
Singularity Analysis and Geometric Optimization of a 6-DOF Parallel Robot for SILS

 ,
,  , , and
, , and 
Abstract
:1. Introduction
2. An Innovative Parallel Robotic System for SILS
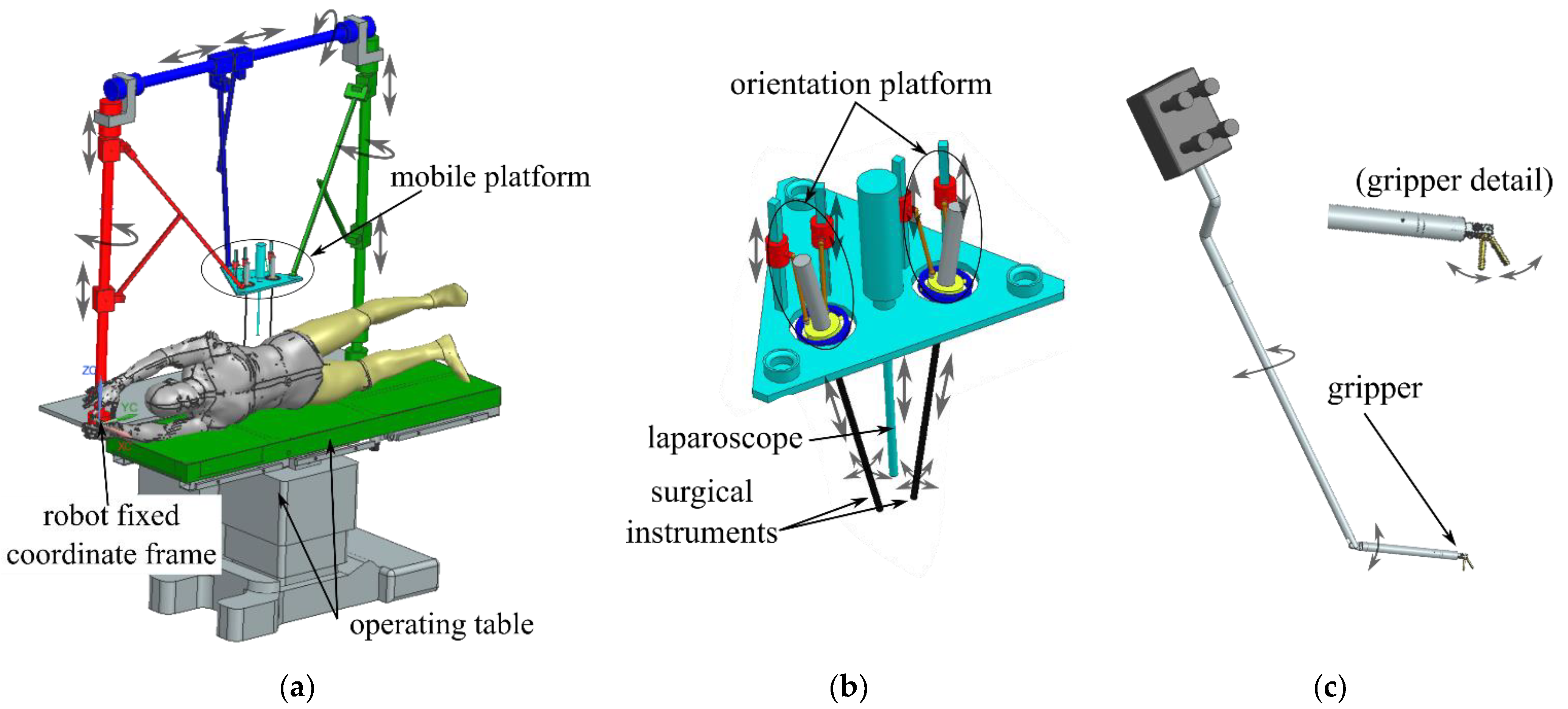
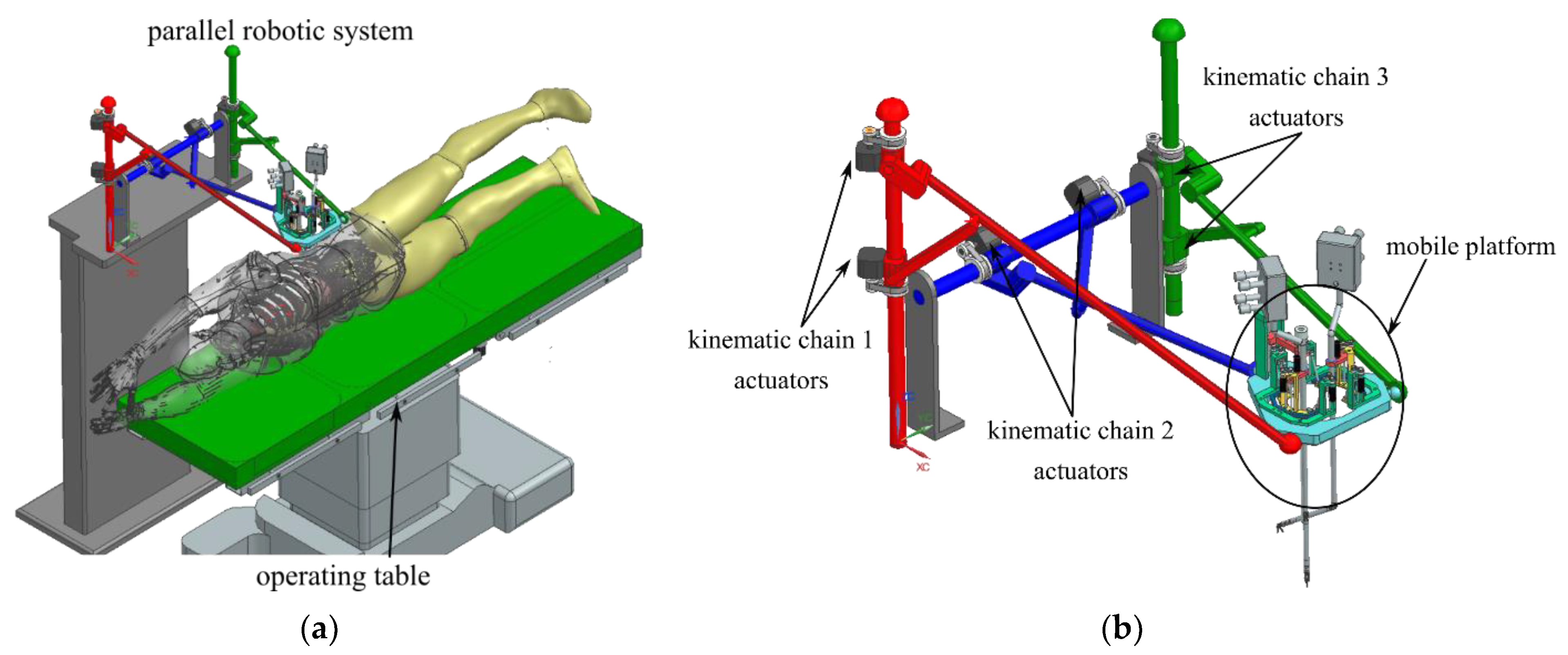
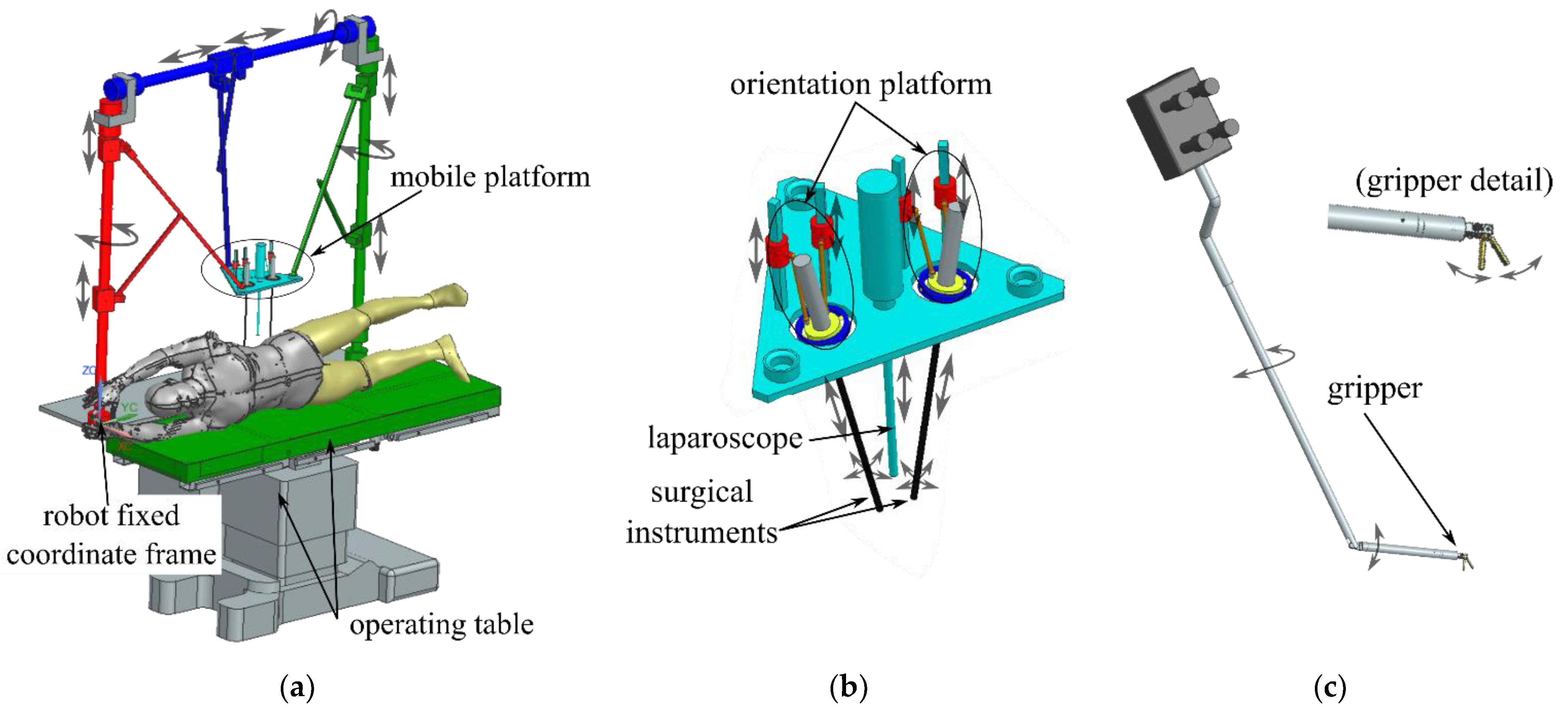
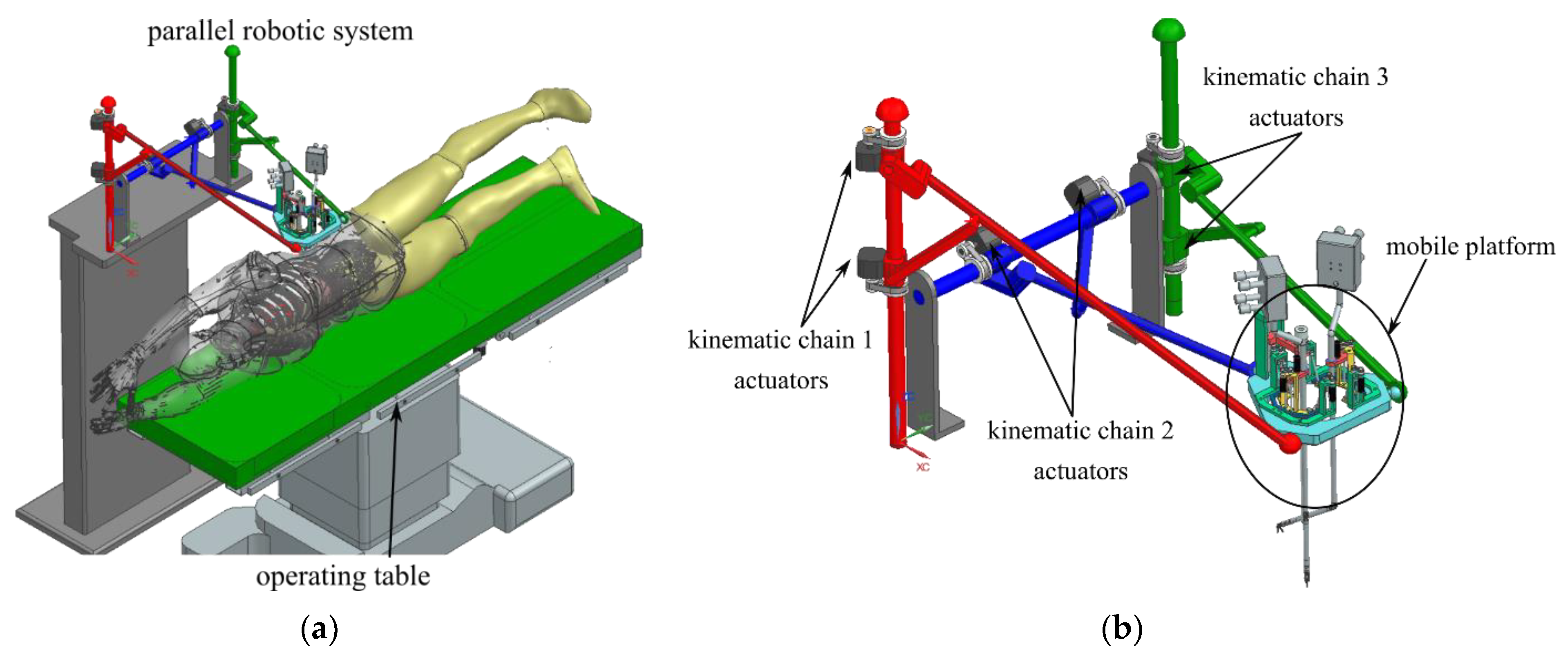
- Two 3-DOF orientation platforms (described in [29])—both mounted on the mobile platform (Figure 1b) on the sides of the laparoscopic camera insertion mechanism. The orientation platform can orient the surgical instruments using RCM with 2-DOF. The third DOF is for the linear insertion/retraction of the surgical instrument;
- Two surgical instruments (described in [28])—each mounted in one orientation platform. Each surgical instrument has a serial architecture with 4-DOF: 1-DOF for the rotation about its longitudinal axis (the third rotation for the surgical instrument), 1-DOF for the (articulated) bending, and 2-DOF for the gripper (each jaw of the gripper is actuated separately enabling grabbing and gripper turning) (Figure 1c).
- A preplanning procedure is performed to establish the adequate therapeutic conduit, also with respect to the robotic-assisted medical task. Among other medical parameters (patient history, etc.), the patient position is established, insertion points for the instruments are defined, and the relative position of the robot with respect to the insertion points is defined to ensure the required ranges of motions for the surgical instruments;
- The 6-DOF parallel robot positions the mobile platform at the trocar (insertion points) and inserts the laparoscope and the surgical instruments on a linear trajectory. Due to the mechanically constrained RCM position (near the mobile platform), the 6-DOF parallel robot guides the mobile platform in close proximity to the patient;
- The combined motion of the 3-DOF orientation platforms and the 4-DOF surgical instruments allows the surgeon to perform the task from the control console;
- The laparoscope position can be adjusted by reorienting the mobile platform. Consequently, the laparoscope RCM must be maintained through the robot control, and simultaneously, the instrument position must be corrected by the 3-DOF orientation platforms (e.g., to maintain the instrument gripper-tissue relative position while changing the laparoscope position).
