
Acoustic Signal Classification Using Symmetrized Dot Pattern and Convolutional Neural Network


Abstract
:1. Introduction
2. Materials and Methods
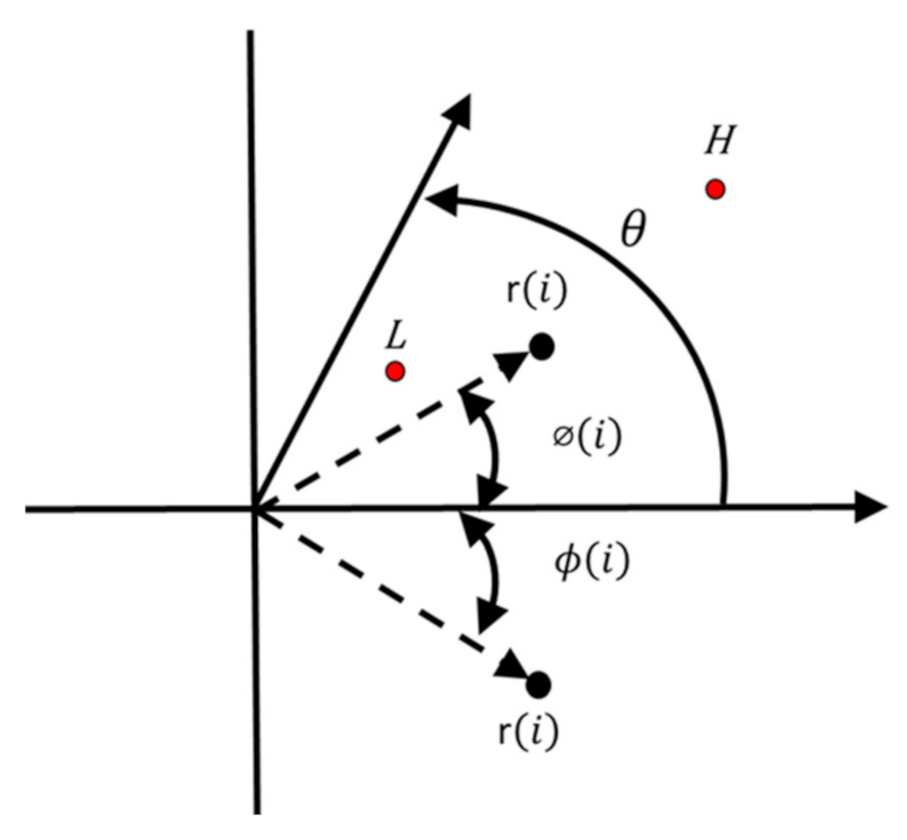
2.1. Symmetrized Dot Pattern Principle
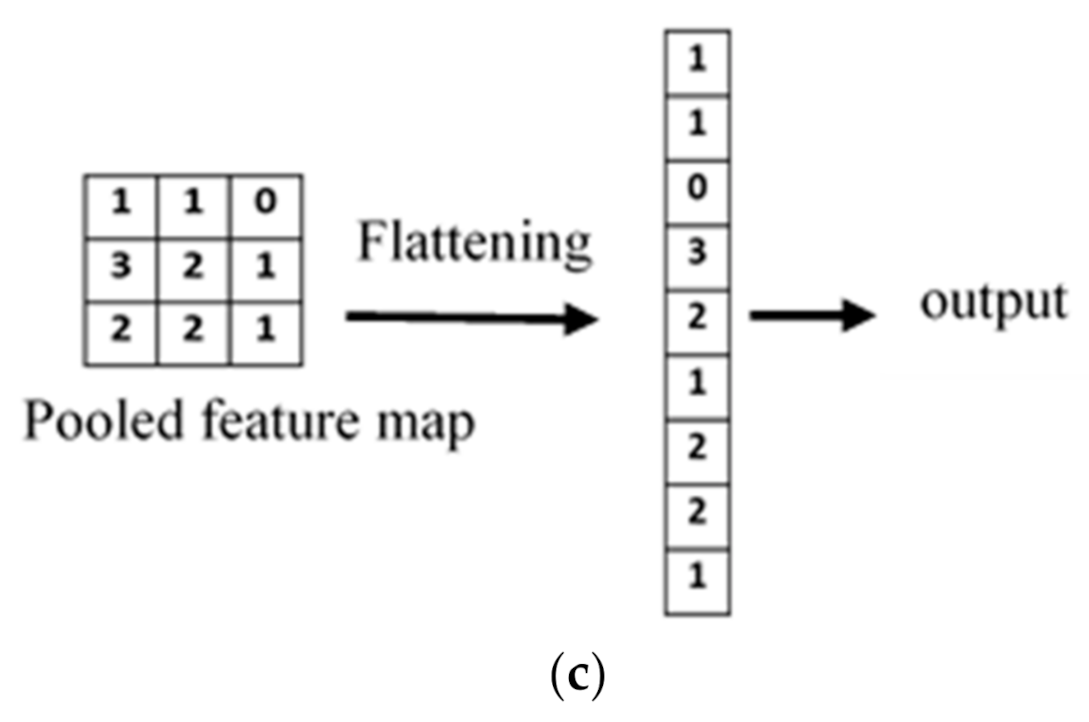
2.2. Principle of Convolutional Neural Network
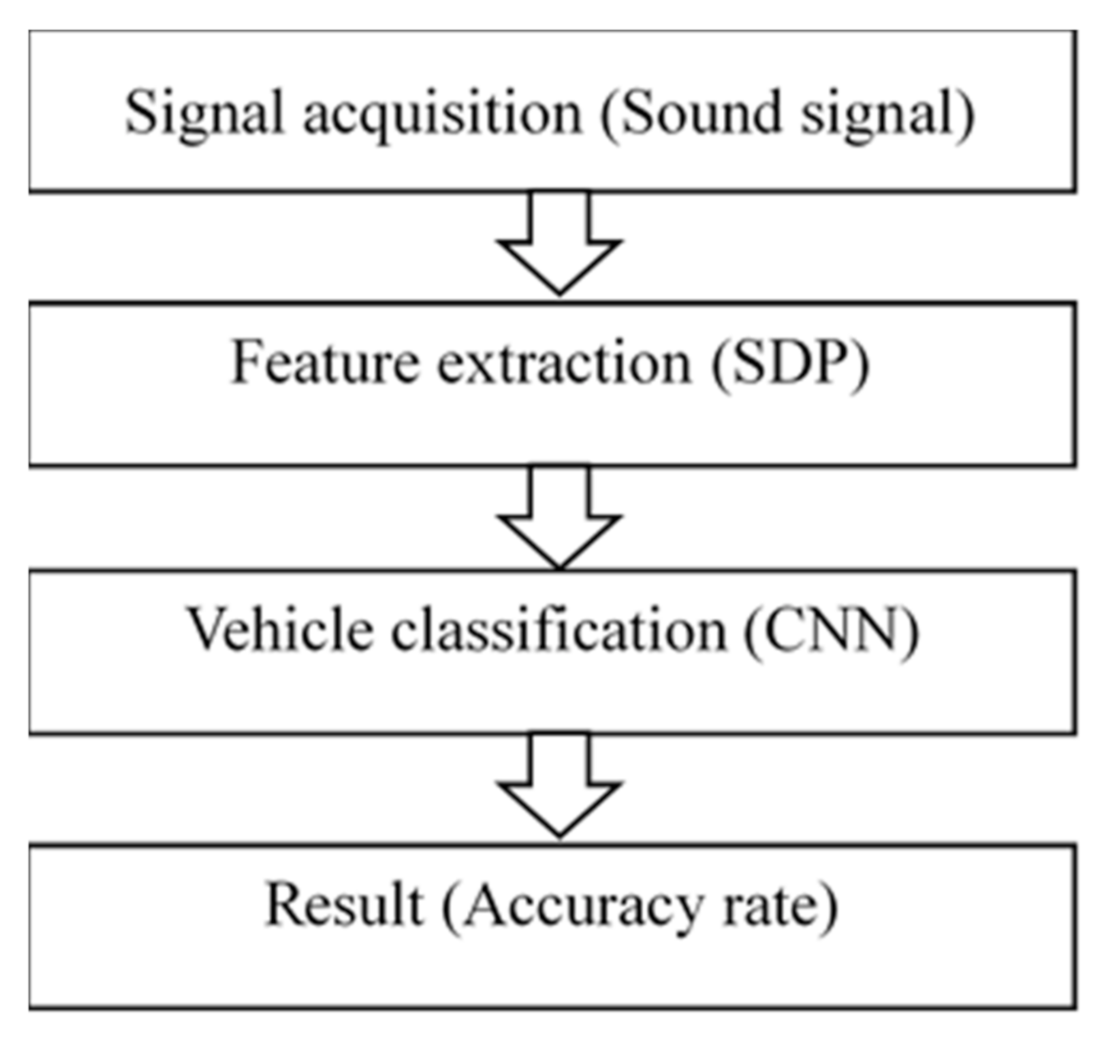
3. Implementation and Experimental Works of Vehicle Classification
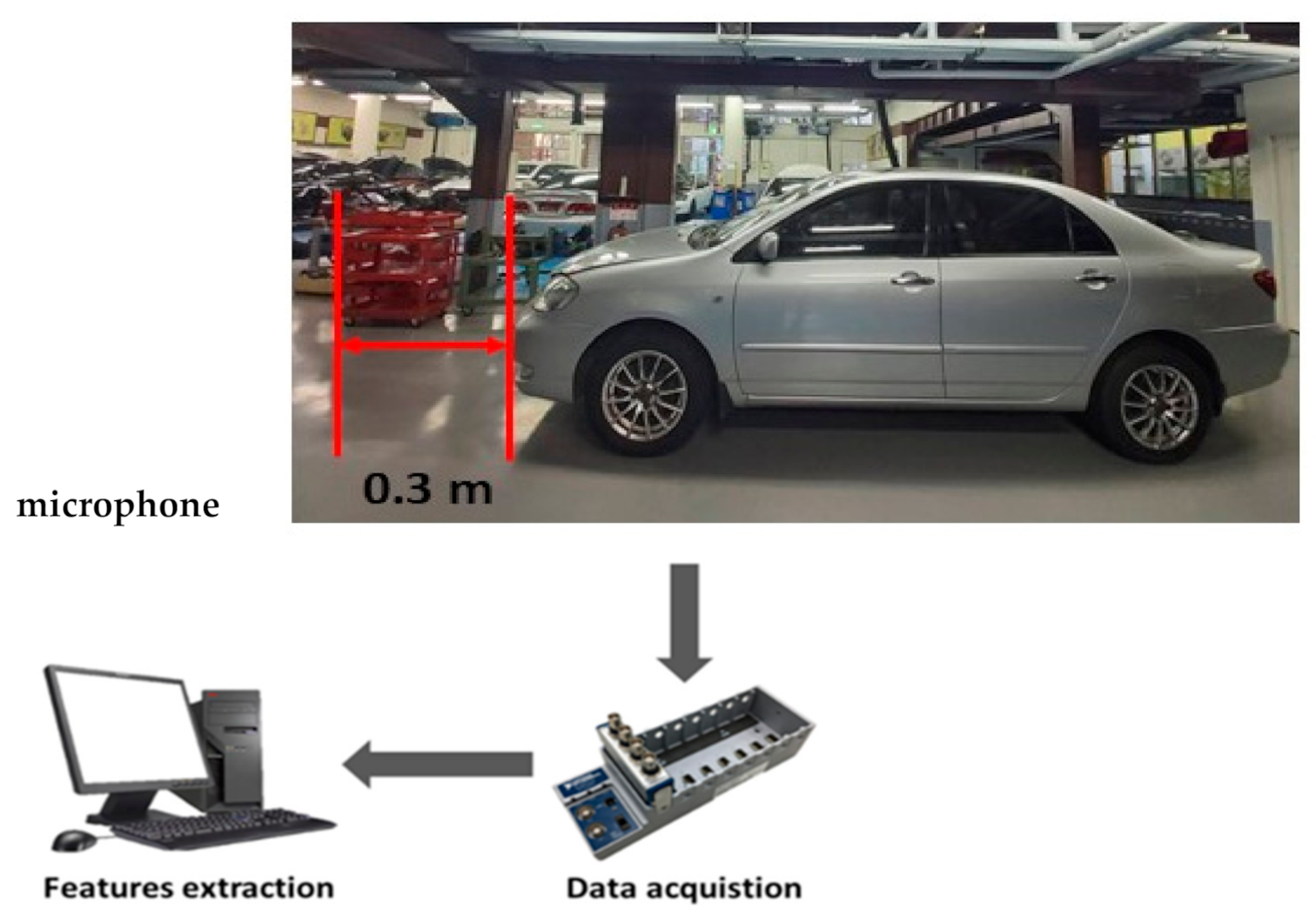
3.1. Experimental Work and Data Measurement
3.2. Acoustic Signal Processing Using Symmetrized Dot Pattern
- The vehicle noise obtained from the data acquisition system has a total of 25,000 points for each data. The time domain vehicle noise signals are converted into a symmetrical point diagram. The data are presented as an SDP, with a symmetrical point plot drawn for each proportion. Each point in the data will be calculated according to Equations (2) and (3), projected into polar coordinate diagrams, and symmetrical point diagrams of each proportional gain coefficient will be drawn. The sound change symmetrical point diagram changes according to the gain coefficient proportion. When the time delay coefficient increases, the overlapping points in the pictures spread out and the lines become obvious when the weighting coefficient is added as a change condition. Different proportions will have different characteristics. After converting the signal into a picture, the picture will be output in 128 × 128 size.
