Abstract
This review comprehensively covers the development of viable unmanned underwater vehicles based on their technical capabilities, in particular those designed to conduct research exploration in underwater ecosystems and address environmental issues through analysis of coral reef vulnerability. The most important elements to be obtained are in situ data samples for analysis and characterization, supported by molecular biomarkers and marine ecology indicators. The following aspects are considered in this study: first, the geographic distribution of coral reefs for the study of marine ecology and molecular biological approaches for the detection of biomarkers to evaluate the vulnerability of coral reefs are detailed; then, the technologies currently available for the study of coral reefs are briefly described, ranging from large-scale capture to local-scale capture directly in the study region, taking advantage of remote sensing systems assisted by aerial technologies, marine vehicles, and artificial intelligence for the mapping, monitoring, and management of coral reefs as well as the characterization of their vulnerability; following this, existing marine vehicle technologies are generally explained, including a categorical description and an updated and highlighted list of innovative and robust marine vehicles that have been used in coral reef applications; the technical capabilities of such vehicle throughout the missions they have been subjected to are presented based on bibliographic references; finally, this review promotes multidisciplinary work to integrate the developments in the associated knowledge areas in order to obtain synergies in the face of challenges related to the massive scale of coral reef degradation worldwide.
1. Introduction
Coral reefs are some of the most diverse, productive, and complex marine ecosystems [1]. They are distributed between 30 degrees north and 30 degrees south in latitude from the equator and occupy almost 3% of the continental shelf area, as shown in Figure 1 [2]. Coral reefs have flourished thanks to the symbiotic relationships between simple tiny organisms called coral polyps and microalgae called zooxanthellae, which belong to the Symbiodinium genera, that live inside the polyp bodies. These symbiotic assemblages, called holobionts, live in colonies and build up a communal stony skeleton formed of calcium carbonate. Due to their physiological capacities, corals grow and survive in waters with high light penetration that are shallow, warm, and nutrient-poor (oligotrophic), in which this symbiotic interaction is key. The polyps provide nutrients to the zooxanthellae through their excreted waste, while the algae provide nutrients to the polyps through the photosynthetic process [3]. These corals, known as hermatypic reef-building corals, develop tridimensional life oases for many other marine species [2], supporting an estimated 25% of marine species in tropical regions [4]. The development of coral reef structures depends on the availability of hard bottoms (e.g., calcareous reefs or igneous rocks), light levels, and wave action. The development of the reef begins with the setting of coral larvae on hard bottoms, followed by coral colonies growing at a slow rate (of only a few millimeters per year), considering that the construction of a reef could take hundreds or thousands of years [2]. Several types of coral reef structures depend on habitat availability and environmental conditions, including patch reefs, in which the reef grows in shallow areas and is surrounded by sand; fringing reefs, which grow in different dimensions on islands and shelving rocky coastlines; and barrier reefs, which are more developed reef structures located on many tropical islands that are usually separated from the land by a lagoon with patch and fringing reefs [3].

Figure 1.
Global distribution of coral reefs (navy blue gradient: reef satellite imagery; green: coral reef bleaching) [5].
Coral reefs supply valuable goods and services to the human coastal communities that live near them. Reefs protect coastal areas from storms and coastal erosion, maintain and create beaches, and are important sources of food and recreation, generating employment opportunities and bringing millions of dollars to local economies [6]. Coral reefs are highly susceptible to environmental perturbations, becoming the most degraded and threatened global ecosystem due to anthropogenic pressures and extreme climate changes. Global warming has increased over the past few decades, causing more frequent coral bleaching and massive coral mortality. In addition, other threats such as over-fishing, destructive fishing, terrestrial runoff, coastal development, recreational activities, water pollution, and oceanic acidification have led to the massive decline of coral ecosystems [2,7,8]. Due to the increasing magnitude of threats and the negative impacts faced by coral ecosystems, it is necessary to determine the distribution and status of reef habitats, species biological diversity, and species populations, which are crucial data for assessing the impact of disturbances to reefs. In addition, the long-term monitoring of coral reefs can provide critical data for the assessment of the health of reefs and the economic, social, and environmental consequences of reef decline, helping authorities to design management plans and policies for the conservation, recovery, and sustainable use of these marine ecosystems [4,9,10].
High-quality benthic/habitat maps are essential, both at a regional scale, where they indicate the occurrence of assemblages along the mainland coast, and at a more local scale, where they detail the spatial distribution and status of coral vitality, e.g., pristine vs. damaged [11]. Among the methodologies employed, direct surveys and remote sensing technology have been commonly used [10]. For direct benthic surveys, SCUBA divers use quadrant, point intercept transect, and video methods to obtain benthic data [12]. However, direct survey methods have several disadvantages that limit their use and the scope of their results. Detailed and continuous monitoring of coral reefs through direct surveys is expensive, which is especially problematic for important coral reef formations in countries with limited resources. Furthermore, direct monitoring has a restricted geographic and bathymetric scale, mainly caused by the highly heterogeneous environments where coral reefs are placed; hence, monitoring programs provide information dispersed in time and space, with some areas and depths being sampled more intensively than others [9]. However, direct survey monitoring programs focus on the state of biological components at the expense of their relationships with environmental stressors, making it difficult to observe which factors promote the recovery or decline of coral reefs, limiting the scientific information that can be used in decision-making and mitigation actions [9]. Monitoring coral reefs is frequently based on assessing the live coral cover percentage as a health measurement. However, this simplistic viewpoint is not sufficient to fully understand the health of the coral reef ecosystem. Other indicators include the composition and properties of the coral community, recovery potential, and functional, trophic, biogeochemical, and physical processes, which concurrently interact to support coral reef ecosystems [4]. Monitoring other biological groups, such as the algal community, fish abundance, biomass, and trophic functionality, is just as important as monitoring coral species [4]. On the one hand, macroalgae are strong competitors for hard substrates with coral species; on the other hand, crustose coralline algae are key contributors to reef-building [13]. Therefore, knowledge of the coverage of both types of algae is directly related to coral reef health. The diversity and abundance of fish promote a range of functional roles inside coral reef ecosystems. An ecologically key role is provided by herbivorous coral reef fish, which control the abundance of macroalgae; understanding the distribution patterns and abundance of such functional groups has practical implications for the management and conservation of coral reefs [14,15]. The variation in methods and approaches for monitoring algae and fish makes aggregating data more difficult than simply assessing the coral cover; hence, versatile and cost-effective technologies that allow for the continuous and long-term monitoring of different biological components are needed.
A good approximation for the estimation of biological diversity can be achieved through implementing barcode molecular tools, which are useful for species identification. With the arrival of the omic age of molecular techniques, environmental deoxyribonucleic acid (eDNA) techniques have gained momentum in monitoring and estimating the biological diversity of strategic ecosystems such as coral reefs in a more efficient manner than previous techniques. eDNA refers to DNA (deoxyribonucleic acid) collected from soil, water, or air samples without first isolating from a target organism [16]. eDNA samples are characterized by a complex mixture of DNA from cells or tissue of different organisms representing sampled the biological community, allowing for effective estimation and monitoring of the biological diversity in any location or ecosystem. Two approaches can be implemented with eDNA: (1) a species-specific approach, which aims to detect a single species in the environment, and (2) an eDNA multi-specific approach, or metabarcoding, which aims to identify several taxa simultaneously from an environmental sample without previous knowledge of the species present in the sample [16,17]. eDNA is a useful technique for sampling the diversity of coral reef ecosystems, where the presence of cryptic species has previously been underestimated due to their biological (e.g., small size) and ecological (e.g., cryptic behavior, small home range, and high habitat specialization) characteristics, covering between 40% and 50% of the total species present in the reef ecosystem [18].
In order to evaluate the impacts of environmental stressors on coral reefs, several molecular biomarkers for monitoring degradation have been proposed and studied, including reactive oxygen species, nitric oxide, and heat shock proteins (see Table 1).
Thermal stress caused by increases in seawater temperature is the principal trigger of massive coral bleaching, referring to the whitening of corals due to breakdown of the coral–microalga symbiosis. In addition, light stress induced by visible and ultraviolet (UV) solar radiation can also trigger loss of symbiosis, exacerbating thermally induced bleaching. It has been proposed that the main mechanism by which these stressors provoke coral bleaching is through the production and accumulation of reactive oxygen species (ROS) and reactive nitrogen species (RNS) in holobionts [19,20,21]. However, some authors have suggested that ROS may not be responsible for this phenomenon [19,22].
ROS are a family of highly reactive molecules that contain oxygen in their structure, including the superoxide anion (), the hydroxyl radical (HO•), and hydrogen peroxide (H2O2). Supraphysiological concentrations of these oxidants cause damage to cellular biomolecules, such as lipid peroxidation, protein degradation, and DNA strand breaks and mutations, as well as induction of cellular death (e.g., apoptosis). This harmful oxidative stress can be counteracted by antioxidant mechanisms [23,24,25] such as the enzyme superoxide dismutase (SOD) expressed in corals and zooxanthellae as well as by non-enzymatic antioxidants such as green fluorescent protein (GFP), dimethylsulfide (DMS), dimethylsulfoniopropionate (DMSP), and UV-absorbing compounds (e.g., mycosporine glycine) in corals [20]. Szabó et al. [26] proposed that in Symbiodinium, elevated temperatures and high light stresses may provoke an increase in ROS production, principally , H2O2, and singlet oxygen (1O2). These could in turn induce coral bleaching, mainly through exocytosis (expulsion) of the zooxanthellae. Other mechanisms may also contribute to bleaching, such as damage to photosynthetic pigments, host cell detachment, and apoptosis. Moreover, ROS can also be produced in the endoplasmic reticulum and mitochondria of the coral host itself [19].
However, nitric oxide (NO) has been suggested as a mediator of coral bleaching via thermal stress. This gas functions as a signaling molecule, and can react with to produce the highly destructive radical peroxynitrite (ONOO−) [19]. Production of NO can be carried out in zooxanthellae and corals by the enzyme nitric oxide synthase (NOS) [27,28,29]. Notably, variations in NO production and effects, such as photoinhibition and cell mortality, have been observed among different symbiont types in response to heat stress [30]. Jury et al. [31] suggested that NO produced by symbionts may be an important factor in the onset of bleaching due to temperature stress in the coral Pocillopora acuta, rather than ROS and cell death; however, the mechanism by which this would induce coral bleaching has not been completely elucidated.
Heat shock proteins (Hsps) have been proposed as a possible cellular protective mechanism against coral bleaching and mortality induced by increased temperatures [32]. Hsps are molecular chaperones responsible for the correct folding of nascent proteins, reversing misfolding, preventing (and sometimes reversing) protein aggregation, and translocation of proteins to cellular compartments or to the degradation machinery. Hsps are expressed under normal cellular conditions and are upregulated under stress to maintain proteostasis, not only during heat stress but also in response to other stressors such as UV radiation, oxidative stress, hypoxia, heavy metals, and infections, among others. These proteins are classified as either high molecular weight Hsps (such as Hsp110, Hsp90, Hsp70, and Hsp60) or small Hsps (such as Hsp40, Hsp21, and Hsp10) [33,34,35].
Hsps have been identified in aquatic organisms such as fish, mollusks [35], and crustaceans [34,35]. Furthermore, several Hsps have been found to be expressed in corals, including Hsps 95, 90, 78, 74, 70, 60, and small Hsps [32,36]. These proteins have also been found in Symbiodinium, including members of the Hsp70 and Hsp90 families [37]. It has been suggested that the expression of Hsps in healthy corals is inversely correlated with their susceptibility to bleaching, that is, corals with higher levels of Hsps are more tolerant to environmental stressors. In addition, it has been observed that the levels of Hsps in corals vary in response to bleaching in a species-specific manner, meaning that they could be considered as biomarkers of heat stress [36].
In many cases, the study of molecular biomarkers in coral reef species is conducted in controlled laboratory environments that may not fully represent the conditions that these species are exposed to in their natural habitats, which may directly impact the resulting data [38]. For this reason, methodologies that allow for the sampling of species directly on coral reefs in an accessible, non-invasive, continuous, and economic manner are required to allow for the analysis of molecular biomarkers in situ.

Table 1.
Examples of molecular biomarkers analyzed in reef species.
Table 1.
Examples of molecular biomarkers analyzed in reef species.
| Biomarkers Analyzed | Stress or Disease | Species or Material | Study Location | Sampling Location | Sampling Method | Ref. |
|---|---|---|---|---|---|---|
| Lipid peroxidation Total antioxidant capacity | Oxidative stress | Corals: Mussismilia harttii Millepora alcicornis | Field | Recife de Fora Marine Protected Area, Porto Seguro, Bahia, Brazil (South Atlantic reef) | SCUBA diving | [39] |
| General ROS Reduced glutathione (GSH) Lipid peroxidation | Oxidative stress | Coral Pocillopora damicornis | Lab | Kaneohe Bay, Oahu, Hawai’i | - | [22] |
| NOS activity ROS | NO production Oxidative stress | Symbiont algae from the coral Pocillopora acuta | Field and Lab | Fringing reef adjacent to the Hawai’i Institute of Marine Biology | - | [31] |
| Hsp70 Hsp60 Hsp32 (Heme oxygenase-1) | Thermal stress | Corals: Goniopora lobata Porites lobata Seriatopora hystrix Stylophora pistillata | Field | Reefs of the central Red Sea near Thuwal, Saudi Arabia | SCUBA diving | [36] |
In recent decades, remote sensing technologies have been used to monitor large marine areas for the assessment of spatial patterns as well as to provide continuous observations for the assessment of temporal patterns. These technologies include satellite imagery, unmanned aerial systems, and marine robots (Figure 2). Such methods provide information about the coral reef ecosystem, including its extent, reef type, geomorphological zonation, reef substrate, and benthic structure [4,9]. In recent years, drones and small autonomous surface vehicles have been used for mapping and monitoring coral reefs in shallow areas (<20 m depth) [40,41]. Furthermore, remotely operated vehicles have been used to monitor benthic habitats and marine fish communities, yielding good results as well as new challenges [42,43]. This review aims to generate a synthesis of marine robotic technologies which are useful for mapping coral reefs and assessing the current biological status of reef ecosystems from both an ecological perspective (through the quantification of live coral cover, estimation of biological diversity, and quantification of the abundance of species that play important roles within the ecosystem) and a functional perspective (through the monitoring of molecular biomarkers indicating damage caused by environmental stress). Furthermore, this review recognizes the importance of using remote sensing and artificial intelligence tools for the implementation of continuous and long-term monitoring programs for marine ecosystems by providing information to help in making management decisions for their protection and conservation.
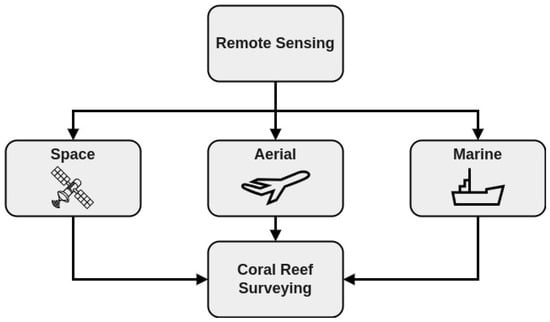
Figure 2.
Technologies used in remote sensing applications for coral reef surveying.
2. Coral Reef Applications Using Remote Sensing Technologies
Geospatial information sciences have had an impressive impact on most fields of knowledge, having emerged as a powerful tool for the management of massive data, allowing for a quick overview of research concerns in terms of spatial demands. The increasing vulnerability of coral reefs can be addressed using these observation tools, including approaches based on remote sensing and artificial intelligence.
A characteristic that prevails in any remote sensing system is the avoidance of physical contact with the target during both analytical measurements and advanced calculations conducted on the obtained data. A formal definition provided in the literature of a remote sensing approach applicable to coral reefs is as follows: “Remote sensing is the collection of data without coming into physical contact with the target. In the field of earth, atmosphere and ocean observation, remote sensing generally refers to the use of imaging sensor technologies by ways of aircraft, satellites, ships, and buoys. The target information is carried to a sensor by the electromagnetic radiation or by acoustic sound waves” [44] (p. 920).
