


Design, Assembly and Control of a Differential/Omnidirectional Mobile Robot through Additive Manufacturing

 , ,
, ,  , and
, and 
Abstract
1. Introduction
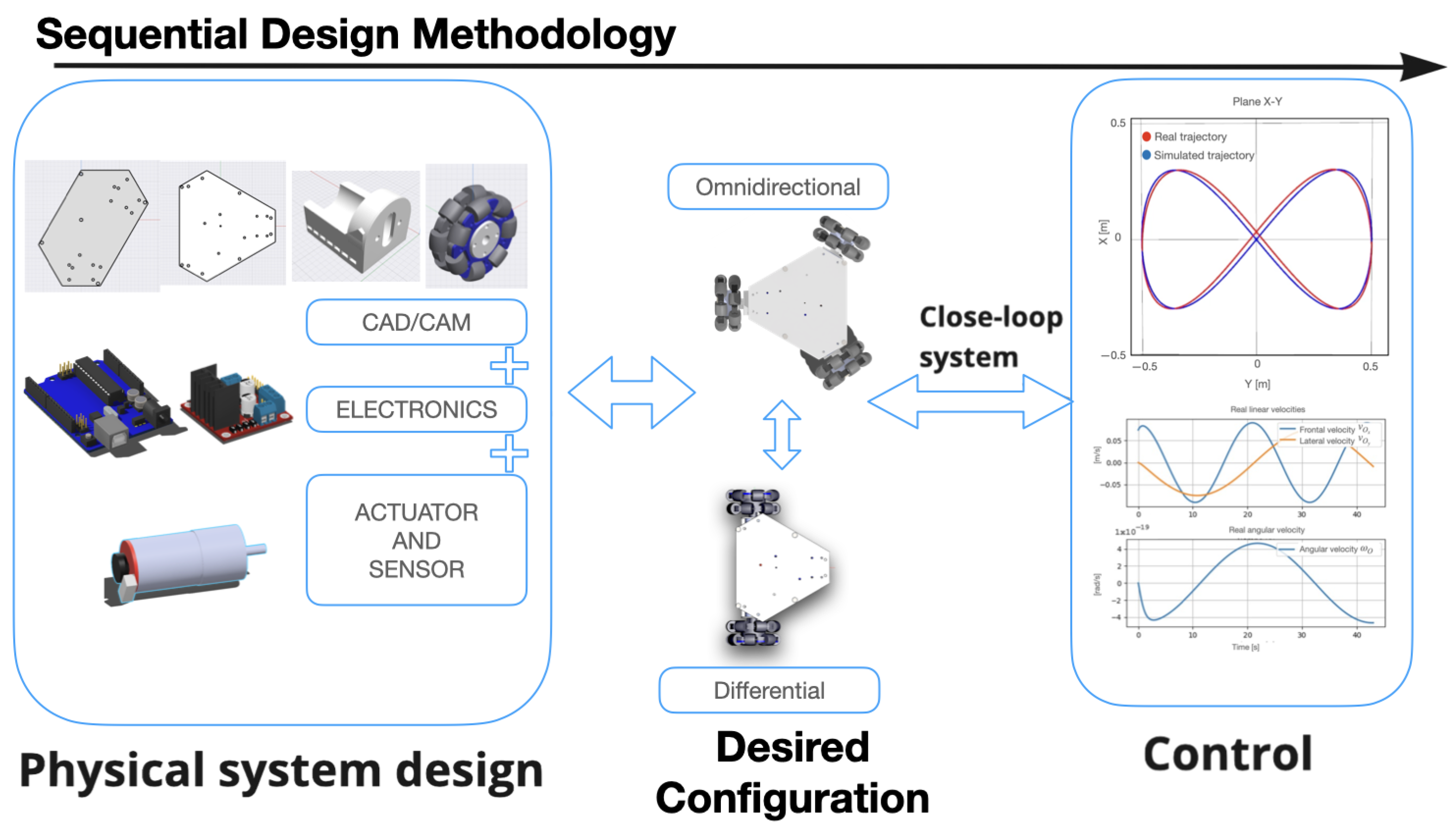
- To implement a sequential mechatronic design methodology via computing design (CAD, electronics, and control) to obtain a functional multi-configurable mobile robot.
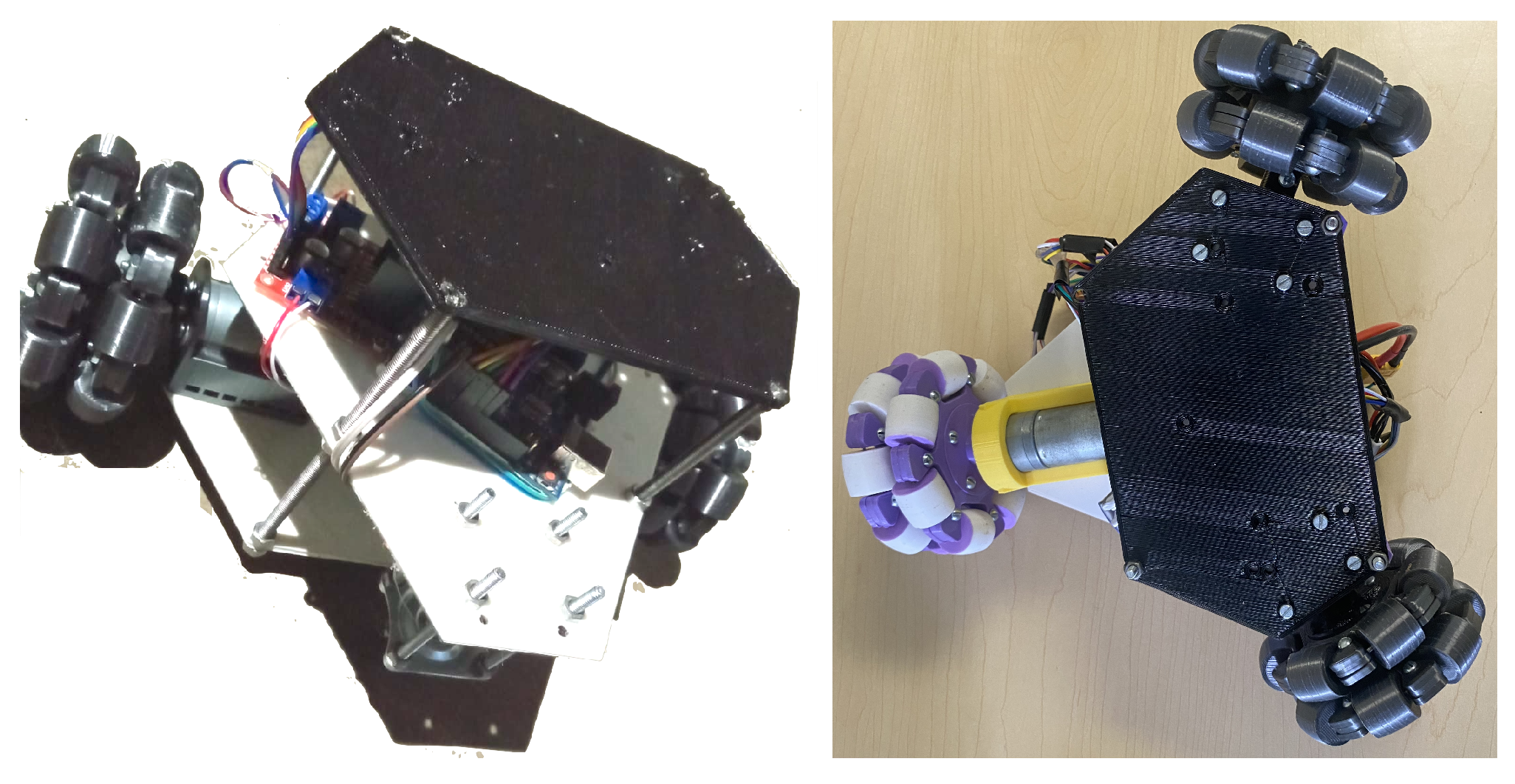
- Employ additive manufacturing techniques for designing and building a differential-drive mobile robot prototype that can transform into an omnidirectional mobile robot by modifying the wheel orientation. The change from one configuration to another is conducted manually as a first step and proof of concept.
- The prototype’s design and construction will be validated by implementing two levels of control. In this sense, real-time experiments determine the robot’s performance.
2. Methodology
- The mechanical structure resistance material can bear three levels with electronic devices in each one.
- The structure dimensions have to follow the electronic devices, wiring, sensors, motors, and moving mechanical elements.
- Electric motors have to be chosen considering all the weight, inertia, and maximum desired speed of the mobile robot.
- The power supply has to be designed to give the necessary current for all the electronic devices, including sensors, electronic boards, motors, and future devices, for at least one complete mobile robotic task.