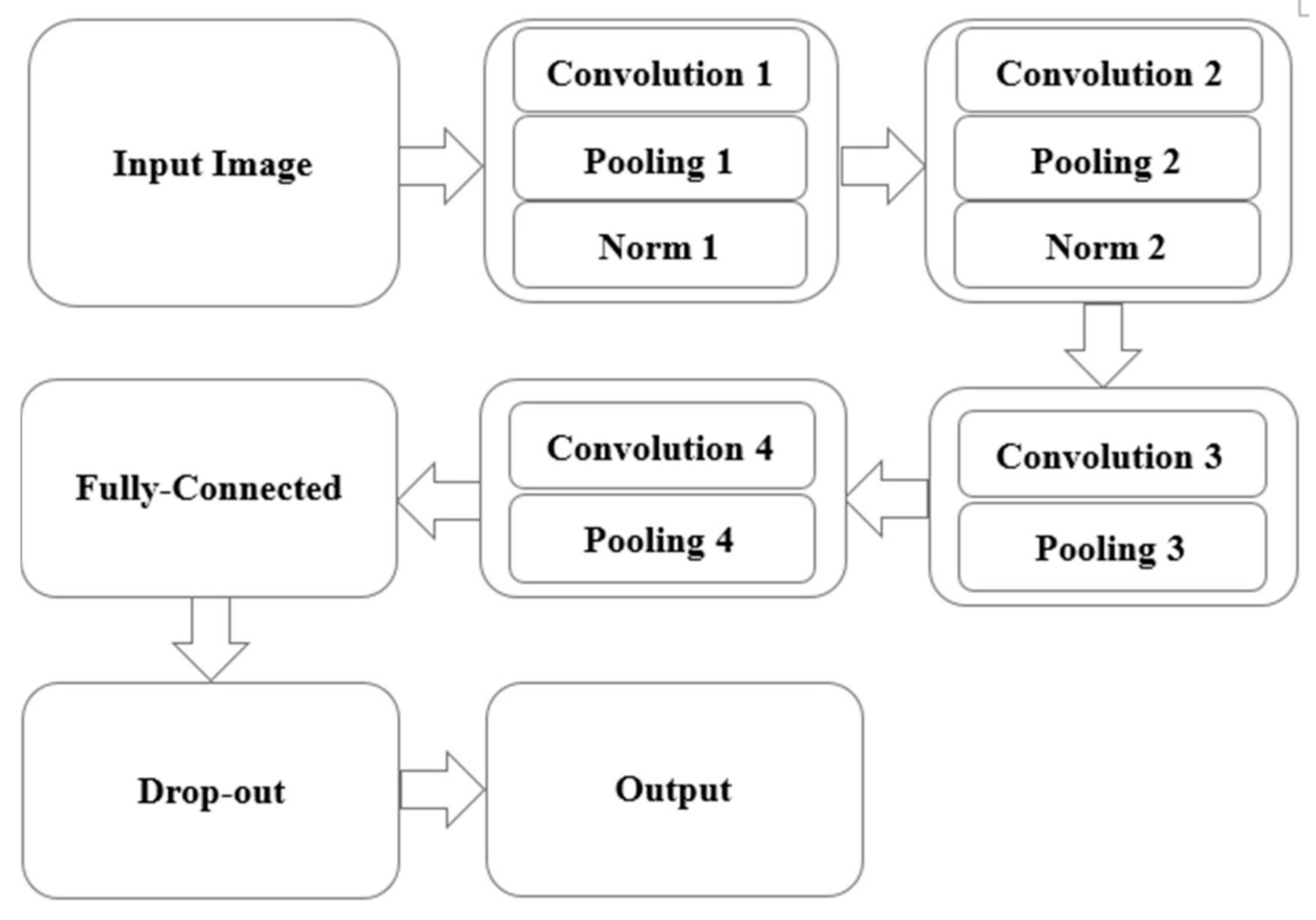
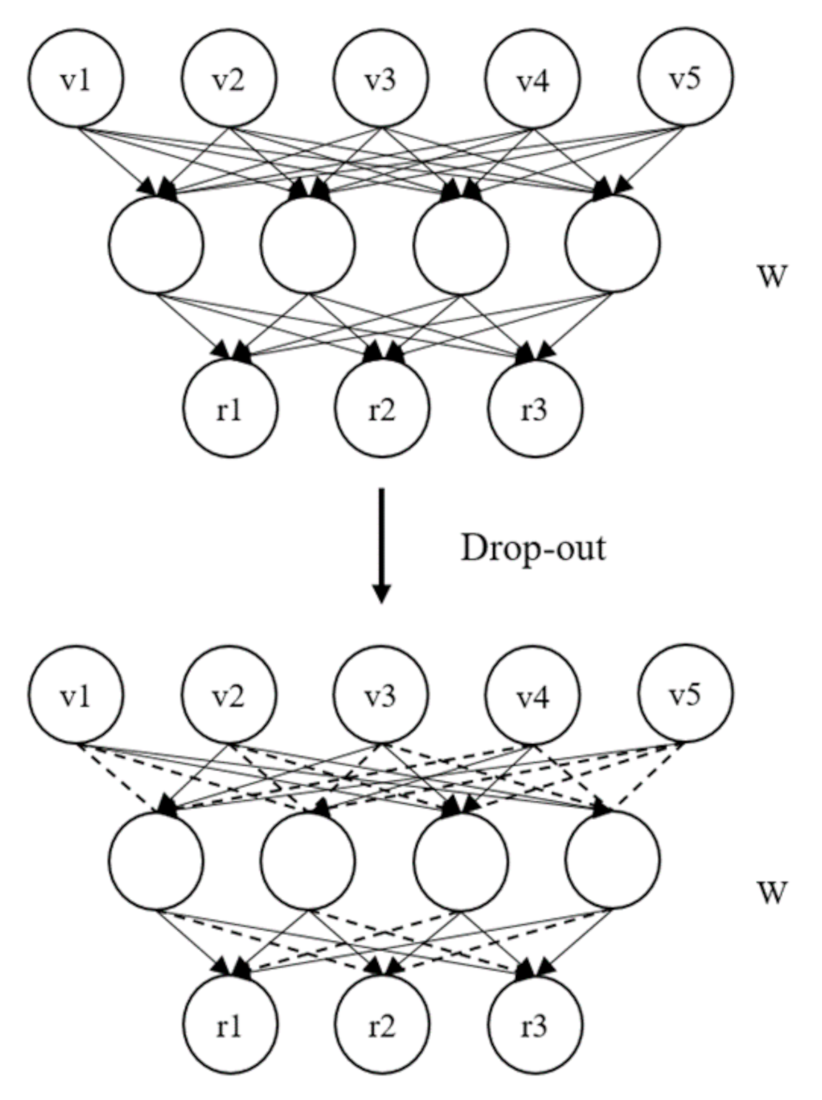
- The Python tensor flow environment was developed by Google and used in this research. Because it supports the programming language C, it is a deep learning environment with a high degree of attention. It is not limited to the deep learning multiple uses and it has reinforced learning and other algorithms. Its ability to run across platforms is strong and can be used and referenced, but the disadvantage is that it runs slower than other environments. The main convolutional neural network architecture is shown in Figure 6, consisting of seven blocks, with four convolutional layers and four pooling layers, finally leading to a fully connected layer. The drop out layer is added to deal with the overfitting the model problem because it avoids relying too highly on sample data during the training process, resulting in an image error value that will not be taken into account during testing. Adding the drop out layer can produce a better fitting effect. The main issue is that when the model parameters are too many and there are too few samples, it is easy to produce overfitting. As showed in Figure 8, in each training batch, some nodes are randomly ignored, so that the neuron will not depend too much on some local features as shown in Figure 9.
