
Optimized Hydrodynamic Design for Autonomous Underwater Vehicles



Abstract
1. Introduction
2. Hydrodynamic Parameter Calculations
2.1. Validation of Numerical Methods
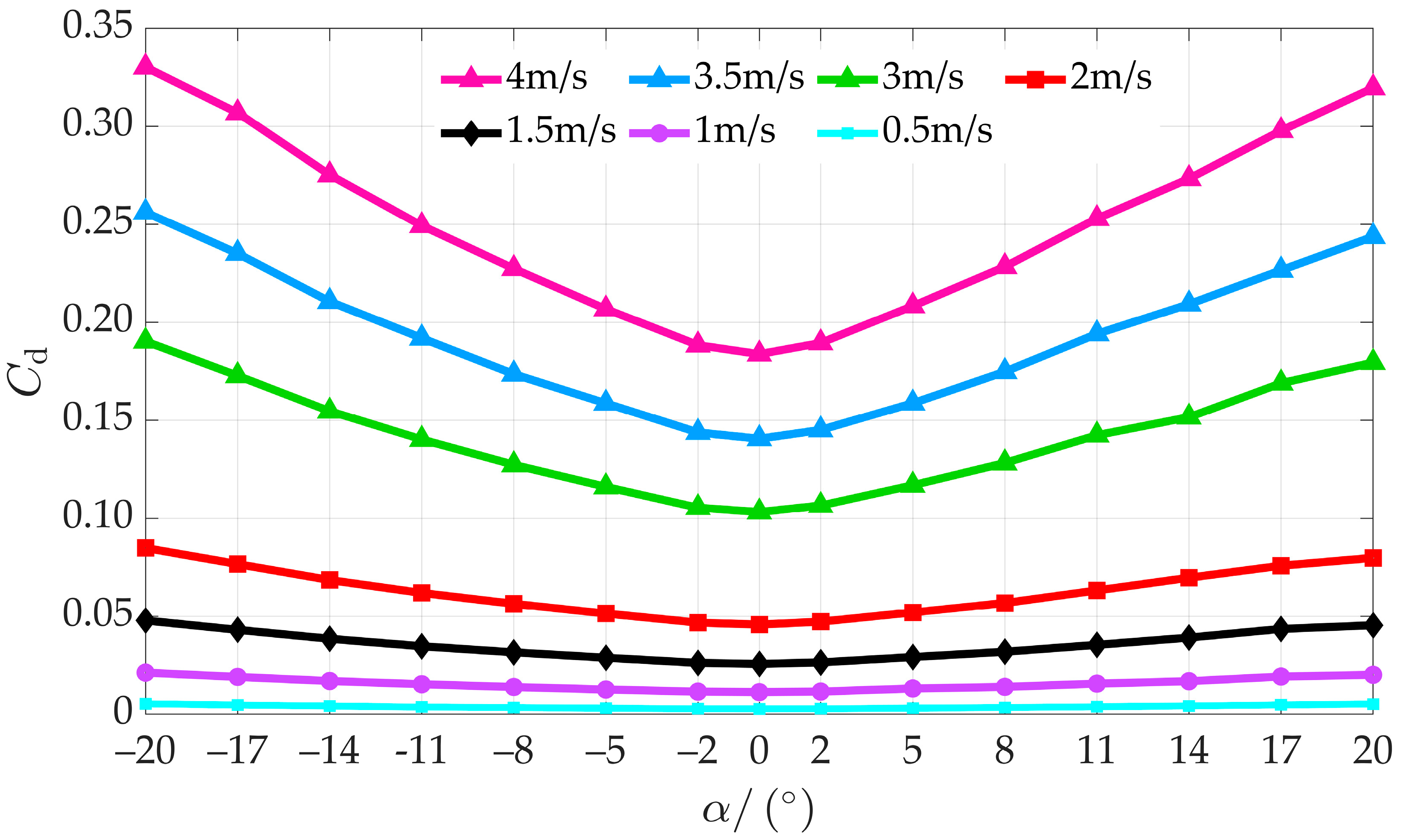
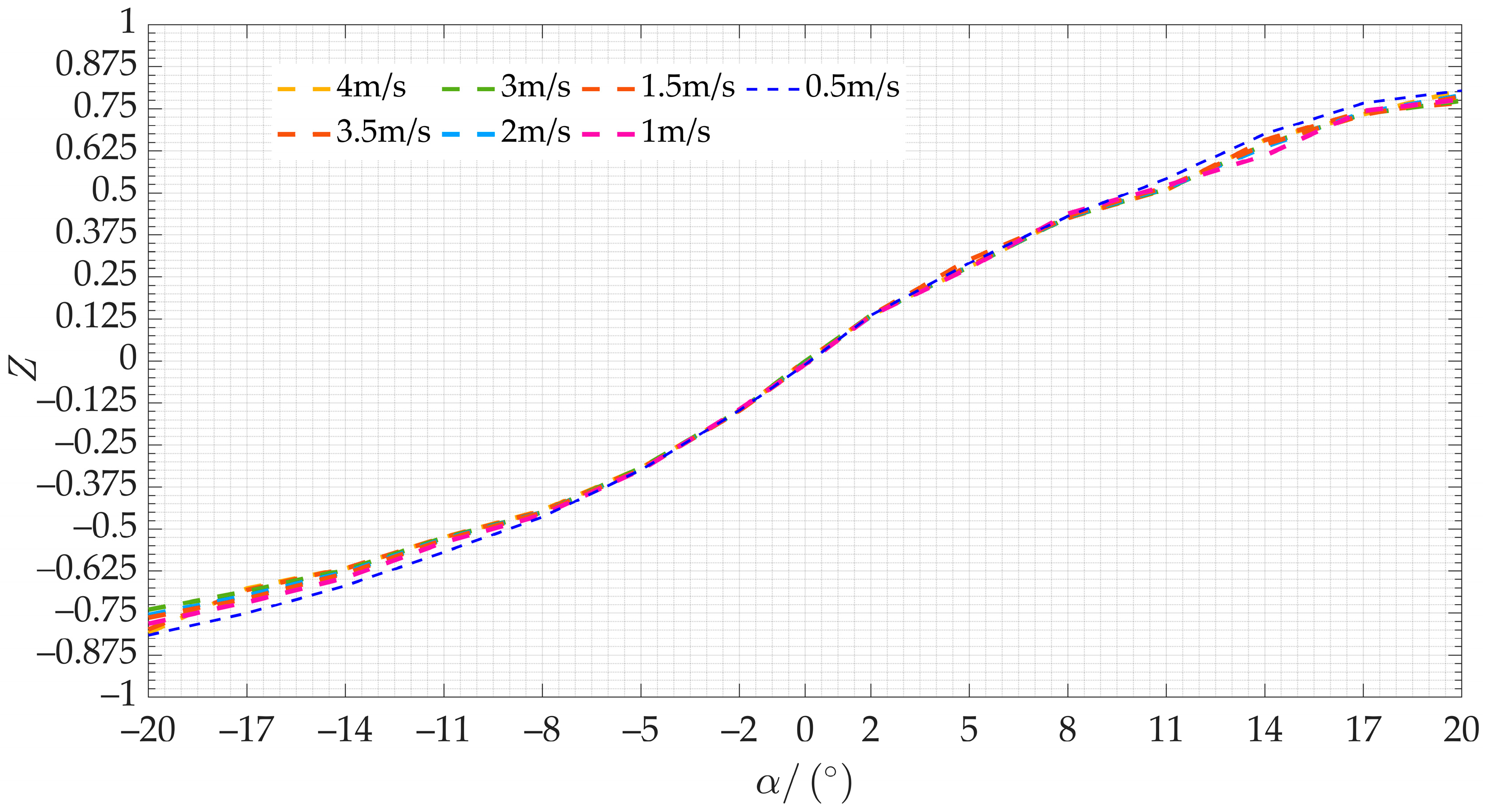
2.2. Numerical Calculations and Analysis of Results
- Global Computational Domain: simulating the ocean environment using a 16 L × 10 L × 10 L cuboid region;
- Local Computational Domain: modeling the AUV’s position as a 5 L diameter sphere, with the center of buoyancy set as the sphere’s center.
- Inlet: defined as a uniform velocity inlet, simulating seawater at 15 °C (density 1026 kg/m3, dynamic viscosity 0.0009 Pa·s);
- Outlet: set as a pressure outlet with a pressure of 0 Pa;
- AUV Surface: treated as a no-slip wall;
- Computational Domain Boundaries (Far-field): assigned specified pressure gradient boundary conditions.
3. Optimization Analysis
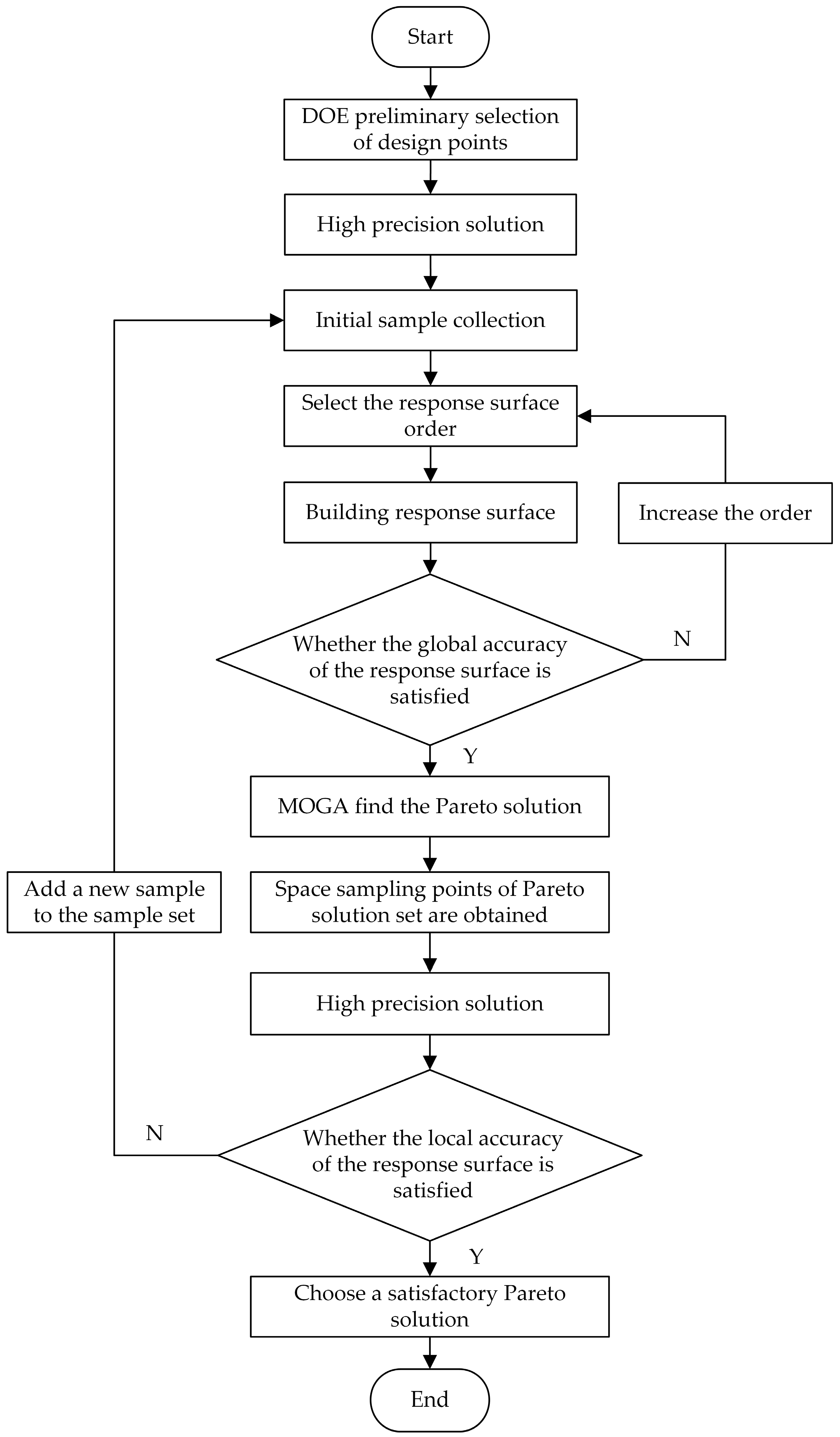
3.1. Optimization of Design Methods
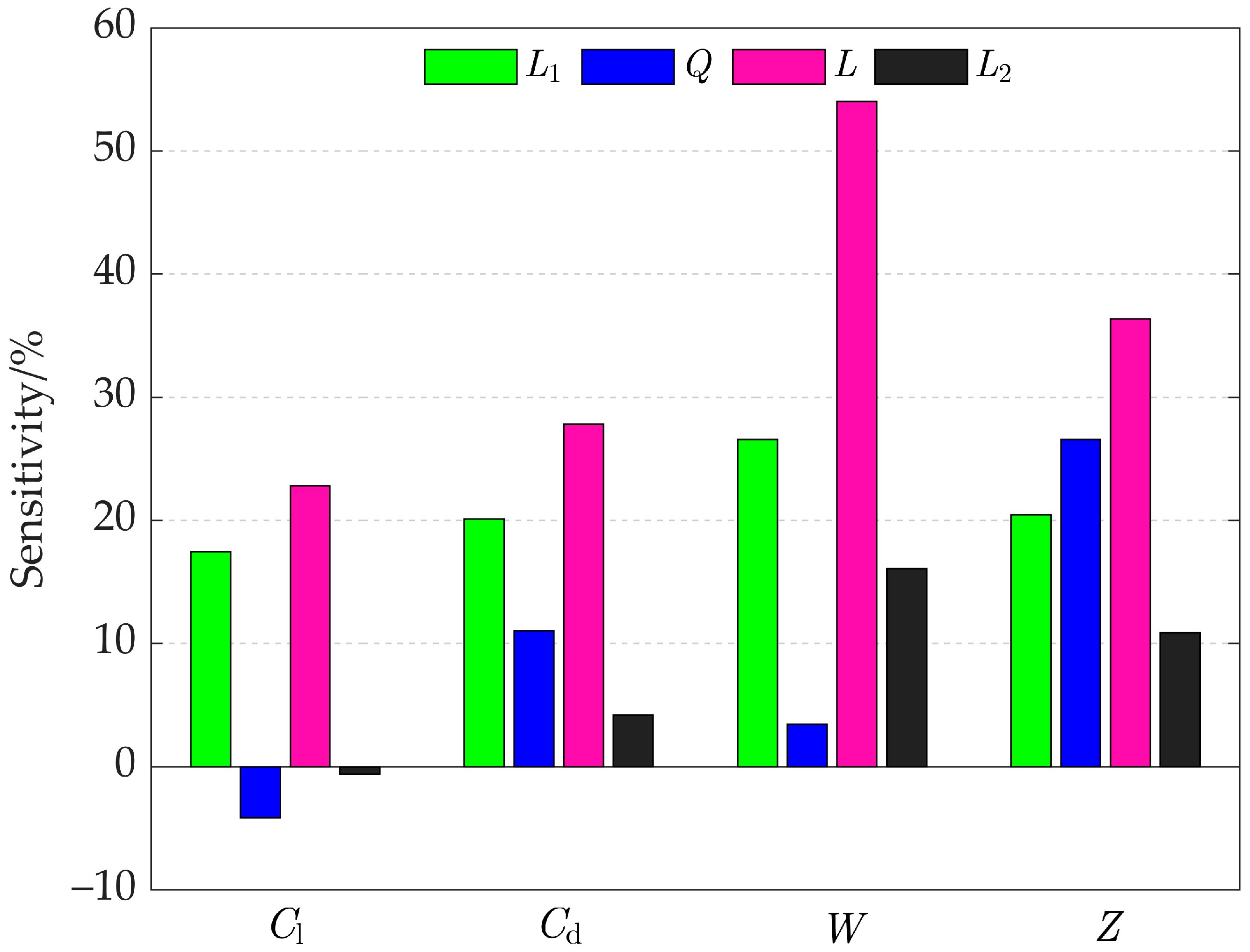
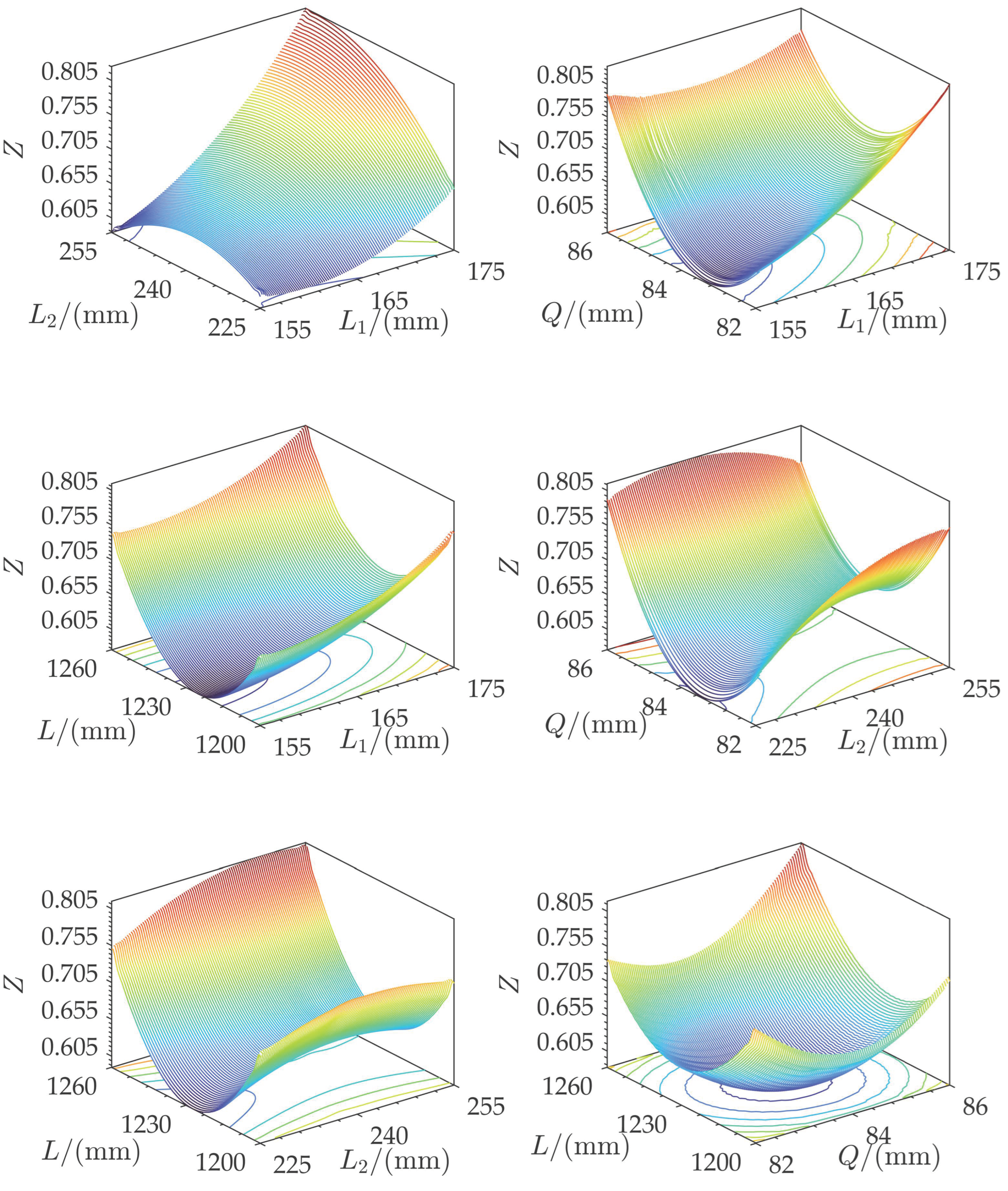
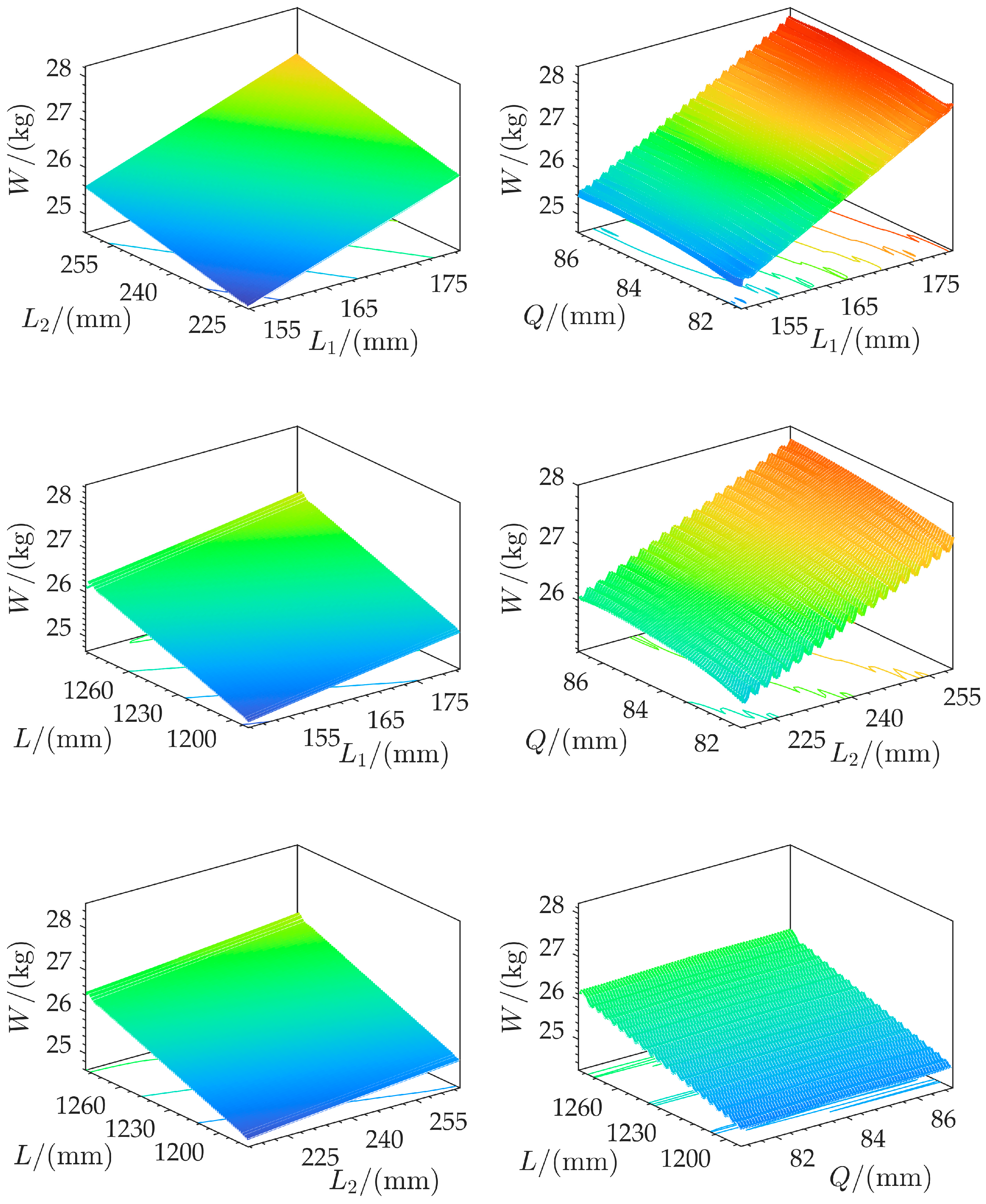
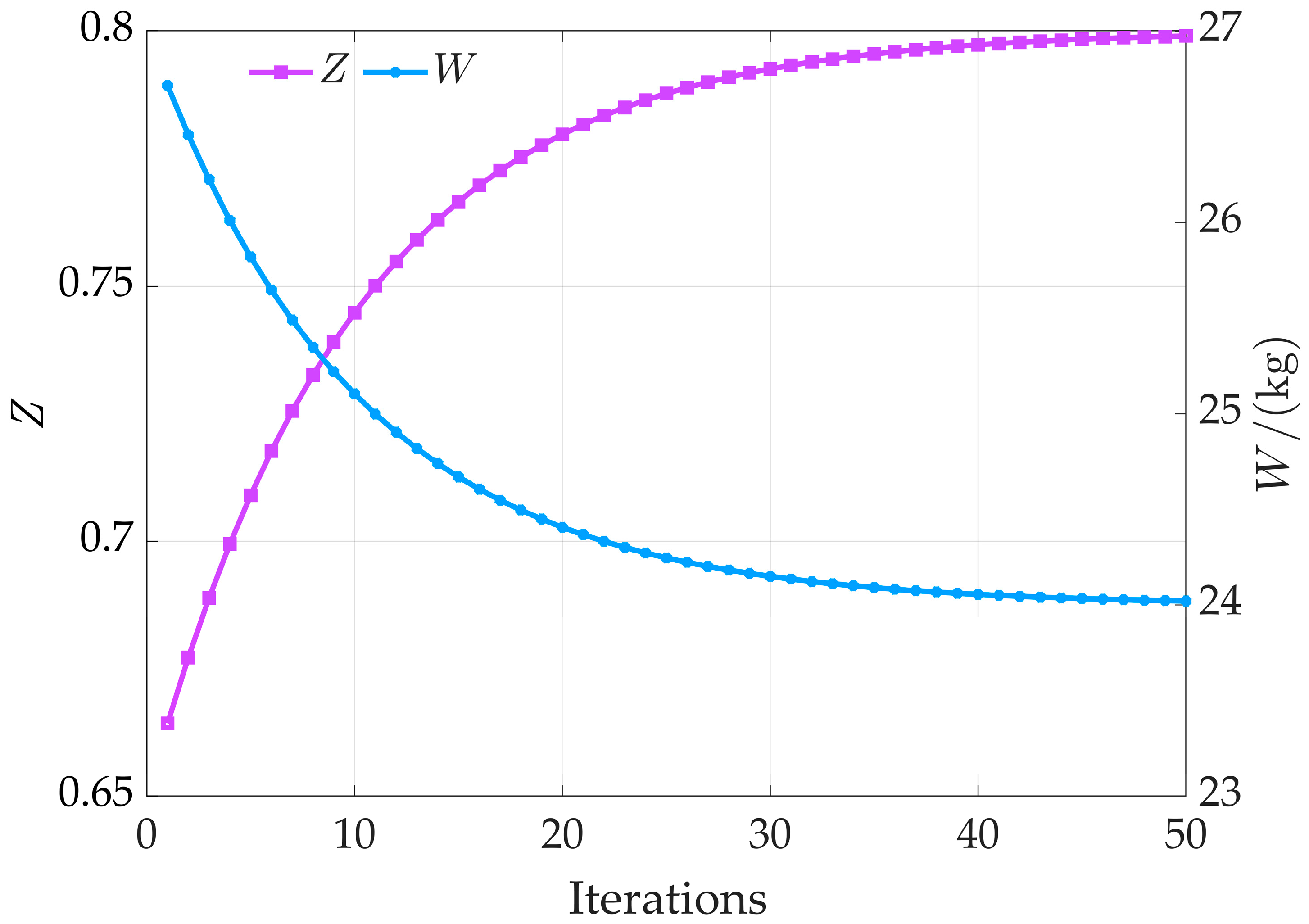
