


Design and Analysis of an Input–Output Linearization-Based Trajectory Tracking Controller for Skid-Steering Mobile Robots

 ,
,  , ,
, ,  , and
, and
Abstract
:1. Introduction
- Control of vehicles with nonlinear dynamics;
- Control of skid-steering mobile robots;
- Applications of input–output linearization to nonlinear systems.
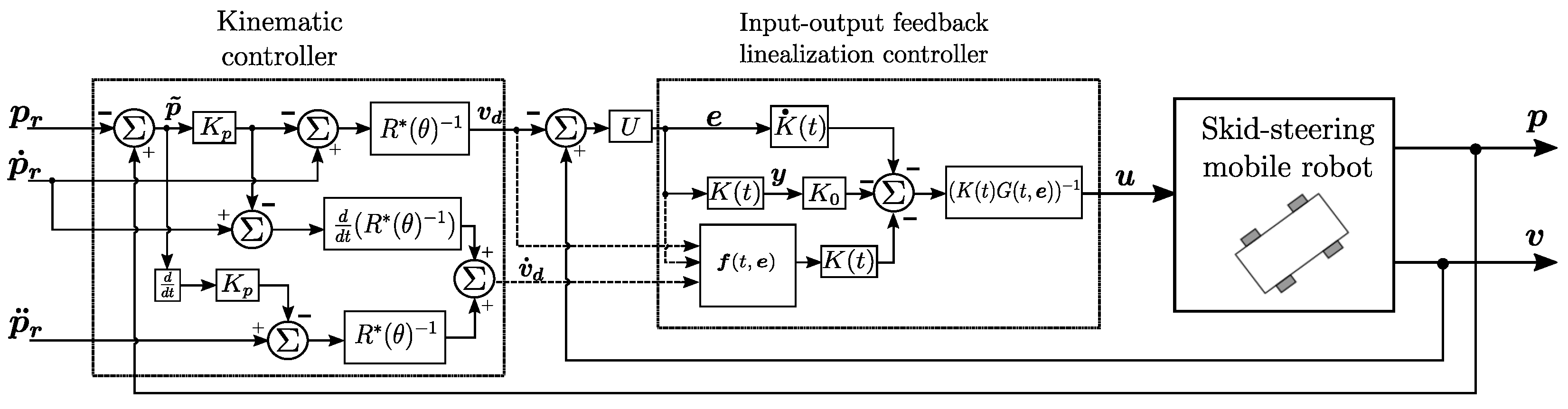
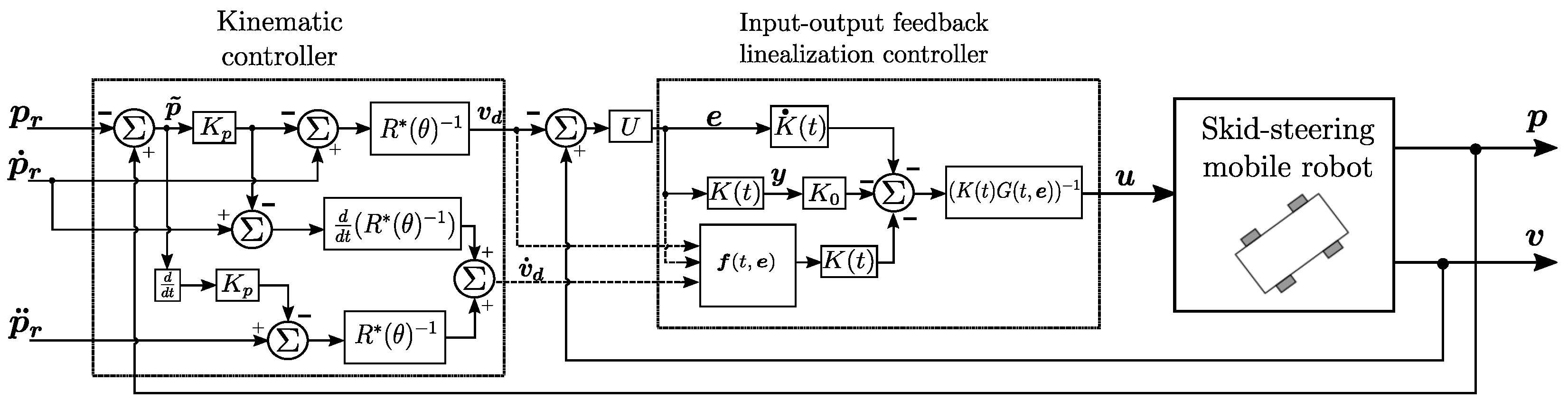
- The proposed control approach consists of a two-level approach. The external control loop (also denoted as kinematic controller) computes the desired velocity for the inner loop and is designed to ensure that the fixed (earth) frame tracking error is bounded. The purpose of the inner control loop is to guarantee that the body frame velocity error is similarly bounded.
- Due to the underactuated nature of the skid-steering mobile robot, the uniform ultimately boundedness of the position error in the earth frame is ensured theoretically without requiring stringent conditions for the desired earth frame trajectories. This statement has been proven to be true by assuming that the desired body velocity produced by the kinematic controller is persistently exciting.
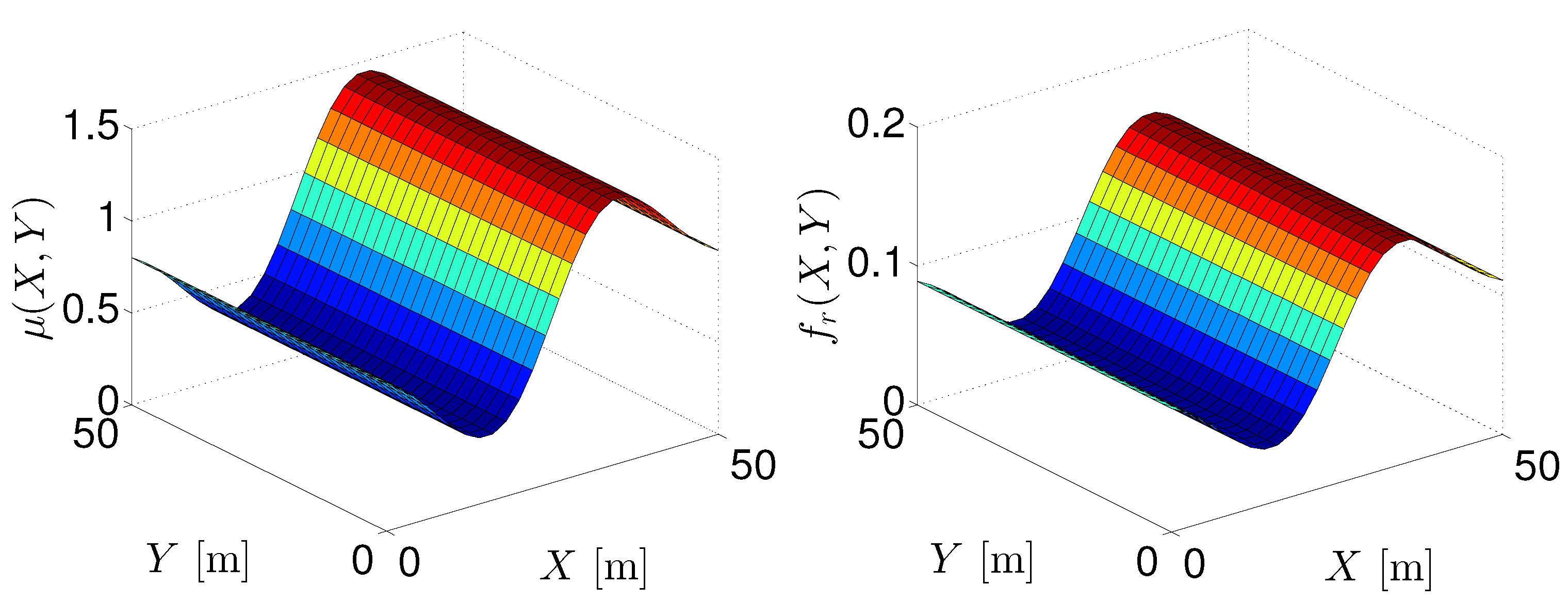
- A simulation study is presented, where the viability of the proposed approach is shown. We test the persistency of the excitation condition resulting from the proposed analysis. Furthermore, a comparison with two known trajectory tracking control schemes is shown. Robustness is tested by using friction coefficients in the vehicle that are position-varying.
