
Natural Source Electromagnetic Component Exploration of Coalbed Methane Reservoirs

Abstract
:1. Introduction
2. Natural Source Magnetic Component Sounding Theory
3. Forward Modeling and Inversion Algorithms
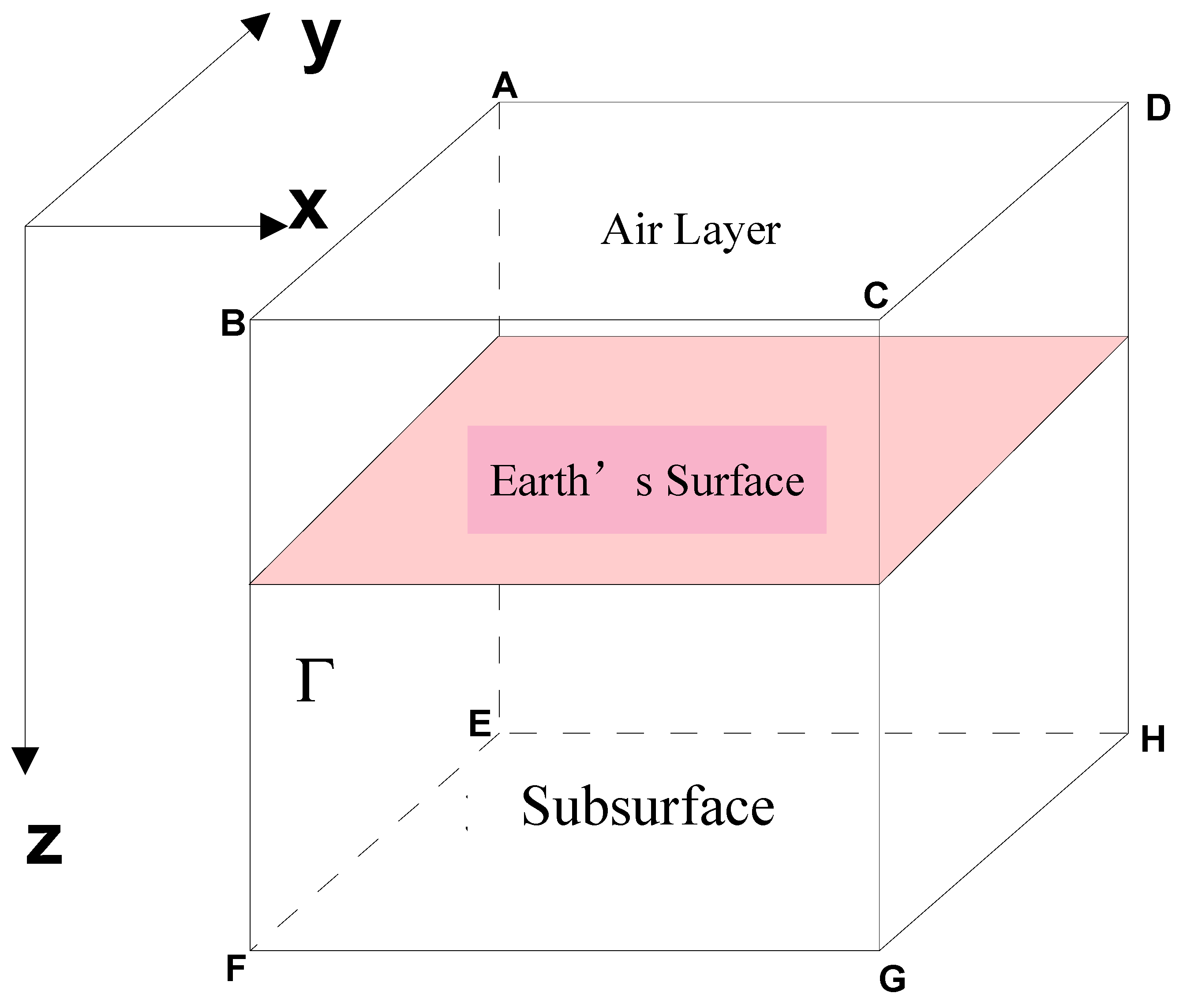
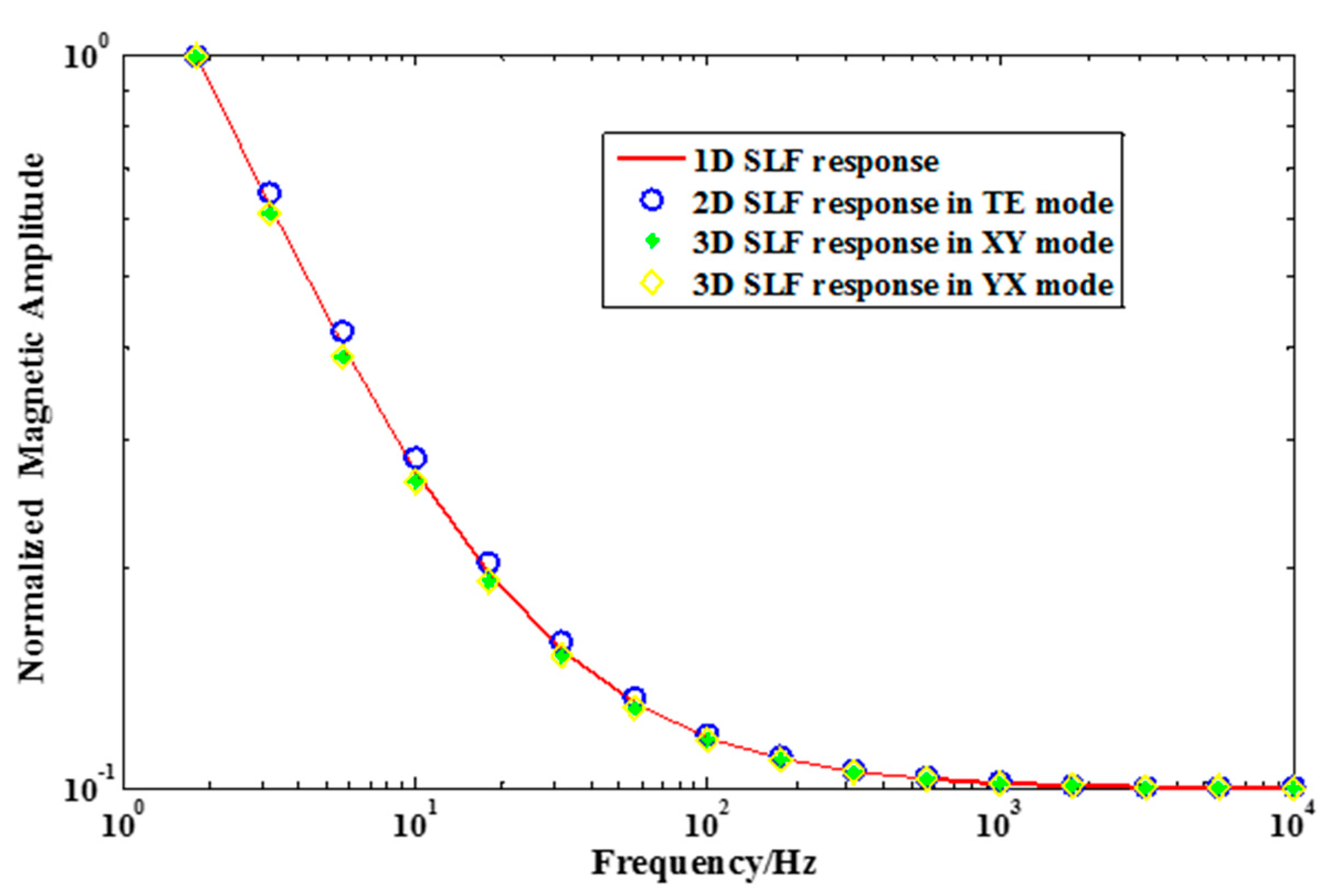
3.1. Finite Element Forward Modeling