3.3. Experimental Results and Discussion
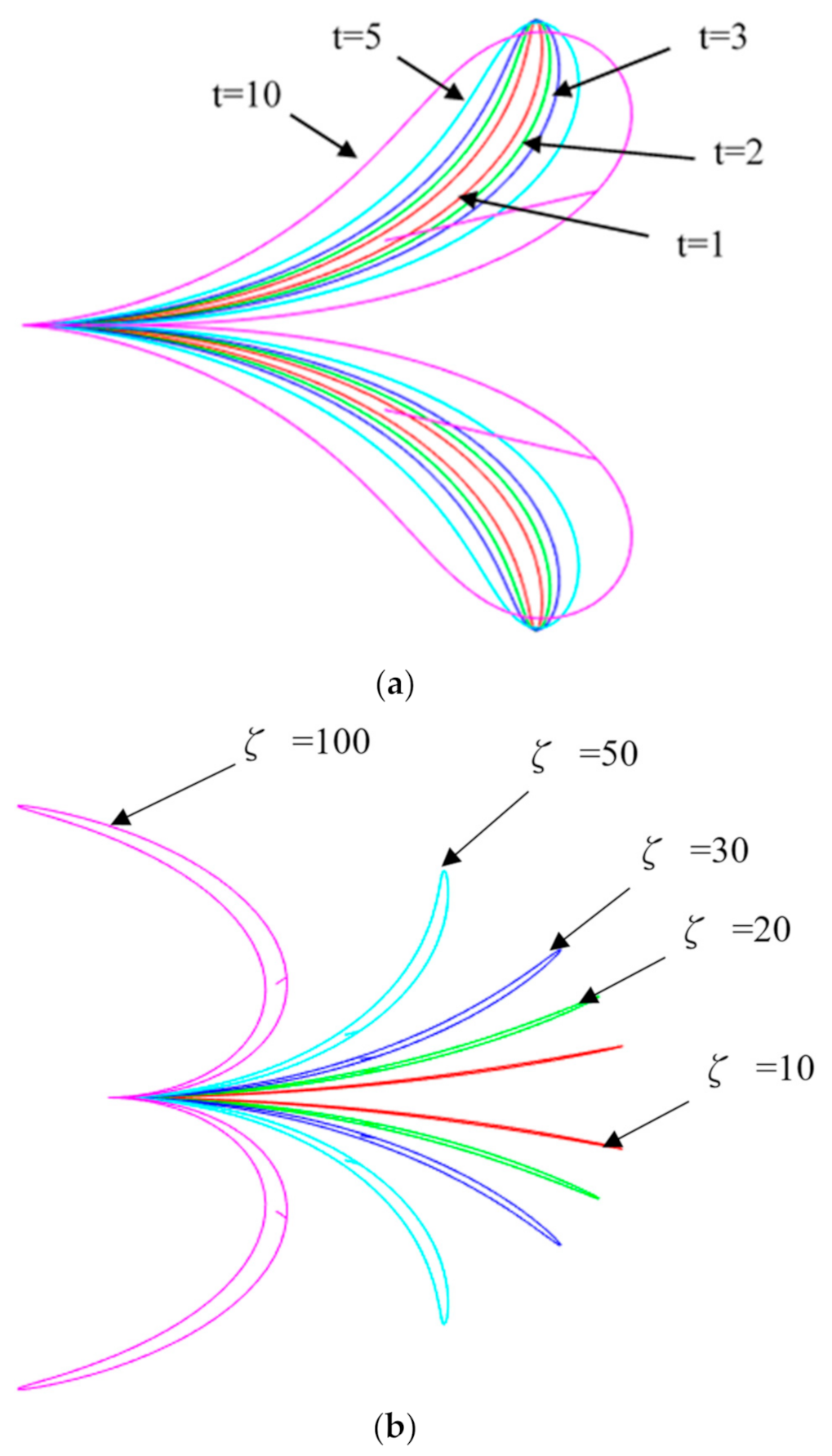
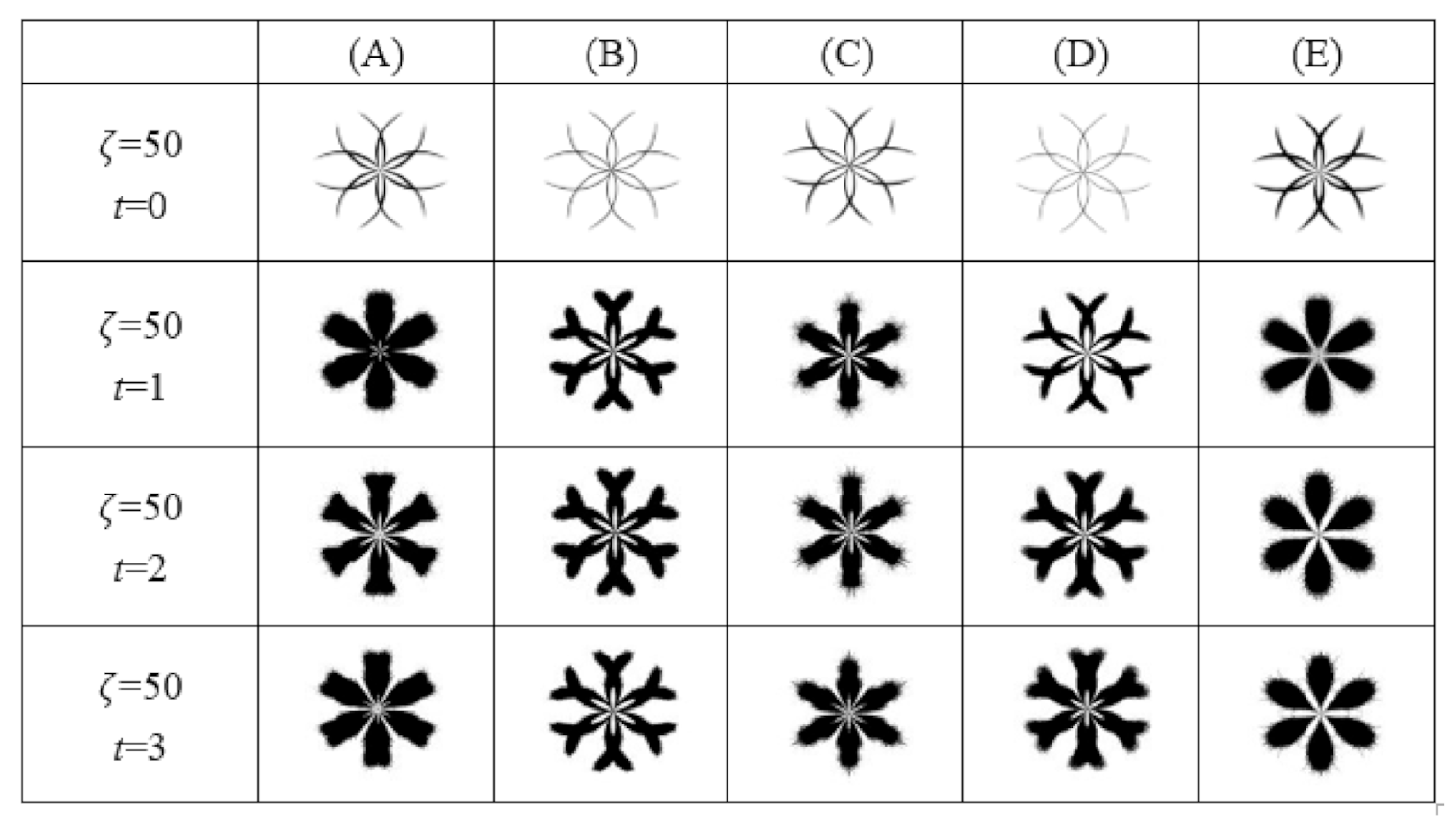
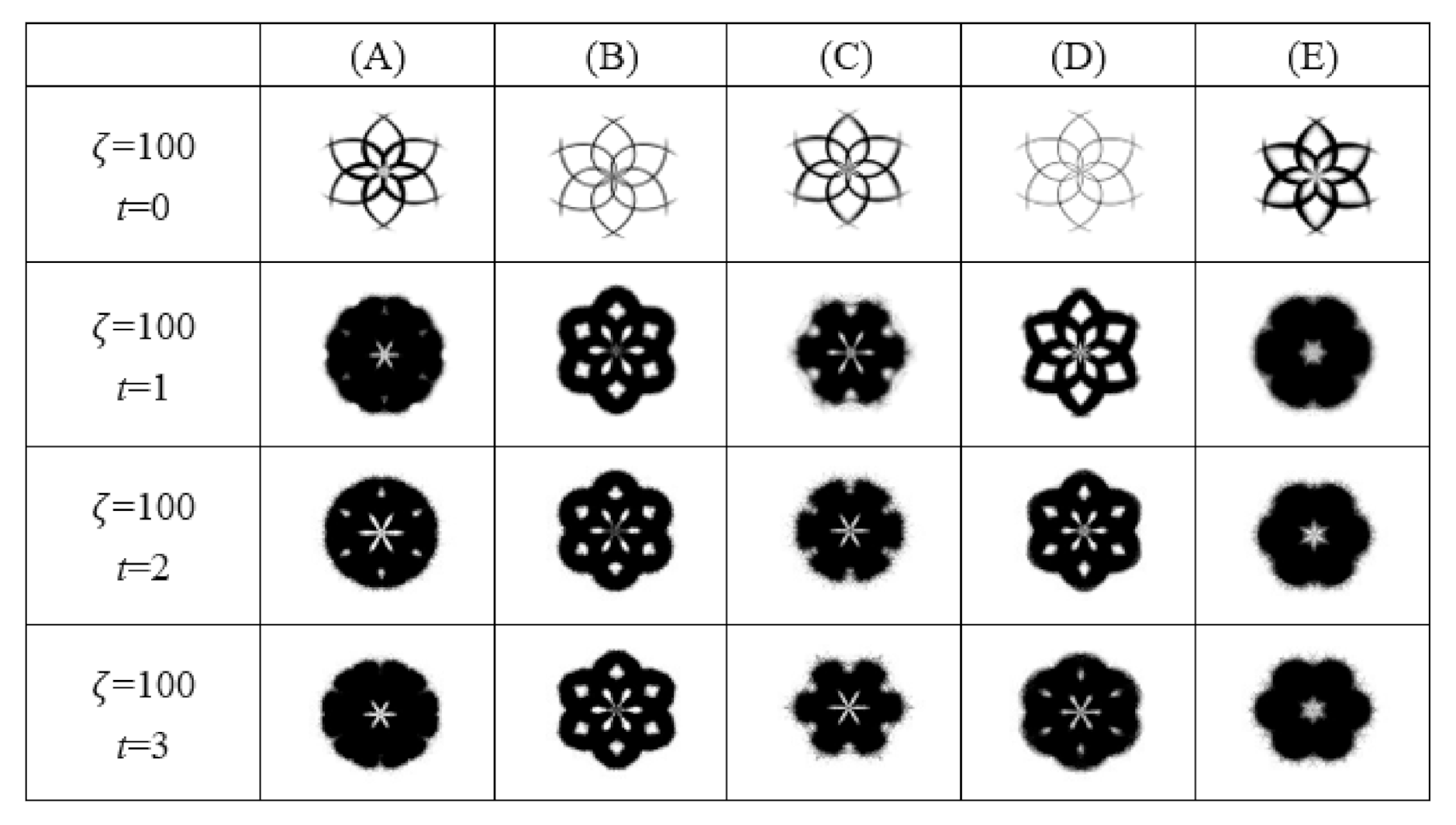
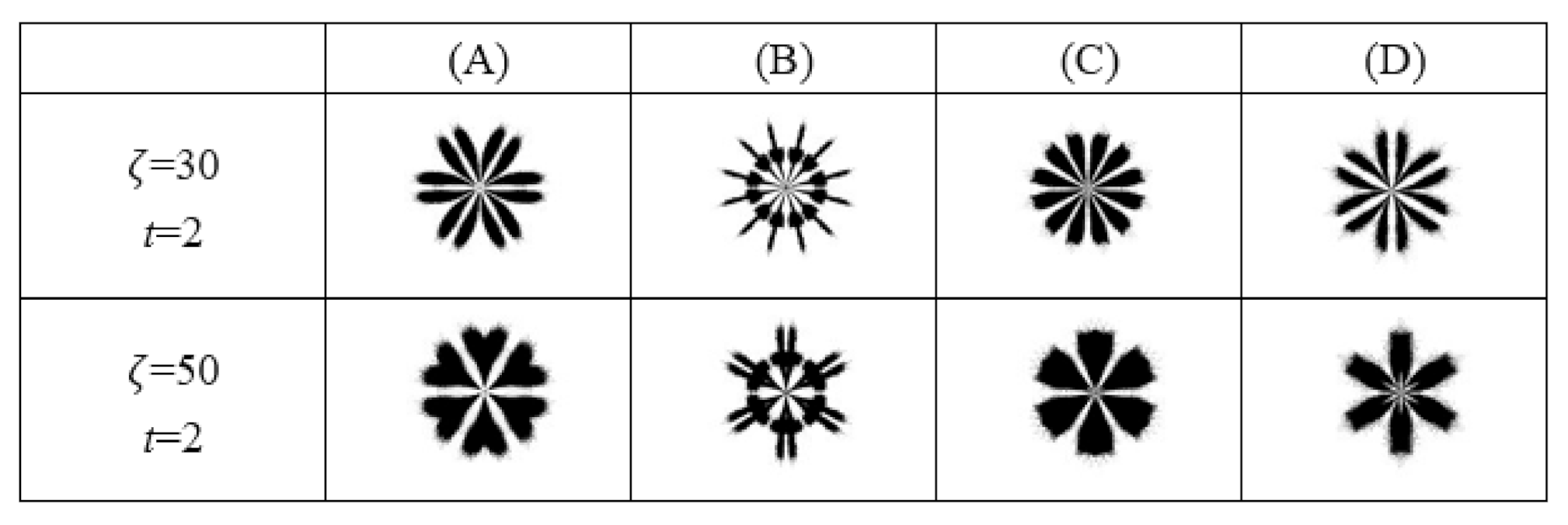
- The time delay coefficient and weighting coefficient influence on the image recognition effect is researched in this study. First of all, this study completed sound symmetry point mapping of the noise from each vehicle, as shown in Figure 10 and Figure 11. It can be observed that when the gain coefficient changes, it has a great impact on the pattern shape. This study will be focused on understanding the gain factor ratio effect in the proposed system. It can be seen that when the time delay coefficient is increased, the pattern characteristics become obvious. In this study, 60° is used as the interval, and a symmetrical point diagram can be seen, showing a six-petal snowflake shape. The shape of the pattern will be affected by the weighting and time delay coefficients.
