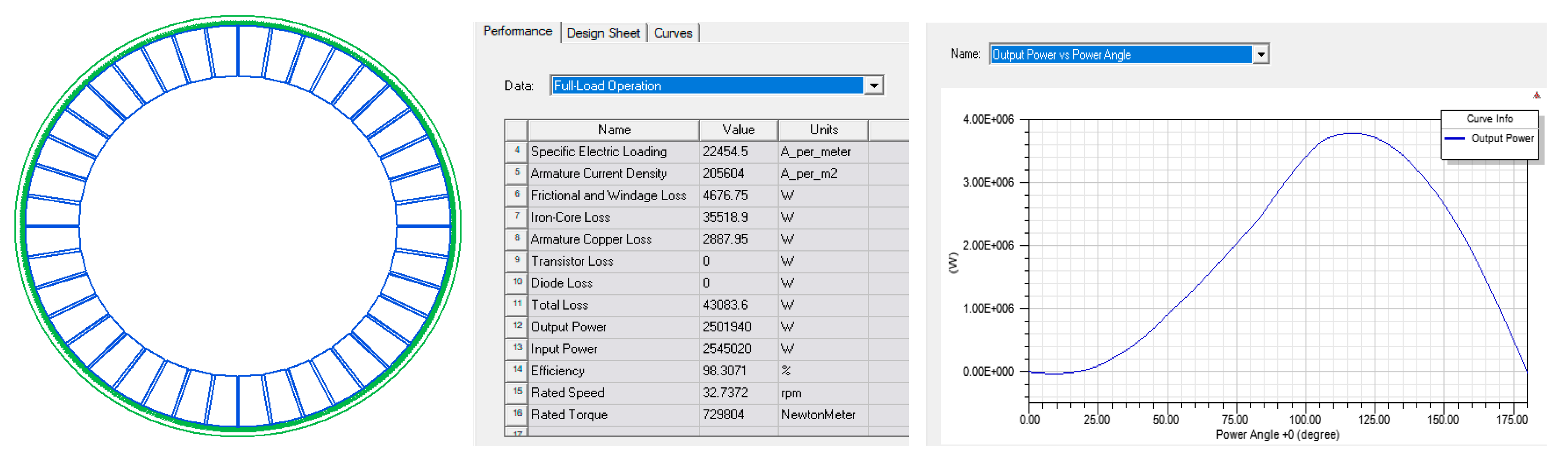
3. Description of Software for the Design of CPSM
4. Discussion
- -
- the difference between the calculated parameters in the program Delphi and RMxprt for the CPSM ranged from 5 to 9%;
- -
- the difference between the results of RMxprt for CPSM and the results of RMxprt for the BLDC with tangential magnets was 3–5%;
- -
- the difference between the results of the design mode Maxwell 2D for the BLDC with tangential magnets and the results of Maxwell 3D design for a CPSM was 5–7%;
- -
- the difference between the results of the synthesis stage for the CPSM and the results of Maxwell 3D Design of the CPSM amounted to 9–12%.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gandzha, S.; Kosimov, B.; Aminov, D. Selecting optimal design of electric motor of pilgrim mill drive for manufacturing techniques seamless pipe. In Proceedings of the ICIEAM 2019 International Conference on Industrial Engineering, Applications and Manufacturing, Sochi, Russia, 25–29 March 2019. [Google Scholar]
- Omri, R.; Ibala, A.; Masmoudi, A. Characterization on the no-and on-load operations of an improved claw pole machine. In Proceedings of the 2018 EVER 13th International Conference on Ecological Vehicles and Renewable Energies, Monte-Carlo, Monaco, 10–12 April 2018; pp. 1–8. [Google Scholar]
- Njeh, A.; Trabelsi, H. New design of the claw-pole transverse flux permanent magnet machine. In Proceedings of the 2018 15th International Multi-Conference on Systems, Signals and Devices, Hammamet, Tunisia, 19–22 March 2018; pp. 1311–1316. [Google Scholar]
- Bai, H.; Pekarek, S.D.; Tichenor, J.; Krefta, R.J.; Shields, S.J. Analytical derivation of a coupled-circuit model of a claw-pole alternator with concentrated stator windings. IEEE Trans. Energy Convers. 2002, 17, 32–38. [Google Scholar] [CrossRef]
- Kopylov, I.P. Elektricheskiye Mashiny [Electrical Machines]; Moscow High School: Moscow, ID, USA, 2006; p. 607. (In Russian) [Google Scholar]
- Vol’dek, A.I. Elektricheskiye Mashiny [Electrical Machines]; Leningrad, Energy: St Petersburg, Russia, 1978; p. 832. (In Russian) [Google Scholar]
- Kostenko, M.P.; Piotrovskiy, L.M. Elektricheskiye Mashiny, Mashiny Postoyannogo Toka. Transformatory [Electrical machines, DC Machines. Transformers]; Leningrad: Moskow, Russia, 1972; p. 544. (In Russian) [Google Scholar]
- Cristian, B.; Constantin, O.; Chiver, O.; Mircea, H.; Adina, P.V. The advantages of numerical analysis for claw pole alternator. In Proceedings of the EPE 2014 International Conference and Exposition on Electrical and Power Engineering, Iasi, Romania, 16–18 October 2014; pp. 353–357. [Google Scholar]
- Jurca, F.; Martis, C. Claw-Pole generator parameters and steady-state performances analysis. Int. Rev. Model. Simul. 2013, 6, 41–48. [Google Scholar]
- Rebhi, R.; Ibala, A.; Masmoudi, A. MEC-based sizing of a hybrid-excited claw pole alternator. IEEE Trans. Ind. Appl. 2015, 51, 211–223. [Google Scholar] [CrossRef]