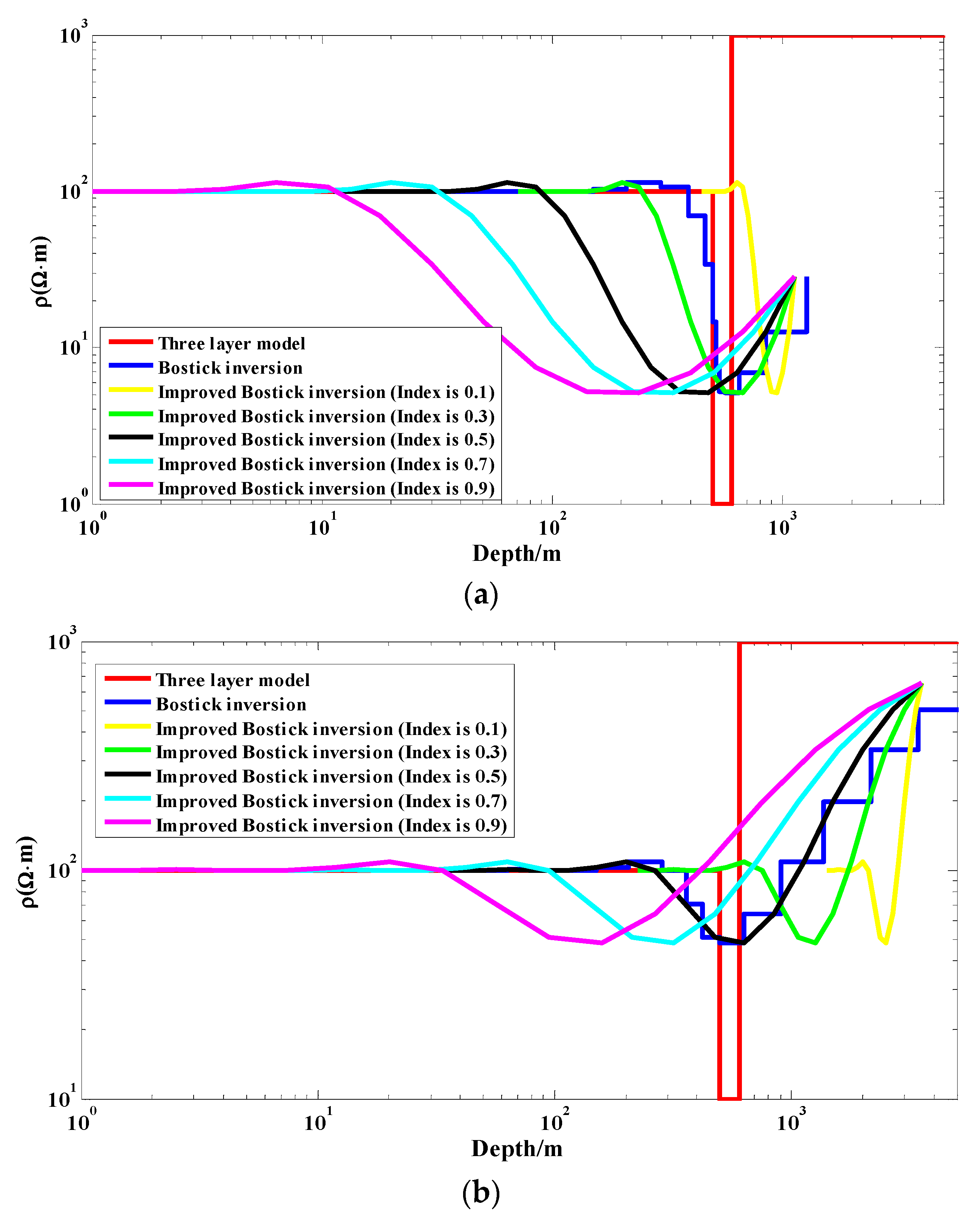
3.2. Direct Frequency-Depth Transformation
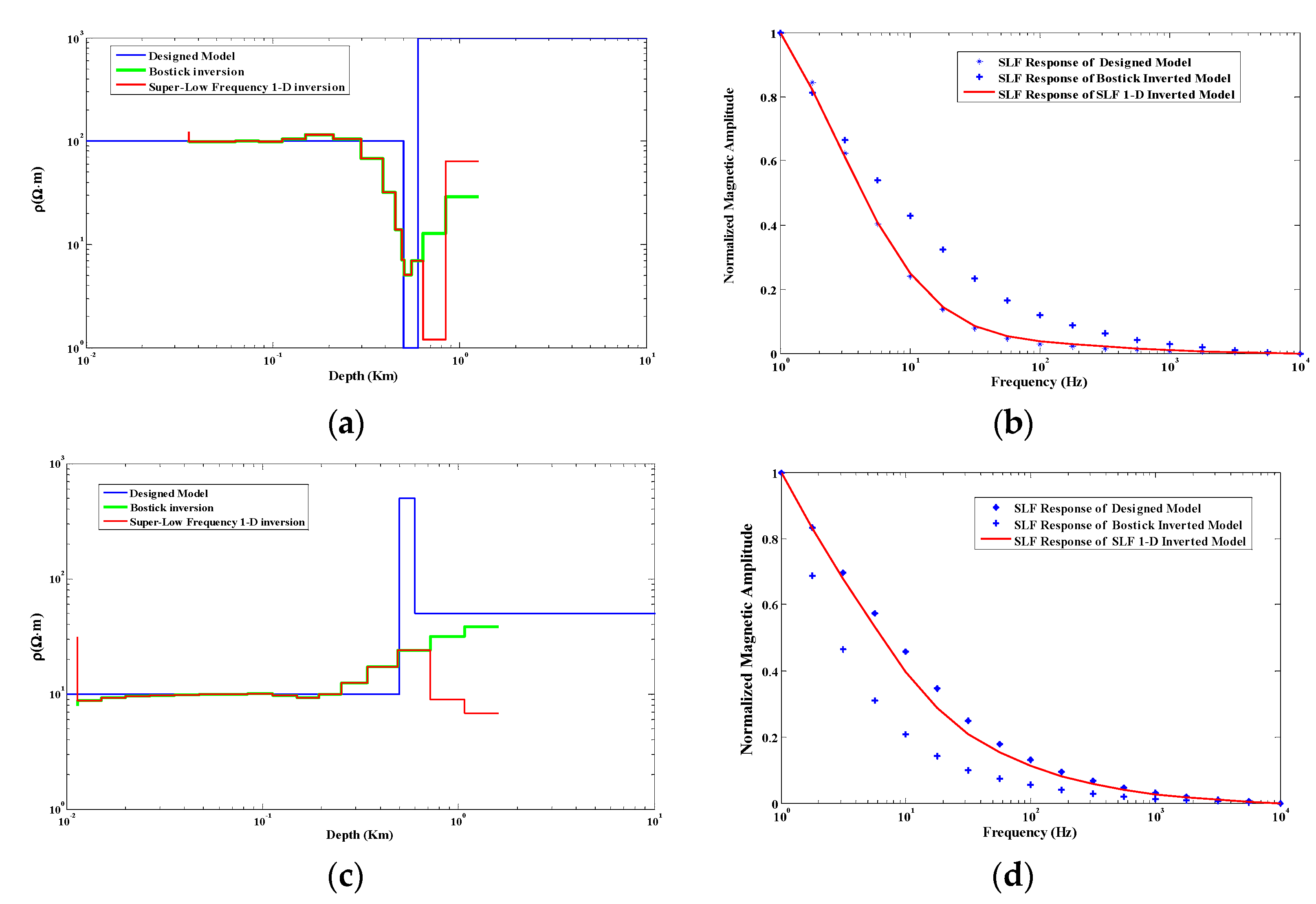