The concept of remote sensing in the context of the mapping, monitoring, and management of coral reef ecosystems allows knowledge about these environments to be obtained, taking different spatial scales into consideration according to the available technologies [45,46]. These remote sensing technologies are based on two categories that allow for the capture of information from the environment in terms of the passive or active management of electromagnetic energy. In the former, the technologies only capture the reflection of the visible spectrum of energy provided by solar radiation (e.g., digital cameras and satellite imagery); in the latter, they capture the reflection of the energy emitted through the propagation of a defined signal, such as acoustic signals or laser. Additionally, data types used in remote sensing technologies, such as photographic, multispectral, hyperspectral, radar (Radiofrequency Detection and Ranging), sonar (Sound Navigation and Ranging), and LiDAR (Light Detection and Ranging) data, may be useful for the monitoring of coral reefs.
2.1. Vehicles and Digital Image Processing Used for Coral Reef Surveying
2.1.1. Satellite Imagery
The enormous biodiversity that is characteristic of coral reef ecosystems has been affected by different human and natural disturbances, which has increased their vulnerability [47,48]. For this reason, several investigations have focused on the characterization and classification of organisms and their damage in these ecosystems, as it has been found that different methods can be utilized to provide a diagnosis of the health status of organisms [9,49,50]. In this way, the use of remote sensing technologies has been useful in aerospace and underwater matters (Figure 2). Monitoring and mapping applications using satellite imagery for this purpose have been reported in [50,51,52], while applications for the detection of coral bleaching and its analysis have been described in [53,54,55].
2.1.2. Unmanned Aerial Vehicles (UAVs)
In an effort to uncover the maximum level of detail possible on the Earth’s surface, UAVs are increasingly being used around the world, with creative and innovative designs focused on achieving optimal performance in terms of size, weight, and autonomy. Yang et al. [56] have reported several UAV (Unmanned Aerial Vehicle) models and a variety of applications in the context of marine monitoring. Some recent UAVs for monitoring and mapping coral reef have been detailed in [57,58,59,60], as well as examples of photogrammetry for coral reefs [61,62,63], and applications using hyperspectral and multispectral cameras [40,64,65,66]. Meanwhile, discovering the underwater world remains a challenge due to the complexity of the environments that humans can access. For this reason, the evolution of the development and design of unmanned marine vehicles maintains a significant difference when compared to manufactured UAVs.
2.1.3. Digital Image Processing
In order to monitor coral reefs more closely and obtain a greater level of detail in relation to their spatial scale through remote sensing data provided by marine vehicles, it is necessary to capture optical and acoustic data of coral reef areas, then use computer vision and digital image processing techniques for inspection applications. This is particularly the case when it comes to the detection of any type of damage patterns on coral reefs. Thus, 3D reconstructions of regions of interest using the structure from motion (SFM) approach have been obtained for the characterization and mapping of coral reefs [67,68,69,70]. On the other hand, according to [9,71,72], in situ data such as acoustic, optical, and biophysical samples can be obtained through the operation of unmanned marine vehicles for coral reef detection in accordance with their depth capabilities. The geographic distribution of coral reefs generally lies around the fringe between the Tropics of Capricorn and Cancer; reefs are best-developed in warm and clear tropical waters less than 50 m deep, where the environmental conditions are favorable for their proliferation [2,44]. Nevertheless, thanks to advances in long-range depth navigation technology, other types of reefs have been discovered that can survive in extreme temperatures and even at depths around 2000 m [73], for which data acquisition was carried out using a heavy-duty ROV (Remotely Operated Vehicle). At the end of this section, we detail a variety of marine robots related to this problem.
2.1.4. Artificial Intelligence (AI)
Artificial intelligence (AI) is focused on creating machines that imitate human thinking, as AI has been designed to simulate human learning through a computer. In early AI research advances, scientists developed algorithms to approximate human intuition through simple rules of conditional responses programmed into a computer. However, imitating the complexity of the human mind has led to the programming paradigm involving more complex algorithms in relation to the accuracy of response capabilities. Among the objectives of AI are to emulate some capabilities of human intelligence, such as reasoning, vision, learning, speech, and problem-solving. Therefore, AI methods have been useful for prediction, classification, learning, planning, reasoning, and perception simulating human intelligence [74].
AI has made it possible to generate a large amount of information, and has been used in almost all fields of scientific and technological application [74]. Advances in AI have expanded in recent years, including topics such as machine learning, deep learning, fuzzy systems, genetic algorithms, cellular automata, and more. These approaches have been developed according to particular problem statements and their respective degrees of complexity and uncertainty. In the context of coral reef monitoring, the problem of species classification and identification of vulnerability patterns in them is usually encountered [49]. On the other hand, artificial intelligence methods have been applied to obtain knowledge of marine vehicle dynamics, usually to solve prediction problem related to their motion, the identification of controller and system parameters [75,76,77,78,79], and control schemes for the regulation and tracking of vehicle motion, often taking advantage of the vehicle model-free approach for characterization of the dynamic response [80,81]. Moreover, control schemes have been proposed using AI methods to solve the state estimation problem for the navigation of underwater vehicles [82,83,84].
This review focuses on the challenges of applying AI techniques to coral reefs, and more specifically on identifying patterns of vulnerability in reefs [85,86,87,88,89]. In this context, machine learning (ML) and deep learning (DL) are among the AI techniques implemented for characterization and classification of coral reefs and for their vulnerability analysis at different spatial scales [49,90,91,92,93]. These software tools have been useful in solving reef identification problems in these ecosystems more directly [94]. Furthermore, many algorithms are available for use through both open-source tools and licensed programs. Software tools have been developed and used for the classification of coral reef images in order to classify reef varieties and detect patterns showing different types of reef damage, with examples including applications such as Coralnet [95], ReefCloud [96], and TagLab [97].
Recent applications leveraging AI tools for the classification of coral reef using unmanned underwater vehicles have been reported in [98,99,100]. Processing-intensive tasks such as 3D reconstruction and classification algorithms are typically performed after capturing images.
2.2. Marine Robotics
The next subsections broadly describe the diversity of unmanned marine vehicles that have been developed for ocean exploration along with the challenges. Generally, marine vehicles are designed according to the complexity of the challenges that they must face, that is, their technical capabilities must be viable with respect to the environmental conditions of the study region in which they are to operate. In this way, marine vehicles have been classified according to their degree of autonomy and their geospatial capabilities [101,102,103]. At present, applications requiring the operation of unmanned marine vehicles include oil industry-related missions, underwater mapping and monitoring, ocean weather exploration, mine detection, underwater archaeology, and monitoring of environmental issues such as fuel leak detection and inspection of coral reef bleaching [4,83,104].
Various designs of unmanned marine vehicles have been reported in the literature [84,104,105]. These vehicles tend to maintain common characteristics, including their physical design (e.g., shape, size, weight), autonomy, and environmental capabilities as well as their applications and challenges. Furthermore, other concerns are always involved in the design and development of such vehicles, including watertightness, hydrodynamic design, electronic communication, efficient energy consumption, and safety. A predominant characteristic in the design and development of these vehicles is maneuverability; this specification defines the type of vehicle and its category. Several of these categories are detailed below, including Unmanned Underwater Vehicles (UUVs), Unmanned Surface Vehicles (USVs), bio-inspired vehicles, buoys, gliders, and more.
A summary of marine robots is shown in Figure 3, which provides an updated categorical means of classifying unmanned marine vehicle developments based on the recent literature in the field [102,106,107]. The most innovative vehicles are briefly explained in terms of their type of autonomy. It is important to mention that the main characteristics related to their size, weight, and shape are not considered in the vehicle categories, with the exception of gliders, which have a well-defined and particular design.
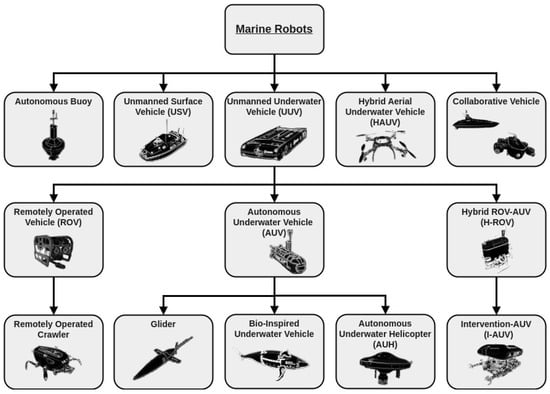
Figure 3.
Unmanned marine vehicle categories.
To address the associated research challenges, autonomy is the most common requirement, appearing in almost all developed unmanned marine vehicles. As long as the vehicle is unmanned, there will surely always be at least one autonomy mechanism in its design; therefore, the need for partial or total autonomy in the development of a marine vehicle defines the level of complexity of the challenges related to both vehicle dynamics and navigation.
2.3. Autonomous Buoys
Different type of prototypes of marine vehicles have been designed, taking environmental constraints and restrictions as energy consumption into account in terms of costs and benefits of their development. Among the variety of unmanned vehicles, a specific type consists of floats and buoys. There is a great diversity of such vehicles addressing applications requiring autonomy in oceanic research. In this review, we consider these buoys in the context of the different technologies used in coral reef studies at different scales of detail and depth. Buoys have several strengths and distinguished capabilities compared to traditional UUVs, mainly related to power management, communications, and big data storage. Their design and dynamics allow for reduced energy consumption over long periods of time, and their ability to use solar energy facilitates greater autonomy. According to their communication systems, antennas and radio modules are sufficient to ensure communication between sensor nodes in hostile weather conditions, taking advantage of the use of GPS (Global Positioning System) for localization. In addition, buoys can establish communication from the ocean surface to vehicles working on the seabed, allowing for integration with other technologies such as satellite systems, aerial systems, and almost all UUVs.
Thanks to their data storage capability, these systems are commonly used for monitoring ocean climate variables over long periods of time. They are built to successfully perform remote sensing measurements of temperature and atmospheric pressure, making them suitable and easy to integrate with new surface or underwater sensors, especially when physical–chemical data (e.g., pH (power of Hydrogen), salinity, and turbidity) must be captured [108]. Buoys are considered as strong information-capturing hotspots at static locations with good stability for deployment in shallow waters, and are much less invasive compared to UUVs when used to capture information from marine animals.
The use of autonomous buoys is under continuous development, and they are available for multi-robot applications and cooperative missions while being scalable to large study regions. Therefore, this type of aquatic technology can serve as a good strategic component in an integrated global system for coral reef monitoring. Recent applications using buoy swarms have been described in [109,110]. Other research studies have focused on energy management optimization and the monitoring of shallow marine environments [111,112]. Low-cost buoy prototypes have been manufactured for ocean monitoring and strategic sensory data access [113,114]. Problems related to the buoy control approach have been described in [115,116], the latter implementing an ocean profile survey using an autonomous buoy configuration.
2.4. Unmanned Surface Vehicles (USVs)
According to [117], marine vessels include high-speed craft, semi-submersibles, floating rigs, and all vehicles that are self-propelled beneath the water or on its surface. In particular, vehicles that are distinguished by their autonomy in crossing the ocean surface are known as Uncrewed (Unmanned) Surface Vessels (USVs). USVs are also referred to Autonomous Surface Crafts (ASCs) or Autonomous Surface Vehicles/Vessels (ASVs) [118]. USVs are vehicles that contain their own onboard power and are controlled by a remote operator through a communication link [119]. Usually, the horizontal motion of USVs is described by three degrees of freedom (DoFs), consisting of the surge, sway, and yaw motion components, such that the dynamics associated with the motions in the heave, roll, and pitch dimensions are neglected [117]. This feature helps to make these vehicles viable for communication through access to GNSS (Global Navigation Satellite System) signals, making them more effective and affordable through the use of global positioning systems. Furthermore, these vehicles can tow a large number of devices for monitoring and inspection tasks under diverse levels of ocean exploration demands [120]. Therefore, USVs are capable of long-range navigation tasks. Furthermore, their high-bandwidth wireless data systems have allowed for their growth and widespread use in many applications [121], from modeling and control of USVs [122,123] to different missions such as security and surveillance [104,124] and both bathymetric and shallow-water seabed exploration [102,107]. Additionally, USVs have been used in cooperative applications, typically leader–follower and formation control missions that include motion planning, trajectory tracking, and path following [125,126].
2.5. Unmanned Underwater Vehicles (UUVs)
The definition of an “Underwater Vehicle” in the context of marine robotics refers to all small vehicles that are capable of propelling themselves beneath the water surface or on it, which includes Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs) [117]. Both ROVs and AUVs share some automatic control problems, which is why they have collectively been called Unmanned Underwater Vehicles (UUVs) [105]. There are several challenges regarding the ongoing development and use of UUVs in civil and military applications. As such, the evolution from ROVs to AUVs has generated new challenges related to manipulation tasks in underwater enclosures, leading to the production of intervention AUVs and Hybrid Remotely Operated Underwater Vehicles (H-ROVs) endowed with manipulation capabilities [102,104]. In this review, three subcategories derived from the development of UUVs are defined: ROVs, AUVs, and H-ROVs and their derived marine robots, as depicted in Figure 3 and briefly described in this part. It should be noted that the evolution and improvement of UUVs are undergoing continuous progress, with developments depending on demand as well as challenges that require special and innovative designs [84,106,127].
2.5.1. Remotely Operated Vehicles (ROVs)
In the history of marine robots, Remotely Operated Vehicles (ROVs) were first introduced to industry in the 1960s. ROVs were initially designed for marine science and rescue operations and to date have often been used as potential tools for oil and gas exploitation, as they can reach significant depths compared to human divers. Furthermore, ROVs are robotic systems that have been teleoperated to overcome various challenges in construction, repair, and maintenance, and have become the mainstream tool for underwater operations [102,107]. The definition of an ROV is derived from the term Remotely Operated Vehicle, which denotes an underwater vehicle physically linked by a tether to an operator, who may be on a submarine or surface vessel. The tether supplies power and exchanges information to the vehicle to close the manned control loop [105,127]. The data carried by the ROV allow for decisions to be made in exploration; it is mainly for this reason that ROVs have continued to be widely used, as their manipulation capabilities are very useful [102]. A typical ROV consists of a sturdy frame containing a float that provides buoyancy to the vehicle. These vehicles generally have marginally positive buoyancy and can be propelled in all three dimensions through the use of multiple thrusters. The operational requirements and depth rating of the vehicle are subject to the size of the frame, which is equipped with a series of sensors, instruments, and tools. The most basic ROV configuration includes at least one camera to transmit data to the onboard operator in real time. Advanced ROVs may include other sensors, such as optical and chemical sensors, CTDs (conductivity, temperature, and depth sensors), high-definition (HD) cameras, sonars, multibeam echo sounders, and suction samplers. Therefore, ROVs can be classified according to their size and technical capabilities. Various developments and applications of ROVs have been reported in [106,128,129]. On the other hand, a distinctive feature of the use of ROVs is safety, as these vehicles can avoid risks in manned missions. For example, if a skilled human operator is in charge of commanding the vehicle, the operator can apply an appropriate fault detection strategy in the case of ROV failure, and can also decide whether the vehicle should be recovered or whether to abort the mission [105].
Generally, the motion of a 6-DoF underwater vehicle moving at high speed is highly nonlinear and coupled. In applications using ROVs, the vehicle is normally only able to move at low speed, which allows the hydrodynamic effects in the three planes of symmetry of the vehicle to be neglected in the analysis of the dynamic model [130]. Moreover, the steady-state linear and angular velocity components reach equilibrium at the roll and pitch angles when the ROV moves in the longitudinal plane, with non-zero velocity components in surge (x) and heave (z) directions in many ROV applications, which allows the time-varying matrices of the dynamic model of ROV to be simplified to constant matrices [130]. Among recent applications using this type of vehicle, modeling and control [131,132], SLAM (Simultaneous Localization and Mapping) [133,134], 3D reconstruction [135,136], and environmental monitoring and mapping [137] stand out among others that are used for the surveying of coral reefs, as detailed in Section 2.8.
Remotely Operated Crawlers (ROCs)
ROCs are vehicles that have the faculty to move in two ways, walking and swimming, allowing them to move on land or under water through the use of wheels that help to stabilize their horizontal movements. These vehicles are designed with an appropriate weight and center of buoyancy, and make use of gravity. They are useful for manipulating objects and acquiring measurements on long-duration missions, as they are very stable platforms on the seabed. ROCs belong to the ROV class of unmanned underwater vehicles, as they are controlled using tethered communication with other mobile digital entities to transfer sensory data and handle feedback signals. This feature has made ROC (Remotely Operated Crawler) vehicles suitable for rescue applications, as they are capable of immediate responses in hostile underwater scenarios [138,139,140].