- Gandzha, S.; Aminov, D.; Kosimov, B. Development of engineering method for calculation of magnetic systems for brushless motors based on finite element method. In Proceedings of the ICIEAM 2019 International Conference on Industrial Engineering, Applications and Manufacturing, Sochi, Russia, 25–29 March 2019. [Google Scholar]
- Zhang, F.-G.; Bai, H.-J.; Liu, Y. Leakage magnetic calculation on claw pole machine with outer permanent magnet rotor. Dianji yu Kongzhi Xuebao/Electr. Mach. Control 2009, 13, 548–552. [Google Scholar]
- Desanti, A.F.; Sidharta, I.; Erwantono, H.; Suryoatmojo, H.; Wahyudi, M. Design of Performance and Parameter Measurement System for Brushless Direct Current (BLDC) Motor. In Proceedings of the ISITIA 2018 International Seminar on Intelligent Technology and Its Application, Bali, Indonesia, 30–31 August 2018; pp. 175–179. [Google Scholar]
- Park, H.-S.; Park, S.-W.; Kim, D.-Y.; Kim, J.-M. Hybrid phase excitation method for improving efficiency of 7-phase BLDC motors for ship propulsion systems. J. Power Electron. 2019, 19, 761–770. [Google Scholar]
- Gandzha, S.; Aminov, D.; Kosimov, B. Design of Brushless Electric Machine with Axial Magnetic Flux Based on the Use of Nomograms. In Proceedings of the 2018 International Ural Conference on Green Energy, UralCon, Moscow, Russia, 15–18 May 2018; pp. 282–287. [Google Scholar]
- Swapna, S.; Siddappa Naidu, K. Speed characteristics of brushless dc motor using adaptive neuro fuzzy PID controller under different load condition. Int. J. Recent Technol. Eng. 2019, 7, 472–479. [Google Scholar]
- Gandzha, S.A.; Kiessh, I.E. Varible speed power. Procedia Eng. 2015, 129, 731–735. [Google Scholar] [CrossRef]
- Gandzha, S.; Kiessh, I.; Aminov, D. Development of engineering technique for calculating magnet systems with permanent magnets. In Proceedings of the International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Moscow, Russia, 15–18 May 2018. [Google Scholar] [CrossRef]
- Gandzha, S. The application of the double-fed alternator for the solving of the wind power problems. In Proceedings of the International Multidisciplinary Scientific GeoConference Surveying Geology and Mining Ecology Management, SGEM, Vienna, Austria, 2–5 November 2016; Volume 3, pp. 321–328. [Google Scholar]
- Gandzha, S.A. Proposals for the design of high-speed electric machines. In Proceedings of the International Conference on Industrial Engineering, ICIE 2016 9th Asia-Oceania Symposium on Fire Science and Technology, Chelyabinsk, Russia, 19–20 May 2016. [Google Scholar]
- Lai, C.-K.; Tsao, Y.-T.; Tsai, C.-C. Modeling, Analysis, and Realization of Permanent Magnet Synchronous Motor Current Vector Control by MATLAB/Simulink and FPGA. Machines 2017, 5, 26. [Google Scholar] [CrossRef]
- Lee, J.S. Stability Analysis of Deadbeat-Direct Torque and Flux Control for Permanent Magnet Synchronous Motor Drives with Respect to Parameter Variations. Energies 2018, 11, 2027. [Google Scholar] [CrossRef]
- Wang, W.; Wang, W. Compensation for Inverter Nonlinearity in Permanent Magnet Synchronous Motor Drive and Effect on Torsional Vibration of Electric Vehicle Driveline. Energies 2018, 11, 2542. [Google Scholar] [CrossRef]
