1. Introduction
Collaboration between Remotely Operated Vehicles (ROVs) in underwater activities is extremely advantageous and diverse. By permitting the simultaneous execution of multiple tasks instead of relying exclusively on a single vehicle, a significant improvement in operational efficiency is achieved and the total available cargo capacity is expanded. Moreover, coordinating the movements of multiple ROVs for the inspection of marine environments not only expands the work area but also reduces costs and facilitates more effective adaptation to changes, bringing greater flexibility and efficiency to underwater operations. An important additional advantage is the redundancy provided by the presence of multiple vehicles, which increases operational reliability by providing an alternative in the event of failure of one of the vehicles.
As a direct consequence of these operational advantages, a decrease in operating costs can be observed, as well as a notable increase in the speed and efficiency of underwater activities. Nowadays, a variety of collaborative tasks are available that use various control systems, the most notable being those that mention control challenges in a non-linear manner. Since the six-degree-of-freedom (DOF) dynamics of the system are highly non-linear and therefore difficult to control, innovative approaches have been developed to address this challenge.
In recent research, various technologies have been explored to address collaborative tasks in underwater environments. For example, some studies have chosen to use cameras for object detection, combining them with PID control systems and Kalman filters for this purpose [
1]. Other researchers have found the use of acoustic modems in conjunction with non-linear control systems based on sliding modes [
2] and have integrated these technologies with cameras to improve localization accuracy. Additionally, the potential of predictive control has been explored, especially when combined with acoustic modems to achieve greater control accuracy and efficiency [
3]. On the other hand, backstepping control has also been proposed as an alternative to this type of problem [
4].
The previous studies have overlooked communication constraints common in maritime environments, such as delays in data transmission, long sampling periods generated by sensors, and the inherent latency of acoustic modems. Furthermore, these studies have minimized the impacts of changes in the direction and strength of ocean currents. To address these challenges, the use of predictors has been used. These efforts can be divided into two main categories: classical predictors and intelligent predictors. Within the field of classical predictors, methods such as prediction using autoregressive models [
