
Research on Structure Design and Control Method of Magnetorheological Suspension Based on Improved Fruit Fly Optimization Algorithm



Abstract
:1. Introduction
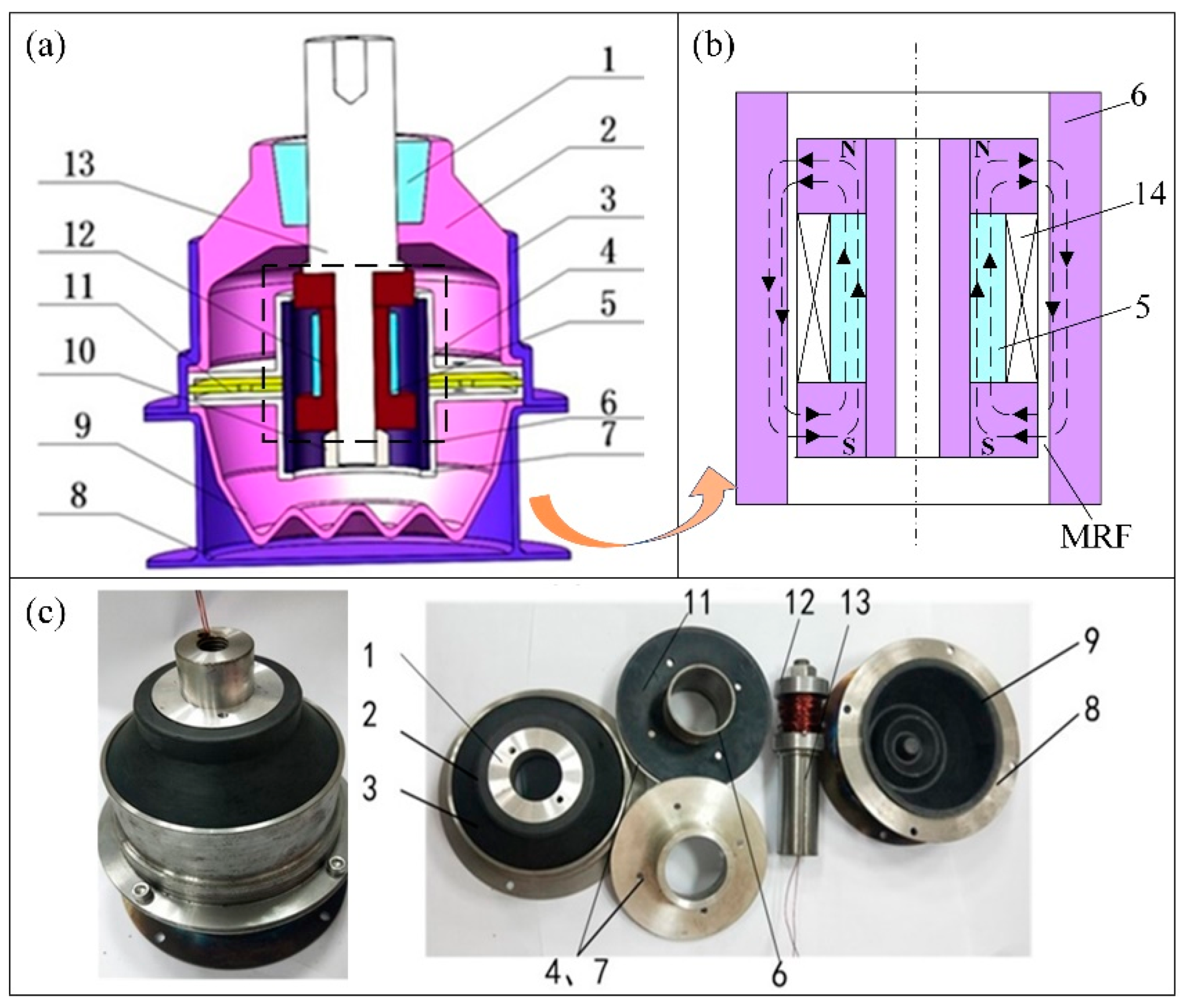
2. Structure Design and Magnetic Field Simulation of Magnetorheological Suspension
2.1. Structure Design of Magnetorheological Suspension
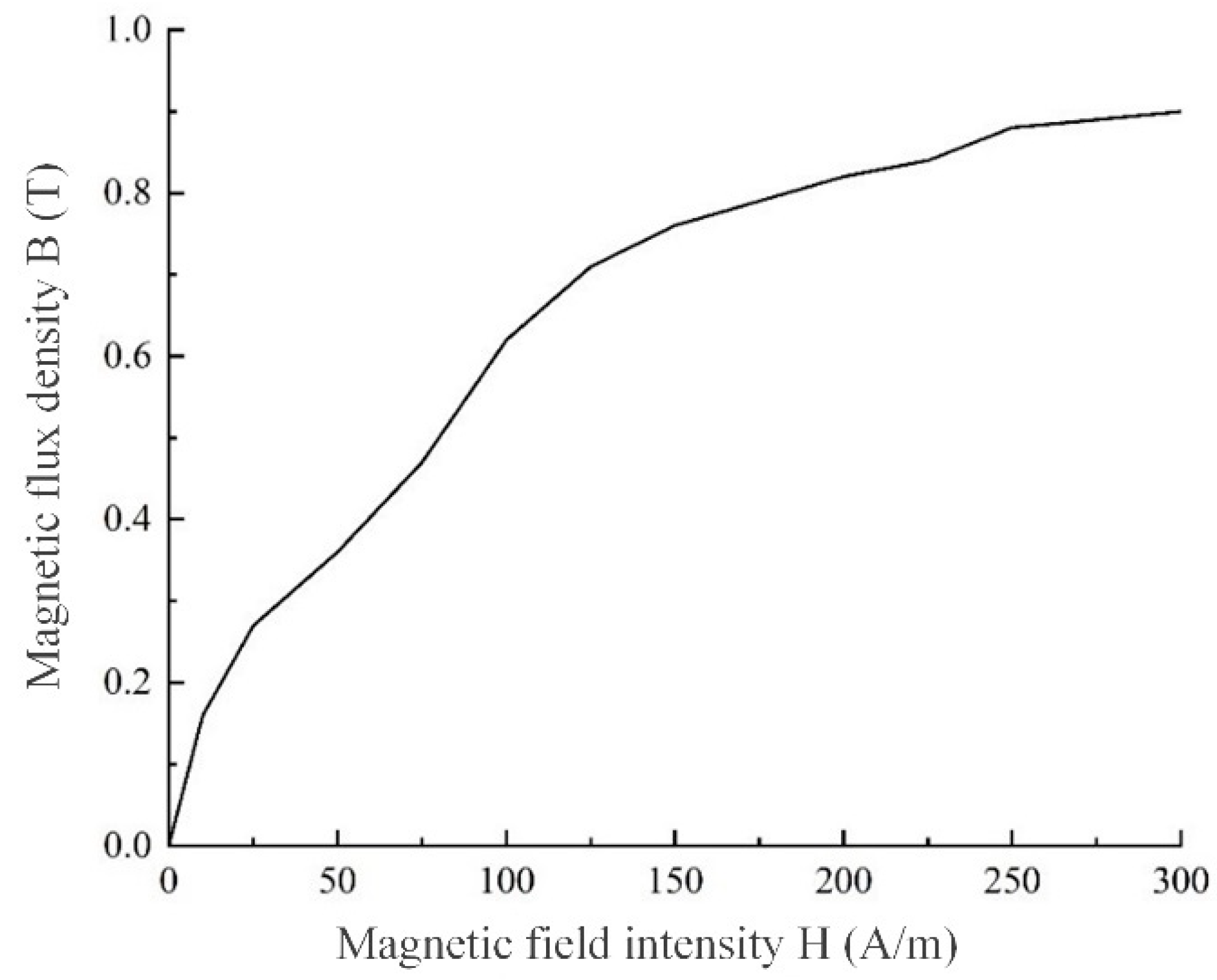
2.2. Simulation of Magnetic Field of Magnetorheological Suspension
3. Dynamic Modeling and Control Algorithm of Magnetorheological Suspension
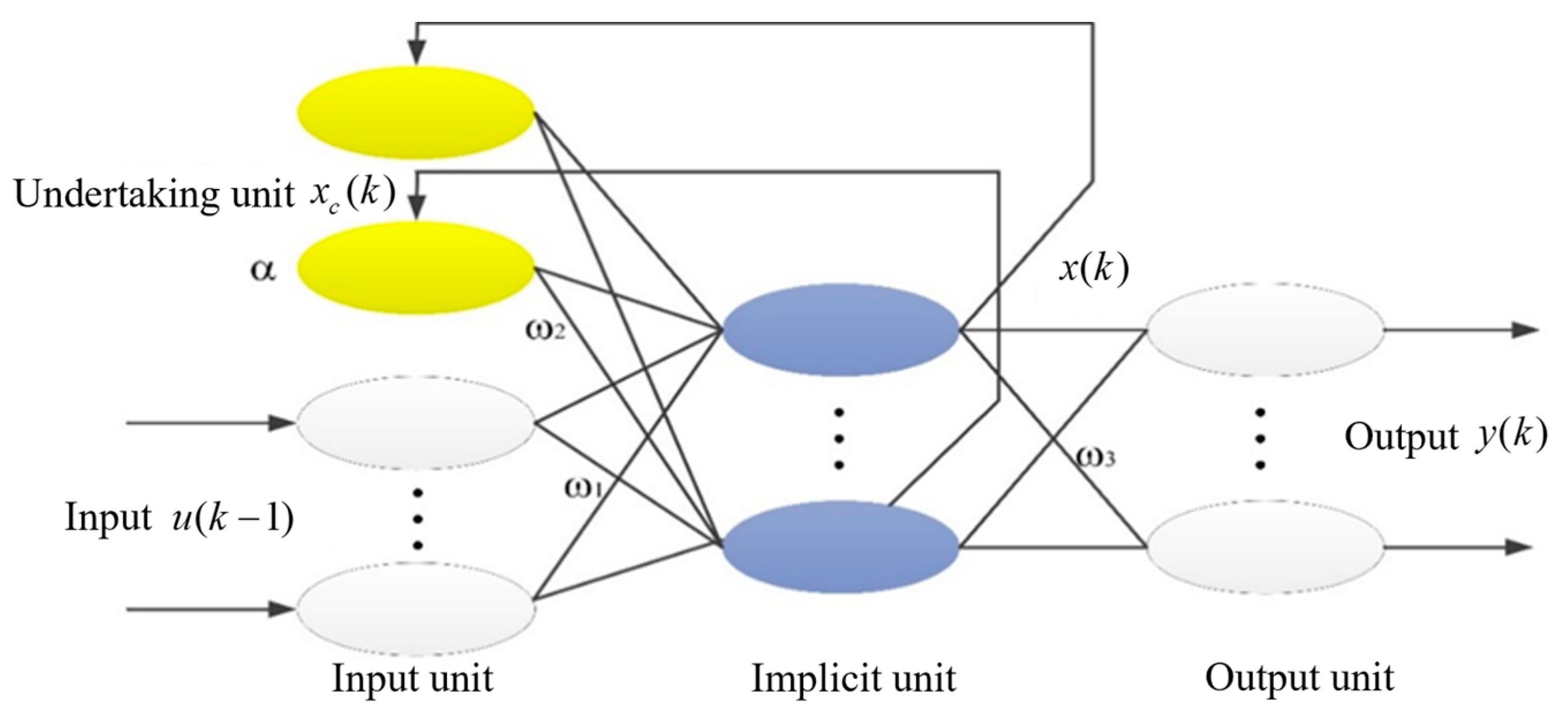
3.1. Elman Neural Network
3.2. Modeling Results and Analysis of Suspension Positive Model
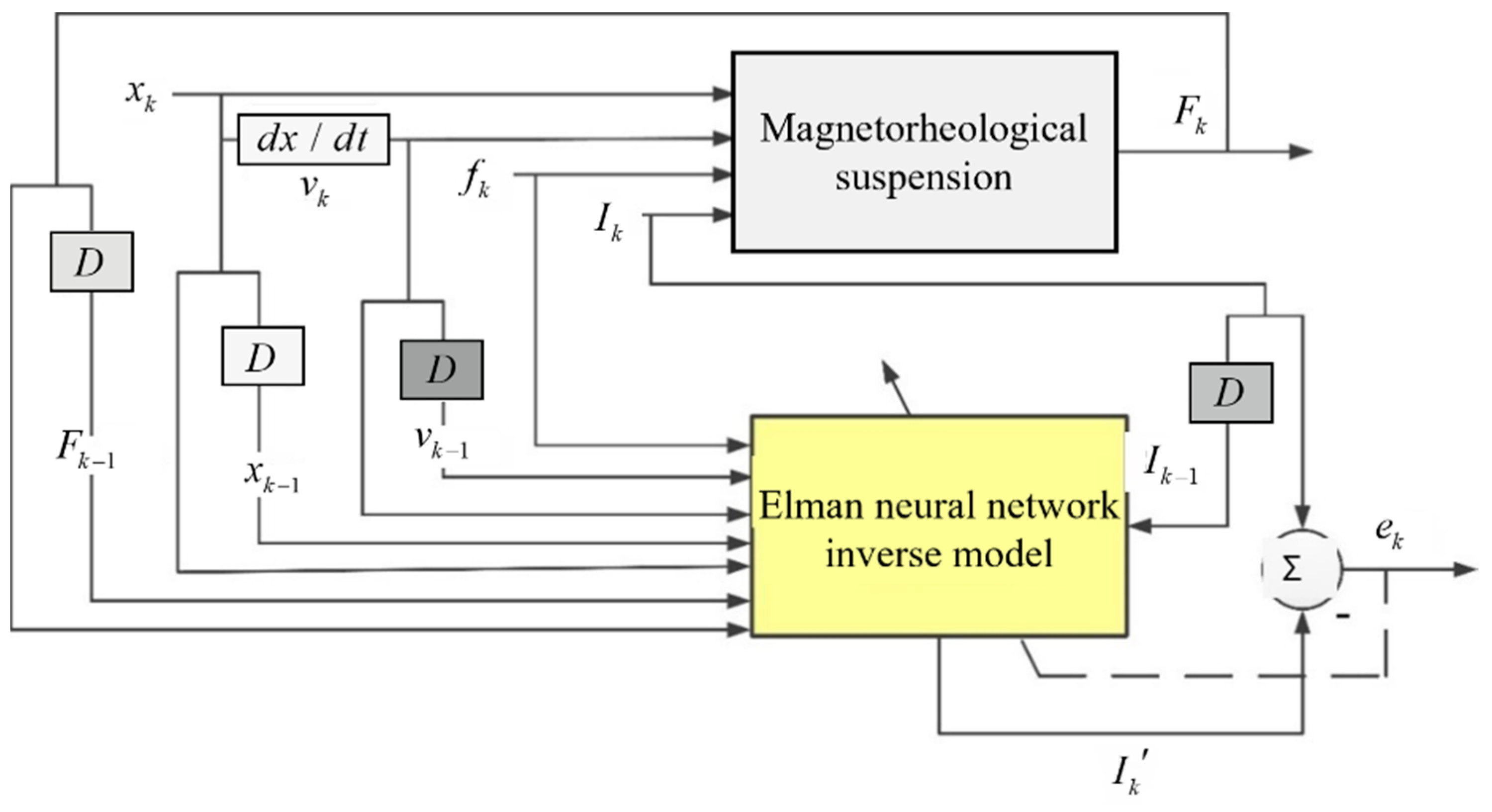
3.3. Modeling Results and Analysis of Suspension Inverse Model
3.4. Neural Network PID Algorithm
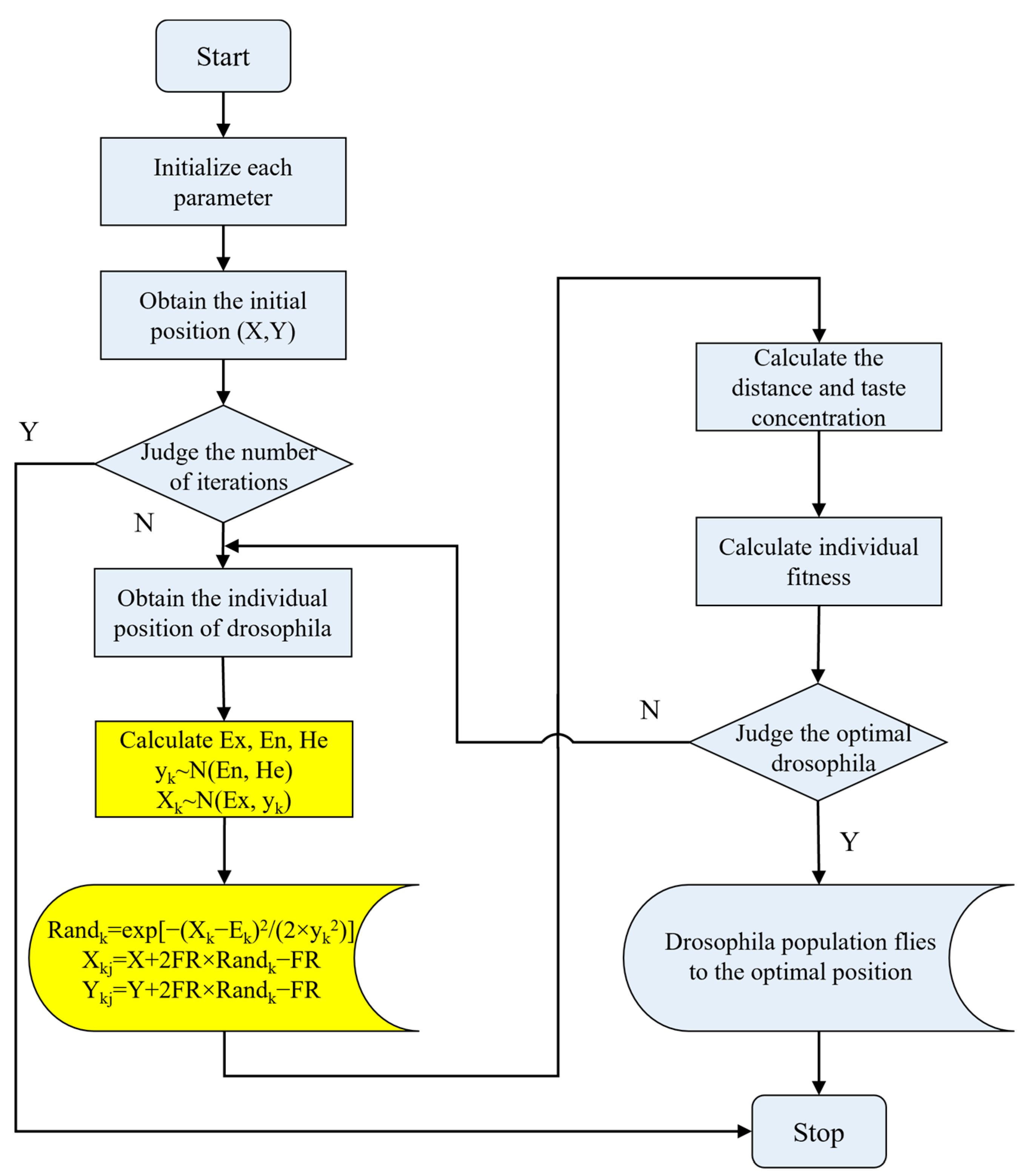
3.5. Improved Fruit Fly Optimization Algorithm
4. Simulation Analysis and Experimental Verification
4.1. Establishment of Simulation Module of Magnetorheological Suspension
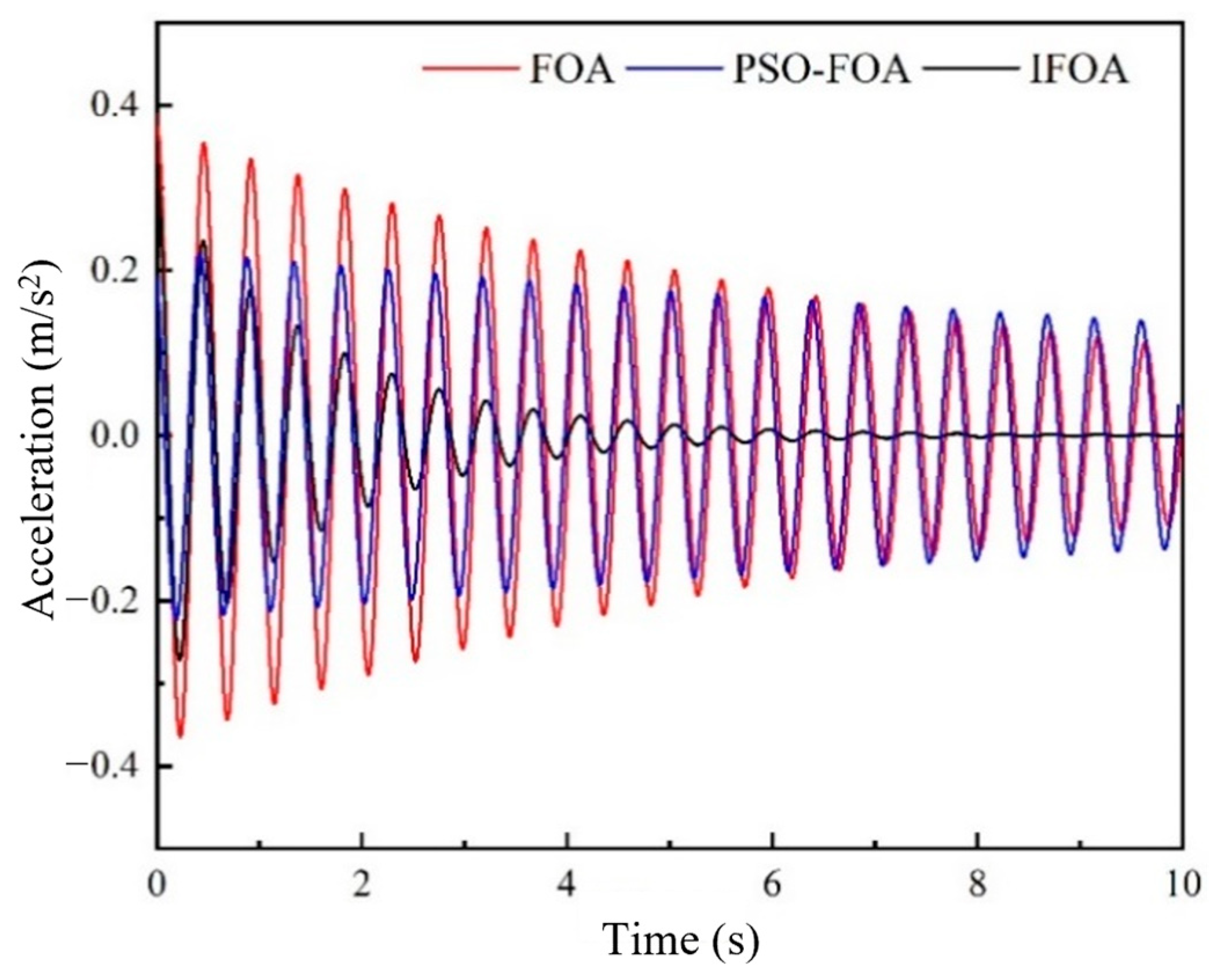
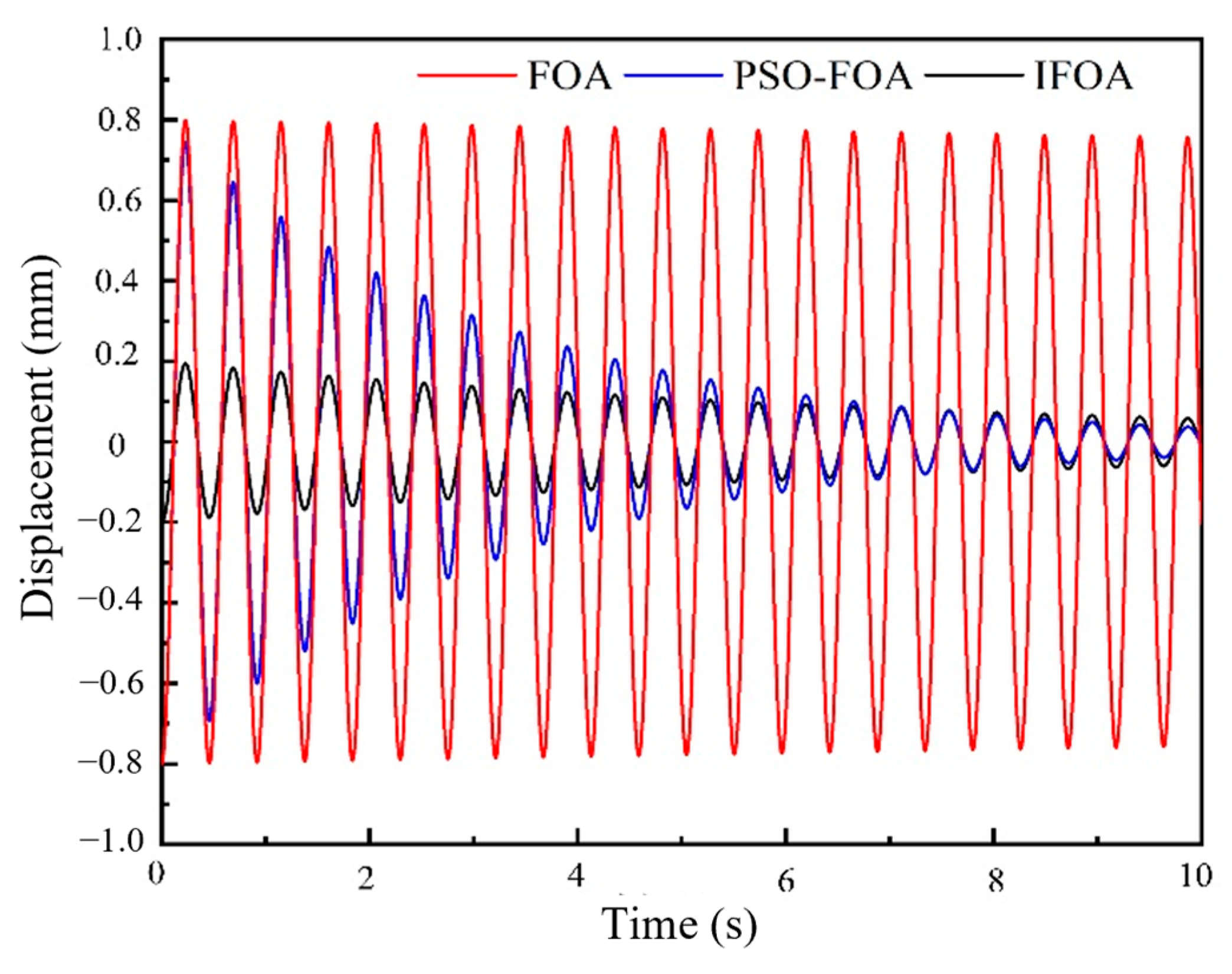
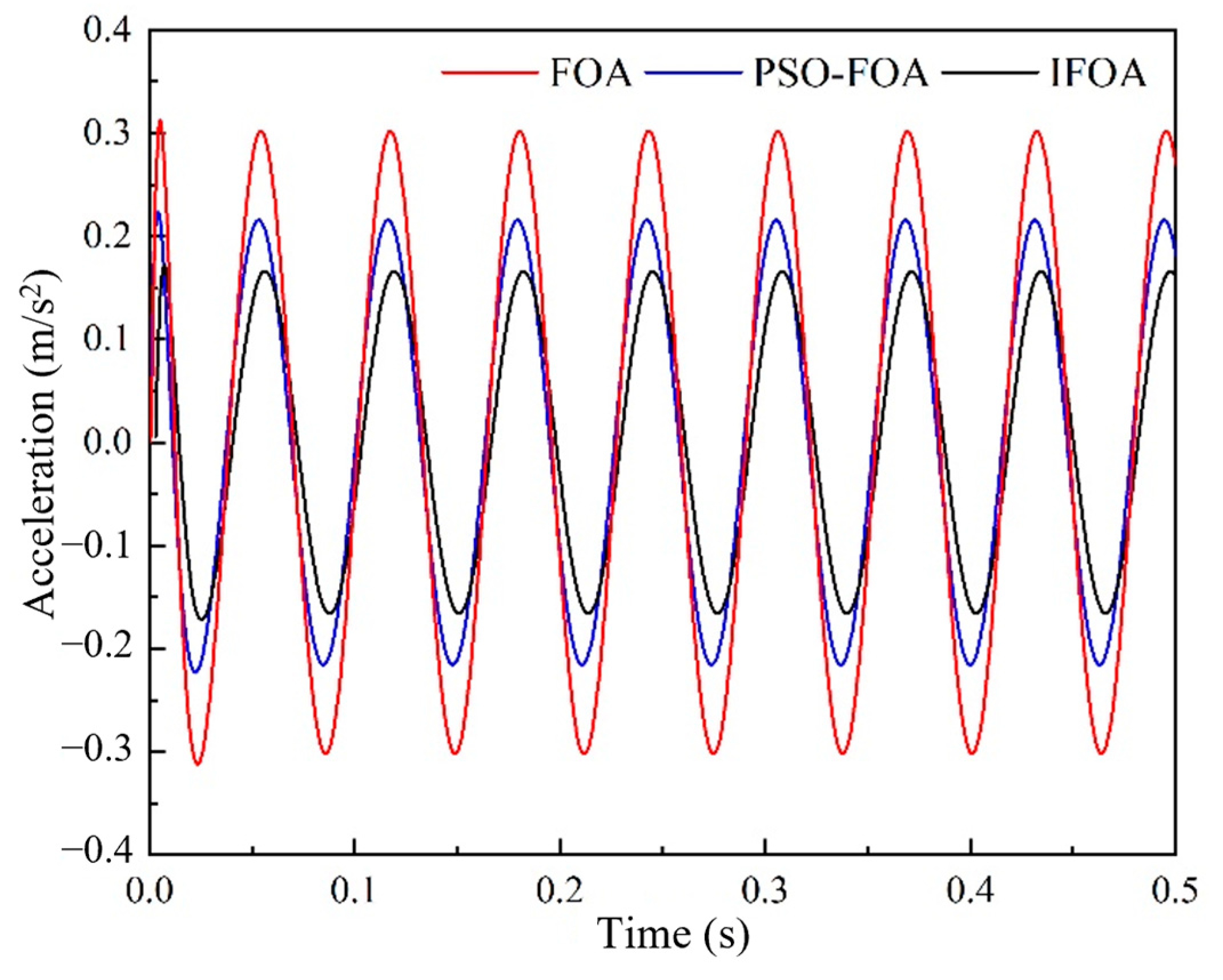
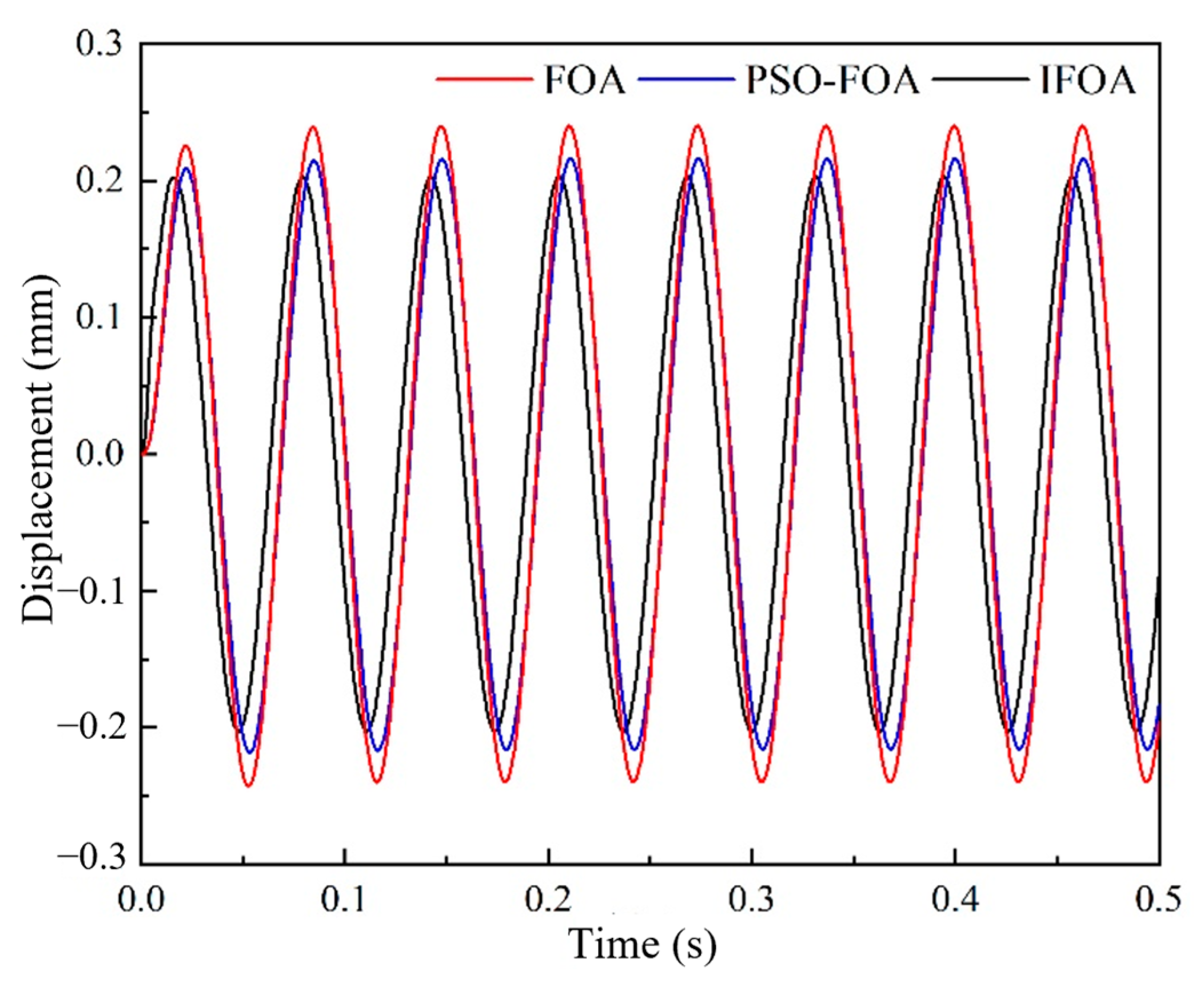
4.2. Simulation Analysis Based on PID Control
4.3. Establishment of the Test Platform for the Magnetorheological Suspension System
