
Obstacle Modeling and Structural Optimization of Four-Track Twin-Rocker Rescue Robot

 ,
,  ,
, 
Abstract
1. Introduction
- (1)
- Through the research and design of the bionic leg-type rocker arm structure, the robot can surmount obstacles upward and downward;
- (2)
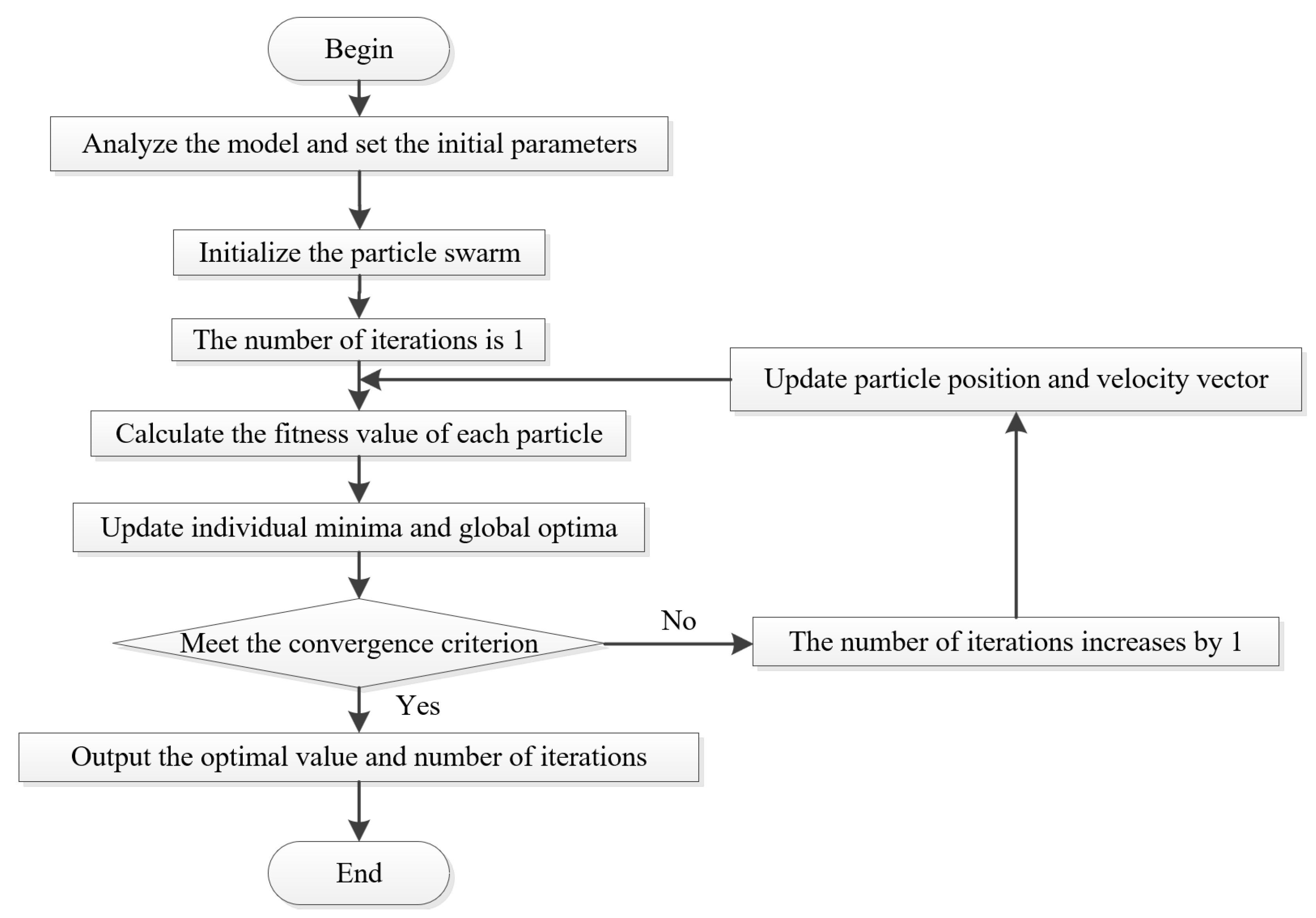
- The bionic particle swarm optimization algorithm is used to optimize the structural parameters of the robot, and the optimal length of the rocker arm is obtained to achieve the maximum obstacle crossing capability of the robot.
