



Online Tuning of Koopman Operator for Fault-Tolerant Control: A Case Study of Mobile Robot Localising on Minimal Sensor Information



Abstract
1. Introduction
1.1. Related Works
1.1.1. Sensor Fault-Tolerant Localisation of Mobile Robot
1.1.2. Koopman Framework Based Control of Autonomous Systems
- Data-driven Koopman framework-based fault-tolerant localisation: While the sensor fusion provides a reliable and robust localisation [7,8], the capabilities of sensors are limited in challenging scenarios [13,16]. Addressing the challenge where even minimal sensor information for localisation fails, this study adopts the Koopman operator framework to achieve fault-tolerant localisation. The Koopman framework-based data-driven model of the DC motor is identified and leveraged in the Koopman-based linear observer to detect and compensate for the encoder sensor faults.
- Extension of the Koopman framework to fault-tolerant control: In contrast to previous studies that deployed the Koopman framework for identification and control of autonomous systems [30,31,32,33,34,36], this work extends its application to fault-tolerant control. Furthermore, the online tuning of the Koopman operator is implemented for efficient fault-tolerant trajectory tracking.
1.2. Overview of the Problem Statement
2. Preliminaries
2.1. Koopman Framework
2.2. Transfer Function Estimation by System Identification Toolbox of MATLAB®
3. Trajectory Tracking of Wheeled Robot
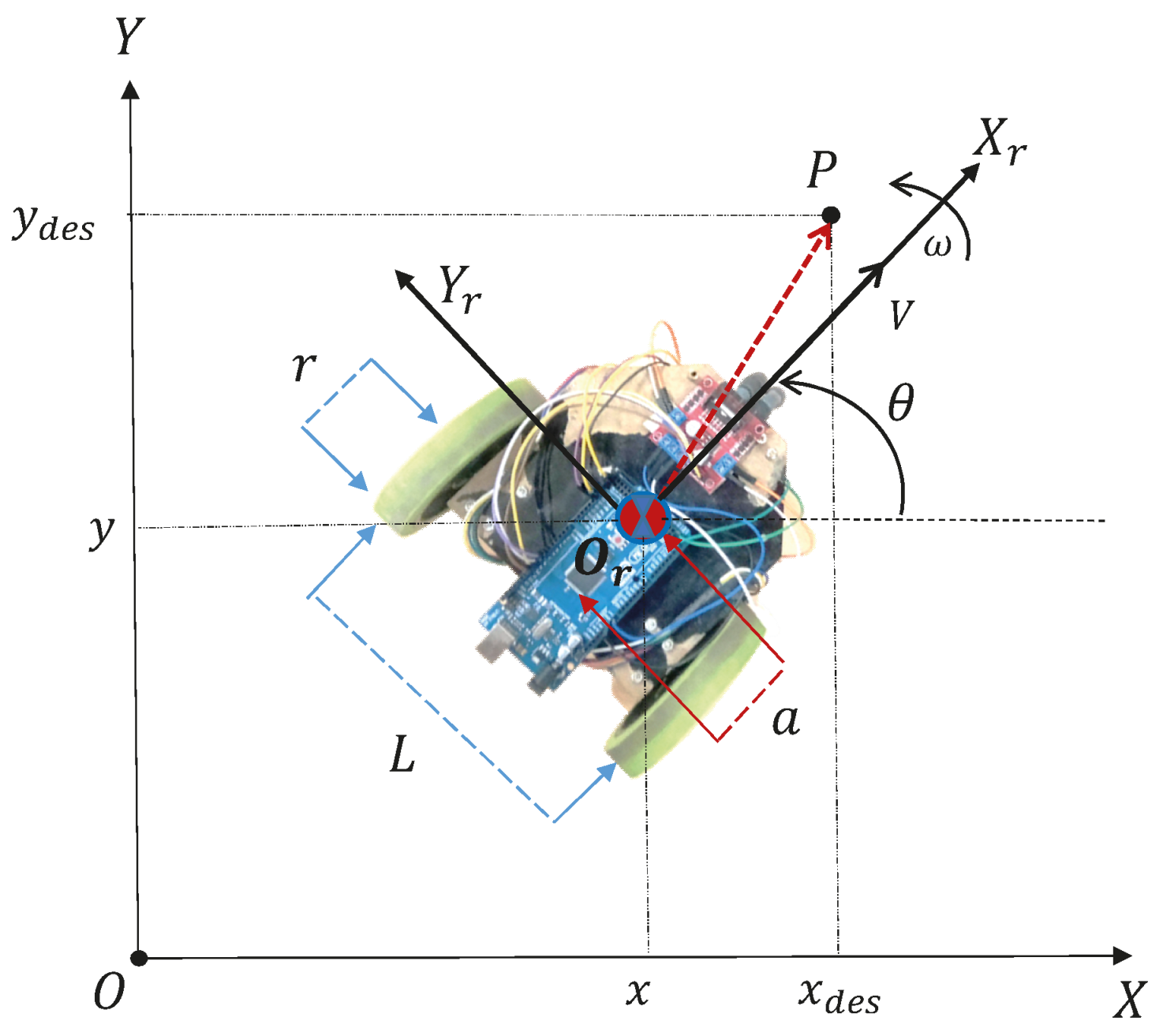
3.1. Description of Wheeled Robot
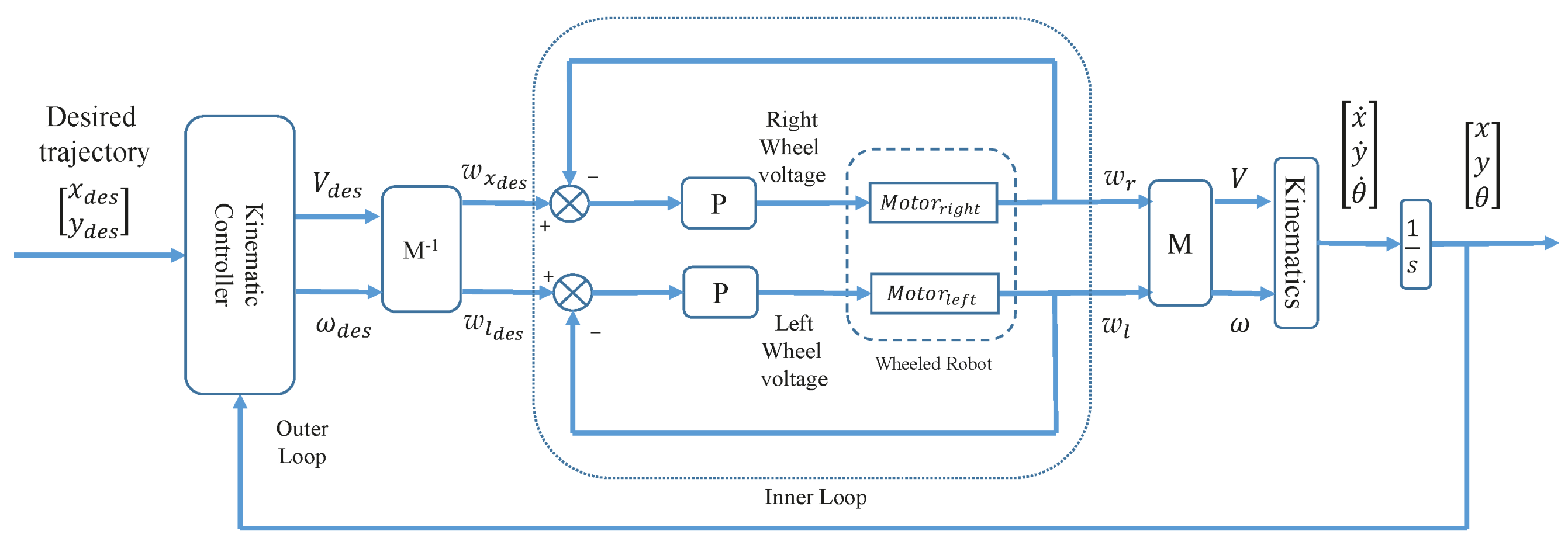
3.2. Trajectory Tracking
4. Development and Implementation of Analytical Models of DC Motor
4.1. System Identification Toolbox in MATLAB®
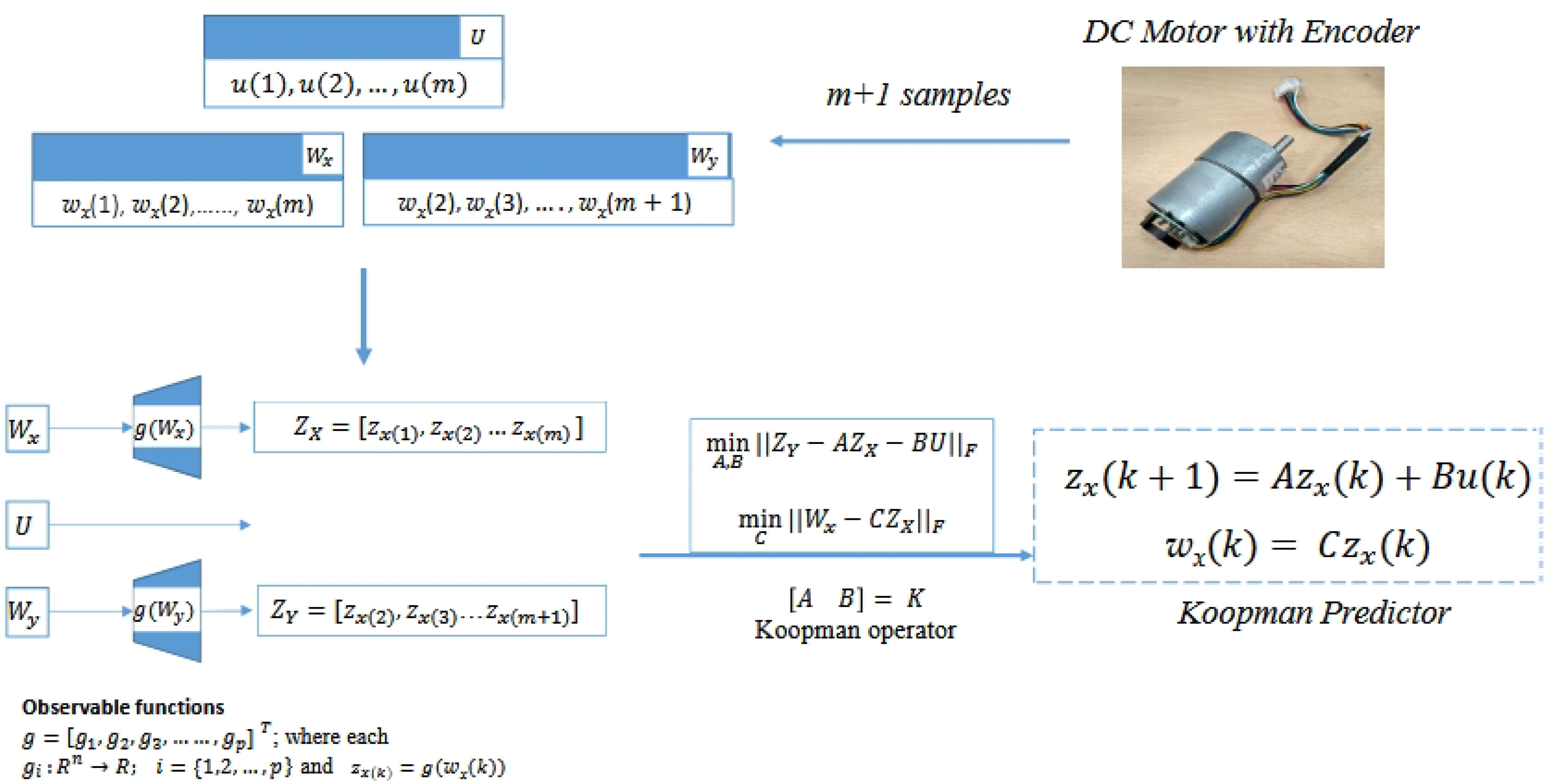
4.2. Koopman Framework
4.2.1. Dynamic Mode Decomposition
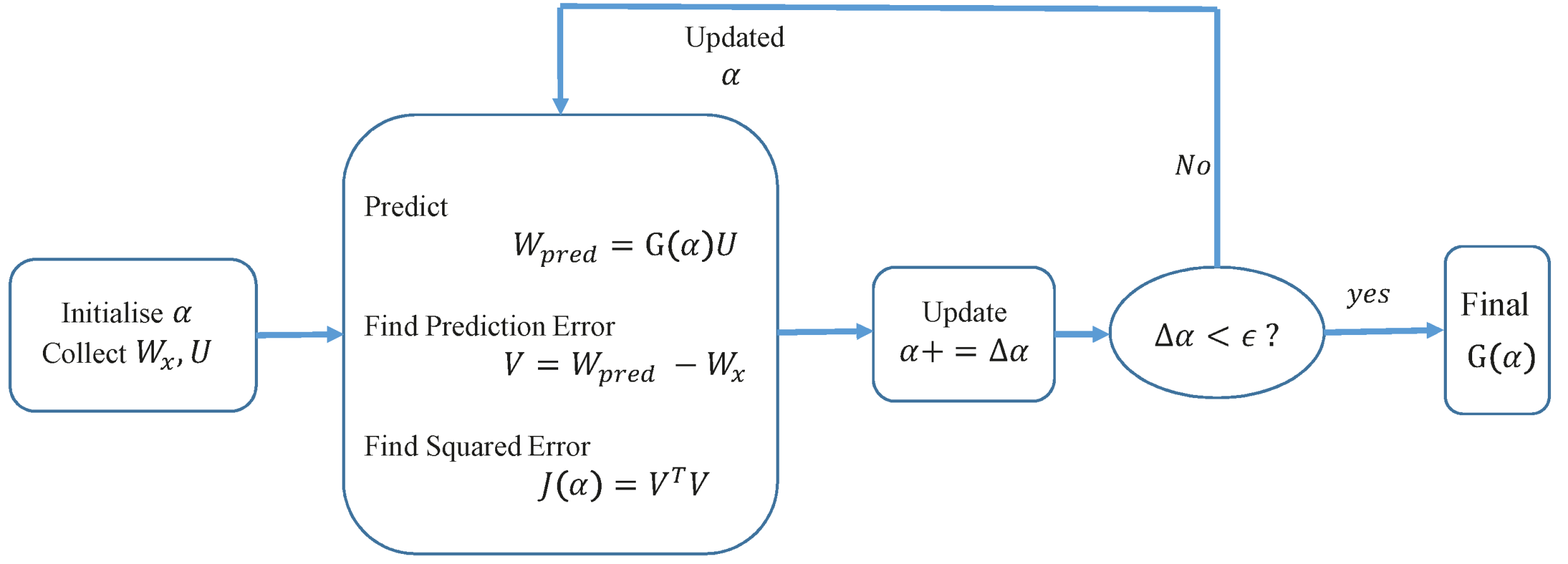
4.2.2. Online Tuning of Koopman Predictor
