
The Innovative Design and Performance Testing of a Mobile Robot for the Automated Installation of Spacers on Six-Split Transmission Lines †
 , and
, and
Abstract
1. Introduction
2. Related Research
3. Modeling
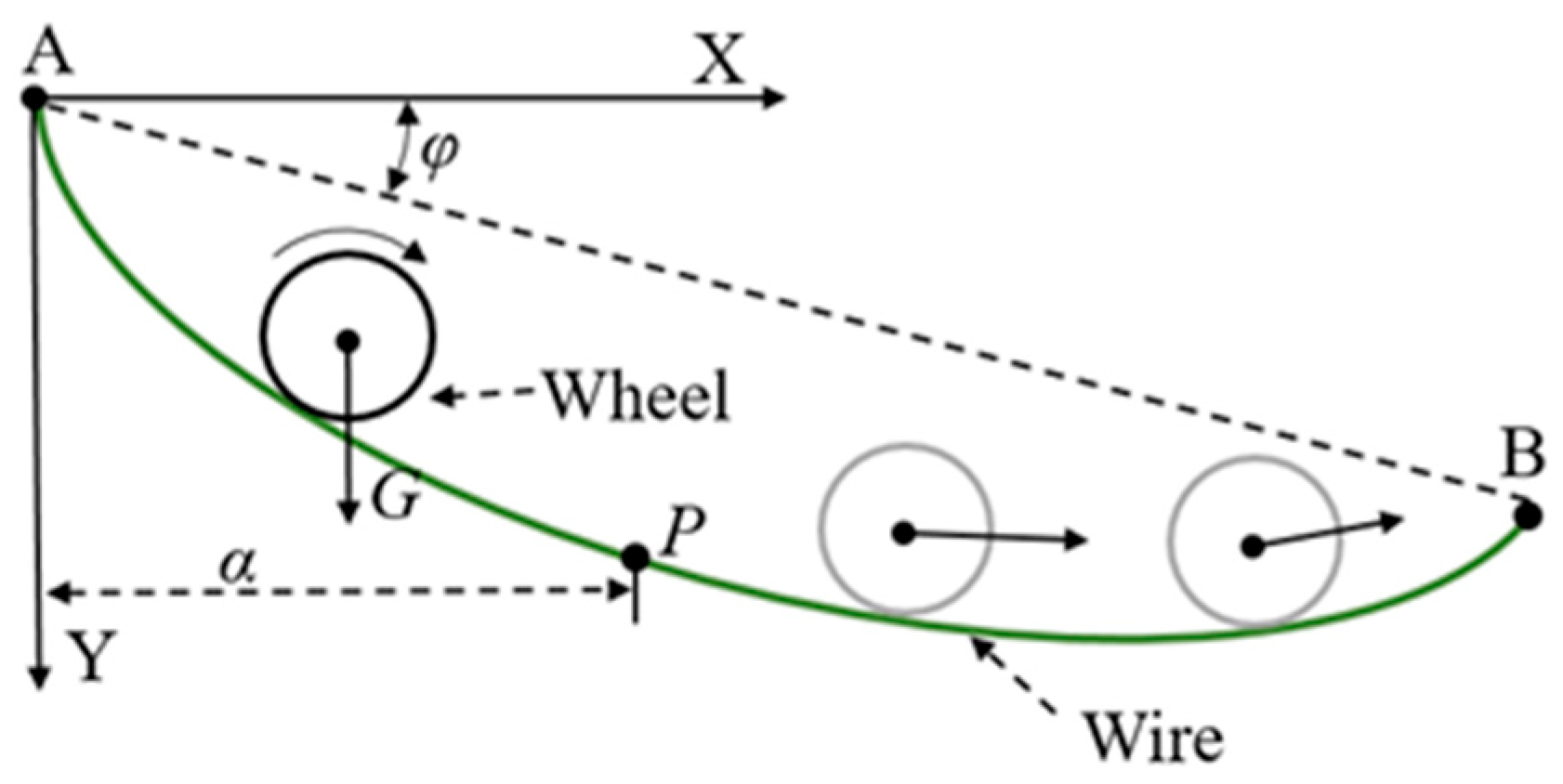
3.1. The Impact of the Robot on the Wire
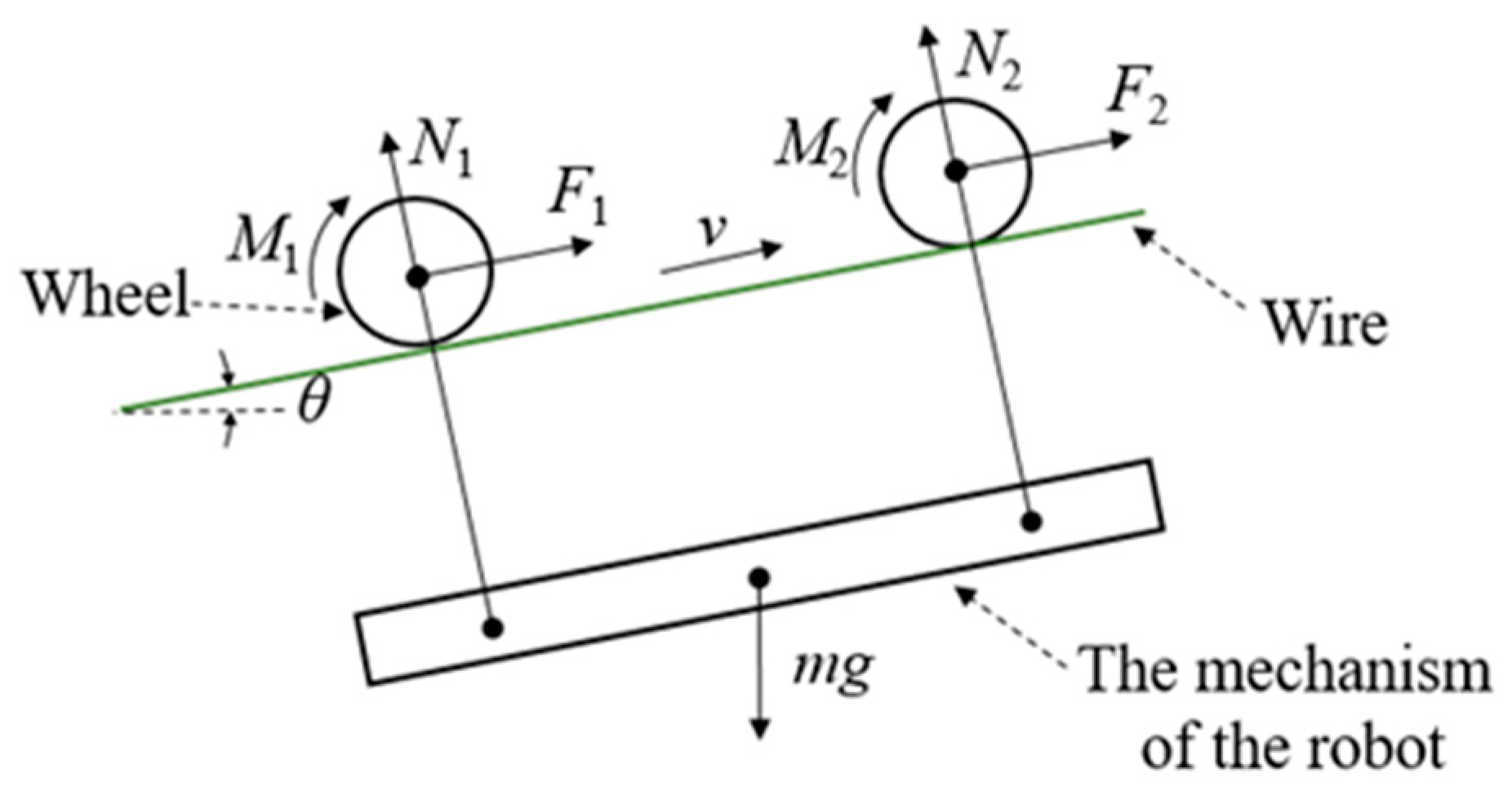
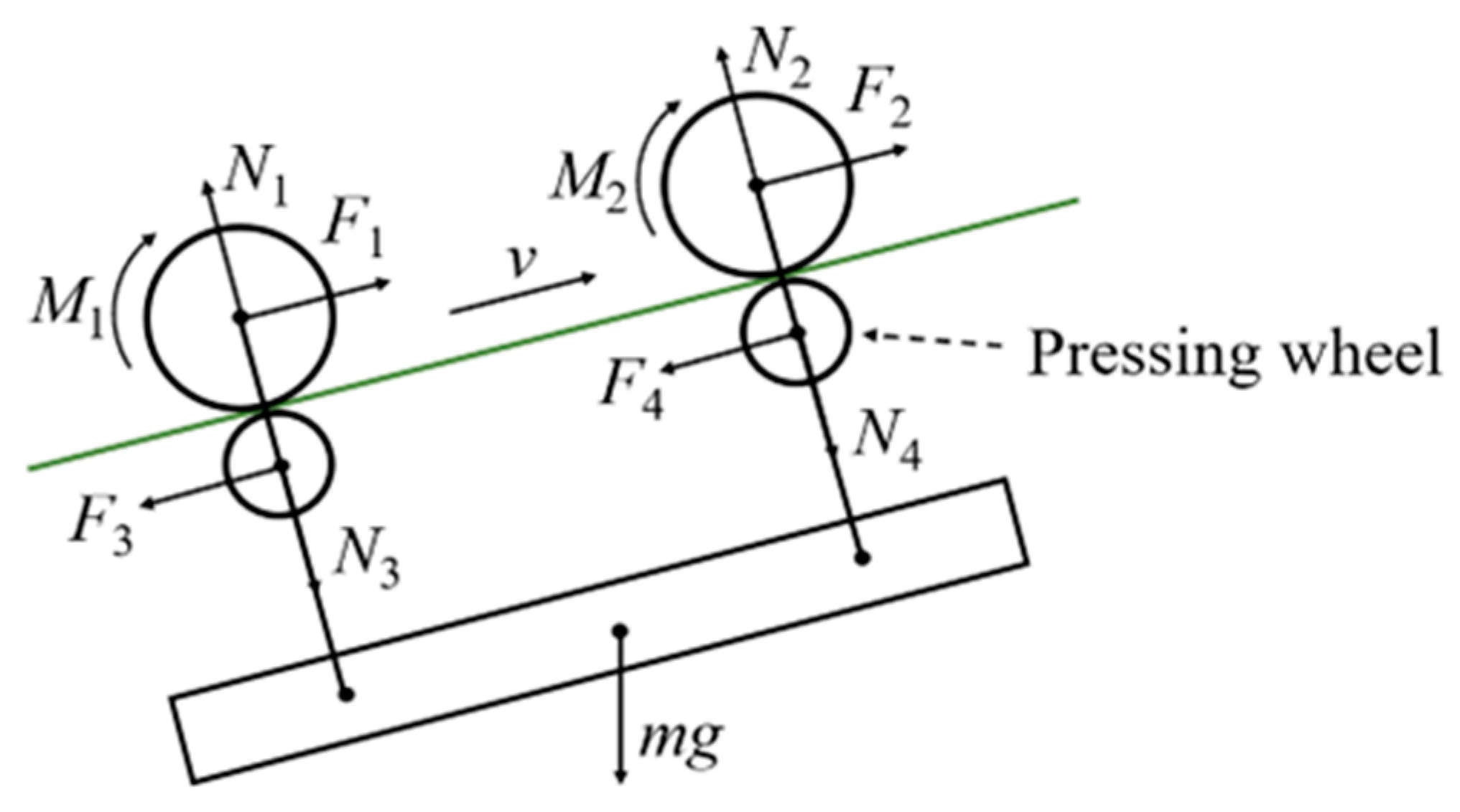
3.2. Forward Analysis of Robot
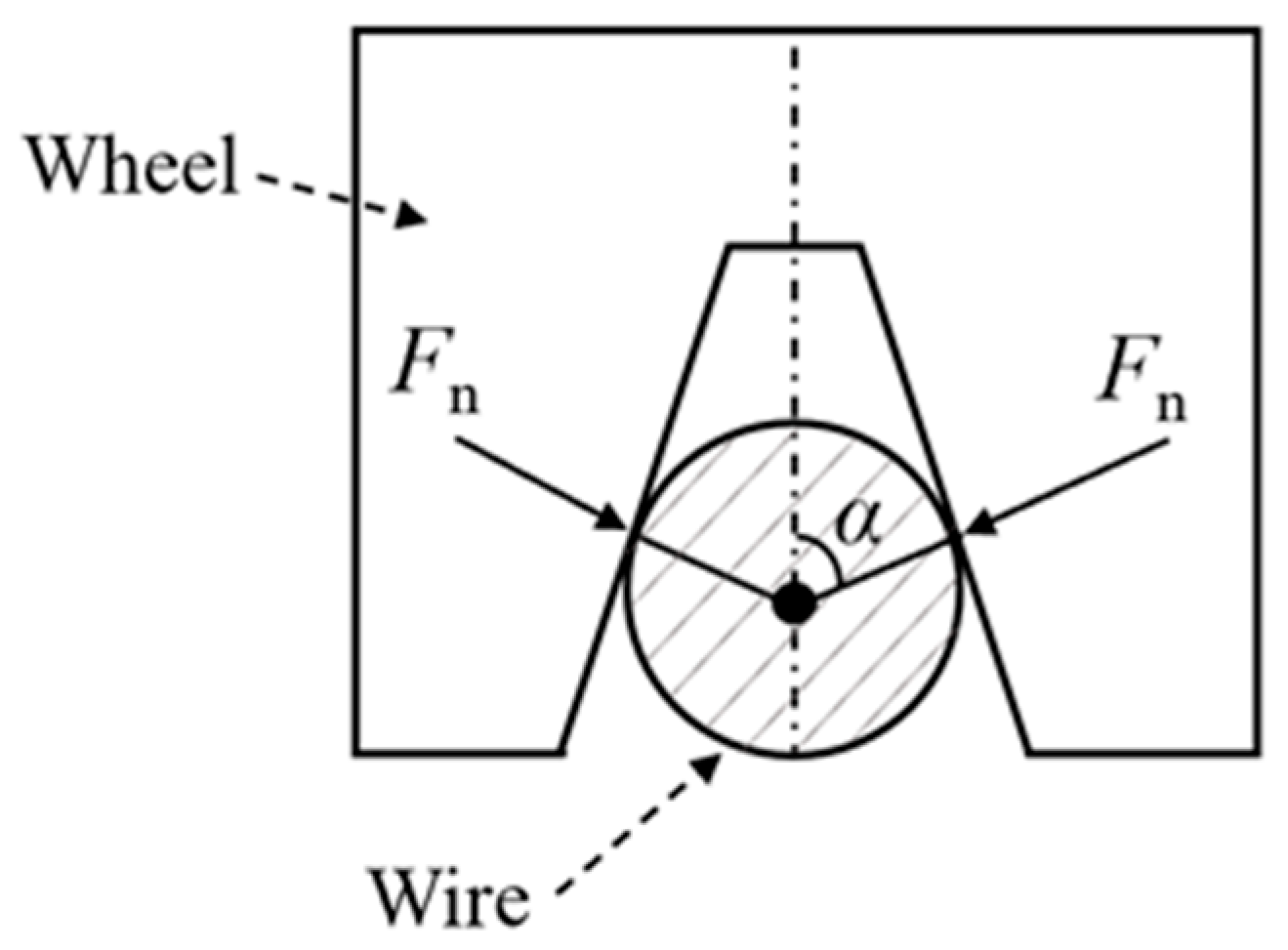
3.3. Wheel Cross-Section Analysis
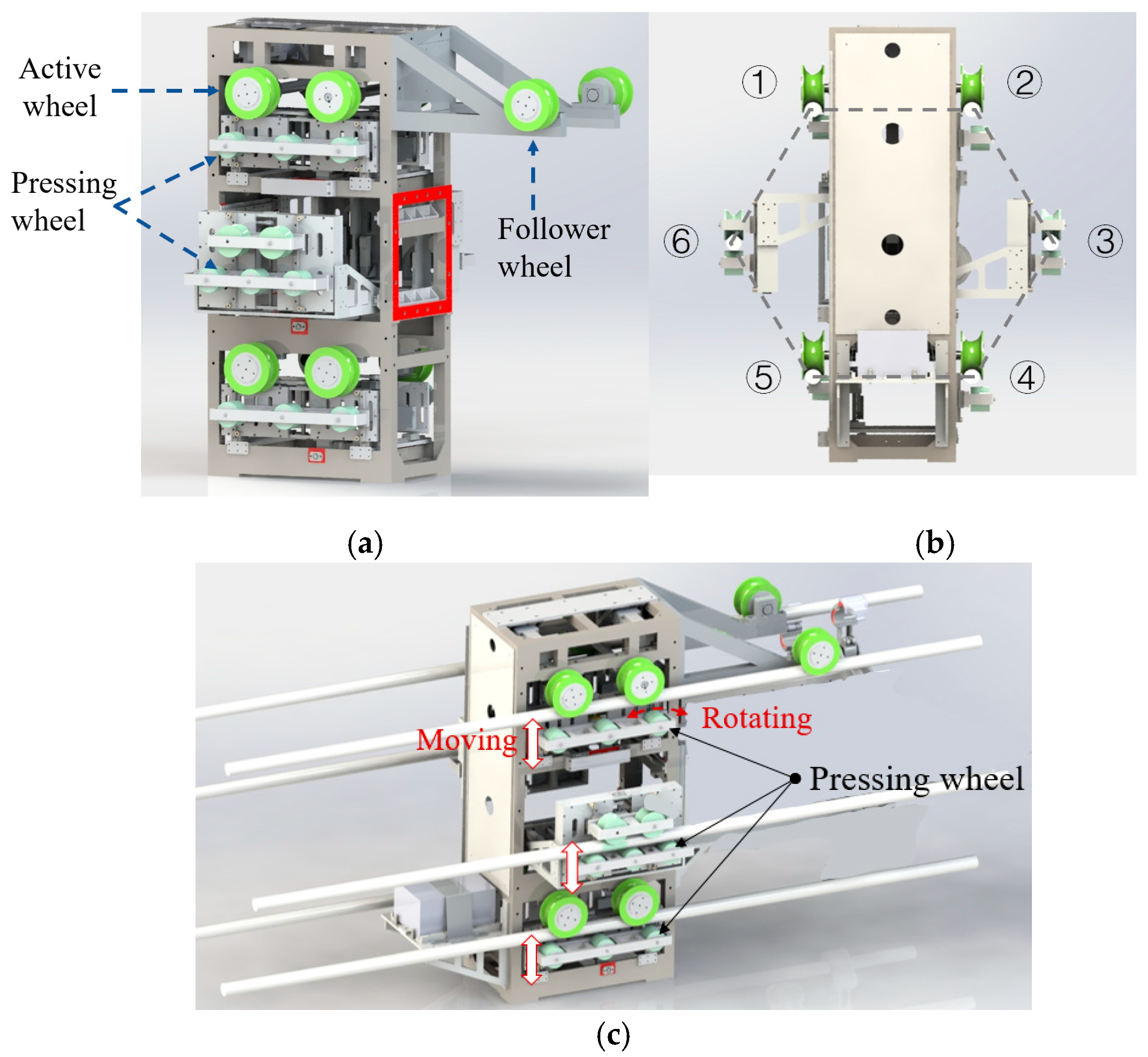
4. Mechanical Design
4.1. Subsection
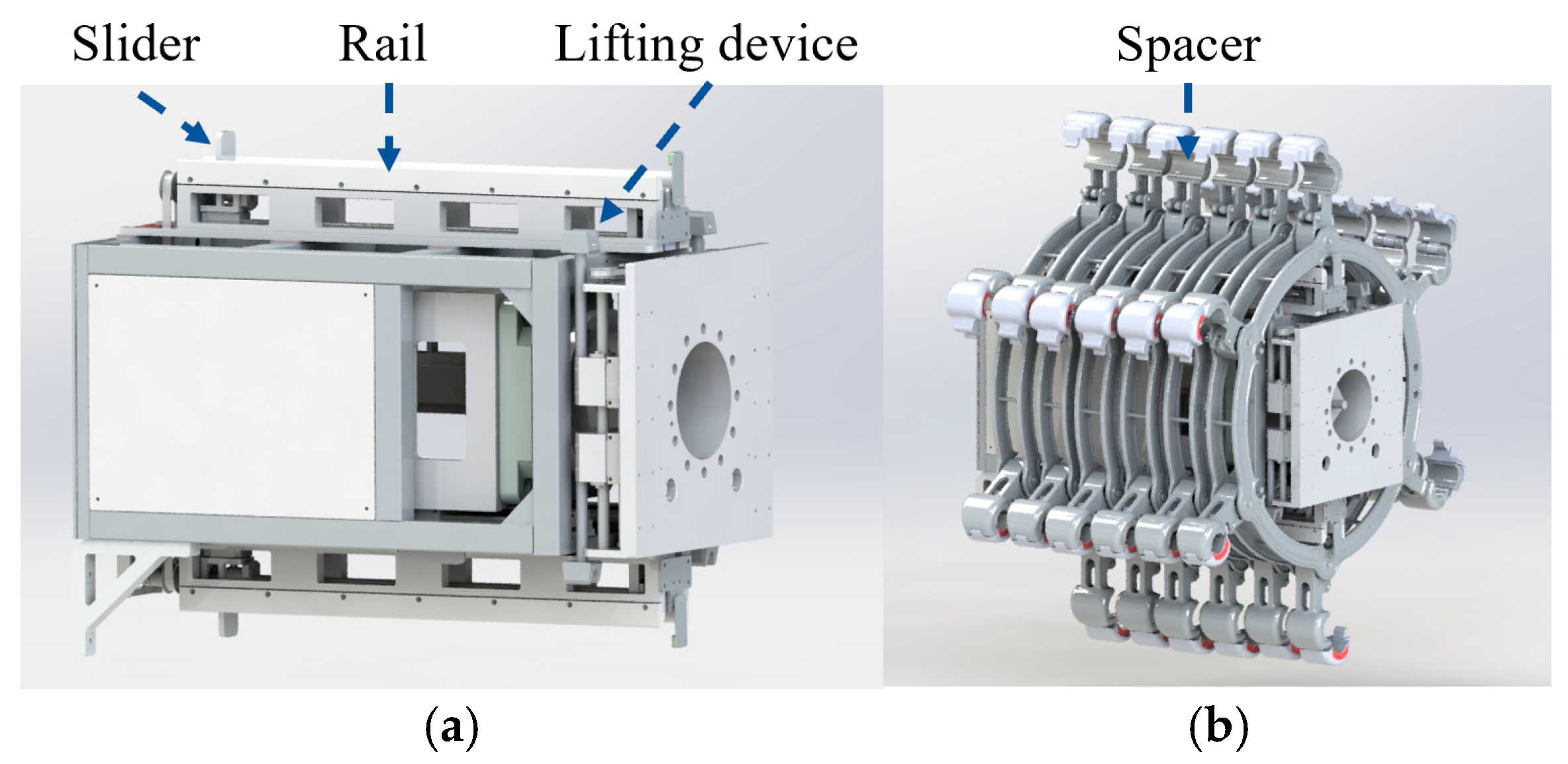
4.2. Transfer Mechanism for Spacer
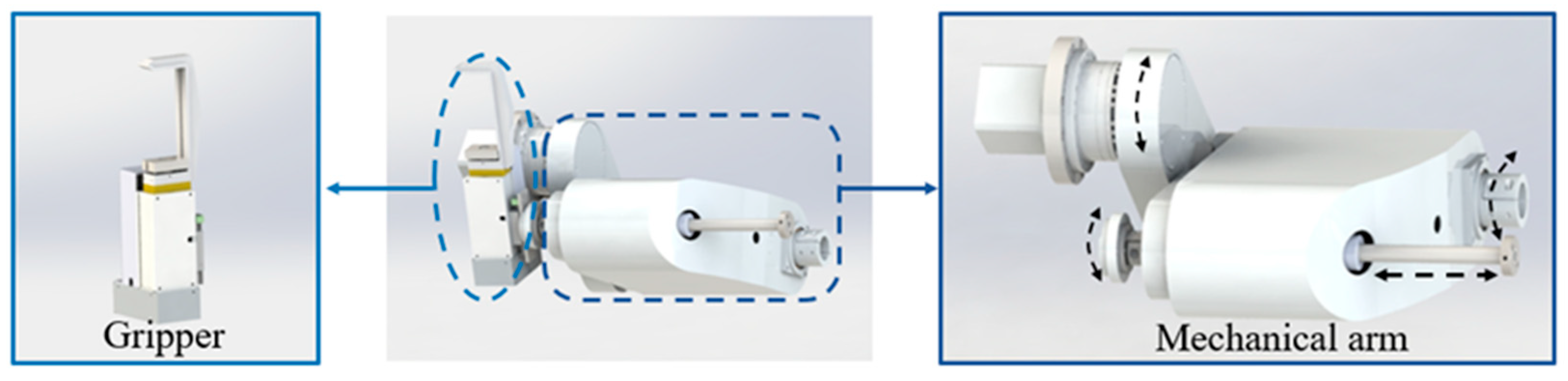
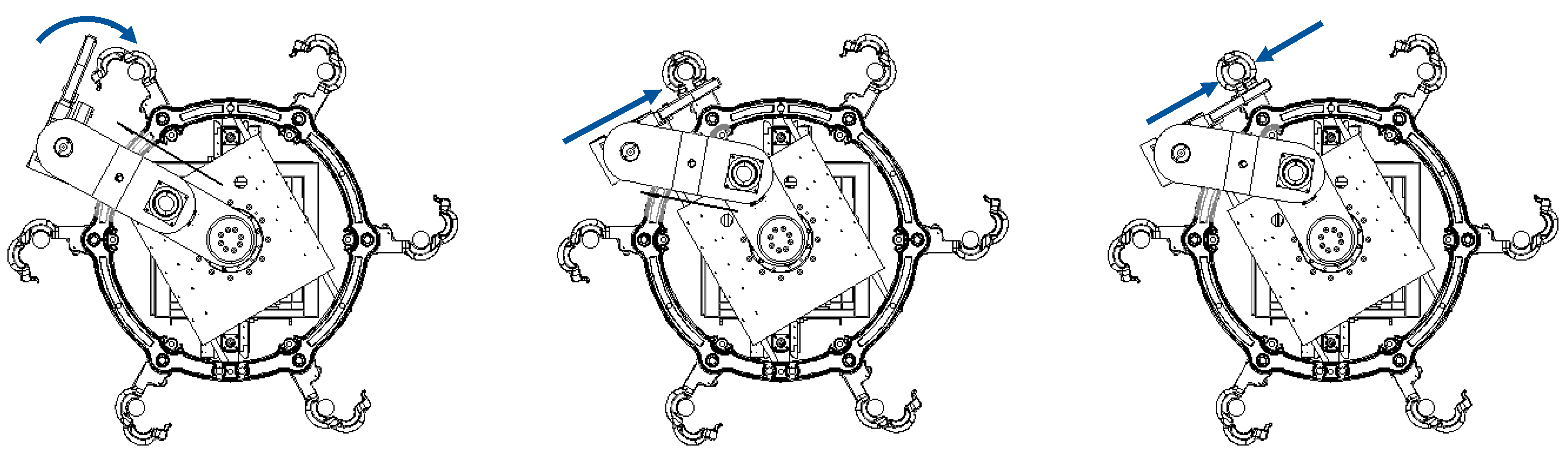
4.3. Installation Mechanism
4.4. Control System
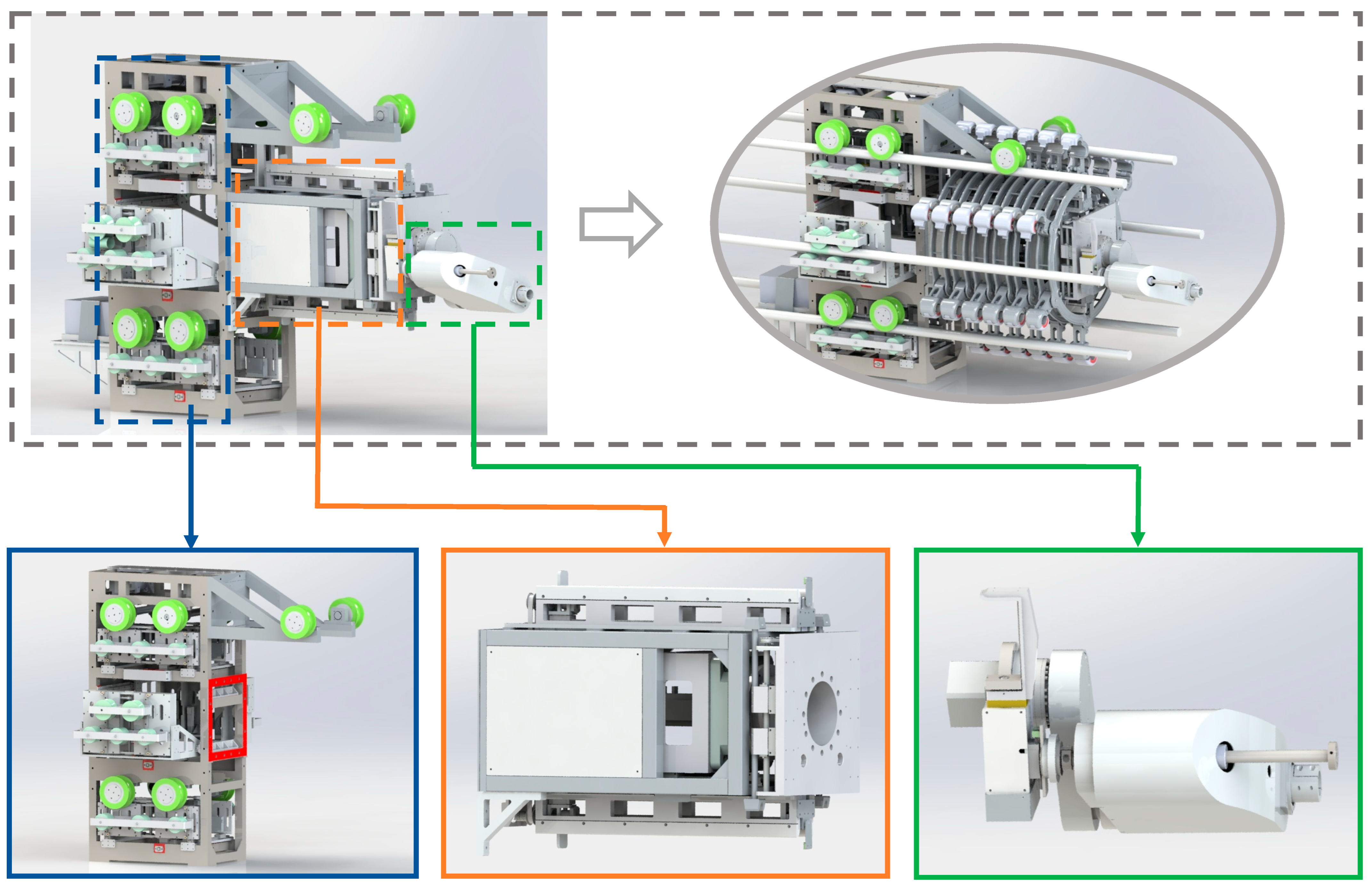
5. Integration and Assembly
5.1. Integrated Design
5.2. Prototype Assembly
5.3. Spacer Installation Process Design
5.4. Installation Process Design
6. Tests and Discussion
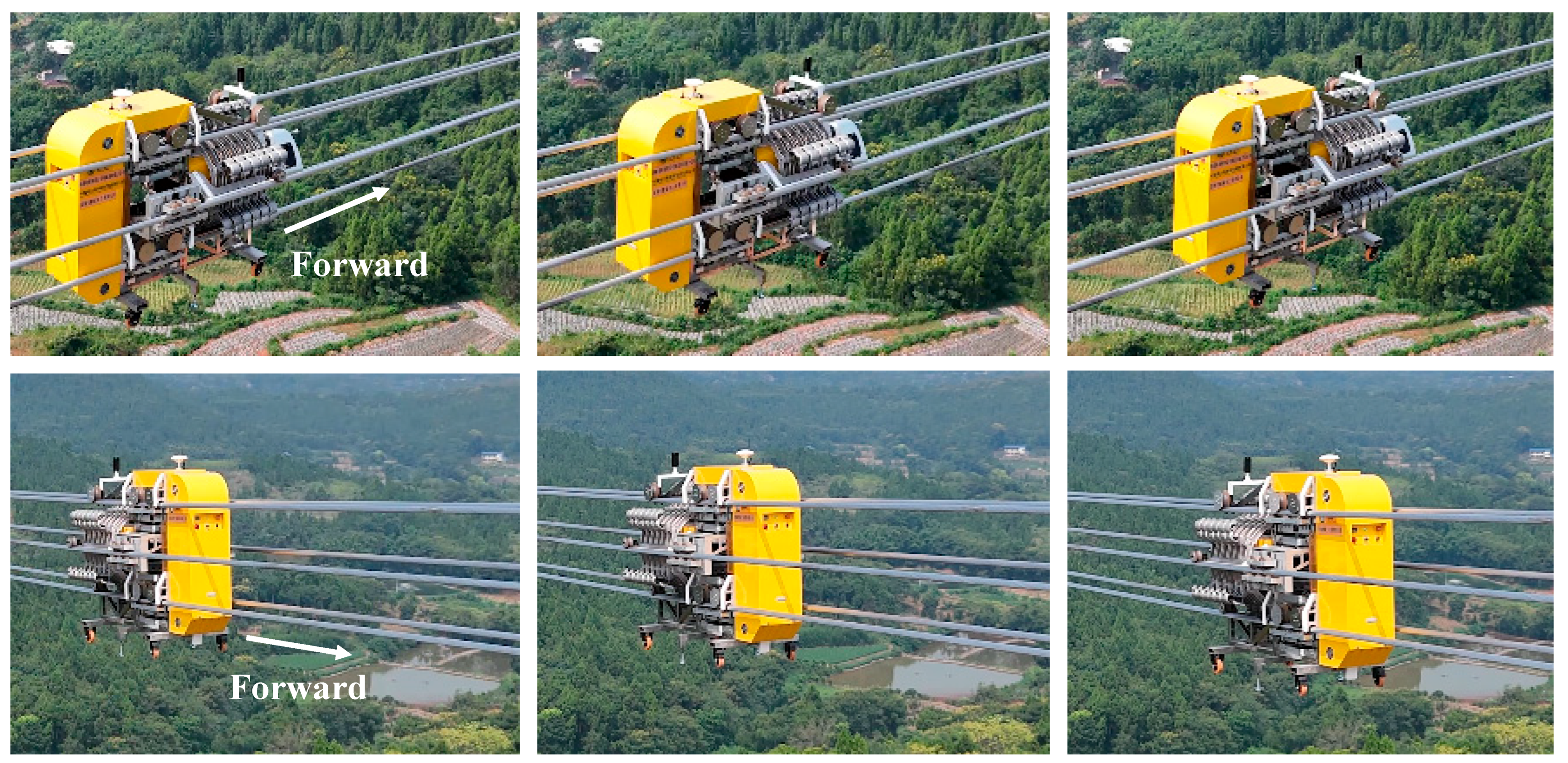
6.1. Forward Capacity Test
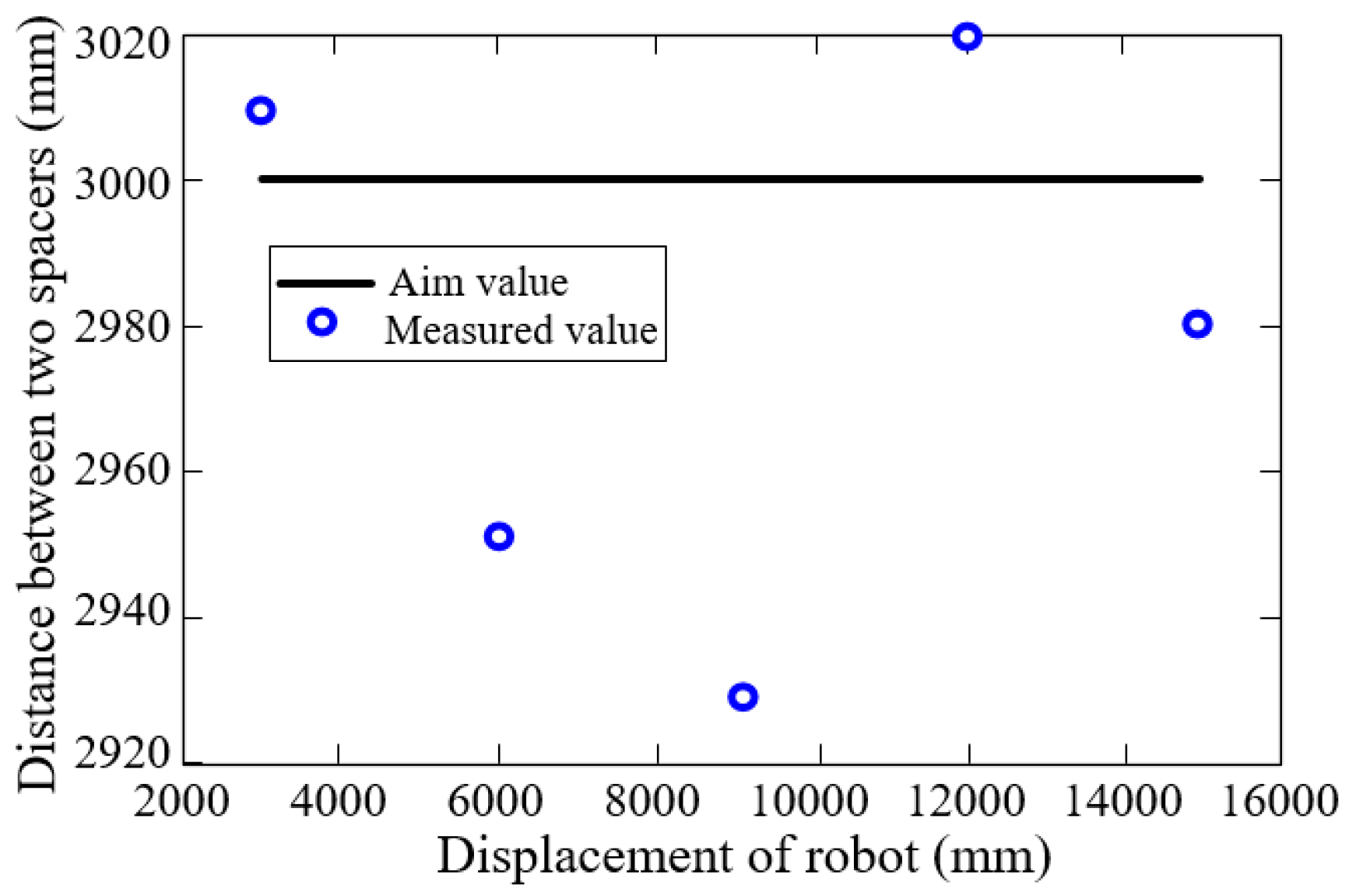
6.2. Installation of Spacers
6.3. Discussion
7. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Agarwal, H.; Mukherjee, S.; Chattaraj, S.; Khan, I.; Prasad, D. Development of quad spacer damper to suppress oscillation in 765 kV transmission line. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020; pp. 1–6. [Google Scholar]