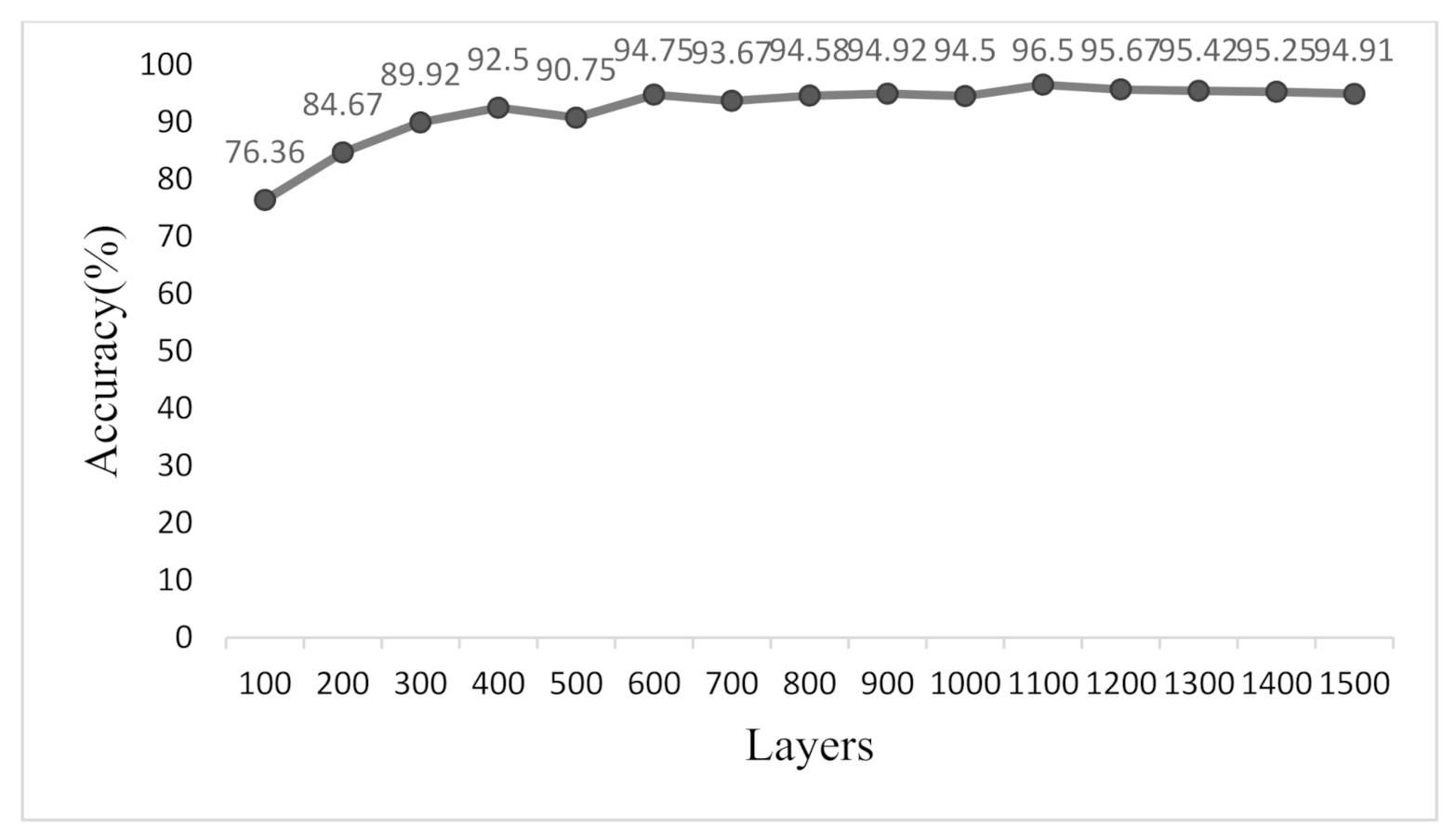
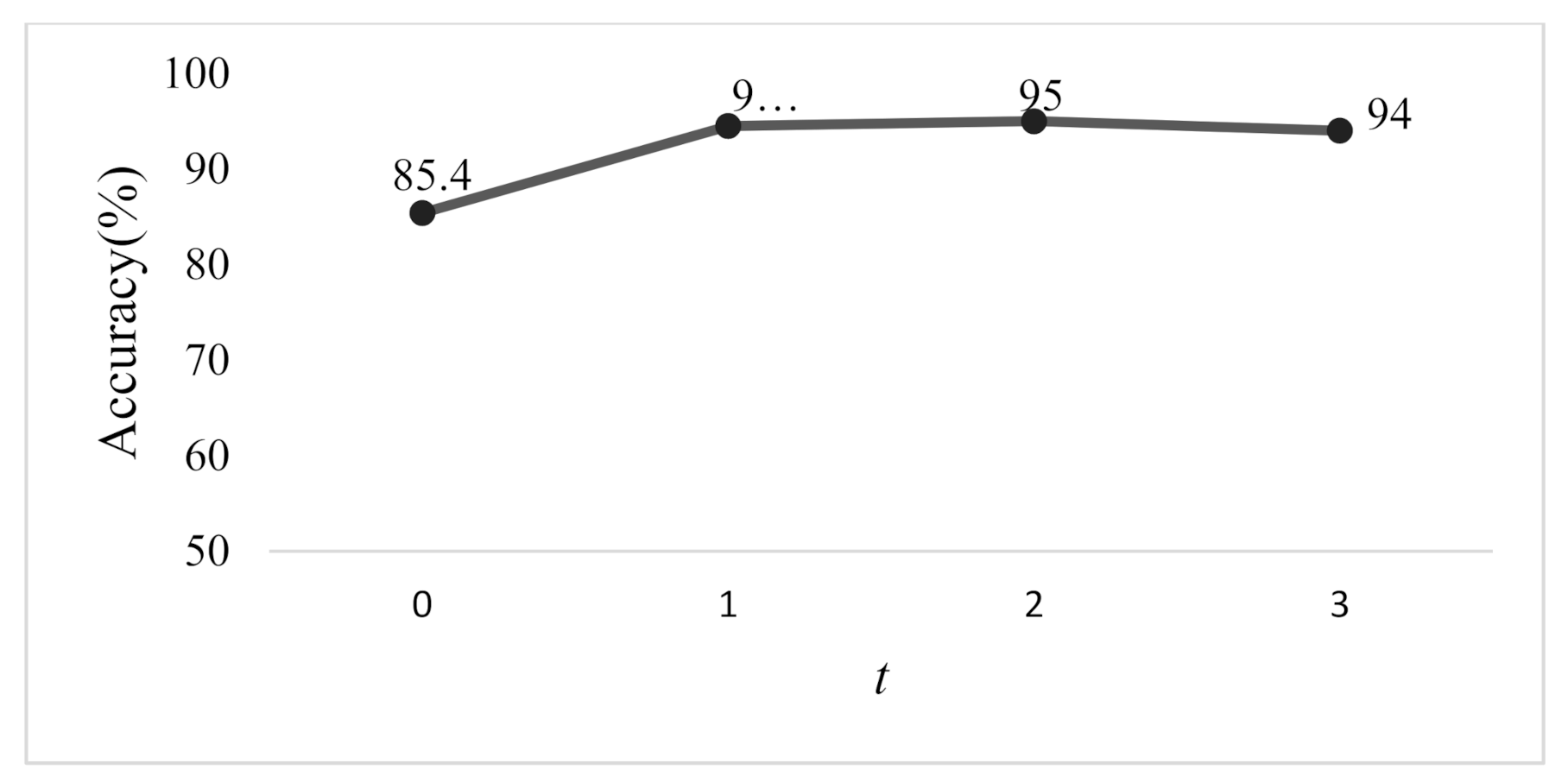
- When using convolutional neural networks for training and identification, it can be found that the weighting coefficients and time delay coefficients in the symmetric point diagram of noise have an important impact on the recognition of using convolutional neural networks. Therefore, this study attempts to perform an exploration of related variables. First, we try to understand the number of iterative layers effect on the convolutional nerves on the recognition rate. In the data analysis and identification process, when the number of iteration layer changes, it has a significant impact on the overall identification rate. In the experiment, the experimental results are presented with the change of the coefficients, which are in three resulting graphs, which are the identification results on the number of convolutional neural iteration layers, time coefficients, and weighting coefficients. The result is shown in Figure 12, demonstrating that the identification rate can be significantly increased when the number of iterative layers is increased. When the number of iterative layers is higher than 600, the average identification rate can reach about 95%. With the increase in the number of iterations, the recognition rate stabilized, and the effect is not obvious. When drawing a point-symmetric graph, the time delay coefficient also significantly affects the results of the graph. We first set t to vary from 0–3, and explore the coefficient time delay effect on the overall recognition rate. From the results in the figures, it can be observed that there are obvious differences between the different models between 1–3. From the results compiled in Figure 13, it can be shown that when the time delay coefficient is between 1–3, the recognition rate is between 94 and 95%, and the difference is not too obvious. Among them, when time delay coefficient is 2, the average recognition rate is better a little.