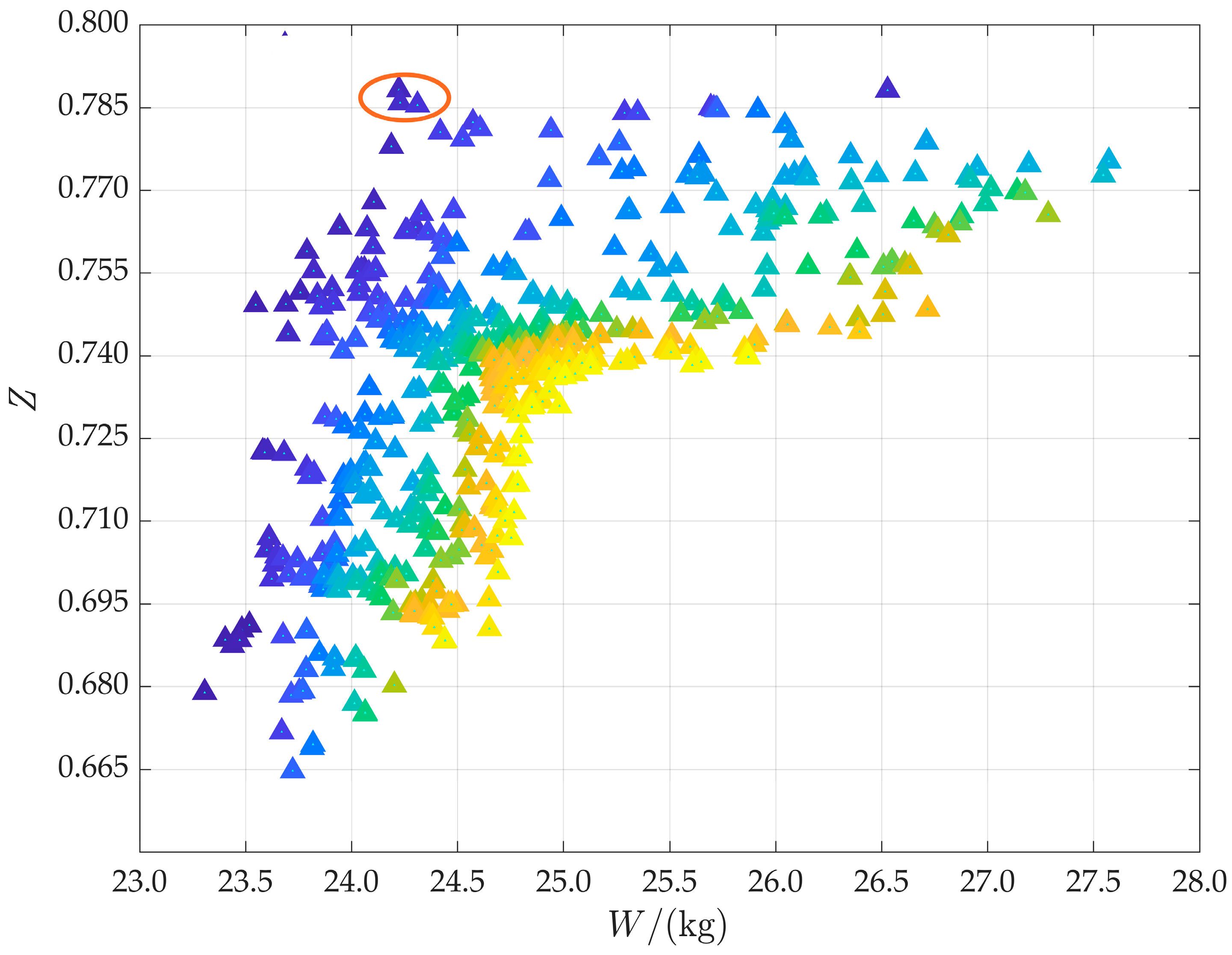
3.2. Multi-Objective Genetic Algorithm and Result Analysis
4. Conclusions
- Dynamic Stability: The current optimization does not incorporate dynamic stability considerations. Future studies should integrate dynamic stability analysis to ensure that the optimized design maintains stable motion across various operating conditions;
- Performance in Varied Flow Conditions: The AUV’s performance under different flow conditions, such as varying flow velocities and directions, should be examined. Numerical simulations and experimental tests can help validate the robustness of the optimized design;
- Experimental Validation: This study primarily relies on numerical simulations to confirm the optimization results. However, practical experiments are essential for evaluating the AUV’s real-world performance. Future work should include experimental validation in a towing tank or open-water environment to verify numerical predictions and enhance the design’s reliability.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hong, L.; Wang, X.; Zhang, D.-S. CFD-Based Hydrodynamic Performance Investigation of Autonomous Underwater Vehicles: A Survey. Ocean Eng. 2024, 305, 117911. [Google Scholar] [CrossRef]