2. Structure Design of Four-Track Twin-Rocker Arm Robot
3. Obstacle Crossing Analysis of a Four-Track Twin-Rocker Rescue Robot
- 1.
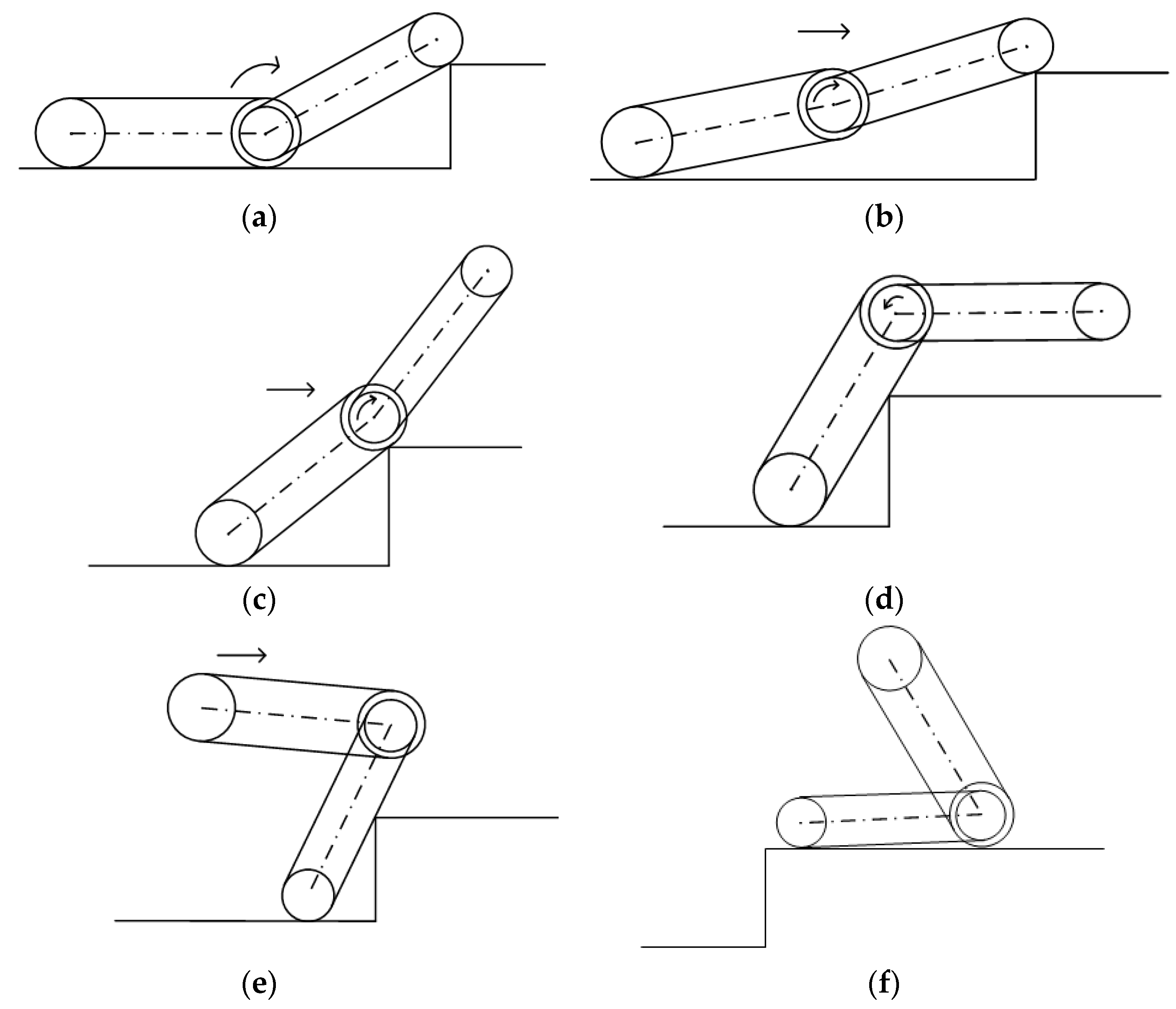
- The robot’s forward obstacle surmounting process is shown in Figure 3. The robot is driven by its power to move forward, and the rocker arm rises at a certain distance from the step so that its track wheel can hit and be supported by the rectangular corner of the step, as shown in Figure 3a. Then, the rocker arms rotate clockwise to make the robot body tilt up to a certain angle, as shown in Figure 3b. Under the action of the driving force, the robot moves forward until its mass center crosses the boundary of the step, as shown in Figure 3c. Finally, the robot will be pulled up the step with the force of gravity in the first half of the robot body, as shown in Figure 3d.