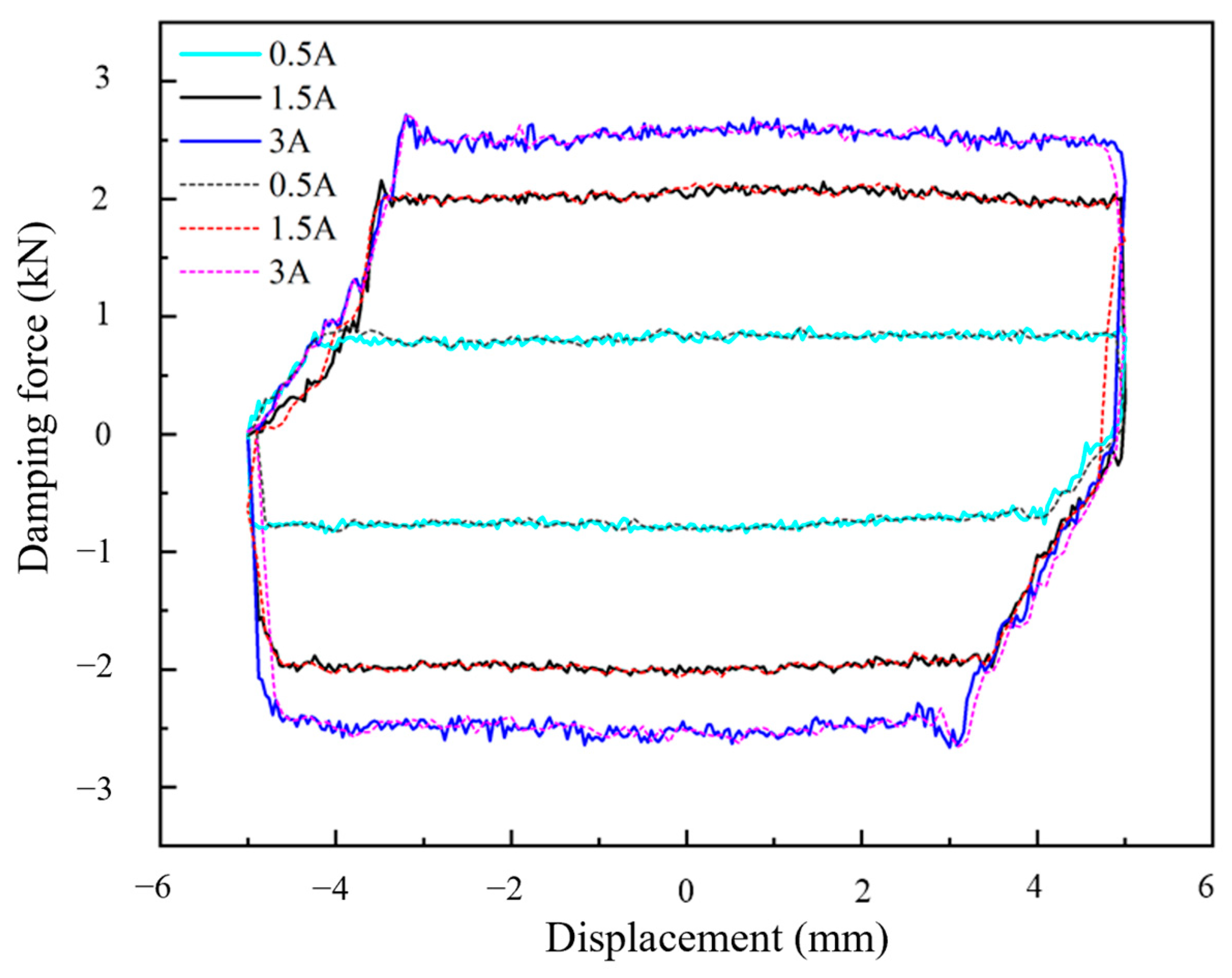
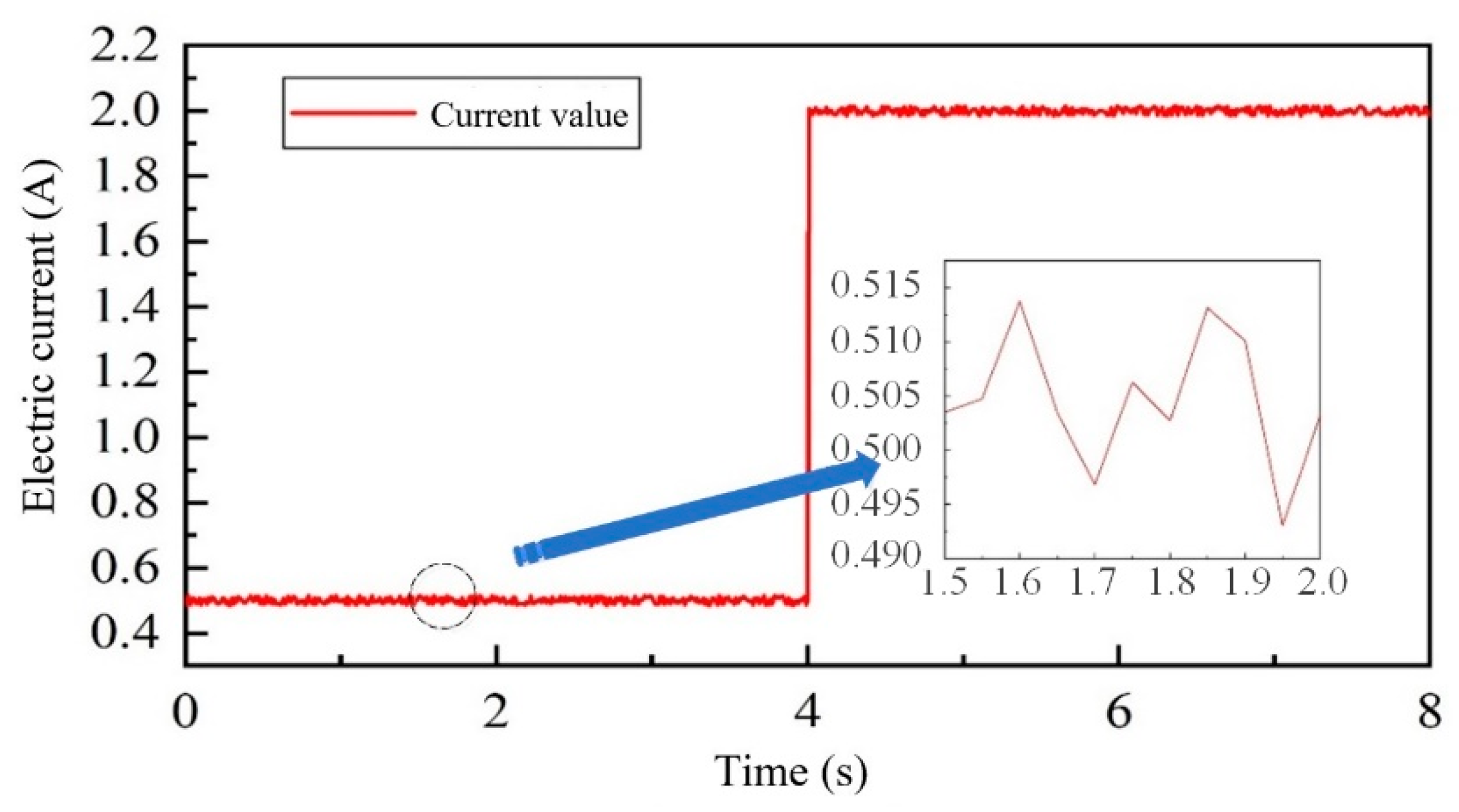
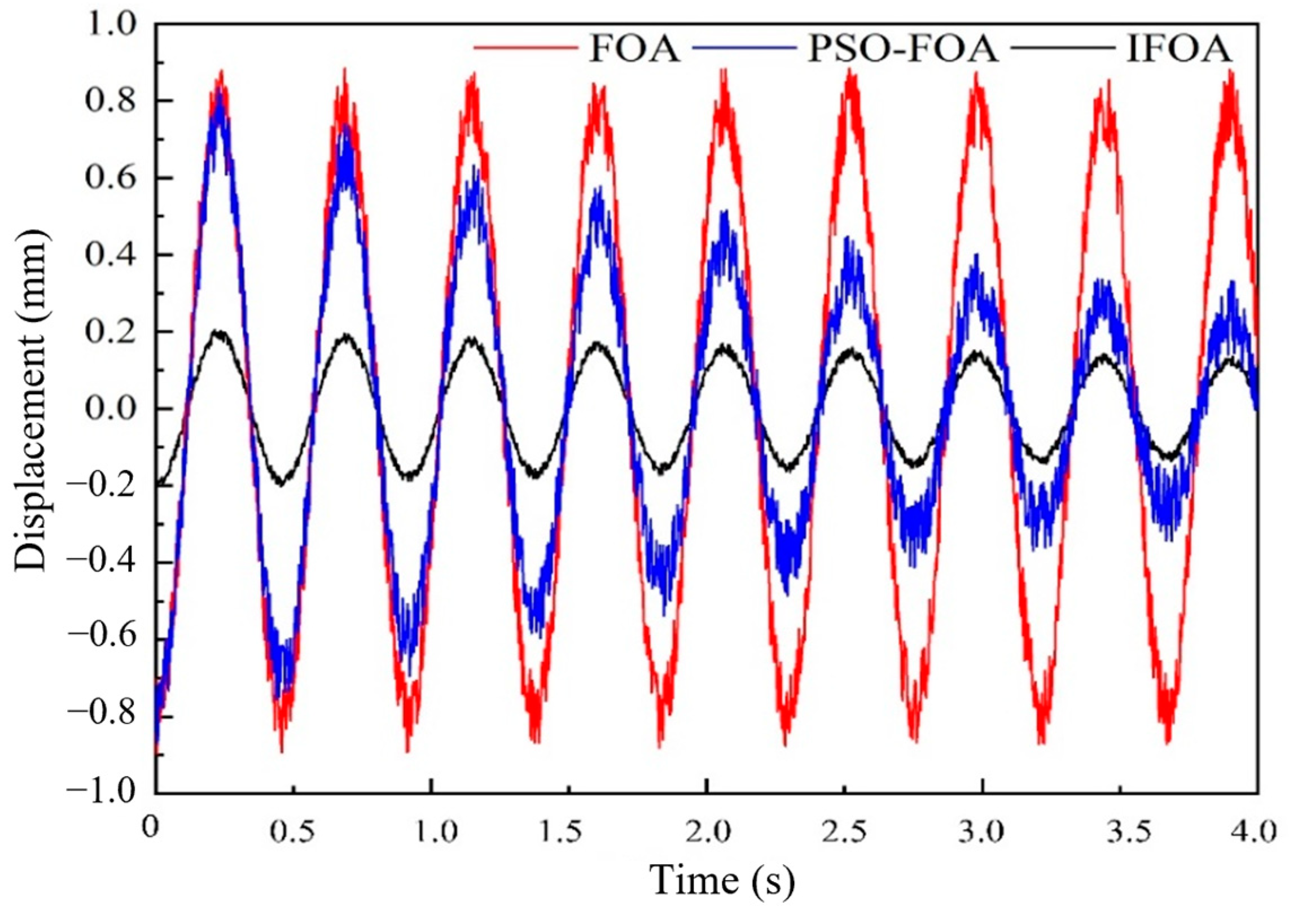
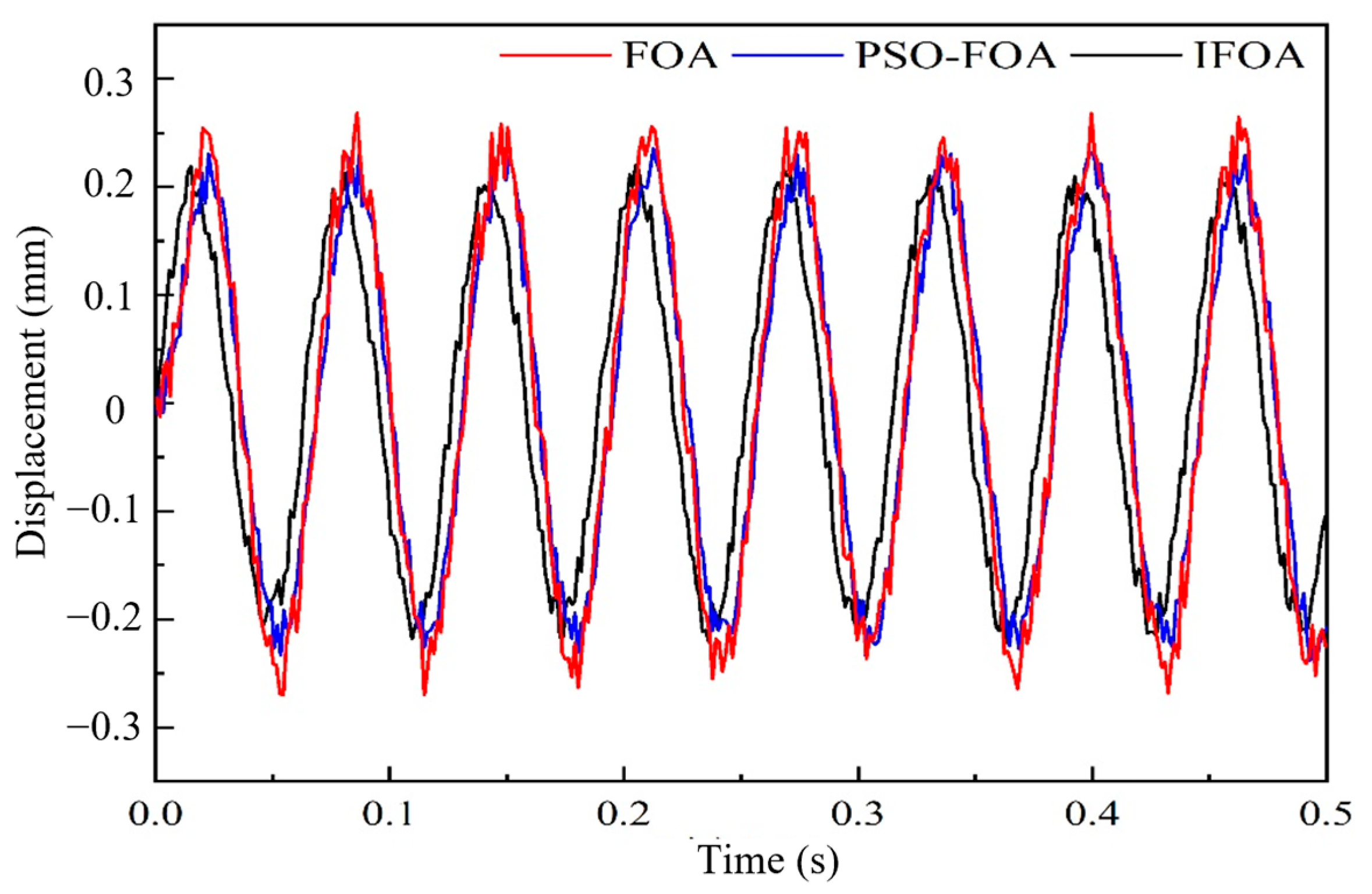
4.4. Experimental Study of Magnetorheological Suspension System
5. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rabinow, J. Magnetic Fluid Clutch. Trans. Am. Inst. Electr. Eng. 1948, 32, 54–60. [Google Scholar]
- Wang, D.M.; Hou, Y.F.; Tian, Z.Z. A novel high-torque magnetorheological brake with a water-cooling method for heat dissipation. Smart Mater. Struct. 2013, 22, 025019. [Google Scholar] [CrossRef]
- Song, X.M.; Wang, Y.Y. Speed Control of MRF Hydraulic Cylinder. J. Shenyang Univ. Nat. Sci. Ed. 2016, 28, 166–169. [Google Scholar]
- Foumani, M.S.; Khajepour, A.; Durali, M. Application of Shape Memory Alloys to a New Adaptive Hydraulic Mount. In Proceedings of the International Body Engineering Conference and Exhibition and Automotive and Transportation Technology Conference, Paris, France, 9–11 July 2002. [Google Scholar]
- Barber, D.E.; Carlson, J.D. Performance characteristics of prototype MR engine mounts containing LORD glycol MR fluids. J. Intell. Mater. Syst. Struct. 2010, 20, 012035. [Google Scholar] [CrossRef]