3. Design and Instrumentation
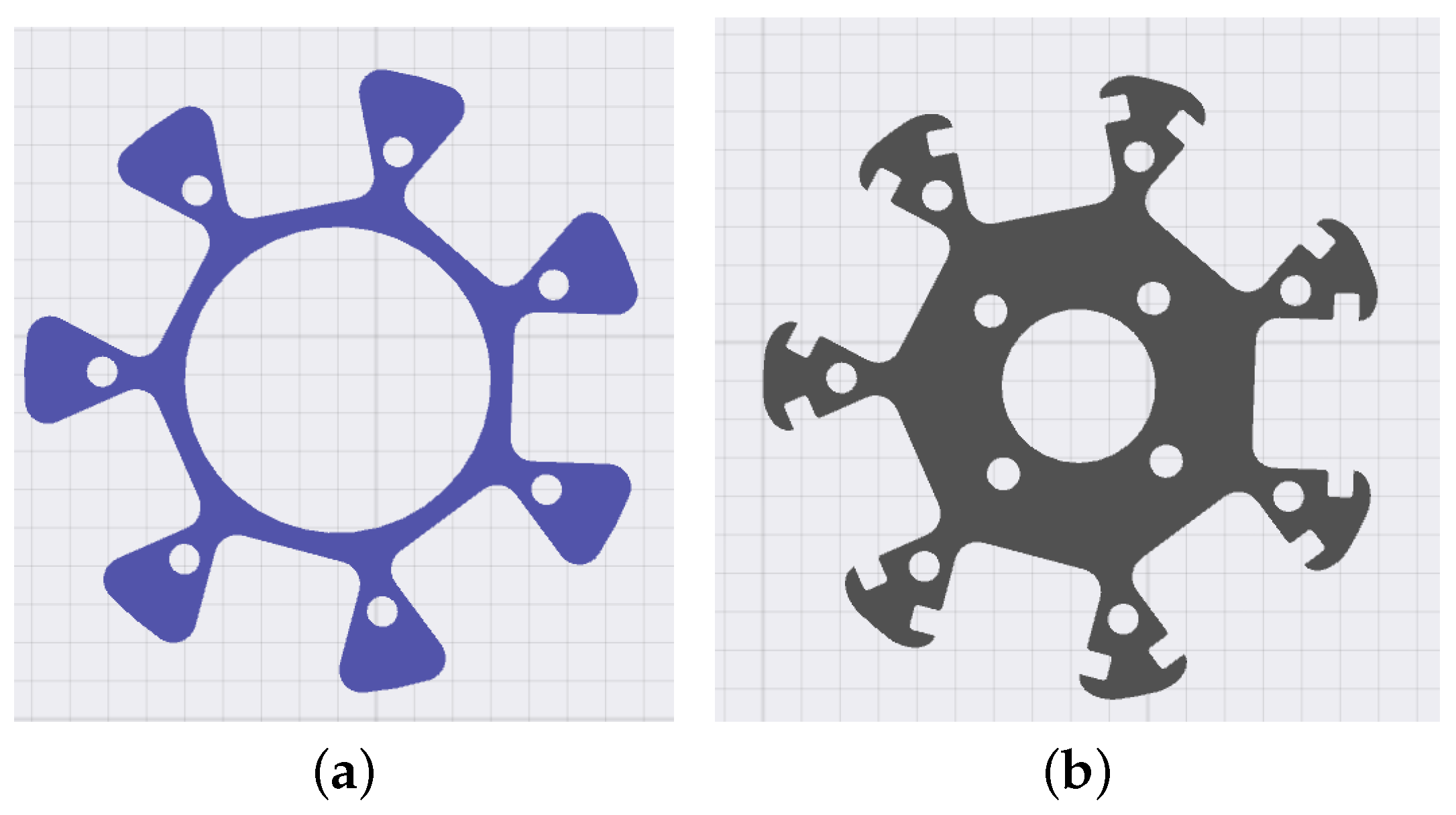
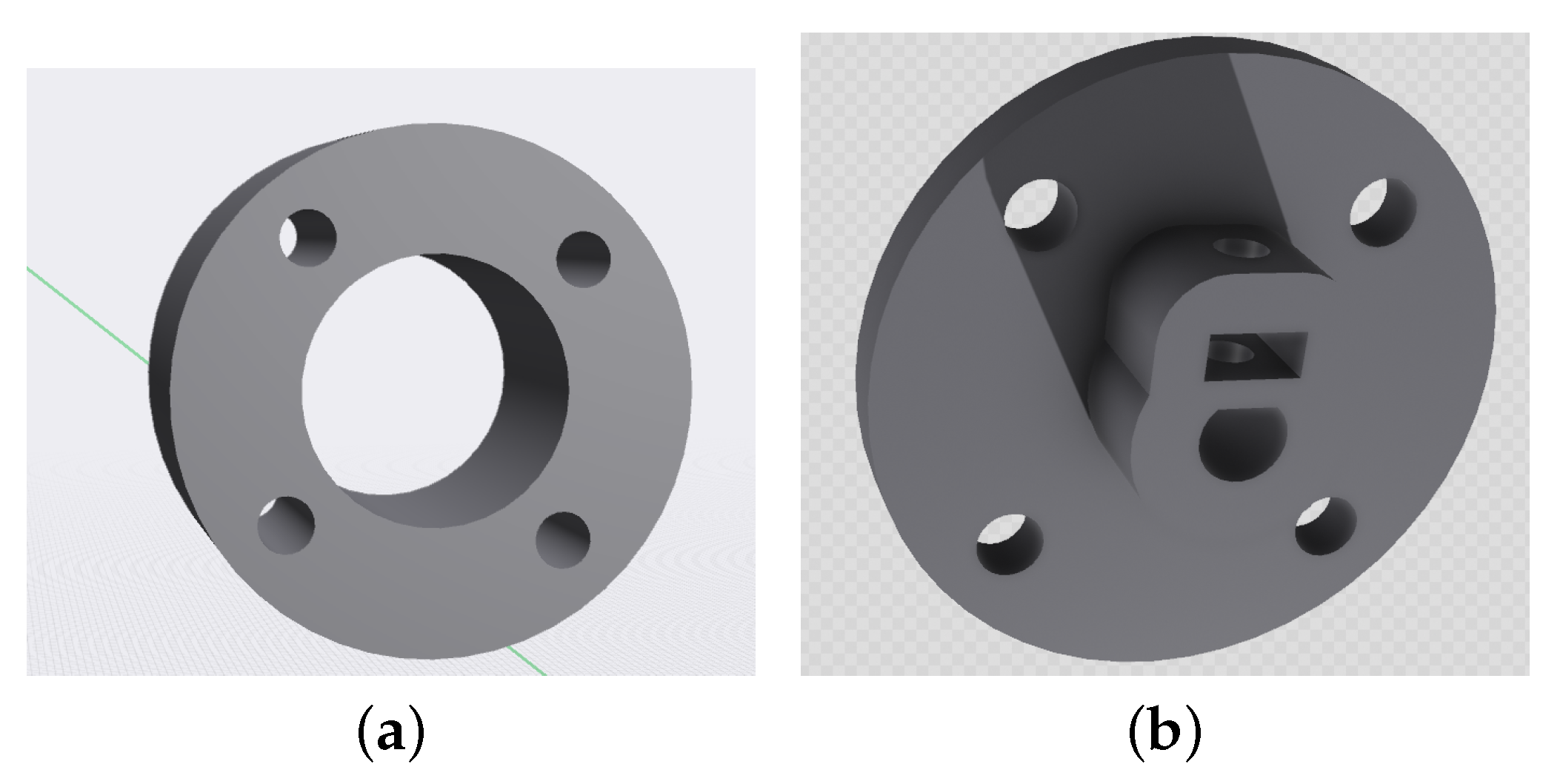
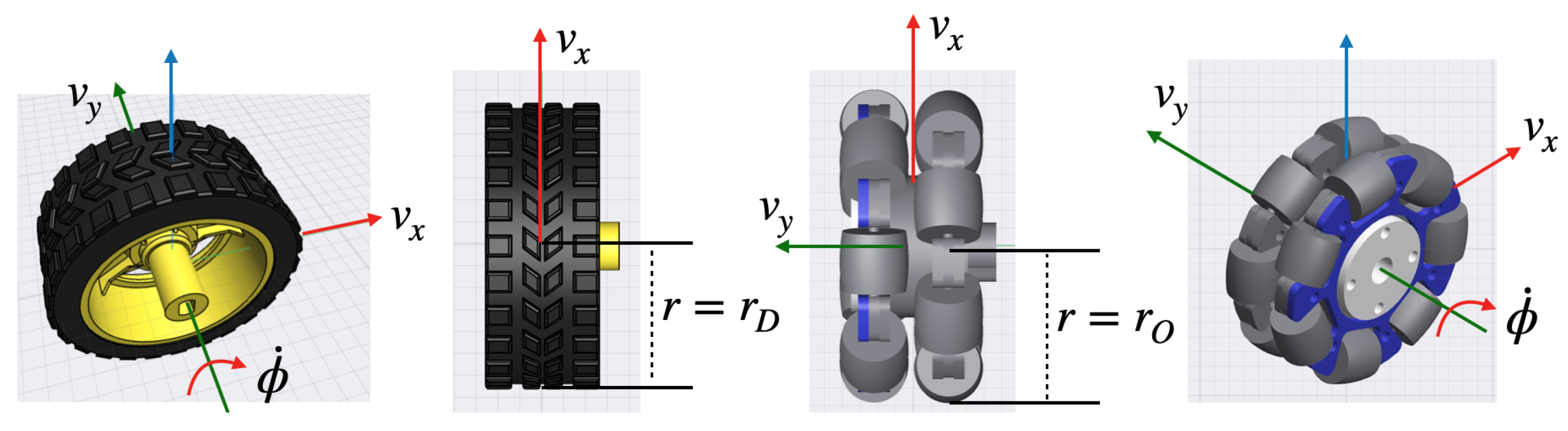
3.1. Wheels
- Have rollers that allow a sideways motion.