- Alvarez, A.; Bertram, V.; Gualdesi, L. Hull Hydrodynamic Optimization of Autonomous Underwater Vehicles Operating at Snorkeling Depth. Ocean Eng. 2009, 36, 105–112. [Google Scholar] [CrossRef]
- Sun, T.; Chen, G.; Yang, S.; Wang, Y.; Wang, Y.; Tan, H.; Zhang, L. Design and Optimization of a Bio-Inspired Hull Shape for AUV by Surrogate Model Technology. Eng. Appl. Comput. Fluid Mech. 2021, 15, 1057–1074. [Google Scholar] [CrossRef]
- Gao, T.; Wang, Y.; Pang, Y.; Cao, J. Hull Shape Optimization for Autonomous Underwater Vehicles Using CFD. Eng. Appl. Comput. Fluid Mech. 2016, 10, 599–607. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, J.; Zhang, A.; Wang, Y.; Zhao, W. Parametric Geometric Model and Hydrodynamic Shape Optimization of a Flying-Wing Structure Underwater Glider. China Ocean Eng. 2017, 31, 709–715. [Google Scholar] [CrossRef]
- Yang, M.; Wang, Y.; Yang, S.; Zhang, L.; Deng, J. Shape Optimization of Underwater Glider Based on Approximate Model Technology. Appl. Ocean Res. 2021, 110, 102580. [Google Scholar] [CrossRef]