- Khameneifar, F.; Arzanpour, S.; Moallem, M. Piezo-actuated active decoupler hydraulic engine mount. In Proceedings of the ASME 2010 International Mechanical Engineering Congress and Exposition, New York, NY, USA, 15 June 2010; pp. 195–200. [Google Scholar]
- Mansour, H.; Arzanpour, S.; Golnaraghi, M.F.; Parameswaran, A.M. Semi-active engine mount design using auxiliary magneto-rheological fluid compliance chamber. Veh. Syst. Dyn. 2011, 49, 449–462. [Google Scholar] [CrossRef]
- Jones, R.P.; Cherry, A.S.; Farrall, S.D. Application of intelligent control in automotive vehicles. In Proceedings of the International Conference on Control, IET, Coventry, UK, 21–24 March 1994; Volume 1, pp. 159–164. [Google Scholar]
- Biglarbegian, M.; Melek, W.; Golnaraghi, F. A novel neuro-fuzzy controller to enhance the performance of vehicle semi-active suspension systems. Veh. Syst. Dyn. 2008, 46, 691–711. [Google Scholar] [CrossRef]
- Nguyen, T.; Elahinia, M.; Wang, S. Hydraulic hybrid vehicle vibration isolation control with magneto-rheological fluid mounts. Int. J. Veh. Des. 2013, 63, 199–222. [Google Scholar] [CrossRef]
- Kecik, K.; Mitura, A.; Sado, D.; Warminski, J. Magnetorheological damping and semi-active control of an autoparametric vibration absorber. Meccanica 2014, 49, 1887–1900. [Google Scholar] [CrossRef]