5] are included, which have shown good results in situations such as the formation of ships with communication delays [
6]. The combination of these approaches and predictive control techniques is proposed as a solution to optimize results during training [
7]; this approach has also been used to mitigate chattering induced by communication delay, which has previously been successfully employed to improve the precision in the movement of a robotic arm [
8]. The Kalman filter stands out as one of the most used approaches in this regard. These techniques have proven to be effective thanks to their extensive documentation and consistent results. However, it is essential to explore new strategies to improve prediction accuracy in marine environments, especially given the difficulty of variables and variable conditions of the underwater environment.
Advanced predictors are systems that incorporate membership functions and merge them with control techniques. This approach is used to make accurate estimates of the position of an ROV [
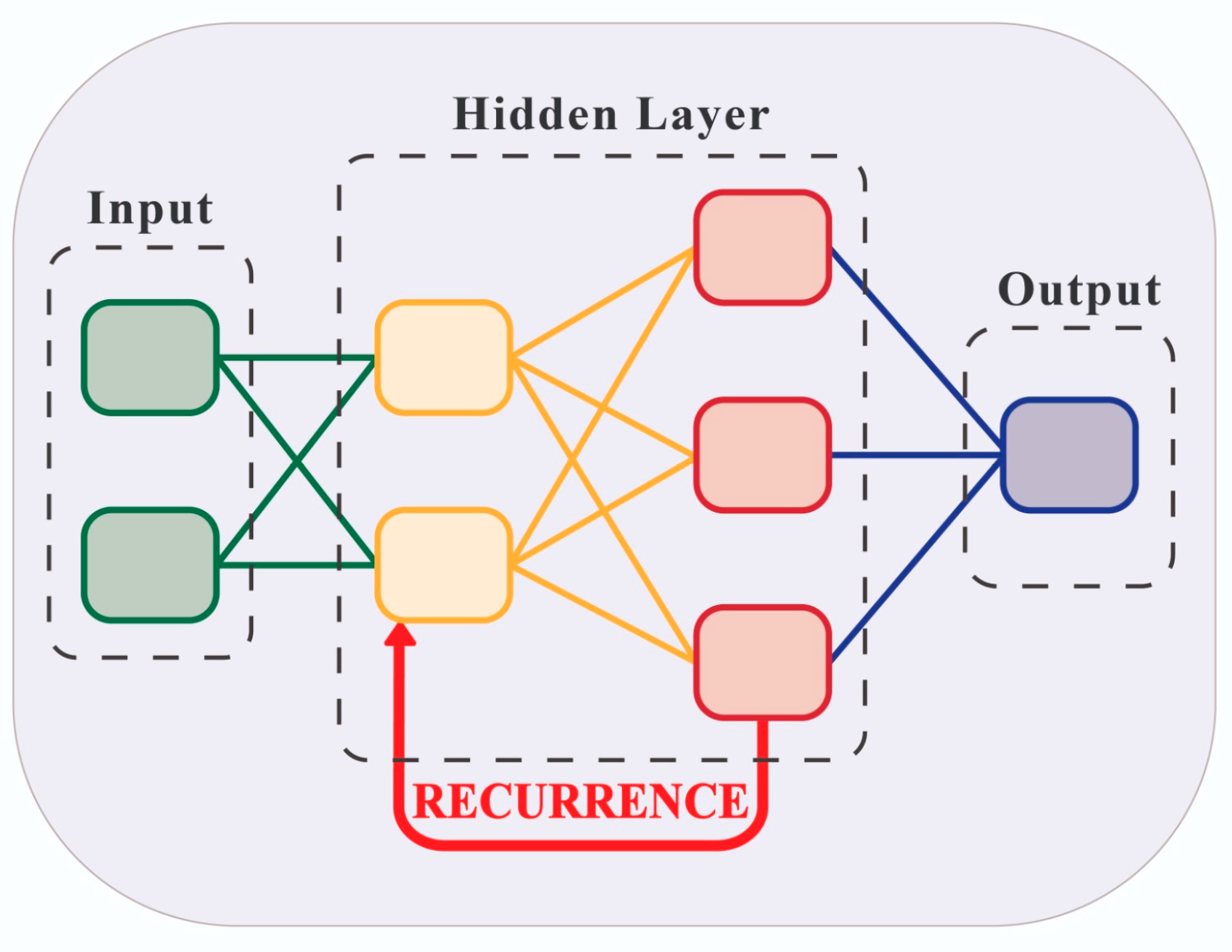
9], considering the influence of ocean currents. Another notable area is recursive neural networks (RNNs), which excel at handling non-linear relationships and more complex patterns. This capability permits them to compensate for long frequency delays and periods, as well as predict patterns in waves and ocean currents. In this sense, promising results have been observed with techniques such as the modified neural network (ECRNet) to predict the slip caused by currents and improve the precision of the trajectory due to the noise generated by a GPS sensor and where memory is already implemented in the predictor. Likewise, the use of a Gated Recurrent Unit (GRU) [
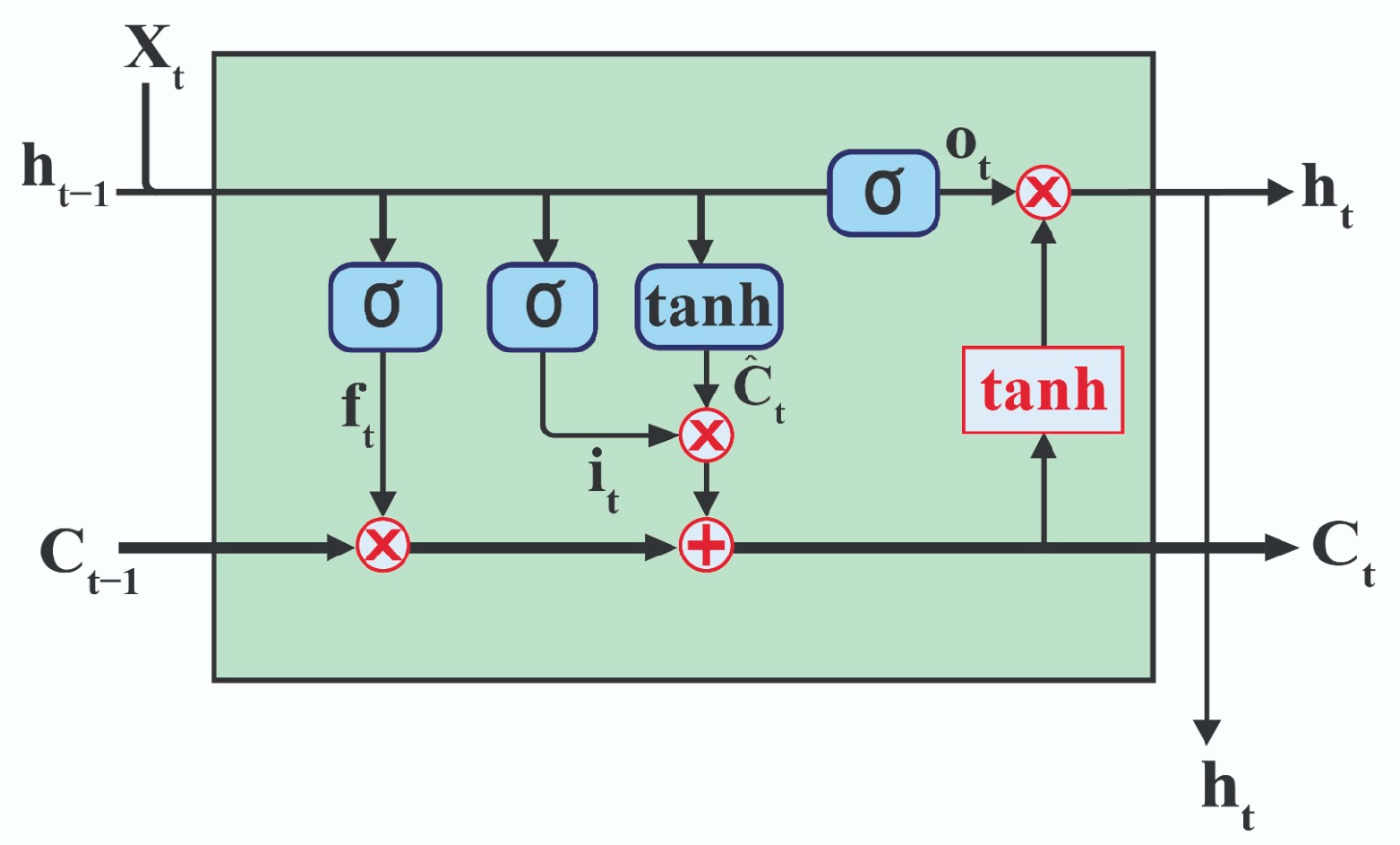
10] has shown good results, as has the application of RNN systems to improve the precision in the position of a glider. Among the most used techniques for their memory capacities are LSTM (Long Short-Term Memory) and its variants. They have been applied to analyze ocean currents and adjust PID control parameters accordingly. This methodology not only facilitates the understanding of ocean current dynamics but also allows optimization of PID control performance to maintain more accuracy and stable navigation in variable and challenging maritime environments. Integrating these current studies with dynamic adjustments of PID control represents an effective strategy to improve the adaptability and efficiency of underwater navigation systems [
11], as well as in the present prediction to optimize neuro-PID (Proportional, Integral, Derivative) control [