- 2.
- The reverse obstacle surmounting process of the robot is shown in Figure 4. The first four steps are identical to the forward obstacle surmounting process in Figure 3a–c. When the driving wheel fails to cross the step boundary only by rotating the double rocker arm clockwise to support the front part of the car body, the rocker arm is rotated backward until it hits and is supported by the ground, causing the center of mass to rise and move forward, as shown in Figure 4e. When the robot is lifted to a certain height, it climbs the step under the joint action of the driving force, friction and support force of the track on the ground, as shown in Figure 4f.
3.1. Centroid Distribution of Four-Track Twin-Rocker Rescue Robot
3.2. Forward Obstacle Crossing Analysis of Four-Track Twin-Rocker Rescue Robot
- When the step height is low (1–2 cm), the force of the robot crossing the step can be obtained by using the static equilibrium equation, as shown in Figure 6.

- 2.
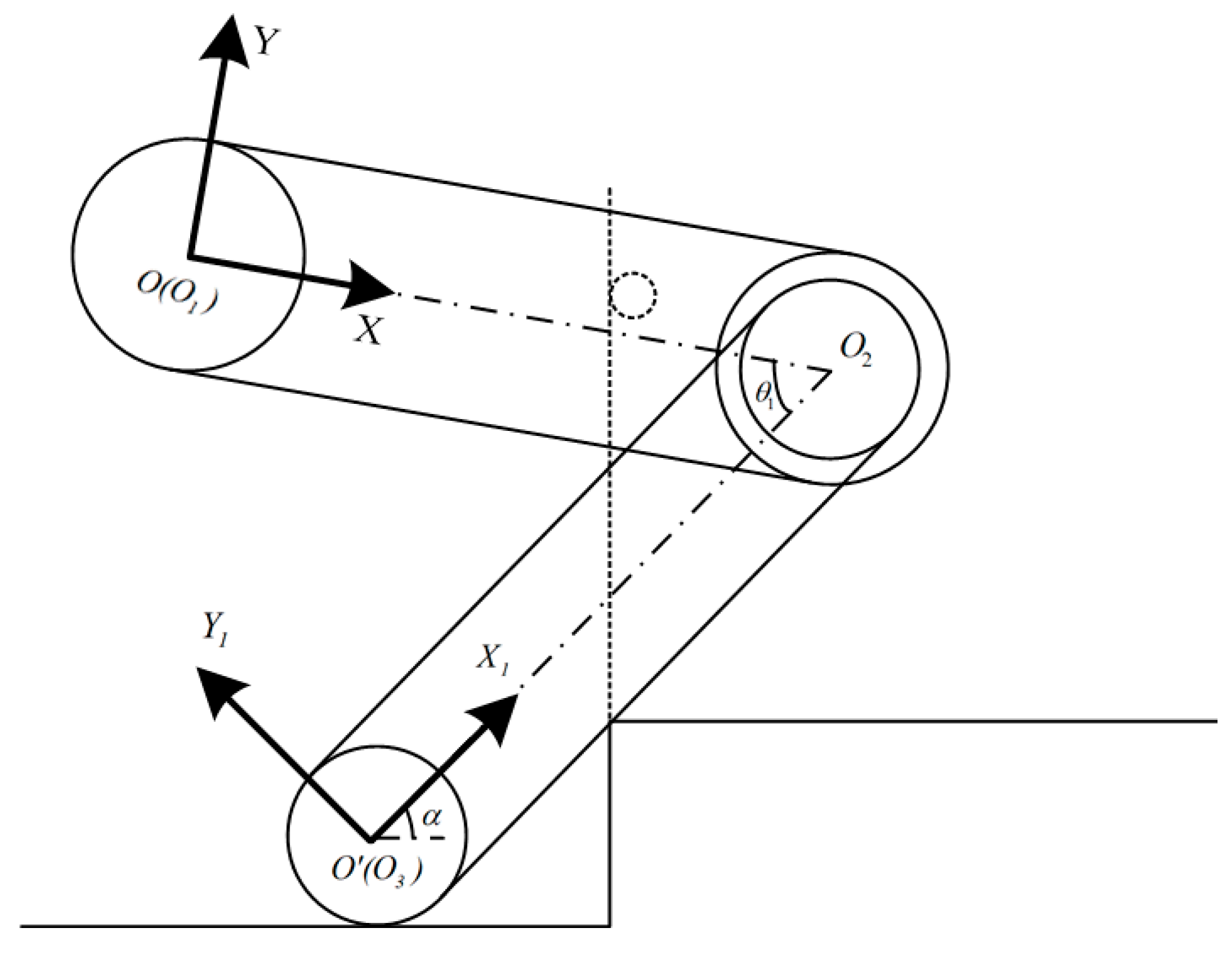
- When the rescue robot crosses the step at a certain height while climbing, the vertical edge line of the step is defined as the key boundary line, as shown in Figure 7. When the centroid of the robot hits the vertical edge line of the step, the rocker arm is kept horizontal. The maximum height of the robot crossing steps forward can be calculated:where is the abscissa of the robot’s center of mass, is the ordinate of the robot’s center of mass and is the angle between the car body and the ground.