2. Model, Control Goal, and Mathematical Preliminaries
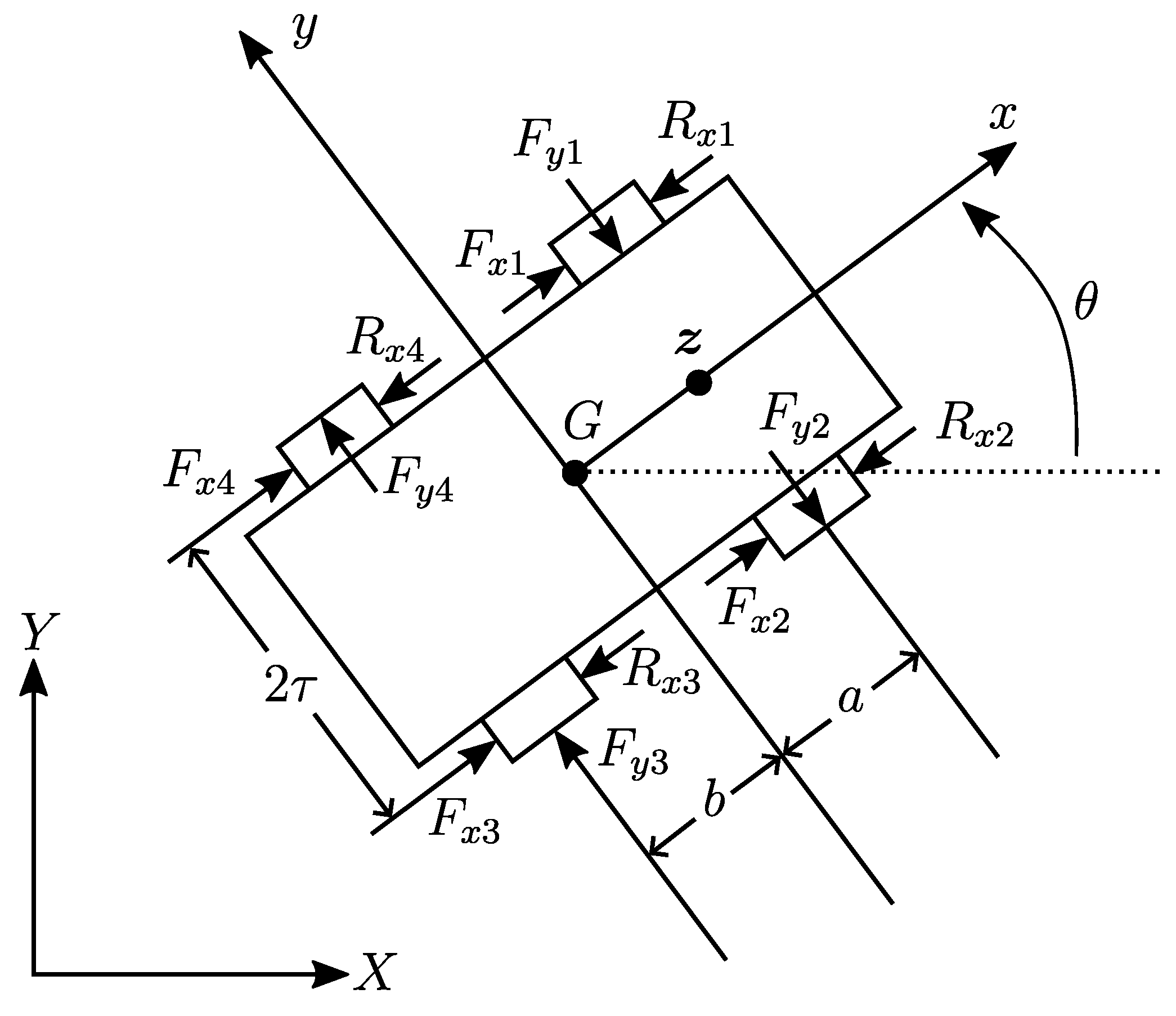
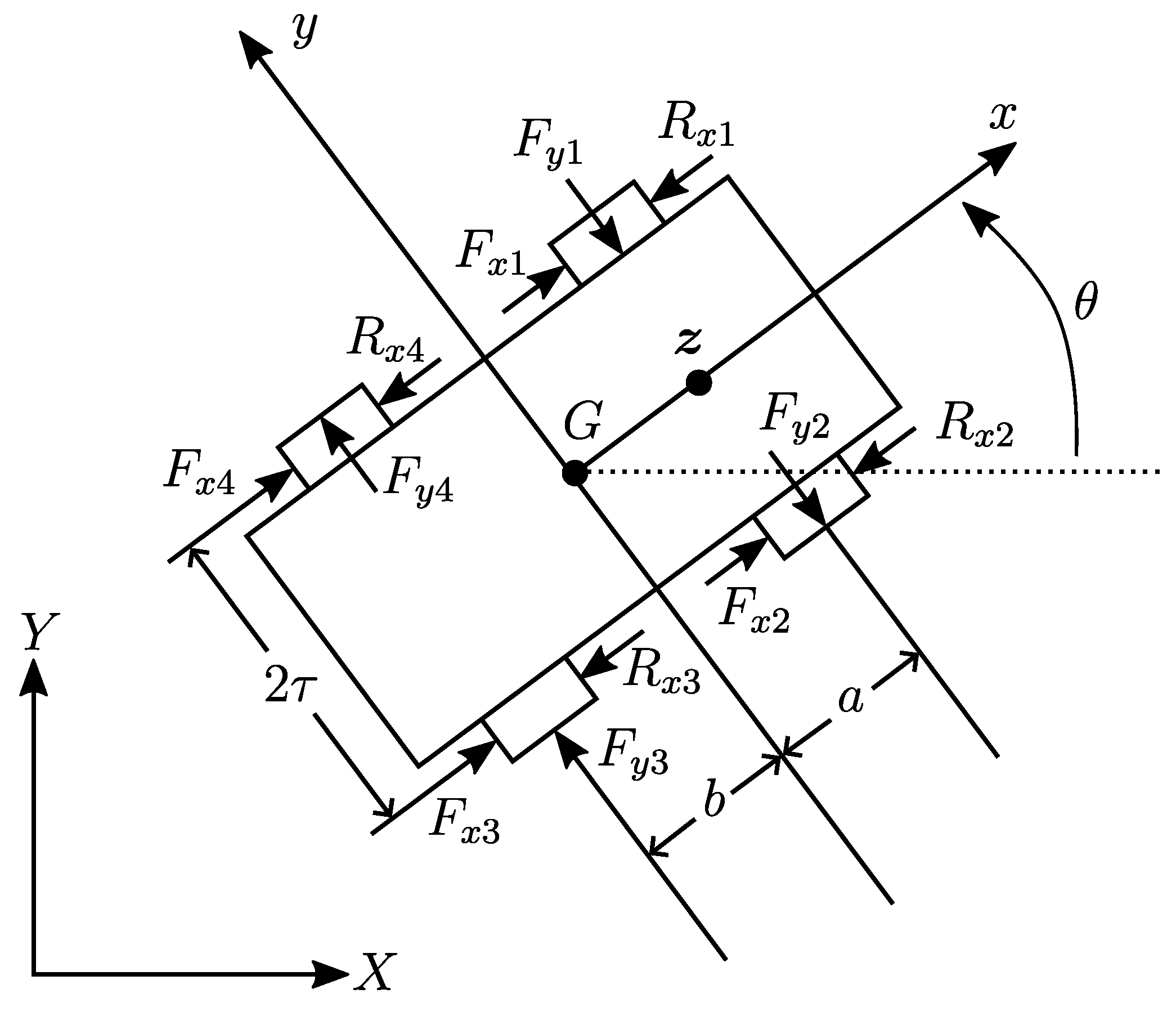
2.1. Model of a Skid-Steering Mobile Robot
2.2. Control Problem Formulation
2.3. Mathematical Background for Analysis
- (a)
- The perturbed system is small-signal -stable; that is, there exist , , such that implies thatwhere x is the solution of (12) starting at .
- (b)
- There exists , such that, for all , implies that converges to a ball of radius ; that is, for all there exists , such thatfor all , along the solutions of (12) starting at . In addition, for all , .
