


Teaching Motion Control in Mechatronics Education Using an Open Framework Based on the Elevator Model


Abstract
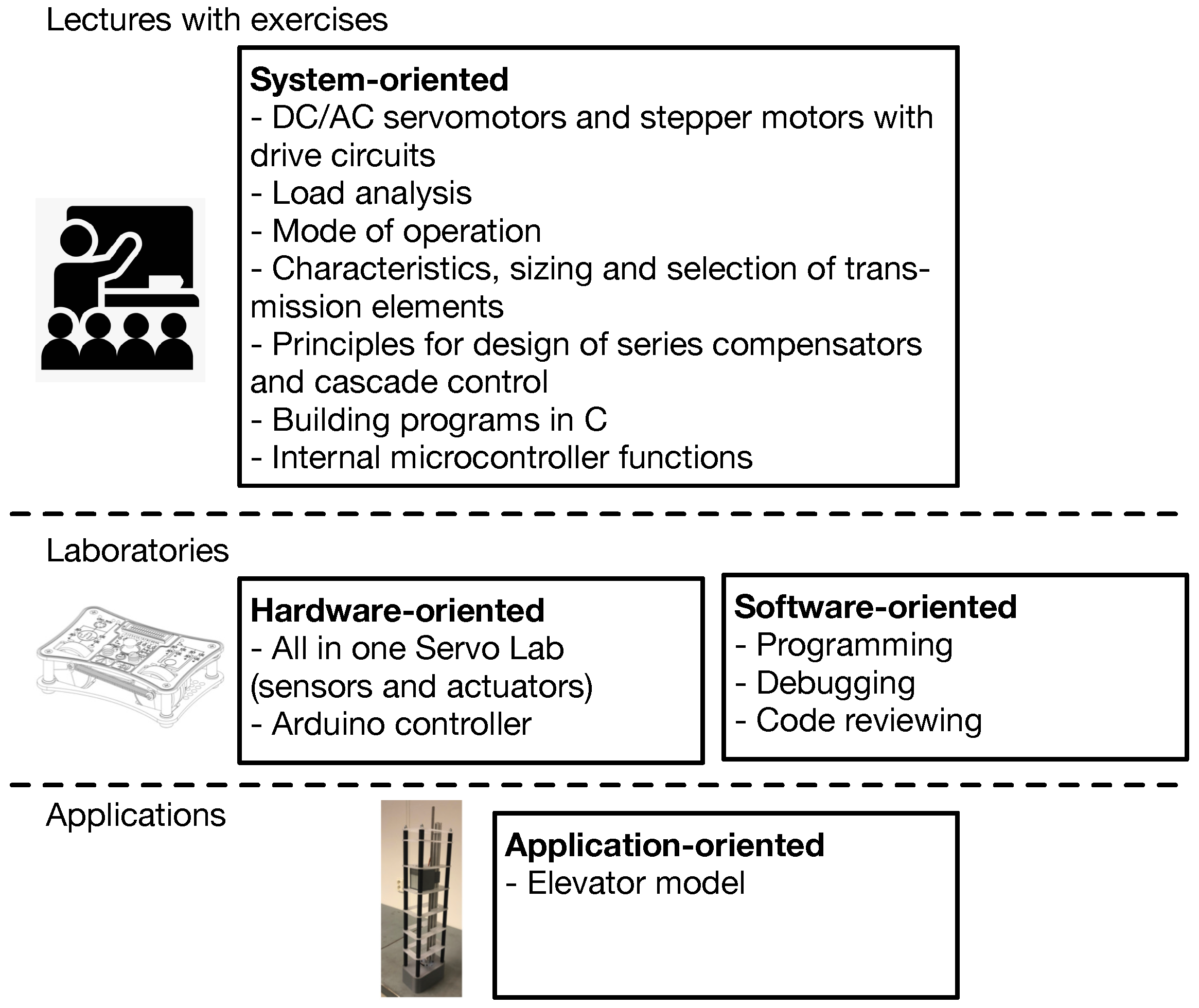
1. Introduction
- Lectures that combine theory and exercises. This component of the module is systems oriented and focuses on system requirements, modelling, methods for analysis and design of motion control systems, and control. Exercises are given and done in scheduled hours with close supervision;
- Laboratory. This component of the course is designed to be both hardware-oriented, by focusing on selecting the necessary sensors and actuators, as well as software-oriented, by focusing on programming, debugging and reviewing. The laboratory is based on a group project;
- Applications. Both the theoretical lectures and the laboratory work are aimed at providing students with an improved hands-on experience with rapid-prototyping of motion control systems.