3.3. Nonlinear Regularization Inversion Algorithms
4. Magnetic Component Detection and Data Processing
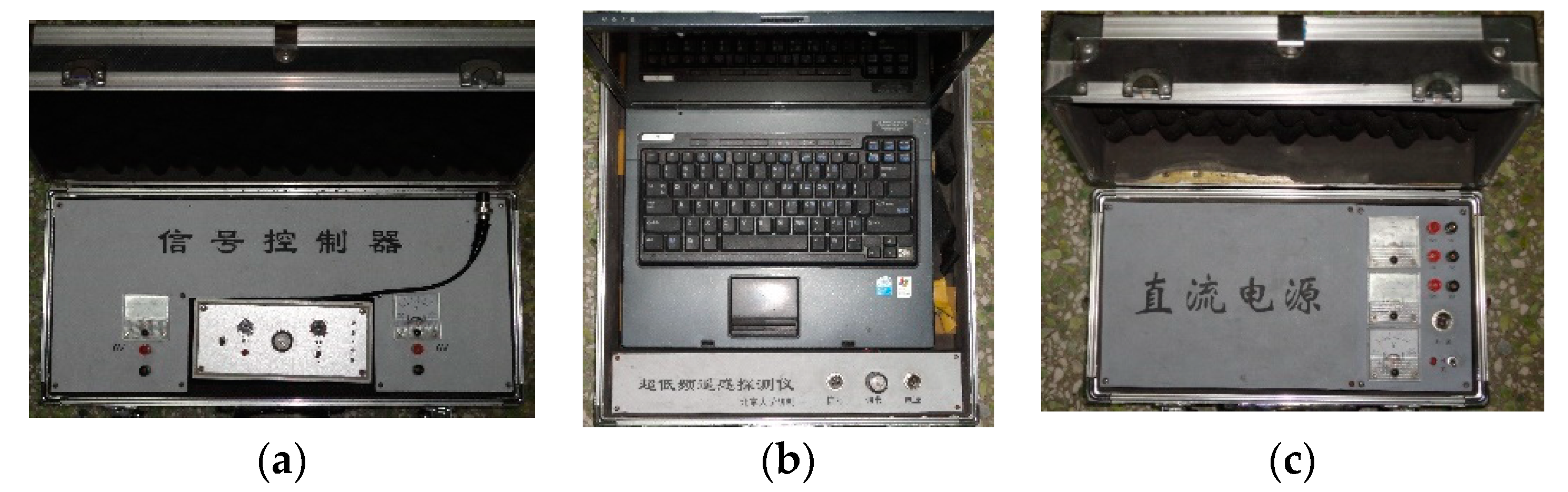
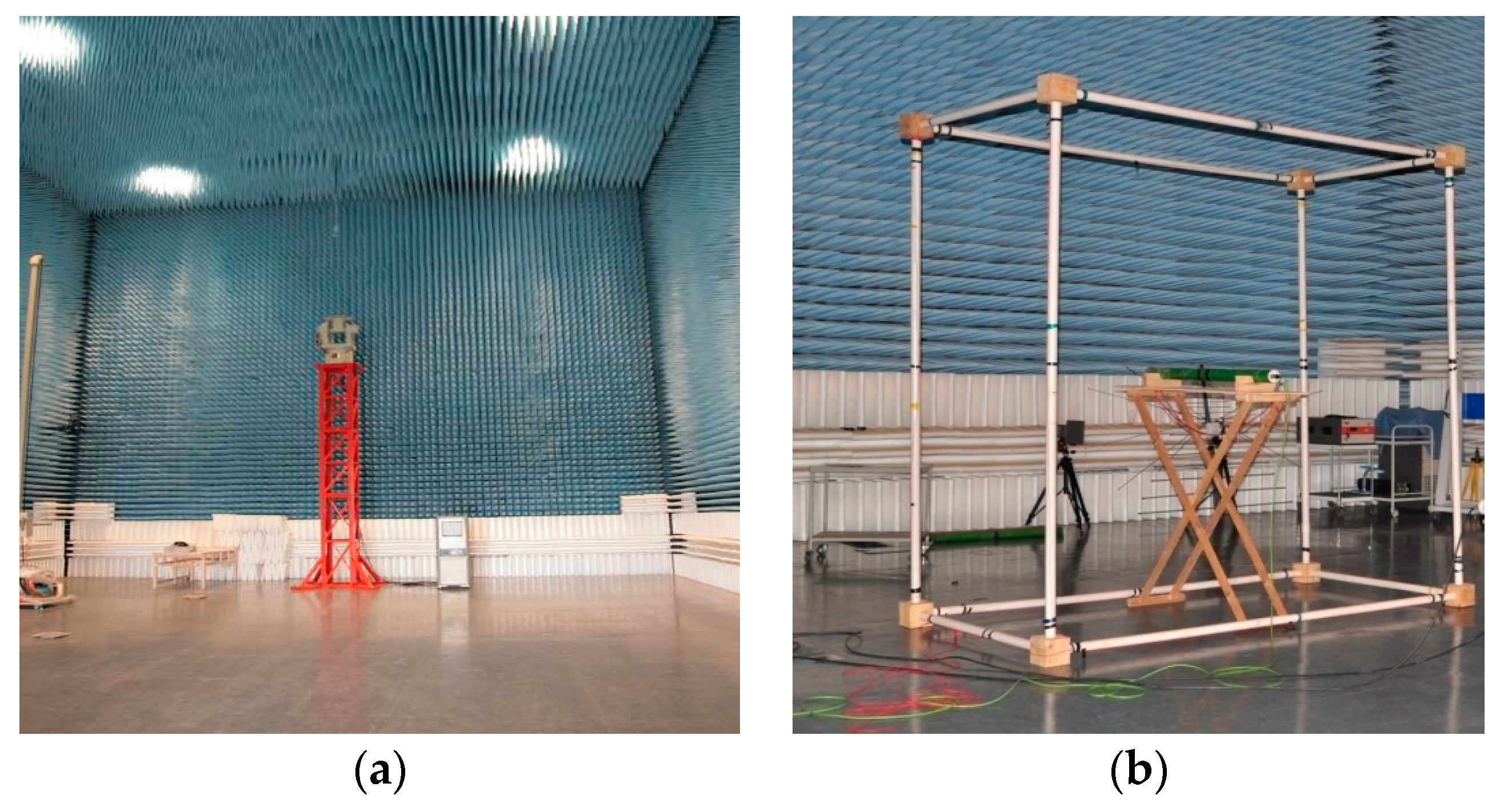
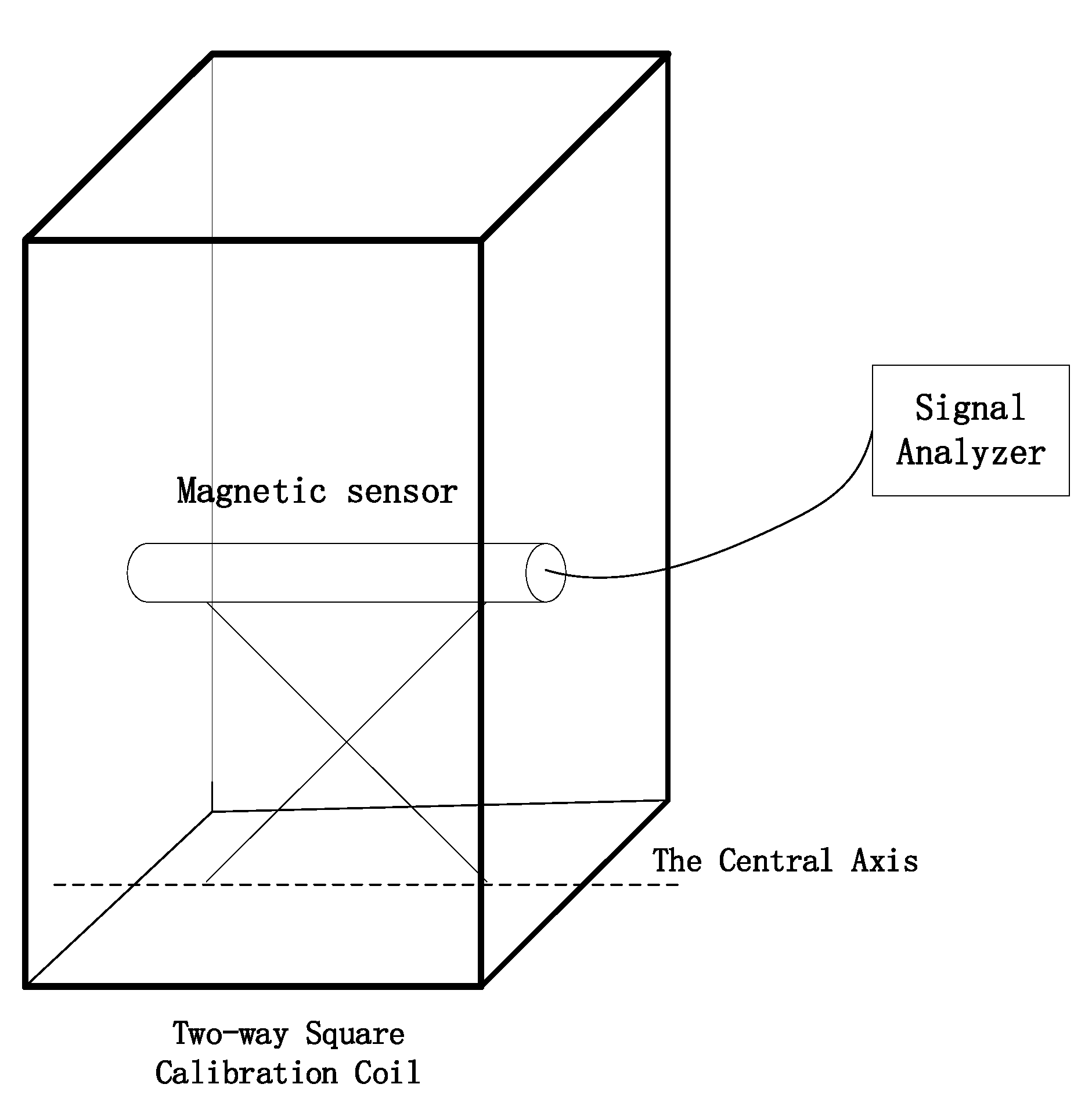