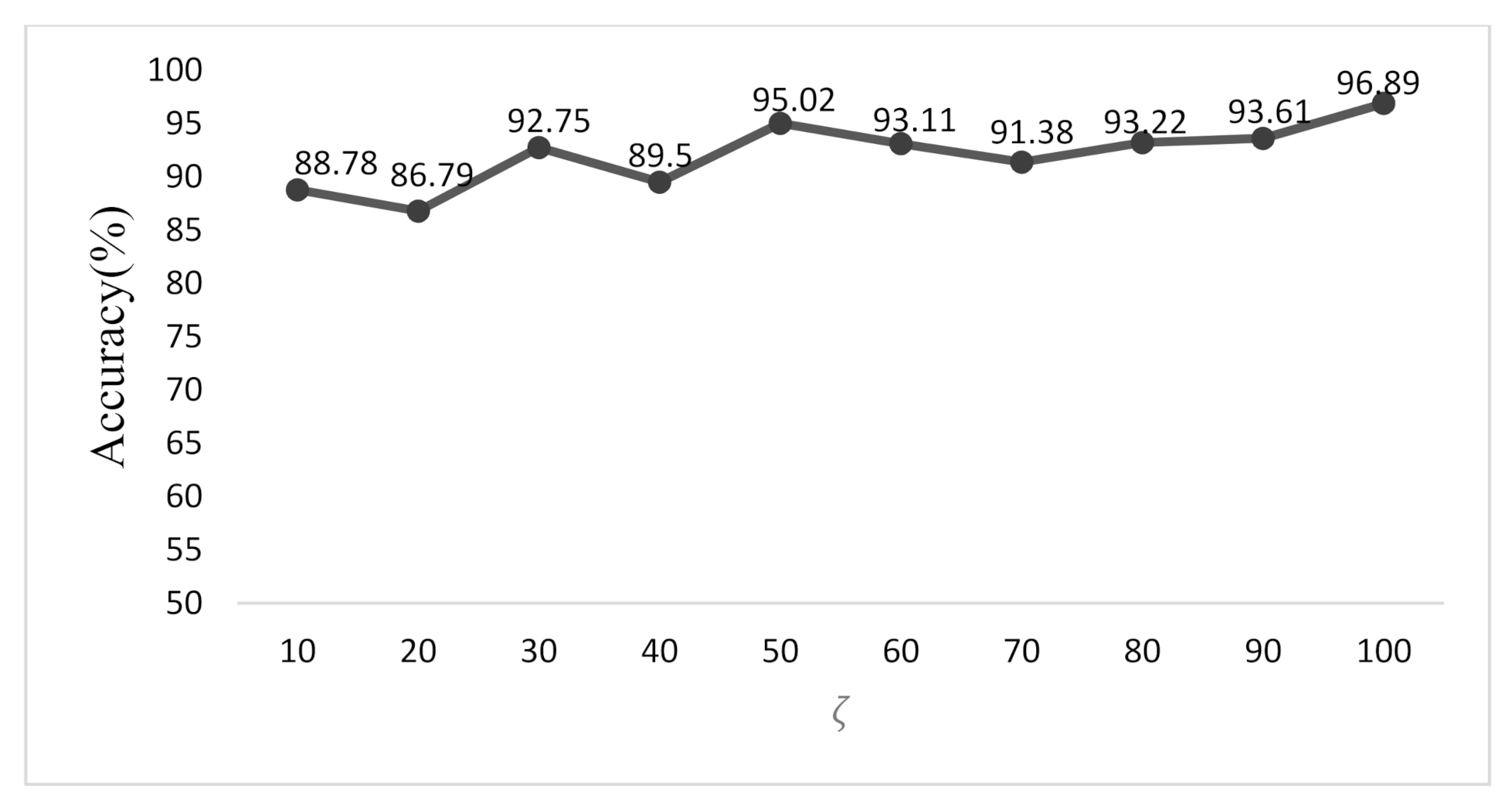
- In addition, we also tried to understand the weighting coefficient ζ influence on the recognition rate. When drawing a point-symmetrical diagram, the weighting coefficient was changed from 10 to 100, and the effect on the average recognition rate was discussed. The results are shown in Figure 14. It shows that when the weighting coefficients ζ are 10, 20, and 40, the average recognition effect is below 90%, and the remaining weighting coefficients can reach more than 90%. Among them, the recognition is the best when the weighting coefficient is 100, and the weighting coefficient ζ is 50. It can reach an average recognition result of more than 95%. This study highlights the possibility of engine signal classification and fault diagnosis when the vehicle is stationary. Although its sound characteristics are somewhat different from the actual driving conditions, the related technology should be applicable to the actual driving conditions. The condition will be applied in other application of electrical vehicle classification.