3. A Two-Level Control Approach
3.1. Outer Control Loop: Kinematic Control
3.2. Inner Control Loop: Input–Output Linearization
3.2.1. Error System Development
3.2.2. Input–Output Linearization Design
3.3. Bounding of the Pose Error
4. Simulation Results
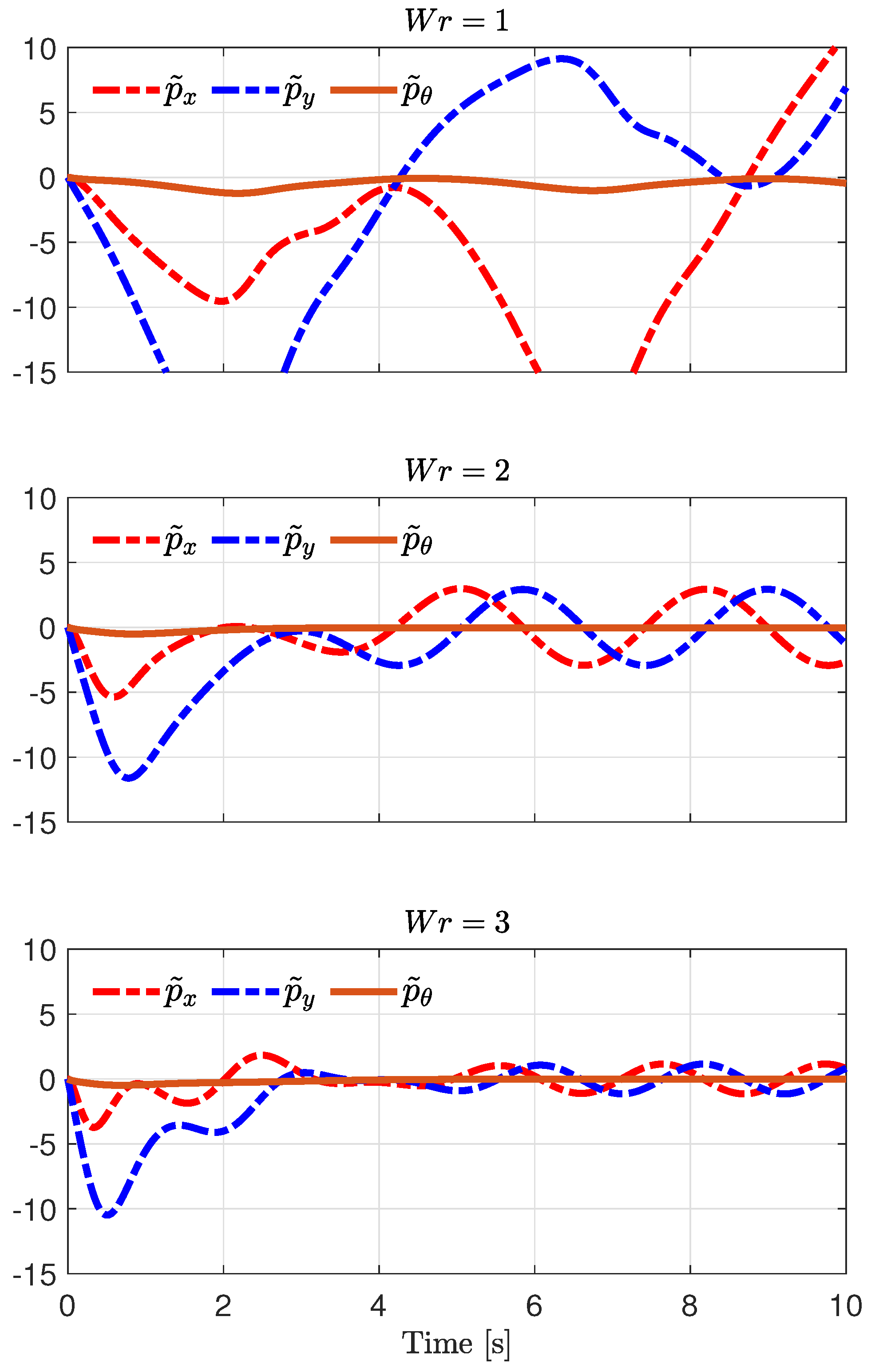
- A simulation set with the proposed input–output linearization controller using a trajectory that draws a circular path in earth coordinates at three different speeds. This test is