ROCs can be powerful tools for missions on the seabed that require gripping and pick-and-place tasks, taking advantage of their stability due to the ability to control the restoring forces that act on the thrust of the vehicle. The DoFs of these vehicles are reduced to its surge, sway, and yaw movements [141]. Obviously, these characteristics help in underwater handling routines, especially in cases that require restoration tasks in affected areas; however, in the treatment of coral reefs and their restoration, ROCs should be used carefully and operated only in areas where they do not affect the organisms in the coral reef ecosystem [142,143,144]. As detailed in Section 2.8, use of this type of vehicle has not been reported for missions that include studies of coral reefs; however, an amphibious vehicle designed for coral reef applications called “Aqua”, which is similar in design to ROCs and belongs to the class of bio-inspired underwater vehicles, was reported in [145].
2.5.2. Autonomous Underwater Vehicles (AUVs)
Compared to ROVs, AUVs are untethered marine vehicles, and as such do not have the limitations that come with the tethers of ROVs. Although ROVs have advantages regarding power and digital communications, AUVs outperform ROVs in terms of mobility, as they are free-swimming in their navigation and have been designed to tackle other complex navigation tasks in which they have to make their own decisions in missions. The main goal of an AUV (Autonomous Underwater Vehicle) is to perform previously programmed tasks, providing the greatest possible autonomy in unknown underwater areas without human intervention. These vehicles contain an embedded system made up of sensors, computers, and actuators that validate the control algorithms and provide their autonomy. Similar to ROVs, AUVs can be equipped with a variety of sensors (inertial sensors, cameras, sonars, CTDs, chemical sensors, etc.) depending on their size and depth range. However, the lack of a tether and consequently direct power input, limits the energy consumption of the sensors as well as possible mission duration. The endurance of an AUV typically ranges from a few hours to several days, although rapid technological advances now enable long-range operations with endurance extending to weeks or even months. Therefore, AUVs must be completely autonomous and rely on their onboard power system and intelligence [105].
AUV operating depths range from several meters for the smallest vehicles to full ocean depth for the largest models. AUVs are typically classified as cruising or hovering vehicles; cruising AUVs are generally torpedo-shaped and powered by a single propeller, while hovering AUVs have multiple propellers, allowing them to move in any direction similar to an ROV and providing them with high maneuverability [106].
AUVs are continually advancing in scientific, military, and commercial applications, and have been in development since the 1960s. At present, the robust manufacturing of innovative and powerful AUV models is the main concern in various areas of ocean research seeking to meet the most complex challenges of on-demand underwater exploration. For reference, ref. [146] provided a review including relevant information on AUV development trends, covering the detailed design of AUVs, the implementation of major localization, navigation, and mapping methods such as SLAM, and collaborative tasks using multiple AUVs. Additionally, a more recent review reported an increased focus on the application of AUVs in the context of various navigation challenges, covering research on the essential framework of the dynamic model of AUVs as well as autonomy strategies for vehicle navigation based on classical techniques such as dead reckoning, signal-based navigation, and map-matching navigation [83]. The implementation and use of these techniques in AUV navigation stands out in scientific applications such as environmental monitoring, bathymetric data collection and seabed mapping, archaeological studies, exploration in extreme environments, and physical, biological, and chemical sampling. Implicit in each scientific application are tasks which must be programmed sequentially and in a well-organized manner, such as cartography, object detection, motion planning, path following, and so on [83,107,146]. On the other hand, it is worth noting that the evolution of AUVs has been improving thanks to technological advances in terms of the smaller-scale integration of electronic devices such as sensors, computers, and transducers. Furthermore, the existence of new lightweight materials has been taken advantage of to benefit the hydrodynamic design of AUVs. Therefore, AUVs with improvements in size and weight, compactness, and hydrodynamics have recently been developed, demonstrating several advantages [84,104]. As AUVs are best suited for surveying operations and acquiring sensor data along smooth preprogrammed tracklines, they have been designed for precision operations, slow motion surveys, and operations over different three-dimensional terrain features such as hydrothermal vents and coral reefs [104,106,107].
A large number of innovative AUV designs have been reported worldwide. The scientific community has ventured into different degrees of complexity and various challenges for AUV development. These vehicles may appear in the literature to solve basic tasks focused on the kinematics and dynamics of the vehicle, and may be designed to address real underwater tasks subject to hostile environmental limitations in terms of depth, unknown environment, and uncertainties caused by weather disturbances [147,148]. All specific missions to be conducted by the vehicles are tested through validation and experiments under different environmental conditions in order to approximate their performance in real scenarios. Certain tasks, such as mapping, object detection, and motion planning, are required for missions in real environments such as bathymetric mapping, seabed inspection, and prospecting of twilight marine areas [149,150,151]. Recent prototypes such as those reported in [152,153] have been constructed through integrating low-cost hardware and open source software while attempting to obtain the best performance of the vehicle in controlled missions. Other AUV designs, such as the one presented in [154], offer proposals that emphasize hydrodynamic design through CFD (Computational Fluid Dynamics) analysis and control applied to hover stability, specifically for the development of an AUV considering certain environmental limitations through simulations. Furthermore, some AUVs that have already been designed with improvements to address specific automatic tasks under environmental constraints have been reported in the literature, such as [155] and the ALICE AUV introduced in [156]. Furthermore, the scientific community is interested in developing innovative AUV prototypes that are useful in the context of environmental protection, such as AUVs for the detection and collection of underwater garbage. For example, the AUV in [157] was specifically designed to detect and classify different types of underwater plastic pollution. Among other applications, AUVs for coral reef surveying have been developed, which are listed in Section 2.8.
Gliders
Unmanned vehicles that maintain a defined torpedo-like shape through the consideration of planing hydrodynamics are known as gliders. These vehicles can belong to the AUV class. The definition of a glider was announced to the oceanographic community in 1989 through the development of a glider concept called Slocum, named after Joshua Slocum, who made the first solo circumnavigation of the globe in a sailing vessel [104,158]. Gliders have been designed to cruise several kilometers for long periods of time. They must include their own power provider to support long missions, and can operate continuously for weeks or months at low speeds and low drag while limiting their power consumption through the use of low-power instrumentation [159,160,161]. A distinctive feature of gliders is their optimized energy consumption thanks to their lightweight design, which includes a minimal actuator system to operate efficiently in navigation. They often contain a ballast system for diving motion, and have been designed to reduce their hydrodynamic effects, enabling long-distance travel. These vehicles have been used for exploration missions such as bathymetric mapping [162,163], ocean climate monitoring [164,165], and characterization of ocean currents [161,166] as well as in formation control strategies for collaborative missions [167,168,169]. Typical gliders that have been used for ocean exploration include Slocum [158], Spray [170], and SeaGlider [171].
Bio-Inspired Underwater Vehicles
Bio-inspired AUVs are vehicles that have the ability to imitate the movement of certain marine species, which is the main feature of these novel AUV designs. This definition implies that AUVs must resemble the particular animal to be imitated and that their structure and joints must be constructed in detail based on the marine species being referenced. There is an enormous diversity of marine animals with a wide variety of phenotypes, complicating the choice of organism for imitation; however, knowing the ecosystem in which the AUV must navigate provides a reference regarding the marine life to be taken into account when navigating and how it can be best preserved. Current bio-inspired AUVs have been designed based on turtles [172,173,174], stingrays [175,176], fish [177], shrimp [178], and jellyfish [179], among other species [180,181,182,183]. Additionally, other artifacts or parts of mechanisms that enhance the bio-inspired design of the vehicle can be considered [183,184,185]. Recent developments include manta ray AUVs; these vehicles are very innovative in the way in which they can suddenly move through strategic displacements while remaining in continuity with the mission [176]. In fact, a novel AUV category that derives from stingray-based designs has emerged; these vehicles are called AUHs (Autonomous Underwater Helicopters), which are described in more detail below.
Autonomous Underwater Helicopters (AUHs)
The AUV category in Figure 3 includes innovative vehicles called AUHs, which have only recently been defined. While these vehicles maintain the capabilities of traditional AUVs, their development is based on imitating the movement of the manta ray. As such, they could form a category derived from bio-inspired AUVs; however, this is not necessarily the case, as these vehicles can take different forms in their designs relative to the study area or ecosystem under navigation and depending on their shell or structure. The main difference lies in their dynamics, as they can remain static or moving depending on the mission; for example, these vehicles are useful when the vehicle is required to remain on the seabed without any movement, simply capturing information about the study area, before continuing with its mission. As a result, they can be designed with reduced energy consumption and extended autonomy. In [103,186,187,188], impressive vehicles with dynamics and capabilities resembling those of a helicopter were designed for operation in caves and irregular places where AUVs and ROVs normally encounter difficulties.
2.5.3. Hybrid Remotely Operated Underwater Vehicles (H-ROVs)
H-ROVs have been designed to operate based on the principles of both ROVs and AUVs, which means that they can be used either on- or off-tether depending on the configuration mode required for the mission. These types of vehicles are becoming increasing popular due to the complexity that they can achieve through their abilities in both modes of operation. Research on this topic has indicated the development of hybrid vehicles that form a relevant part of a global system during missions; to date, this has been an open and not very well defined topic [189,190]. According to [102], this remains an area of ongoing research and is likely the key technological development needed to bring AUVs into the mainstream of underwater operations. Examples of H-ROVs have been noted in [191,192]; these vehicles must be robust and viable for various operations, with hybrid functionality highlighted as being among their most relevant capabilities.
Intervention Autonomous Underwater Vehicles (I-AUVs)
Underwater vehicles that assume either or both functions of AUVs and ROVs and are endowed with one or more manipulators for intervention tasks are called Intervention Autonomous Underwater Vehicles [102,105]. This last category of UUV (Unmanned Underwater Vehicle) defined in Figure 3 has the potential for novel development of unmanned vehicles with great versatility for inspection and handling applications in underwater environments. I-AUVs have a notable feature in that they are capable of operating with partial autonomy in their missions, giving them better teleoperation capabilities in real-world scenarios, particularly when the vehicle needs to perform manipulation tasks such as pick and place, grasping, and valve-closing operations. Similar to H-ROVs, these vehicles are in development and there remain open research gaps that need to be addressed for the effective design of I-AUVs, such as adding manipulators to the vehicle and considering the payload in missions, which increases the complexity of the vehicle’s dynamics from the control point of view [105]. Examples of I-AUVs have been discussed in [193,194,195,196,197], and there are already a few projects that have included them [198,199].
2.6. Hybrid Aerial Underwater Vehicles (HAUVs)
Another category of marine robots shown in Figure 3 that has recently emerged in the field of marine robotics is Hybrid Aerial Underwater Vehicles (HAUVs). These vehicles are distinguished by having both UAV and AUV capabilities. The scientific community has attempted to develop innovative unmanned vehicles with greater autonomy that are subject to environments composed of both water and air, where the air–water transition of these vehicles represents a key research gap [200]. This research topic aims to address the development of HAUVs manufactured and based on marine bio-inspiration, specifically those that are biomimetic of marine animals that can move in both environments, such as certain predatory birds [182]. These innovative vehicles must be very robust in order to obtain the greatest versatility and maneuverability between aerial and underwater environments, as both environments can be very complex in terms of the dynamics of the vehicles and their control under uncertainties while considering the effects of fluid mechanics. Therefore, HAUVs are still under development at present; recent references show that some examples tend to take the form of a quadcopter [201,202,203,204,205,206,207,208,209,210].
2.7. Collaborative Vehicles
Robotics applications have the potential to solve real-world problems associated with natural disasters around the world through collaborative missions that involve air, ground, and underwater robots. The trends in this research theme consist of the development of complex tasks and missions involving the operation of multiple robots which are synchronized and well-coordinated around the location of the problem and that require little or no human intervention [211]. This subsection discusses the collaborative robots category shown in Figure 3. This group includes vehicles that need to work collaboratively during missions considering two or more aquatic agents to solve a specific task [212,213,214]. In other words, collaborative vehicles are those used in underwater scenarios rely on multiple aquatic vehicles or robots acting in a coordinated manner to address an issue. This category considers all of the above-mentioned types of marine robots when working together in a particular combination, along with various swarm robot applications [215,216,217,218]. For example, in [177] the use of multiple bio-inspired vehicles was leveraged for monitoring and searching applications in coral reef environments.
The initial challenges faced when using collaborative vehicles provided the impetus to solve the leader–follower problem [219]. Several studies have reported the challenges involved when working with multiple AUVs, while others have demonstrated the application of leader–follower behavior using at least two vehicles. One example involves the combination of a USV (Unmanned Surface Vehicle) and an AUV, in which the USV captures GPS measurements to establish waypoints on the surface, then the AUV uses the reference from the USV for underwater localization and decision-making [125,126,220]. The same application has been performed using multiple AUVs in missions, with the route followed as a tracking trajectory. Collaborative AUV missions with leader–follower operations can be useful for monitoring marine life for ecosystem protection, for example as reported in [221].
To date, advances in marine robotics in this area have been carried out in a variety of ways, from cooperative manipulation challenges to the use of underwater humanoid robots to retrieve objects. In the latter case, underwater robots can assist in difficult missions carried out by divers through collaborative tasks [102,146]. Significant advances have been made in this area; for example, in [190] the authors detailed expeditions focused on the task of collecting ancient objects from the ocean floor.
Considering our observations supported by the literature regarding the advances and trends in marine robotics, there has been significant development of marine vehicles and their derivatives according to a wide variety of specific applications. In addition, the use of available technologies such as MEMS (Micro Electro-Mechanical Systems) devices and novel materials manufactured in different fields of engineering has promoted the development and realization of novel prototypes by academics or professionals, allowing for participation in new ideas and challenges and opening up research in the field of marine robotics in different capacities and at different levels of complexity [84,146]. In the following subsection, we focus on marine vehicles, mainly innovative and robust developments that have been specifically designed and applied for the study of coral reefs.
2.8. Coral Reef Applications Using Marine Vehicles
This subsection briefly presents some innovative and robust vehicles that are designed for specific applications in the complex environments characterizing coral reef ecosystems. Several of them are marine vehicles intended for data collection, mainly for the detection of coral reef vulnerability and its characterization. A brief list of the marine vehicles developed to work in coral reef environments is presented below, including their technical data and capabilities, first considering innovative marine vehicles, then robust or mature marine vehicles, including those produced with specific improvements or modified for particular research missions.
2.8.1. Innovative Marine Vehicles Used for Coral Reef Surveying
An overview of innovative marine vehicles used specifically for coral reef surveys is presented in the following tables. Table 2 provides the design and construction features of the innovative marine vehicles, while Table 3 includes highlights regarding their technical capabilities when applied to coral reef surveys.
Table 2.
Innovative marine vehicles used in coral reef applications (design and construction features). The following indications mean: — (Information not available in references), NA (Not Applied), ✓ (Device or capabilitie provided in the vehicle).
Table 3.
Innovative marine vehicles used in coral reef applications (technical capabilities).
2.8.2. Mature Marine Vehicles Used for Coral Reef Surveying
There are a number vehicles that stand out according to their designs and that have maintained institutional support from civil, military, or governmental organizations. For this reason, they are being developed for applications in autonomous scenarios with high demands for robustness. At present, there is a great variety of such vehicles, many of which have been improved based on technological advances in the creation of light materials and the minimum scale of electronic components integrated into their embedded systems. These vehicles have been designed and applied in various underwater challenges, most of them deriving from academical projects that are being developed in response to demands in terms of their versatility, operability, and design at low cost. In addition, in this review we also consider vehicles that have gone through a commercial process, which can offer greater support for their operation. It can be observed that several of these are classed as ROVs, meaning that their relative autonomy depends on human management through teleoperation in their navigation and monitoring routines.
The characteristics of mature marine vehicles for general use in reef research science are outlined in the following tables. Table 4 describes the design and construction features of mature marine vehicles, while Table 5 includes the most important information about their technical capabilities when applied for the study of coral reefs.
Table 4.