2. Pedagogical Tools
3. Course Overview
3.1. Lecture 1: Introduction on Direct Current (DC) Machines
3.2. Lecture 2: DC Machine’s Various Drive Circuits and Operations
3.3. Lecture 3: Modelling of a DC Motor as a Thermal System
3.4. Lecture 4: Stepper Motor Types and Working Principles
3.5. Lecture 5: Control Methods for Stepper Motors
3.6. Lecture 6: Brushless DC Electric Motors
3.7. Lecture 7: Permanent-Magnet Synchronous Motors (PMSM)
3.8. Lecture 8: Rotary to Rotary Motion Transmissions
3.9. Lecture 9: Rotary to Translational Motion Transmissions
3.10. Lecture 10: Shaft Selection and Sizing
3.11. Lecture 11: Lead–Lag Compensators
3.12. Lecture 12: Modern Motion Control Architecture
4. Laboratories Overview
4.1. Programming in Practice: Arduino
4.2. Unified Modelling Language (UML) and Class Exercise
4.3. All in One Servo Lab (AIOSL)
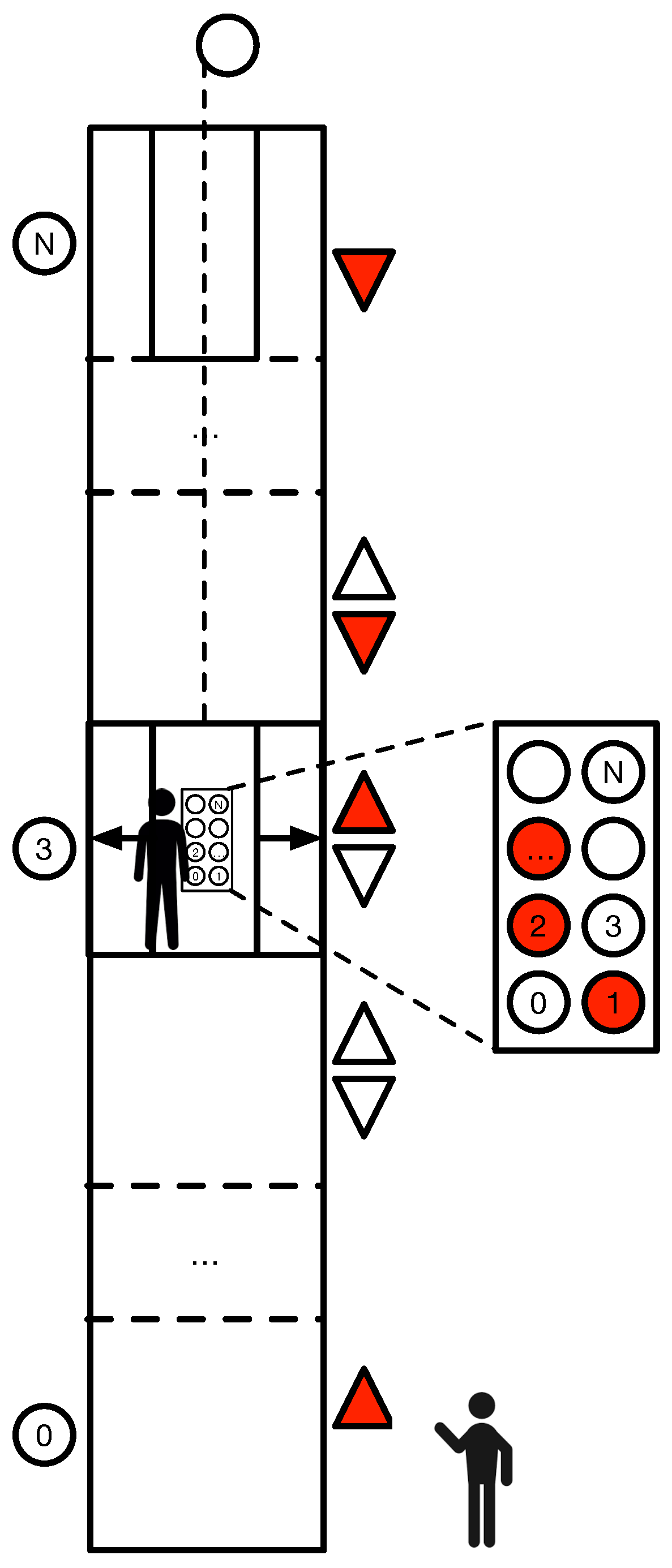
5. Elevator Model
System Requirements
6. Proposed Architecture
6.1. Hardware Design
6.1.1. Mapping

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Hardware | Software | |
|---|---|---|---|
| Sensors | Actuators | ||
| Elevation | Ground floor switch | Stepper with threaded rod | |
| Doors | Servo | ||
| Floor buttons inside cabin | Button (7-2) | ||
| Floor indicator | LCD-Screen | ||