- Lee, H.K. Importance of the Spacer-Damper Installation in Overhead Lines. In Proceedings of the KIEE Conference, Kunming, China, 18–20 July 2005; The Korean Institute of Electrical Engineers: Seoul, Republic of Korea; pp. 46–48. [Google Scholar]
- Disyadej, T.; Kwanmuang, S.; Muneesawang, P.; Promjan, J.; Poochinapan, K. Smart transmission line maintenance and inspection using mobile robots. Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 493–500. [Google Scholar] [CrossRef]
- Bahrami, M.R.; Abed, S.A. Mechanical challenges of electrical transmission lines inspection robot. IOP Conf. Ser. Mater. Sci. Eng. 2020, 709, 022099. [Google Scholar] [CrossRef]
- Li, X.; Li, Z.; Wang, H.; Li, W. Unmanned aerial vehicle for transmission line inspection: Status, standardization, and perspectives. Front. Energy Res. 2021, 9, 713634. [Google Scholar] [CrossRef]
- Luo, Y.; Yu, X.; Yang, D.; Zhou, B. A survey of intelligent transmission line inspection based on unmanned aerial vehicle. Artif. Intell. Rev. 2023, 56, 173–201. [Google Scholar] [CrossRef]
- Meng, D.; Lu, B.; Li, A.; Yin, J.; Li, Q. Pressure observer based adaptive dynamic surface control of pneumatic actuator with long transmission lines. Appl. Sci. 2019, 9, 3621. [Google Scholar] [CrossRef]
- Siravuru, A.; Shah, S.V.; Krishna, K.M. An optimal wheel-torque control on a compliant modular robot for wheel-slip minimization. Robotica 2017, 35, 463–482. [Google Scholar] [CrossRef]
- Moraitis, M.; Vaiopoulos, K.; Balafoutis, A.T. Design and implementation of an urban farming robot. Micromachines 2022, 13, 250. [Google Scholar] [CrossRef]
- Gao, Y.; Song, G.; Li, S.; Zhen, F.; Chen, D.; Song, A. LineSpyX: A power line inspection robot based on digital radiography. IEEE Robot. Autom. Lett. 2020, 5, 4759–4765. [Google Scholar] [CrossRef]
- Zorić, F.; Flegarić, S.; Vasiljević, G.; Bogdan, S.; Kovačić, Z. Autonomous Installation of Electrical Spacers on Power Lines Using Magnetic Localization and Special End Effector. Machines 2023, 11, 510. [Google Scholar] [CrossRef]
- Richard, P.-L.; Morin, F.; Lepage, M.; Hamelin, P.; Lambert, G.; Sartor, A.; Hebert, C.; Pouliot, N. Inside lineranger: Mechanism design to optimize operation and performances of powerline inspection robot. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; pp. 8157–8163. [Google Scholar]