4.3. Comparison of Analytical Models
4.4. Fault Detection and Isolation (FDI)
4.5. Fault Tolerant Control (FTC)
5. Results and Discussion
6. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DC | Direct Current |
| WMR | Wheeled Mobile Robot |
| EKF | Extended Kalman Filter |
| IMM | Interacting Multiple Model Kalman Filters |
| LiDAR | Light Detection And Ranging |
| HIL | Hardware in Loop |
| IMU | Inertial Measurement Units |
| GPS | Global Positioning System |
| GNSS | Global Navigation Satellite System |
| FDI | Fault Detection and Isolation |
| FTC | Fault Tolerant Control |
| DMD | Dynamic Mode Decomposition |
| VDMD | Varying Dynamic Mode Decomposition |
| tf | Transfer function |
| RMSE | Root mean square error |
| NLS | Nonlinear Least Sqaures |
| RPM | Revolutions per minute |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input (Volts) | A | B |
|---|---|---|
| 2 | 0.936 | 1.355 |
| 3 | 0.934 | 1.382 |
| 4 | 0.929 | 1.463 |
| 5 | 0.928 | 1.488 |
| 6 | 0.928 | 1.467 |
| 7 | 0.93 | 1.432 |
| 8 | 0.931 | 1.408 |
| 9 | 0.931 | 1.411 |
| 10 | 0.932 | 1.367 |
| 11 | 0.932 | 1.369 |
| 12 | 0.931 | 1.363 |
References
- Sivarathri, A.K.; Shukla, A.; Gupta, A. Kinematic modes of vision-based heterogeneous uav-agv system. Array 2023, 17, 100269. [Google Scholar] [CrossRef]
- Kamel, M.A.; Yu, X.; Zhang, Y. Formation control and coordination of multiple unmanned ground vehicles in normal and faulty situations: A review. Annu. Rev. Control 2020, 49, 128–144. [Google Scholar] [CrossRef]
- Martins, F.N.; Celeste, W.C.; Carelli, R.; Sarcinelli-Filho, M.; Bastos-Filho, T.F. An adaptive dynamic controller for autonomous mobile robot trajectory tracking. Control Eng. Pract. 2008, 16, 1354–1363. [Google Scholar] [CrossRef]