- Li, T.; Wang, P.; Sun, B.; Li, C. A Shape Optimization Design Method of the Joined-Wing Underwater Glider. J. Harbin Inst. Technol. 2019, 51, 26–32. [Google Scholar]
- Zhang, D.; Wang, Z.; Ling, H.; Zhu, X. Kriging-Based Shape Optimization Framework for Blended-Wing-Body Underwater Glider with NURBS-Based Parametrization. Ocean Eng. 2021, 219, 108212. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, B.; Wang, Z.; Ling, H.; Zhang, L. Optimal Design of Hydrodynamic and Shape of Blended-Wing-Body Underwater Glider. Ship Eng. 2021, 43, 117–123. [Google Scholar]
- Wang, X.; Song, B.; Wang, P.; Sun, C. Hydrofoil Optimization of Underwater Glider Using Free-Form Deformation and Surrogate-Based Optimization. Int. J. Nav. Archit. Ocean Eng. 2018, 10, 730–740. [Google Scholar] [CrossRef]
- Rostamzadeh-Renani, M.; Rostamzadeh-Renani, R.; Baghoolizadeh, M.; Khabazian Azarkhavarani, N. The Effect of Vortex Generators on the Hydrodynamic Performance of a Submarine at a High Angle of Attack Using a Multi-Objective Optimization and Computational Fluid Dynamics. Ocean Eng. 2023, 282, 114932. [Google Scholar] [CrossRef]