| Cabin-caller | Potentiometer for selection, buttons (1-0) for up and down | LCD-Screen | |
| Path-optimizer | Queueing system | ||
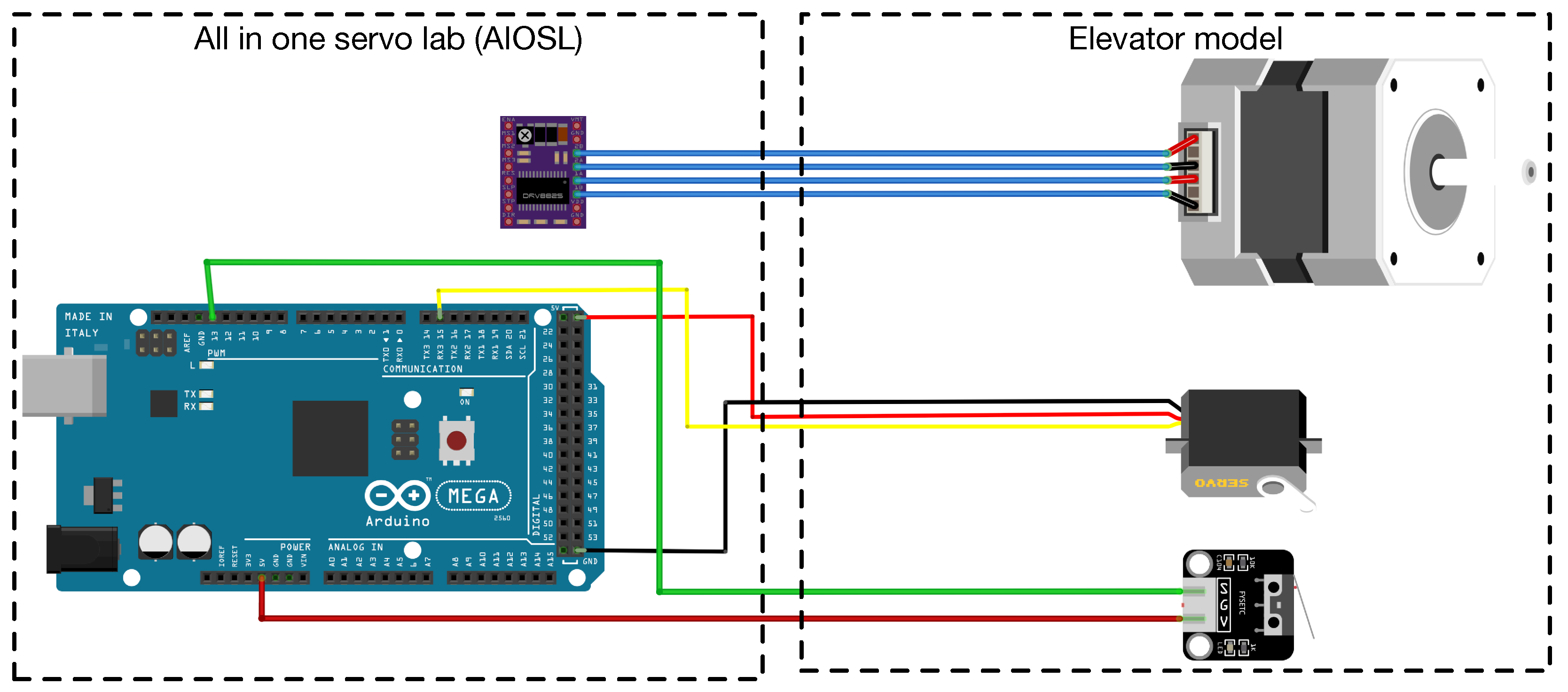
6.1.2. Connection to All in One Servo Lab (AIOSL)
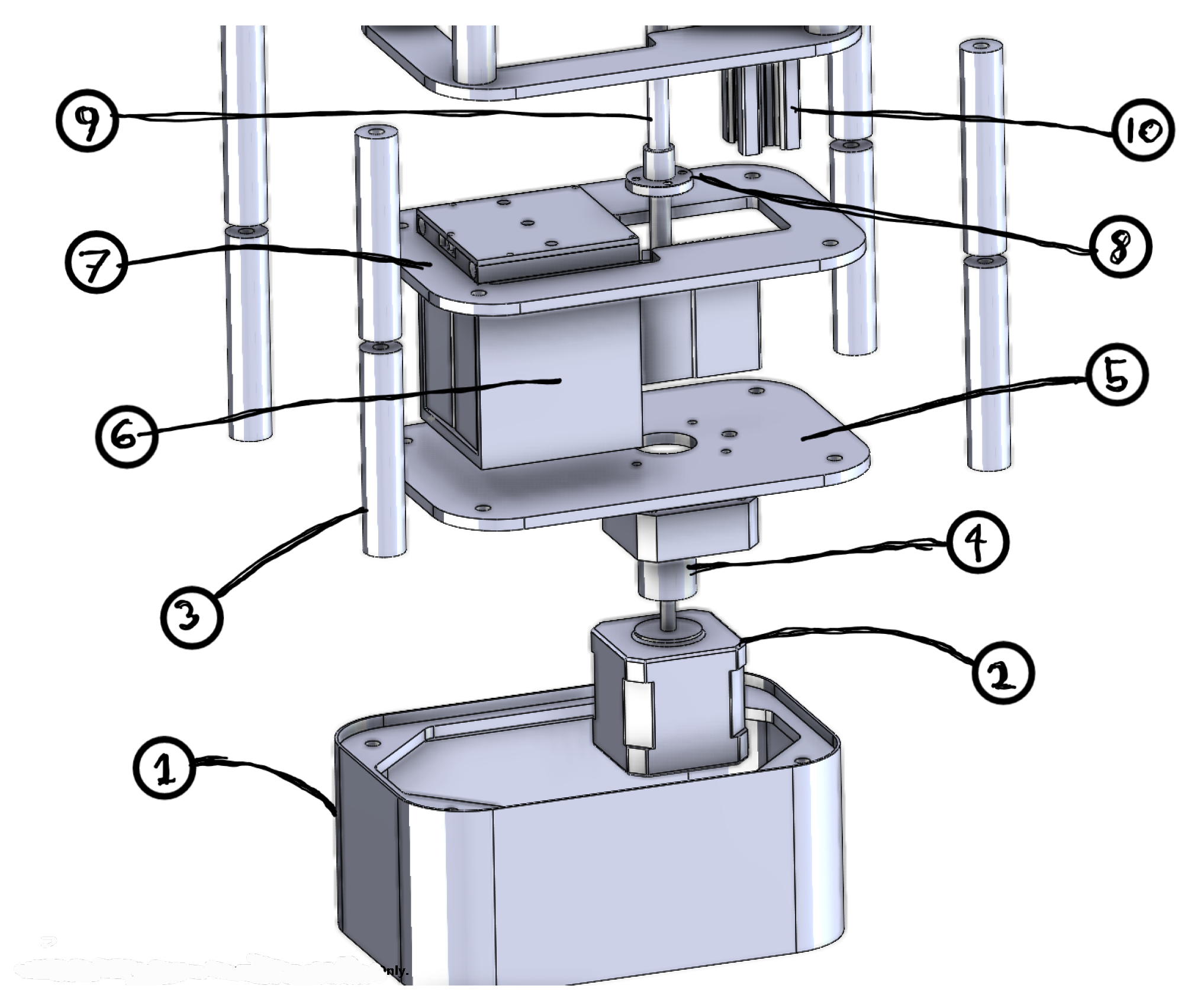
6.2. Mechanical Design
Assembly
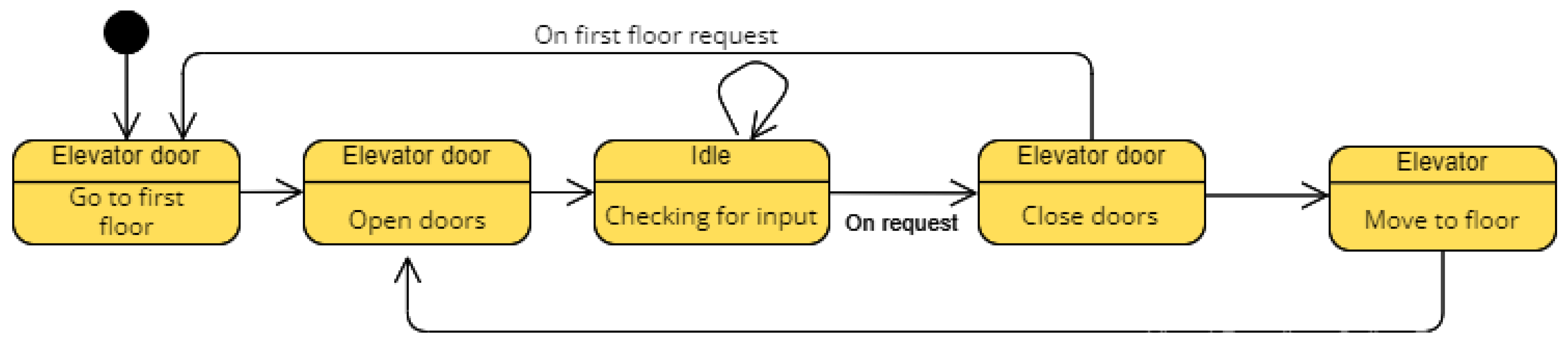
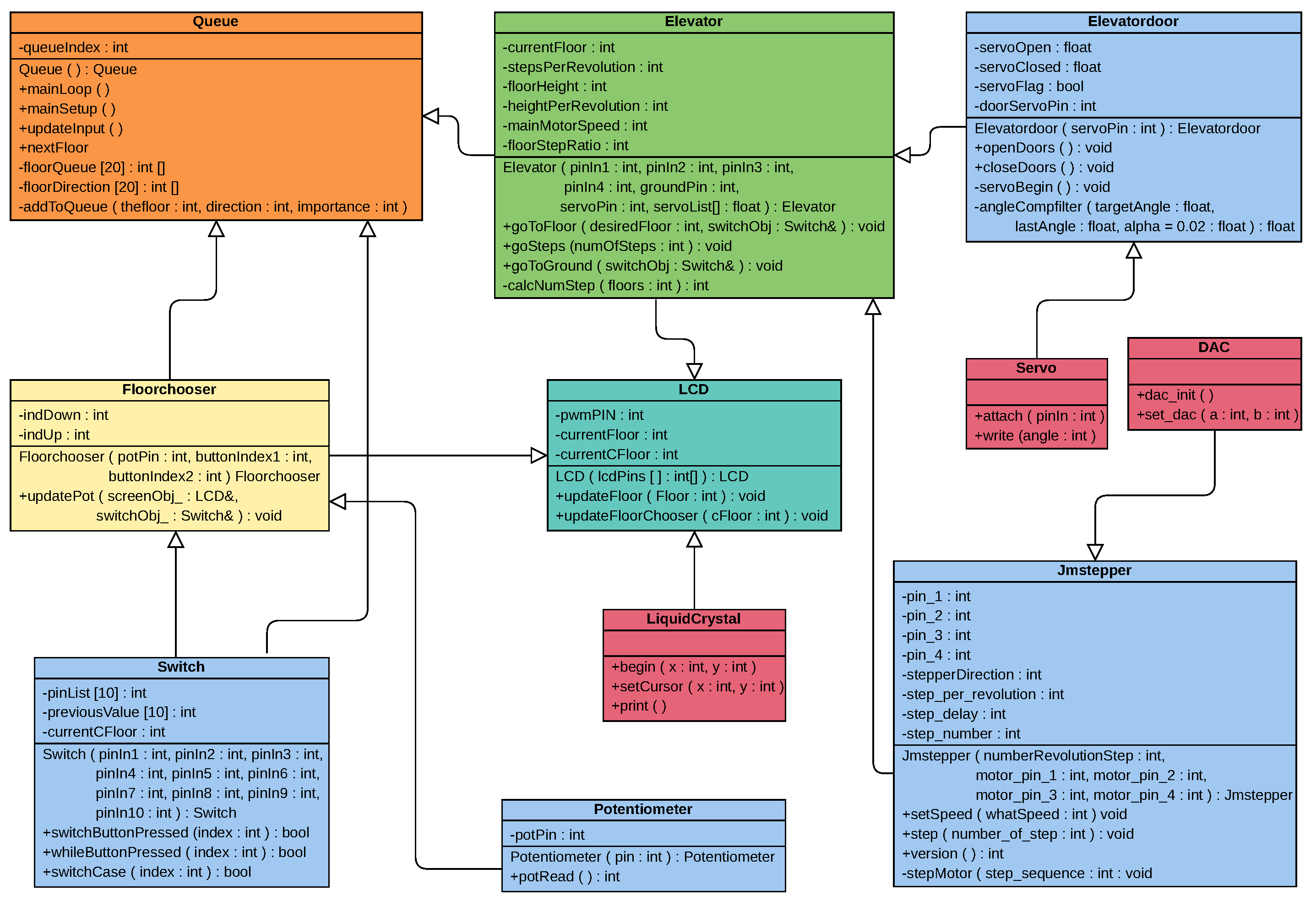
6.3. Software Design
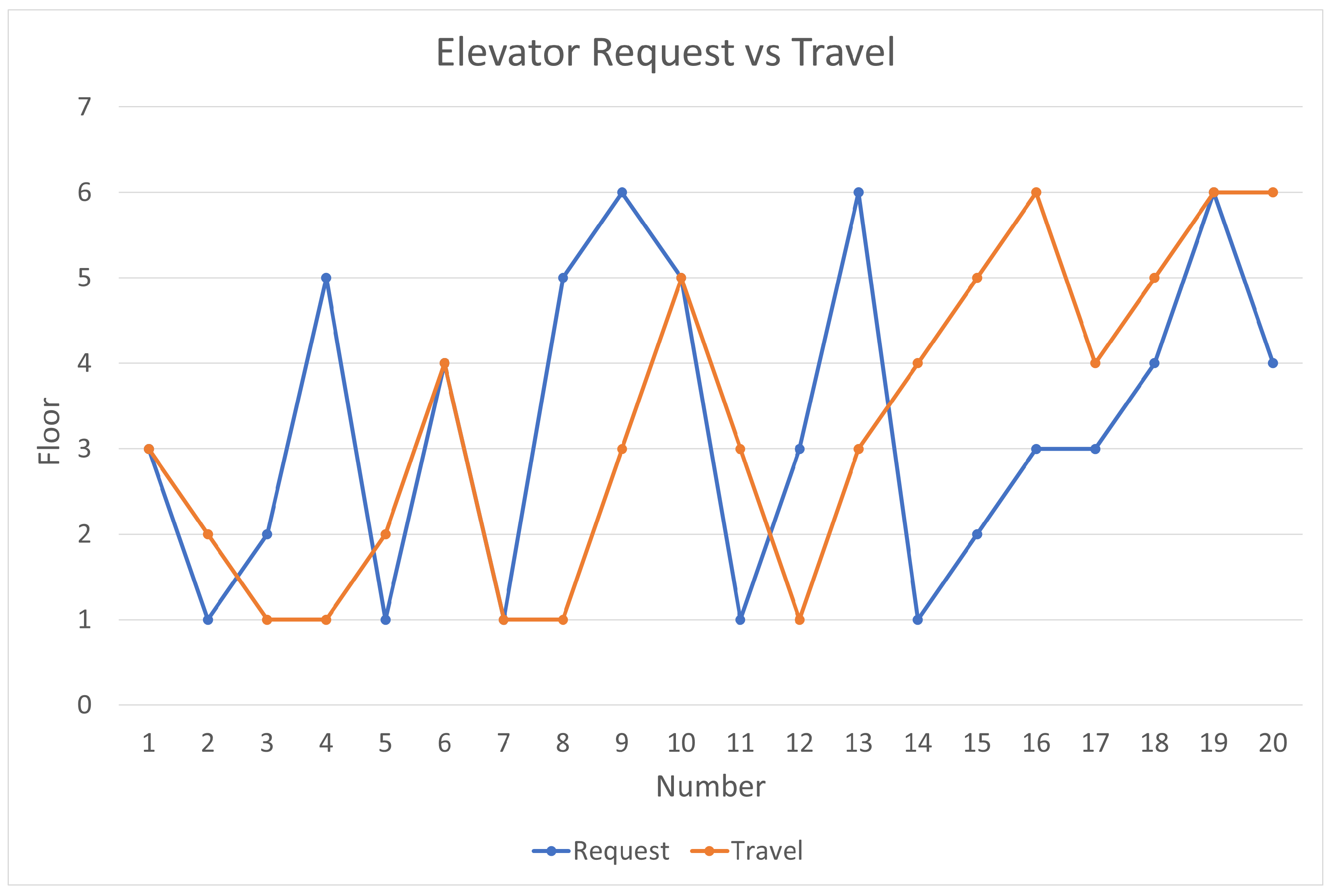
6.4. The Queuing Operator
| Listing 1: The prioritising section of the “Queue” class. |
|
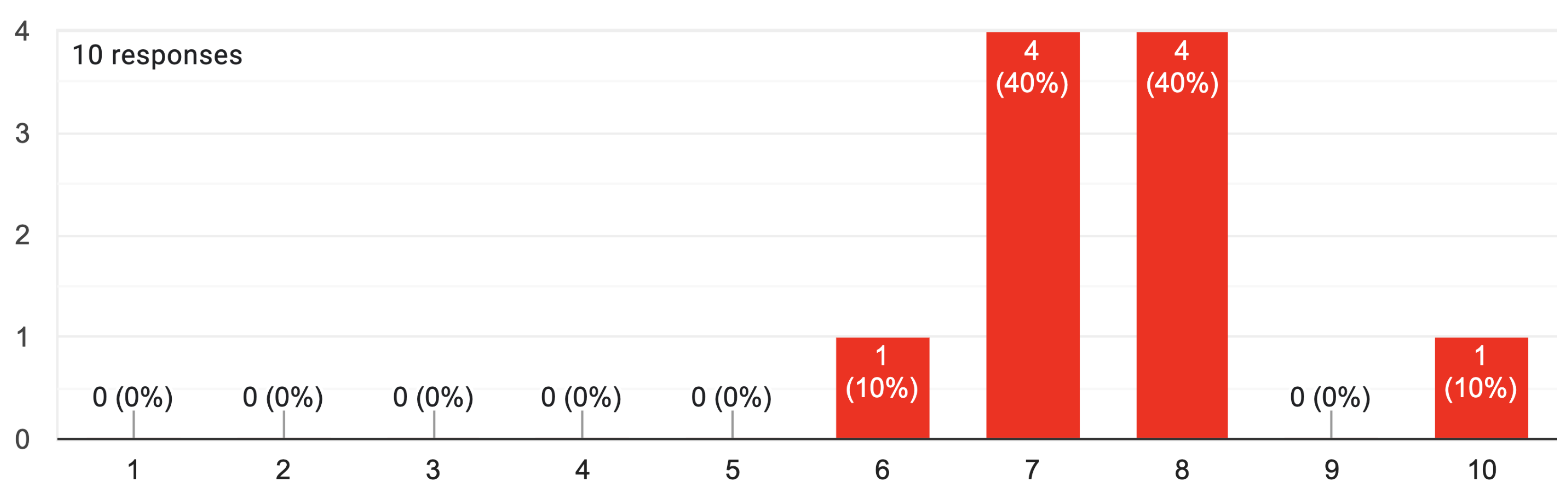
7. Course Learning Outcomes and Feedback from the Reference Group
8. Conclusions and Future Work