useful to verify the conjecture that the larger the energy of the desired trajectory, the smaller the tracking error, and that is intuitively derived from Propositions 1 and 2.
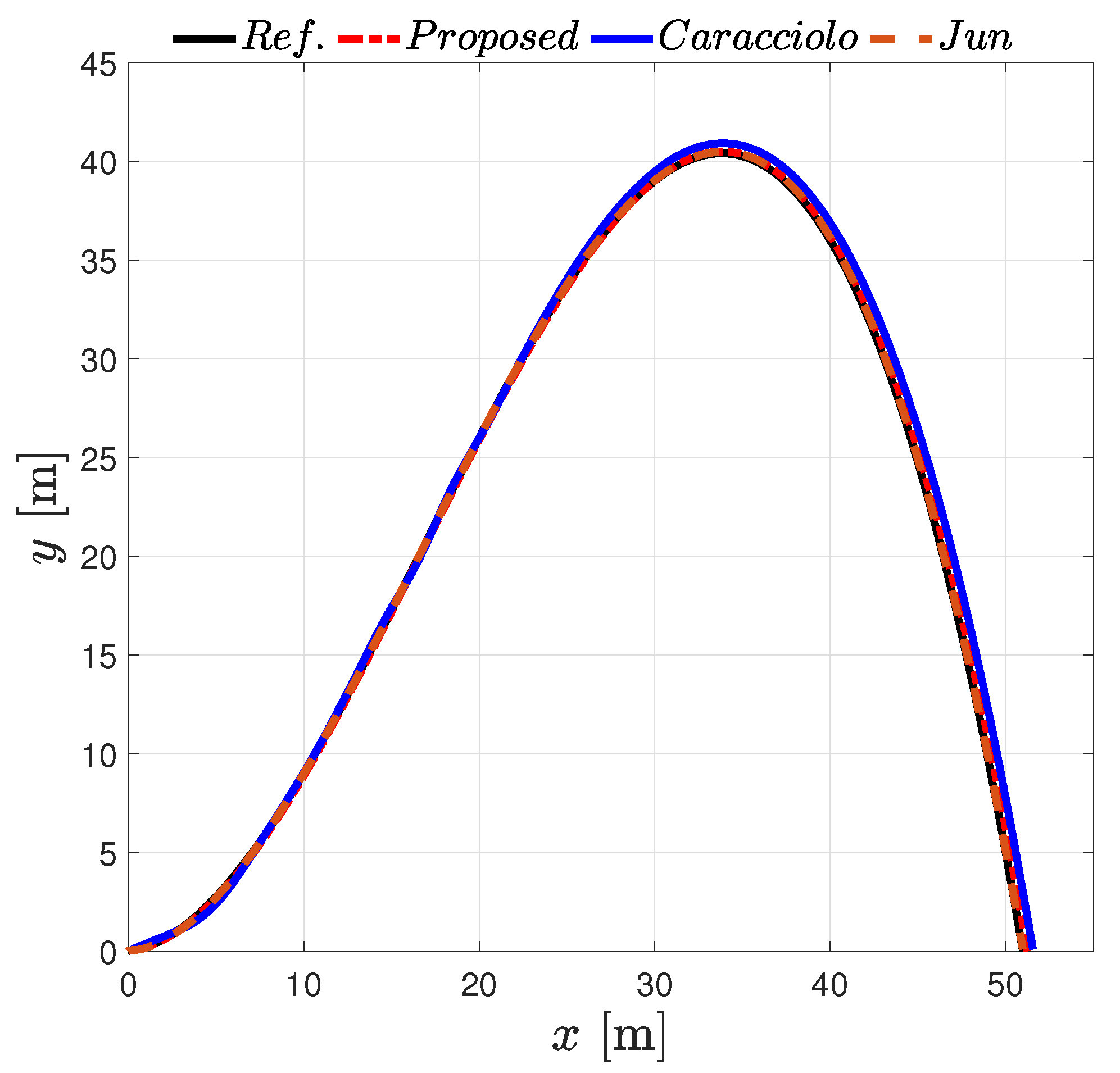
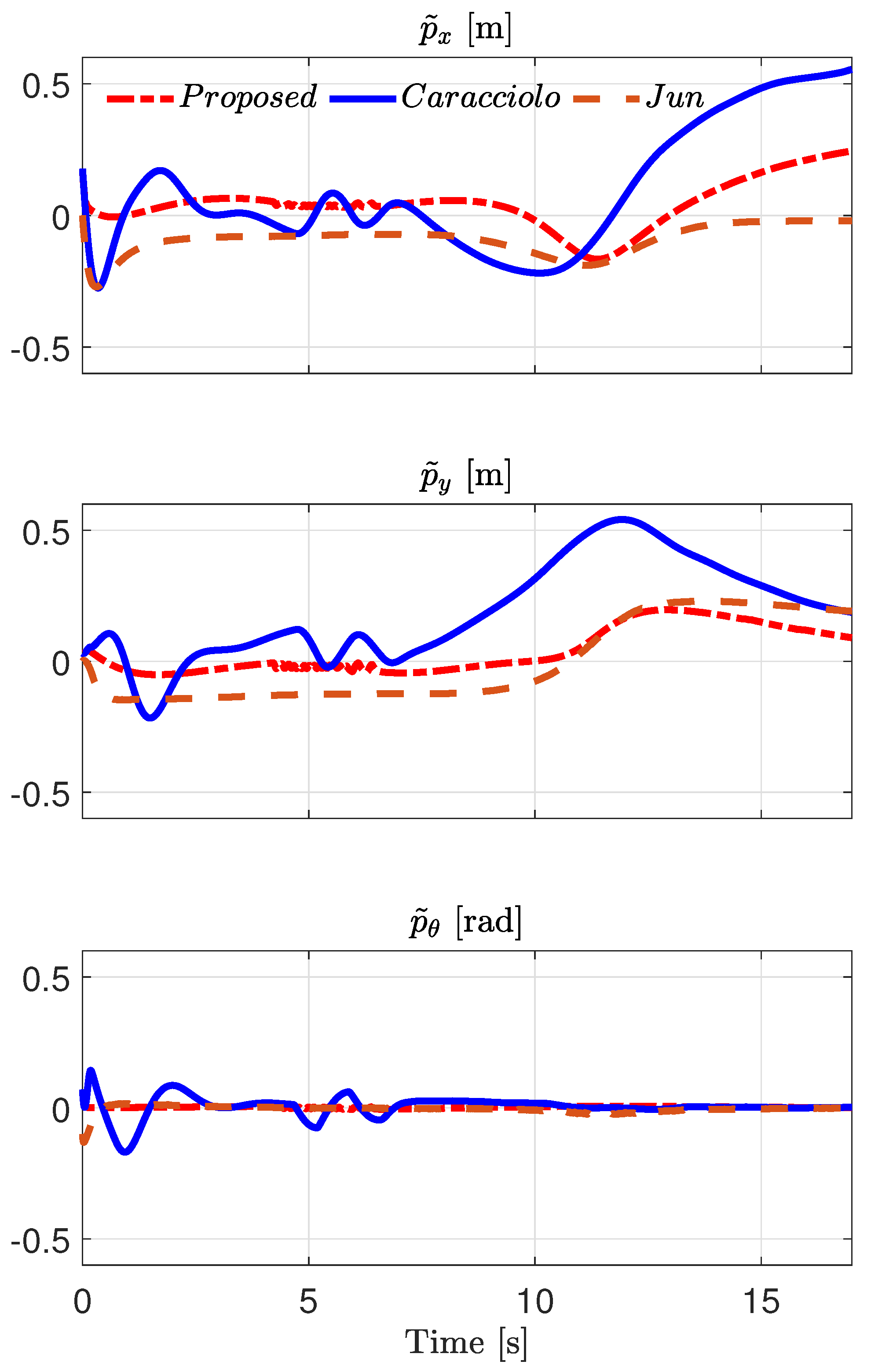
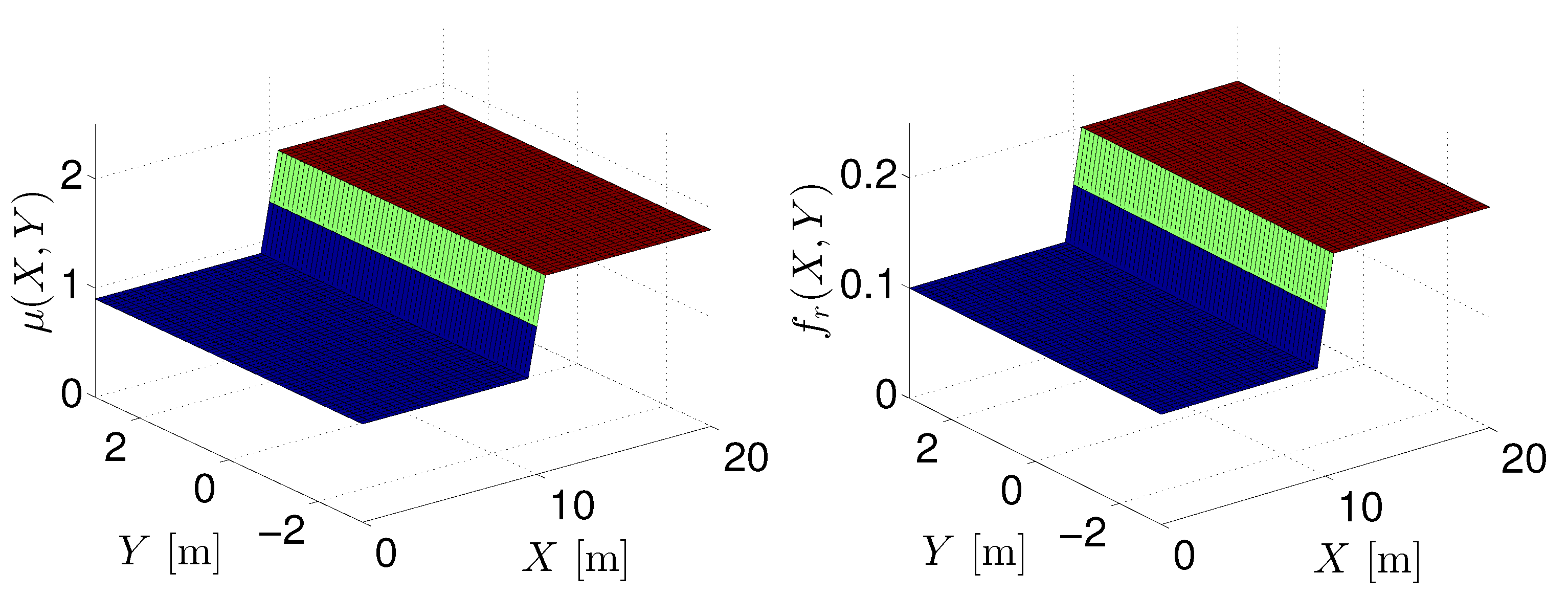
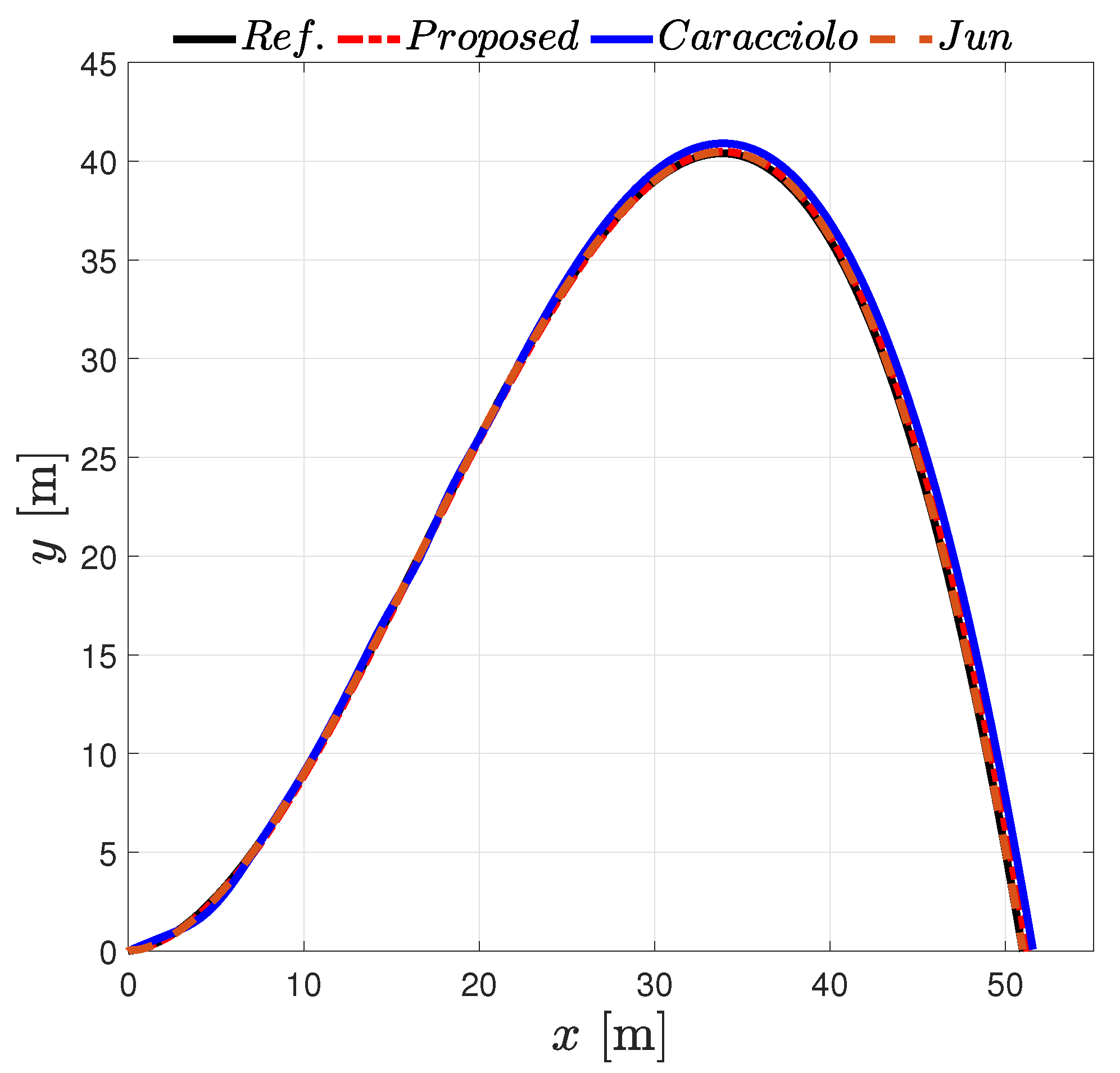
- A simulation set comparing the proposed input–output linearization controller with respect to another two known trajectory tracking control