Mature UUVs used in coral reef applications (design and construction). The following indications mean: — (Information not available in references), NA (Not Applied), ✓ (Device or capabilitie provided in the vehicle).
Table 5.
Mature UUVs used in coral reef applications (technical capabilities).
3. Discussion
The comprehensive monitoring of coral reefs by mapping their distribution, condition and extent as well as evaluating their biological, physical, and chemical components and their interactions is necessary in order to know their status and health. This information is relevant for authorities who need to make decisions in favor of the conservation, restoration and sustainable use of reefs, which is urgent in light of the projected collapse of reefs within a few decades [4,11,72]. However, the inspection of these ecosystems presents several challenges due to their underwater locations, which are often-remote, as well as the considerations that must be taken into account to avoid damaging them [72,233,241,242].
Many studies of coral reefs are conducted by direct surveys via SCUBA diving. However, these methods have several limitations, such as their inherent subjectivity and lack of consistent repeatability, human capabilities regarding duration, depth and access when making observations, and high time and cost requirements for routine monitoring [4]. In addition, it is important to consider sample preservation from in situ acquisition to analysis on ship or in the laboratory and the need to maintain the quality and quantity of analytes. For example, in the study of molecular biomarkers and eDNA it is often necessary to keep samples at low temperatures and use stabilizers [233].
On the other hand, to circumvent the aforementioned inconveniences, many studies are carried out in laboratory environments where reef species are kept in aquariums or tanks under controlled conditions, such as temperature, light level and water flow, among others [22,31]. These controlled laboratory environments may not fully represent the natural conditions of coral reefs, which may directly impact the results or lead to biases being incorporated into the obtained data [38].
In general, the use of compact and light vehicles that have little to no impact on the ecosystem is appropriate for the study of reefs in shallow waters, such as the unmanned vehicles reported in [231,234]. Operators who are skilled in navigating in six DoFs can grant these vehicles the capacity to collect samples of the species that inhabit these ecosystems. An observed trend is the design of bio-inspired vehicles which imitate the capabilities of certain species adapted to these environments. For these vehicles, the aim is to use flexible and soft materials for the exoskeletons of the vehicles and rigid materials for their structure, which allows the essential components that make up the vehicle to be protected. The use of digital cameras to obtain 3D reconstructions is essential, as are devices and techniques that allow for geolocation of the vehicle. Lamps can provide greater illumination in regions characterized by opacity or a lack of lighting.
The analysis of reef vulnerability based on remote sensing studies depends on the potential of various information-capturing technologies in the study regions, such as satellite and remote technologies using autonomous vehicles close to the objects of study. Examples of these outstanding technologies include radar, sonar, multispectral, hyperspectral, and LiDAR, as well as digital imaging from conventional technologies. It is worth mentioning that the central ingredient for determining reef vulnerability through these technologies is the ability to achieve optimal image processing performance when carrying out segmentation and classification of the vulnerability patterns in organisms in order to achieve their characterization without subjecting them to any physical contact [223,224].
The use of AI techniques for reef classification has grown rapidly due to increasing robustness, accuracy, and response time when subjected to big data, especially for digital images. However, recent studies that have considered the problem of degraded coral reef characterization have reported that the issue goes beyond what a digital image can provide or what can be perceived from them [89]. Therefore, a more in-depth analysis of the vulnerability niches caused by environmental factors, invasive threats, or exploitation of enclosures is necessary, including the intrinsic characteristics of the study region. It is necessary to complement the storage of digital image data with in situ information from the sites of interest for more comprehensive research, for example through the sampling of biological, physical and chemical data and the monitoring of environmental variables that act in vulnerable areas, as the characterization of the vulnerability patterns of coral reefs can be expanded with these types of data, allowing signals such as bleaching and massive reef erosion that offer a better diagnosis in identifying damage to corals to be effectively captured [4,72,241].
On the other hand, AI has been used to characterize the diversity of marine species belonging to coral reef ecosystems, especially when it comes to identifying the health status of marine species by analyzing digital image. Recent research highlights the classification of marine species using the photo-identification method as well as the classification of disease types in marine species using digital image processing [243,244,245]. Furthermore, several applications of marine species classification are found in the identification of shape patterns of type of species shape that inhabit the coral reef ecosystem. This application leverages AI for the classification of marine species that are vulnerable to acquiring certain types of disease, as well as for the identification of invasive species that cause an imbalance in the ecosystem [222,228]. Studying the health status of some marine species in the coral reef ecosystem can also provide valuable information for the geospatial identification of reef vulnerability zones, where damage is not only expressed in coral reefs but is having consequences on the marine species that inhabit these ecosystems [246].
It should be noted that most coral reefs are found in tropical areas of the world and are located around developing countries, where investment into underwater technology is prohibitively expensive and the technical expertise to implement it is often lacking [242]. For this reason, we propose that one direction in which the future technological development of underwater vehicles used for mapping and monitoring reef ecosystems should be conducted is the adaptation to handle devices that allow for the collection of biological and environmental samples and images using low-cost vehicles such as the BlueROV2 [231]. These technological adaptations will provide an incentive to obtain environmental and biological samples for the estimation of biological diversity and biomarkers indicating environmental stress, taking reef research to new frontiers.
One important perspective on the technological advancement of unmanned vehicles used in marine research in the future is related to the design of autonomous vehicles that can realize real-time analysis of biological samples and geospatial data of the coral reef ecosystem to provide estimates of marine biodiversity. Advances have focused on using DNA from environmental samples (water, air, and soil samples), called environmental DNA (eDNA) or metabarcoding. At the molecular technological level, the development of portable devices that allow field work to perform DNA extraction, the performance of Polymerase Chain Reaction (PCR) with thermosensitive enzymes, and the creation of genomic libraries such as the portable laboratory Bentolab (Bento Bioworks Ltda.) and last-generation portable sequencers such as MinION technology (Oxford Nanopore Technology) allow for real-time genetic results within a few hours of a sample being collected. This technology has been tested to estimate biodiversity in situ in several ecosystems, including tropical rainforests [247], polar regions, coral reefs [248], and open ocean, helping in the identification of endangered species [249]; it has even been used in space exploration to search for alien DNA [250]. The next challenge would be to automate these biological research processes so that they can be carried out in automated vehicles and the results shared by satellite to allow access to the results around the world. For instance, Figure 4 shows a representative scheme of multi-domain unmanned robots working in synergy for coral reef surveying.
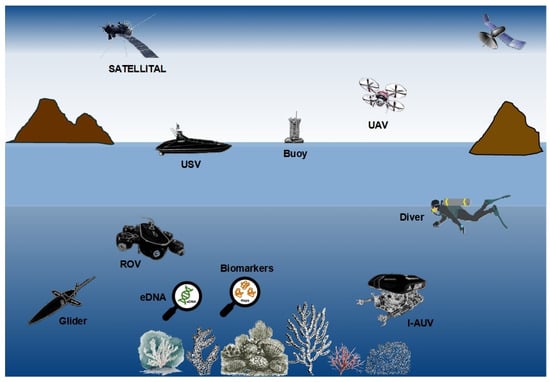
Figure 4.
Multi-domain robust technology for comprehensive monitoring of coral reefs.
4. Conclusions
Coral reefs are becoming the most degraded and threatened global ecosystem; for this reason, it is important to know their current distribution and status to help in making decisions for their protection. This review presents updated information on technological advances that can be employed in the monitoring of coral reefs through their mapping and biological assessment at the ecological and functional levels. We review the literature on remote sensing, artificial intelligence, and marine robotics, focusing mainly on the management of unmanned marine vehicles to directly reach particular ecosystems and habitats. Obtaining biological, physical, and chemical information on both organisms and their ecosystem environment takes the challenges of coral reef vulnerability research to another level of complexity, for example with regard to the identification and characterization of diseases that affect reefs. Importantly, several limitations must be considered when carrying out a survey in a specific implementation according to the study region, the budget for the use of instruments required in low-cost prototypes, and the feasibility of adapting sampling mechanisms to the prototype, as well as the need to protect the reef environment. Unmanned underwater vehicles are able to collect and preserve samples, analyze them in situ, and share the results in real time, allowing for continuous monitoring as well as inspection tasks. In spite of the fact that there has been some progress in this matter, multidisciplinary projects are still needed to develop, innovate, and combine the technologies analyzed in this study in order to achieve comprehensive, continuous, and long-term monitoring of coral reefs.
Author Contributions
Conceptualization, methodology, investigation, writing—original draft preparation, writing—review and editing: all authors; visualization and supervision: J.A.M.; project administration: A.M.R.-E. and J.A.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AI | Artificial Intelligence |
| AUH | Autonomous Underwater Helicopter |
| AUV | Autonomous Underwater Vehicle |
| ASC | Autonomous Surface Craft |
| ASV | Autonomous Surface Vehicle/Vessel |
| CFD | Computational Fluid Dynamics |
| CFP | Coral Fluorescent Protein |
| CNN | Convolutional Neural Networks |
| CTD | Conductivity, Temperature, and Depth |
| DEM | Digital Elevation Model |
| DNA | Deoxyribonucleic Acid |
| DoFs | Degrees of Freedom |
| DL | Deep Learning |
| DMS | Dimethylsulfide |
| DMSP | Dimethylsulfoniopropionate |
| DSM | Digital Surface Model |
| eDNA | environmental DNA |
| GFP | Green Fluorescent Protein |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| H-ROV | Hybrid Remotely Operated Underwater Vehicle |
| H2O2 | Hydrogen Peroxide |
| HAUV | Hybrid Aerial Underwater Vehicle |
| HD | High-Definition |
| HO• | Hydroxyl Radical |
| Hsp(s) | Heat Shock Protein(s) |
| I-AUV | Intervention Autonomous Underwater Vehicle |
| LIDAR | Light Detection and Ranging |
| MEMS | Micro Electro-Mechanical Systems |
| ML | Machine Learning |
| NN | Neural Networks |
| NO | Nitric Oxide |
| NOS | Nitric Oxide Synthase |
| Superoxide Anion | |
| 1O2 | Singlet Oxygen |
| PCR | Polymerase Chain Reaction |
| ONOO− | Peroxynitrite |
| pH | power of Hydrogen |
| RADAR | Radiofrequency Detection and Ranging |
| RNS | Reactive Nitrogen Species |
| ROC | Remotely Operated Crawler |
| ROS | Reactive Oxygen Species |
| ROV | Remotely Operated Vehicle |
| SFM | Structure From Motion |
| SLAM | Simultaneous Localization and Mapping |
| SOD | Superoxide Dismutase |
| SONAR | Sound Navigation and Ranging |
| UAV | Unmanned Aerial Vehicle |
| UUV | Unmanned Underwater Vehicle |
| USV | Unmanned Surface Vehicle |
References
- Alquezar, R.; Boyd, W. Development of Rapid, Cost Effective Coral Survey Technique: Tools for Management and Conservation Planning. J. Coast. Conserv. 2007, 11, 105–119. [Google Scholar] [CrossRef]
- Spalding, M.; Ravilious, C.; Green, E. World Atlas of Coral Reefs; University of California Press: Berkeley, CA, USA; Los Angeles, CA, USA; London, UK, 2001. [Google Scholar]
- Kaiser, M.J.; Attrill, M.J.; Jennings, S.; Thomas, D.N.; Barnes, D.K.A.; Polunin, N.V.C.; Raffaelli, D.G.; Williams, P. Marine Ecology: Processes, Systems, and Impacts; Oxford University Press Inc.: New York, NY, USA, 2005; 557p. [Google Scholar]
- Obura, D.O.; Aeby, G.; Amornthammarong, N.; Appeltans, W.; Bax, N.; Bishop, J.; Brainard, R.E.; Chan, S.; Fletcher, P.; Gordon, T.A.C.; et al. Coral reef monitoring, reef assessment technologies and ecosystem-based management. Front. Mar. Sci. 2019, 6, 580. [Google Scholar] [CrossRef]
- Allen Coral Atlas. Available online: Https://allencoralatlas.org/atlas?l=basemaplabels,crwbaa,monitoring,planet_2020,benthic&g=aca#1.91/-0.3686/27.1800 (accessed on 28 July 2024).