- Rostamzadeh-Renani, M.; Baghoolizadeh, M.; Sajadi, S.M.; Rostamzadeh-Renani, R.; Azarkhavarani, N.K.; Salahshour, S.; Toghraie, D. A Multi-Objective and CFD Based Optimization of Roof-Flap Geometry and Position for Simultaneous Drag and Lift Reduction. Prop. Power Res. 2024, 13, 26–45. [Google Scholar] [CrossRef]
- Rostamzadeh-Renani, M.; Baghoolizadeh, M.; Rostamzadeh-Renani, R.; Toghraie, D.; Ahmadi, B. The Effect of Canard’s Optimum Geometric Design on Wake Control Behind the Car Using Artificial Neural Network and Genetic Algorithm. ISA Trans. 2022, 131, 427–443. [Google Scholar] [CrossRef] [PubMed]
- Baghoolizadeh, M.; Jasim, D.J.; Sajadi, S.M.; Renani, R.R.-; Renani, M.R.-; Hekmatifar, M. Using of Artificial Neural Networks and Different Evolutionary Algorithms to Predict the Viscosity and Thermal Conductivity of Silica-Alumina-MWCN/Water Nanofluid. Heliyon 2024, 10, e26279. [Google Scholar] [CrossRef]
- Yang, L. Research on Design and Hydrodynamic Performance of “SEAGULL” Underwater Glider. Ph.D. Dissertation, Shanghai Jiao Tong University, Shanghai, China, 2017. [Google Scholar]