- Abci, B.; El Najjar, M.E.B.; Cocquempot, V.; Dherbomez, G. Sensor fault tolerant sliding mode control using information filters with application to a two-wheeled mobile robot. In Proceedings of the 2019 IEEE 6th International Conference on Control, Decision and Information Technologies (CoDIT), Paris, France, 23–26 April 2019; pp. 308–313. [Google Scholar]
- Bader, K.; Lussier, B.; Schön, W. A fault tolerant architecture for data fusion: A real application of Kalman filters for mobile robot localization. Robot. Auton. Syst. 2017, 88, 11–23. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, J.; Cao, J.; Gao, W.; Ren, Q. A fault-tolerant architecture for mobile robot localization. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; pp. 584–589. [Google Scholar]
- Kheirandish, M.; Yazdi, E.A.; Mohammadi, H.; Mohammadi, M. A fault-tolerant sensor fusion in mobile robots using multiple model Kalman filters. Robot. Auton. Syst. 2023, 161, 104343. [Google Scholar] [CrossRef]
- Elsayed, A.M.; Elshalakani, M.; Hammad, S.A.; Maged, S.A. Decentralized fault-tolerant control of multi-mobile robot system addressing LiDAR sensor faults. Sci. Rep. 2024, 14, 25713. [Google Scholar] [CrossRef] [PubMed]
- Harbaoui, N.; Makkawi, K.; Ait-Tmazirte, N.; El Najjar, M.E.B. Context Adaptive Fault Tolerant Multi-sensor fusion: Towards a Fail-Safe Multi Operational Objective Vehicle Localization. J. Intell. Robot. Syst. 2024, 110, 26. [Google Scholar] [CrossRef]
- Wang, L.; Li, S. Enhanced multi-sensor data fusion methodology based on multiple model estimation for integrated navigation system. Int. J. Control Autom. Syst. 2018, 16, 295–305. [Google Scholar] [CrossRef]
- Schichler, L.; Festl, K.; Solmaz, S. Robust Multi-Sensor Fusion for Localization in Hazardous Environments Using Thermal, LiDAR, and GNSS Data. Sensors 2025, 25, 2032. [Google Scholar] [CrossRef]
- Ušinskis, V.; Nowicki, M.; Dzedzickis, A.; Bučinskas, V. Sensor-fusion based navigation for autonomous mobile robot. Sensors 2025, 25, 1248. [Google Scholar] [CrossRef]