- Qin, X.; Wu, G.; Lei, J.; Fan, F.; Ye, X.; Mei, Q. A novel method of autonomous inspection for transmission line based on cable inspection robot lidar data. Sensors 2018, 18, 596. [Google Scholar] [CrossRef]
- Song, Y.; Wang, H.; Zhang, J. A vision-based broken strand detection method for a power-line maintenance robot. IEEE Trans. Power Deliv. 2014, 29, 2154–2161. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, H.; Li, Z.; He, W.; Wang, Z.; Guo, T. Research and application of automatic walking marking robot for overhead transmission line. In Proceedings of the International Conference on Computer Application and Information Security (ICCAIS 2023), Wuhan, China, 8 April 2024; SPIE: Bellingham, WA, USA, 2024; Volume 13090, pp. 1050–1057. [Google Scholar]
- Guo, J.; Yang, Z.; Karkee, M.; Duan, J.; He, Y. Robotization of banana de-handing under multi-constraint scenarios: Challenges and future directions. Artif. Intell. Agric. 2025, 15, 1–11. [Google Scholar] [CrossRef]
- Espinosa Peralta, P.; Palomino-Díaz, V.; Rodríguez Herrerías, P.; Rodríguez del Castillo, C.; Pedraza Cubero, C.M.; Yuste, J.P.; Aparicio Cillán, P.; Mesía López, R.; Águila Rodríguez, G.; Fernández Franco, V.P. ROSE: Robot for Automatic Spacer Installation in Overhead Power Lines. In Iberian Robotics Conference; Springer International Publishing: Cham, Switzerland, 2022; pp. 325–337. [Google Scholar]