- Chen, L.; Liu, R.; Guo, R.; Zhao, B.; Liu, L.; Yang, Y. Multi-Objective Optimization on Aerodynamic Shape of Projectile with Twisted Empennages. Acta Armamentar. 2016, 37, 1187–1193. [Google Scholar]
- Zhu, H.; Liu, L.; Long, T.; Zhao, J. Global Optimization Method Using SLE and Adaptive RBF Based on Fuzzy Clustering. Chin. J. Mech. Eng. 2012, 25, 768–775. [Google Scholar] [CrossRef]
- Pei, J.; Wang, W.; Yuan, S.; Zhang, J. Optimization on the Impeller of a Low-Specific-Speed Centrifugal Pump for Hydraulic Performance Improvement. Chin. J. Mech. Eng. 2016, 29, 992–1002. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, Q.; Zhao, X.; Liu, Y.; Wang, G. Multi-Objective Optimization of Inlet Duct of Water-Jet Propulsion Based on Response Surface Method. Acta Armamentar. 2020, 41, 2071–2080. [Google Scholar]
- Jackson, I.R.H. Convergence Properties of Radial Basis Functions. Constr. Approx. 1988, 4, 243–264. [Google Scholar] [CrossRef]
- Yang, Z.; Song, L. Integrated Design of Resistance and Manoeuvring Performances for Submersible Based on MOGA. J. Ship Mech. 2015, 19, 526–533. [Google Scholar]