- Jung, T.-U.; Jang, J.-H.; Park, C.-S. A Back-EMF Estimation Error Compensation Method for Accurate Rotor Position Estimation of Surface Mounted Permanent Magnet Synchronous Motors. Energies 2017, 10, 1160. [Google Scholar] [CrossRef]
- Qian, J.; Ji, C.; Pan, N.; Wu, J. Improved Sliding Mode Control for Permanent Magnet Synchronous Motor Speed Regulation System. Appl. Sci. 2018, 8, 2491. [Google Scholar] [CrossRef]
- Gandzha, S.; Kiessh, I. Selection of winding commutation for axial gap machines with any phases. In Proceedings of the 2018 ICIEAM International Conference on Industrial Engineering, Applications and Manufacturing, Moscow, Russia, 15–18 May 2018. [Google Scholar]
- Gandzha, S.; Sogrin, A.; Martyanov, A.; Kiessh, I. The design of the low-speed brushless motor for the winch which operates in see-water. In Proceedings of the SGEM International Multidisciplinary Scientific GeoConference Surveying Geology and Mining Ecology Management, Vienna, Austria, 27–29 November 2017; pp. 783–790. [Google Scholar]
- Gandzha, S.; Aminov, D.; Kiessh, I.; Kosimov, B. Application of Digital Twins Technology for Analysis of Brushless Electric Machines with Axial Magnetic Flux. In Proceedings of the GloSIC 2018 Global Smart Industry Conference, Chelyabinsk, Russia, 13–15 November 2018. [Google Scholar]
- Gandzha, S.; Kiessh, I. The high-speed axial gap electric alternator is the best solution for a gas turbine motor. In Proceedings of the SGEM International Multidisciplinary Scientific GeoConference Surveying Geology and Mining Ecology Management, Vienna, Austria, 27–29 November 2017; Volume 17, pp. 791–796. [Google Scholar]
- Gandzha, S.A.; Sogrin, A.I.; Kiessh, I.E. The Comparative Analysis of Permanent Magnet Electric Machines with Integer and Fractional Number of Slots per Pole and Phase. Chelyabinsk, Russia. Procedia Eng. 2015, 129, 408–414. [Google Scholar] [CrossRef]
- Gandzha, S.A.; Kiessh, I.E. Application brushless machines with combine excitation for a small and medium power windmills. Procedia Eng. 2015, 129, 191–194. [Google Scholar]
- Zheng, P.; Wu, Q.; Zhao, J.; Bai, J.; Zhao, Q. Performance analysis and simulation of a novel brushless double rotor machine for power-split HEV Applications. Energies 2012, 5, 119–137. [Google Scholar] [CrossRef]

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gandzha, S.; Kosimov, B.; Aminov, D. Application of the Ansys Electronics Desktop Software Package for Analysis of Claw-Pole Synchronous Motor. Machines 2019, 7, 65. https://doi.org/10.3390/machines7040065
Gandzha S, Kosimov B, Aminov D. Application of the Ansys Electronics Desktop Software Package for Analysis of Claw-Pole Synchronous Motor. Machines. 2019; 7(4):65. https://doi.org/10.3390/machines7040065
Chicago/Turabian StyleGandzha, Sergey, Bakhtiyor Kosimov, and Dilshod Aminov. 2019. "Application of the Ansys Electronics Desktop Software Package for Analysis of Claw-Pole Synchronous Motor" Machines 7, no. 4: 65. https://doi.org/10.3390/machines7040065
APA StyleGandzha, S., Kosimov, B., & Aminov, D. (2019). Application of the Ansys Electronics Desktop Software Package for Analysis of Claw-Pole Synchronous Motor. Machines, 7(4), 65. https://doi.org/10.3390/machines7040065