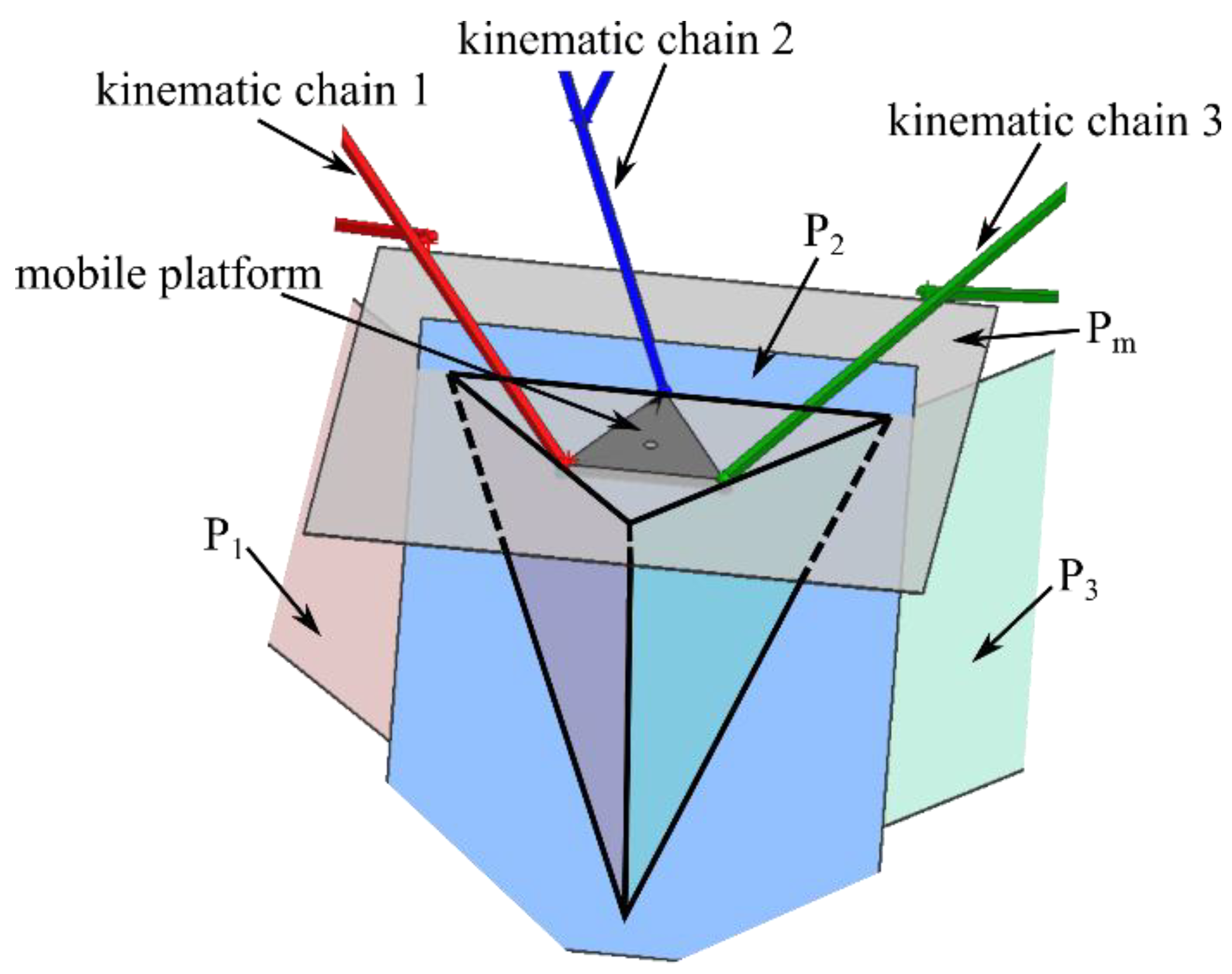
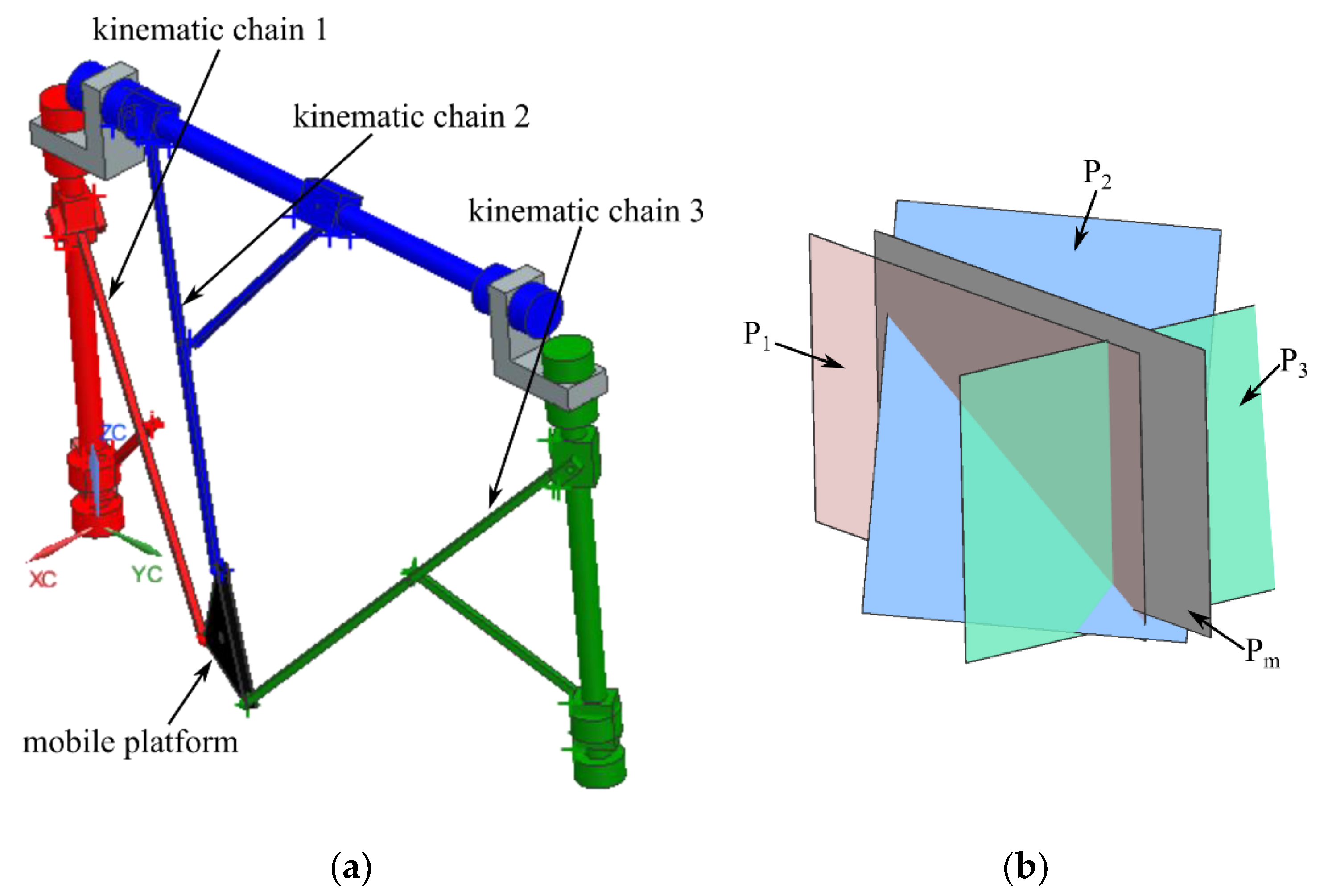
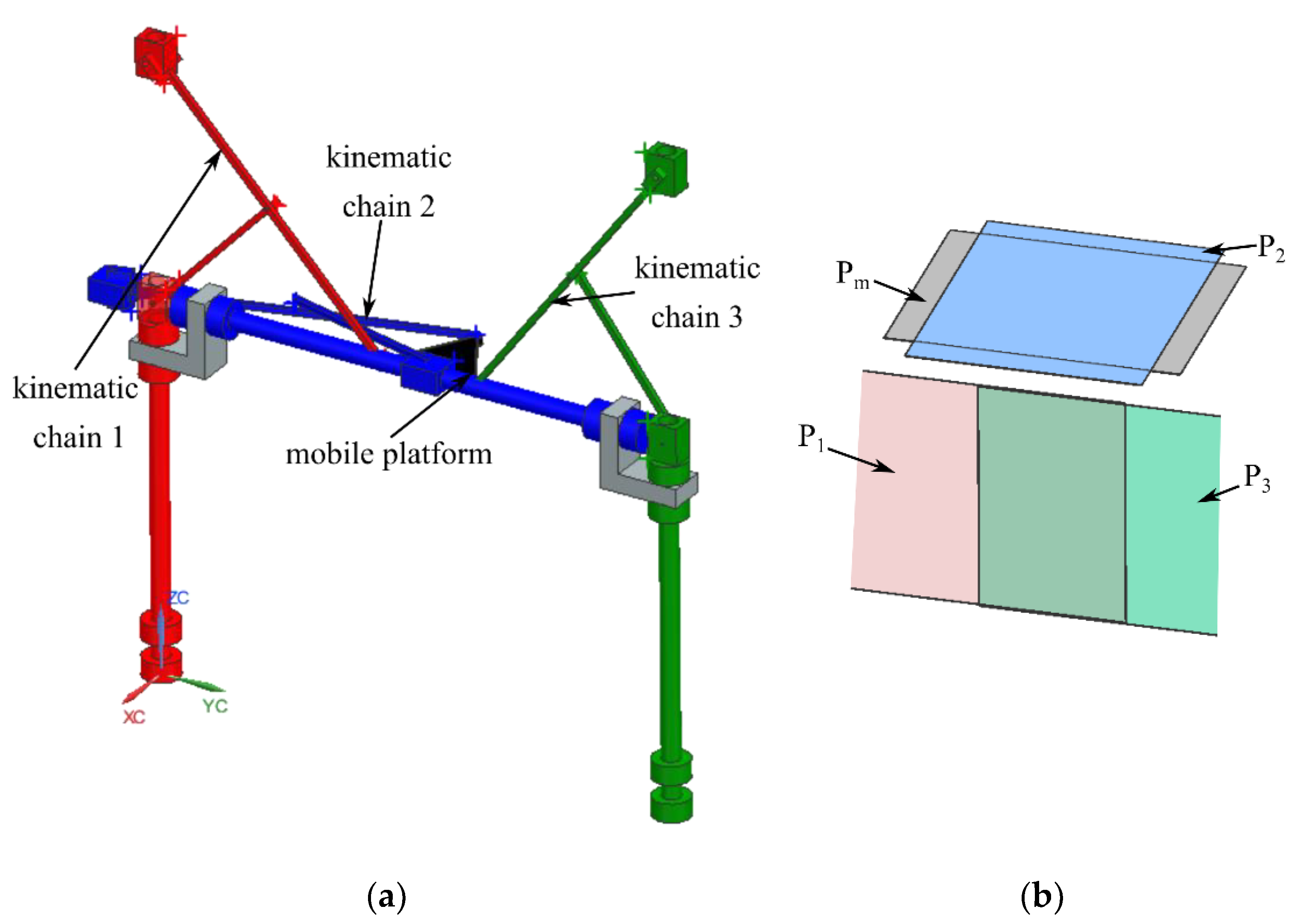
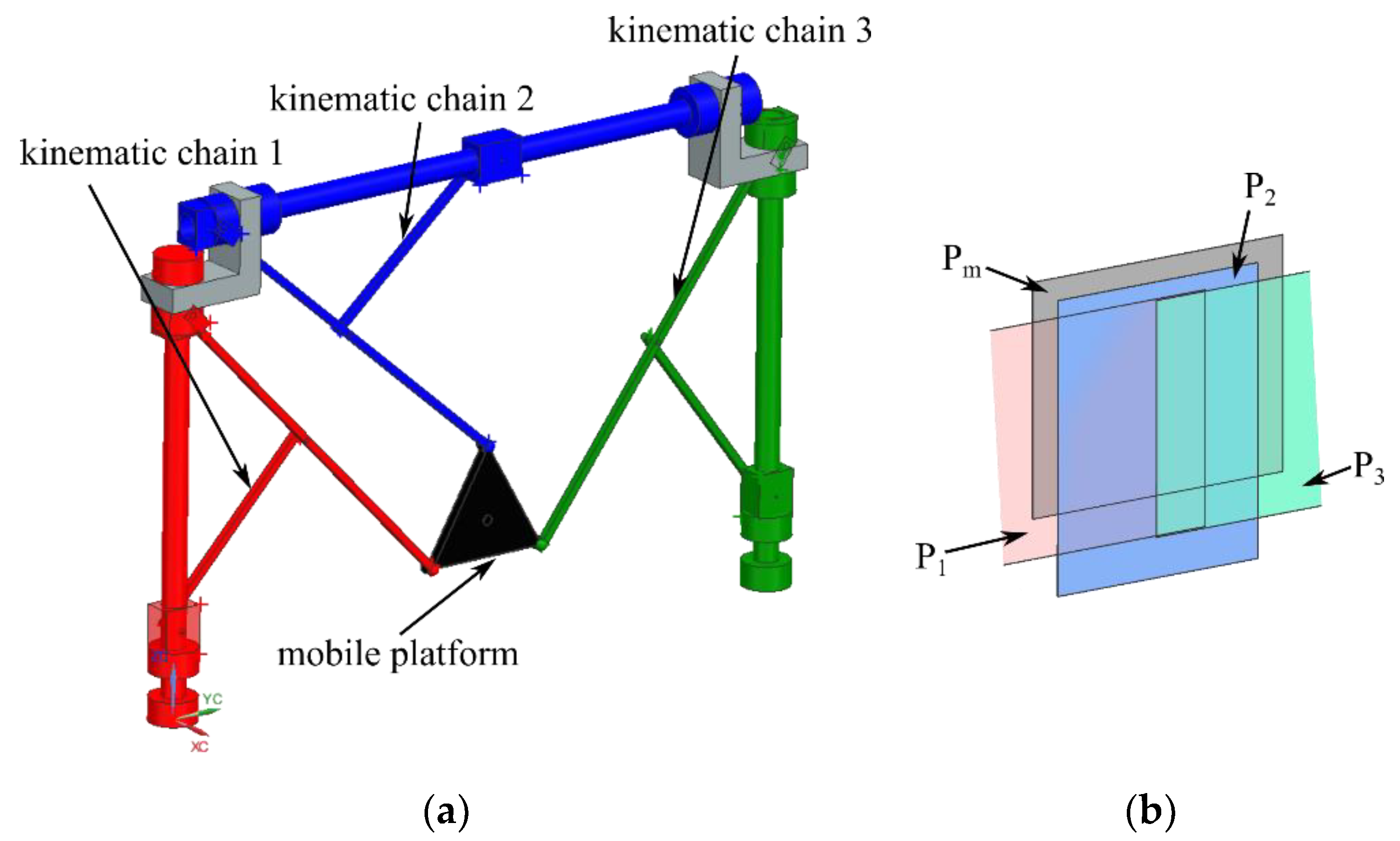
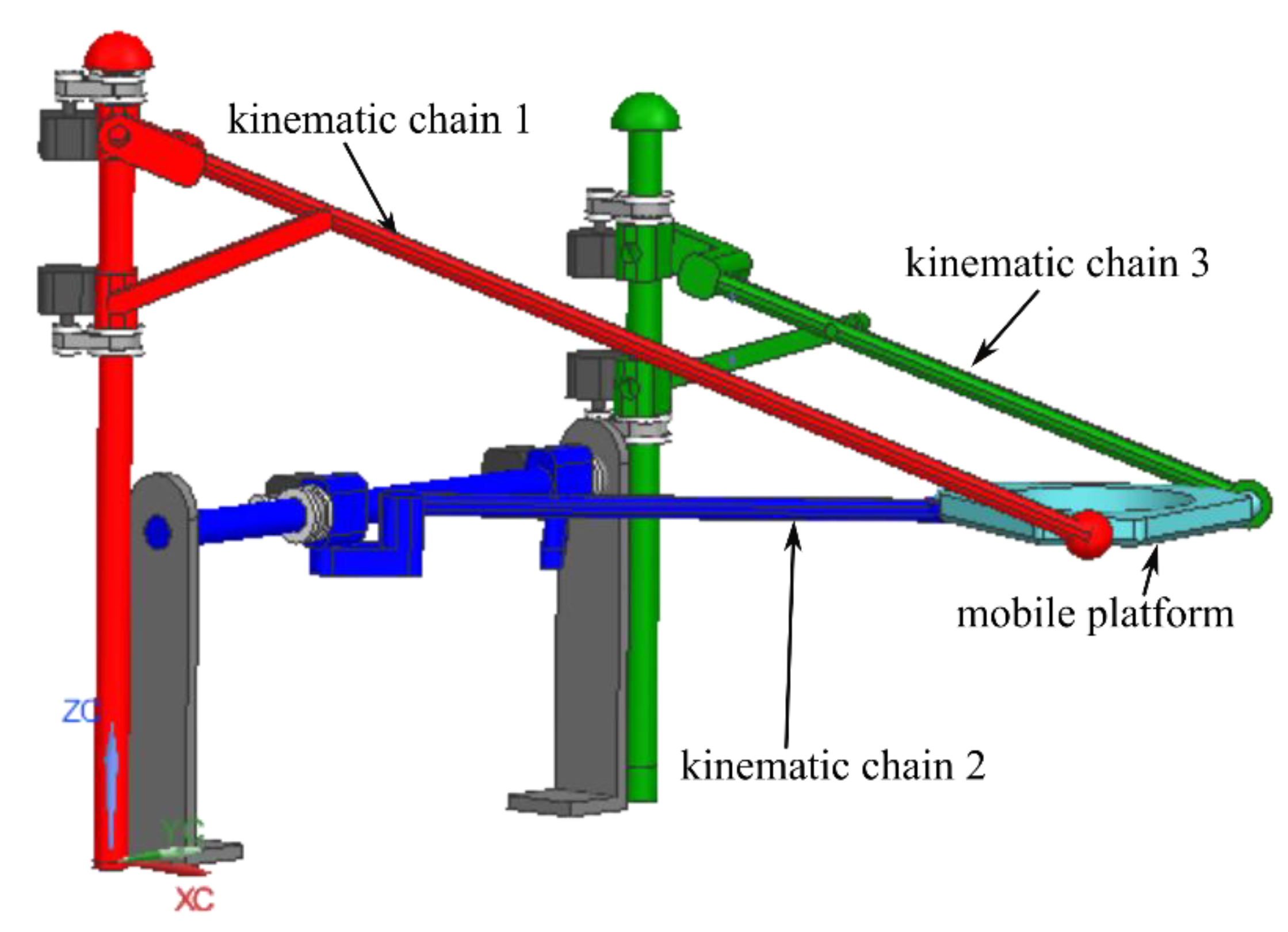
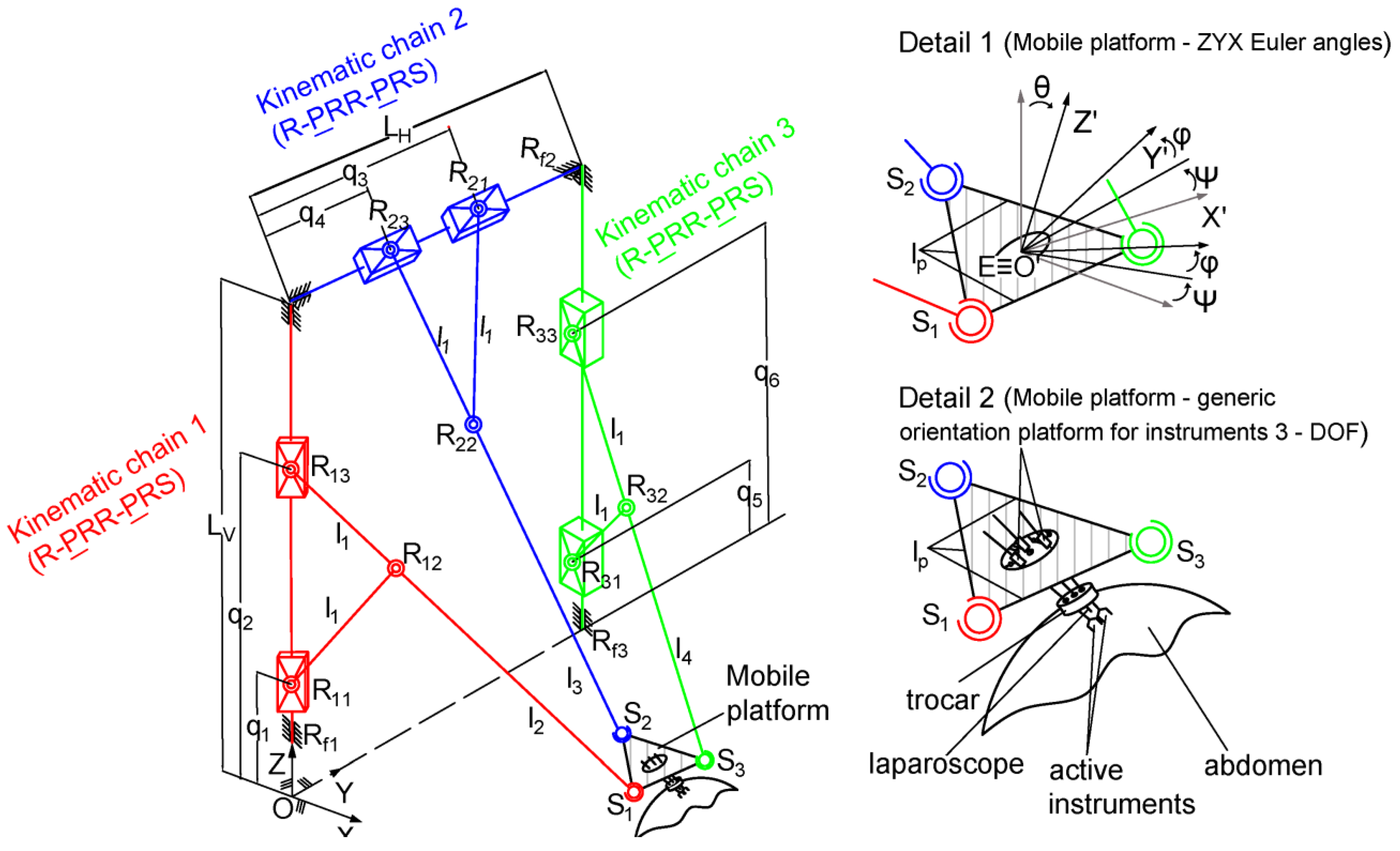
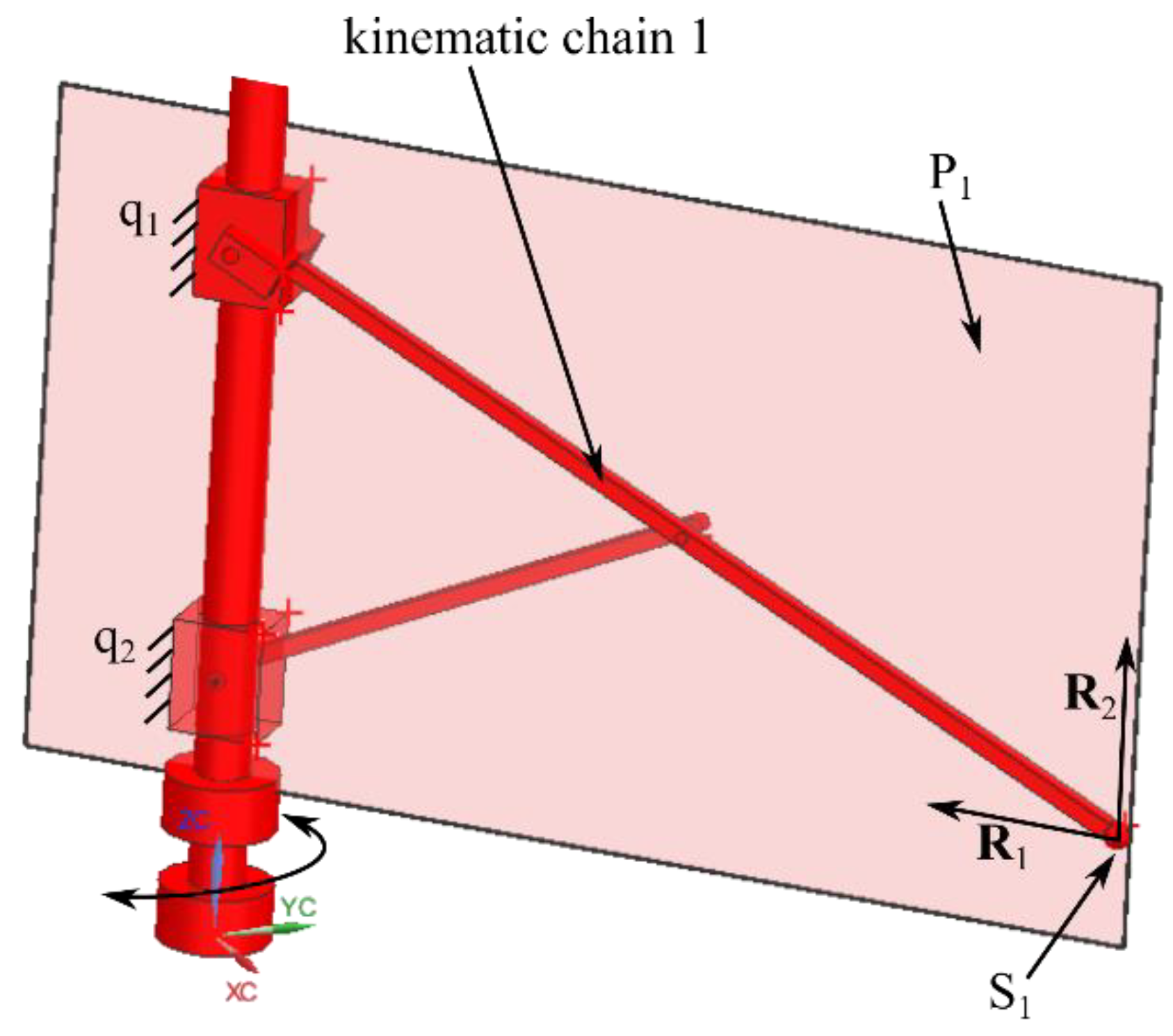
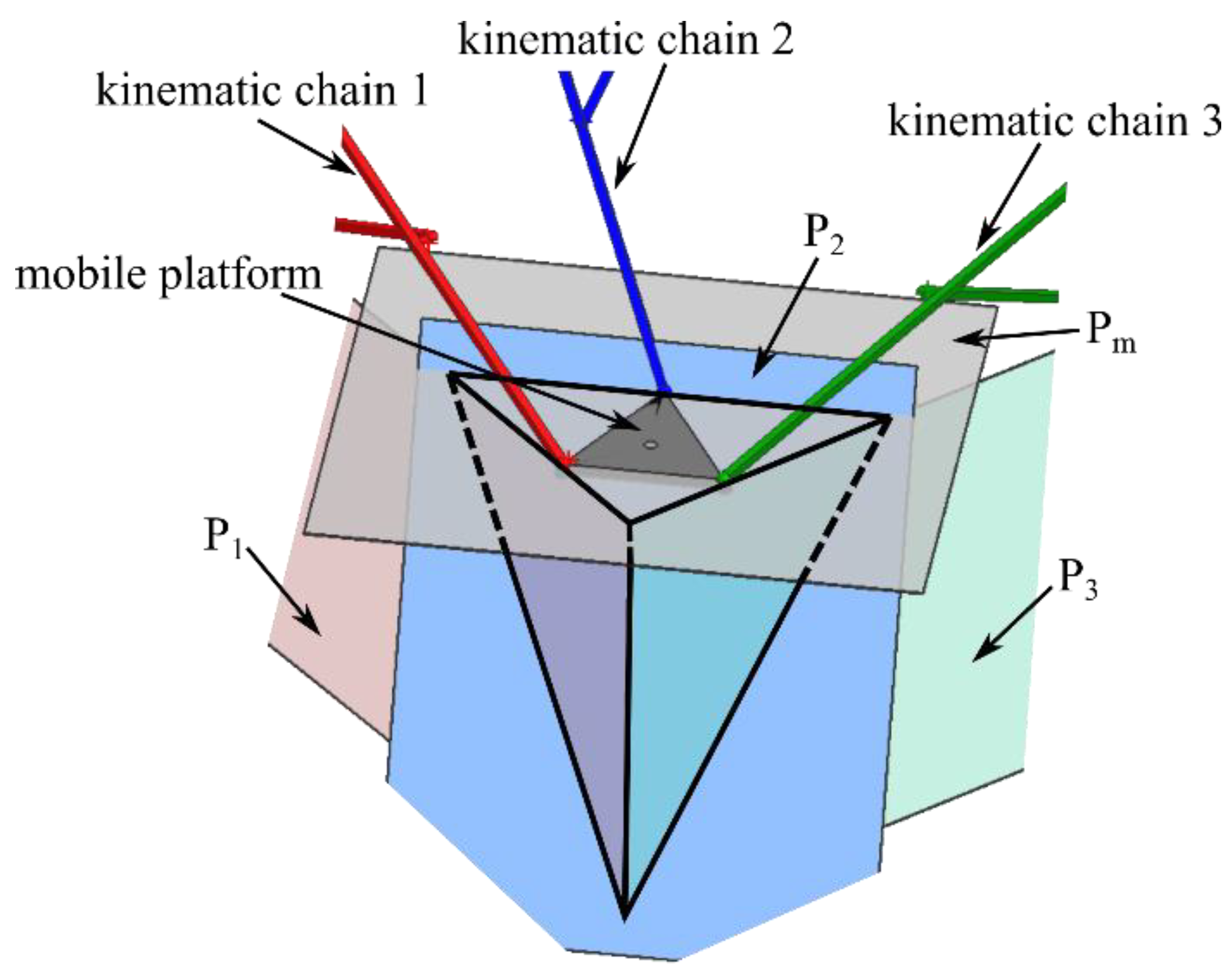
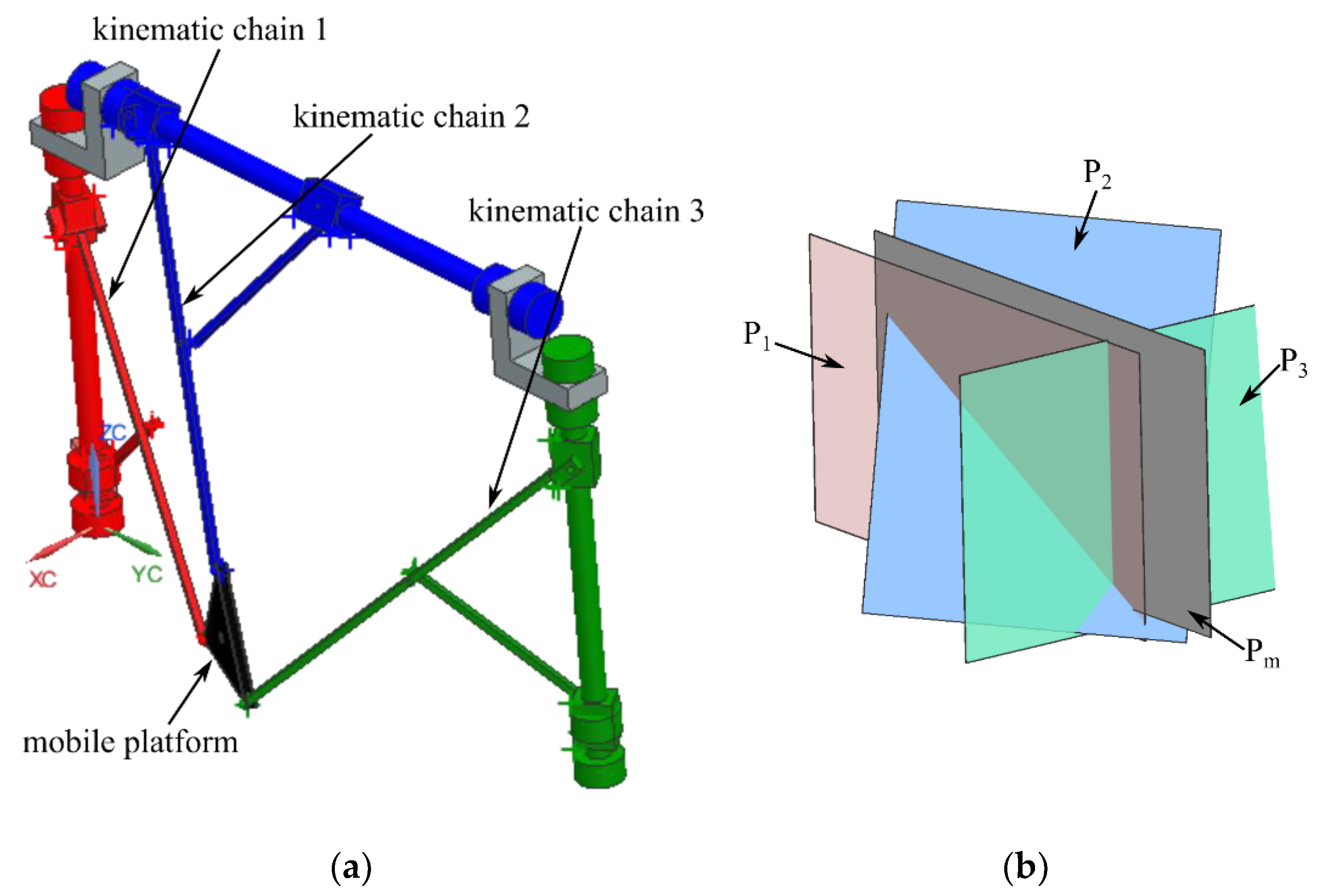
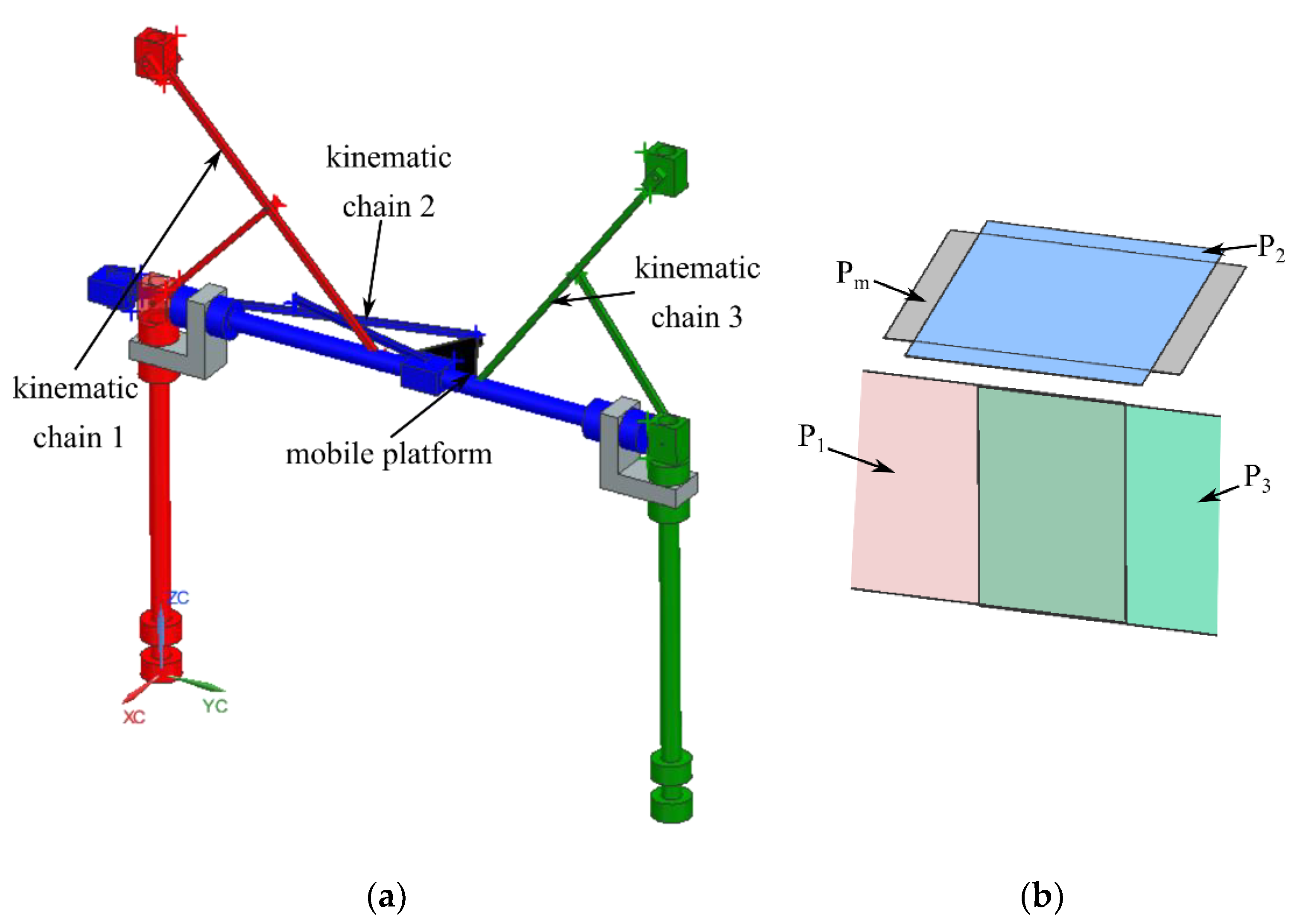
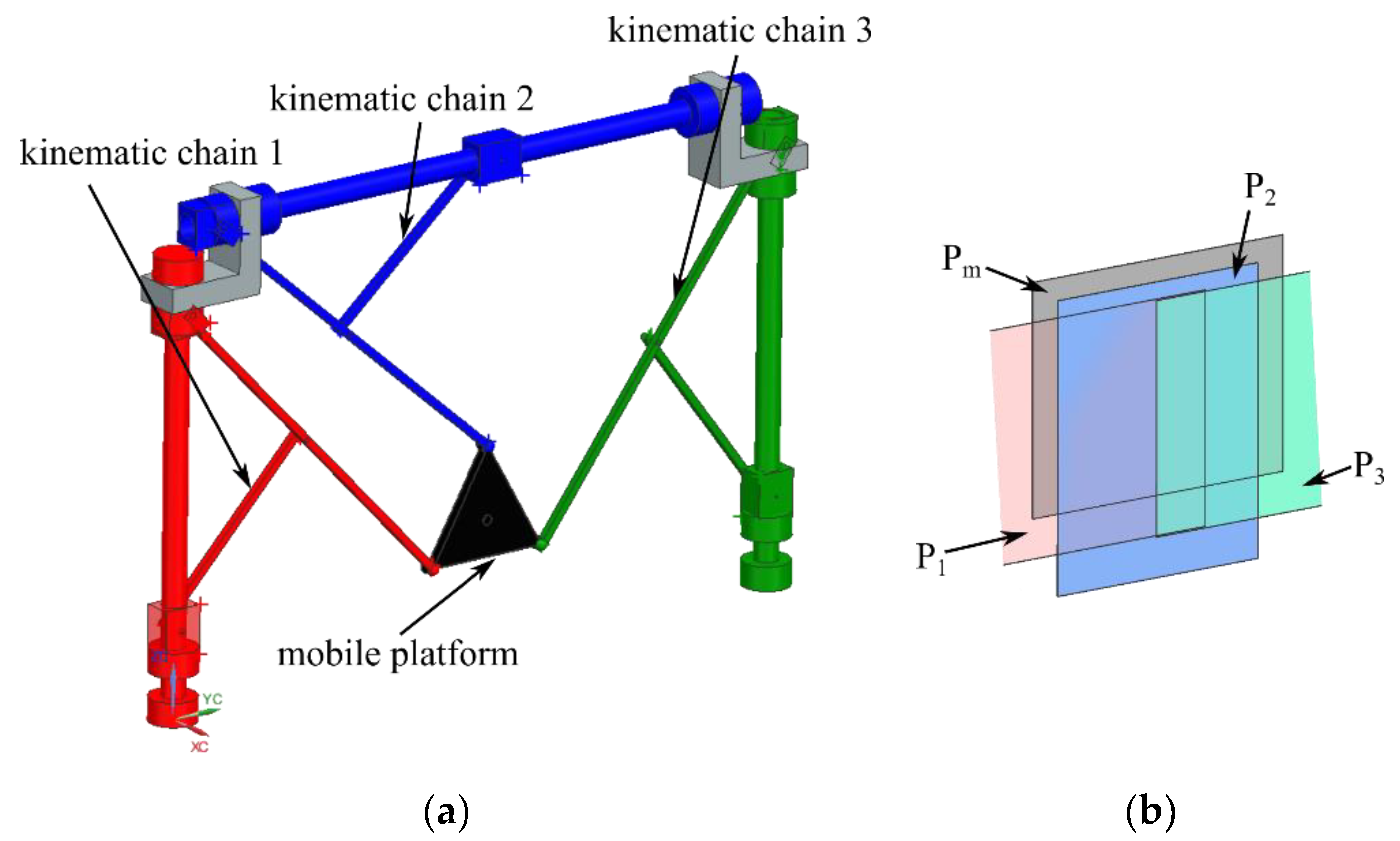
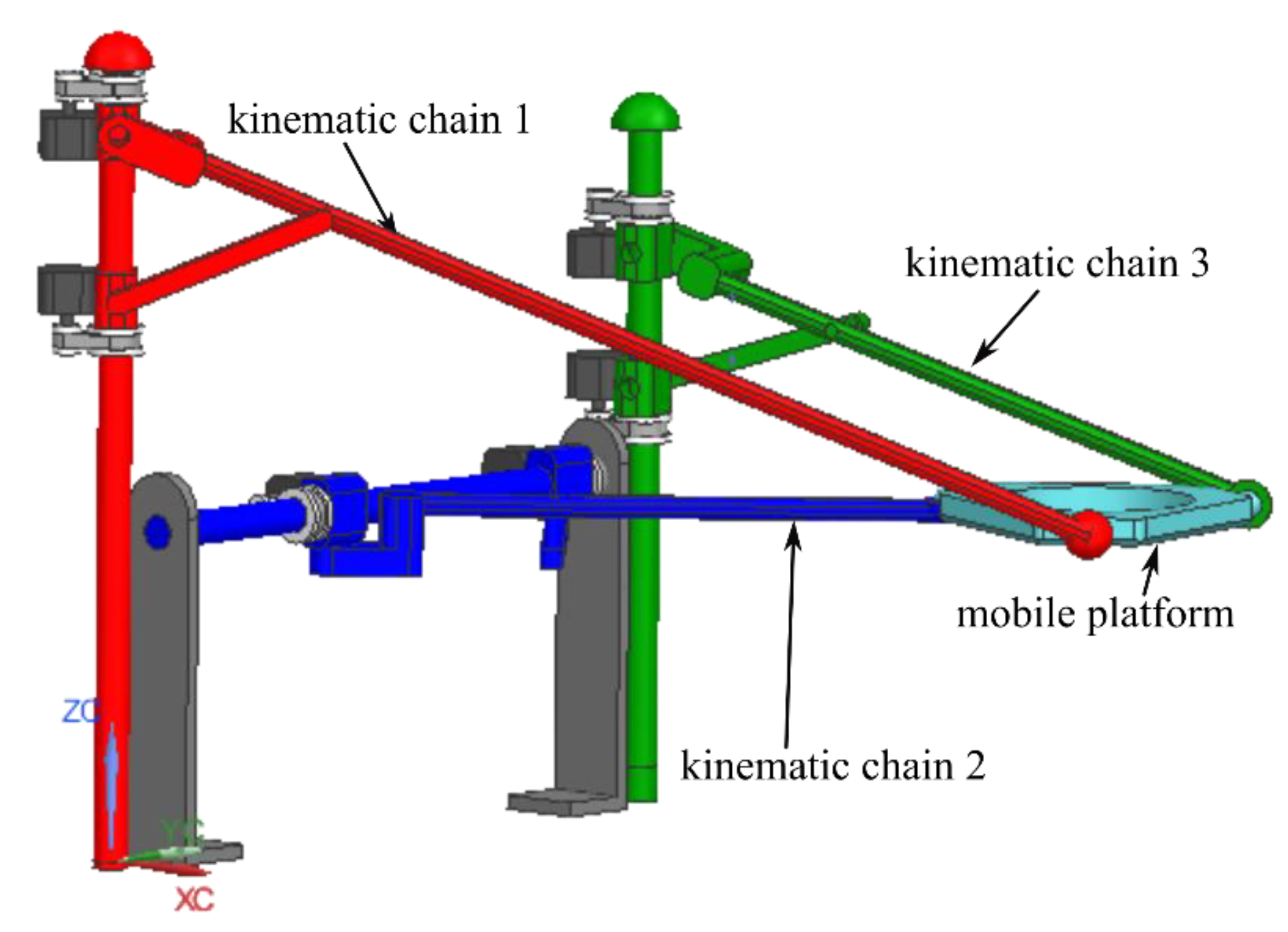
- The parallel robot consists of three (R-PRR-PRS) kinematic chains actuated by the prismatic joints pairs q1 and q2 for the first kinematic chain, q3 and q4 for the second kinematic chain, and q5 and q6 for the third kinematic chain. Furthermore, each kinematic chain has a free rotation motion around the actuation axis of the prismatic joints (Rf1, Rf2, and Rf3, respectively), and three passive revolute joints (R11, R12, and R13 for the first kinematic chain, R21, R22, and R23 for the second kinematic chain, R31, R32, and R33 for the third kinematic chain);
- The three kinematic chains guide the mobile platform via three passive spherical joints, S1, S2, and S3, respectively. The mobile platform contains two orientation platforms which are illustrated in Figure 2 (Detail 2) as generic mechanisms (to point out the functionality). The kinematic scheme of these orientation platforms is presented in [29];
- The fixed coordinate frame OXYZ is attached to the robot base, and the mobile coordinate frame O’X’Y’Z’ is attached to the mobile platform with its origin at the geometric center of the equilateral triangle formed by the centers of the three passive spherical joints (S1, S2, S3). Furthermore, point E [XE, YE, ZE] is defined as the origin of the mobile coordinate frame O’X’Y’Z’.