- Moberg, F.; Folke, C. Ecological goods and services of coral reef ecosystems. Ecol. Econ. 1999, 29, 215–233. [Google Scholar] [CrossRef]
- Hogson, G. A Global Assessment of Human Effects on Coral Reefs. Mar. Pollut. Bull. 1999, 38, 345–355. [Google Scholar] [CrossRef]
- Hughes, T.P.; Baird, A.H.; Bellwood, D.R.; Card, M.; Connolly, S.R.; Folke, C.; Grosberg, R.; Hoegh-Guldberg, O.; Jackson, J.B.C.; Kleypas, J.; et al. Climate Change, Human Impacts, and the Resilience of Coral Reefs. Science 2003, 301, 929–933. [Google Scholar] [CrossRef]
- Hedley, J.D.; Roelfsema, C.M.; Chollett, I.; Harborne, A.R.; Heron, S.F.; Weeks, S.J.; Skirving, W.J.; Strong, A.E.; Eakin, C.M.; Christensen, T.R.L.; et al. Remote sensing of coral reef for monitoring and management: A review. Remote Sens. 2016, 8, 118. [Google Scholar] [CrossRef]
- Zapata-Ramírez, P.A.; Scaradozzi, D.; Sorbi, L.; Palma, M.; Pantaleo, U.; Ponti, M.; Cerrano, C. Innovative study methods for the Mediterranean coralligenous habitats. Adv. Oceanogr. Limnol. 2013, 4, 102–119. [Google Scholar] [CrossRef]
- Zapata-Ramírez, P.A.; Huete-Stauffer, C.; Scaradozzi, D.; Marconi, M.; Cerrano, C. Testing methods to support managenment decisions in coralligenous and cave enviroments. A case study at Porfino MPA. Mar. Environ. Res. 2016, 118, 45–56. [Google Scholar] [CrossRef] [PubMed]
- Lam, K.; Shin, P.K.S.; Bradbeer, R.; Randall, D.; Ku, K.K.K.; Hodgson, P.; Cheung, S.G. A comparison of video ans point intercept transect methods for monitoring subtropical coral communities. J. Exp. Mar. Biol. Ecol. 2006, 333, 115–128. [Google Scholar] [CrossRef]
- McManus, J.W.; Polsenberg, J.F. Coral-algal phase shifts on coral reefs: Ecological and environmental aspects. Prog. Oceanogr. 2004, 60, 263–279. [Google Scholar] [CrossRef]
- Hernández-Landa, R.C.; Acosta-González, G.; Núñez-Lara, E.; Arias-González, J.E. Spatial distribution of surgeonfish and parrotfish in the north sector of the Mesoamerican Barrier Reef System. Mar. Ecol. 2014, 36, 432–446. [Google Scholar] [CrossRef]
- Mumby, P.J. The impact of exploiting grazers (Scaridae) on the dynamics of Caribbean coral reefs. Ecol. Appl. 2006, 16, 747–769. [Google Scholar] [CrossRef]
- Taberlet, P.; Coissac, E.; Hajibabaei, M.; Rieseberg, L.H. Environmental DNA. Mol. Ecol. 2012, 21, 1789–1793. [Google Scholar] [CrossRef]
- Valentini, A.; Taberlet, P.; Miaud, C.; Civade, R.; Herder, J.; Thomsen, P.F.; Bellemain, E.; Besnard, A.; Coissac, E.; Boyer, F.; et al. Next-generation monitoring of aquatic biodiversity using environmental DNA metabarcoding. Mol. Ecol. 2016, 25, 929–942. [Google Scholar] [CrossRef]
- Brandl, S.J.; Goatley, C.H.R.; Bellwood, D.R.; Tornabene, L. The hidden half: Ecology and evolution of cryptobenthic fishes on coral reefs. Biol. Rev. 2018, 93, 1846–1873. [Google Scholar] [CrossRef]
- Helgoe, J.; Davy, S.K.; Weis, V.M.; Rodriguez-Lanetty, M. Triggers, cascades, and endpoints: Connecting the dots of coral bleaching mechanisms. Biol. Rev. Camb. Philos. Soc. 2024, 99, 715–752. [Google Scholar] [CrossRef] [PubMed]
- Lesser, M.P. Coral Bleaching: Causes and Mechanisms. In Coral Reefs: An Ecosystem in Transition; Dubinsky, Z., Stambler, N., Eds.; Springer: Dordrecht, The Netherlands, 2011; pp. 405–419. [Google Scholar]
- Gómez-Campo, K.; Enríquez, S.; Iglesias-Prieto, R. A Road Map for the Development of the Bleached Coral Phenotype. Front. Mar. Sci. 2022, 9, 806491. [Google Scholar] [CrossRef]
- Nielsen, D.A.; Petrou, K.; Gates, R.D. Coral bleaching from a single cell perspective. ISME J. 2018, 12, 1558–1567. [Google Scholar] [CrossRef]
- Tauffenberger, A.; Magistretti, P.J. Reactive Oxygen Species: Beyond Their Reactive Behavior. Neurochem. Res. 2021, 46, 77–87. [Google Scholar] [CrossRef] [PubMed]
- Sies, H.; Belousov, V.V.; Chandel, N.S.; Davies, M.J.; Jones, D.P.; Mann, G.E.; Murphy, M.P.; Yamamoto, M.; Winterbourn, C. Defining roles of specific reactive oxygen species (ROS) in cell biology and physiology. Nat. Rev. Mol. Cell Biol. 2022, 23, 499–515. [Google Scholar] [CrossRef] [PubMed]
- Averill-Bates, D. Reactive oxygen species and cell signaling. Review. Biochim. Biophys. Acta Mol. Cell Res. 2024, 1871, 119573. [Google Scholar] [CrossRef]
- Szabó, M.; Larkum, A.W.D.; Vass, I. A Review: The Role of Reactive Oxygen Species in Mass Coral Bleaching. In Photosynthesis in Algae: Biochemical and Physiological Mechanisms; Larkum, A.W.D., Grossman, A.R., Raven, J.A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 459–488. [Google Scholar]
- Bouchard, J.N.; Yamasaki, H. Heat stress stimulates nitric oxide production in Symbiodinium microadriaticum: A possible linkage between nitric oxide and the coral bleaching phenomenon. Plant Cell Physiol. 2008, 49, 641–652. [Google Scholar] [CrossRef] [PubMed]
- Trapido-Rosenthal, H.; Zielke, S.; Owen, R.; Buxton, L.; Boeing, B.; Bhagooli, R.; Archer, J. Increased zooxanthellae nitric oxide synthase activity is associated with coral bleaching. Biol. Bull. 2005, 208, 3–6. [Google Scholar] [CrossRef]
- Safavi-Hemami, H.; Young, N.D.; Doyle, J.; Llewellyn, L.; Klueter, A. Characterisation of nitric oxide synthase in three cnidarian-dinoflagellate symbioses. PLoS ONE 2010, 5, e10379. [Google Scholar] [CrossRef] [PubMed]
- Hawkins, T.D.; Davy, S.K. Nitric oxide production and tolerance differ among Symbiodinium types exposed to heat stress. Plant Cell Physiol. 2012, 53, 1889–1898. [Google Scholar] [CrossRef] [PubMed]
- Jury, C.P.; Boeing, B.M.; Trapido-Rosenthal, H.; Gates, R.D.; Toonen, R.J. Nitric oxide production rather than oxidative stress and cell death is associated with the onset of coral bleaching in Pocillopora acuta. PeerJ 2022, 10, e13321. [Google Scholar] [CrossRef] [PubMed]
- Coles, S.L.; Brown, B.E. Coral bleaching–capacity for acclimatization and adaptation. Adv. Mar. Biol. 2003, 46, 183–223. [Google Scholar] [CrossRef]
- Balchin, D.; Hayer-Hartl, M.; Hartl, F.U. In vivo aspects of protein folding and quality control. Science 2016, 353, aac4354. [Google Scholar] [CrossRef] [PubMed]
- Junprung, W.; Supungul, P.; Tassanakajon, A. Structure, gene expression, and putative functions of crustacean heat shock proteins in innate immunity. Dev. Comp. Immunol. 2021, 115, 103875. [Google Scholar] [CrossRef]
- Jeyachandran, S.; Chellapandian, H.; Park, K.; Kwak, I.S. A Review on the Involvement of Heat Shock Proteins (Extrinsic Chaperones) in Response to Stress Conditions in Aquatic Organisms. Antioxidants 2023, 12, 1444. [Google Scholar] [CrossRef]
- Seveso, D.; Arrigoni, R.; Montano, S.; Maggioni, D.; Orlandi, I.; Berumen, M.L.; Galli, P.; Vai, M. Investigating the heat shock protein response involved in coral bleaching across scleractinian species in the central Red Sea. Coral Reefs 2020, 39, 85–98. [Google Scholar] [CrossRef]
- Rosic, N.N.; Pernice, M.; Dove, S.; Dunn, S.; Hoegh-Guldberg, O. Gene expression profiles of cytosolic heat shock proteins Hsp70 and Hsp90 from symbiotic dinoflagellates in response to thermal stress: Possible implications for coral bleaching. Cell Stress Chaperones 2011, 16, 69–80. [Google Scholar] [CrossRef] [PubMed]
- Traylor-Knowles, N.; Baker, A.C.; Beavers, K.M.; Garg, N.; Guyon, J.R.; Hawthorn, A.; MacKnight, N.J.; Medina, M.; Mydlarz, L.D.; Peters, E.C.; et al. Advances in coral immunity ‘omics in response to disease outbreaks. Front. Mar. Sci. 2022, 9, 952199. [Google Scholar] [CrossRef]
- Marangoni, L.F.d.B.; Dalmolin, C.; Marques, J.A.; Klein, R.D.; Abrantes, D.P.; Pereira, C.M.; Calderon, E.N.; Castro, C.B.E.; Bianchini, A. Oxidative stress biomarkers as potential tools in reef degradation monitoring: A study case in a South Atlantic reef under influence of the 2015–2016 El Niño/Southern Oscillation (ENSO). Ecol. Indic. 2019, 106, 105533. [Google Scholar] [CrossRef]
- Parson, M.; Bratanov, D.; Gaston, K.J.; González, F. UAVs, hyperspectral remote sensing, and machine learning revolutionizing reef monitoring. Sensor 2018, 18, 2026. [Google Scholar] [CrossRef] [PubMed]
- Raber, G.T.; Schill, S.R. Reef Rover: A Low-Cost Small Autonomous Unmanned Surface Vehicle (USV) for Mapping and Monitoring Coral Reefs. Drones 2019, 3, 38. [Google Scholar] [CrossRef]
- Nalmpanti, M.; Chrysafi, A.; Meeuwig, J.J.; Tsikliras, A.C. Monitoring marine fishes using underwater video techniques in the Mediterranean Sea. Rev. Fish Biol. Fish. 2023, 33, 1291–1310. [Google Scholar] [CrossRef]
- Williams, S.B.; Pizarro, O.R.; Jakuba, M.V.; Johnson, C.R.; Barrett, N.S.; Babcock, R.C.; Kendrick, G.A.; Steinberg, P.D.; Heyward, A.J.; Doherty, P.J.; et al. Monitoring of Benthic Reference Sites: Using an Autonomous Underwater Vehicle. IEEE Robot. Autom. Mag. 2012, 19, 73–84. [Google Scholar] [CrossRef]
- Cabioch, G.; Davies, P.; Done, T.; Gischler, E.; Macintyre, I.G.; Wood, R.; Woodroffe, C. Encyclopedia of Modern Coral Reefs: Structure, Form and Process; Springer: Dordrecht, The Netherlands, 2010. [Google Scholar]
- Yasir Haya, L.O.M.; Fujii, M. Mapping the change of coral reefs using remote sensing and in situ measurements: A case study in Pangkajene and Kepulauan Regency, Spermonde Archipelago, Indonesia. J. Oceanogr. 2017, 73, 623–645. [Google Scholar] [CrossRef]
- Bakker, A.C.; Gleason, A.C.R.; Dempsey, A.C.; Fox, H.E.; Green, R.H.; Purkis, S.J. Remotely sensed habitat diversity predicts species diversity on coral reefs. Remote Sens. Environ. 2024, 302, 113990. [Google Scholar] [CrossRef]
- Hafizt, M.; Adi, N.; Munawaroh, M.; Wouthuyzen, S.; Adji, A. Coral Reef Health Index Calculation from Remote Sensing Data: A Review. Int. J. Conserv. Sci. 2023, 14, 247–264. [Google Scholar] [CrossRef]
- Yamano, H.; Tamura, M. Detection limits of coral reef bleaching by satellite remote sensing: Simulation and data analysis. Remote Sens. Environ. 2004, 90, 86–103. [Google Scholar] [CrossRef]
- Kennedy, E.V.; Roelfsema, C.M.; Lyons, M.B.; Kovacs, E.M.; Borrego-Acevedo, R.; Roe, M.; Phinn, S.R.; Larsen, K.; Murray, N.J.; Yuwono, D.; et al. Reef Cover, a coral reef classification for global habitat mapping from remote sensing. Sci. Data 2021, 8, 196. [Google Scholar] [CrossRef]
- Barve, S.; Webster, J.M.; Chandra, R. Reef-Insight: A Framework for Reef Habitat Mapping with Clustering Methods Using Remote Sensing. Information 2023, 14, 373. [Google Scholar] [CrossRef]
- Araujo, J.C.; Seoane, J.C.S.; Lima, G.V.; da Silva, E.G.; França, L.G.; de Souza Santos, E.E.; de Oliveira, I.M.; Pereira, P.H.C. High-resolution optical remote sensing geomorphological mapping of coral reef: Supporting conservation and management of marine protected áreas. J. Sea Res. 2023, 196, 102453. [Google Scholar] [CrossRef]
- Williamson, M.J.; Tebbs, E.J.; Dawson, T.P.; Thompson, H.J.; Head, C.E.I.; Jacoby, D.M.P. Monitoring shallow coral reef exposure to environmental stressors using satellite earth observation: The reef environmental stress exposure toolbox (RESET). Remote Sens. Ecol. Conserv. 2022, 8, 855–874. [Google Scholar] [CrossRef]
- Neo, V.H.F.; Zinke, J.; Fung, T.; Merchant, C.J.; Zawada, K.J.A.; Krawczyk, H.; Maina, J.M. Inconsistent Coral Bleaching Risk Indicators Between Temperature Data Sources. Earth Space Sci. 2023, 10, e2022EA002688. [Google Scholar] [CrossRef]
- Little, C.M.; Liu, G.; De La Cour, J.L.; Eakin, C.M.; Manzello, D.; Heron, S.F. Global coral bleaching event detection from satellite monitoring of extreme heat stress. Front. Mar. Sci. 2022, 9, 883271. [Google Scholar] [CrossRef]
- Carlson, R.R.; Li, J.; Crowder, L.B.; Asner, G.P. Large-scale effects of turbidity on coral bleaching in the Hawaiian islands. Front. Mar. Sci. 2022, 9, 969472. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV remote sensing applications in marine monitoring: Knowledge visualization and review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef] [PubMed]
- Qin, J.; Li, M.; Zhao, J.; Li, D.; Zhang, H.; Zhong, J. Advancing sun glint correction in high-resolution marine UAV RGB imagery for coral reef monitoring. ISPRS J. Photogramm. Remote Sens. 2024, 207, 298–311. [Google Scholar] [CrossRef]
- Chong, W.S.; Zaki, N.H.M.; Hossain, M.S.; Muslim, A.M.; Pour, A.B. Introducing Theil-Sen estimator for sun glint correction of UAV data for coral mapping. Geocarto Int. 2022, 37, 4527–4556. [Google Scholar] [CrossRef]
- Hoffmann, T.K.; Pfennings, K.; Hitzegrad, J.; Brohmann, L.; Welzel, M.; Paul, M.; Goseberg, N.; Wehrmann, A.; Schlurmann, T. Low-cost UAV monitoring: Insights into seasonal volumetric changes of an oyster reef in the German Wadden Sea. Front. Mar. Sci. 2023, 10, 1245926. [Google Scholar] [CrossRef]
- Mohamad, M.N.; Reba, M.N.M.; Hossain, M.S. A screening approach for the correction of distortion in UAV data for coral community mapping. Geocarto Int. 2022, 37, 7089–7121. [Google Scholar] [CrossRef]
- Casella, E.; Lewin, P.; Ghilardi, M.; Rovere, A.; Bejarano, S. Assessing the relative accuracy of coral heights reconstructed from drones and structure from motion photogrammetry on coral reefs. Coral Reefs 2022, 41, 869–875. [Google Scholar] [CrossRef]
- Casella, E.; Collin, A.; Harris, D.; Ferse, S.; Bejarano, S.; Parravicini, V.; Hench, J.L.; Rovere, A. Mapping coral reefs using consumer-grade drones and structure from motion photogrammetry techniques. Coral Reefs 2017, 36, 269–275. [Google Scholar] [CrossRef]
- Ridge, J.T.; DiGiacomo, A.E.; Rodriguez, A.B.; Himmelstein, J.D.; Johnston, D.W. Comparison of 3D structural metrics on oyster reefs using unoccupied aircraft photogrammetry and terrestrial LiDAR across a tidal elevation gradient. Remote Sens. Ecol. Conserv. 2023, 9, 501–511. [Google Scholar] [CrossRef]
- Manessa, M.; Handoko, D.; Pamungkas, F.; Putera, R.; Sutarko, D.; Yogiswara, A.; Mukhtar, M.; Supriatna, S. Preliminary Result of Drone UAV Derived Multispectral Bathymetry in Coral Reef Ecosystem: A Case Study of Pemuteran Beach. Int. J. Adv. Sci. Eng. Inf. Technol. 2022, 12, 1512. [Google Scholar] [CrossRef]
- Diruit, W.; Le Bris, A.; Bajjouk, T.; Richier, S.; Helias, M.; Burel, T.; Lennon, M.; Guyot, A.; Ar Gall, E. Seaweed Habitats on the Shore: Characterization through Hyperspectral UAV Imagery and Field Sampling. Remote Sens. 2022, 14, 3124. [Google Scholar] [CrossRef]