- Sivarathri, A.K.; Shukla, A. Autonomous Non-Communicative Navigation Assistance to the Ground Vehicle by an Aerial Vehicle. Machines 2025, 13, 152. [Google Scholar] [CrossRef]
- Mascher, K.; Watzko, M.; Koppert, A.; Eder, J.; Hofer, P.; Wieser, M. NIKE BLUETRACK: Blue force tracking in GNSS-denied environments based on the fusion of UWB, IMus and 3D models. Sensors 2022, 22, 2982. [Google Scholar] [CrossRef] [PubMed]
- Cheng, G.; Wang, Z.; Zheng, J.Y. Modeling weather and illuminations in driving views based on big-video mining. IEEE Trans. Intell. Veh. 2018, 3, 522–533. [Google Scholar] [CrossRef]
- Mounier, E.; Karaim, M.; Korenberg, M.; Noureldin, A. Multi-IMU System for Robust Inertial Navigation: Kalman Filters and Differential Evolution-Based Fault Detection and Isolation. IEEE Sens. J. 2025, 25, 9998–10014. [Google Scholar] [CrossRef]
- Yan, P.; Wen, W.; Hsu, L.T. Integration of vehicle dynamic model and system identification model for extending the navigation service under sensor failures. IEEE Trans. Intell. Veh. 2023, 9, 2236–2248. [Google Scholar] [CrossRef]
- Li, D.; Wang, Y.; Wang, J.; Wang, C.; Duan, Y. Recent advances in sensor fault diagnosis: A review. Sens. Actuators A Phys. 2020, 309, 111990. [Google Scholar] [CrossRef]
- Ao, B.; Wang, Y.; Yu, L.; Brooks, R.R.; Iyengar, S. On precision bound of distributed fault-tolerant sensor fusion algorithms. Acm Comput. Surv. (Csur) 2016, 49, 1–23. [Google Scholar] [CrossRef]
- Foshati, A.; Ejlali, A. Enhancing Sensor Fault Tolerance in Automotive Systems with Cost-Effective Cyber Redundancy. IEEE Trans. Intell. Veh. 2024, 9, 4794–4803. [Google Scholar] [CrossRef]
- Tolossa, T.D.; Manohar, P.; Jahnavi, A.; Bhavsingh, T.; Teja, S.S.; Jangir, Y.; Hote, Y.V.; Orlando, M.F. Fault Detection and Analysis of a Mobile Robot using Radial Basis Function Network. In Proceedings of the 2024 IEEE Third International Conference on Power, Control and Computing Technologies (ICPC2T), Raipur, India, 18–20 January 2024; pp. 1–6. [Google Scholar]