schemes. We consider a polynomial path in earth coordinates and continuous changes in the vehicle friction parameters so that continuous changes in the characteristics of the terrain are obtained.
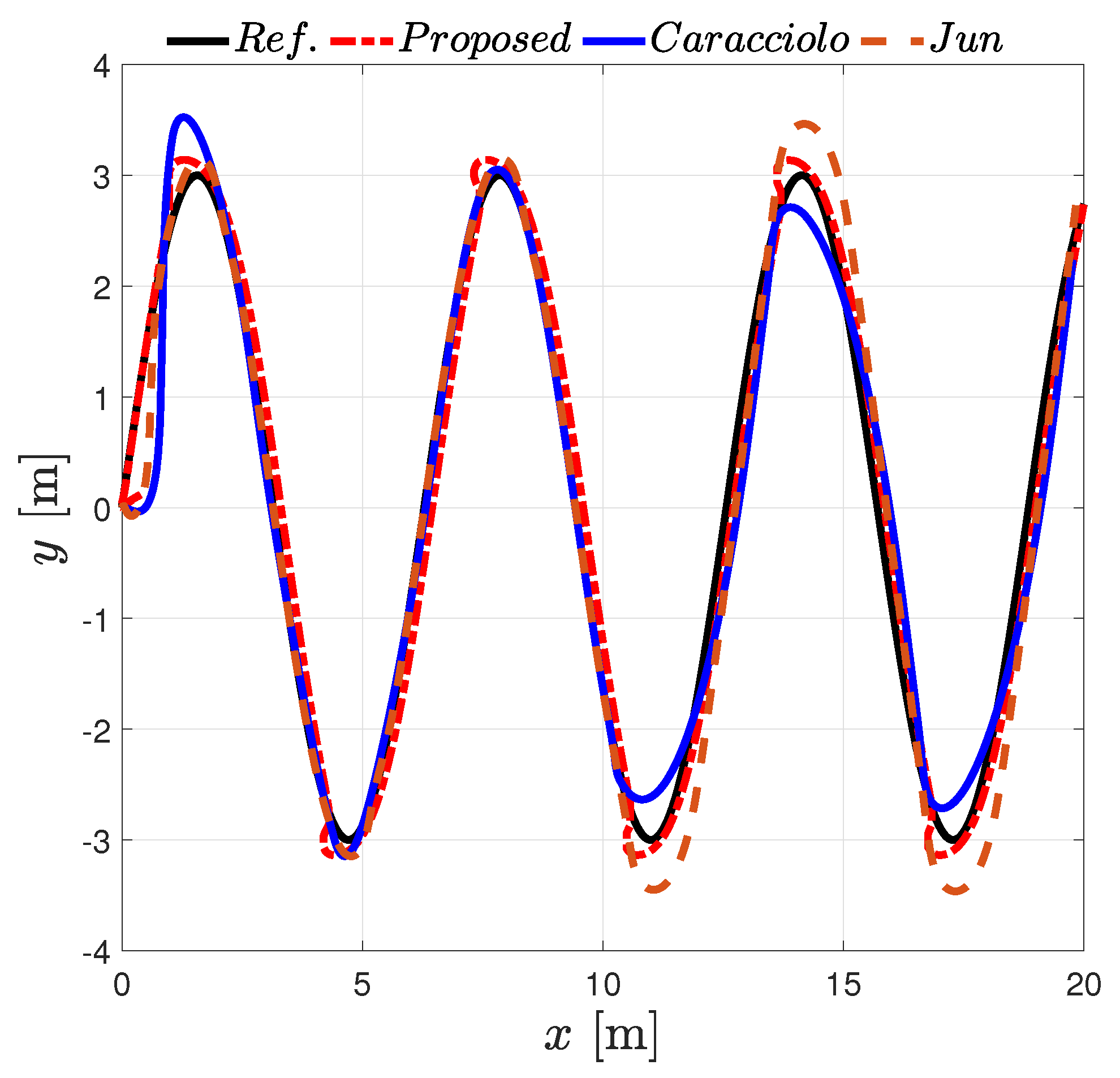
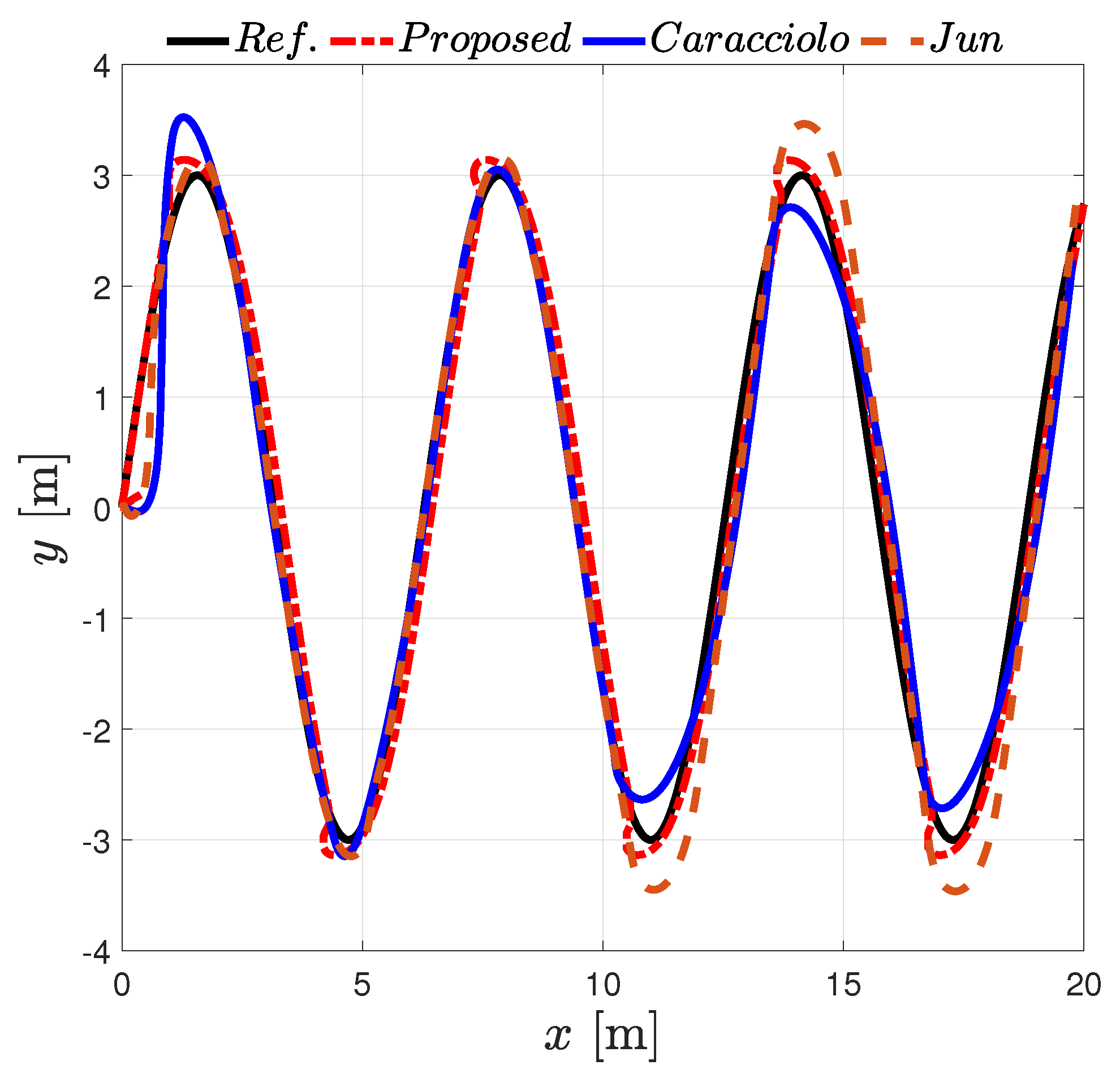
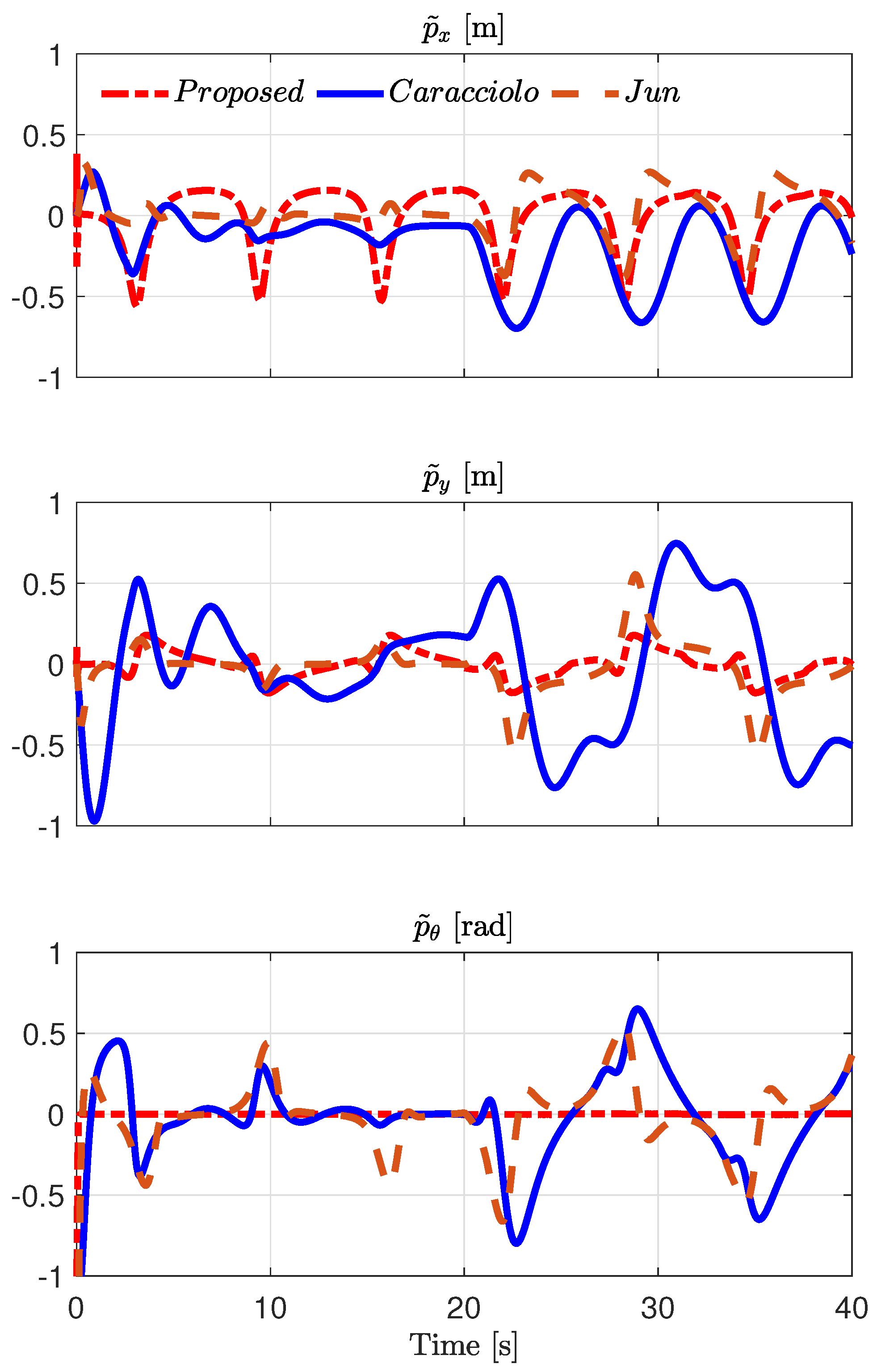
- The third simulation set is similar to the second one but a path that draws a sine wave in earth coordinates and a discontinuous change in the vehicle friction parameters are used.
4.1. Tracking a Circular Path at Different Speeds
4.2. Comparison with the Controllers [21,31]: Polynomial Path
4.3. Comparison with the Controllers [21,31]: Sine Path
5. Conclusions
- By using simulations concerning the task of drawing a circle at different speeds in coordinates, we could conclude that the proposed input–output feedback linearization controller may be well-adapted for tasks where the vehicle has to achieve a task at high speed.