- At least one roller must always be in contact with the ground.
- The geometry of the wheels complies with the equation , where R is the outer radius and is the geometric center of the wheel.
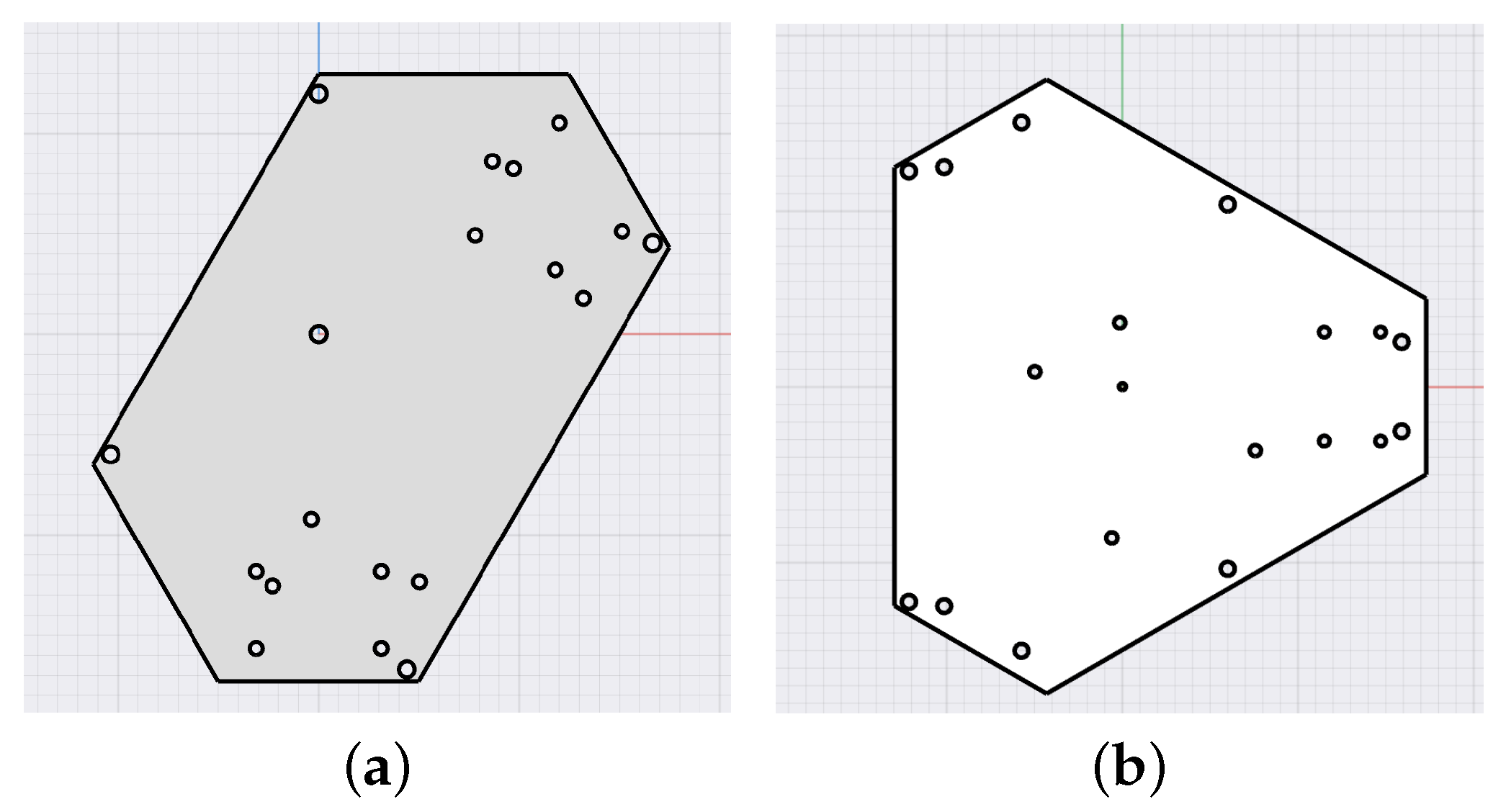
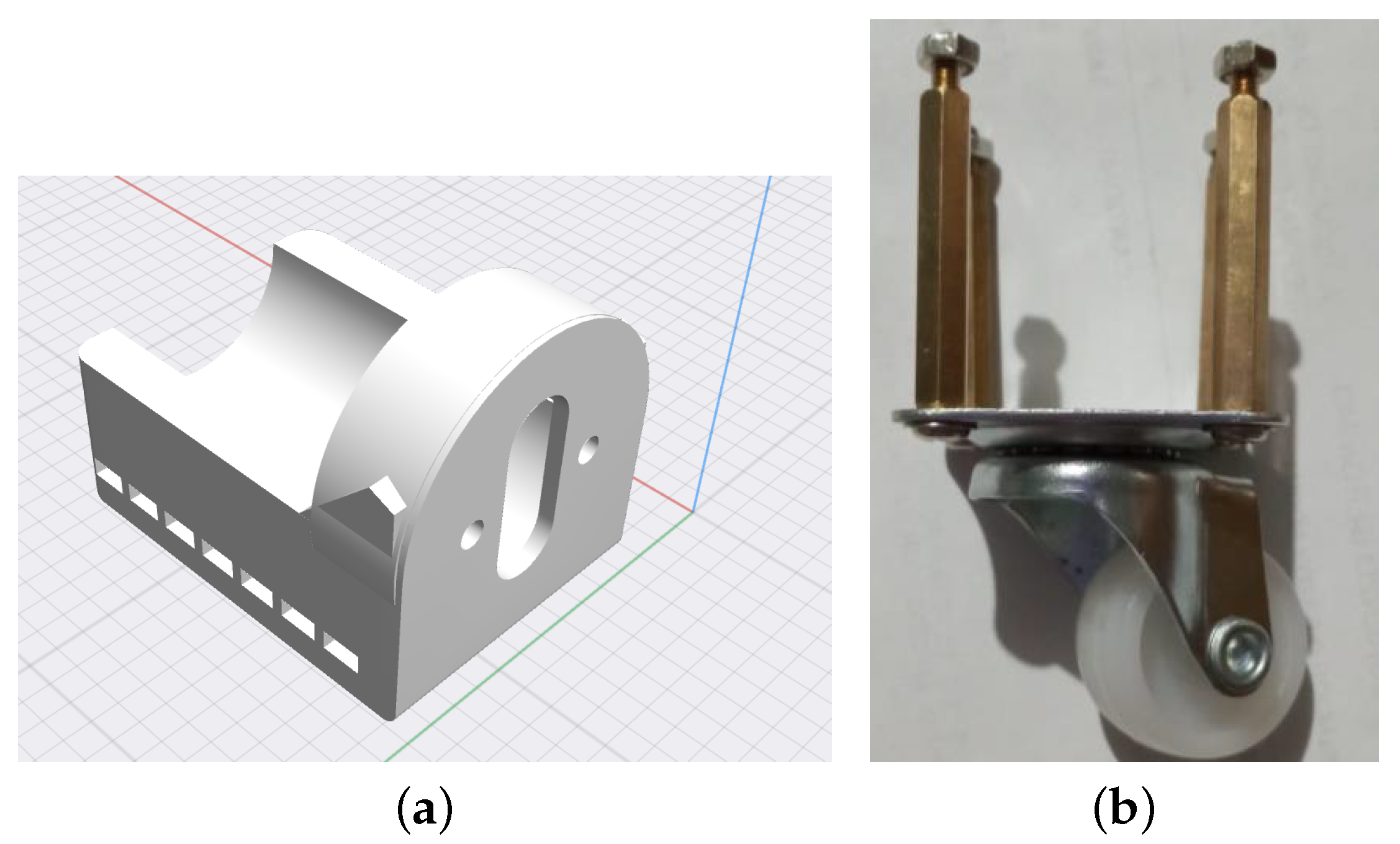
3.2. Base and Shell Design
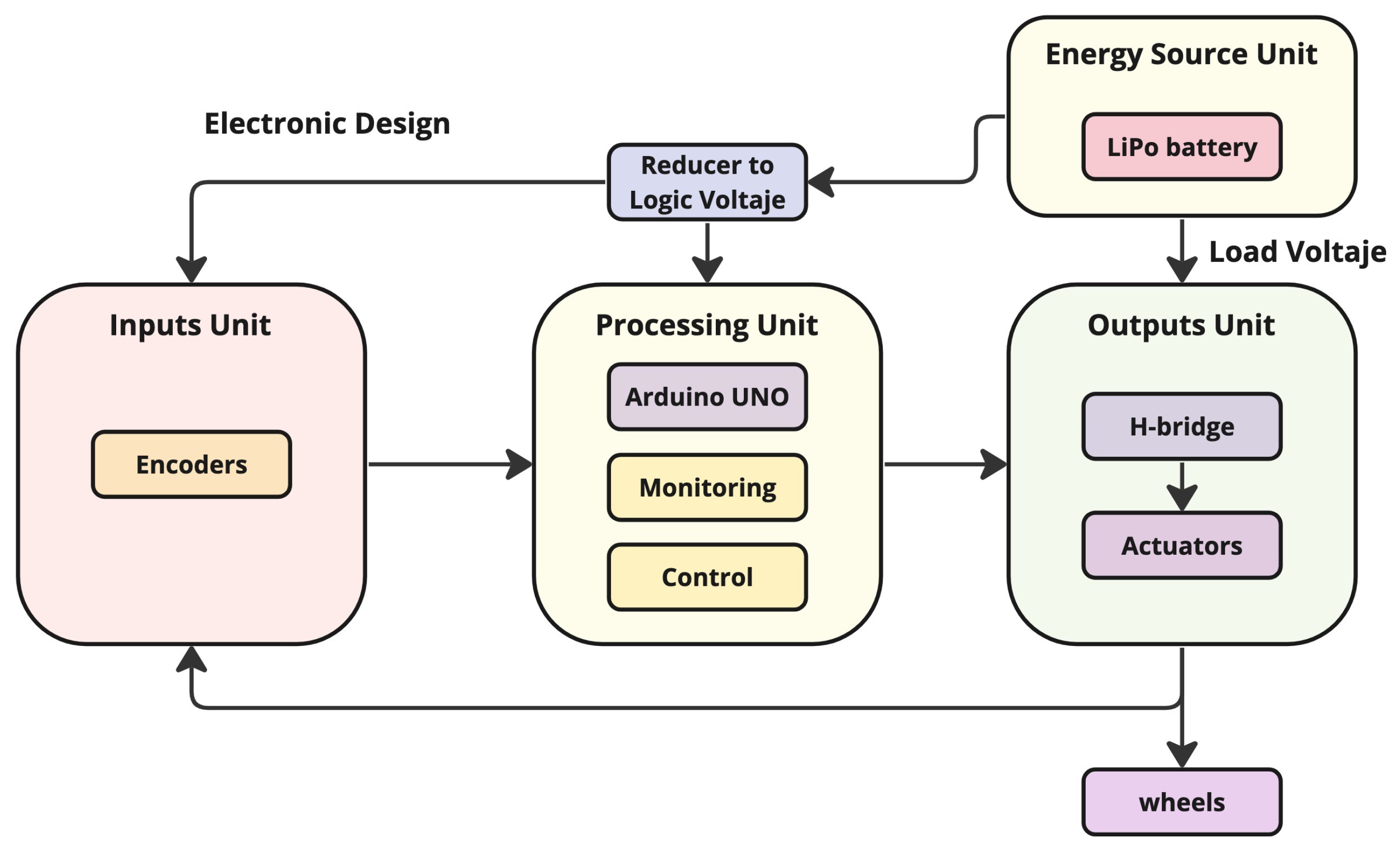
3.3. Electronic Design
3.4. Actuator Selection
3.5. Processing and Energy Source Units
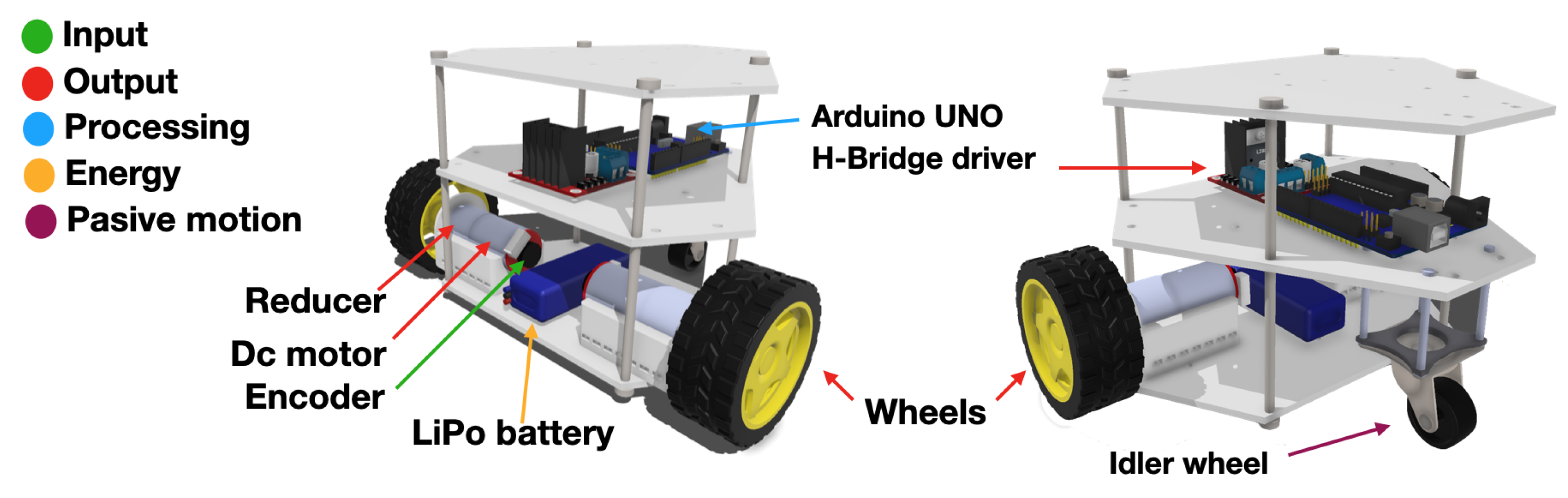
3.6. Prototype Assembly
- The first level has the battery, motors, and supports.
- The second level has electronic devices such as Arduino, L298N H bridge, instrumentation, and cables.
- The third level is designated for all the sensors that will be placed in the future.
- All the levels and motors are assembled by using four 130 mm screws, twenty mm screws, and four 63 mm screws for the structure base robot. Also, four 40 mm screws, twenty 15 mm screws, and fifty-one nails are used for the shaft of each roller.