- Wu, Z.; Zhang, J.; Chen, H.; Huang, Z. Development on robot installation using quad spacer damper. In Proceedings of the International Conference on Artificial Intelligence, Virtual Reality, and Visualization (AIVRV 2021), Sanya, China, 16 December 2021; SPIE: Bellingham, WA, USA, 2021; Volume 12153, pp. 265–272. [Google Scholar]
- Alhassan, A.B.; Zhang, X.; Shen, H.; Xu, H. Power transmission line inspection robots: A review, trends and challenges for future research. Int. J. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar] [CrossRef]
- Mostashfi, A.; Fakhari, A.; Ali Badri, M. A novel design of inspection robot for high-voltage power lines. Ind. Robot Int. J. 2014, 41, 166–175. [Google Scholar] [CrossRef]
- Zhang, T.; Dai, J. Electric power intelligent inspection robot: A review. J. Phys. Conf. Series. 2021, 1750, 012023. [Google Scholar] [CrossRef]
- Zhu, Q.; Guan, X.; Yu, B.; Zhang, J.; Ba, K.; Li, X.; Xu, M.; Kong, X. Overview of structure and drive for wheel-legged robots. Robot. Auton. Syst. 2024, 181, 104777. [Google Scholar] [CrossRef]
- Pussente, G.A.N.; de Aguiar, E.P.; Marcato, A.L.M.; Pinto, M.F. UAV Power Line Tracking Control Based on a Type-2 Fuzzy-PID Approach. Robotics 2023, 12, 60. [Google Scholar] [CrossRef]