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AIOSL | All in one servo lab |
| PWM | Pulse–width modulation |
| IDE | Integrated development environment |
Appendix A
References
- Ma, J.; Li, X.; Tan, K.K. Advanced Optimization for Motion Control Systems; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Chung, W.K.; Fu, L.C.; Kröger, T. Motion control. In Springer Handbook of Robotics; Springer: Berlin, Germany, 2016; pp. 163–194. [Google Scholar]
- Sanfilippo, F.; Osen, O.L.; Alaliyat, S. Recycling A Discarded Robotic Arm For Automation Engineering Education. In Proceedings of the ECMS, Brescia, Italy, 27–30 May 2014; pp. 81–86. [Google Scholar]
- Sanfilippo, F.; Austreng, K. Enhancing teaching methods on embedded systems with project-based learning. In Proceedings of the IEEE International Conference on Teaching, Assessment, and Learning for Engineering (TALE), Wollongong, NSW, Australia, 4–7 December 2018; pp. 169–176. [Google Scholar]
- Sanfilippo, F.; Austreng, K. Sustainable Approach to Teaching Embedded Systems with Hands-On Project-Based Visible Learning. Int. J. Eng. Educ. 2021, 37, 814–829. [Google Scholar]
- University of Agder (UiA). Motion Control. 2022. Available online: https://www.uia.no/en/studieplaner/topic/MAS246-G (accessed on 7 March 2022).