- Pouliezos, A.; Stavrakakis, G.; Pouliezos, A.; Stavrakakis, G. Analytical redundancy methods. Real Time Fault Monit. Ind. Processes 1994, 12, 93–178. [Google Scholar]
- Amin, A.A.; Mubarak, A.; Waseem, S. Application of physics-informed neural networks in fault diagnosis and fault-tolerant control design for electric vehicles: A review. Measurement 2025, 246, 116728. [Google Scholar] [CrossRef]
- Bevanda, P.; Sosnowski, S.; Hirche, S. Koopman operator dynamical models: Learning, analysis and control. Annu. Rev. Control 2021, 52, 197–212. [Google Scholar] [CrossRef]
- Williams, M.O.; Kevrekidis, I.G.; Rowley, C.W. A data–driven approximation of the koopman operator: Extending dynamic mode decomposition. J. Nonlinear Sci. 2015, 25, 1307–1346. [Google Scholar] [CrossRef]
- Surana, A. Koopman operator based observer synthesis for control-affine nonlinear systems. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 6492–6499. [Google Scholar]
- Koopman, B.O. Hamiltonian systems and transformation in Hilbert space. Proc. Natl. Acad. Sci. USA 1931, 17, 315–318. [Google Scholar] [CrossRef] [PubMed]
- Mauroy, A.; Susuki, Y.; Mezić, I. Koopman Operator in Systems and Control; Springer: Berlin, Germany, 2020. [Google Scholar]
- Proctor, J.L.; Brunton, S.L.; Kutz, J.N. Generalizing Koopman theory to allow for inputs and control. SIAM J. Appl. Dyn. Syst. 2018, 17, 909–930. [Google Scholar] [CrossRef]
- Li, S.; Xu, Z.; Liu, J.; Xu, C. Learning-based Extended Dynamic Mode Decomposition for Addressing Path-following Problem of Underactuated Ships with Unknown Dynamics. Int. J. Control Autom. Syst. 2022, 20, 4076–4089. [Google Scholar] [CrossRef]