- The simulation results discussed in Section 4.2 and Section 4.3 indicated that the proposed controller may provide equal or better performance than other controllers, such as the ones introduced in [21,31], in the presence either of smooth or discontinuous terrain conditions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fernandez, B.; Herrera, P.J.; Cerrada, J.A. A simplified optimal path following controller for an agricultural skid-steering robot. IEEE Access 2019, 7, 95932–95940. [Google Scholar] [CrossRef]
- Sarcinelli-Filho, M.; Carelli, R. Control of Ground and Aerial Robots; Springer Nature: Cham, Switzerland, 2023. [Google Scholar] [CrossRef]
- Zidani, G.; Drid, S.; Chrifi-Alaoui, L.; Benmakhlouf, A.; Chaouch, S. Backstepping controller for a wheeled mobile robot. In Proceedings of the 2015 4th International Conference on Systems and Control (ICSC), Sousse, Tunisia, 28–30 April 2015; pp. 443–448. [Google Scholar] [CrossRef]
- Khalaji, A.K.; Moosavian, S.A.A. Adaptive sliding mode control of a wheeled mobile robot towing a trailer. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2015, 229, 169–183. [Google Scholar] [CrossRef]
- Goswami, N.K.; Padhy, P.K. Sliding mode controller design for trajectory tracking of a non-holonomic mobile robot with disturbance. Comput. Electr. Eng. 2018, 72, 307–323. [Google Scholar] [CrossRef]
- Boubezoula, M.; Hassam, A.; Boutalbi, O. Robust-flatness controller design for a differentially driven wheeled mobile robot. Int. J. Control Autom. Syst. 2018, 16, 1895–1904. [Google Scholar] [CrossRef]
- Ibrahim, F.; Abouelsoud, A.A.; Elbab, A.M.R.F.; Ogata, T. Path following algorithm for skid-steering mobile robot based on adaptive discontinuous posture control. Adv. Robot. 2019, 33, 439–453. [Google Scholar] [CrossRef]
- Huang, Y.; Su, J. Visual Servoing of Nonholonomic Mobile Robots: A Review and a Novel Perspective. IEEE Access 2019, 7, 134968–134977. [Google Scholar] [CrossRef]
- Santiago, D.; Slawinski, E.; Mut, V. Human-inspired stable bilateral teleoperation of mobile manipulators. ISA Trans. 2019, 95, 392–404. [Google Scholar] [CrossRef]
- Slawiñski, E.; Santiago, D.; Mut, V. Dual Coordination for Bilateral Teleoperation of a Mobile Robot with Time Varying Delay. IEEE Lat. Am. Trans. 2020, 18, 1777–1784. [Google Scholar] [CrossRef]
- Scaglia, G.J.E.; Serrano, M.E.; Godoy, S.A.; Rossomando, F. Linear algebra-based controller for trajectory tracking in mobile robots with additive uncertainties estimation. IMA J. Math. Control Inf. 2019, 37, 607–624. [Google Scholar] [CrossRef]
- Herman, P. Trajectory Tracking Nonlinear Controller for Underactuated Underwater Vehicles Based on Velocity Transformation. J. Mar. Sci. Eng. 2023, 11, 509. [Google Scholar] [CrossRef]
- Herman, P. Robust trajectory tracking control scheme using transformed velocities for asymmetric underactuated marine vehicles. Ocean. Eng. 2023, 285, 115379. [Google Scholar] [CrossRef]
- Pérez-Alcocer, R.; Montoya-Villegas, L.G.; Lopez-Martinez, A.E.; Moreno-Valenzuela, J. Saturated Visual-Servoing Control Strategy for Nonholonomic Mobile Robots With Experimental Evaluations. IEEE Access 2021, 9, 130680–130689. [Google Scholar] [CrossRef]
- Rabbani, M.J.; Memon, A.Y. Trajectory Tracking and Stabilization of Nonholonomic Wheeled Mobile Robot Using Recursive Integral Backstepping Control. Electronics 2021, 10, 1992. [Google Scholar] [CrossRef]
- Labbadi, M.; Boubaker, S.; Djemai, M.; Mekni, S.K.; Bekrar, A. Fixed-Time Fractional-Order Global Sliding Mode Control for Nonholonomic Mobile Robot Systems under External Disturbances. Fractal Fract. 2022, 6, 177. [Google Scholar] [CrossRef]
- Moreno-Valenzuela, J.; Montoya-Villegas, L.; Pérez-Alcocer, R.; Sandoval, J. A family of saturated controllers for UWMRs. ISA Trans. 2020, 100, 495–509. [Google Scholar] [CrossRef]
- Fu, D.; Huang, J.; Shangguan, W.B.; Yin, H. Constraint-following servo control for an underactuated mobile robot under hard constraints. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2022, 236, 26–38. [Google Scholar] [CrossRef]
- Shen, C.; Bai, J.; Shi, B.; Chen, Y. Trajectory tracking control for wheeled mobile robot subject to generalized torque constraints. Trans. Inst. Meas. Control 2023, 45, 1258–1270. [Google Scholar] [CrossRef]
- Ramírez-Neria, M.; González-Sierra, J.; Madonski, R.; Ramírez-Juárez, R.; Hernandez-Martinez, E.G.; Fernández-Anaya, G. Leader–Follower Formation and Disturbance Rejection Control for Omnidirectional Mobile Robots. Robotics 2023, 12, 122. [Google Scholar] [CrossRef]
- Caracciolo, L.; de Luca, A.; Iannitti, S. Trajectory tracking control of a four-wheel differentially driven mobile robot. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No.99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 4, pp. 2632–2638. [Google Scholar] [CrossRef]
- Sǒle, F.; Žalud, L.; Honzik, B. Mathematical Model of a SKID-Steered Mobile Robot for Control and Self-Localisation. In Proceedings of the 4th IFAC Symposium on Intelligent Autonomous Vehicles (IAV 2001), Sapporo, Japan, 5–7 September 2001; Volume 34, pp. 273–278. [Google Scholar] [CrossRef]
- Kozłowski, K.; Pazderski, D. Modeling and control of a 4-wheel skid-steering mobile robot. Int. J. Appl. Math. Comput. Sci. 2004, 14, 477–496. [Google Scholar]
- Martínez, J.L.; Mandow, A.; Morales, J.; Pedraza, S.; García-Cerezo, A. Approximating Kinematics for Tracked Mobile Robots. Int. J. Robot. Res. 2005, 24, 867–878. [Google Scholar] [CrossRef]
- Kozlowski, K.; Pazderski, D. Practical Stabilization of a Skid-steering Mobile Robot—A Kinematic-based Approach. In Proceedings of the 2006 IEEE International Conference on Mechatronics, Budapest, Hungary, 3–5 July 2006; pp. 519–524. [Google Scholar] [CrossRef]
- Lucet, E.; Grand, C.; Sallé, D.; Bidaud, P. Dynamic yaw and velocity control of the 6WD skid-steering mobile robot RobuROC6 using sliding mode technique. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 4220–4225. [Google Scholar] [CrossRef]
- Barbosa de Oliveira Vaz, D.A.; Inoue, R.S.; Grassi, V. Kinodynamic Motion Planning of a Skid-Steering Mobile Robot Using RRTs. In Proceedings of the 2010 Latin American Robotics Symposium and Intelligent Robotics Meeting, Sao Bernardo do Campo, Brazil, 23–28 October 2010; pp. 73–78. [Google Scholar] [CrossRef]
- Ailon, A.; Cosic, A.; Zohar, I.; Rodic, A. Control for teams of kinematic unicycle-like and skid-steering mobile robots with restricted inputs: Analysis and applications. In Proceedings of the 2011 15th International Conference on Advanced Robotics (ICAR), Tallinn, Estonia, 20–23 June 2011; pp. 371–376. [Google Scholar] [CrossRef]
- Okada, T.; Mahmoud, A.; Botelho, W.T.; Shimizu, T. Trajectory estimation of a skid-steering mobile robot propelled by independently driven wheels. Robotica 2012, 30, 123–132. [Google Scholar] [CrossRef]
- Lyou, J. Indoor Navigation of a Skid Steering Mobile Robot Via Friction Compensation and Map Matching. J. Inst. Control Robot. Syst. 2013, 19, 468–472. [Google Scholar]
- Jun, J.Y.; Hua, M.D.; Benamar, F. A trajectory tracking control design for a skid-steering mobile robot by adapting its desired instantaneous center of rotation. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 4554–4559. [Google Scholar] [CrossRef]
- Elshazly, O.; Zyada, Z.; Mohamed, A. Genetic-based control of a skid steering mobile robot. Int. J. Mech. Robot. Syst. 2016, 3, 250–269. [Google Scholar] [CrossRef]