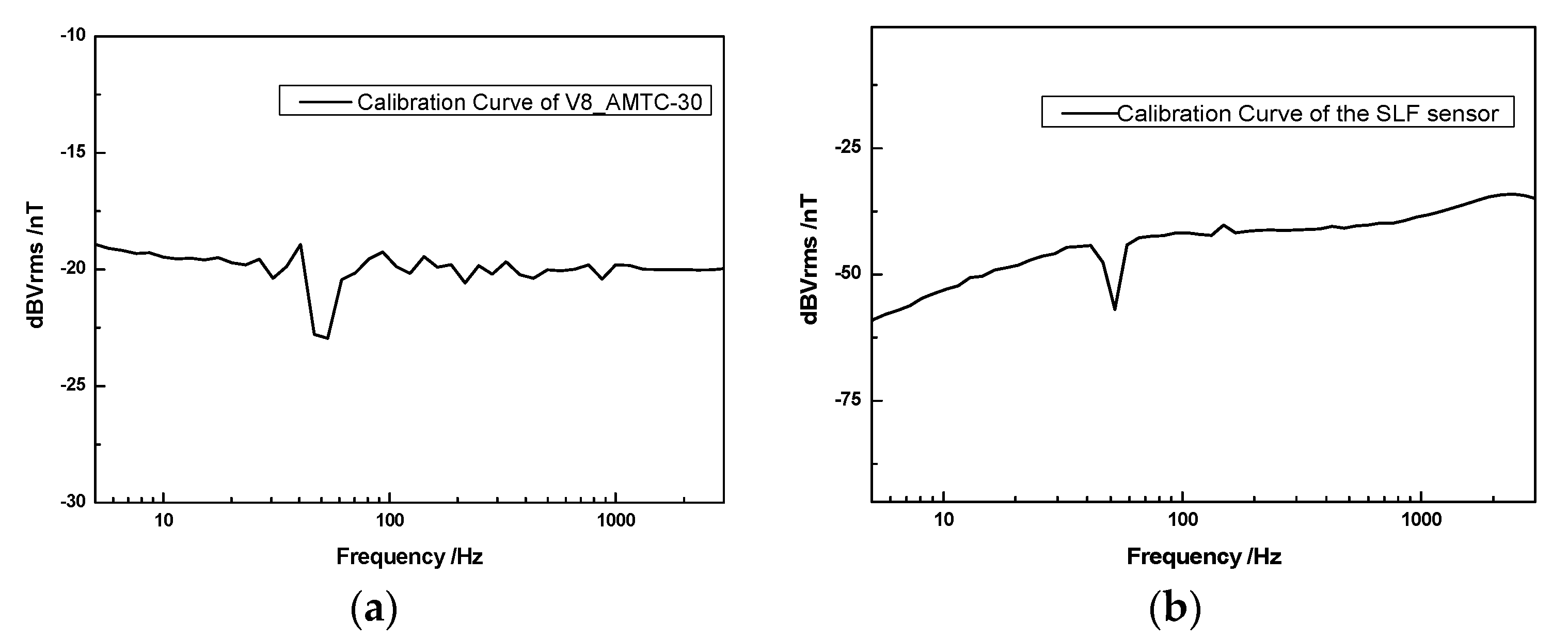
4.1. BD-6 Magnetic Sensor and Its Calibration
4.2. Magnetic Component