12]. Moreover, a technique called LSTM-Decay has emerged that is widely recognized for its ability to predict time delay and data loss, frequent phenomena due to effective communication between various sensors. This variant of recurrent neural networks has been highlighted for its ability to manage and mitigate the adverse effects of irregular communication between sensors, thus providing a significant improvement in the reliability and accuracy of the prediction of critical data [
13]. This approach has been collaboratively implemented to determine a diver’s location and coordinate with an underwater vehicle. The integration of both systems allows effective and accurate synchronization between the activities of the diver and the operations of the underwater vehicle [
14]. On the other hand, BiLSTM (Bidirectional and Unidirectional LSTM) has proven to be useful in compensating for the slipping caused by an acoustic GPS (Global Positioning System) [
15]. In another paper, it was shown through experiments that the proposed model improved the prediction accuracy in terms of longitude, latitude, and altitude. These results show the effectiveness and reliability of the developed model to estimate geographic coordinates and altitude more accurately, providing a robust and reliable tool for applications that require precise and consistent localization [
16]. In certain studies, Fuzzy control incorporating membership functions has been used to estimate both the sampling period and disturbances. This integration harnesses the adaptability of Fuzzy logic to handle uncertainties and varying conditions, allowing for robust estimation of key parameters essential for system stability and performance. By leveraging membership functions within Fuzzy control frameworks, researchers aim to enhance the accuracy and resilience of sampling period estimation, while also effectively leasing disturbances that could impact system behavior. This approach underestimates the versatility of Fuzzy control in addressing complex challenges in control and calculation within diverse technological applications [
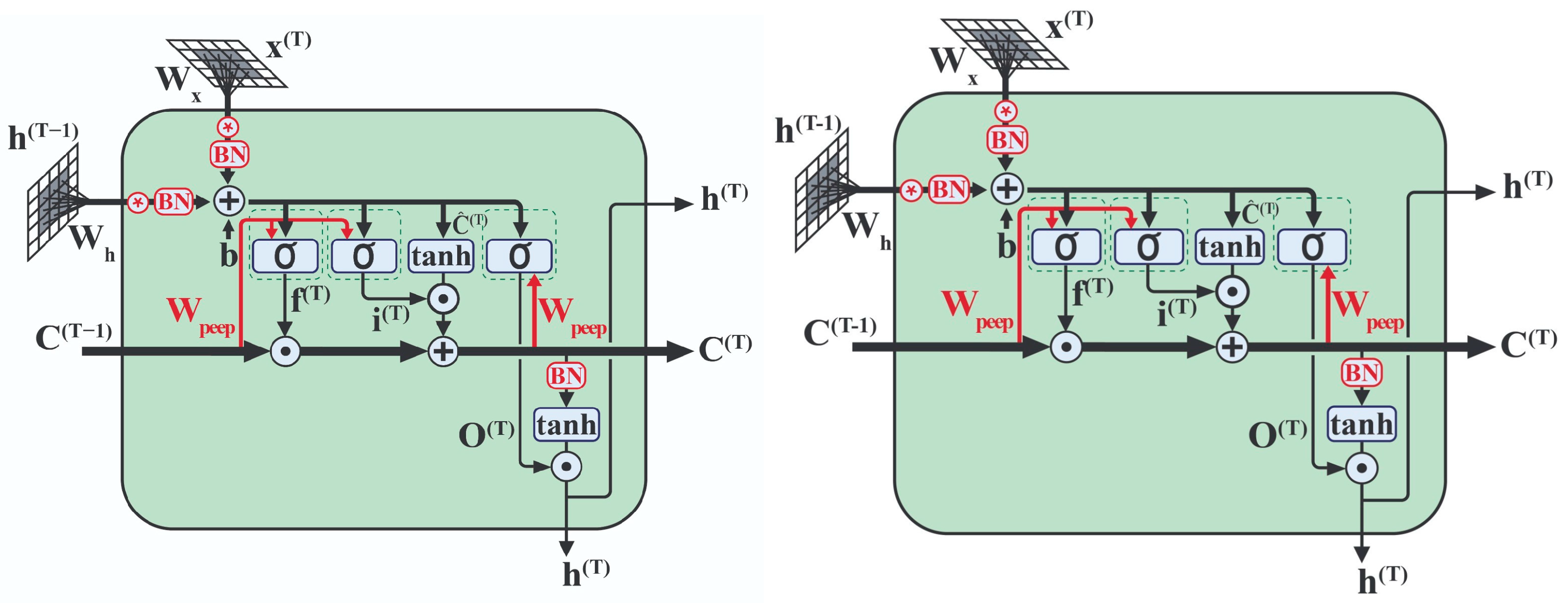
17]. From the literature reviewed, it is inferred that classical predictors have been used in collaborative tasks with delays, but without considering complications in sensor sampling periods. At the same time, intelligent predictors that have dealt with communication delays in addition to current changes have not considered vehicle collaboration. Therefore, this work focuses on proposing a ConvLSTM network, simulating the communication latency caused by acoustic modems, sensor sampling periods, and variant current changes, to obtain trajectory tracking in a leader tracker scheme.