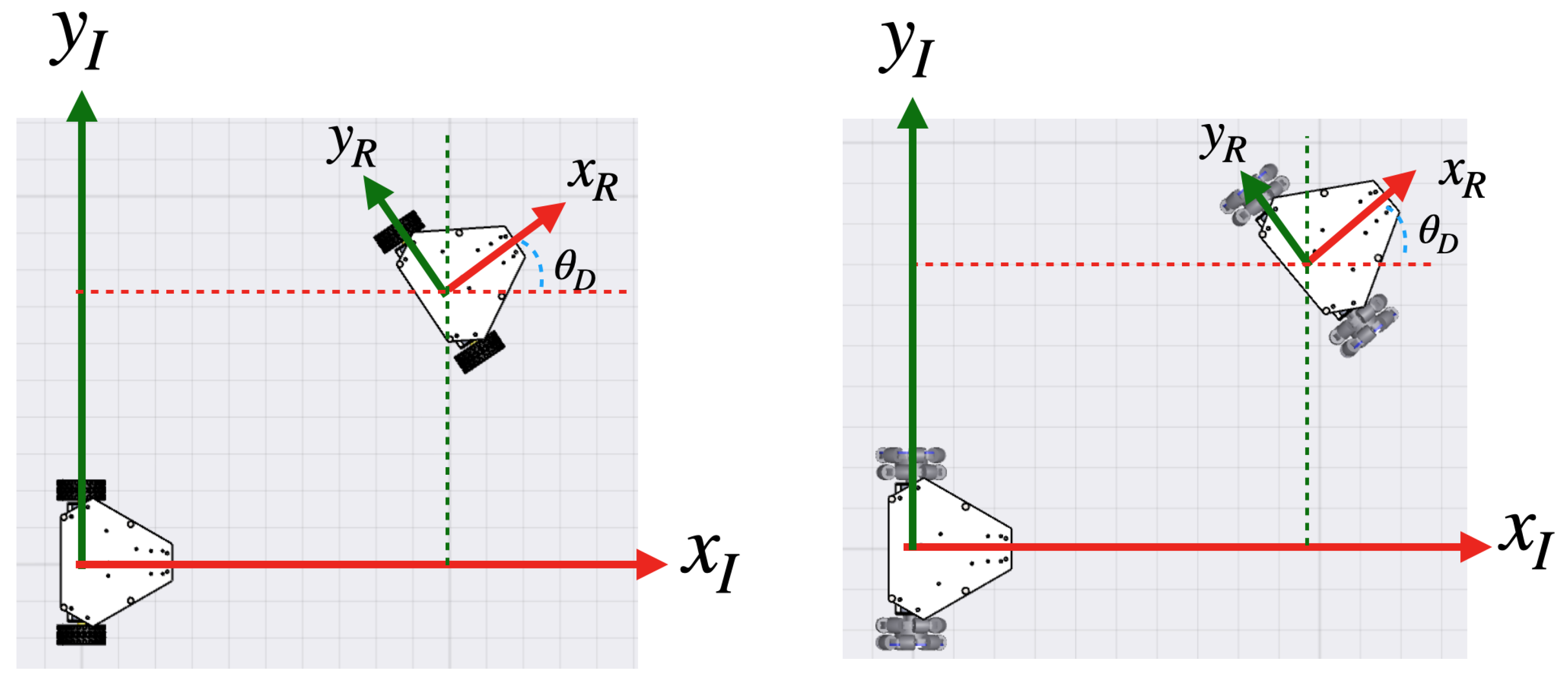
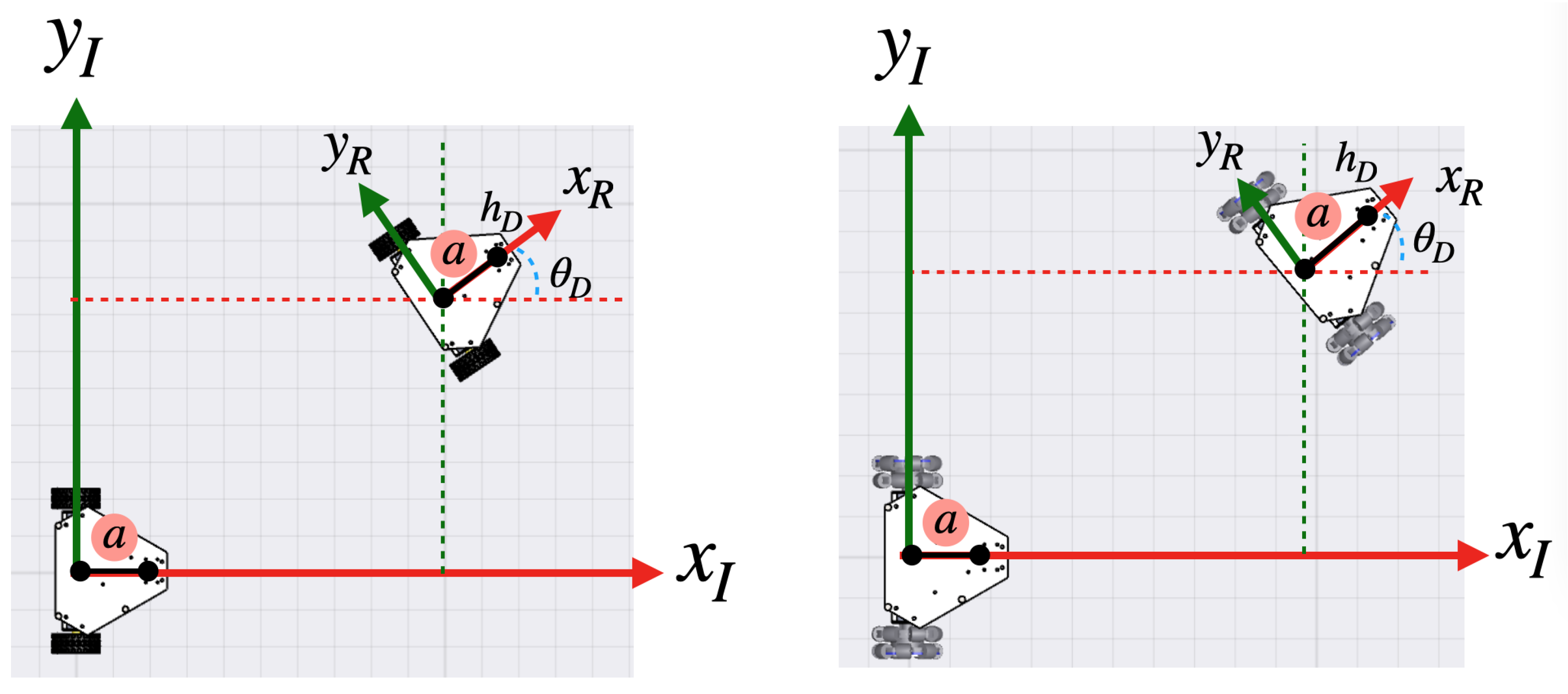
4. Kinematic Model
4.1. Differential Configuration
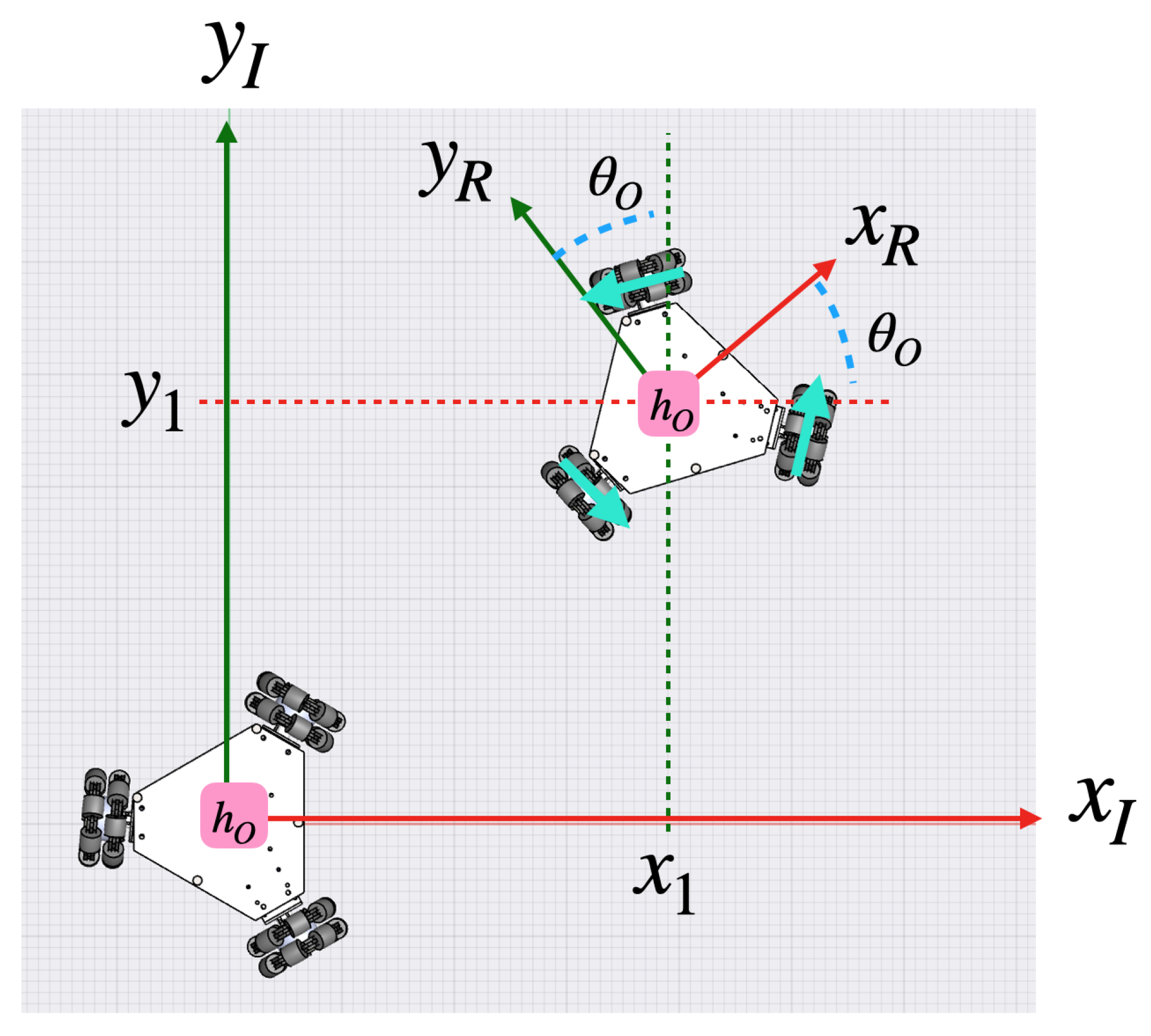
4.2. Omnidirectional Configuration
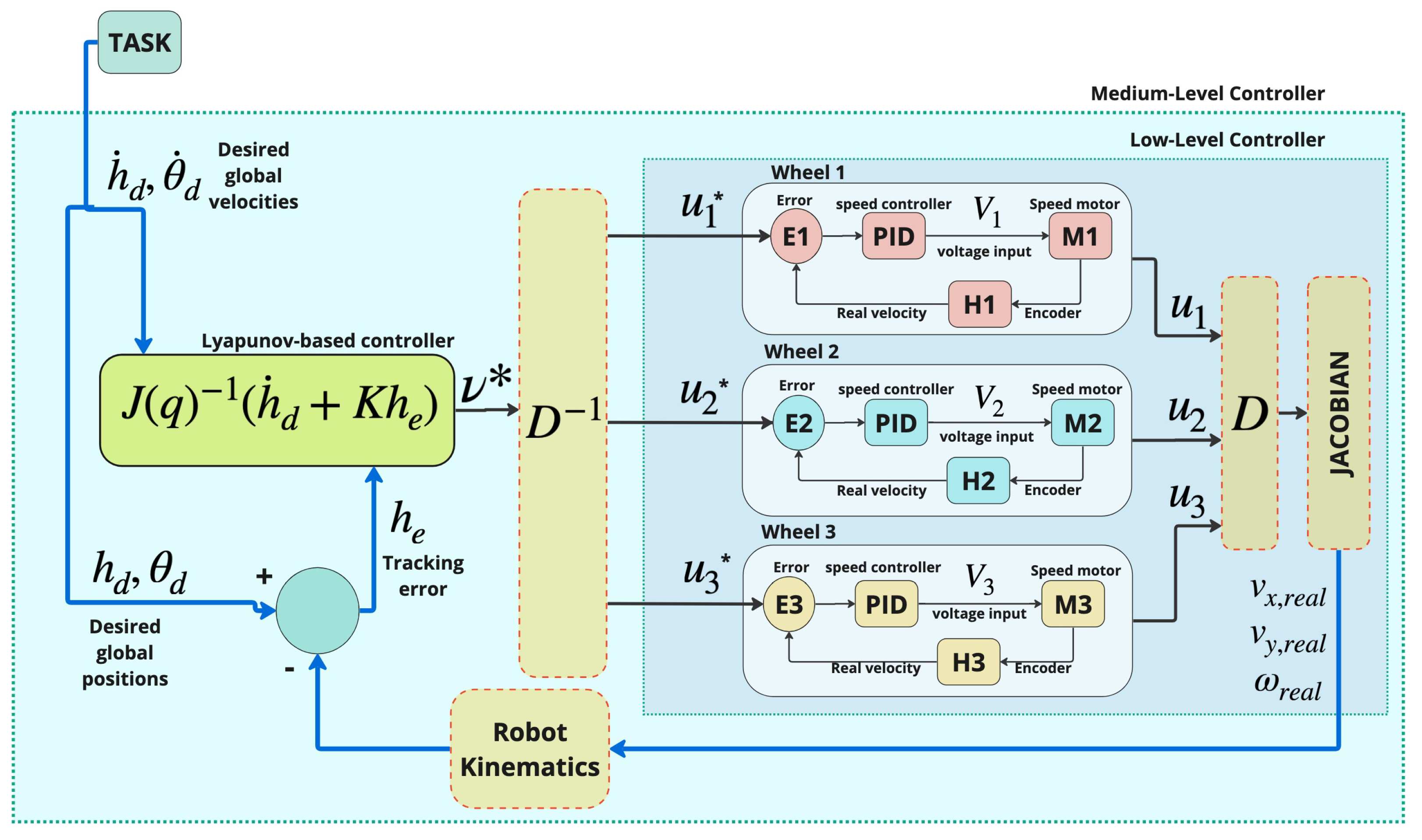
5. Control Strategy
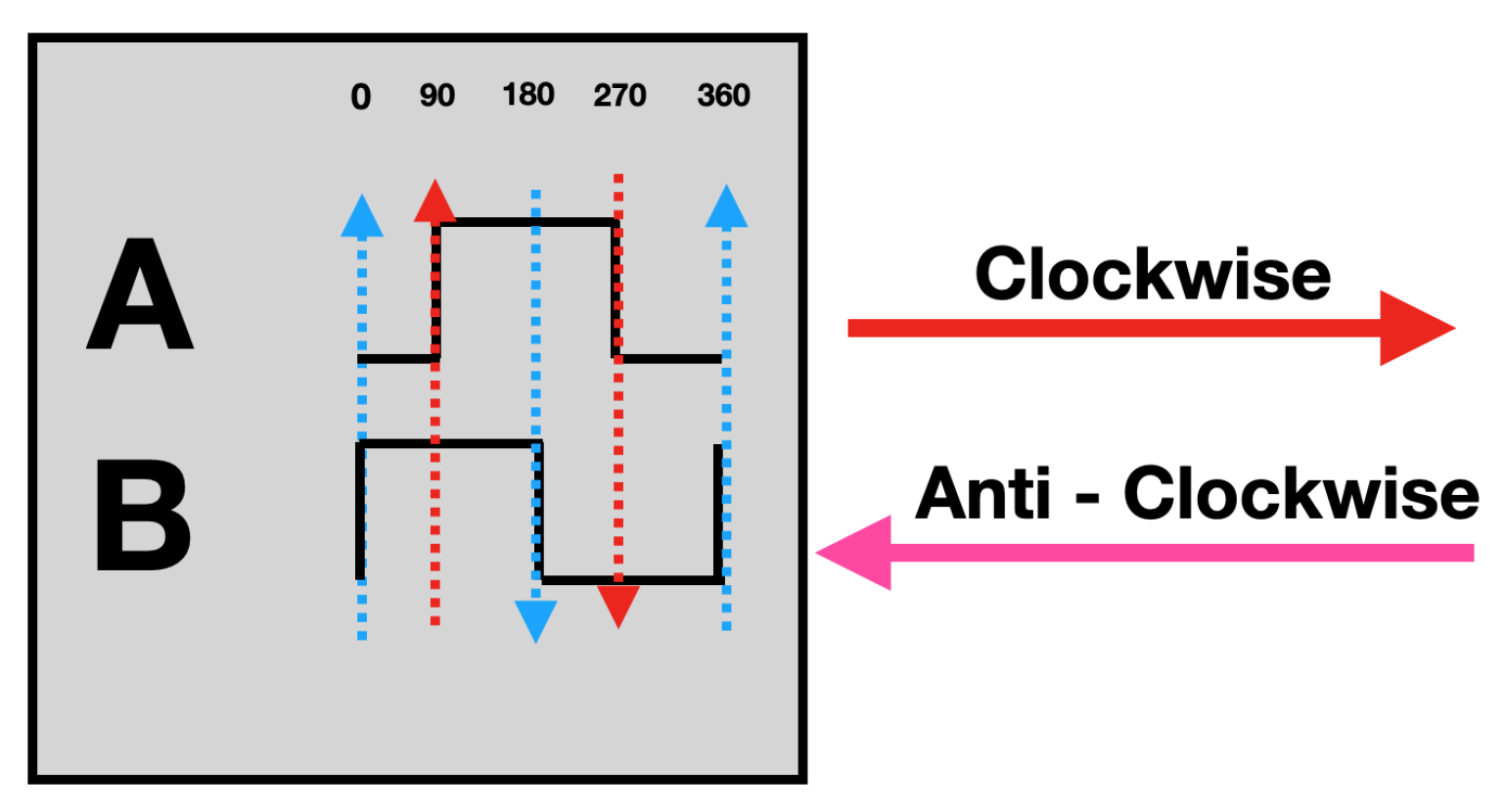
5.1. Low-Level Control
5.2. Medium-Level Control
5.3. Stability Analysis
6. Real-Time Experiments
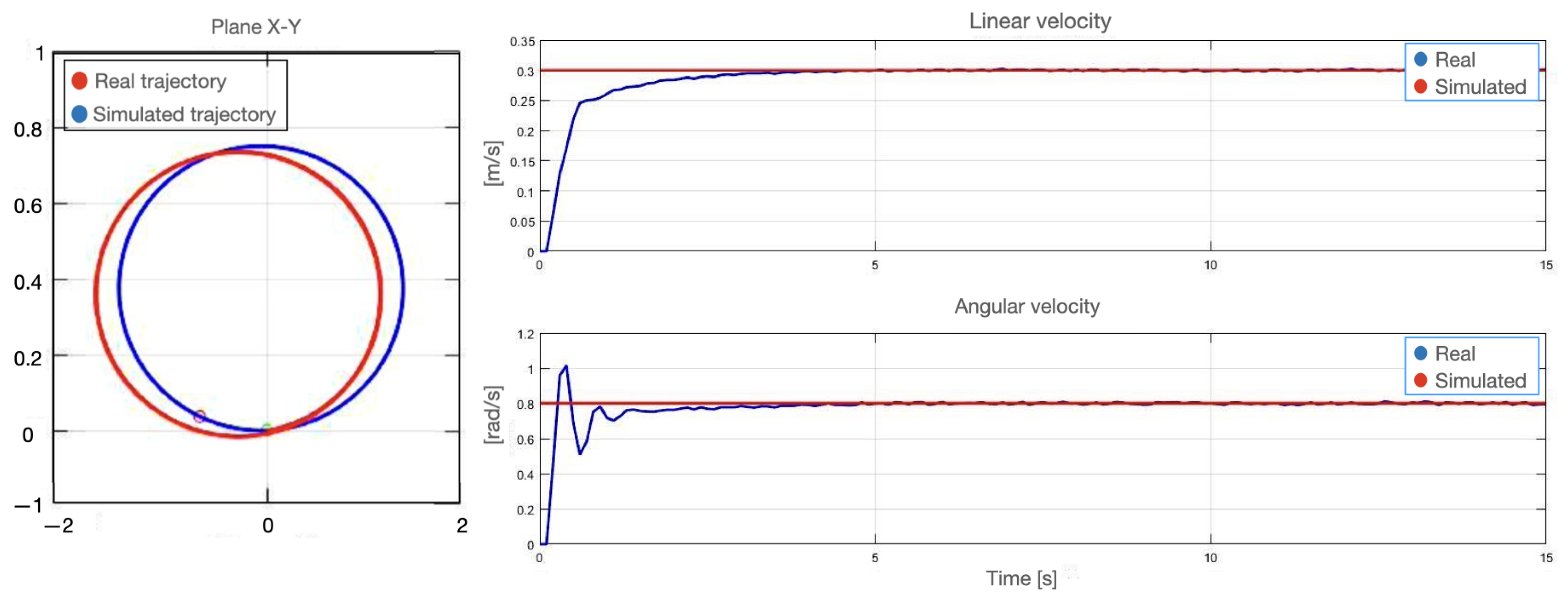
6.1. Experiment with the Differential Configuration
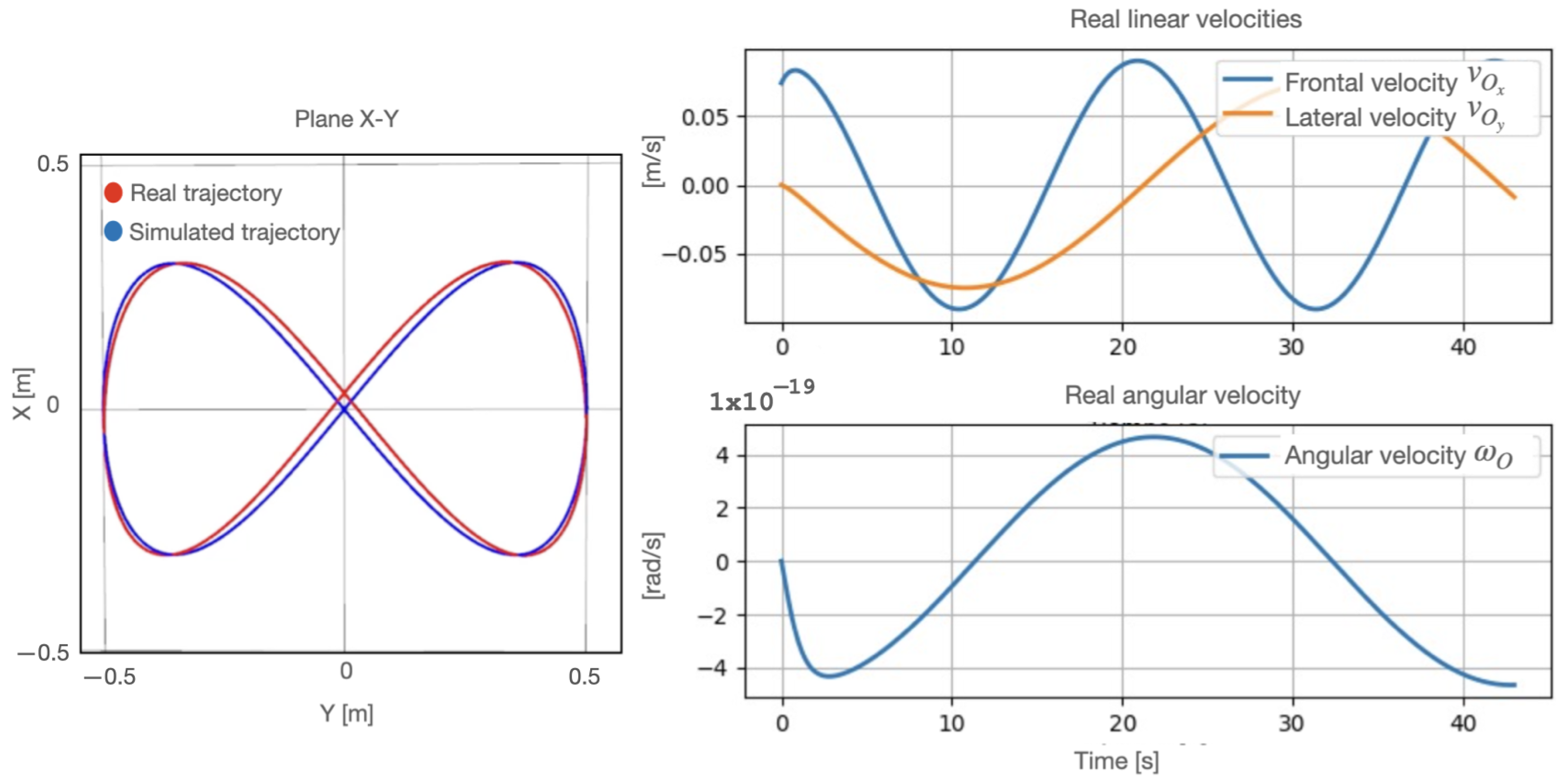
6.2. Experiment with the Omnidirectional Configuration
7. Conclusions
- Using AM technology and the mechatronic design area allowed us to build a multi-configurable mobile robot that can change from a differential to an omnidirectional configuration by manually orienting the wheels.
- Because the two types of mobile robots addressed in this work have a different kinematic model, a control scheme was proposed to validate their design and construction, consisting of two levels of hierarchy: low and medium levels of control.
- Based on the experiments, it is concluded that, for robots to follow a trajectory in Cartesian space, it is necessary to use two control levels: the low level to control the speed of the wheels and the medium level to control the robot’s attitude.
- Implement a mechanism that allows autonomous switching between both configurations.
- Design robust control strategies that deal with external disturbances and communication delays.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| GPS | Global Positioning System |
| FMEA | Failure Mode and Effect Analysis |
| IoT | Internet of Things |
| AM | Additive Manufacturing |
| STL | stereolithography |
| CAD | Computer Assisted Design |
| CAM | Computer Assisted Fabrication |
| ABS | Acrylonitrile Butadiene Styrene |
| PLA | Polylactic Acid |
| ppr | pulses per revolution |
| BLDC | Brushless Direct Current |
| DC | Direct current |
| PWM | Pulse Width Modulation |
| PID | Proportional-Integral-Derivative |
References
- Russo, M.; Ceccarelli, M. A Survey on Mechanical Solutions for Hybrid Mobile Robots. Robotics 2020, 9, 32. [Google Scholar] [CrossRef]
- Zhou, Q.; Fang, Z.; Mao, X.; Mai, Q. The Mobile Robot for Garbage Sorting and Handling Based on Machine Vision. In Proceedings of the 2021 IEEE International Conference on Artificial Intelligence, Robotics, and Communication (ICAIRC), Fuzhou, China, 25–27 June 2021; pp. 37–39. [Google Scholar]
- Moubarak, P.; Ben-Tzvi, P. Modular and reconfigurable mobile robotics. Robot. Auton. Syst. 2012, 60, 1648–1663. [Google Scholar] [CrossRef]
- Gonzalez-Gomez, J.; Valero-Gomez, A.; Prieto-Moreno, A.; Abderrahim, M. A new open source 3D-printable mobile robotic platform for education. In Advances in Autonomous Mini Robots; Springer: Berlin/Heidelberg, Germany, 2012; pp. 49–62. [Google Scholar]