- Román, A.; Prasyad, H.; Oiry, S.; Davies, B.F.R.; Brunier, G.; Barillé, L. Mapping intertidal oyster farms using unmanned aerial vehicles (UAV) high-resolution multispectral data. Estuar. Coast. Shelf Sci. 2023, 291, 108432. [Google Scholar] [CrossRef]
- Young, G.C.; Dey, S.; Rogers, A.D.; Exton, D. Cost and time-effective method for multi-scale measures of rugosity, fractal dimension, and vector dispersion from coral reef 3D models. PLoS ONE 2017, 12, e0175341. [Google Scholar] [CrossRef] [PubMed]
- Rossi, P.; Castagnetti, C.; Capra, A.; Brooks, A.J.; Mancini, F. Detecting change in coral reef 3D structure using underwater photogrammetry: Critical issues and performance metrics. Appl. Geomat. 2020, 12, 3–17. [Google Scholar] [CrossRef]
- Robert, K.; Huvenne, V.A.I.; Georgiopoulou, A.; Jones, D.O.B.; Marsh, L.; Carter, G.D.O.; Chaumillon, L. New approaches to high-resolution mapping of marine vertical structures. Sci. Rep. 2017, 7, 9005. [Google Scholar] [CrossRef] [PubMed]
- Swanborn, D.J.B.; Stefanoudis, P.V.; Huvenne, V.A.I.; Pittman, S.J.; Woodall, L.C. Structure-from-motion photogrammetry demonstrates that fine-scale seascape heterogeneity is essential in shaping mesophotic fish assemblages. Remote Sens. Ecol. Conserv. 2022, 8, 904–920. [Google Scholar] [CrossRef]
- Goodman, J.; Purkis, S.; Phinn, S. Coral Reef Remote Sensing: A Guide for Mapping, Monitoring and Management; Springer: Dordrecht, The Netherland, 2013. [Google Scholar]
- Apprill, A.; Girdhar, Y.; Mooney, T.A.; Hansel, C.M.; Long, M.H.; Liu, Y.; Zhang, W.G.; Kapit, J.; Hughen, K.; Coogan, J.; et al. Toward a New Era of Coral Reef Monitoring. Environ. Sci. Technol. 2023, 57, 5117–5124. [Google Scholar] [CrossRef]
- Marsh, L.; Copley, J.T.; Huvenne, V.A.I.; Tyler, P.A.; the Isis ROV Facility. Getting the bigger picture: Using precision Remotely Operated Vehicle (ROV) videography to acquire high-definition mosaic images of newly discovered hydrothermal vents in the Southern Ocean. Deep Sea Res. Part II Top. Stud. Oceanogr. 2013, 92, 124–135. [Google Scholar] [CrossRef]
- Garg, P.K. Remote Sensing Theory and Application; Mercury Learning and Information: Boston, MA, USA, 2024; pp. 326–332. ISBN 978-1-68392-748-8. [Google Scholar]
- Kim, T.W.; Yuh, J. A novel neuro-fuzzy controller for autonomous underwater vehicles. In Proceedings of the 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No.01CH37164), Seoul, Republic of Korea, 21–26 May 2001; Volume 2353, pp. 2350–2355. [Google Scholar]
- Lee, C.S.G.; Wang, J.-S.; Yuh, J. Self-adaptive neuro-fuzzy systems for autonomous underwater vehicle control. Adv. Robot. 2001, 15, 589–608. [Google Scholar] [CrossRef]
- Shojaei, K. Three-dimensional neural network tracking control of a moving target by underactuated autonomous underwater vehicles. Neural Comput. Appl. 2019, 31, 509–521. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, S.; Shi, L.; Pan, S.; He, Y. The application of PID control in motion control of the spherical amphibious robot. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1901–1906. [Google Scholar]
- Healey, A.J. A neural network approach to failure diagnostics for underwater vehicles. In Proceedings of the 1992 Symposium on Autonomous Underwater Vehicle Technology, Washington, DC, USA, 2–3 June 1992; pp. 131–134. [Google Scholar]
- Song, S.; Liu, J.; Guo, J.; Wang, J.; Xie, Y.; Cui, J.H. Neural-Network-Based AUV Navigation for Fast-Changing Environments. IEEE Internet Things J. 2020, 7, 9773–9783. [Google Scholar] [CrossRef]
- Li, J.H.; Lee, P.M. A neural network adaptive controller design for free-pitch-angle diving behavior of an autonomous underwater vehicle. Robot. Auton. Syst. 2005, 52, 132–147. [Google Scholar] [CrossRef]
- Shaukat, N.; Ali, A.; Javed Iqbal, M.; Moinuddin, M.; Otero, P. Multi-Sensor Fusion for Underwater Vehicle Localization by Augmentation of RBF Neural Network and Error-State Kalman Filter. Sensors 2021, 21, 1149. [Google Scholar] [CrossRef] [PubMed]
- Zhang, B.; Ji, D.; Liu, S.; Zhu, X.; Xu, W. Autonomous Underwater Vehicle navigation: A review. Ocean Eng. 2023, 273, 113861. [Google Scholar] [CrossRef]
- Gafurov, S.A.; Klochkov, E.V. Autonomous Unmanned Underwater Vehicles Development Tendencies. Procedia Eng. 2015, 106, 141–148. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Feng, S.-N.; Lai, C.-Y.; Tseng, H.-T.; Huang, C.-W. Applying deep learning to predict SST variation and tropical cyclone patterns that influence coral bleaching. Ecol. Inform. 2023, 77, 102261. [Google Scholar] [CrossRef]
- Giles, A.B.; Ren, K.; Davies, J.E.; Abrego, D.; Kelaher, B. Combining Drones and Deep Learning to Automate Coral Reef Assessment with RGB Imagery. Remote Sens. 2023, 15, 2238. [Google Scholar] [CrossRef]
- Boonnam, N.; Udomchaipitak, T.; Puttinaovarat, S.; Chaichana, T.; Boonjing, V.; Muangprathub, J. Coral Reef Bleaching under Climate Change: Prediction Modeling and Machine Learning. Sustainability 2022, 14, 6161. [Google Scholar] [CrossRef]
- Zhang, H.; Gruen, A.; Li, M. Deep Learning for Semantic Segmentation of Coral Images in Underwater Photogrammetry. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 2, 343–350. [Google Scholar] [CrossRef]
- Mayfield, A.; Lin, C. Leveraging the power of artificial intelligence to identify resilient reef coral genotypes for cryopreservation. Platax 2022, 19, 43–58. [Google Scholar]
- Mahmood, A.; Bennamoun, M.; An, S.; Sohel, F.; Boussaid, F.; Hovey, R.; Kendrick, G.; Fisher, R.B. Chapter 21—Deep Learning for Coral Classification. In Handbook of Neural Computation; Samui, P., Sekhar, S., Balas, V.E., Eds.; Academic Press: Cambridge, MA, USA, 2017; pp. 383–401. [Google Scholar]
- Kopecky, K.L.; Pavoni, G.; Nocerino, E.; Brooks, A.J.; Corsini, M.; Menna, F.; Gallagher, J.P.; Capra, A.; Castagnetti, C.; Rossi, P.; et al. Quantifying the Loss of Coral from a Bleaching Event Using Underwater Photogrammetry and AI-Assisted Image Segmentation. Remote Sens. 2023, 15, 4077. [Google Scholar] [CrossRef]
- Beijbom, O.; Edmunds, P.J.; Kline, D.I.; Mitchell, B.G.; Kriegman, D. Automated annotation of coral reef survey images. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; pp. 1170–1177. [Google Scholar]
- Chen, Q.; Beijbom, O.; Chan, S.; Bouwmeester, J.; Kriegman, D. A New Deep Learning Engine for CoralNet. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, BC, Canada, 11–17 October 2021; pp. 3686–3695. [Google Scholar]
- Song, H.; Mehdi, S.R.; Zhang, Y.; Shentu, Y.; Wan, Q.; Wang, W.; Raza, K.; Huang, H. Development of Coral Investigation System Based on Semantic Segmentation of Single-Channel Images. Sensors 2021, 21, 1848. [Google Scholar] [CrossRef]
- CORALNET A Web Solution for Coral Reef Analysis. Available online: Https://coralnet.ucsd.edu (accessed on 29 July 2024).
- ReefCloud. Available online: Https://reefcloud.ai (accessed on 29 July 2024).
- TagLab. Available online: Https://taglab.isti.cnr.it (accessed on 29 July 2024).
- Modasshir, M.; Rahman, S.; Youngquist, O.; Rekleitis, I. Coral Identification and Counting with an Autonomous Underwater Vehicle. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 524–529. [Google Scholar]
- de Oliveira, L.M.C.; Lim, A.; Conti, L.A.; Wheeler, A.J. High-resolution 3D mapping of cold-water coral reefs using machine learning. Front. Environ. Sci. 2022, 10, 1044706. [Google Scholar] [CrossRef]
- Davis, A.; Paneerselvam, S. Design and Development of AUV for Coral Reef Inspection and Geotagging Using CV/ML. In Innovations in Data Analytics; Springer: Singapore, 2023; pp. 595–610. [Google Scholar]
- Antonelli, G.; Fossen, T.; Yoerger, D. Underwater Robotics. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; Volume 1, pp. 987–1008. [Google Scholar]
- Petillot, Y.R.; Antonelli, G.; Casalino, G.; Ferreira, F. Underwater Robots: From Remotely Operated Vehicles to Intervention-Autonomous Underwater Vehicles. IEEE Robot. Autom. Mag. 2019, 26, 94–101. [Google Scholar] [CrossRef]
- Zhou, J.; Huang, H.; Huang, S.H.; Si, Y.; Shi, K.; Quan, X.; Guo, C.; Chen, C.-W.; Wang, Z.; Wang, Y.; et al. AUH, a New Technology for Ocean Exploration. Engineering 2023, 25, 21–27. [Google Scholar] [CrossRef]
- Yuh, J.; Marani, G.; Blidberg, D.R. Applications of marine robotic vehicles. Intell. Serv. Robot. 2011, 4, 221–231. [Google Scholar] [CrossRef]
- Antonelli, G. Underwater Robots, 3rd ed.; STAR (Springer Tracts in Advance Robotics); Springer: Berlin, Germany, 2014; ISBN 978-3-319-02876-7. [Google Scholar]
- Huvenne, V.A.I.; Robert, K.; Marsh, L.; Lo Iacono, C.; Le Bas, T.; Wynn, R.B. ROVs and AUVs. In Submarine Geomorphology; Micallef, A., Krastel, S., Savini, A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 93–108. [Google Scholar]
- Ura, T. Development Timeline of the Autonomous Underwater Vehicle in Japan. J. Robot. Mechatron. 2020, 32, 713–721. [Google Scholar] [CrossRef]
- Manjakkal, L.; Mitra, S.; Petillot, Y.R.; Shutler, J.; Scott, E.M.; Willander, M.; Dahiya, R. Connected Sensors, Innovative Sensor Deployment, and Intelligent Data Analysis for Online Water Quality Monitoring. IEEE Internet Things J. 2021, 8, 13805–13824. [Google Scholar] [CrossRef]
- Vallegra, F.; Mateo, D.; Tokić, G.; Bouffanais, R.; Yue, D.K.P. Gradual Collective Upgrade of a Swarm of Autonomous Buoys for Dynamic Ocean Monitoring. In Proceedings of the OCEANS 2018 MTS/IEEE Charleston, Charleston, SC, USA, 22–25 October 2018; pp. 1–7. [Google Scholar]
- Zoss, B.; Mateo, D.; Kuan, Y.K.; Tokić, G.; Chamanbaz, M.; Goh, L.; Vallegra, F.; Bouffanais, R.; Yue, D. Distributed system of autonomous buoys for scalable deployment and monitoring of large waterbodies. Auton. Robot. 2018, 42, 1669–1689. [Google Scholar] [CrossRef]
- Albaladejo, C.; Soto, F.; Torres, R.; Sánchez, P.; López, J.A. A Low-Cost Sensor Buoy System for Monitoring Shallow Marine Environments. Sensors 2012, 12, 9613–9634. [Google Scholar] [CrossRef] [PubMed]
- Pirisi, A.; Grimaccia, F.; Mussetta, M.; Zich, R.E.; Johnstone, R.; Palaniswami, M.; Rajasegarar, S. Optimization of an energy harvesting buoy for coral reef monitoring. In Proceedings of the 2013 IEEE Congress on Evolutionary Computation, Cancun, Mexico, 20–23 June 2013; pp. 629–634. [Google Scholar]
- Sergiy, F.; Dmitry, B.G.; Chad, L. Autonomous buoy platform for low-cost visual maritime surveillance: Design and initial deployment. In Proc. SPIE 7317, Ocean Sensing and Monitoring; SPIE: Bellingham, WA USA, 2009; p. 73170A. [Google Scholar]
- Vesecky, J.F.; Laws, K.; Petersen, S.I.; Bazeghi, C.; Wiberg, D. Prototype autonomous mini-buoy for use in a wireless networked, ocean surface sensor array. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 4987–4990. [Google Scholar]
- Derevnin, V.A.; Morozov, A.K.; Stepin, V.A. Oceanology controlled buoyancy autonomous buoys. In Proceedings of the IEEE Oceanic Engineering Society. OCEANS’98. Conference Proceedings (Cat. No.98CH36259), Nice, France, 28 September–1 October 1998; Volume 1813, pp. 1812–1816. [Google Scholar]
- Jiang, B.; Xu, Z.; Yang, S.; Chen, Y.; Ren, Q. Profile Autonomous Underwater Vehicle System for Offshore Surveys. Sensors 2023, 23, 3722. [Google Scholar] [CrossRef]
- Fossen, T. Marine Control Systems: Guidance, Navigation, and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]
- Md Naiem, M.A.; Adnan, F.; Md zain, M.Z. Review of Course Keeping Control System for Unmanned Surface Vehicle. J. Teknol. 2015, 74, 11–20. [Google Scholar] [CrossRef]
- Humphries, F.; Horne, R.; Olsen, M.; Dunbabin, M.; Tranter, K. Uncrewed autonomous marine vessels test the limits of maritime safety frameworks. WMU J. Marit. Aff. 2022, 22, 317–344. [Google Scholar] [CrossRef]
- Bolbot, V.; Sandru, A.; Saarniniemi, T.; Puolakka, O.; Kujala, P.; Valdez Banda, O.A. Small Unmanned Surface Vessels—A Review and Critical Analysis of Relations to Safety and Safety Assurance of Larger Autonomous Ships. J. Mar. Sci. Eng. 2023, 11, 2387. [Google Scholar] [CrossRef]
- Manley, J.E. Unmanned surface vehicles, 15 years of development. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–4. [Google Scholar]
- Siramdasu, Y.; Fahimi, F. Test of a Sliding Mode Controller for Trajectory Tracking of an Underactuated Surface Vessel. In Proceedings of the ASME International Mechanical Engineering Congress & Exposition 2011, Denver, CO, USA, 11–17 November 2011; Volume 7. [Google Scholar]
- Siramdasu, Y.; Fahimi, F. Nonlinear dynamic model identification methodology for real robotic surface vessels. Int. J. Control 2013, 86, 2315–2324. [Google Scholar] [CrossRef]
- Kale, S. Developments in Unmanned Surface Vehicles (USVs): A Review. Int. Conf. Appl. Eng. Nat. Sci. 2023, 1, 596–600. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Almeida, J.; Bayat, M.; Cardeira, B.; Cunha, R.; Häusler, A.; Maurya, P.; Oliveira, A.; Pascoal, A.; Pereira, A.; et al. Cooperative Control of Multiple Marine Vehicles Theoretical Challenges and Practical Issues. IFAC Proc. Vol. 2009, 42, 412–417. [Google Scholar] [CrossRef]
- Soares, J.M.; Aguiar, A.P.; Pascoal, A.M.; Martinoli, A. Joint ASV/AUV range-based formation control: Theory and experimental results. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5579–5585. [Google Scholar]
- Wang, X.; Shang, J.; Luo, Z.; Tang, L.; Zhang, X.; Li, J. Reviews of power systems and environmental energy conversion for unmanned underwater vehicles. Renew. Sustain. Energy Rev. 2012, 16, 1958–1970. [Google Scholar] [CrossRef]
- Capocci, R.; Dooly, G.; Omerdić, E.; Coleman, J.; Newe, T.; Toal, D. Inspection-Class Remotely Operated Vehicles—A Review. J. Mar. Sci. Eng. 2017, 5, 13. [Google Scholar] [CrossRef]
- McLean, D.L.; Parsons, M.J.G.; Gates, A.R.; Benfield, M.C.; Bond, T.; Booth, D.J.; Bunce, M.; Fowler, A.M.; Harvey, E.S.; Macreadie, P.I.; et al. Enhancing the Scientific Value of Industry Remotely Operated Vehicles (ROVs) in Our Oceans. Front. Mar. Sci. 2020, 7, 220. [Google Scholar] [CrossRef]