The rest of the article is structured as follows:
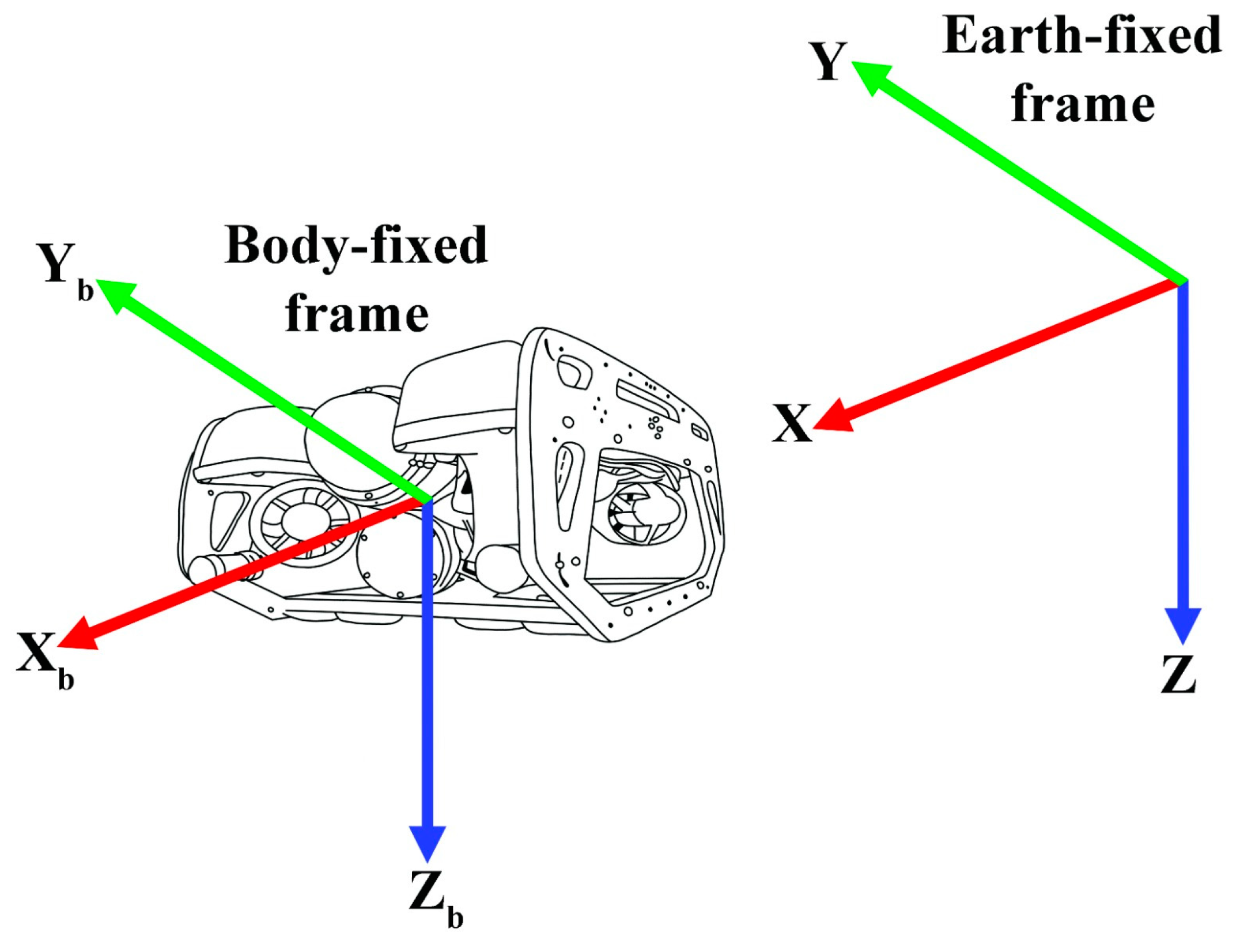
Section 2 shows the dynamics and hydrodynamics of autonomous underwater vehicles.
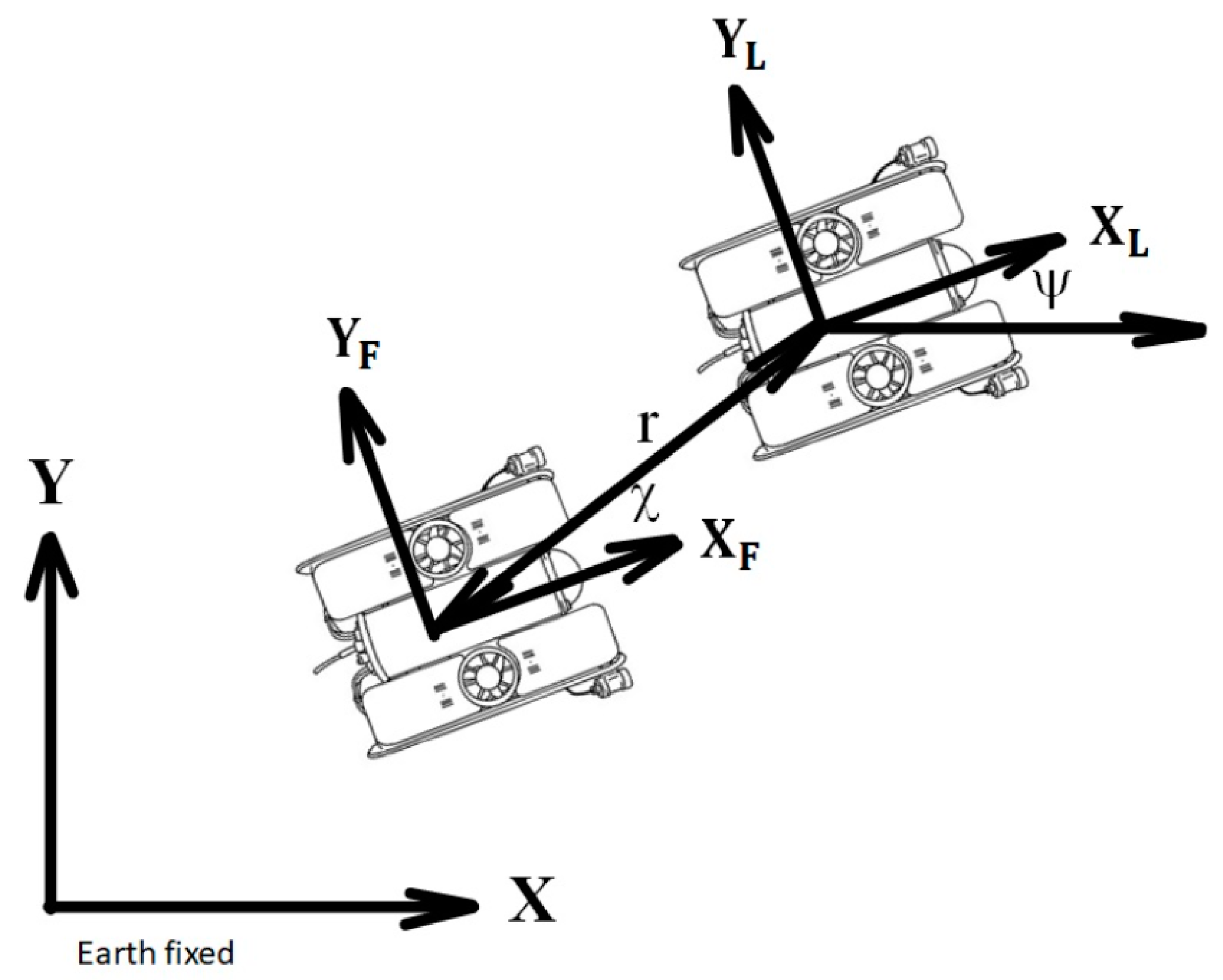
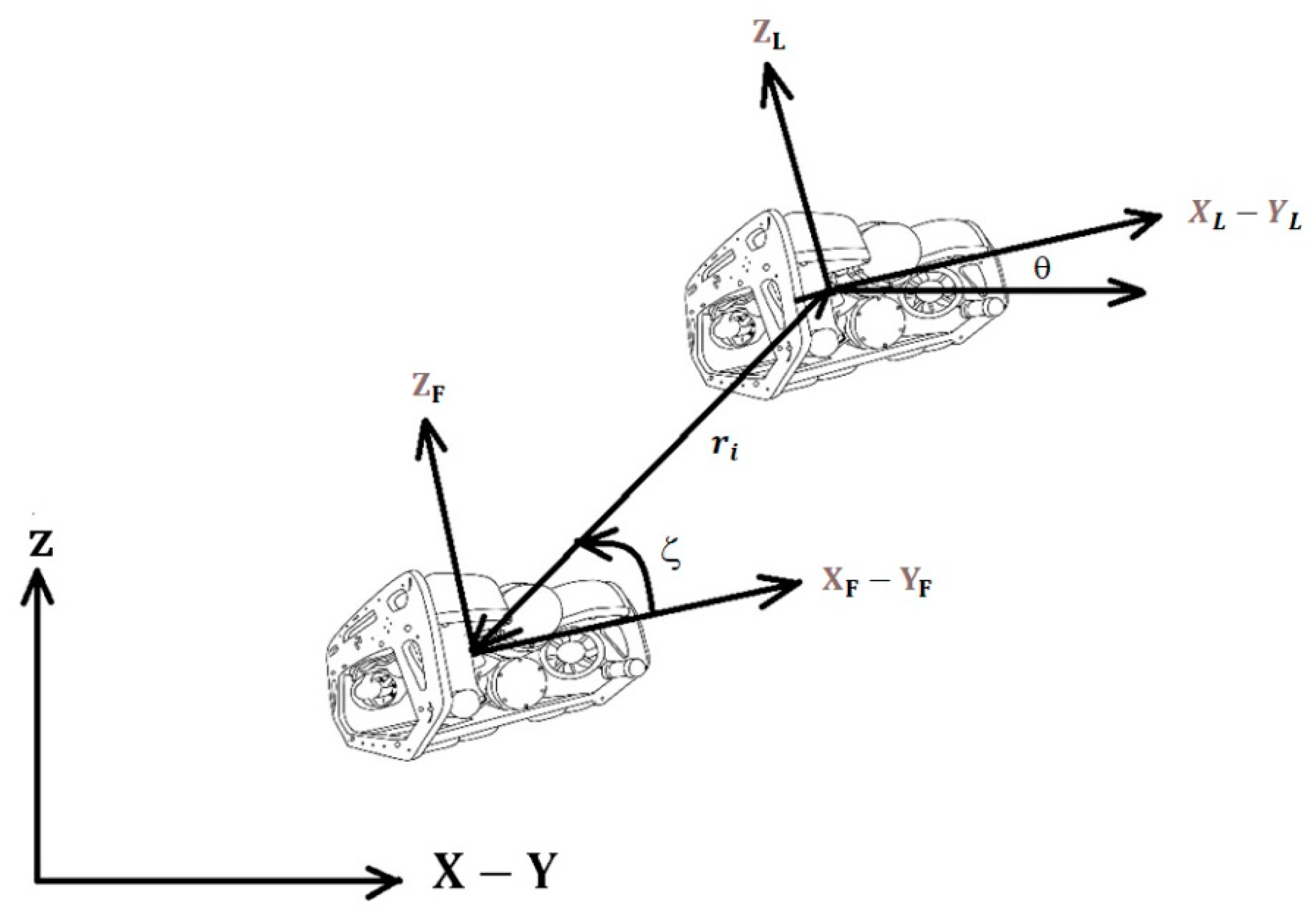
Section 3 talks about the concept of leader–follower and how these vehicles can coordinate as a team. The control and its relationship with the positioning movement, the functionality and application of the simulation, and the results obtained are shown in
Section 4, and finally, the conclusions derived from the study are presented in
Section 5.
3. Simulation Designs
The parameters of the robot as well as its mass, center of floating, and moment of inertia can be found in the article [
20]. The characteristics of the solver to carry out the simulations are shown in
Table 3.