- Tătar, M.O.; Cirebea, C.; Mândru, D. Structures of the omnidirectional robots with swedish wheels. Solid State Phenom. 2013, 198, 132–137. [Google Scholar] [CrossRef]
- Zahugi, E.M.H.; Shabani, A.M.; Prasad, T.V. Libot: Design of a low cost mobile robot for outdoor swarm robotics. In Proceedings of the 2012 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Bangkok, Thailand, 27–31 May 2012; pp. 342–347. [Google Scholar] [CrossRef]
- Maddahi, Y.; Maddahi, A.; Monsef, S.M.H. Design improvement of wheeled mobile robots: Theory and experiment. World Appl. Sci. J. 2012, 16, 263–274. [Google Scholar]
- Annadurai, V.; Reshvanth, V.; Santhanam, V.; Thulasiram, S.; Venusamy, K.; Sathyanarayanan, V. Design and Fabrication of Multi-Purpose Surveillance Mobile Robot. In Proceedings of the 2023 Eighth International Conference on Science Technology Engineering and Mathematics (ICONSTEM), Chennai, India, 6–7 April 2023; pp. 1–5. [Google Scholar]
- Tomik, F.; Nudehi, S.; Flynn, L.L.; Mukherjee, R. Design, fabrication and control of spherobot: A spherical mobile robot. J. Intell. Robot. Syst. 2012, 67, 117–131. [Google Scholar] [CrossRef]
- Rasiya, G.; Shukla, A.; Saran, K. Additive Manufacturing—A Review. Mater. Today Proc. 2021, 47, 6896–6901. [Google Scholar] [CrossRef]
- Rajaguru, K.; Karthikeyan, T.; Vijayan, V. Additive manufacturing–State of art. Mater. Today Proc. 2020, 21, 628–633. [Google Scholar] [CrossRef]
- Gardan, J. Additive manufacturing technologies: State of the art and trends. In Additive Manufacturing Handbook; CRC Press: Boca Raton, FL, USA, 2017; pp. 149–168. [Google Scholar]
- Touri, M.; Kabirian, F.; Saadati, M.; Ramakrishna, S.; Mozafari, M. Additive manufacturing of biomaterials- the evolution of rapid prototyping. Adv. Eng. Mater. 2019, 21, 1800511. [Google Scholar] [CrossRef]
- Khorram Niaki, M.; Nonino, F.; Palombi, G.; Torabi, S.A. Economic sustainability of additive manufacturing: Contextual factors driving its performance in rapid prototyping. J. Manuf. Technol. Manag. 2019, 30, 353–365. [Google Scholar] [CrossRef]
- Lopez Rojas, A.D.; Mendoza-Trejo, O.; Padilla-García, E.A.; Ortiz Morales, D.; Cruz-Villar, C.A.; La Hera, P. Design, rapid manufacturing and modeling of a reduced-scale forwarder crane with closed kinematic chain. Mech. Based Des. Struct. Mach. 2023, 51, 6748–6773. [Google Scholar] [CrossRef]
- Hyndhavi, D.; Murthy, S.B. Rapid Prototyping Technology-Classification and Comparison. Int. Res. J. Eng. Technol. 2017, 4, 3107–3111. [Google Scholar]
- Bahnini, I.; Rivette, M.; Rechia, A.; Siadat, A.; Elmesbahi, A. Additive manufacturing technology: The status, applications, and prospects. Int. J. Adv. Manuf. Technol. 2018, 97, 14–161. [Google Scholar] [CrossRef]
- Pérez, M.; Carou, D.; Rubio, E.M.; Teti, R. Current advances in additive manufacturing. Procedia CIRP 2020, 88, 439–444. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, L.; Zhang, Z.; Cao, J.; Xia, X.; Liu, Y. Integrated modeling for retired mechanical product genes in remanufacturing: A knowledge graph-based approach. Adv. Eng. Inform. 2024, 59, 102254. [Google Scholar] [CrossRef]