- Braz-César, M.; Barros, R. Optimization of a fuzzy logic controller for mr dampers using an adaptive neuro-fuzzy procedure. Int. J. Struct. Stab. Dyn. 2015, 17, 1740007. [Google Scholar] [CrossRef]
- Kim, H.S. Seismic response control of adjacent buildings coupled by semi-active shared TMD. Int. J. Steel Struct. 2016, 16, 647–656. [Google Scholar] [CrossRef]
- Ata, W.G.; Salem, A.M. Semi-active control of tracked vehicle suspension incorporating magnetorheological dampers. Veh. Syst. Dyn. 2017, 53, 626–647. [Google Scholar] [CrossRef]
- Bathaei, A.; Zahrai, S.M.; Ramezani, M. Semi-active seismic control of an 11-DOF building model with TMD plus MR damper using type-1 and-2 fuzzy algorithms. J. Vib. Control 2018, 24, 2938–2953. [Google Scholar] [CrossRef]
- Oh, J.S.; Choi, S.B. Ride quality control of a full vehicle suspension system featuring magnetorheological dampers with multiple orifice holes. Front. Mater. 2019, 28, 8. [Google Scholar] [CrossRef]
- Koç, M.A. A new expert system for active vibration control (AVC) for high-speed train moving on a flexible structure and PID optimization using MOGA and NSGA-II algorithms. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 151. [Google Scholar] [CrossRef]