3.3. Reverse Obstacle Crossing Analysis of Four-Track Twin-Rocker Rescue Robot
4. Simulation and Experiment
4.1. Simulation Value of Obstacle Crossing Performance
- The rescue robot crosses the barrier.
- 2.
- The rescue robot surmounts the obstacle in reverse.
4.2. Obstacle Crossing Performance Test
4.3. Optimization Design of Structural Parameters
5. Discussion
6. Conclusions
- By comparing the theoretical calculation with the experiment, it can be seen that the experimental measurement was larger. The measured maximum forward and reverse crossing heights were 93 mm and 156.1 mm, respectively.
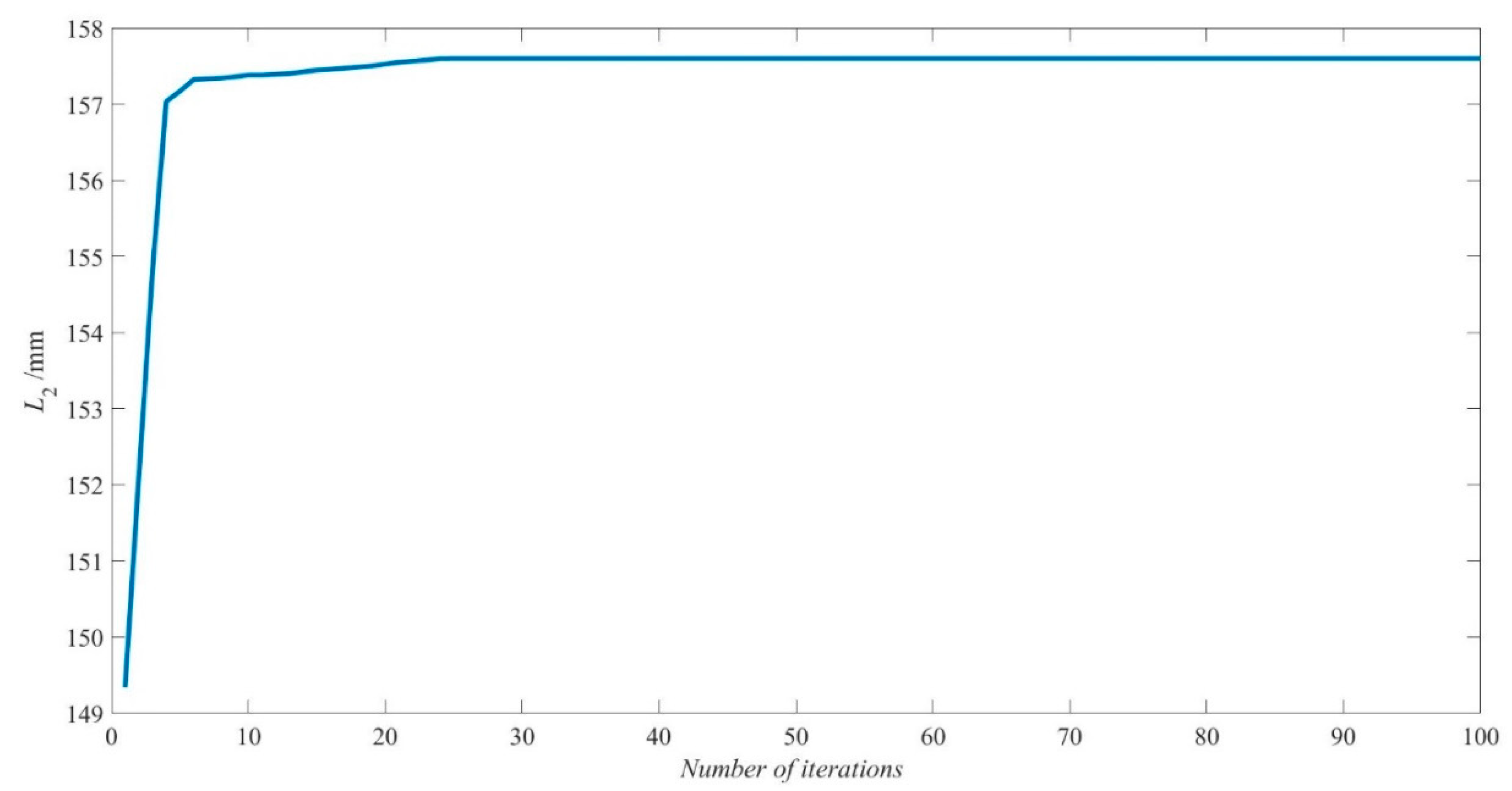
- Combined with the simulation and experiment, it was found that the length of the rocker arm is critical to the obstacle surmounting process. The particle swarm optimization algorithm was used to optimize the structural parameters of the robot, and the optimal arm length of the robot to achieve the maximum obstacle surmounting ability was found to be 315.18 mm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Premachandra, C.; Otsuka, M.; Gohara, R.; Ninomiya, T.; Kato, K. A study on development of a hybrid aerial terrestrial robot system for avoiding ground obstacles by flight. IEEE/CAA J. Autom. Sin. 2018, 6, 327–336. [Google Scholar] [CrossRef]
- Zhang, D.; Guo, C.; Ren, H.; Zhu, P.; Xu, M.; Lu, H. The Design of an Aerial/Ground Dual-Modal Mobile Robot for Exploring Complex Environments. In Proceedings of the 2021 IEEE International Conference on Real-Time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; IEEE: Piscataway, NJ, USA; pp. 393–398. [Google Scholar]
- Takemori, T.; Miyake, M.; Hirai, T.; Wang, X.; Fukao, Y.; Adachi, M.; Yamaguchi, K.; Tanishige, S.; Nomura, Y.; Matsuno, F.; et al. Development of the multifunctional rescue robot FUHGA2 and evaluation at the world robot summit 2018. Adv. Robot. 2019, 34, 119–131. [Google Scholar] [CrossRef]
- Cho, C.; Lee, W.; Kang, S.; Kim, M.; Song, J.-B. Uneven terrain negotiable mobile platform with passively adaptive double tracks and its application to rescue missions. Adv. Robot. 2005, 19, 459–475. [Google Scholar] [CrossRef][Green Version]