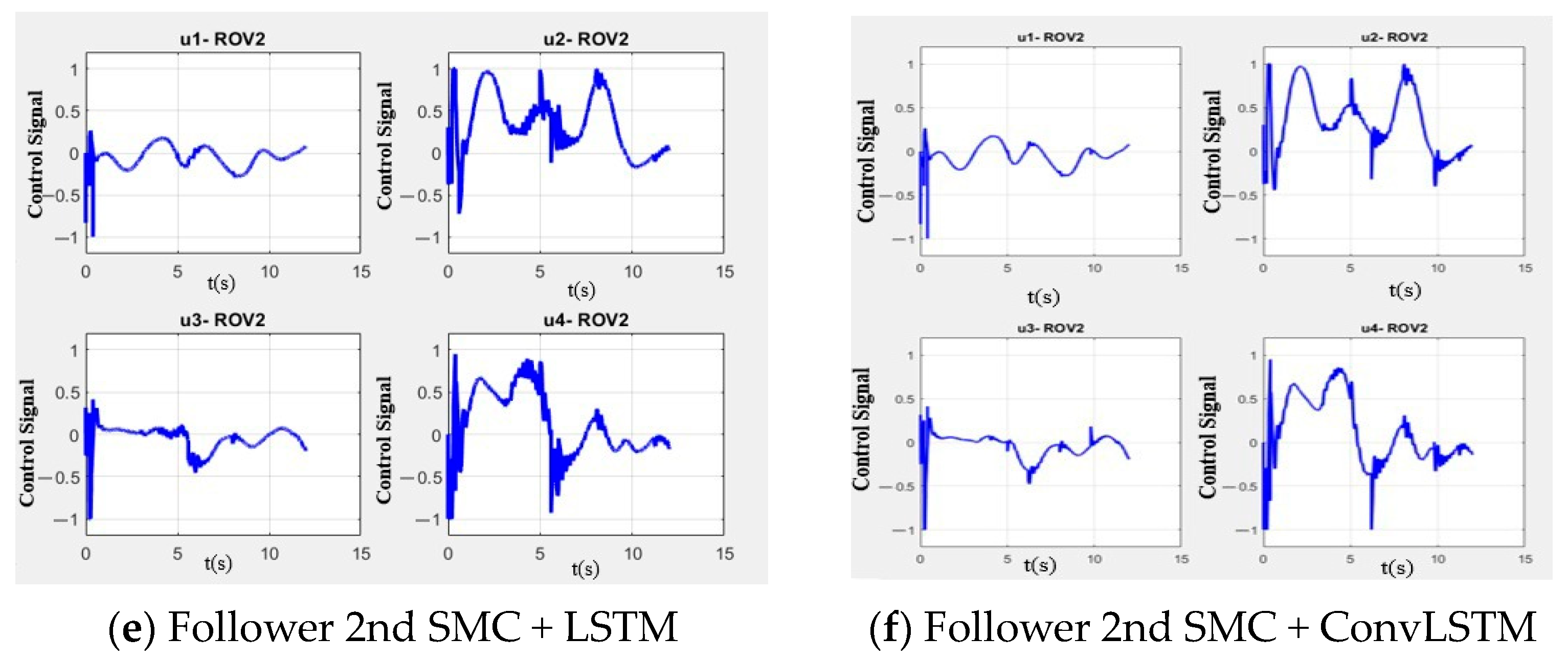
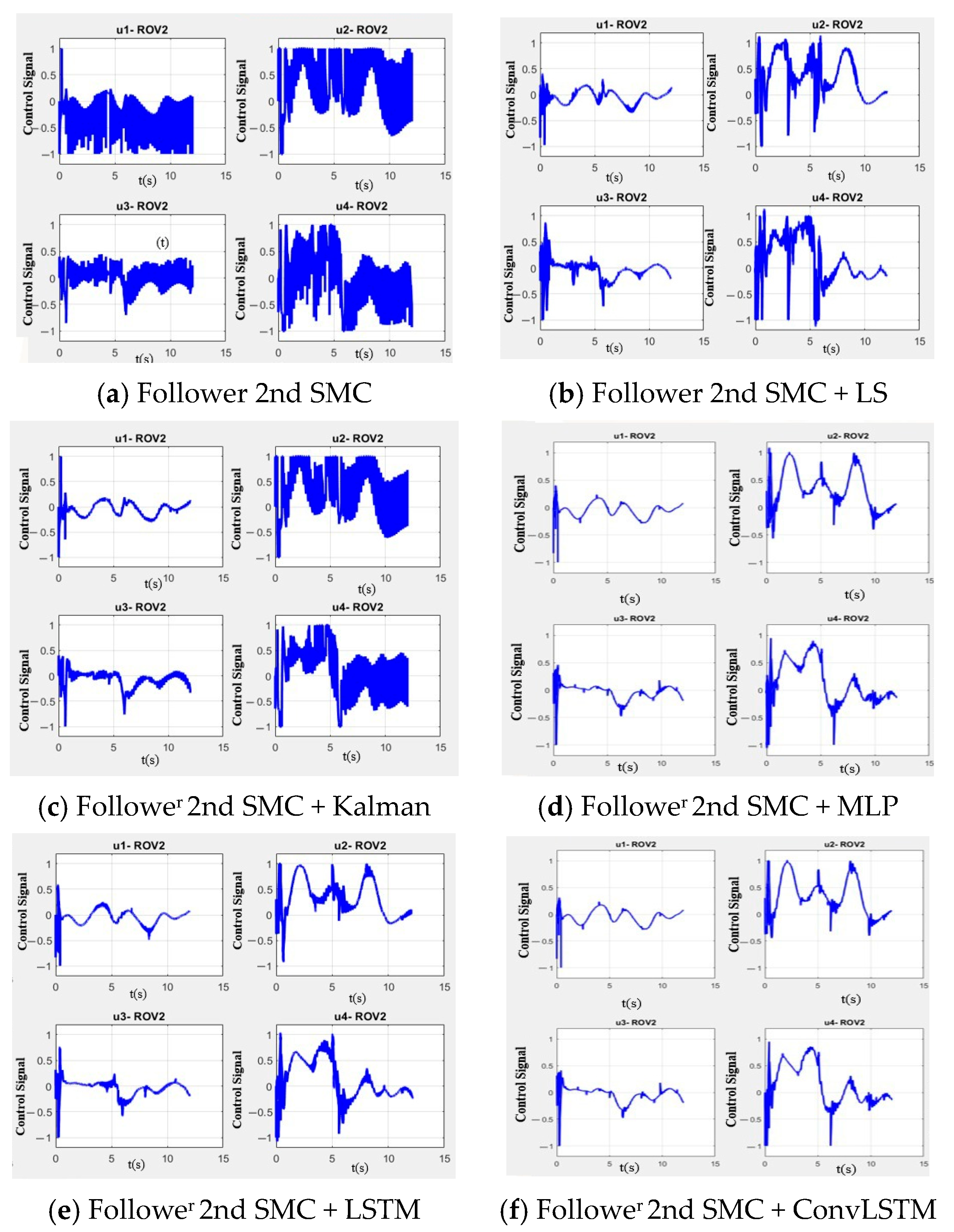
To analyze the performance of the proposed predictor in terms of energy consumption, the RMS (Root Mean Square) value of the control coefficients used for the thrusters was calculated. These values were averaged to provide a representative measure of energy consumption. The equation to calculate RMS is
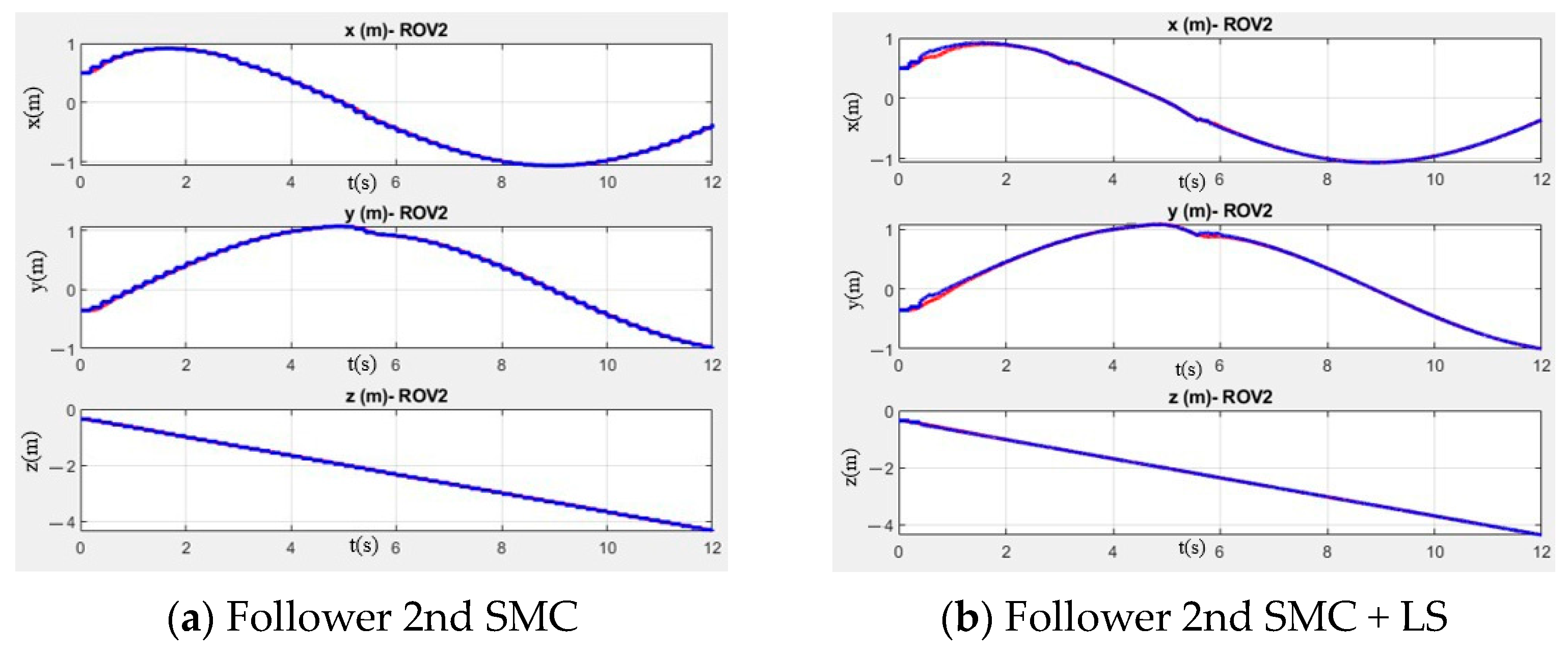
Simulation 1:
ROV1 is the leader and ROV2 is the follower;
The leader sensor has a 200 ms sampling period and there is no delay in data transmission between the leader and the follower;
Helical trajectory;
Leader–follower scheme;
Various predictors are proposed: LS, MLP, LSTM, ConvLSTM, and Kalman predictor.
Simulation 2:
The simulations ran the following characteristics:
ROV1 is the leader and ROV2 is the follower.
The leader sensor has a sampling period of 200 ms and the transmission of information from the leader to the follower has a delay of 200 ms (to choose these values, we ran preliminary tests modifying the sampling time, the delay, and the currents; it was found that at 200 ms, they can be affected in different conditions and achieve the desired values);
Helical trajectory;
Leader–follower scheme;
Various predictors are proposed: LS, MLP, LSTM, ConvLSTM, and Kalman predictor.
The objective of these simulations is to replicate communication using acoustic modems, with a latency and sensor sampling period of 200 ms, as illustrated in
Figure 8. The simulations aim to accurately model the transmission and reception processes involved in acoustic modem communication, highlighting their performance under specified latency conditions and sensor data sampling intervals.