- van Amerongen, J. Mechatronic design. Mechatronics 2003, 13, 1045–1066. [Google Scholar] [CrossRef]
- Shah, A. Emerging trends in robotic aided additive manufacturing. Mater. Today Proc. 2022, 62, 7231–7237. [Google Scholar] [CrossRef]
- Mendoza-Trejo, O.; Cruz-Villar, C.A. Robust concurrent design of a 2-DOF collaborative robot (Cobot). IEEE/ASME Trans. Mechatron. 2020, 26, 347–357. [Google Scholar] [CrossRef]
- Prakash, K.S.; Nancharaih, T.; Rao, V.S. Additive Manufacturing Techniques in Manufacturing -An Overview. Mater. Today Proc. 2018, 5, 3873–3882. [Google Scholar] [CrossRef]
- Peta, K.; Wlodarczyk, J.; Maniak, M. Analysis of trajectory and motion parameters of an industrial robot cooperating with a numerically controlled machine tools. J. Manuf. Process. 2023, 101, 1332–1342. [Google Scholar] [CrossRef]
- Xu, S.; Wu, Z.; Shen, T. High-Precision Control of Industrial Robot Manipulator Based on Extended Flexible Joint Model. Actuators 2023, 12, 357. [Google Scholar] [CrossRef]
- Zheng, C.; An, Y.; Wang, Z.; Wu, H.; Qin, X.; Eynard, B.; Zhang, Y. Hybrid offline programming method for robotic welding systems. Robot. Comput.-Integr. Manuf. 2022, 73, 102238. [Google Scholar] [CrossRef]
- Bhatt, P.M.; Malhan, R.K.; Shembekar, A.V.; Yoon, Y.J.; Gupta, S.K. Expanding capabilities of additive manufacturing through use of robotics technologies: A survey. Addit. Manuf. 2020, 31, 100933. [Google Scholar] [CrossRef]
- Outón, J.L.; Villaverde, I.; Herrero, H.; Esnaola, U.; Sierra, B. Innovative Mobile Manipulator Solution for Modern Flexible Manufacturing Processes. Sensors 2019, 19, 5414. [Google Scholar] [CrossRef]
- Dörfler, K.; Dielemans, G.; Lachmayer, L.; Recker, T.; Raatz, A.; Lowke, D.; Gerke, M. Additive Manufacturing using mobile robots: Opportunities and challenges for building construction. Cem. Concr. Res. 2022, 158, 106772. [Google Scholar] [CrossRef]
- Lachmayer, L.; Recker, T.; Raatz, A. Contour Tracking Control for Mobile Robots applicable to Large-scale Assembly and Additive Manufacturing in Construction. Procedia CIRP 2022, 106, 108–113. [Google Scholar] [CrossRef]
- Zhang, K.; Chermprayong, P.; Xiao, F.; Tzoumanikas, D.; Dams, B.; Kay, S.; Kocer, B.B.; Burns, A.; Orr, L.; Alhinai, T.; et al. Aerial additive manufacturing with multiple autonomous robots. Nature 2022, 609, 709–717. [Google Scholar] [CrossRef] [PubMed]
- Abdulhameed, O.; Al-Ahmari, A.; Ameen, W.; Mian, S.H. Additive manufacturing: Challenges, trends, and applications. Adv. Mech. Eng. 2019, 11, 1687814018822880. [Google Scholar] [CrossRef]
- Kladovasilakis, N.; Sideridis, P.; Tzetzis, D.; Piliounis, K.; Kostavelis, I.; Tzovaras, D. Design and Development of a Multi-Functional Bioinspired Soft Robotic Actuator via Additive Manufacturing. Biomimetics 2022, 7, 105. [Google Scholar] [CrossRef] [PubMed]