- Kayabekir, A.E.; Nigdeli, S.M.; Bekdaş, G. A hybrid metaheuristic method for optimization of active tuned mass dampers. Comput. Aided Civ. Infrastruct. Eng. 2022, 37, 1027–1043. [Google Scholar] [CrossRef]
- Ulusoy, S.; Bekdaş, G.; Nigdeli, S.; Kim, S.; Geem, Z. Performance of Optimum Tuned PID Controller with Different Feedback Strategies on Active-Controlled Structures. Appl. Sci. 2021, 11, 1682. [Google Scholar] [CrossRef]
- Ulusoy, S.; Nigdeli, S.M.; Bekdaş, G. Novel metaheuristic-based tuning of PID controllers for seismic structures and verification of robustness. J. Build. Eng. 2021, 33, 101647. [Google Scholar] [CrossRef]
- Aliramezani, M.; Koch, C.R.; Shahbakhti, M. Modeling, diagnostics, optimization, and control of internal combustion engines via modern machine learning techniques: A review and future directions. Prog. Energy Combust. Sci. 2022, 88, 100967. [Google Scholar] [CrossRef]
- Yang, G.; Spencer, B.F.; Jung, H.; Carlson, J.D. Dynamic modeling of large-scale magnetorheological damper systems for civil engineering applications. J. Eng. Mech. ASCE 2004, 130, 1107–1114. [Google Scholar] [CrossRef]
- Stanway, R.; Sproston, J.L.; Stevens, N.G. Non-linear modelling of an electro-rheological vibration damper. J. Electrost. 1987, 20, 167–184. [Google Scholar] [CrossRef]