- Ling, Y.; Wu, J.; Lyu, Z.; Xiong, P. Backstepping controller for laser ray tracking of a target mobile robot. Meas. Control 2020, 53, 1540–1547. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, X.; Tao, B.; Ding, H. Point Stabilization of Nonholonomic Mobile Robot by Bézier Smooth Subline Constraint Nonlinear Model Predictive Control. IEEE/ASME Trans. Mechatron. 2021, 26, 990–1001. [Google Scholar] [CrossRef]
- Chen, Y.; Li, N.; Zeng, W.; Zhang, S.; Ma, G. Curved Path Following Controller for 4W Skid-Steering Mobile Robots Using Backstepping. IEEE Access 2022, 10, 66072–66082. [Google Scholar] [CrossRef]
- Zhang, J.; Li, S.; Meng, H.; Li, Z.; Sun, Z. Variable gain based composite trajectory tracking control for 4-wheel skid-steering mobile robots with unknown disturbances. Control Eng. Pract. 2023, 132, 105428. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Kim, D.H.; Oh, J.H. Tracking control of a two-wheeled mobile robot using input-output linearization. Control Eng. Pract. 1999, 7, 369–373. [Google Scholar] [CrossRef]
- Bolzern, P.; DeSantis, R.M.; Locatelli, A. An Input-Output Linearization Approach to the Control of an n-Body Articulated Vehicle. J. Dyn. Syst. Meas. Control 2001, 123, 309–316. [Google Scholar] [CrossRef]
- Horn, J. Trajectory tracking of a batch polymerization reactor based on input-output-linearization of a neural process model. Comput. Chem. Eng. 2001, 25, 1561–1567. [Google Scholar] [CrossRef]
- Castilla, M.; Garcia de Vicuna, L.; Guerrero, J.M.; Matas, J.; Miret, J. Sliding-mode control of quantum series-parallel resonant converters via input-output linearization. IEEE Trans. Ind. Electron. 2005, 52, 566–575. [Google Scholar] [CrossRef]
- Chang, P.H.; Han, D.K.; Shin, Y.H.; Kim, K.J. Effective suppression of pneumatic vibration isolators by using input-output linearization and time delay control. J. Sound Vib. 2010, 329, 1636–1652. [Google Scholar] [CrossRef]
- Salimi, M.; Zakipour, A. Direct voltage regulation of DC–DC buck converter in a wide range of operation using adaptive input-output linearization. IEEJ Trans. Electr. Electron. Eng. 2015, 10, 85–91. [Google Scholar] [CrossRef]
- Aguilar-Ibañez, C. Stabilization of the PVTOL aircraft based on a sliding mode and a saturation function. Int. J. Robust Nonlinear Control 2017, 27, 843–859. [Google Scholar] [CrossRef]
- Aguilar-Ibañez, C.; Suarez-Castanon, M.S.; Mendoza-Mendoza, J.; de Jesus Rubio, J.; Martínez-García, J.C. Output-feedback stabilization of the PVTOL aircraft system based on an exact differentiator. J. Intell. Robot. Syst. 2018, 90, 443–454. [Google Scholar] [CrossRef]
- García-Molleda, D.; Sandoval, J.; Coria, L.N.; Bugarin, E. Energy-based trajectory tracking control for underwater vehicles subject to disturbances with actuator partial faults and bounded input. Ocean. Eng. 2022, 248, 110666. [Google Scholar] [CrossRef]
- Sandoval, J.; Kelly, R.; Santibáñez, V.; Villalobos-Chin, J. Energy regulation of torque–driven robot manipulators in joint space. J. Frankl. Inst. 2022, 359, 1427–1456. [Google Scholar] [CrossRef]
- Nath, A.; Dey, R.; Aguilar-Avelar, C. Observer based nonlinear control design for glucose regulation in type 1 diabetic patients: An LMI approach. Biomed. Signal Process. Control 2019, 47, 7–15. [Google Scholar] [CrossRef]
- Montoya-Cháirez, J.; Moreno-Valenzuela, J. An Input-Output Feedback Linearization Approach to the Motion Control of Flexible Joint Manipulators. In Proceedings of the 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 14–17 December 2021; pp. 1426–1431. [Google Scholar] [CrossRef]
- Gandarilla, I.; Montoya-Cháirez, J.; Santibáñez, V.; Aguilar-Avelar, C.; Moreno-Valenzuela, J. Trajectory tracking control of a self-balancing robot via adaptive neural networks. Eng. Sci. Technol. Int. J. 2022, 35, 101259. [Google Scholar] [CrossRef]
- Sastry, S.; Bodson, M. Adaptive Control: Stability, Convergence, and Robustness; Prentice-Hall, Inc.: Hoboken, NJ, USA, 1989. [Google Scholar]
- Whitney, D.E. Resolved Motion Rate Control of Manipulators and Human Prostheses. IEEE Trans.-Man-Mach. Syst. 1969, 10, 47–53. [Google Scholar] [CrossRef]
- Kelly, R.; Moreno, J. Manipulator motion control in operational space using joint velocity inner loops. Automatica 2005, 41, 1423–1432. [Google Scholar] [CrossRef]
- Moreno-Valenzuela, J.; Aguilar-Avelar, C.; Puga-Guzman, S.A.; Santbáñez, V. Adaptive Neural Network Control for the Trajectory Tracking of the Furuta Pendulum. IEEE Trans. Cybern. 2016, 46, 3439–3452. [Google Scholar] [CrossRef] [PubMed]
- Jankovic, M.; Sepulchre, R.; Kokotovic, P. Constructive Lyapunov stabilization of nonlinear cascade systems. IEEE Trans. Autom. Control 1996, 41, 1723–1735. [Google Scholar] [CrossRef]
- Spong, M.W.; Corke, P.; Lozano, R. Nonlinear Control of the Reaction Wheel Pendulum. Automatica 2001, 37, 1845–1851. [Google Scholar] [CrossRef]
- Pathak, K.; Franch, J.; Agrawal, S. Velocity and position control of a wheeled inverted pendulum by partial feedback linearization. IEEE Trans. Robot. 2005, 21, 505–513. [Google Scholar] [CrossRef]
- Canudas de Wit, C.; Khennouf, H.; Samson, C.; Sordalen, O.J. Nonlinear Control Design for Mobile Robots. In Recent Trends in Mobile Robots; Zheng, Y.F., Ed.; World Scientific Series in Robotics and Intelligent Systems; World Scientific: Singapore, 1994; Volume 11, Chapter 5; pp. 121–156. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| % | % | ||||
|---|---|---|---|---|---|
| 8.8907 | 2.1699 | 75.59 | 1.0887 | 87.75 | |
| 9.7074 | 3.9841 | 58.95 | 2.9552 | 69.55 | |
| 0.6042 | 0.1787 | 70.42 | 0.1858 | 69.24 |
| Caracciolo et al. | Jun et al. | Proposed | |||
|---|---|---|---|---|---|
| Notation | Value | Notation | Value | Notation | Value |
| diag{300, 195} | , | 3, 15.8 | diag{40, 40} | ||
| diag{100, 65} | , | 7.95, 1 | diag{40, 40, 40} | ||
| diag{20, 13} | , | 0.0005, 5 | , , | 2, 0 | |
| 4.05 | , | 100, −10 | |||
| Caracciolo et al. [21] | Jun et al. [31] | P% | Proposed | P% | |
|---|---|---|---|---|---|
| 0.2504 | 0.1064 | 57.50% | 0.0987 | 60.57% | |
| 0.2656 | 0.1540 | 42.03% | 0.0941 | 64.55% | |
| 0.0401 | 0.0148 | 63.20% | 0.0044 | 89.13% |
| Caracciolo et al. | Jun et al. | Proposed | |||
|---|---|---|---|---|---|
| Notation | Value | Notation | Value | Notation | Value |
| diag{250, 250} | , | 3, 15.8 | diag{250, 250} | ||
| diag{50, 50} | , | 7.95, 1 | diag{100, 150, 50} | ||
| diag{100, 100} | , | 0.0005, 5 | , , | 3.6, 0 | |
| 4.05 | , | 110, 10 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moreno, J.; Slawiñski, E.; Chicaiza, F.A.; Rossomando, F.G.; Mut, V.; Morán, M.A. Design and Analysis of an Input–Output Linearization-Based Trajectory Tracking Controller for Skid-Steering Mobile Robots. Machines 2023, 11, 988. https://doi.org/10.3390/machines11110988
Moreno J, Slawiñski E, Chicaiza FA, Rossomando FG, Mut V, Morán MA. Design and Analysis of an Input–Output Linearization-Based Trajectory Tracking Controller for Skid-Steering Mobile Robots. Machines. 2023; 11(11):988. https://doi.org/10.3390/machines11110988
Chicago/Turabian StyleMoreno, Javier, Emanuel Slawiñski, Fernando A. Chicaiza, Francisco G. Rossomando, Vicente Mut, and Marco A. Morán. 2023. "Design and Analysis of an Input–Output Linearization-Based Trajectory Tracking Controller for Skid-Steering Mobile Robots" Machines 11, no. 11: 988. https://doi.org/10.3390/machines11110988
APA StyleMoreno, J., Slawiñski, E., Chicaiza, F. A., Rossomando, F. G., Mut, V., & Morán, M. A. (2023). Design and Analysis of an Input–Output Linearization-Based Trajectory Tracking Controller for Skid-Steering Mobile Robots. Machines, 11(11), 988. https://doi.org/10.3390/machines11110988