4. Discussion
4.1. Electrical Vehicle Experimental Work
4.2. Electrical Vehicle Classification Result
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pickover, C.A. On the use of symmetrized dot patterns for the visual characterization of speech waveforms and other sampled data. J. Acoust. Soc. Am. 1986, 80, 955–960. [Google Scholar] [CrossRef] [PubMed]
- Derosier, B.; Normand, M.; Peleg, M. Effect of lag on the symmetrized dot pattern (SDP) displays of the mechanical signatures of crunchy cereal foods. J. Sci. Food Agric. 1997, 75, 173–178. [Google Scholar] [CrossRef]
- Shibata, K.; Takahashi, A.; Shirai, T. Fault diagnosis of rotating machinery through visualization of sound signals. J. Mech. Syst. Signal Process. 2000, 14, 229–241. [Google Scholar] [CrossRef]
- Dudkowska, A.; Makowiec, D. Sleep and wake phase of heart beat dynamics by artificial non symmetrized patterns. Phys. A Stat. Mech. Appl. 2004, 336, 174–180. [Google Scholar] [CrossRef]
- Wu, J.D.; Chuang, C.Q. Fault diagnosis of internal combustion engines using visual dot patterns of acoustic and vibration signals. NDT E Int. 2005, 38, 605–614. [Google Scholar] [CrossRef]
- Yang, C.; Feng, T. Abnormal noise diagnosis of internal combustion engine using wavelet spatial correlation filter and symmetrized dot pattern. Appl. Mech. Mater. 2011, 141, 168–173. [Google Scholar] [CrossRef]
- Tomasz, F.; Štefan, L. Assessment of the vibro activity level of SI engines in stationary and non-stationary operating conditions. J. Vibro Eng. 2014, 16, 1349–1359. [Google Scholar] [CrossRef]
- Wang, J.C. Vehicle Type Identification Using Visual Dot Pattern Technique of Noise Signal. Master’s Thesis, National Changhua University of Education, Changhua, Taiwan, 2015. [Google Scholar]
- Hubel, D.H.; Wiesel, T.N. Receptive fields, binocular interaction and functional architecture in the cat’s visual cortex. J. Physiol. 1962, 160, 106–154. [Google Scholar] [CrossRef]
- Fukushima, K. Neocognitron: A self-organizing neural network model for a mechanism of pattern recognition unaffected by shift in position. Biol. Cybern. 1980, 36, 193–202. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Vedaldi, A.; Lenc, K. Matconvnet: Convolutional neural networks for MATLAB. In Proceedings of the 23rd ACM International Conference on Multimedia, Brisbane, Australia, 26–30 October 2015; pp. 689–692. [Google Scholar] [CrossRef]
- Konovalenko, I.; Maruschak, P.; Prentkovskis, O.; Junevičius, R. Investigation of the rupture surface of the titanium alloy using convolutional neural networks. J. Mater. 2018, 11, 2467. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abiyev, R.H.; Ma’aitah, M. Deep convolutional neural networks for chest diseases detection. J. Healthc. Eng. 2018, 1, 11. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kalfas, I.; Vinken, K.; Vogels, R. Representations of regular and irregular shapes by deep convolutional neural networks, monkey infero temporal neurons and human judgments. J. PLoS Comput. Biol. 2018, 14, 10. [Google Scholar] [CrossRef]
- Jain, K.; Choudhury, T.; Kashyap, N. Smart vehicle identification system using OCR. In Proceedings of the 2017 3rd International Conference on Computational Intelligence and Communication Technology (CICT), Ghaziabad, India, 9–10 February 2017; pp. 3–6. [Google Scholar] [CrossRef]
- Zhang, X.; Jiang, L. Vehicle types recognition based on neural network. Int. Conf. Comput. Intell. Nat. Comput. 2009, 1, 3–6. [Google Scholar] [CrossRef]
- Zeng, R.; Zhang, L.; Xiao, Y.; Mei, J.; Zhou, B.; Zhao, H.; Jia, J. An approach on fault detection in diesel engine by using symmetrical polar coordinates and image recognition. Adv. Mech. Eng. 2014, 6, 273929. [Google Scholar] [CrossRef]
- González, J.; Oro, F.M.J.; Méndez, D.; Argüelles, K.M.; Velarde-Suárez, S.; Rodríguez, D. Symmetrized dot pattern analysis for the unsteady vibration state in a sirocco fan unit. Appl. Acoust. 2019, 152, 1–12. [Google Scholar] [CrossRef]
- Nilwong, S.; Hossain, D.; Kaneko, S.-I.; Capi, G. Deep Learning-Based Landmark Detection for Mobile Robot Outdoor Localization. Machines 2019, 7, 25. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Yang, F.; Zha, W.; Yan, L. Combined Optimization Prediction Model of Regional Wind Power Based on Convolution Neural Network and Similar Days. Machines 2020, 8, 80. [Google Scholar] [CrossRef]
- Pham, M.-T.; Kim, J.-M.; Kim, C.-H. 2D CNN-Based Multi-Output Diagnosis for Compound Bearing Faults under Variable Rotational Speeds. Machines 2021, 9, 199. [Google Scholar] [CrossRef]
- Colantonio, L.; Equeter, L.; Dehombreux, P.; Ducobu, F. A Systematic Literature Review of Cutting Tool Wear Monitoring in Turning by Using Artificial Intelligence Techniques. Machines 2021, 9, 351. [Google Scholar] [CrossRef]
- Fentaye, A.D.; Zaccaria, V.; Kyprianidis, K. Aircraft Engine Performance Monitoring and Diagnostics Based on Deep Convolutional Neural Networks. Machines 2021, 9, 337. [Google Scholar] [CrossRef]
- Gong, L.; Fan, S. A CNN-Based Method for Counting Grains within a Panicle. Machines 2022, 10, 30. [Google Scholar] [CrossRef]
- Georgescu, M.; Ionescu, R.T. Recognizing facial expressions of occluded faces using convolutional neural networks. Int. Conf. Neural Inf. Process. 2019, 1142, 645–653. [Google Scholar] [CrossRef] [Green Version]
- Knauer, U.; Rekowski, C.S.; Stecklina, M.; Krokotsch, T.; Minh, T.P.; Hauffe, V.; Kilias, D.; Ehrhardt, I.; Sagischewski, H.; Chmara, S.; et al. Tree species classification based on hybrid ensembles of a convolutional neural network (CNN) and random forest classifiers. Remote Sens. 2019, 11, 2788. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Brand | Type | Number | Specification | Year |
|---|---|---|---|---|
| Toyota | Camry | A | 2.0 L, I4 | 2004 |
| Toyota | Altis | B | 1.6 L, I4 | 2004 |
| Mitsubishi | Grunder | C | 2.4 L, I4 | 2005 |
| Toyota | Corolla | D | 1.6 L, I4 | 2005 |
| Chrysler | Caravan | E | 2.4 L, I4 | 2004 |
| Number | Types |
|---|---|
| A | Toothed brush motor |
| B | Toothed brushless motor |
| C | Toothless brushless motor |
| D | Electric motorbike in bench test |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.-D.; Luo, W.-J.; Yao, K.-C. Acoustic Signal Classification Using Symmetrized Dot Pattern and Convolutional Neural Network. Machines 2022, 10, 90. https://doi.org/10.3390/machines10020090
Wu J-D, Luo W-J, Yao K-C. Acoustic Signal Classification Using Symmetrized Dot Pattern and Convolutional Neural Network. Machines. 2022; 10(2):90. https://doi.org/10.3390/machines10020090
Chicago/Turabian StyleWu, Jian-Da, Wen-Jun Luo, and Kai-Chao Yao. 2022. "Acoustic Signal Classification Using Symmetrized Dot Pattern and Convolutional Neural Network" Machines 10, no. 2: 90. https://doi.org/10.3390/machines10020090
APA StyleWu, J.-D., Luo, W.-J., & Yao, K.-C. (2022). Acoustic Signal Classification Using Symmetrized Dot Pattern and Convolutional Neural Network. Machines, 10(2), 90. https://doi.org/10.3390/machines10020090