- Fossen, T. Guidance and Control of Ocean Vehicles; John Wiley & Sons: New York, NY, USA, 1999. [Google Scholar]
- González-García, J.; Gómez-Espinosa, A.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cuan-Urquizo, E.; Cabello, J.A. Model-Free High-Order Sliding Mode Controller for Station-Keeping of an Autonomous Underwater Vehicle in Manipulation Task: Simulations and Experimental Validation. Sensors 2022, 22, 4347. [Google Scholar] [CrossRef] [PubMed]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A. Adaptive disturbance observer for trajectory tracking control of underwater vehicles. Ocean Eng. 2020, 200, 107080. [Google Scholar] [CrossRef]
- Clark, C.; Olstad, C.; Buhagiar, K.; Gambin, T. Archaeology via Underwater Robots: Mapping and Localization within Maltese Cistern Systems. In Proceedings of the 10 th International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008. [Google Scholar]
- Ferrera, M.; Moras, J.; Trouvé-Peloux, P.; Creuze, V.; Dégez, D. The Aqualoc Dataset: Towards Real-Time Underwater Localization from a Visual-Inertial-Pressure Acquisition System. In Proceedings of the IROS 2018 Workshop, Madrid, Spain, 5 October 2018. [Google Scholar]
- Kwasnitschka, T.; Hansteen, T.H.; Devey, C.W.; Kutterolf, S. Doing fieldwork on the seafloor: Photogrammetric techniques to yield 3D visual models from ROV video. Comput. Geosci. 2013, 52, 218–226. [Google Scholar] [CrossRef]
- Teague, J.; Scott, T. Underwater Photogrammetry and 3D reconstruction of Submerged Objects in Shallow Environments by ROV and Underwater GPS. J. Mar. Sci. Res. Technol. 2017, 1, 005. [Google Scholar]
- Goldstein, A.; Bentley, S. Use of highly portable micro-sized remotely operated vehicles for environmental monitoring and mapping. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–6. [Google Scholar]
- Aras, M.; Zainal, I.; Abdullah, S.S.B.; Kassim, A.M.; Jaafar, H.I. Development of an Unmanned Underwater Remotely Operated Crawler (ROC) For Monitoring Application. J. Mech. Eng. Technol. 2015, 7, 41–55. [Google Scholar]
- Mohd Aras, M.S.; Kamarudin, M.N.; Zainal, I.; Rusli, M. Small Scale Unmanned Underwater Remotely Operated Crawler (ROC). TELKOMNIKA Indones. J. Electr. Eng. 2016, 3, 481–488. [Google Scholar] [CrossRef]
- Shim, H.; Yoo, S.-Y.; Kang, H.; Jun, B.-H. Development of arm and leg for seabed walking robot CRABSTER200. Ocean Eng. 2016, 116, 55–67. [Google Scholar] [CrossRef]
- Aripin, M.K.; Aras, M.S.M.; Sulaiman, M.; Zainal, M.I.M.; Harun, M.H.; Zambri, M.K.M. Low cost expansion of unmanned underwater remotely operated crawler (ROC) for pipeline inspection. In Proceedings of the 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications (USYS), Kuala Lumpur, Malaysia, 18–20 December 2017; pp. 1–5. [Google Scholar]
- Wood, S.; Harris, W.; Ismail, T.; Malone, J.M.; Nanney, M.; Ojeda, J.; Pugatch, B.; Vandedrinck, S. Hybrid robot crawler / flyer for use in underwater archaeology. In Proceedings of the 2013 OCEANS—San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–11. [Google Scholar]
- Falahzadeh, A.; Toma, D.M.; Francescangeli, M.; Chatzievangelou, D.; Nogueras, M.; Martínez, E.; Carandell, M.; Tangerlini, M.; Thomsen, L.; Picardi, G.; et al. A New Coastal Crawler Prototype to Expand the Ecological Monitoring Radius of OBSEA Cabled Observatory. J. Mar. Sci. Eng. 2023, 11, 857. [Google Scholar] [CrossRef]
- Thomsen, L. Temporal and spatial benthic data collection via mobile robots: Present and future applications. In Proceedings of the OCEANS 2015—Genova, Genova, Italy, 18–21 May 2015. [Google Scholar] [CrossRef]
- Dudek, G.; Giguère, P.; Prahacs, C.; Saunderson, S.; Sattar, J.; Torres-Méndez, L.A.; Jenkin, M.; German, A.; Hogue, A.; Ripsman, A.; et al. AQUA: An amphibious autonomous robot. Computer 2007, 40, 46–53. [Google Scholar] [CrossRef]
- Sahoo, A.; Dwivedy, S.K.; Robi, P.S. Advancements in the field of autonomous underwater vehicle. Ocean Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Antonelli, G.; Chiaverini, S.; Sarkar, N.; West, M. Adaptive control of an autonomous underwater vehicle: Experimental results on ODIN. IEEE Trans. Control Syst. Technol. 2001, 9, 756–765. [Google Scholar] [CrossRef]
- Palomeras, N.; El-Fakdi, A.; Carreras, M.; Ridao, P. COLA2: A control architecture for AUVs. IEEE J. Ocean. Eng. 2012, 37, 695–716. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. Planning Coverage Paths on Bathymetric Maps for In-Detail Inspection of the Ocean Floor. In Proceedings of the IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Carreras, M.; Hernández, J.D.; Vidal, E.; Palomeras, N.; Ribas, D.; Ridao, P. Sparus II AUV—A Hovering Vehicle for Seabed Inspection. IEEE J. Ocean. Eng. 2018, 43, 344–355. [Google Scholar] [CrossRef]
- Rong, H.; Guan, L.; Gao, Y. Design and Experiment of an Autonomous Underwater Vehicle for Twilight Zone Surveying. In Proceedings of the 2019 International Conference on Communications, Signal Processing, and Their Applications (ICCSPA), Sharjah, United Arab Emirates, 19–21 March 2019; pp. 1–6. [Google Scholar]
- Natu, A.; Garg, V.; Gaur, P.; Dhruv; Raj, P.A.C.; Sain, S.; Biswas, U.; Bansal, D.; Biswas, N.J. Design and Development of an Autonomous Underwater Vehicle VARUNA 2.0. Int. J. Eng. Res. Technol. 2020, 9, 1495–1502. [Google Scholar]
- Edge, C.; Sakib, S.; Fulton, M.; Hong, J.; Mo, J.; Barthelemy, K.; Bashaw, H.; Kallevig, B.; Knutson, C.; Orpen, K.; et al. Design and Experiments with LoCO AUV: A Low Cost Open-Source Autonomous Underwater Vehicle. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 1761–1768. [Google Scholar]
- Castillo-Zamora, J.J.; Camarillo-Gómez, K.A.; Pérez-Soto, G.I.; Rodríguez-Reséndiz, J.; Morales-Hernández, L.A. Mini-AUV Hydrodynamic Parameters Identification via CFD Simulations and Their Application on Control Performance Evaluation. Sensors 2021, 21, 820. [Google Scholar] [CrossRef]
- Bianchi Figueiredo, A.; Coimbra Matos, A. MViDO: A High Performance Monocular Vision-Based System for Docking A Hovering AUV. Appl. Sci. 2020, 10, 2991. [Google Scholar] [CrossRef]
- Gutnik, Y.; Avni, A.; Treibitz, T.; Groper, M. On the Adaptation of an AUV into a Dedicated Platform for Close Range Imaging Survey Missions. J. Mar. Sci. Eng. 2022, 10, 974. [Google Scholar] [CrossRef]
- Flores, H.; Zuniga, A.; Hossein Motlagh, N.; Liyanage, M.; Passananti, M.; Tarkoma, S.; Youssef, M.; Nurmi, P. PENGUIN: Aquatic plastic pollution sensing using AUVs. In Proceedings of the ACM Workshop on Micro Aerial Vehicle Networks, Systems, and Applications, Toronto, ON, Canada, 15 June 2020. [Google Scholar] [CrossRef]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An underwater glider propelled by environmental energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Wang, J.; Wu, Z.; Dong, H.; Tan, M.; Yu, J. Development and Control of Underwater Gliding Robots: A Review. IEEE/CAA J. Autom. Sin. 2022, 9, 1543–1560. [Google Scholar] [CrossRef]
- Wood, S. Autonomous Underwater Gliders; InTech: Vienna, Austria, 2009. [Google Scholar]
- Griffiths, G.; Jones, C.; Ferguson, J.; Bose, N. Undersea gliders. J. Ocean Technol. 2007, 2, 64–75. [Google Scholar]
- Claus, B.; Bachmayer, R. Terrain-aided Navigation for an Underwater Glider. J. Field Robot. 2015, 32, 935–951. [Google Scholar] [CrossRef]
- Stuntz, A.; Kelly, J.S.; Smith, R.N. Enabling Persistent Autonomy for Underwater Gliders with Ocean Model Predictions and Terrain-Based Navigation. Front. Robot. AI 2016, 3, 23. [Google Scholar] [CrossRef]
- Garau, B.; Ruiz, S.; Zhang, W.; Pascual, A.; Heslop, E.; Kerfoot, J.; Tintoré, J. Thermal Lag Correction on Slocum CTD Glider Data. J. Atmos. Ocean. Technol. 2011, 28, 1065–1071. [Google Scholar] [CrossRef]
- Webster, S.E.; Freitag, L.E.; Lee, C.M.; Gobat, J.I. Towards real-time under-ice acoustic navigation at mesoscale ranges. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 537–544. [Google Scholar]
- Thurnherr, A.M.; Symonds, D.; Laurent, L.S. Processing explorer ADCP data collected on slocum gliders using the LADCP shear method. In Proceedings of the 2015 IEEE/OES Eleveth Current, Waves and Turbulence Measurement (CWTM), St. Petersburg, FL, USA, 2–6 March 2015; pp. 1–7. [Google Scholar]
- Bhatta, P.; Fiorelli, E.; Lekien, F.; Leonard, N.E.; Paley, D.A.; Zhang, F.; Bachmayer, R.; Sepulchre, R. Coordination of an underwater glider fleet for adaptive ocean sampling. In Proceedings of the International Workshop on Underwater Robotics, Genoa, Italy, 9–11 November 2005. [Google Scholar]
- Alvarez, A.; Caffaz, A.; Caiti, A.; Casalino, G.; Gualdesi, L.; Turetta, A.; Viviani, R. Fòlaga: A low-cost autonomous underwater vehicle combining glider and AUV capabilities. Ocean Eng. 2009, 36, 24–38. [Google Scholar] [CrossRef]
- Leonard, N.E.; Paley, D.A.; Davis, R.E.; Fratantoni, D.M.; Lekien, F.; Zhang, F. Coordinated control of an underwater glider fleet in an adaptive ocean sampling field experiment in Monterey Bay. J. Field Robot. 2010, 27, 718–740. [Google Scholar] [CrossRef]
- Sherman, J.; Davis, R.E.; Owens, W.B.; Valdes, J. The autonomous underwater glider “Spray”. IEEE J. Ocean. Eng. 2001, 26, 437–446. [Google Scholar] [CrossRef]
- Eriksen, C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Seaglider: A long-range autonomous underwater vehicle for oceanographic research. IEEE J. Ocean. Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef]
- Chemori, A.; Kuusmik, K.; Salumäe, T.; Kruusmaa, M. Depth control of the biomimetic U-CAT turtle-like AUV with experiments in real operating conditions. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4750–4755. [Google Scholar]
- Hernández-Jaramillo, D.C.; Vásquez, R.E. Design of a Bioinspired Underwater Glider for Oceanographic Research. Biomimetics 2023, 8, 80. [Google Scholar] [CrossRef] [PubMed]
- Ratas, M.; Chemori, A.; Kruusmaa, M. PHA-Based Feedback Control of a Biomimetic AUV for Diver Following: Design, Simulations and Real-Time Experiments. In Proceedings of the 2022 European Control Conference (ECC), London, UK, 12–15 July 2022; pp. 503–509. [Google Scholar]
- Barngrover, C.; Kastner, R.; Denewiler, T.; Mills, G. The stingray AUV: A small and cost-effective solution for ecological monitoring. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–8. [Google Scholar]
- Glushko, I.; Olenew, E.; Komar, M.; Kniese, L.; Sokolovskyi, R.; Kebkal, O.; Bannasch, R.; Kebkal, K. Software Control Architecture for the BOSS Manta Ray AUV Actuation System. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–5. [Google Scholar]
- Berlinger, F.; Gauci, M.; Nagpal, R. Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm. Sci. Robot. 2021, 6, eabd8668. [Google Scholar] [CrossRef] [PubMed]
- Oliveira Pedro dos Santos, S.; Cuenca-Jiménez, F.; Gomez-Valdez, P.; Morales-Lopez, O.; Wilhelmus, M. RoboKrill: A metachronal drag-based swimmer robot. arXiv 2022, arXiv:2202.01037. [Google Scholar]
- Bujard, T.; Giorgio-Serchi, F.; Weymouth, G.D. A resonant squid-inspired robot unlocks biological propulsive efficiency. Sci. Robot. 2021, 6, eabd2971. [Google Scholar] [CrossRef] [PubMed]
- Plum, F.; Labisch, S.; Dirks, J.-H. SAUV—A Bio-Inspired Soft-Robotic Autonomous Underwater Vehicle. Front. Neurorobot. 2020, 14, 8. [Google Scholar] [CrossRef]
- Raja, V.; Solaiappan, S.K.; Kumar, L.; Marimuthu, A.; Gnanasekaran, R.K.; Choi, Y. Design and Computational Analyses of Nature Inspired Unmanned Amphibious Vehicle for Deep Sea Mining. Minerals 2022, 12, 342. [Google Scholar] [CrossRef]
- Zimmerman, S.; Abdelkefi, A. Review of marine animals and bioinspired robotic vehicles: Classifications and characteristics. Prog. Aerosp. Sci. 2017, 93, 95–119. [Google Scholar] [CrossRef]
- Salazar, R.; Campos, A.; Fuentes, V.; Abdelkefi, A. A review on the modeling, materials, and actuators of aquatic unmanned vehicles. Ocean Eng. 2019, 172, 257–285. [Google Scholar] [CrossRef]
- Consi, T.R.; Mueller, W.; Leep, N.; Keifenheim, J.; Houdek, S. The shrimpfish as a model for a novel, highly maneuverable AUV. In Proceedings of the OCEANS 2015—MTS/IEEE Washington, Washington, DC, USA, 19–22 October 2015; pp. 1–7. [Google Scholar]
- Font, D.; Tresanchez, M.; Siegentahler, C.; Pallejà, T.; Teixidó, M.; Pradalier, C.; Palacin, J. Design and Implementation of a Biomimetic Turtle Hydrofoil for an Autonomous Underwater Vehicle. Sensors 2011, 11, 11168–11187. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Liu, X.; Huang, H.; Chen, Y. Development of an Autonomous Underwater Helicopter with High Maneuverability. Appl. Sci. 2019, 9, 4072. [Google Scholar] [CrossRef]
- Du, P.; Huang, S.H.; Yang, W.; Wang, Y.; Wang, Z.; Hu, R.; Chen, Y. Design of a Disc-Shaped Autonomous Underwater Helicopter with Stable Fins. J. Mar. Sci. Eng. 2022, 10, 67. [Google Scholar] [CrossRef]
- Zhou, J.; He, J.; Huang, H.; Wang, Y.; Si, Y.; Huang, S.; Xu, B.; Chen, Y. Closeup exploration of the seafloor with an autonomous underwater helicopter. Res. Sq. 2021. [CrossRef]
- Birk, A.; Doernbach, T.; Mueller, C.; Luczynski, T.; Chavez, A.G.; Koehntopp, D.; Kupcsik, A.; Calinon, S.; Tanwani, A.K.; Antonelli, G.; et al. Dexterous Underwater Manipulation from Onshore Locations: Streamlining Efficiencies for Remotely Operated Underwater Vehicles. IEEE Robot. Autom. Mag. 2018, 25, 24–33. [Google Scholar] [CrossRef]
- Brantner, G.; Khatib, O. Controlling Ocean One: Human–robot collaboration for deep-sea manipulation. J. Field Robot. 2021, 38, 28–51. [Google Scholar] [CrossRef]
- Bowen, A.D.; Jakuba, M.V.; Farr, N.E.; Ware, J.; Taylor, C.; Gomez-Ibanez, D.; Machado, C.R.; Pontbriand, C. An un-tethered ROV for routine access and intervention in the deep sea. In Proceedings of the 2013 OCEANS–San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–7. [Google Scholar]
- Yoerger, D.R.; Govindarajan, A.F.; Howland, J.C.; Llopiz, J.K.; Wiebe, P.H.; Curran, M.; Fujii, J.; Gomez-Ibanez, D.; Katija, K.; Robison, B.H.; et al. A hybrid underwater robot for multidisciplinary investigation of the ocean twilight zone. Sci. Robot. 2021, 6, eabe1901. [Google Scholar] [CrossRef] [PubMed]