- Cabrera, A.A.; Foeken, M.; Tekin, O.; Woestenenk, K.; Erden, M.; De Schutter, B.; Van Tooren, M.; Babuška, R.; van Houten, F.J.; Tomiyama, T. Towards automation of control software: A review of challenges in mechatronic design. Mechatronics 2010, 20, 876–886. [Google Scholar] [CrossRef]
- Mott, R.L. Machine Elements in Mechanical Design; Pearson Educación: London, UK, 2004. [Google Scholar]
- Kálmán, V. On Modeling and Control of Omnidirectional Wheels. Ph.D. Thesis, Budapest University of Technology and Economics, Budapest, Hungary, 2013. [Google Scholar]
- Creality3d. Specifications. 2023. Available online: https://www.creality3dofficial.com/es/products/creality-ender-3-pro-3d-printer (accessed on 16 August 2023).
- Mahfouz, A.A.; Aly, A.A.; Salem, F.A. Mechatronics design of a mobile robot system. Int. J. Intell. Syst. Appl. 2013, 5, 23–36. [Google Scholar] [CrossRef]
- Garcia-Sillas, D.; Gorrostieta-Hurtado, E.; Vargas, J.; Rodríguez-Reséndiz, J.; Tovar, S. Kinematics modeling and simulation of an autonomous omnidirectional mobile robot. Ing. Investig. 2015, 35, 74–79. [Google Scholar] [CrossRef]
- Brockett, R.W. Asymptotic Stability and Feedback Stabilization. Differ. Geom. Control. Theory 1982, 27, 181–191. [Google Scholar]
- de Wit, C.C.; Siciliano, B.; Bastin, G. Theory of Robot Control; Springer: London, UK, 2012. [Google Scholar]
- Jin, T.; Tack, H.H. Path following control of mobile robot using lyapunov techniques and pid cntroller. Int. J. Fuzzy Log. Intell. Syst. 2011, 11, 49–53. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot’s Velocity | Rise Time [s] | Peak Time [s] | Overshoot [%] | Settling Time 5% [s] |
|---|---|---|---|---|
| v | - | - | ||
| w |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Padilla-García, E.A.; Cruz-Morales, R.D.; González-Sierra, J.; Tinoco-Varela, D.; Lorenzo-Gerónimo, M.R. Design, Assembly and Control of a Differential/Omnidirectional Mobile Robot through Additive Manufacturing. Machines 2024, 12, 163. https://doi.org/10.3390/machines12030163
Padilla-García EA, Cruz-Morales RD, González-Sierra J, Tinoco-Varela D, Lorenzo-Gerónimo MR. Design, Assembly and Control of a Differential/Omnidirectional Mobile Robot through Additive Manufacturing. Machines. 2024; 12(3):163. https://doi.org/10.3390/machines12030163
Chicago/Turabian StylePadilla-García, Erick Axel, Raúl Dalí Cruz-Morales, Jaime González-Sierra, David Tinoco-Varela, and María R. Lorenzo-Gerónimo. 2024. "Design, Assembly and Control of a Differential/Omnidirectional Mobile Robot through Additive Manufacturing" Machines 12, no. 3: 163. https://doi.org/10.3390/machines12030163
APA StylePadilla-García, E. A., Cruz-Morales, R. D., González-Sierra, J., Tinoco-Varela, D., & Lorenzo-Gerónimo, M. R. (2024). Design, Assembly and Control of a Differential/Omnidirectional Mobile Robot through Additive Manufacturing. Machines, 12(3), 163. https://doi.org/10.3390/machines12030163