- Zheng, K.; Huang, P.; Fettweis, G.P. Optimal Control of Quadrotor Attitude System Using Data-driven Approximation of Koopman Operator. IFAC-PapersOnLine 2023, 56, 834–840. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, X.; Xu, X.; Liu, X.; Liu, J. Deep neural networks with Koopman operators for modeling and control of autonomous vehicles. IEEE Trans. Intell. Veh. 2022, 8, 135–146. [Google Scholar] [CrossRef]
- Bruder, D.; Fu, X.; Gillespie, R.B.; Remy, C.D.; Vasudevan, R. Data-driven control of soft robots using Koopman operator theory. IEEE Trans. Robot. 2020, 37, 948–961. [Google Scholar] [CrossRef]
- Abraham, I.; Murphey, T.D. Active learning of dynamics for data-driven control using Koopman operators. IEEE Trans. Robot. 2019, 35, 1071–1083. [Google Scholar] [CrossRef]
- Bakhtiaridoust, M.; Yadegar, M.; Meskin, N. Data-driven fault detection and isolation of nonlinear systems using deep learning for Koopman operator. ISA Trans. 2023, 134, 200–211. [Google Scholar] [CrossRef]
- Akumalla, R.K.; Shukla, A.; Jain, T. Koopman Framework-Based Observer Design for Actuator Fault Identification in Quadrotor. In Proceedings of the 2024 IEEE Tenth Indian Control Conference (ICC), Bhopal, India, 9–11 December 2024; pp. 344–349. [Google Scholar]
- Korda, M.; Mezić, I. Linear predictors for nonlinear dynamical systems: Koopman operator meets model predictive control. Automatica 2018, 93, 149–160. [Google Scholar] [CrossRef]
- Tang, W.J.; Liu, Z.T.; Wang, Q. DC motor speed control based on system identification and PID auto tuning. In Proceedings of the 2017 IEEE 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 6420–6423. [Google Scholar]
- Ab Rahman, N.N.; Yahya, N.M. System identification for a mathematical model of DC motor system. In Proceedings of the 2022 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Shah Alam, Malaysia, 25 June 2022; pp. 30–35. [Google Scholar]