- Marani, G.; Choi, S.K.; Yuh, J. Underwater autonomous manipulation for intervention missions AUVs. Ocean Eng. 2009, 36, 15–23. [Google Scholar] [CrossRef]
- Prats, M.; Ribas, D.; Palomeras, N.; García, J.C.; Nannen, V.; Wirth, S.; Fernández, J.J.; Beltrán, J.P.; Campos, R.; Ridao, P.; et al. Reconfigurable AUV for intervention missions: A case study on underwater object recovery. Intell. Serv. Robot. 2012, 5, 19–31. [Google Scholar] [CrossRef]
- Ribas, D.; Palomeras, N.; Ridao, P.; Carreras, M.; Mallios, A. Girona 500 AUV: From survey to intervention. IEEE/ASME Trans. Mechatron. 2012, 17, 46–53. [Google Scholar] [CrossRef]
- Ridao, P.; Carreras, M.; Ribas, D.; Sanz, P.J.; Oliver, G. Intervention AUVs: The Next Challenge. In Proceedings of the 19th World Congress The International Federation of Automatic Control, Cape Town, South Africa, 24–29 August 2014. [Google Scholar]
- Simetti, E.; Casalino, G.; Torelli, S.; Sperindé, A.; Turetta, A. Floating Underwater Manipulation: Developed Control Methodology and Experimental Validation within the TRIDENT Project. J. Field Robot. 2014, 31, 364–385. [Google Scholar] [CrossRef]
- Lane, D.M.; Davies, J.B.C.; Casalino, G.; Bartolini, G.; Cannata, G.; Veruggio, G.; Canals, M.; Smith, C.; Brien, D.J.O.; Pickett, M.; et al. AMADEUS: Advanced manipulation for deep underwater sampling. IEEE Robot. Autom. Mag. 1997, 4, 34–45. [Google Scholar] [CrossRef]
- Evans, J.; Redmond, P.; Plakas, C.; Hamilton, K.; Lane, D. Autonomous docking for Intervention-AUVs using sonar and video-based real-time 3D pose estimation. In Proceedings of the Oceans 2003. Celebrating the Past … Teaming Toward the Future (IEEE Cat. No.03CH37492), San Diego, CA, USA, 22–26 September 2003; Volume 2204, pp. 2201–2210. [Google Scholar]
- Suming, Q.; Weicheng, C. An overview on aquatic unmanned aerial vehicles. Ann. Rev. Res. 2019, 5, 555663. [Google Scholar] [CrossRef]
- Neto, A.A.; Mozelli, L.A.; Drews, P.L.J.; Campos, M.F.M. Attitude control for an Hybrid Unmanned Aerial Underwater Vehicle: A robust switched strategy with global stability. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 395–400. [Google Scholar]
- Villegas, A.; Mishkevich, V.; Gulak, Y.; Diez, F.J. Analysis of key elements to evaluate the performance of a multirotor unmanned aerial–aquatic vehicle. Aerosp. Sci. Technol. 2017, 70, 412–418. [Google Scholar] [CrossRef]
- Alzu’bi, H.; Mansour, I.; Rawashdeh, O. Loon Copter: Implementation of a hybrid unmanned aquatic–aerial quadcopter with active buoyancy control. J. Field Robot. 2018, 35, 764–778. [Google Scholar] [CrossRef]
- Lu, D.; Xiong, C.; Lyu, B.; Zeng, Z.; Lian, L. Multi-Mode Hybrid Aerial Underwater Vehicle with Extended Endurance. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–7. [Google Scholar]
- Mercado Ravell, D.A.; Maia, M.M.; Diez, F.J. Modeling and control of unmanned aerial/underwater vehicles using hybrid control. Control Eng. Pract. 2018, 76, 112–122. [Google Scholar] [CrossRef]
- Vyas, A.; Puppala, R.; Sivadasan, N.; Molawade, A.; Ranganathan, T.; Thondiyath, A. Modelling and Dynamic Analysis of a Novel Hybrid Aerial—Underwater Robot—Acutus. In Proceedings of the OCEANS 2019–Marseille, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- Li, L.; Wang, S.; Zhang, Y.; Song, S.; Wang, C.; Tan, S.; Zhao, W.; Wang, G.; Sun, W.; Yang, F.; et al. Aerial-aquatic robots capable of crossing the air-water boundary and hitchhiking on surfaces. Sci. Robot. 2022, 7, eabm6695. [Google Scholar] [CrossRef]
- Bi, Y.; Jin, Y.; Lyu, C.; Zeng, Z.; Lian, L. Nezha-Mini: Design and Locomotion of a Miniature Low-Cost Hybrid Aerial Underwater Vehicle. IEEE Robot. Autom. Lett. 2022, 7, 6669–6676. [Google Scholar] [CrossRef]
- Bi, Y.; Jin, Y.; Zhou, H.; Bai, Y.; Lyu, C.; Zeng, Z.; Lian, L. Surfing Algorithm: Agile and Safe Transition Strategy for Hybrid Aerial Underwater Vehicle in Waves. IEEE Trans. Robot. 2023, 39, 4262–4278. [Google Scholar] [CrossRef]
- Maia, M.; Soni, P.; Diez-Garias, F. Demonstration of an Aerial and Submersible Vehicle Capable of Flight and Underwater Navigation with Seamless Air-Water Transition. arXiv 2015, arXiv:1507.01932. [Google Scholar]
- Shkurti, F.; Xu, A.; Meghjani, M.; Higuera, J.C.G.; Girdhar, Y.; Giguère, P.; Dey, B.B.; Li, J.; Kalmbach, A.; Prahacs, C.; et al. Multi-domain monitoring of marine environments using a heterogeneous robot team. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1747–1753. [Google Scholar]
- Leonessa, A.; Morel, Y. Indirect Collaborative Control of Autonomous Vehicles with Limited Communication Bandwidth. In Proceedings of the 2006 Florida Conference on Recent Advances in Robotics, FCRAR 2006, Miami, FL, USA, 25–26 May 2006. [Google Scholar]
- Belbachir, A.; Ingrand, F.; Lacroix, S. A cooperative architecture for target localization using multiple AUVs. Intell. Serv. Robot. 2012, 5, 119–132. [Google Scholar] [CrossRef]
- Chrpa, L.; Pinto, J.; Marques, T.S.; Ribeiro, M.A.; Sousa, J. Mixed-initiative planning, replanning and execution: From concept to field testing using AUV fleets. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 6825–6830. [Google Scholar]
- Schmickl, T.; Thenius, R.; Moslinger, C.; Timmis, J.; Tyrrell, A.; Read, M.; Hilder, J.; Halloy, J.; Campo, A.; Stefanini, C.; et al. CoCoRo—The Self-Aware Underwater Swarm. In Proceedings of the 2011 Fifth IEEE Conference on Self-Adaptive and Self-Organizing Systems Workshops, Arbor, MI, USA, 3–7 October 2011; pp. 120–126. [Google Scholar]
- Leonard, N.E.; Fiorelli, E. Virtual leaders, artificial potentials and coordinated control of groups. In Proceedings of the Proceedings of the 40th IEEE Conference on Decision and Control (Cat. No.01CH37228), Orlando, FL, USA, 4–7 December 2001; Volume 2963, pp. 2968–2973. [Google Scholar]
- Ogren, P.; Leonard, N.E. Obstacle avoidance in formation. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 2492, pp. 2492–2497. [Google Scholar]
- Yoon, S.; Qiao, C. Cooperative Search and Survey Using Autonomous Underwater Vehicles (AUVs). IEEE Trans. Parallel Distrib. Syst. 2011, 22, 364–379. [Google Scholar] [CrossRef]
- González-García, J.; Gómez-Espinosa, A.; Cuan-Urquizo, E.; García-Valdovinos, L.G.; Salgado-Jiménez, T.; Cabello, J.A. Autonomous Underwater Vehicles: Localization, Navigation, and Communication for Collaborative Missions. Appl. Sci. 2020, 10, 1256. [Google Scholar] [CrossRef]
- Phillips, A.B.; Salavasidis, G.; Kingsland, M.; Harris, C.; Pebody, M.; Templeton, D.R.R.; McPhail, S.; Prampart, T.; Wood, T.; Taylor, R.; et al. Autonomous Surface/Subsurface Survey System Field Trials. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–6. [Google Scholar]
- Lin, Y.; Hsiung, J.; Piersall, R.; White, C.; Lowe, C.G.; Clark, C.M. A Multi-Autonomous Underwater Vehicle System for Autonomous Tracking of Marine Life. J. Field Robot. 2017, 34, 757–774. [Google Scholar] [CrossRef]
- Yang, D.; Cai, L.; Jamieson, S.; Girdhar, Y. Robot Goes Fishing: Rapid, High-Resolution Biological Hotspot Mapping in Coral Reefs with Vision-Guided Autonomous Underwater Vehicles. arXiv 2023, arXiv:2305.02330. [Google Scholar] [CrossRef]
- Girdhar, Y.; McGuire, N.; Cai, L.; Jamieson, S.; McCammon, S.; Claus, B.; Soucie, J.E.S.; Todd, J.E.; Mooney, T.A. CUREE: A Curious Underwater Robot for Ecosystem Exploration. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 11411–11417. [Google Scholar]
- Mou, S.; Tsai, D.; Dunbabin, M. Reconfigurable Robots for Scaling Reef Restoration. arXiv 2022, arXiv:2205.04612. [Google Scholar] [CrossRef]
- Zhou, J.; Zhou, N.; Che, Y.; Gao, J.; Zhao, L.; Huang, H.; Chen, Y. Design and Development of an Autonomous Underwater Helicopter for Ecological Observation of Coral Reefs. Sensors 2022, 22, 1770. [Google Scholar] [CrossRef] [PubMed]
- Dunbabin, M.; Manley, J.; Harrison, P.L. Uncrewed Maritime Systems for Coral Reef Conservation. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–6. [Google Scholar]
- Arima, M.; Yoshida, K.; Tonai, H. Development of a coral monitoring system for the use of underwater vehicle. In Proceedings of the OCEANS 2014—TAIPEI, Taipei, Taiwan, 7–10 April 2014; pp. 1–6. [Google Scholar]
- Clement, R.; Dunbabin, M.; Wyeth, G. Toward Robust Image Detection of Crown-of-Thorns Starfish for Autonomous Population Monitoring. In Proceedings of the 2005 Australasian Conference on Robotics and Automation, ACRA 2005, Sydney, Australia, 5–7 December 2005. [Google Scholar]
- Dunbabin, M.; Roberts, J.; Usher, K.; Winstanley, G.; Corke, P. A Hybrid AUV Design for Shallow Water Reef Navigation. In Proceedings of the Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2105–2110. [Google Scholar]
- Dunbabin, M.; Roberts, J.; Usher, K.; Corke, P. A new robot for environmental monitoring on the Great Barrier Reef. In Proceedings of the 2004 Australasian Conference on Robotics and Automation, Canberra, Australia, 6–8 December 2004; Barnes, N., Austin, D., Eds.; Australian Robotics and Automation Association (ARAA): Sydney, Australia, 2004; pp. 1–7. [Google Scholar]
- Montes-Herrera, J.C.; Hill, N.; Cummings, V.J.; Johnstone, G.J.; Stark, J.S.; Lucieer, V. Remote sensing of Antarctic polychaete reefs (Serpula narconensis): Reproducible workflows for quantifying benthic structural complexity with action cameras, remotely operated vehicles and structure-from-motion photogrammetry. Remote Sens. Ecol. Conserv. 2024, 10, 72–90. [Google Scholar] [CrossRef]
- Price, D.M.; Robert, K.; Callaway, A.; Lo lacono, C.; Hall, R.A.; Huvenne, V.A.I. Using 3D photogrammetry from ROV video to quantify cold-water coral reef structural complexity and investigate its influence on biodiversity and community assemblage. Coral Reefs 2019, 38, 1007–1021. [Google Scholar] [CrossRef]
- Galloway, K.; Becker, K.; Phillips, B.; Kirby, J.; Licht, S.; Wood, R.; Gruber, D. Soft Robotic Grippers for Biological Sampling on Deep Reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef]
- Marouchos, A.; Underwood, M.; Babcock, R. Starbug X AUV: Field trials and analysis of in-situ multi-channel AUV data. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016; pp. 76–80. [Google Scholar]
- Marouchos, A.; Muir, B.; Babcock, R.; Dunbabin, M. A shallow water AUV for benthic and water column observations. In Proceedings of the OCEANS 2015—Genova, Genova, Italy, 18–21 May 2015; pp. 1–7. [Google Scholar]
- Beall, C.; Dellaert, F.; Mahon, I.; Williams, S. Bundle adjustment in large-scale 3D reconstructions based on underwater robotic surveys. In Proceedings of the OCEANS 2011 IEEE—Spain, Santander, Spain, 6–9 June 2011; pp. 1–6. [Google Scholar]
- Williams, S.; Pizarro, O.; How, M.; Mercer, D.; Powell, G.; Marshall, J.; Hanlon, R. Surveying noctural cuttlefish camouflage behaviour using an AUV. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 214–219. [Google Scholar]
- Singh, H.; Armstrong, R.; Gilbes, F.; Eustice, R.; Roman, C.; Pizarro, O.; Torres, J. Imaging coral I: Imaging coral habitats with the SeaBED AUV. Subsurf. Sens. Technol. Appl. 2004, 5, 25–42. [Google Scholar] [CrossRef]
- Patterson, M.R.; Relles, N.J. Autonomous Underwater Vehicles resurvey Bonaire: A new tool for coral reef management. In Proceedings of the 11th International Coral Reef Symposium, Ft. Lauderdale, FL, USA, 7–11 July 2008. [Google Scholar]
- Grasmueck, M.; Eberli, G.; Correa, T.; Viggiano, D.A.; Luo, J.; Wyatt, G.J.; Reed, J.; Wright, A.; Pomponi, S.A. AUV-Based Environmental Characterization of Deepwater Coral Mounds in the Straits of Florida. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2007; Volume 18510. [Google Scholar] [CrossRef]
- Cardenas, J.A.; Samadikhoshkho, Z.; Rehman, A.U.; Valle-Pérez, A.U.; de León, E.H.-P.; Hauser, C.A.E.; Feron, E.M.; Ahmad, R. A systematic review of robotic efficacy in coral reef monitoring techniques. Mar. Pollut. Bull. 2024, 202, 116273. [Google Scholar] [CrossRef] [PubMed]
- Madin, E.M.P.; Darling, E.S.; Hardt, M.J. Emerging Technologies and Coral Reef Conservation: Opportunities, Challenges, and Moving Forward. Front. Mar. Sci. 2019, 6, 727. [Google Scholar] [CrossRef]
- Paraschiv, M.; Padrino, R.; Casari, P.; Bigal, E.; Scheinin, A.; Tchernov, D.; Fernández Anta, A. Classification of Underwater Fish Images and Videos via Very Small Convolutional Neural Networks. J. Mar. Sci. Eng. 2022, 10, 736. [Google Scholar] [CrossRef]
- Khan, C.; Blount, D.; Parham, J.; Holmberg, J.; Hamilton, P.; Charlton, C.; Christiansen, F.; Johnston, D.; Rayment, W.; Dawson, S.; et al. Artificial intelligence for right whale photo identification: From data science competition to worldwide collaboration. Mamm. Biol. 2022, 102, 1025–1042. [Google Scholar] [CrossRef]
- Ramos-Arredondo, R.; Carvajal-Gámez, B.; Gallegos-Funes, F.; Gendron, D. Multi-spatial Classifier for Blue Whale Images using Photo-identification Method. Res. Comput. Sci. 2014, 82, 31–40. [Google Scholar] [CrossRef]
- Suárez-Domínguez, E.A.; Martínez-Serrano, I.; Righini, N.; Chamlaty-Fayad, Y.E.; Bello-Sánchez, E.A.; Ramos-Díaz, A.H. Fibropapillomatosis in free-ranging green sea turtles (Chelonia mydas) off the central coast of Veracruz, Mexico. Cienc. Mar. 2020, 46, 133–143. [Google Scholar] [CrossRef]
- Knot, I.E.; Zouganelis, G.D.; Weedall, G.D.; Wich, S.A.; Rae, R. DNA Barcoding of Nematodes Using the MinION. Front. Ecol. Evol. 2020, 8, 100. [Google Scholar] [CrossRef]
- Chang, J.J.M.; Ip, Y.C.A.; Ng, C.S.L.; Huang, D. Takeaways from Mobile DNA Barcoding with BentoLab and MinION. Genes 2020, 11, 1121. [Google Scholar] [CrossRef] [PubMed]
- Johri, S.; Solanki, J.; Cantu, V.A.; Fellows, S.R.; Edwards, R.A.; Moreno, I.; Vyas, A.; Dinsdale, E.A. ‘Genome skimming’ with the MinION hand-held sequencer identifies CITES-listed shark species in India’s exports market. Sci. Rep. 2019, 9, 4476. [Google Scholar] [CrossRef] [PubMed]
- Enya, K.; Sasaki, S.; Kunieda, T. A polymerase chain reaction experiment using Excherichia coli and Mars sand simulant for detection and analysis of extraterrestrial life. Life Sci. Space Res. 2024, 42, 84–90. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).