- University of Agder (UiA). Feedback Control Systems 1. 2022. Available online: https://www.uia.no/en/studieplaner/topic/MAS239-G (accessed on 7 March 2022).
- University of Agder (UiA). Electrical Circuits and Digital Control. 2022. Available online: https://www.uia.no/en/studieplaner/topic/MAS134-G (accessed on 7 March 2022).
- University of Agder (UiA). Mathematics 1. 2022. Available online: https://www.uia.no/en/studieplaner/topic/MA-178-G (accessed on 7 March 2022).
- University of Agder (UiA). Mathematics 2. 2022. Available online: https://www.uia.no/en/studieplaner/topic/MA-179-G (accessed on 7 March 2022).
- University of Agder (UiA). Bachelor’s Programme in Mechatronics. 2022. Available online: https://www.uia.no/en/studieplaner/programme/INGMASK3 (accessed on 7 April 2022).
- Fowler, M. UML Distilled: A Brief Guide to the Standard Object Modeling Language; Addison-Wesley Professional: Boston, MA, USA, 2004. [Google Scholar]
- Henzinger, T.A.; Sifakis, J. The discipline of embedded systems design. Computer 2007, 40, 32–40. [Google Scholar] [CrossRef]
- Arduino. Arduino. 2022. Available online: https://www.arduino.cc/ (accessed on 7 April 2022).
- Sanfilippo, F.; Pacchierotti, C. A wearable haptic system for the health monitoring of elderly people in smart cities. Int. J. Online Eng. 2018, 14, 1–15. [Google Scholar] [CrossRef]
- Parate, S.; Lanjewar, S.; Dethe, R.; Hiwarkar, C. Four Quadrant Speed Control of DC Motor with Microcontroller ATmega 328 (Arduino Uno). Int. J. Res. Eng. Sci. Manag. 2020, 3, 62–65. [Google Scholar]
- Elanakova, V. Open-loop Control Algorithms for Stepper Motors. In Proceedings of the Aspire to Science, Novosibirsk, Russia, 18 April 2019; pp. 60–65. [Google Scholar]
- Tun, Z.M.; Naing, T.L. Double loop control of H-bridge DC chopper fed permanent magnet DC motor drives using low cost hardware. Int. J. Elect. Comput. Eng. 2018, 12, 857–866. [Google Scholar]
- The MathWorks, Inc. Six-Step Commutation of BLDC Motor Using Sensor Feedback. 2022. Available online: https://www.mathworks.com/help/mcb/gs/six-step-commutation-bldc-motor-using-position-sensor.html (accessed on 7 April 2022).
- Yuniarto, M.; Rijanto, E.; Mukhlisin, A. Design and Performance Analysis of Brushless Direct Current (BLDC) Motor Controller for Electric Scooter. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Jakarta, Indonesia, 9–10 October 2019; Volume 694, p. 012004. [Google Scholar]
- Wang, G.; Valla, M.; Solsona, J. Position sensorless permanent magnet synchronous machine drives—A review. IEEE Trans. Ind. Electron. 2019, 67, 5830–5842. [Google Scholar] [CrossRef]
- Celik, H.; Yigit, T. Field-oriented control of the PMSM with 2DOF PI controller tuned by using PSO. In Proceedings of the IEEE International Conference on Artificial Intelligence and Data Processing (IDAP), Malatya, Turkey, 28–30 September 2018; pp. 1–4. [Google Scholar]
- O’Rourke, C.J.; Qasim, M.M.; Overlin, M.R.; Kirtley, J.L. A geometric interpretation of reference frames and transformations: dq0, clarke, and park. IEEE Trans. Energy Convers. 2019, 34, 2070–2083. [Google Scholar] [CrossRef]
- Singh, A.K.; Das, M.; Basumatary, D.; Roy, G. A Review note on Compensator Design for Control Education and Engineering. Int. J. Eng. Res. Technol. 2014, 3, 2493. [Google Scholar]
- Plaza, P.; Sancristobal, E.; Carro, G.; Blazquez, M.; García-Loro, F.; Martin, S.; Perez, C.; Castro, M. Arduino as an educational tool to introduce robotics. In Proceedings of the IEEE International Conference on Teaching, Assessment, and Learning for Engineering (TALE), Wollongong, NSW, Australia, 4–7 December 2018; pp. 1–8. [Google Scholar]
- Adel, Z.; Hamou, A.A.; Abdellatif, S. Design of Real-time PID tracking controller using Arduino Mega 2560for a permanent magnet DC motor under real disturbances. In Proceedings of the IEEE International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Algiers, Algeria, 28–31 October 2018; pp. 1–5. [Google Scholar]
- Larman, C.; Basili, V.R. Iterative and incremental developments. a brief history. Computer 2003, 36, 47–56. [Google Scholar] [CrossRef]
- Hørthe, A.; Nødland, H.; Preus-Olsen, B. All in One Servo Lab, ArduinoTM-Based Laboratory Platform for Microcontroller Operated Servo Systems; University of Agder (UiA): Grimstad, Norway, 2019. [Google Scholar]
- Hoang, T.S. An Elevator System—Requirements Document. 2022. Available online: https://eprints.soton.ac.uk/422715/2/elevator_requirements.pdf (accessed on 7 April 2022).