Inverse Geometric Modelling for the 6-DOF Parallel Robot
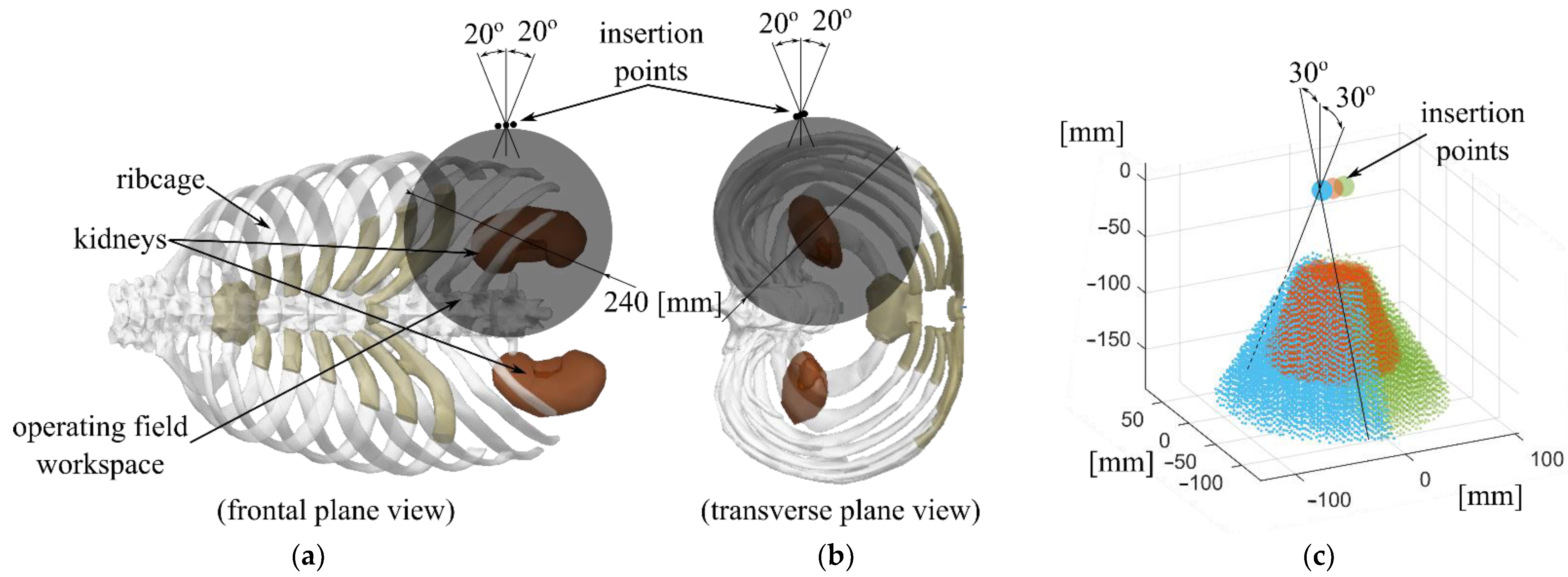
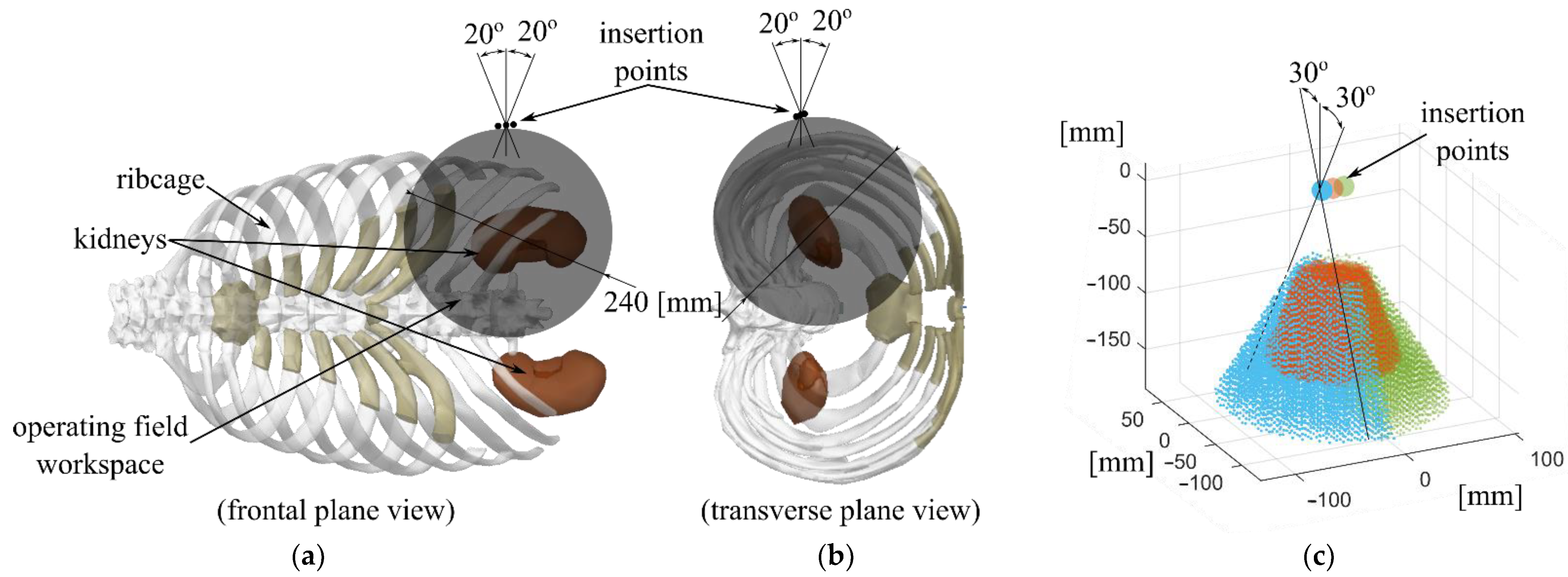
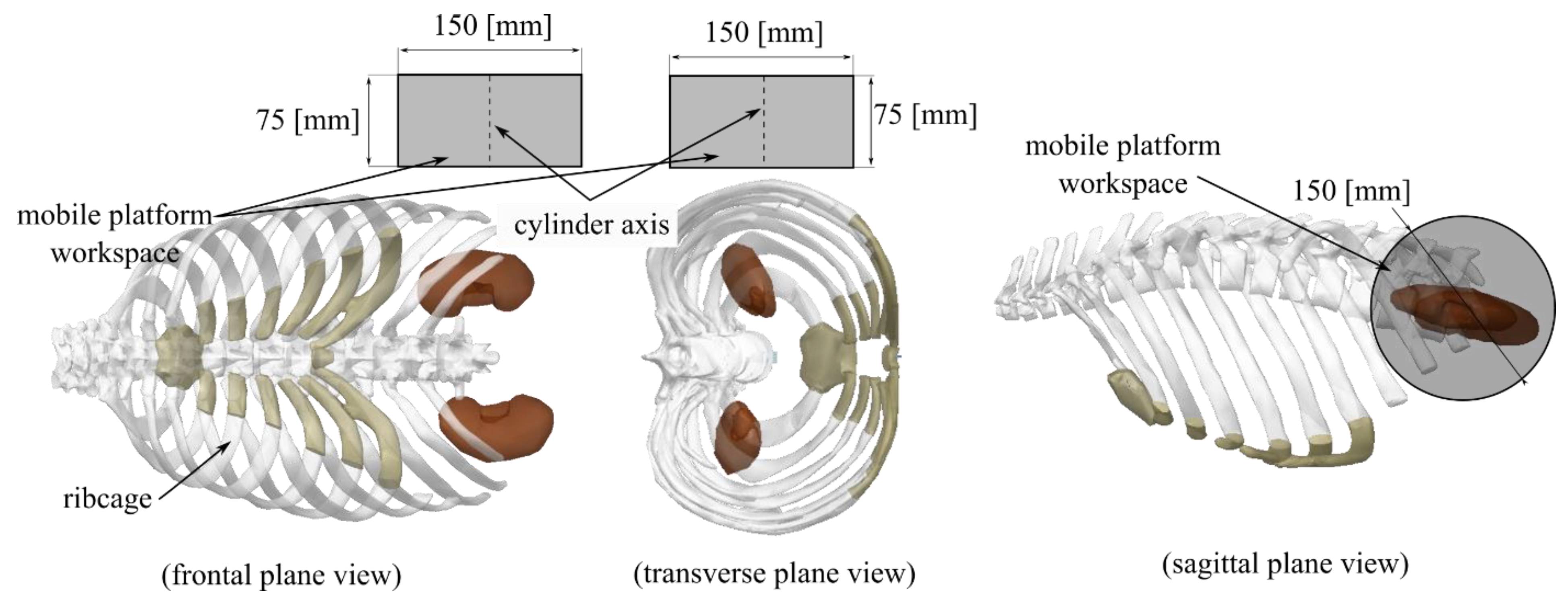
3. The Proposed Operational Workspace for the Parallel Robotic System for SILS
- The maximum laparoscope angles in all directions with respect to a vertical axis passing through the insertion point to be 20 [°], achieved with the 6-DOF parallel robot;
- The maximum angle for the active instruments in all directions with respect to an axis orthogonal to the mobile platform (of the 6-DOF parallel robot) passing through the insertion point to be 30 [°], achieved with the orientation platforms described in [29].
4. Singularities of the 3-R-PRR-PRS Parallel Robot
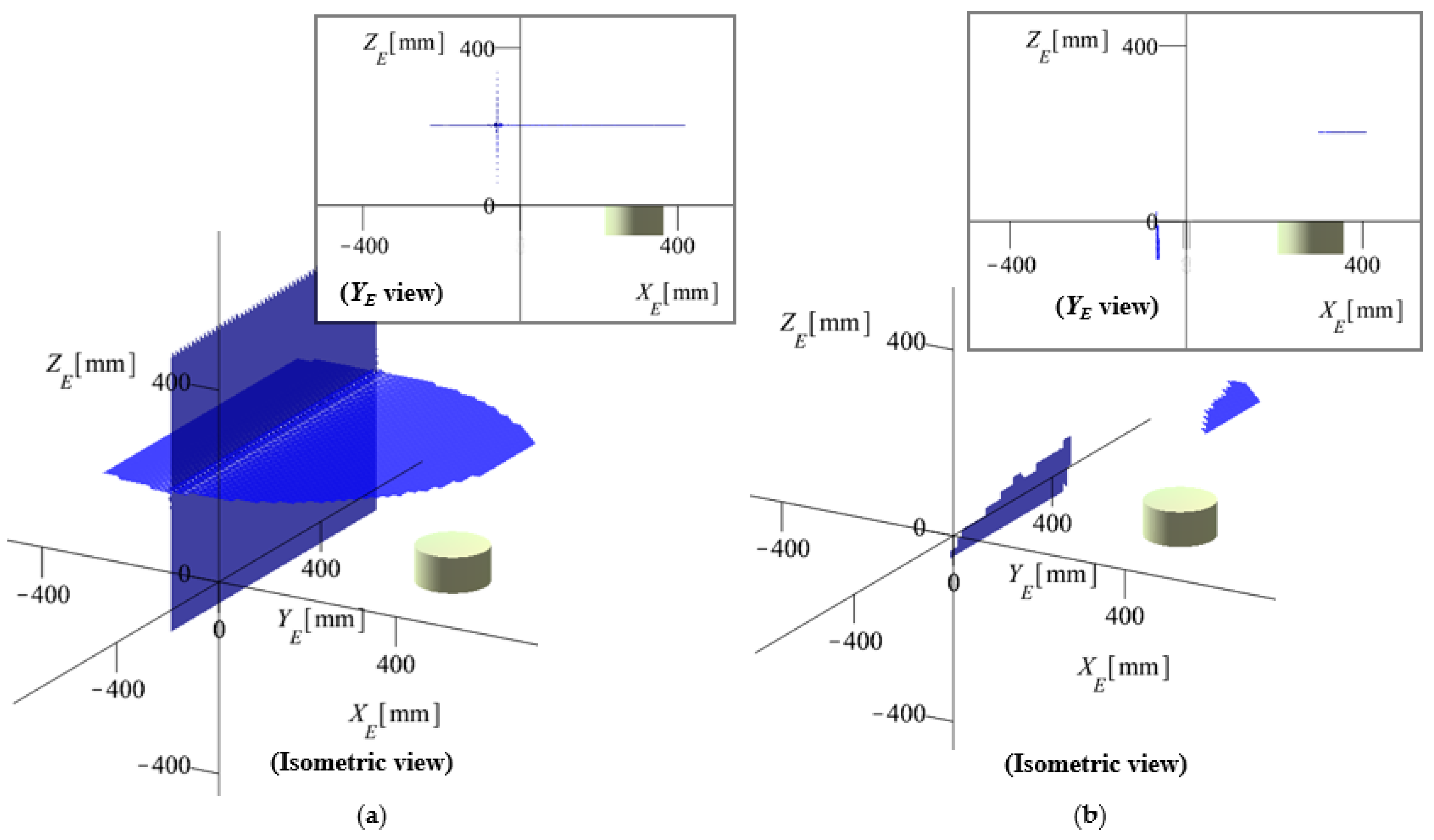
4.1. Type I Singularities
- ; this condition causes det(B) to be undefined; however, this condition is disregarded since it will be avoided in the mechanism design (link lengths cannot be 0);
- or or ; these conditions imply negative values for the link lengths, and are not regarded as possible singularities due to the mechanism design;
- or or ; these conditions require that the active joints of a kinematic chain are equal, meaning the active joints are overlapping. This condition is avoidable in the robot design or in the robot control.
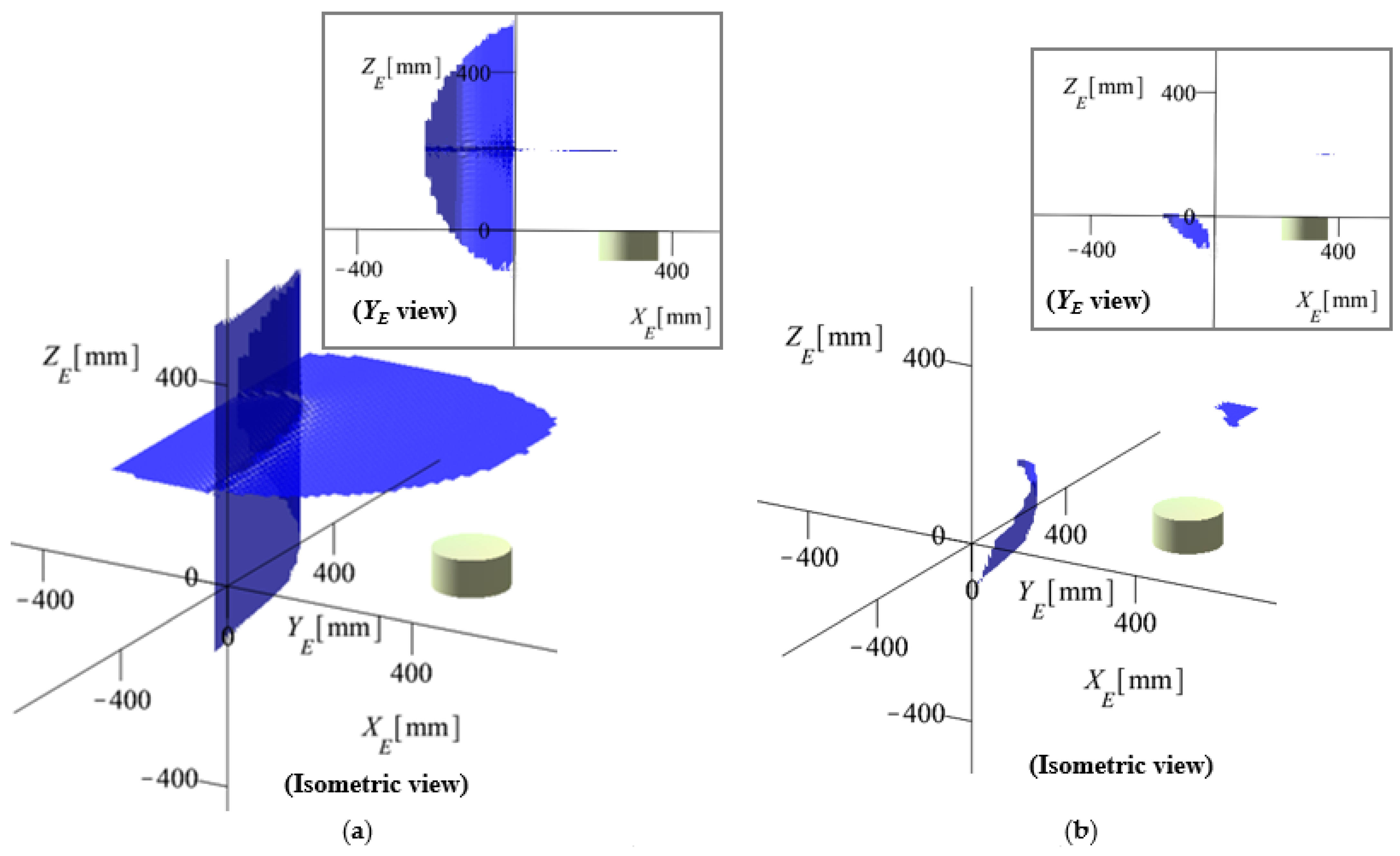
4.2. Type II Singularities
- , which is impossible in the robot design (link lengths cannot be zero);
- , which describes a parametric singularity of the ZYX Euler angles; since the parameter θ describes the second rotation in the ZYX Euler angles, for θ = π/2 there is a gimbal lock, i.e., the parameters ψ and φ describe rotations about the same axis [36].
- . The factor F (shown in Appendix A) could not be further factorized in this work. However, the following relation can be written:
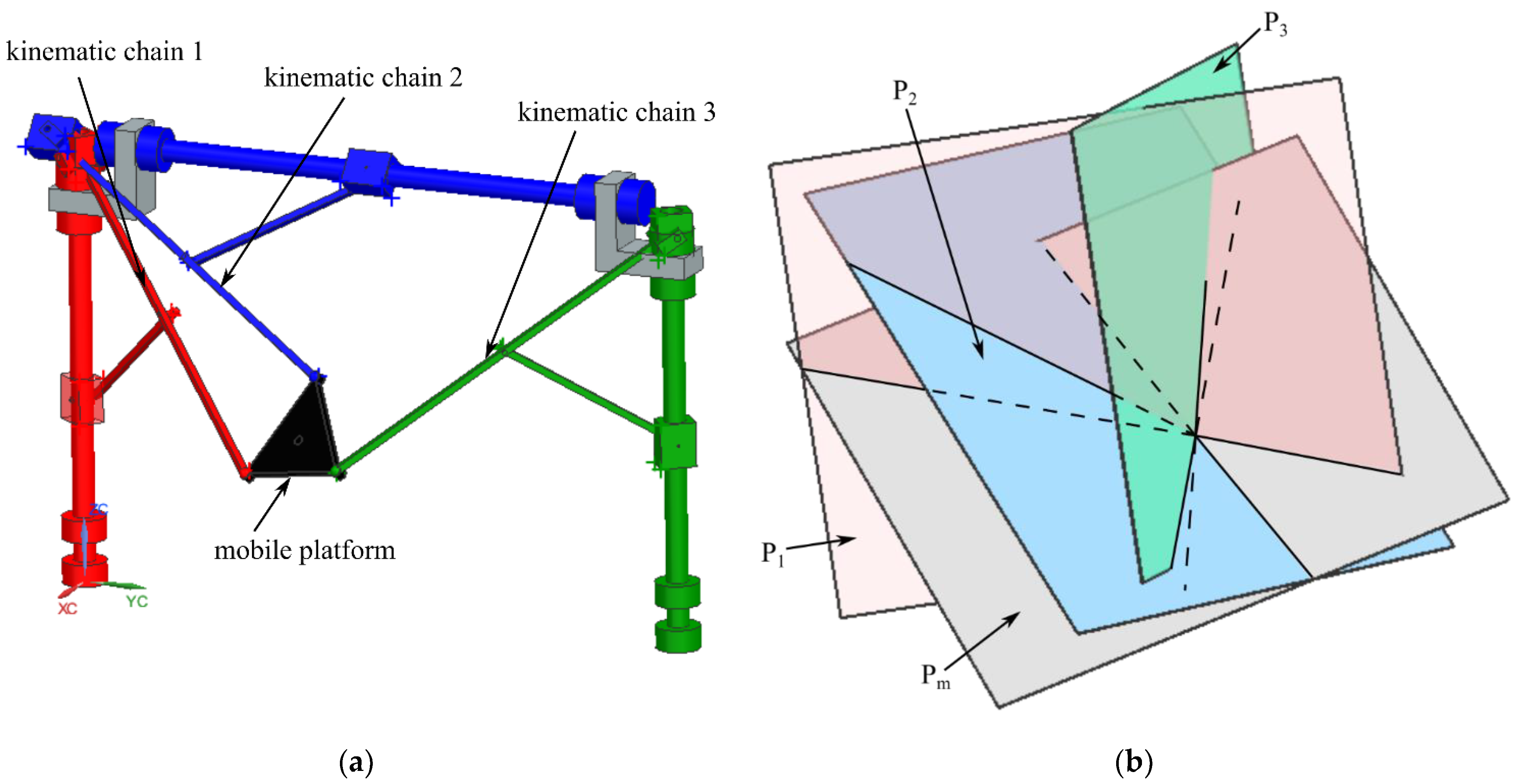
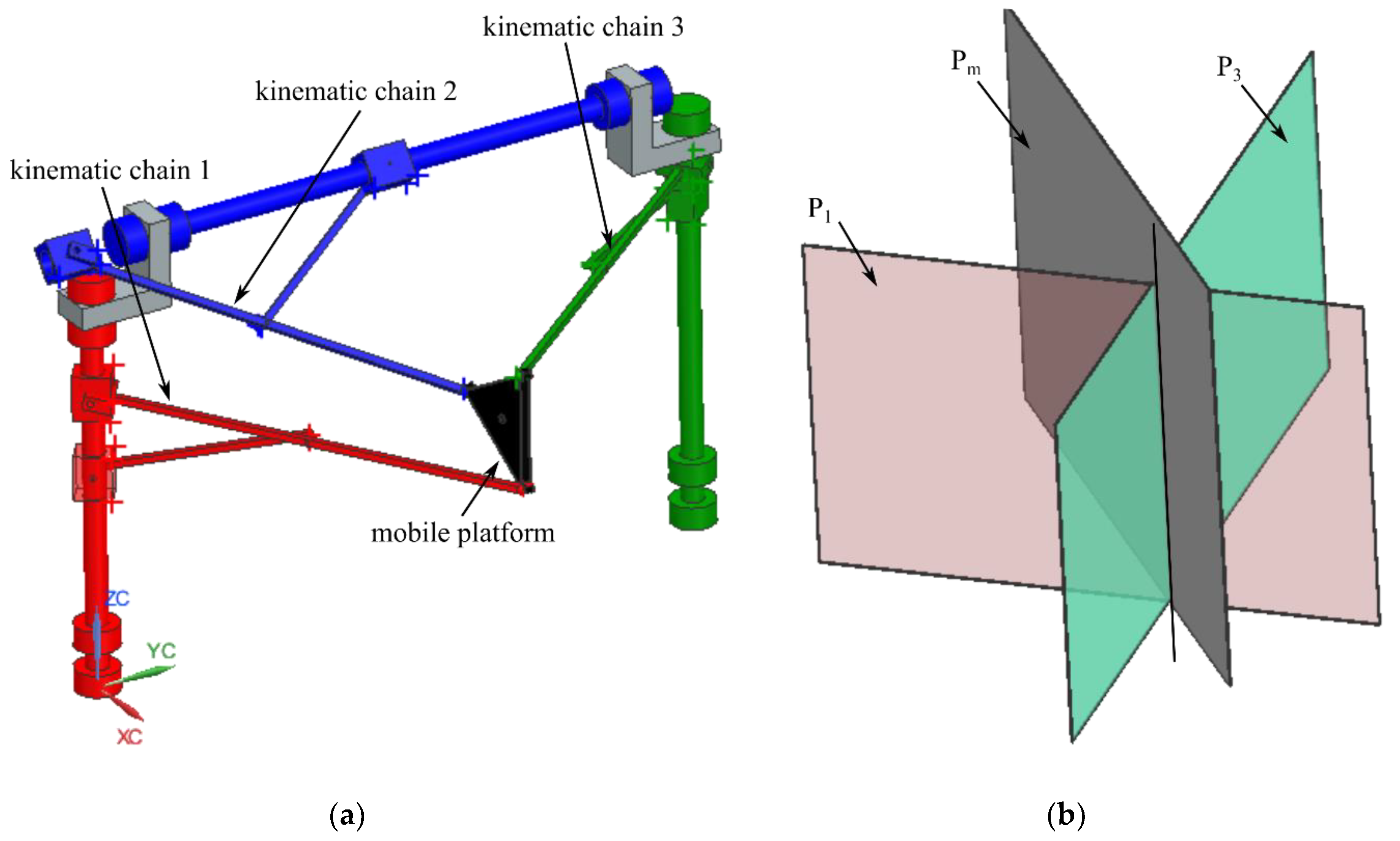
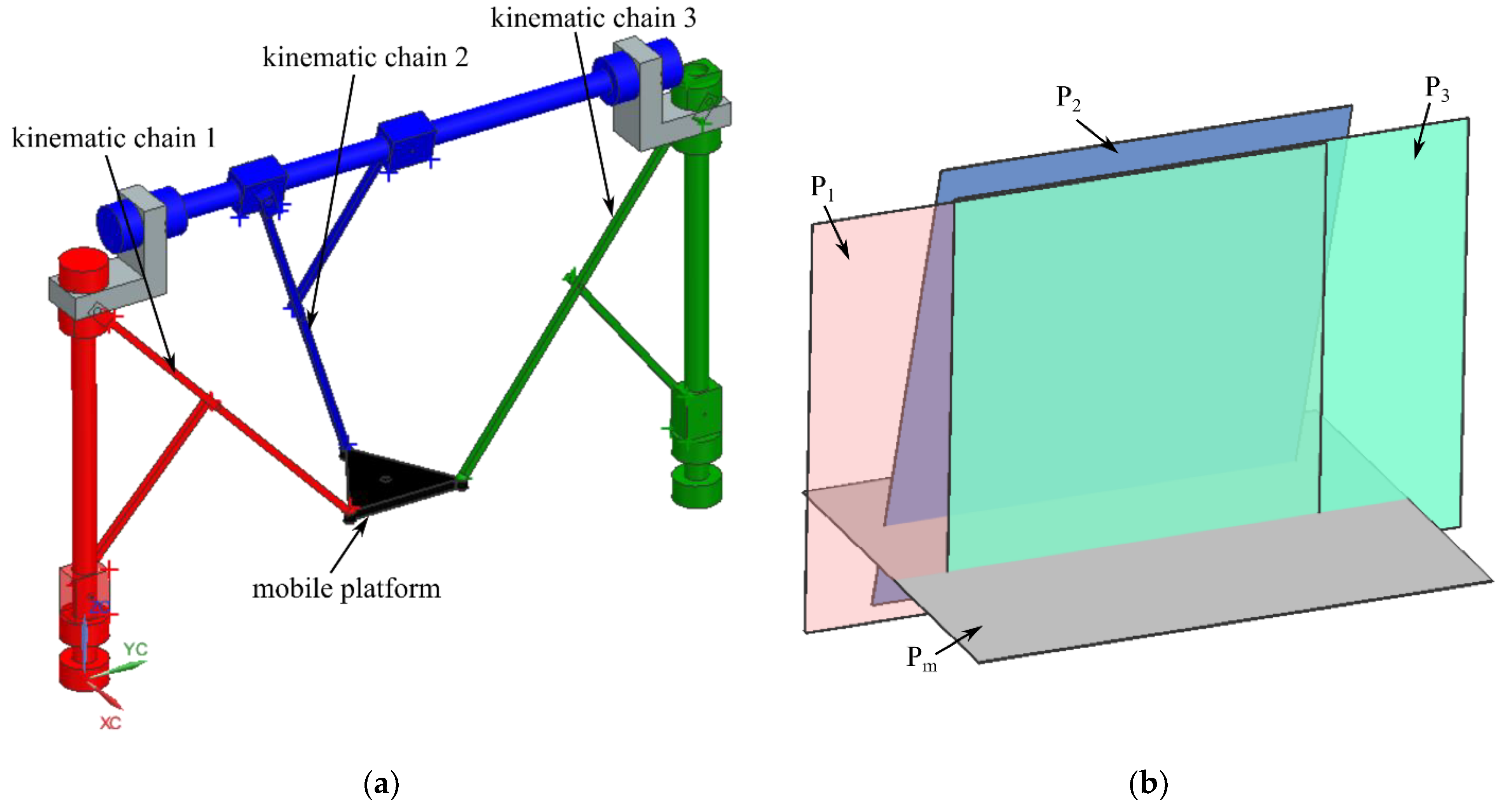
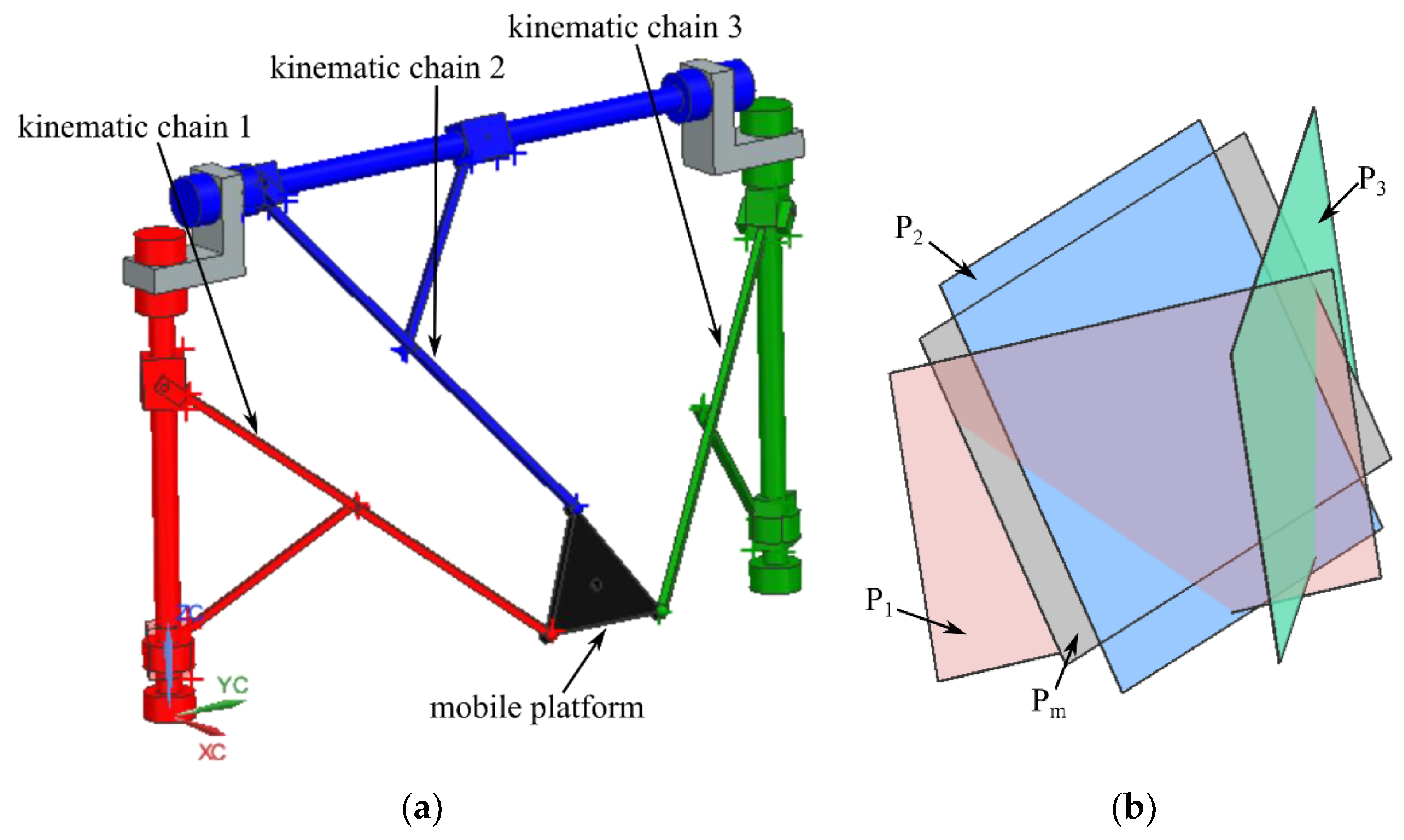
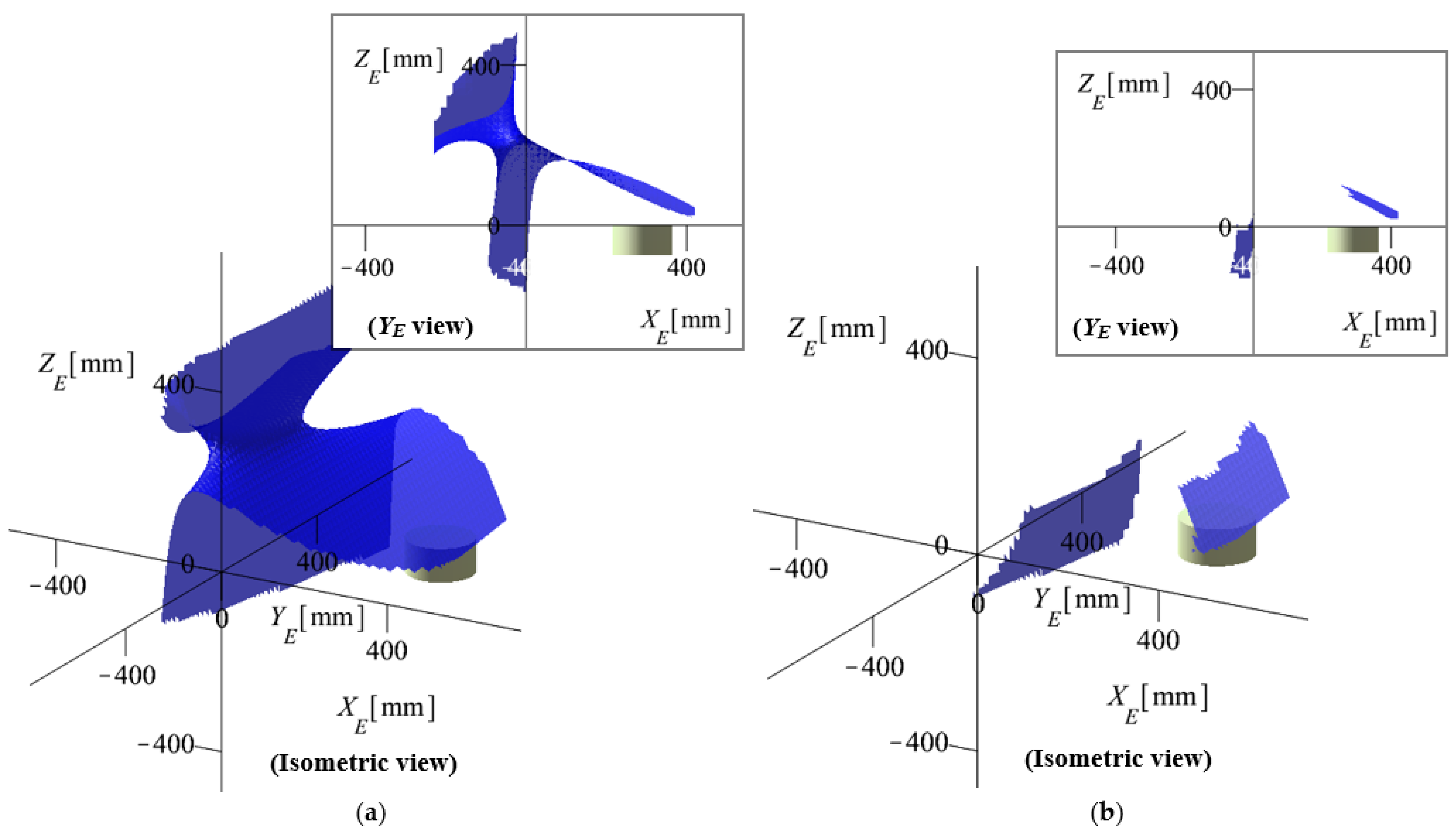
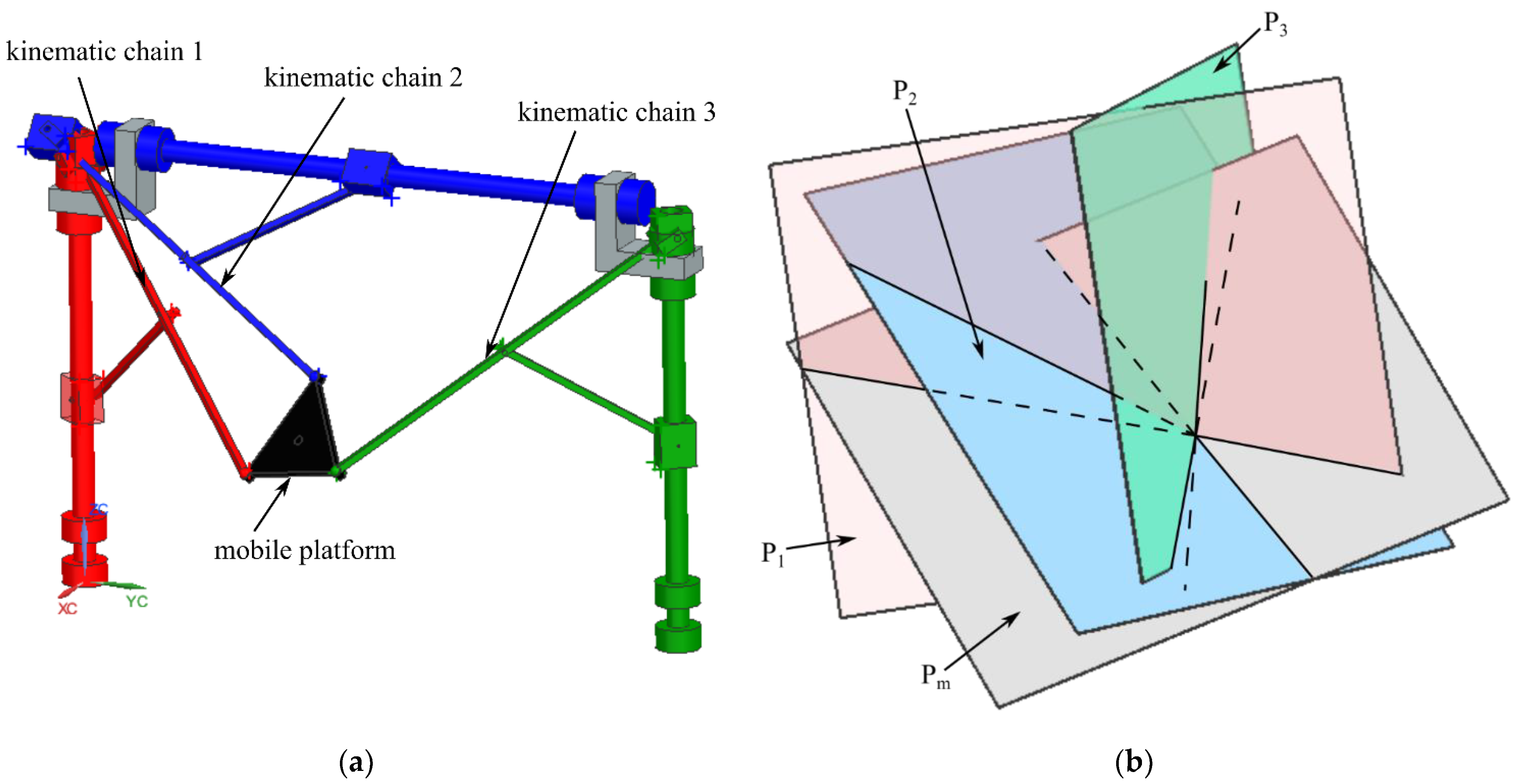
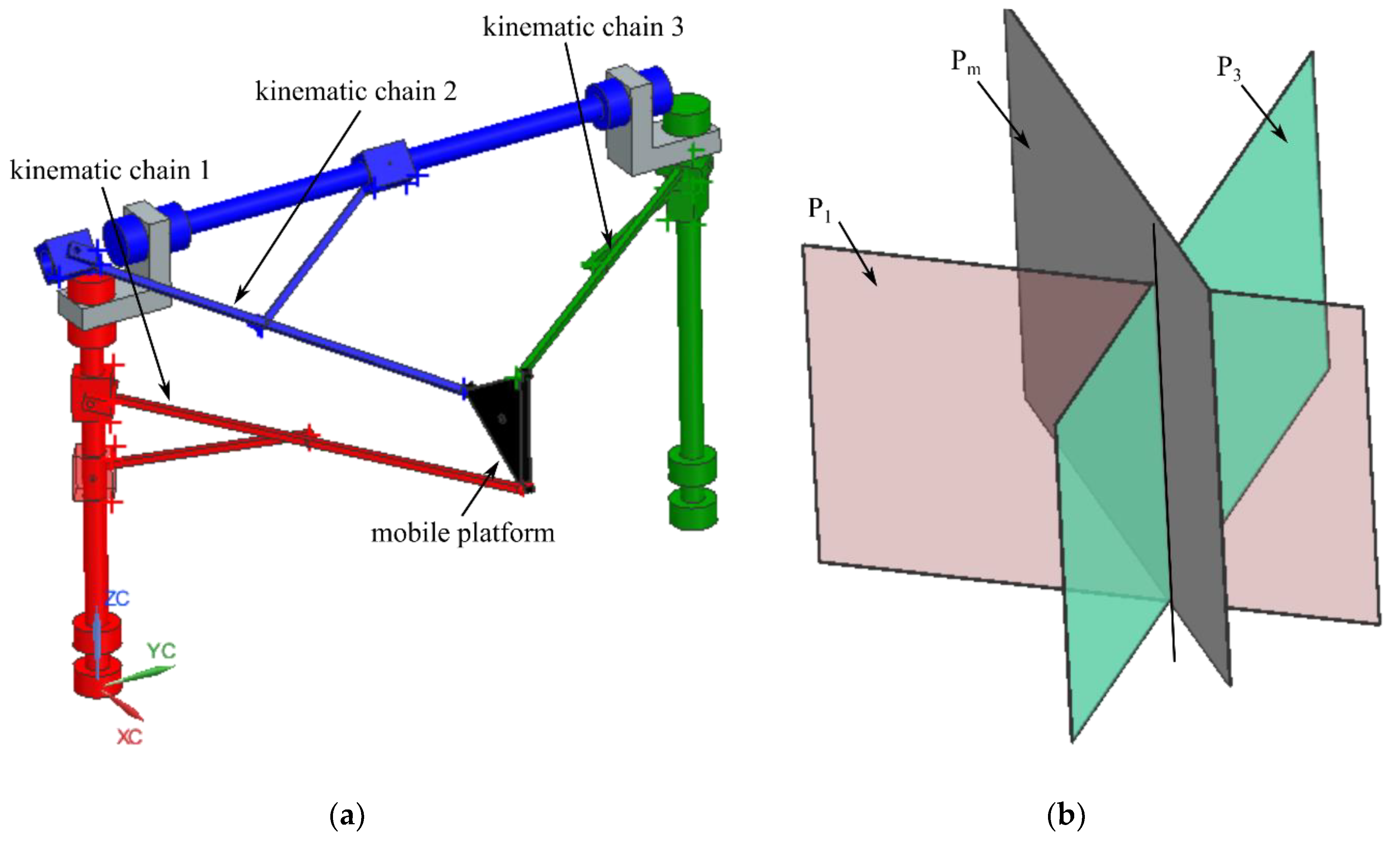
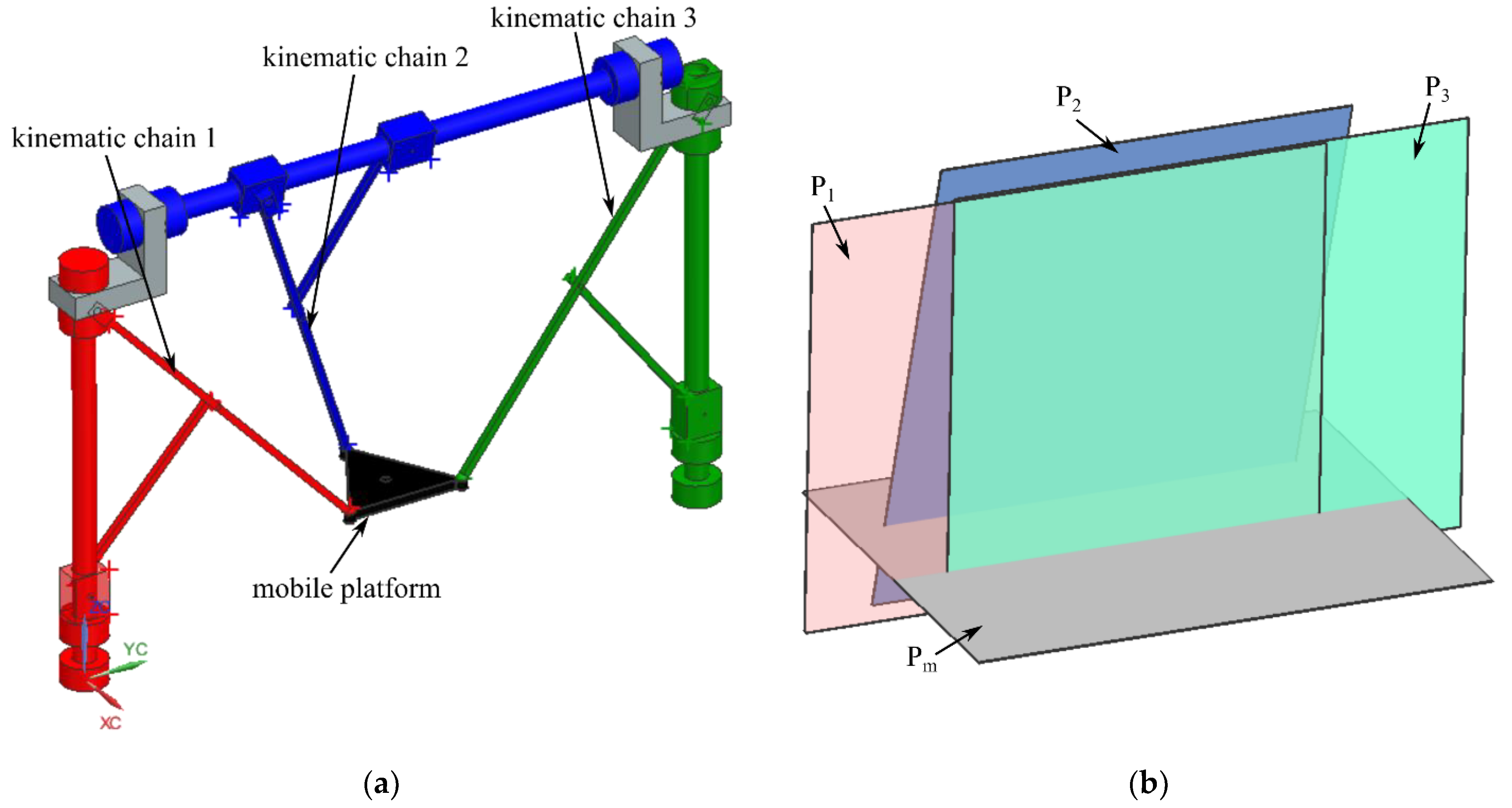
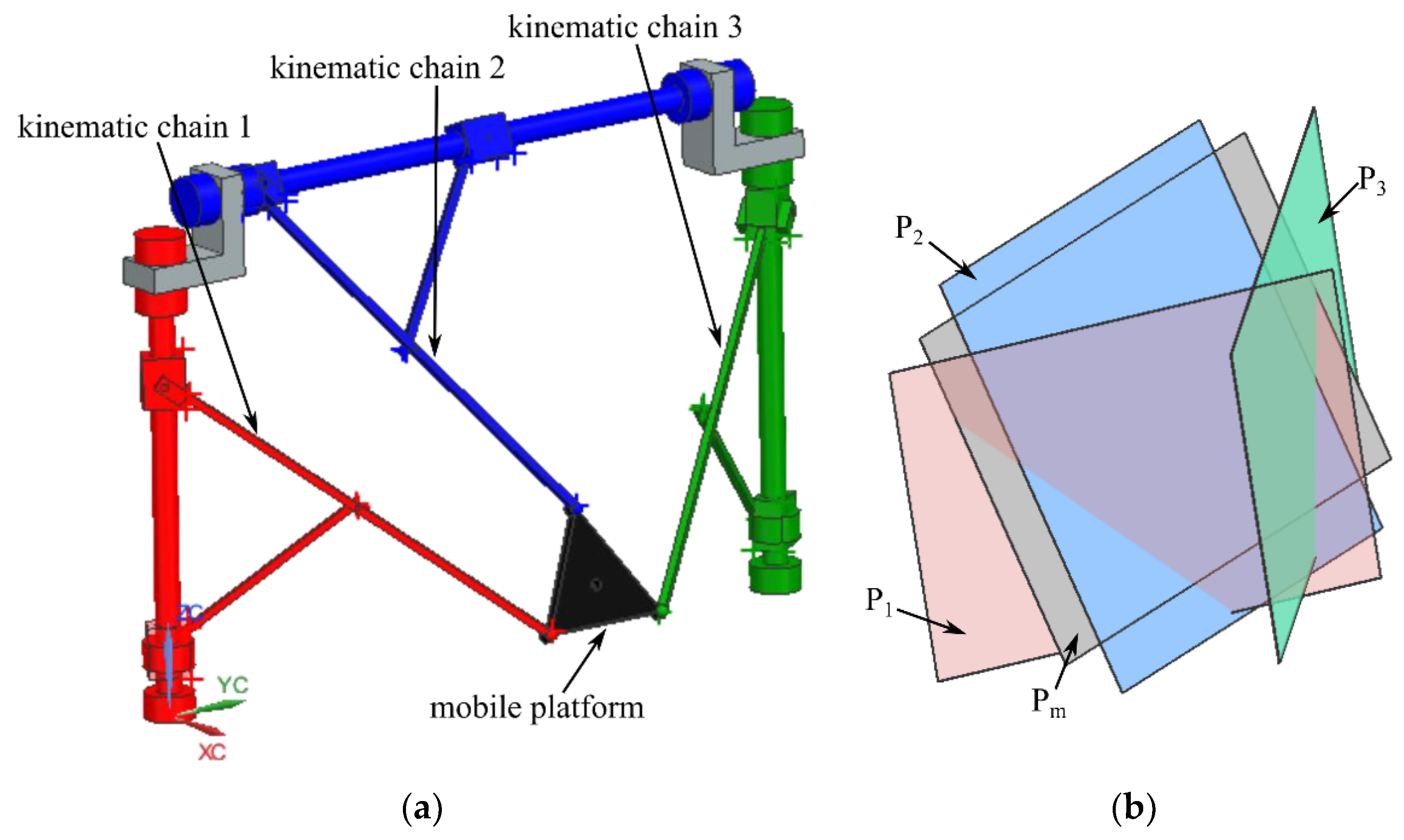
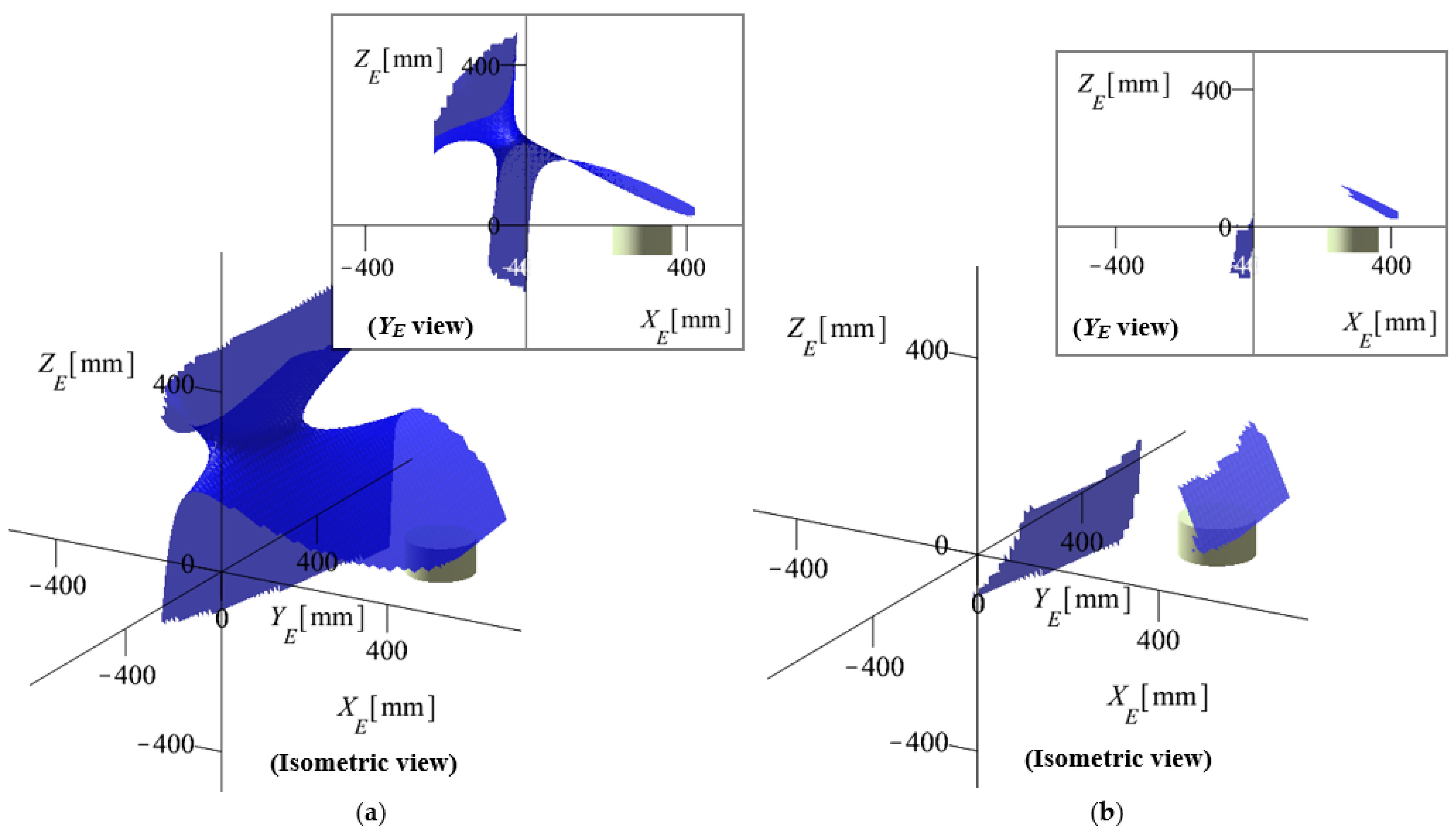
4.3. Type III Singularities
5. Geometric Optimization Algorithm
5.1. Optimization Criteria
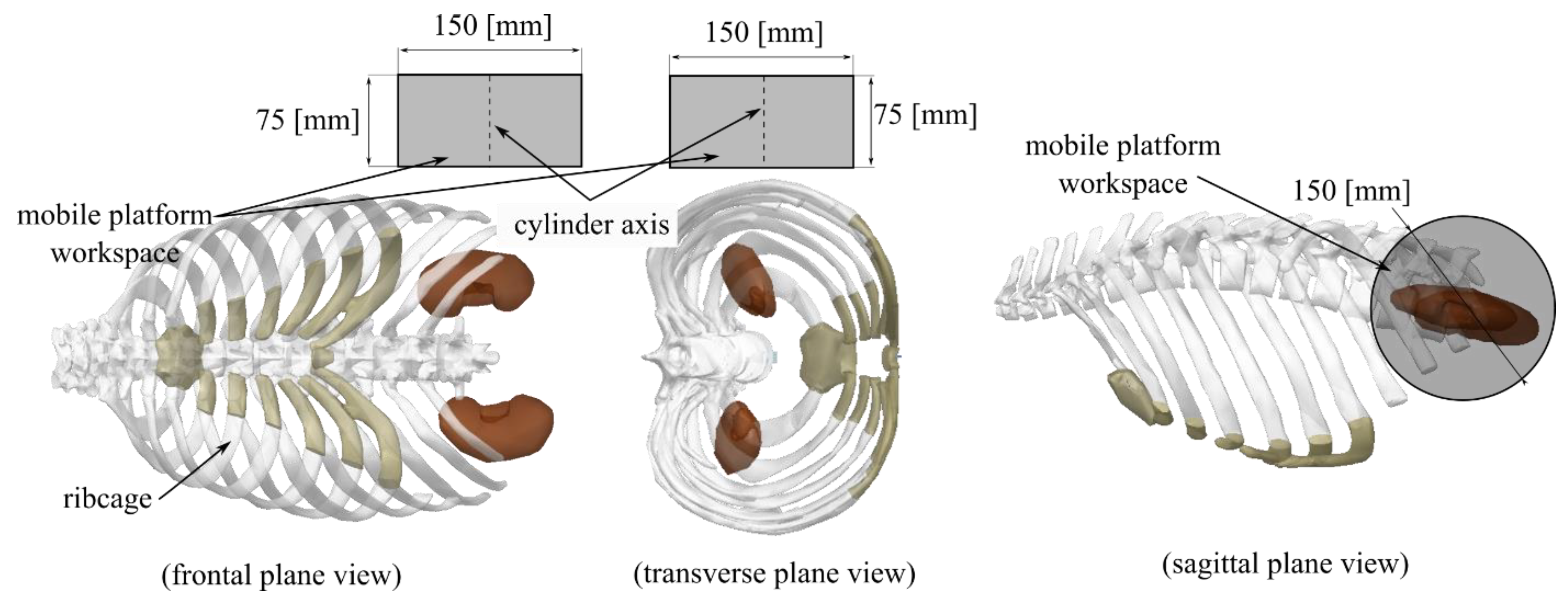
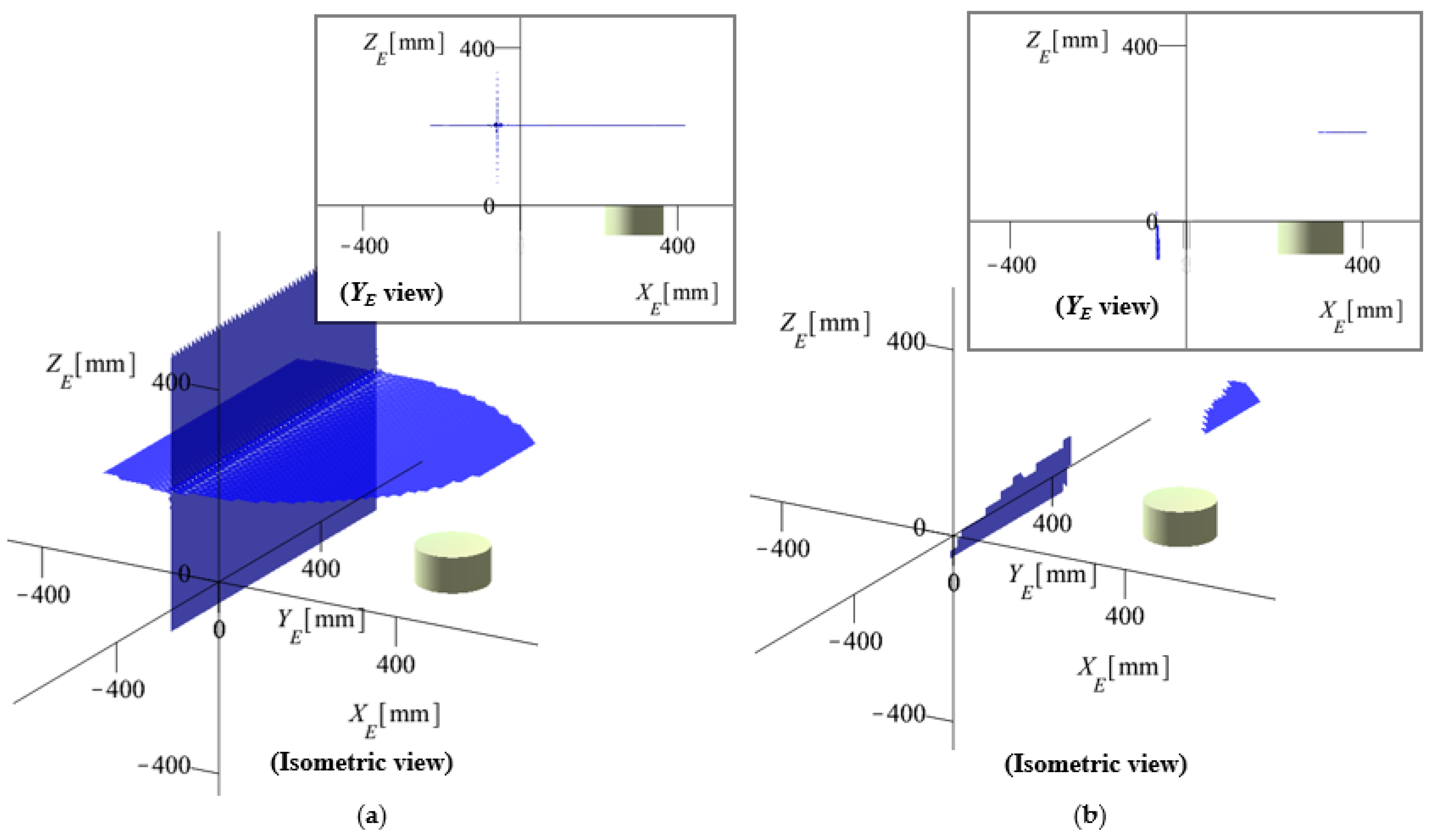
- Criterion 1—Operational workspace. The proposed operational workspace is a cylinder shape (see Section 3). Furthermore, the intervals for the orientation angles of the endoscopic camera must be (for the entire operational workspace):
- Criterion 2—Footprint. To minimize the robot footprint, the following conditions were imposed:
- Criterion 3—Dexterity. The robot should have adequate performance with respect to dexterity. This work uses an approximation of the Global Conditioning Index (GCIa) to assess the 6-DOF parallel robot dexterity which is computed as [16]:
5.2. Geometric Optimization Algorithm Description
| Algorithm 1. The optimization algorithm. |
|
6. The Optimized 6-DOF Parallel Robot for SILS
6.1. The Geometric Optimization
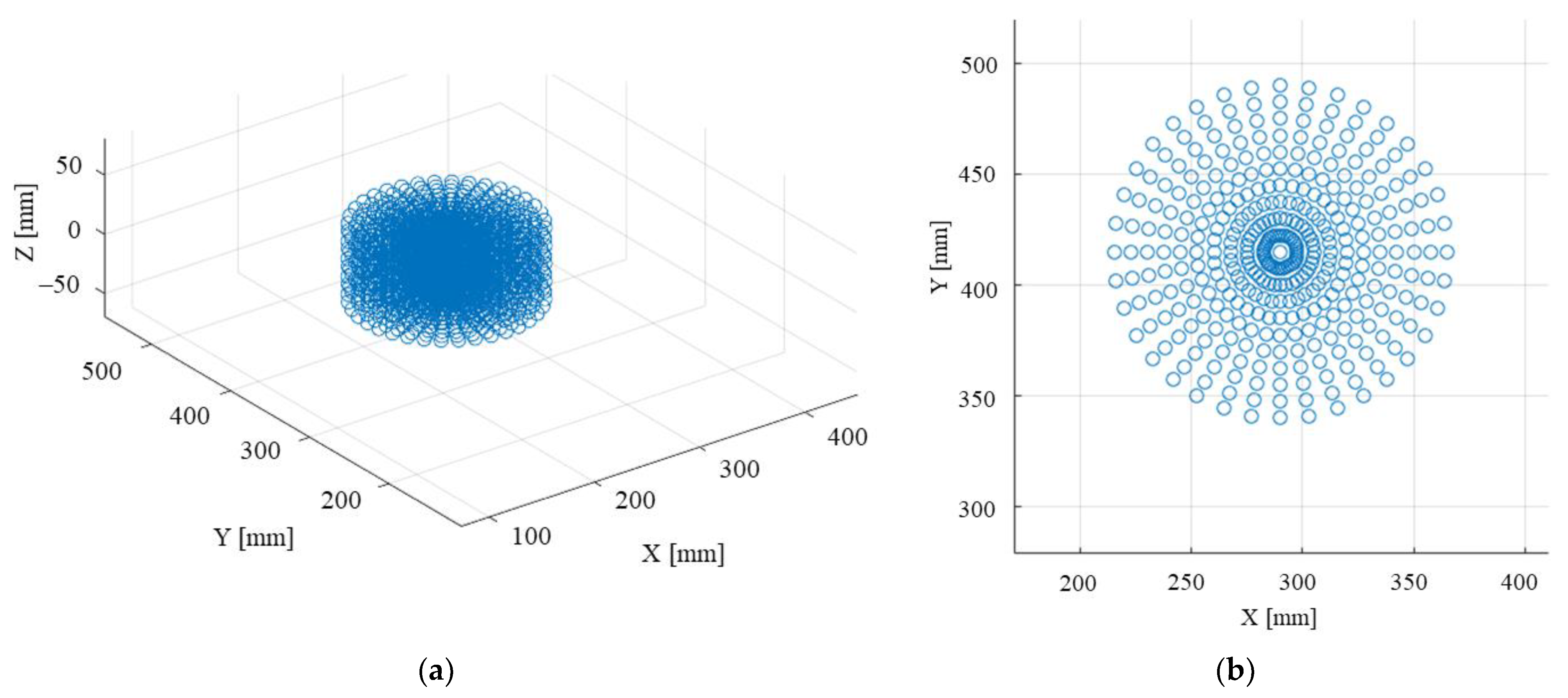
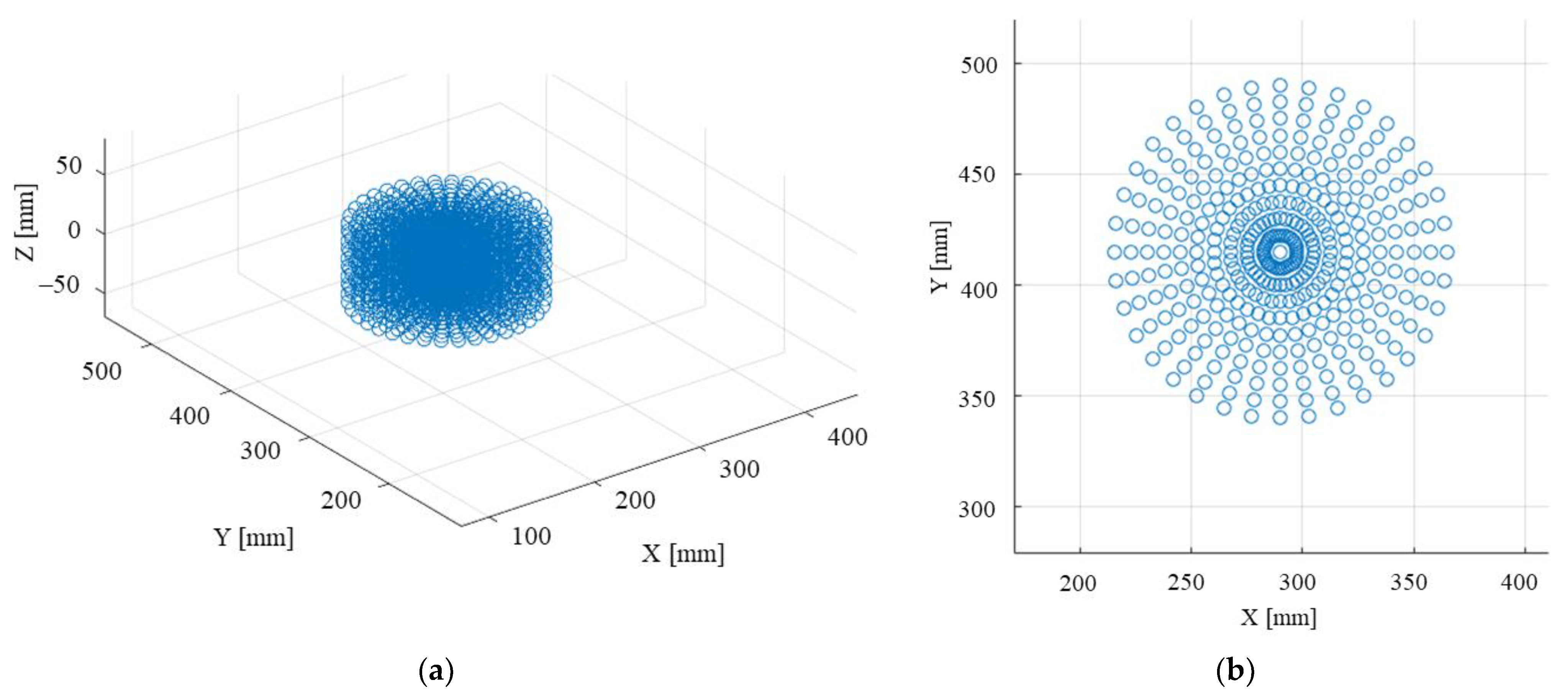
- The test workspace data (WS_DATA) was defined based on a cylinder with:
- The input intervals L for the geometric parameters for the 6-DOF SILS robot where:
- The objective functions OBJ to be minimized (to reduce the size of the robot for a given operational workspace) and the constraints C were:
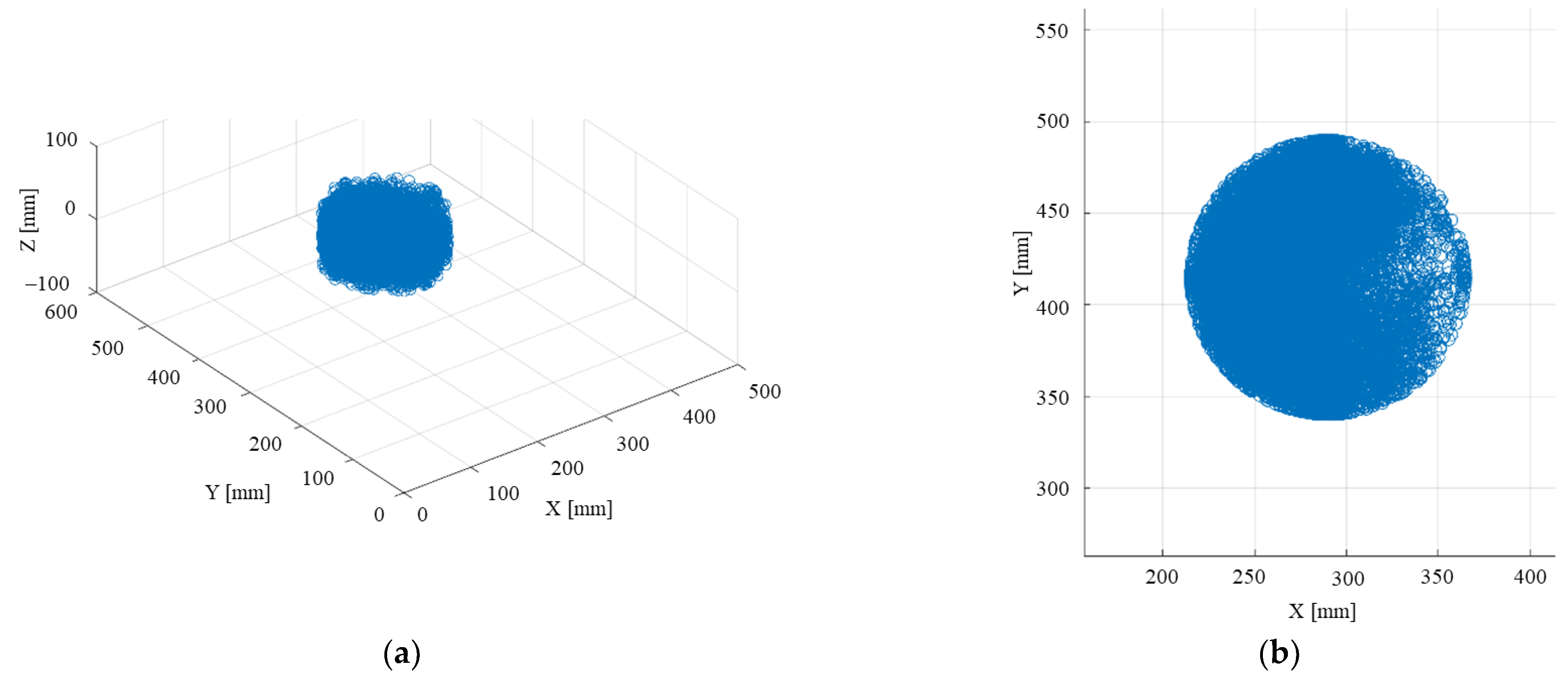
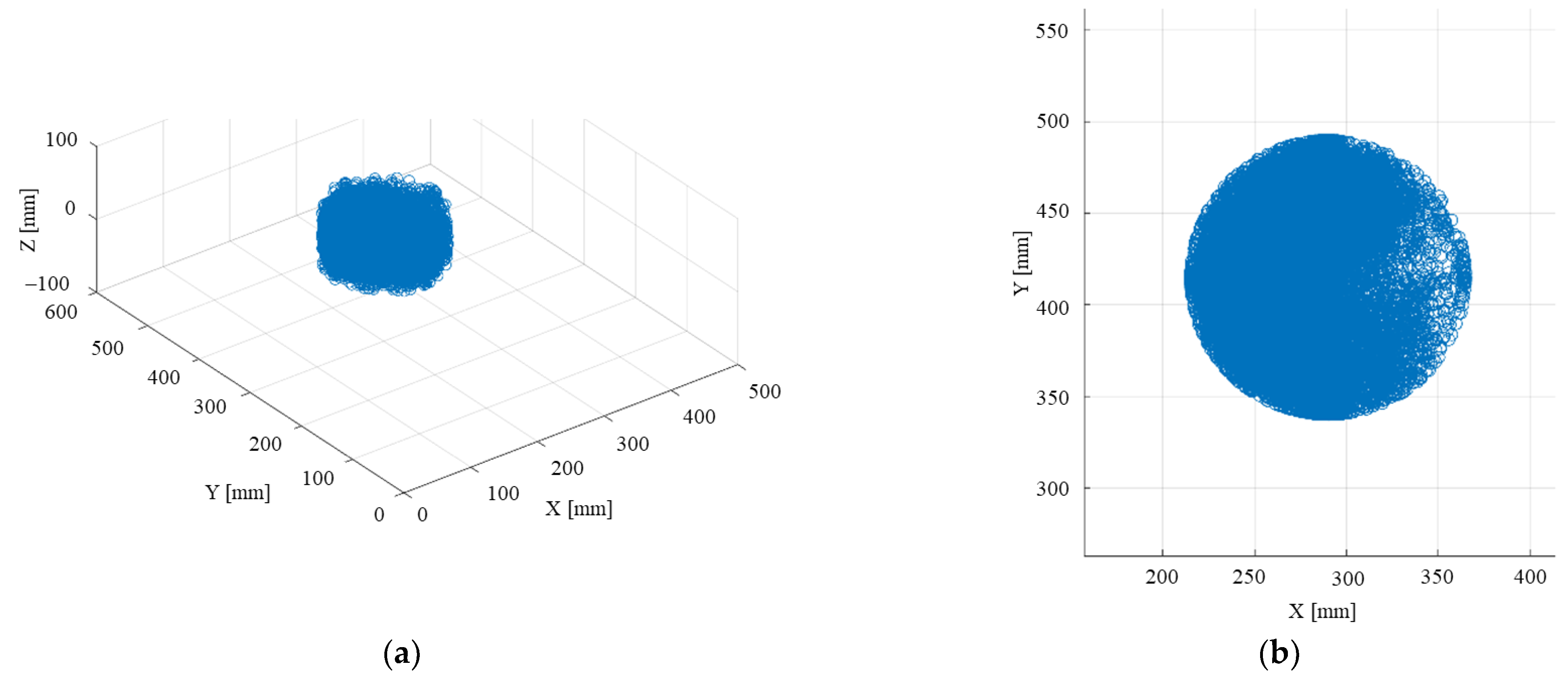
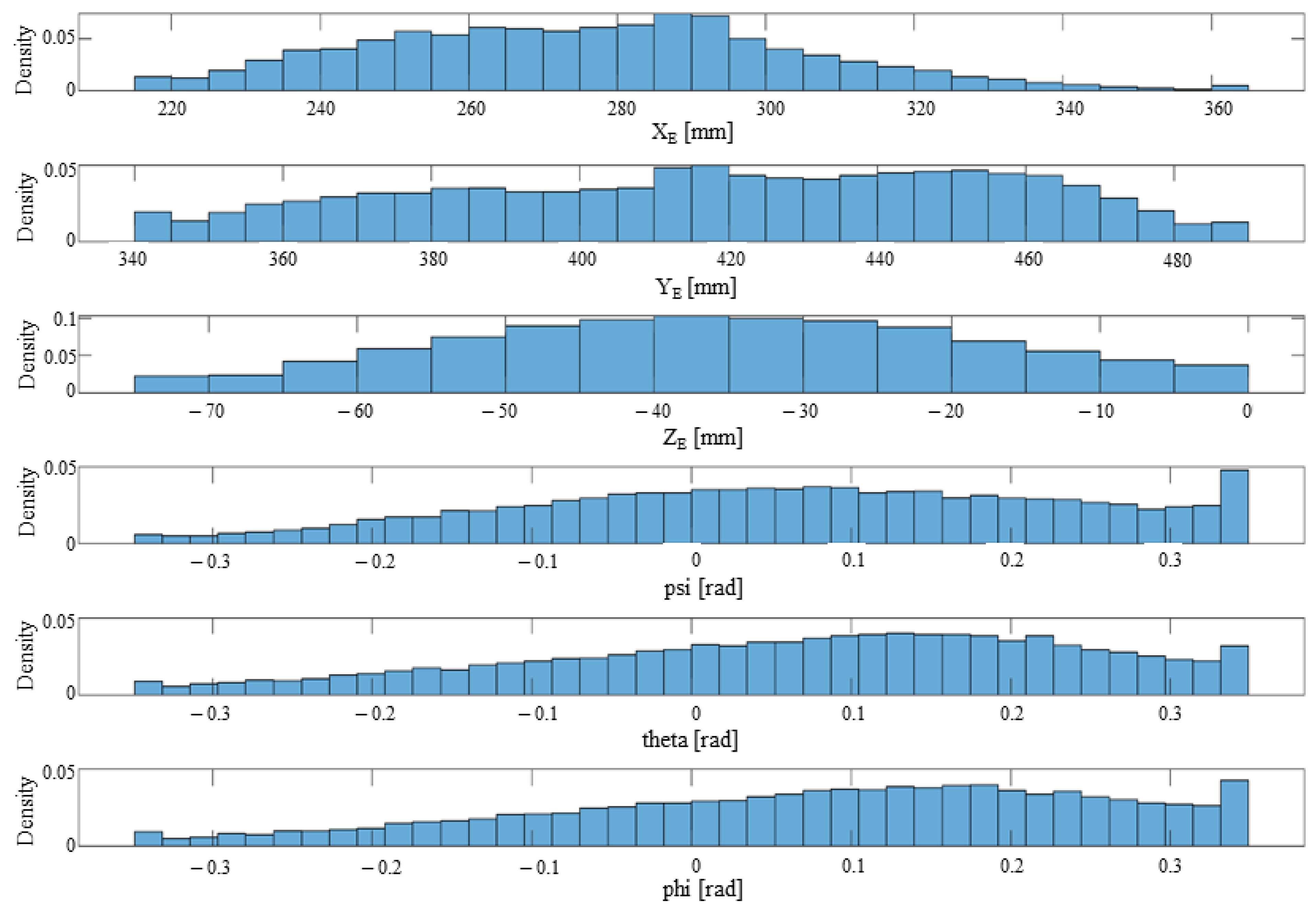
- The gamultiobj function was iterated 200 times with the defined parameters, and with each iteration, the data were saved within the solution set SOLS. The gamultiobj function uses random number generators, and multiple iterations ensured that the optimized solution set spanned the “entire” operational workspace. The hypothesis is that the large number of solutions that spanned the entire operational workspace led to a better probability of finding feasible solutions (that are tested with the WS_DATA) in the next step. The set SOLS(m) (m = 1,…,28,568) includes numerical values for the mobile platform coordinates, the geometric parameters, and the active joints. Figure 15 illustrates a point cloud based on the Cartesian coordinates within SOLS(m) (m = 1,…,28,568), whereas Figure 16 illustrates the distribution of SOLS(m) (m = 1,…,28,568) with respect to the mobile platform coordinates.
- A subset SOL(k) (k = 1, …, 931) was selected from SOLS(m) (m = 1, …, 28,568) which yield real values for qi (i = 1, …, 6) for all mobile platform coordinates in WS_DATA. Furthermore, the ranges Q_RANGE(k) for qi (i = 1, …, 6) of each solution the subset SOL(k) were evaluated to determine which solutions yield feasible mechanisms (where, e.g., the actuation axes do not cross). For the viable solutions FINAL(h) (h = 1, …, 9), the GCI was computed for the WS_DATA. Table 1 shows the resulting feasible solutions (FINAL(h)) for the geometric parameters of the 6-DOF parallel robot for SILS.
- The design solution was Sol. no. 1 from Table 1, not because it has the best value for GCIa, but because it shows a “good” compromise between the footprint (e.g., LH) and the computed GCIa index (it ranks third with respect to LH and first with respect to GCIa). Table 2 shows the ranges of the active joins for the selected design solution.
6.2. The Optimized Model of the 6-DOF Parallel Robot
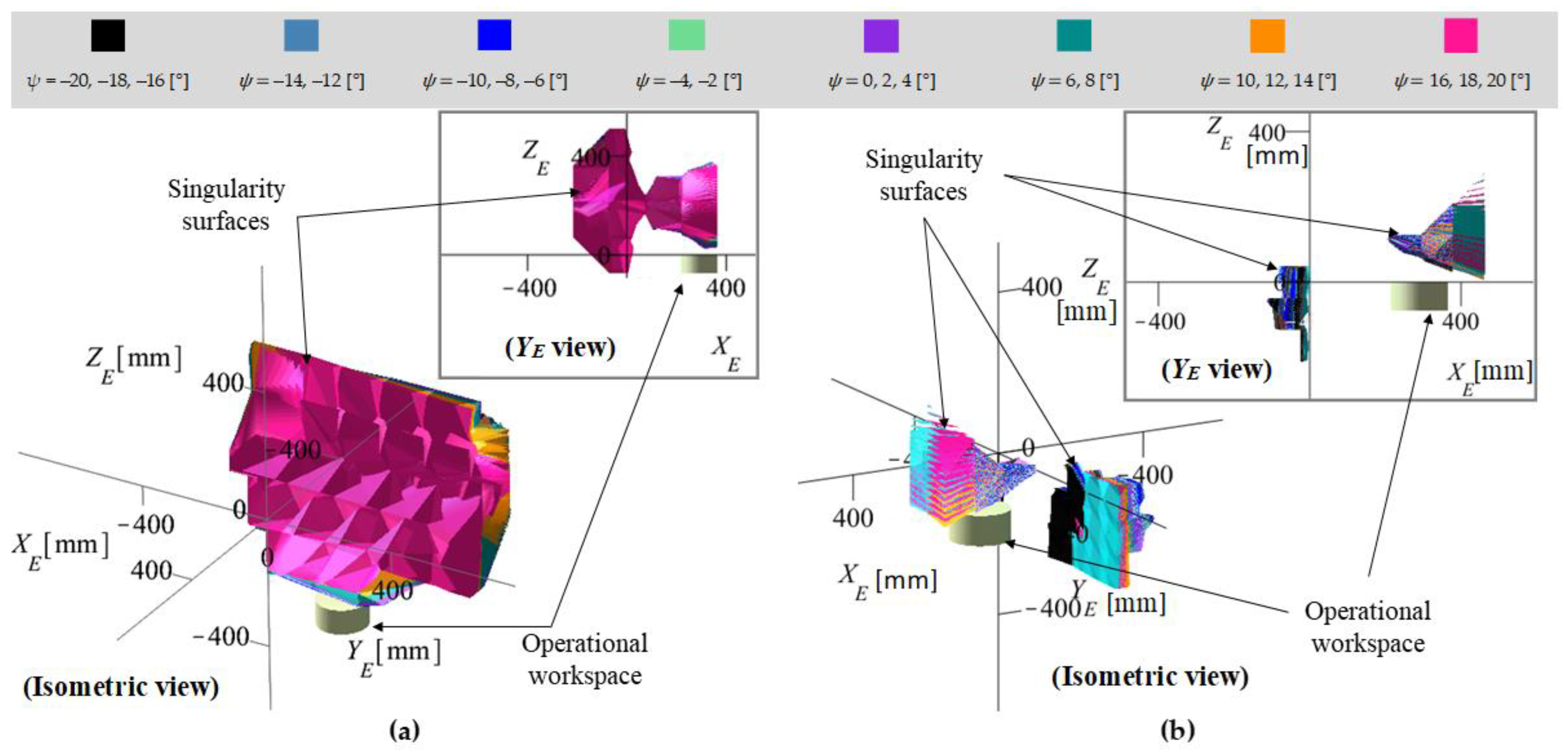
6.3. The Singularities of the Optimized Model of the 6-DOF Parallel Robot
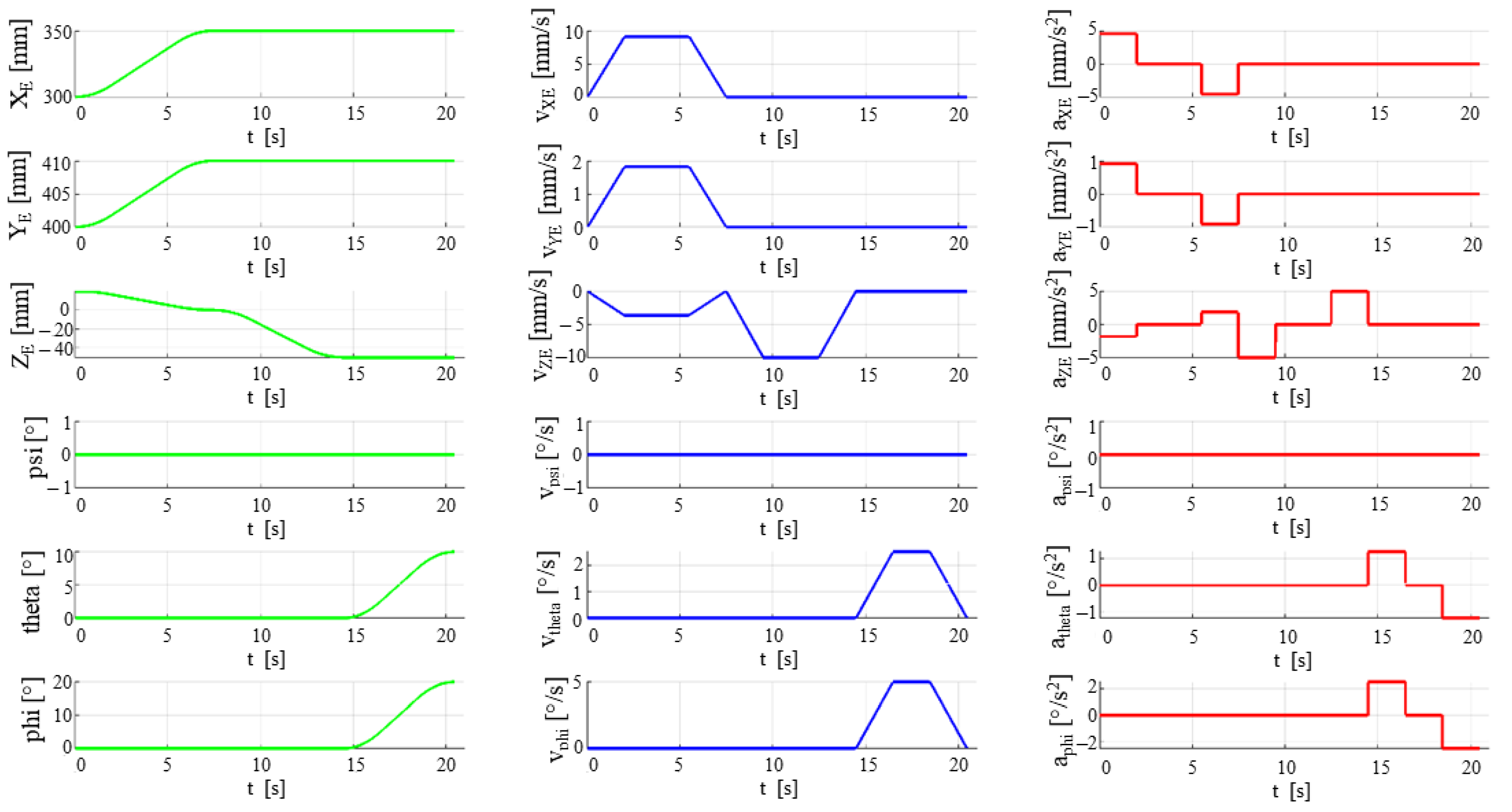
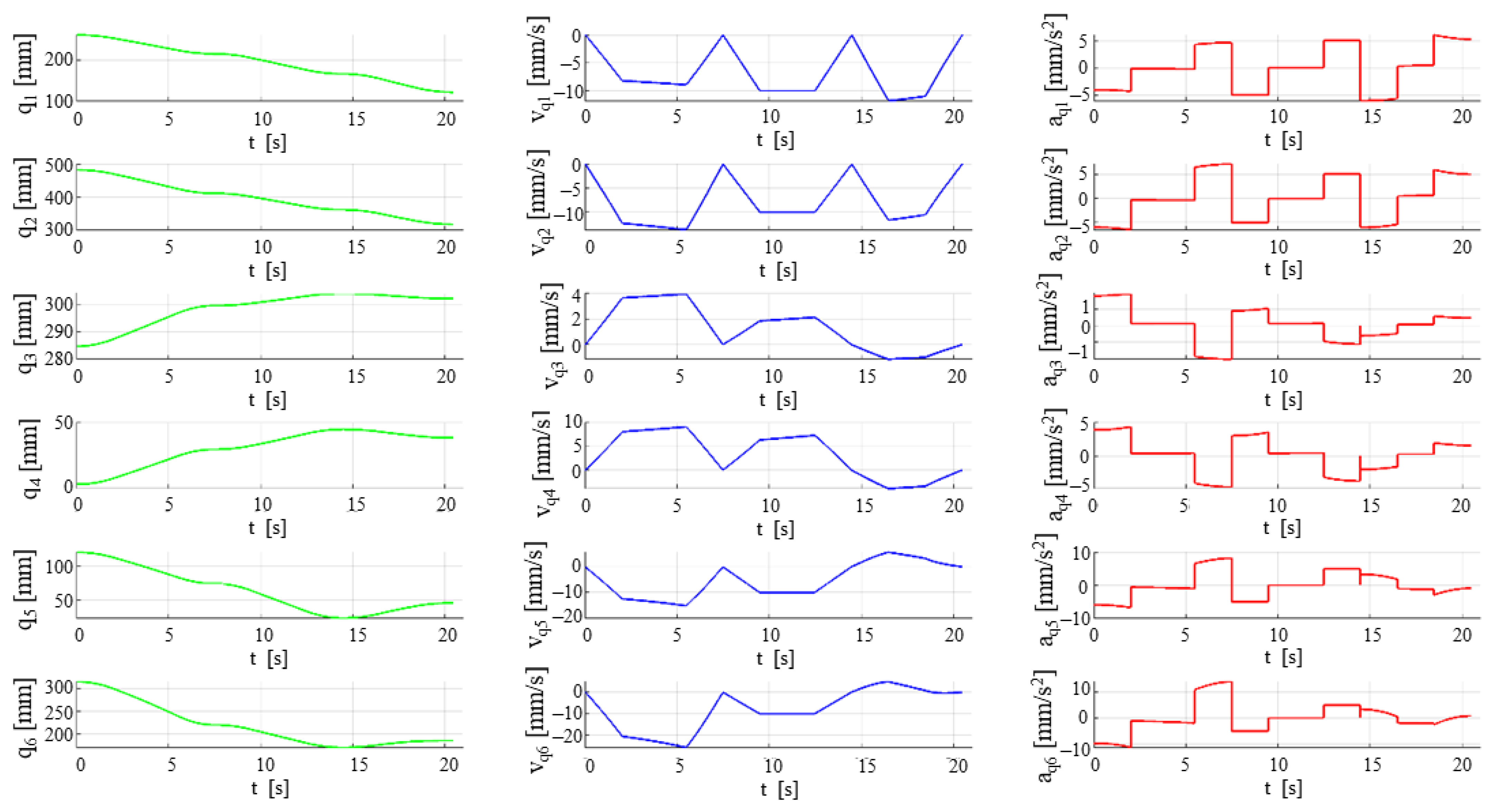
6.4. Numerical Simulations
- ➢
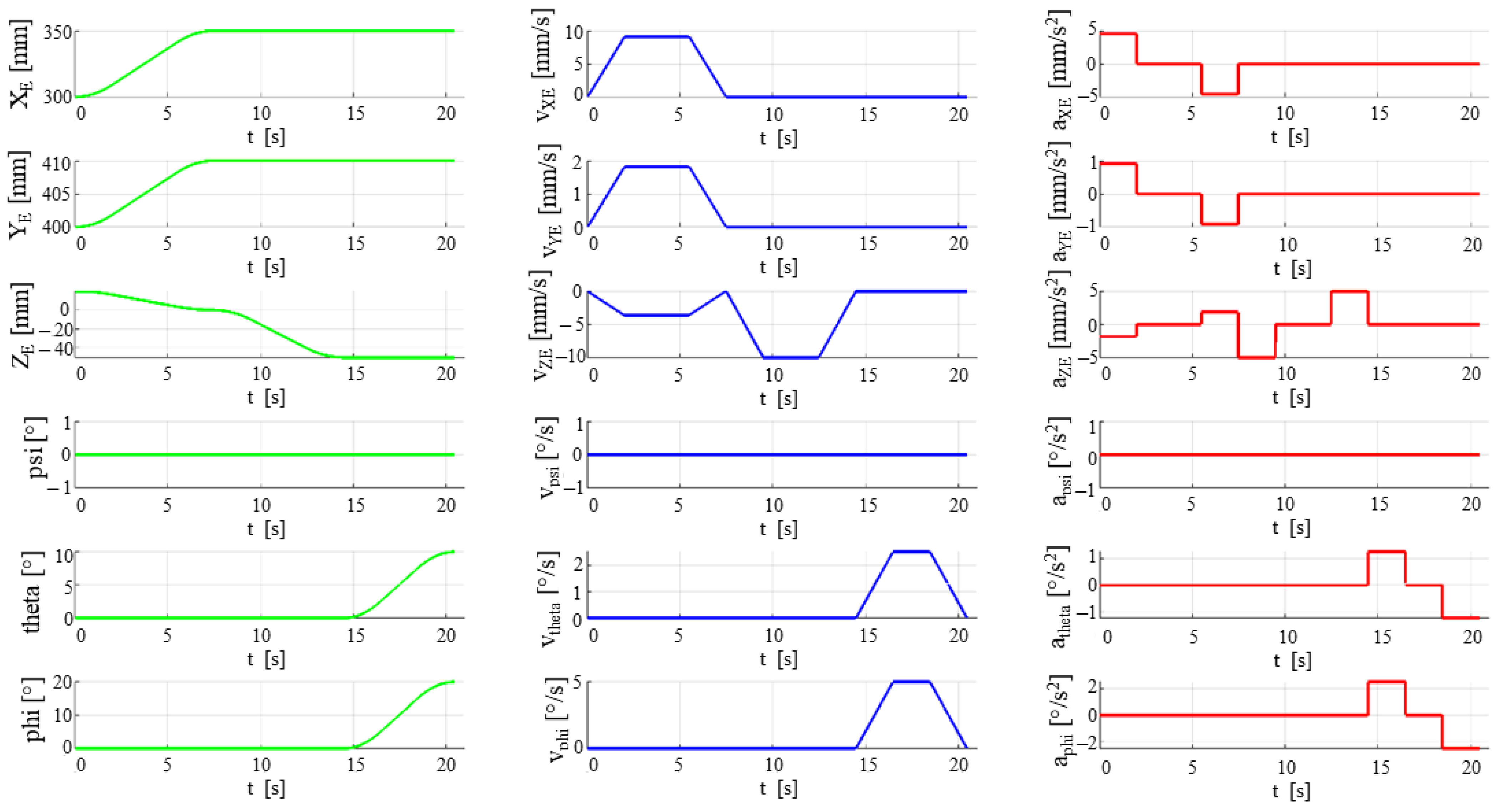
- Stage 1 (align the medical instruments with the insertion points): linear motions from point E1 [X1 = 300, Y1 = 400, Z1 = 20, ψ1 = 0, θ1 = 0, ψ1 = 0] [mm, °] to point E2 [X2 = 350, Y2 = 410, Z2 = 0, ψ2 = 0, θ2 = 0, ψ2 = 0] [mm, °], with maximum velocity v_max = 10 mm/s and maximum acceleration a_max = 5 mm/s2;
- ➢
- Stage 2 (insert the instruments—the mobile platform positions the orientation platform RCM’s at the insertion points): linear motions from point E2 [X2 = 340, Y2 = 410, Z2 = 0, ψ2 = 0, θ2 = 0, ψ2 = 0] [mm, °] to point E3 [X3 = 350, Y3 = 410, Z3 = -50, ψ3 = 0, θ3 = 0, ψ3 = 0] [mm, °], with maximum velocity v_max = 10 mm/s and maximum acceleration a_max = 5 mm/s2;
- ➢