- Kim, J.; Lee, C.; Kim, G. Study of machine design for a transformable shape single-tracked vehicle system. Mech. Mach. Theory 2010, 45, 1082–1095. [Google Scholar] [CrossRef]
- Li, Y.W.; Ge, S.R.; Zhu, H.; Fang, H.F. Mobile Platform of a Rocker-Type W-Shaped Track Robot. Key Eng. Mater. 2010, 419–420, 609–612. [Google Scholar] [CrossRef]
- Liu, S.; Guo, Y.; Jia, H.; Lin, S.; Zhao, D. Mechanism principle and obstacle-crossing analysis of robot with automatic-strained track and variable main arm configuration. J. Cent. South Univ. 2013, 44, 2289–2297. [Google Scholar]
- Xue, T.; Liu, R.; Zhai, S.M. Structure Design and Analysis of Moving Character for Detect Robot for Underground Coal Mine. Appl. Mech. Mater. 2014, 526, 205–210. [Google Scholar] [CrossRef]
- Han, X.; Lin, M.; Wu, X.; Yang, J. Design of an Articulated-Tracked Mobile Robot with Two Swing Arms. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019; IEEE: Piscataway, NJ, USA; pp. 684–689. [Google Scholar]
- Li, C.S.; Cui, G.Q.; Pang, S.H. Dynamic Modeling and Analysis of a Mobile Robot for Multi-Movement States. J. Hebei Univ. Technol. 2009, 38, 31–35. [Google Scholar]
- Fang, H.F.; Ge, S.R.; Li, Y.W. Obstacle Performance Analysis of Four-Track Robot with Compliant Swing Arms. J. China Univ. Min. Technol. 2010, 39, 682–686. [Google Scholar]
- Xie, S.; Bao, S.; Zou, B.; Pu, H.; Luo, J.; Gu, J. The research on obstacle-surmounting capability of six-track robot with four swing arms. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2441–2445. [Google Scholar] [CrossRef]
- Li, Y.; Ge, S.; Hua, Z.; Zhu, H.; Liu, J. Obstacle-Surmounting Mechanism and Capability of Four-Track Robot with Two Swing Arms. Robot 2010, 32, 157–165. [Google Scholar] [CrossRef]
- Ye, C.; Li, J.; Yu, S.; Ding, G. Movement Analysis of Rotating-Finger Cable Inspection Robot. Int. Conf. Intell. Robot. Appl. 2019, 11744, 326–337. [Google Scholar] [CrossRef]
- Cui, D.; Gao, X.; Guo, W.; Li, J. Multimode obstacle-crossing analysis of a wheel/track mobile robot. In Proceedings of the 2017 IEEE International Conference on Unmanned Systems (ICUS), Beijing, China, 17–29 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 197–203. [Google Scholar] [CrossRef]