- Qian, L.; Chang, S.; Ni, Y. Multi-Objective Optimization of Aerodynamic Shape of Microspoiler for Spin-Stabilized Projectile. Acta Armamentar. 2021, 42, 2575–2585. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| total mass of the vehicle | 35.52 kg | |
| total length | 1725 mm | |
| maximum diameter | 178 mm | |
| drainage volume | 34.5 dm3 | |
| length of bow section | 165 mm | |
| length of stern section | 245 mm | |
| length of middle section | L | 1235 mm |
| maximum speed | 3.5 m/s |
| Target Variables | R2 | σ |
|---|---|---|
| Z | 0.967 | 0.053 |
| W | 0.992 | 0.005 |
| Parameters | σ |
|---|---|
| percentage of convergence stabilization | 100% |
| maximum allowable Pareto percentage | 75% |
| crossover rate | 0.9 |
| variation rate | 0.1 |
| Title | Z | W/kg | /mm | /mm | Q/mm | L/mm |
|---|---|---|---|---|---|---|
| optimization point 1 | 0.788 | 24.06 | 174.5 | 227.4 | 85.1 | 1203.4 |
| optimization point 2 | 0.787 | 24.11 | 173.1 | 227.9 | 85.6 | 1208.3 |
| optimization point 3 | 0.786 | 24.28 | 170.9 | 229.1 | 86.6 | 1212.1 |
| Title | Z | W/kg | /mm | Q/mm | L/mm | |
|---|---|---|---|---|---|---|