- Stage 3 (reorient the mobile platform): orientation motions from point E3 [X3 = 350, Y3 = 410, Z3 = −50, ψ3 = 0, θ3 = 0, ψ3 = 0] [mm, °] to point E4 [X4 = 350, Y4 = 410, Z4 = −50, ψ4 = 0, θ4 = 10, ψ4 = 20] [mm, °], with maximum v_max = 4 °/s and maximum acceleration a_max = 2 °/s2.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Saidy, M.N.; Tessier, M.; Tessier, D. Single-Incision Laparoscopic Surgery—Hype or Reality: A Historical Control Study. Perm. J. 2012, 16, 47–50. [Google Scholar] [CrossRef] [PubMed]
- Ghezzi, T.L.; Corleta, O.C. 30 Years of Robotic Surgery. World J. Surg. 2016, 40, 2550–2557. [Google Scholar] [CrossRef] [PubMed]
- Pisla, D.; Andras, I.; Vaida, C.; Crisan, N.; Ulinici, I.; Birlescu, I.; Plitea, N. New approach to hybrid robotic system application in Single Incision Laparoscopic Surgery. Acta Teh. Napoc. 2021, 64, 369–378. [Google Scholar]
- Peters, B.S.; Armijo, P.R.; Krause, C.; Choudhury, S.A.; Oleynikov, D. Review of emerging surgical robotic technology. Surg. Endosc. 2018, 32, 1636–1655. [Google Scholar] [CrossRef] [PubMed]
- Kuo, C.-H.; Dai, J.S. Robotics for Minimally Invasive Surgery: A Historical Review from the Perspective of Kinematics. In International Symposium on History of Machines and Mechanisms; Yan, H.S., Ceccarelli, M., Eds.; Springer: Dordrecht, The Netherlands, 2009; pp. 337–354. [Google Scholar]
- Horgan, S.; Vanuno, D. Robots in laparoscopic surgery. J. Laparoendosc. Adv. Surg. Tech. 2001, 11, 415–419. [Google Scholar] [CrossRef]
- Beatrice, A.; Matthew, J.C.; Danail, S. Gesture Recognition in Robotic Surgery: A Review. IEEE Trans. Biomed. Eng. 2021, 68, 2021–2035. [Google Scholar]
- Saeidi, H.; Opfermann, J.D.; Kam, M.; Raghunathan, S.; Leonard, S.; Krieger, A. A Confidence-Based Shared Control Strategy for the Smart Tissue Autonomous Robot (STAR). In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1268–1275. [Google Scholar]
- Bhandari, M.; Zeffiro, T.; Reddiboina, M. Artificial intelligence and robotic surgery. Curr. Opin. Urol. 2020, 30, 48–54. [Google Scholar] [CrossRef]
- Harky, A.; Chaplin, G.; Chan, J.S.K.; Eriksen, P.; MacCarthy-Ofosu, B.; Theologou, T.; Muir, A.D. The Future of Open Heart Surgery in the Era of Robotic and Minimal Surgical Interventions. Hear. Lung Circ. 2019, 29, 49–61. [Google Scholar] [CrossRef]
- Wang, W.; Sun, X.; Wei, F. Laparoscopic surgery and robotic surgery for single-incision cholecystectomy: An updated systematic review. Updat. Surg. 2021, 73, 2039–2046. [Google Scholar] [CrossRef]
- Kwak, Y.H.; Lee, H.; Seon, K.; Lee, Y.J.; Lee, Y.J.; Kim, S.W. Da Vinci SP Single-Port Robotic Surgery in Gynecologic Tumors: Single Surgeon’s Initial Experience with 100 Cases. Yonsei Med. J. 2022, 63, 179–186. [Google Scholar] [CrossRef]
- McCarus, S.D. Senhance Robotic Platform System for Gynecological Surgery. JSLS J. Soc. Laparoendosc. Surg. 2021, 25, e2020.00075. [Google Scholar] [CrossRef]
- Laribi, M.A.; Mlika, A.; Romdhane, L.; Zeghloul, S. Robust Optimization of the RAF Parallel Robot for a Prescribed Workspace. In Computational Kinematics. Mechanisms and Machine Science; Zeghloul, S., Romdhane, L., Laribi, M., Eds.; Springer: Cham, Switzerland, 2018; Volume 50, pp. 383–393. [Google Scholar] [CrossRef]
- Hay, A.M.; Snyman, J.A. Optimal synthesis for a continuous prescribed dexterity interval of a 3-dof parallel planar manipulator for different prescribed output workspaces. Int. J. Numer. Methods Eng. 2006, 68, 1–12. [Google Scholar] [CrossRef]