- Brunton, S.L.; Brunton, B.W.; Proctor, J.L.; Kutz, J.N. Koopman invariant subspaces and finite linear representations of nonlinear dynamical systems for control. PLoS ONE 2016, 11, e0150171. [Google Scholar] [CrossRef] [PubMed]
- MathWorks. System Identification Toolbox; MathWorks, r2024a ed. 2024. Available online: https://in.mathworks.com/help/ident/gs/about-system-identification.html (accessed on 24 March 2025).
- Nocedal, J.; Wright, S.J. Nonlinear Least-Squares Problems. In Numerical Optimization; Springer: New York, NY, USA, 1999; pp. 250–275. [Google Scholar] [CrossRef]
- Jain, T.; Yamé, J.J.; Sauter, D.; Jain, T.; Yamé, J.J.; Sauter, D. Active Fault-Tolerant Control: Current and Past. Act. Fault-Toler. Control Syst. A Behav. Syst. Theor. Perspect. 2018, 128, 11–28. [Google Scholar]














| tf | |
| DMD |
| Current | Previous | |
|---|---|---|
| tf | ||
| DMD | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akumalla, R.K.; Jain, T. Online Tuning of Koopman Operator for Fault-Tolerant Control: A Case Study of Mobile Robot Localising on Minimal Sensor Information. Machines 2025, 13, 454. https://doi.org/10.3390/machines13060454
Akumalla RK, Jain T. Online Tuning of Koopman Operator for Fault-Tolerant Control: A Case Study of Mobile Robot Localising on Minimal Sensor Information. Machines. 2025; 13(6):454. https://doi.org/10.3390/machines13060454
Chicago/Turabian StyleAkumalla, Ravi Kiran, and Tushar Jain. 2025. "Online Tuning of Koopman Operator for Fault-Tolerant Control: A Case Study of Mobile Robot Localising on Minimal Sensor Information" Machines 13, no. 6: 454. https://doi.org/10.3390/machines13060454
APA StyleAkumalla, R. K., & Jain, T. (2025). Online Tuning of Koopman Operator for Fault-Tolerant Control: A Case Study of Mobile Robot Localising on Minimal Sensor Information. Machines, 13(6), 454. https://doi.org/10.3390/machines13060454