- Debenest, P.; Guarnieri, M.; Takita, K.; Fukushima, E.F.; Hirose, S.; Tamura, K.; Kimura, A.; Kubokawa, H.; Iwama, N.; Shiga, F. Expliner-Robot for inspection of transmission lines. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 3978–3984. [Google Scholar]
- Rui, G.; Feng, Z.; Lei, C.; Jun, Y. A mobile robot for inspection of overhead transmission lines. In Proceedings of the 2014 3rd International Conference on Applied Robotics for the Power Industry, Foz do Iguassu, Brazil, 14–16 October 2014; pp. 1–3. [Google Scholar]
- Zhu, A.; Tu, Y.; Zheng, W.; Shen, H.; Zhang, X. Design and implementation of high-voltage transmission line inspection and foreign bodies removing robot. In Proceedings of the 2018 15th International Conference on Ubiquitous Robots (UR), Honolulu, HI, USA, 26–30 June 2018; pp. 852–856. [Google Scholar]
- Gulzar, M.A.; Kumar, K.; Javed, M.A.; Sharif, M. High-voltage transmission line inspection robot. In Proceedings of the 2018 International Conference on Engineering and Emerging Technologies (ICEET), Lahore, Pakistan, 22–23 February 2018; pp. 1–7. [Google Scholar]
- Chen, M.; Cao, Y.; Tian, Y.; Li, E.; Liang, Z.; Tan, M. A passive compliance obstacle-crossing robot for power line inspection and maintenance. IEEE Robot. Autom. Lett. 2023, 8, 2772–2779. [Google Scholar] [CrossRef]