- Sanfilippo, F.; Blazauskas, T.; Salvietti, G.; Ramos, I.; Vert, S.; Radianti, J.; Majchrzak, T.A.; Oliveira, D. A Perspective Review on Integrating VR/AR with Haptics into STEM Education for Multi-Sensory Learning. Robotics 2022, 11, 41. [Google Scholar] [CrossRef]
- Sanfilippo, F.; Blažauskas, T.; Girdžiūna, M.; Janonis, A.; Kiudys, E.; Salvietti, G. A multi-modal auditory-visual-tactile e-learning framework. In Proceedings of the International Conference on Intelligent Technologies and Applications, Grimstad, Norway, 11–13 October 2021; Springer: Cham, Switzerland, 2022; pp. 119–131. [Google Scholar]











| Lectures | Laboratory | Project |
|---|---|---|
| 12 lectures | 12 laboratories | elevator project |
| REQ 1 | The system controls the movement of an elevator. |
|---|---|
| REQ 2 | The number of floors is set. |
| REQ 3 | The elevator is either going up or going down. |
| REQ 4 | The elevator is driven by a motor which can be either WINDING, UNWIDING, or STOPPED. |
| REQ 5 | If not at the top floor, the cabin moves up one floor if the motor is WINDING |
| REQ 6 | If not at the bottom floor, the cabin moves down one floor if the motor is UNWINDING |
| REQ 7 | The cabin has a door which can be OPEN, HALF, or CLOSED. |
| REQ 8 | While the cabin is moving, its door must be closed. |
| REQ 9 | On each floor except the top one, there is an “up” button. |
| REQ 10 | On each floor except the bottom one, there is a “down” button. |
| REQ 11 | Inside the cabin, there are floor buttons, one for each floor. |
| REQ 12 | The cabin stops at a particular floor and opens the door if there is a request to serve at that particular floor. |
| REQ 13 | The requests at one floor are cleared once the door is fully open. |
| REQ 14 | The elevator should not move to leave a floor if there are requests to serve at that floor. |
| REQ 15 | The elevator should stay stationary at a floor when there are no requests. |
| REQ 16 | The elevator can only change direction if it has no requests in the same direction but has some requests in the opposite direction. |
| Article | Material | Size | Qty. | Comment |
|---|---|---|---|---|
| Threaded rod | Steel | Ø 8 mm–470 mm | 1 | |
| Lead nut | Brass | Hole 8 mm | 1 | |
| V-slot Rat Rig profile | Aluminium | 20 × 20 × 500 mm | 1 | |
| Threaded rod | Steel | M5-500 mm | 4 | |
| Nut | Steel | M5 | 8 | |
| Flex axle | Steel | 3 mm–8 mm | 1 | |
| Lock nut | Steel | 5 mm | 4 | |
| Tube spacer | PLA | 70 mm | 24 | 3D-printed |
| Short tube spacer | PLA | 25 mm | 4 | 3D-printed |
| Stepper spacer | PLA | 42 × 42 × 18 mm | 1 | 3D-printed |
| Bottom skirt | PLA | 152 × 102 × 68 mm | 1 | 3D-printed |
| Cabin + cabindoor setup | PLA | 1 | 3D-printed | |
| M3 machine screw | Steel | 4 | ||
| Bottom floor | Acrylic | 150 × 100 × 4 mm | 1 | Laser cut |
| Mid floor | Acrylic | 150 × 100 × 4 mm | 6 | Laser cut |
| Top floor | Acrylic | 150 × 100 × 4 mm | 1 | Laser cut |
| Door servo | 1 | |||
| Stepper motor | 1 | 17HS4401 | ||
| Wires |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sanfilippo, F.; Økter, M.; Eie, T.; Ottestad, M. Teaching Motion Control in Mechatronics Education Using an Open Framework Based on the Elevator Model. Machines 2022, 10, 945. https://doi.org/10.3390/machines10100945
Sanfilippo F, Økter M, Eie T, Ottestad M. Teaching Motion Control in Mechatronics Education Using an Open Framework Based on the Elevator Model. Machines. 2022; 10(10):945. https://doi.org/10.3390/machines10100945
Chicago/Turabian StyleSanfilippo, Filippo, Martin Økter, Tine Eie, and Morten Ottestad. 2022. "Teaching Motion Control in Mechatronics Education Using an Open Framework Based on the Elevator Model" Machines 10, no. 10: 945. https://doi.org/10.3390/machines10100945
APA StyleSanfilippo, F., Økter, M., Eie, T., & Ottestad, M. (2022). Teaching Motion Control in Mechatronics Education Using an Open Framework Based on the Elevator Model. Machines, 10(10), 945. https://doi.org/10.3390/machines10100945