- Ma, J.M.; Li, X.F.; Yao, C.; Wang, Z. Dynamic Modeling and Analysis for Obstacle Negotiation of Ground Mobile Robot. Robot 2008, 30, 273–278. [Google Scholar]
- Wang, W.; Du, Z.; Sun, L. Dynamic Load Effect on Tracked Robot Obstacle Performance. In Proceedings of the 2007 IEEE International Conference on Mechatronics, Kumamoto, Japan, 8–10 May 2007; IEEE: Piscataway, NJ, USA, 2007; pp. 370–375. [Google Scholar] [CrossRef]
- Yamada, Y.; Miyagawa, Y.; Yokoto, R.; Endo, G. Development of a Blade-Type Crawler Mechanism for a Fast Deployment Task to Observe Eruptions on Mt. Mihara. J. Field Robot. 2015, 33, 371–390. [Google Scholar] [CrossRef]
- Ye, C.Q.; Shang, W.Y.; Xu, Z.P.; Liu, J.J.; Huang, Q.R.; An, B. Structural Design of Robot Applied in Post-Earthquake Relief. Appl. Mech. Mater. 2013, 437, 619–622. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicators | Parameter |
|---|---|
| Size/mm × mm × mm | 378 × 300 × 136.5 |
| Diameter of track wheel/mm | 173 |
| Cross-country wheel diameter/mm | 143.5 |
| Rocker arm mass/kg | 0.189 |
| Car body quality/kg | 12.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Wang, W.; Su, G.; Liu, C.; Cai, W.; Zhang, H.; Ran, Y.; Tan, Z.; Luo, M. Obstacle Modeling and Structural Optimization of Four-Track Twin-Rocker Rescue Robot. Machines 2022, 10, 365. https://doi.org/10.3390/machines10050365
Xu X, Wang W, Su G, Liu C, Cai W, Zhang H, Ran Y, Tan Z, Luo M. Obstacle Modeling and Structural Optimization of Four-Track Twin-Rocker Rescue Robot. Machines. 2022; 10(5):365. https://doi.org/10.3390/machines10050365
Chicago/Turabian StyleXu, Xiaobin, Wen Wang, Guangyu Su, Cong Liu, Wei Cai, Haojie Zhang, Yingying Ran, Zhiying Tan, and Minzhou Luo. 2022. "Obstacle Modeling and Structural Optimization of Four-Track Twin-Rocker Rescue Robot" Machines 10, no. 5: 365. https://doi.org/10.3390/machines10050365
APA StyleXu, X., Wang, W., Su, G., Liu, C., Cai, W., Zhang, H., Ran, Y., Tan, Z., & Luo, M. (2022). Obstacle Modeling and Structural Optimization of Four-Track Twin-Rocker Rescue Robot. Machines, 10(5), 365. https://doi.org/10.3390/machines10050365