- Seok, K.H.; Kim, Y.S. A state of the art of power transmission line maintenance robots. J. Electr. Eng. Technol. 2016, 11, 1412–1422. [Google Scholar] [CrossRef]
- Toussaint, K.; Pouliot, N.; Montambault, S. Transmission line maintenance robots capable of crossing obstacles: State-of-the-art review and challenges ahead. J. Field Robot. 2009, 26, 477–499. [Google Scholar] [CrossRef]
- Pouliot, N.; Montambault, S. LineScout Technology: From inspection to robotic maintenance on live transmission power lines. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1034–1040. [Google Scholar]
- Pan, J.; Hu, C.; Jiang, M.; Ma, Y.; Meng, F.; He, X.; Liu, C. Development of a Spacer Bar Installing Robot for Six-Split Transmission Lines. In Proceedings of the 8th International Conference on Computing, Control and Industrial Engineering (CCIE2024), Singapore, 21–22 June 2024; pp. 11–17. [Google Scholar]
- Hatibovic, A. Derivation of equations for conductor and sag curves of an overhead line based on a given catenary constant. Period. Polytech. Electr. Eng. Comput. Sci. 2014, 58, 23–27. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameters |
|---|---|
| Weight of robot G | 510 kg |
| Weight of spacer G1 | 20 kg |
| Maximum moving speed V | 200 mm/s |