| result before optimization | 0.684 | 26.6 | 165 | 245 | 84 | 1235 |
| optimized results | 0.788 | 24.06 | 174.5 | 227.4 | 85.1 | 1203.4 |
| Title | Optimal Value | Calculated Value | Relative Error |
|---|---|---|---|
| optimization point 1 | 0.788 | 0.778 | 1.269% |
| optimization point 2 | 0.787 | 0.776 | 1.397% |
| optimization point 3 | 0.786 | 0.775 | 1.399% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, G.; Liu, X.; Hao, Y.; Yin, G.; He, L. Optimized Hydrodynamic Design for Autonomous Underwater Vehicles. Machines 2025, 13, 194. https://doi.org/10.3390/machines13030194
Fan G, Liu X, Hao Y, Yin G, He L. Optimized Hydrodynamic Design for Autonomous Underwater Vehicles. Machines. 2025; 13(3):194. https://doi.org/10.3390/machines13030194
Chicago/Turabian StyleFan, Gang, Xiaojin Liu, Yanan Hao, Guoling Yin, and Long He. 2025. "Optimized Hydrodynamic Design for Autonomous Underwater Vehicles" Machines 13, no. 3: 194. https://doi.org/10.3390/machines13030194
APA StyleFan, G., Liu, X., Hao, Y., Yin, G., & He, L. (2025). Optimized Hydrodynamic Design for Autonomous Underwater Vehicles. Machines, 13(3), 194. https://doi.org/10.3390/machines13030194