- Merlet, J.P. Jacobian, manipulability, condition number, and accuracy of parallel robots. ASME J. Mech. Des. 2006, 128, 199–206. [Google Scholar] [CrossRef]
- Gosselin, C.; Angeles, J. A global performance index for the kinematic optimization of robotic manipulators. ASME. J. Mech. Des. 1991, 113, 220–226. [Google Scholar] [CrossRef]
- Itul, T.P.; Galdau, B.; Pisla, D.L. Static analysis and stiffness of a 2-dof parallel device for orientation. Acta Tech. Napoc. Ser. Appl. Math. Mech. Eng. 2012, 55, 615–620. [Google Scholar]
- Chablat, D.; Wenger, P. Architecture optimization of a 3-DOF translational parallel mechanism for machining applications, the orthoglide. IEEE Trans. Robot. Autom. 2003, 19, 403–410. [Google Scholar] [CrossRef]
- Dastjerdi, A.H.; Sheikhi, M.M.; Masouleh, M.T. A complete analytical solution for the dimensional synthesis of 3-DOF delta parallel robot for a prescribed workspace. Mech. Mach. Theory 2020, 153, 103991. [Google Scholar] [CrossRef]
- Courteille, E.; Deblaise, D.; Maurine, P. Design optimization of a Delta-like parallel robot through global stiffness performance evaluation. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5159–5166. [Google Scholar] [CrossRef]
- Wang, A.U.; Rong, W.B.; Qi, L.M.; Qin, Z.G. Optimal design of a 6-DOF parallel robot for precise manipulation. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009. [Google Scholar]
- Qiang, H.; Wang, L.; Ding, J.; Zhang, L. Multiobjective Optimization of 6-DOF parallel manipulator for desired total orientation workspace. Math. Probl. Eng. 2019, 2019, 5353825. [Google Scholar] [CrossRef]
- Aboulissane, B.; Haiek, D.E.; Bakkali, L.E.; Bahaoui, J.E. On the workspace optimization of parallel robots based on CAD approach. Procedia Manuf. 2019, 32, 1085–1092. [Google Scholar] [CrossRef]
- Surbhil, G.; Sankho, T.S.; Amod, K. Design optimization of minimally invasive surgical robot. Appl. Soft Comput. 2015, 32, 241–249. [Google Scholar]
- Lessard, S.; Bigras, P.; Bonev, I.A. A New Medical Parallel Robot and Its Static Balancing Optimization. J. Med. Devices 2007, 1, 272–278. [Google Scholar] [CrossRef]
- Pisla, D.; Pusca, A.; Tucan, P.; Gherman, B.; Vaida, C. Kinematics and workspace analysis of an innovative 6-dof parallel robot for SILS. Proc. Rom. Acad. Ser. A, 2022; in press. [Google Scholar]
- Pisla, D.; Carami, D.; Gherman, B.; Soleti, G.; Ulinici, I.; Vaida, C. A novel control architecture for robotic-assisted single incision laparoscopic surgery. Rom. J. Tech. Sciences. Appl. Mech. 2021, 66, 141–162. [Google Scholar]
- Birlescu, I.; Vaida, C.; Pusca, A.; Rus, G.; Pisla, D. A New Approach to Forward Kinematics for a SILS Robotic Orientation Platform Based on Perturbation Theory. In Advances in Robot Kinematics 2022; Altuzarra, O., Kecskeméthy, A., Eds.; Springer: Cham, Switzerland, 2022; Volume 24, pp. 171–178. [Google Scholar] [CrossRef]
- Ebert-Uphoff, I.; Lee, J.-K.; Lipkin, H. Characteristic tetrahedron of wrench singularities for parallel manipulators with three legs. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2002, 216, 81–93. [Google Scholar] [CrossRef]
- MathWorks. gamultiobj. Available online: https://ch.mathworks.com/help/gads/gamultiobj.html (accessed on 1 July 2022).