- Wang, D.H.; Liao, W.H. Neural network modeling and controllers for magnetorheological fluid dampers. In Proceedings of the IEEE International Conference on Fuzzy Systems, Melbourne, VIC, Australia, 2–5 December 2001; IEEE: New York, NY, USA, 2001; pp. 1323–1326. [Google Scholar]
- Wang, D.H.; Liao, W.H. Modeling and control of magnetorheological fluid dampers using neural networks. Smart Mater. Struct. 2005, 14, 111–126. [Google Scholar] [CrossRef]
- Wu, J.; Liu, Z. Study on control strategy of magneto rheological semi-active suspension with neural network inverse model. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; IEEE: New York, NY, USA, 2014; pp. 257–262. [Google Scholar]
- Kong, X.; Li, B.; Quan, L.; Yi, B.; Zhang, Y. Study on dynamic Bingham-polynomial model of an MRF damper. J. Mech. Eng. 2017, 53, 179–186. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Dyke, S.J.; Sain, M.K.; Carlson, J.D. Phenomenological model of a magnetorheological damper. J. Eng. Mech. 1997, 123, 230–238. [Google Scholar] [CrossRef]
- Raizada, A.; Singru, P.; Krishnakumar, V.; Raj, V. Development of an experimental model for a magnetorheological damper using artificial neural networks (Levenberg-Marquardt Algorithm). Adv. Acoust. Vib. 2016, 2016, 7027259. [Google Scholar] [CrossRef]