| Maximum slope moving capability | 15° |
| Position accuracy | ±10 mm |
| Dimension | 2490 mm × 106 mm × 165 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, J.; Cheng, Y.; Hu, C.; Jiang, M.; Ma, Y.; Meng, F.; Shi, Q. The Innovative Design and Performance Testing of a Mobile Robot for the Automated Installation of Spacers on Six-Split Transmission Lines. Machines 2025, 13, 432. https://doi.org/10.3390/machines13050432
Pan J, Cheng Y, Hu C, Jiang M, Ma Y, Meng F, Shi Q. The Innovative Design and Performance Testing of a Mobile Robot for the Automated Installation of Spacers on Six-Split Transmission Lines. Machines. 2025; 13(5):432. https://doi.org/10.3390/machines13050432
Chicago/Turabian StylePan, Jie, Yongfeng Cheng, Chunhua Hu, Ming Jiang, Yong Ma, Fanhao Meng, and Qiang Shi. 2025. "The Innovative Design and Performance Testing of a Mobile Robot for the Automated Installation of Spacers on Six-Split Transmission Lines" Machines 13, no. 5: 432. https://doi.org/10.3390/machines13050432
APA StylePan, J., Cheng, Y., Hu, C., Jiang, M., Ma, Y., Meng, F., & Shi, Q. (2025). The Innovative Design and Performance Testing of a Mobile Robot for the Automated Installation of Spacers on Six-Split Transmission Lines. Machines, 13(5), 432. https://doi.org/10.3390/machines13050432