- Pisla, D.; Birlescu, I.; Vaida, C.; Tucan, P.; Gherman, B.; Plitea, N. Family of Modular Parallel Robots with Active Translational Joints for Single Incision Laparoscopic Surgery. OSIM A00733, 3 December 2021. [Google Scholar]
- Gosselin, C.; Angeles, J. Singularity analysis of closed-loop kinematic chains. IEEE Trans. Robot. Autom. 1990, 6, 281–290. [Google Scholar] [CrossRef]
- Zlatanov, D.; Fenton, R.G.; Benhabib, B. A Unifying Framework for Classification and Interpretation of Mechanism Singularities. J. Mech. Des. 1995, 117, 566–572. [Google Scholar] [CrossRef]
- Ma, O.; Angeles, J. Architecture singularities of platform manipulators. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 1542–1547. [Google Scholar]
- Spring, I.W. Euler parameters and the use of quaternion algebra in the manipulation of finite rotations. Mech. Mach. Theory 1986, 21, 365–373. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A Fast Elitist Non-dominated Sorting Genetic Algorithm for Multi-objective Optimization: NSGA-II. In PPSN 2000: Parallel Problem Solving from Nature PPSN VI.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2000; Volume 1917, pp. 849–858. [Google Scholar]
- Wang, W.; Wang, W.; Dong, W.; Yu, H.; Yan, Z.; Du, Z. Dimensional optimization of a minimally invasive surgical robot system based on NSGA-II algorithm. Adv. Mech. Eng. 2015, 7, 1687814014568541. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sol. No. | lp [mm] | LH [mm] | LV [mm] | l1 [mm] | l2 [mm] | l3 [mm] | l4 [mm] | GCIa |
|---|---|---|---|---|---|---|---|---|
| 1 | 215.25 | 558.86 | 237.03 | 158.57 | 596.12 | 283.74 | 342.68 | 0.192 |
| 2 | 215.51 | 599.99 | 206.68 | 156.04 | 552.89 | 269.82 | 328.02 | 0.188 |
| 3 | 211.56 | 575.65 | 237.92 | 178.22 | 480.05 | 349.99 | 326.12 | 0.175 |
| 4 | 222.53 | 580.55 | 238.12 | 173.55 | 576.46 | 283.69 | 314.10 | 0.180 |
| 5 | 232.36 | 546.54 | 228.56 | 155.83 | 536.28 | 291.79 | 328.11 | 0.157 |
| 6 | 214.9 | 506.28 | 231.16 | 155.45 | 501.26 | 282.31 | 312.53 | 0.156 |
| q1 [mm] | q2 [mm] | q3 [mm] | q4 [mm] | q5 [mm] | q6 [mm] | |
|---|---|---|---|---|---|---|
| min | 38.2 | 179.6 | 197.8 | 6.8 | −60.8 | 80.4 |
| max | 347.5 | 592.1 | 476.6 | 398.8 | 193.2 | 465.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pisla, D.; Birlescu, I.; Crisan, N.; Pusca, A.; Andras, I.; Tucan, P.; Radu, C.; Gherman, B.; Vaida, C. Singularity Analysis and Geometric Optimization of a 6-DOF Parallel Robot for SILS. Machines 2022, 10, 764. https://doi.org/10.3390/machines10090764
Pisla D, Birlescu I, Crisan N, Pusca A, Andras I, Tucan P, Radu C, Gherman B, Vaida C. Singularity Analysis and Geometric Optimization of a 6-DOF Parallel Robot for SILS. Machines. 2022; 10(9):764. https://doi.org/10.3390/machines10090764
Chicago/Turabian StylePisla, Doina, Iosif Birlescu, Nicolae Crisan, Alexandru Pusca, Iulia Andras, Paul Tucan, Corina Radu, Bogdan Gherman, and Calin Vaida. 2022. "Singularity Analysis and Geometric Optimization of a 6-DOF Parallel Robot for SILS" Machines 10, no. 9: 764. https://doi.org/10.3390/machines10090764
APA StylePisla, D., Birlescu, I., Crisan, N., Pusca, A., Andras, I., Tucan, P., Radu, C., Gherman, B., & Vaida, C. (2022). Singularity Analysis and Geometric Optimization of a 6-DOF Parallel Robot for SILS. Machines, 10(9), 764. https://doi.org/10.3390/machines10090764