3.1. Ocean Currents
For the analysis of the system, marine currents are considered, which are described in detail in the work of Fossen [
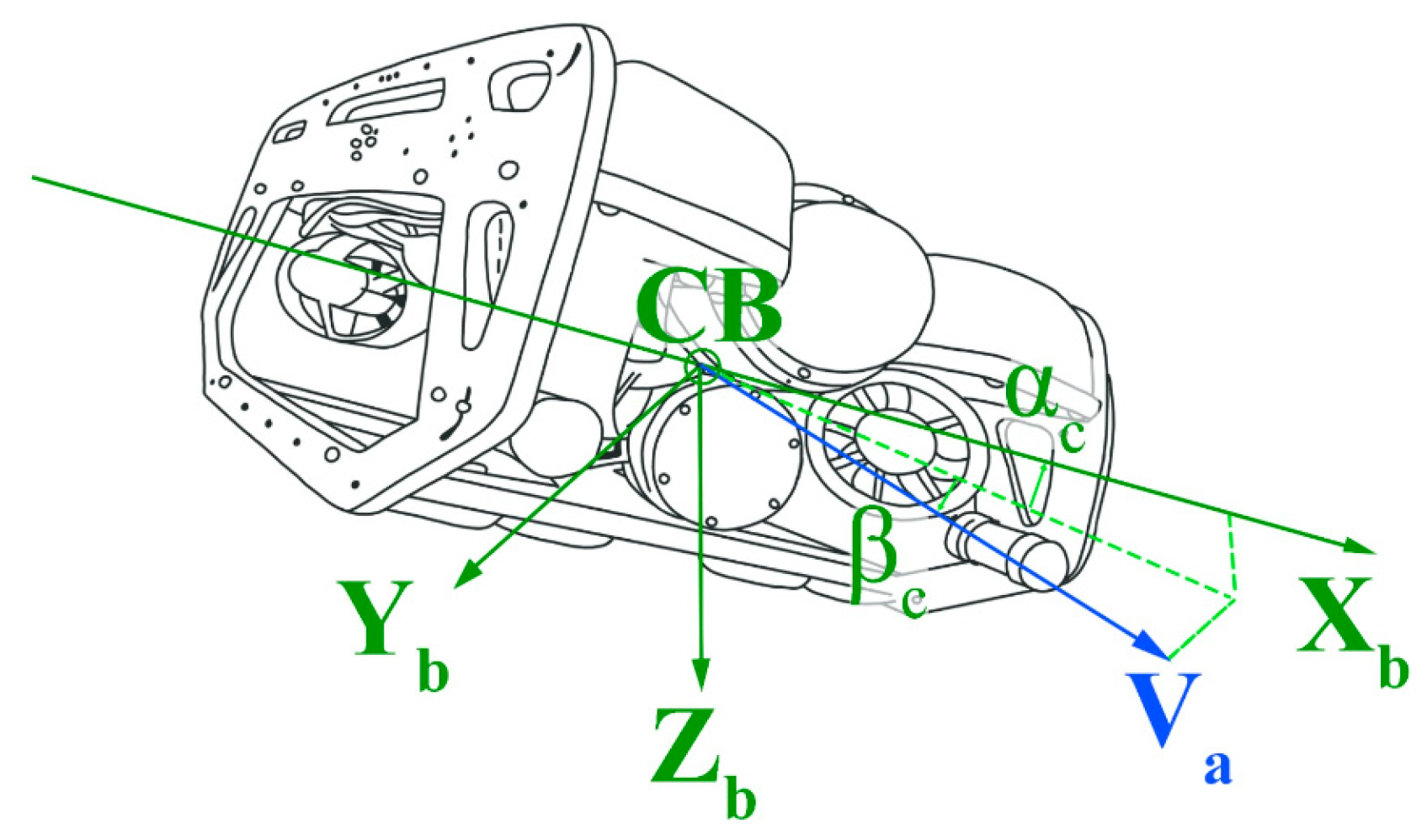
18]. It is assumed that these currents extend three-dimensionally and lack rotation, following the model proposed in said bibliographic reference.
where
The current velocity is identified as
while the relative orientation of the currents is described by the angles of attack
and slip angles
. In the specific context,
represents the current coming from the north,
is that coming from the east, and
is that arising from the depths, as illustrated in
Figure 9.
To optimize the appreciation of the advantages between the different simulations, we suggest varying the current triangles and to capture changes more accurately in the marine environment and the adaptive capacity of the proposed predictors.
The values of
) and
are established, with
= 1.2. By substituting these values into Equations (39)–(41), they are presented as follows:
3.2. Trajectory
The planned path will take a spiral shape (
Figure 10), as this involves changes in both positions and speeds along several axes, including forward motion, lateral displacement, ascent, and rotation. These positions, which must be controlled and monitored during movement, are defined by the coordinates
w is constant and
is the time of descent. Desired locations on the route will be identified as
, while desired speeds will be represented as
.
where
are the desired position and
is the desired angle.
Differentiating Equations (45)–(48) with respect to time gives
The values that were taken in the simulation are s y .
5. Conclusions
In this work, simulations of a leader–follower scheme were performed, considering scenarios with inefficient communication, latency, and sampling periods of the sensors, as well as including changing ocean currents. To compensate for communication problems, a ConvLSTM network was implemented to perform trajectory tracking in a leader–follower scheme. A second-order sliding-mode control law was implemented on both robots to ensure convergence to the desired trajectories. Numerical simulations were implemented to evaluate the performance of the proposed ConvLSTM predictor, which has not been used for collaborative testing due to ineffective communication. The performance of the proposed network was compared with conventional and intelligent predictors. The predictors used for the comparison in this work are the Kalman filter, recursive least squares (LS), MLP, and LSTM. In the first simulations, having only a sampling period of 200 ms and the influence of currents, the data showed an improvement in trajectory tracking of 12.9% of the ConvLSTM network. In the second simulation, where the effect of communication latency is also considered, an improvement of 13.9% in trajectory tracking was obtained with the proposed network. Therefore, it presents a good capacity of the ConvLSTM network to significantly optimize performance and stability in collaborative operations between ROVs, especially in changing underwater environments. In addition, improved trajectory tracking reduces oscillations, which also reduces wear and damage to the motors.
In future research, new variables could be incorporated that could affect the communication between ROVs:
These variables include environmental factors such as water pressure, temperature, and salinity or the consideration of information losses during transmission;
The possibility of obstacles that could interfere with communication;
Evaluating how increasing the number of ROVs could influence communication effectiveness;
Exploring these additional variables could provide a more complete understanding of the challenges and potential solutions in underwater communication between ROVs.



 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}