- Hu, L.Y.; Chen, A.L. Research on fuzzy-PID control for a tension system of rotary magnetorheological damper. Appl. Mech. Mater. 2009, 16, 93–99. [Google Scholar] [CrossRef]
- Xing, B.; Gao, W.-J. Fruit Fly Optimization Algorithm. In Innovative Computational Intelligence: A Rough Guide to 134 Clever Algorithms; Springer: Cham, Switzerland, 2013; Volume 62, pp. 167–170. [Google Scholar]
- Deyi, L.; Shi, X.M.; Gupta, M.M. Soft interface mechanism based on cloud models. In Proceedings of the 1st International Workshop on Logic Programming and Soft Computing: Theory and Applications, Bonn, Germany, 2–6 September 1996. [Google Scholar]
- Li, D.; Han, J.; Shi, X.; Chan, M.C. Knowledge representation and discovery based on linguistic atoms. Knowl. Based Syst. 1998, 10, 431–440. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Incentive Conditions | 0.5 A | 1.5 A | 3 A |
|---|---|---|---|
| Prediction accuracy | 94.98% | 98.26% | 99.93% |
| Excitation Condition | 0 A | 0.5 A | 1 A | 1.5 A | 2 A | 2.5 A | 3 A |
|---|---|---|---|---|---|---|---|
| Prediction accuracy | 97.18% | 97.85% | 99.43% | 99.46% | 99.75% | 99.83% | 99.76% |
| Control Algorithm | Idle Speed | High Speed | ||
|---|---|---|---|---|
| Displacement/mm | Displacement/mm | |||
| FOA | 0.36271 | 0.565814 | 1.30892 | 0.173795 |
| PSO-FOA | 0.210963 | 0.34847 | 0.788329 | 0.155848 |
| IFOA | 0.145829 | 0.112976 | 0.617804 | 0.148038 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, L.; Fang, C.; Lu, H.; Liu, X.; Hua, D.; Yang, Y. Research on Structure Design and Control Method of Magnetorheological Suspension Based on Improved Fruit Fly Optimization Algorithm. Machines 2023, 11, 273. https://doi.org/10.3390/machines11020273
Dai L, Fang C, Lu H, Liu X, Hua D, Yang Y. Research on Structure Design and Control Method of Magnetorheological Suspension Based on Improved Fruit Fly Optimization Algorithm. Machines. 2023; 11(2):273. https://doi.org/10.3390/machines11020273
Chicago/Turabian StyleDai, Lili, Congmin Fang, He Lu, Xinhua Liu, Dezheng Hua, and Yuping Yang. 2023. "Research on Structure Design and Control Method of Magnetorheological Suspension Based on Improved Fruit Fly Optimization Algorithm" Machines 11, no. 2: 273. https://doi.org/10.3390/machines11020273
APA StyleDai, L., Fang, C., Lu, H., Liu, X., Hua, D., & Yang, Y. (2023). Research on Structure Design and Control Method of Magnetorheological Suspension Based on Improved Fruit Fly Optimization Algorithm. Machines, 11(2), 273. https://doi.org/10.3390/machines11020273