Signal Processing
5. CBM Reservoir Interpretation in Qinshui Basin
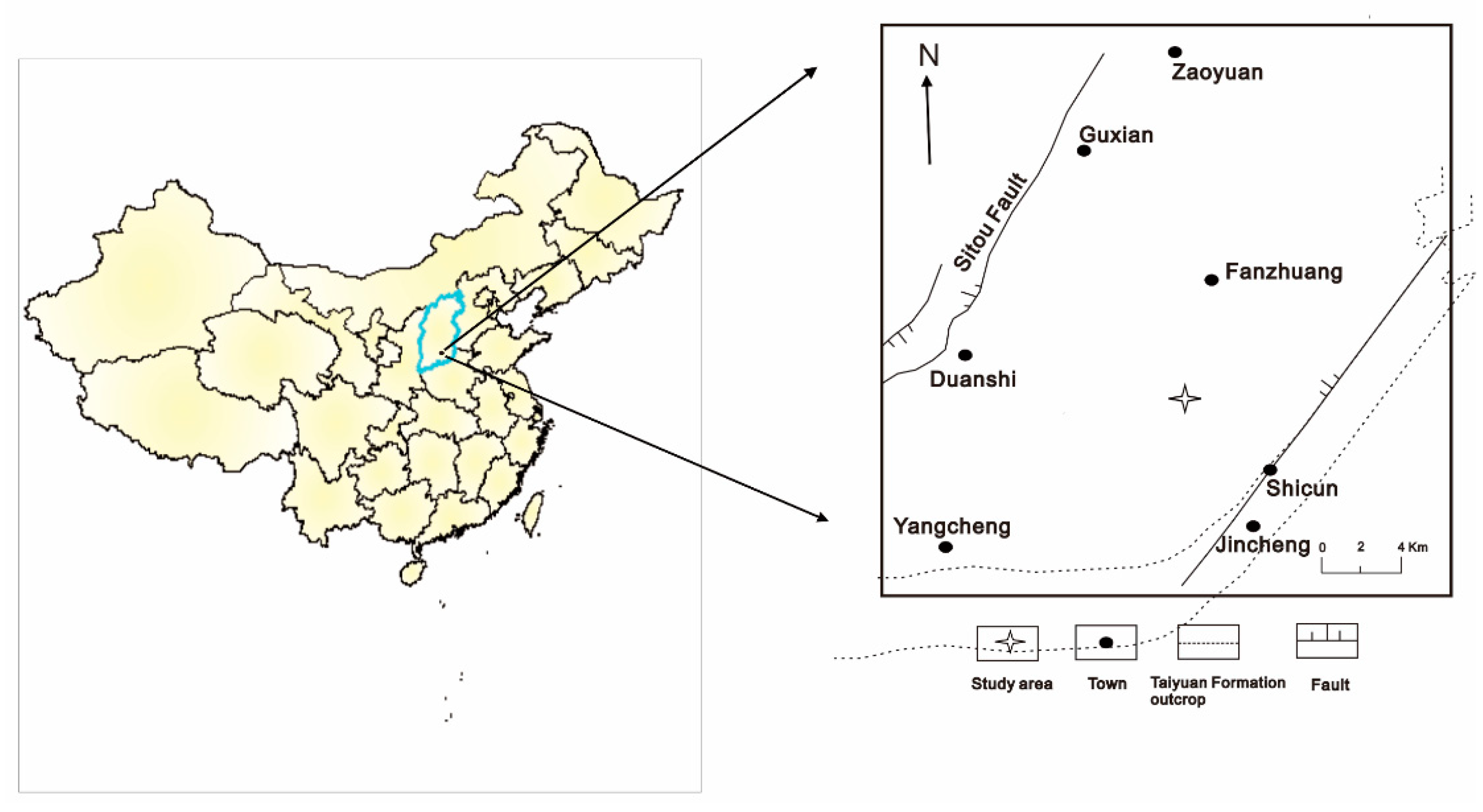
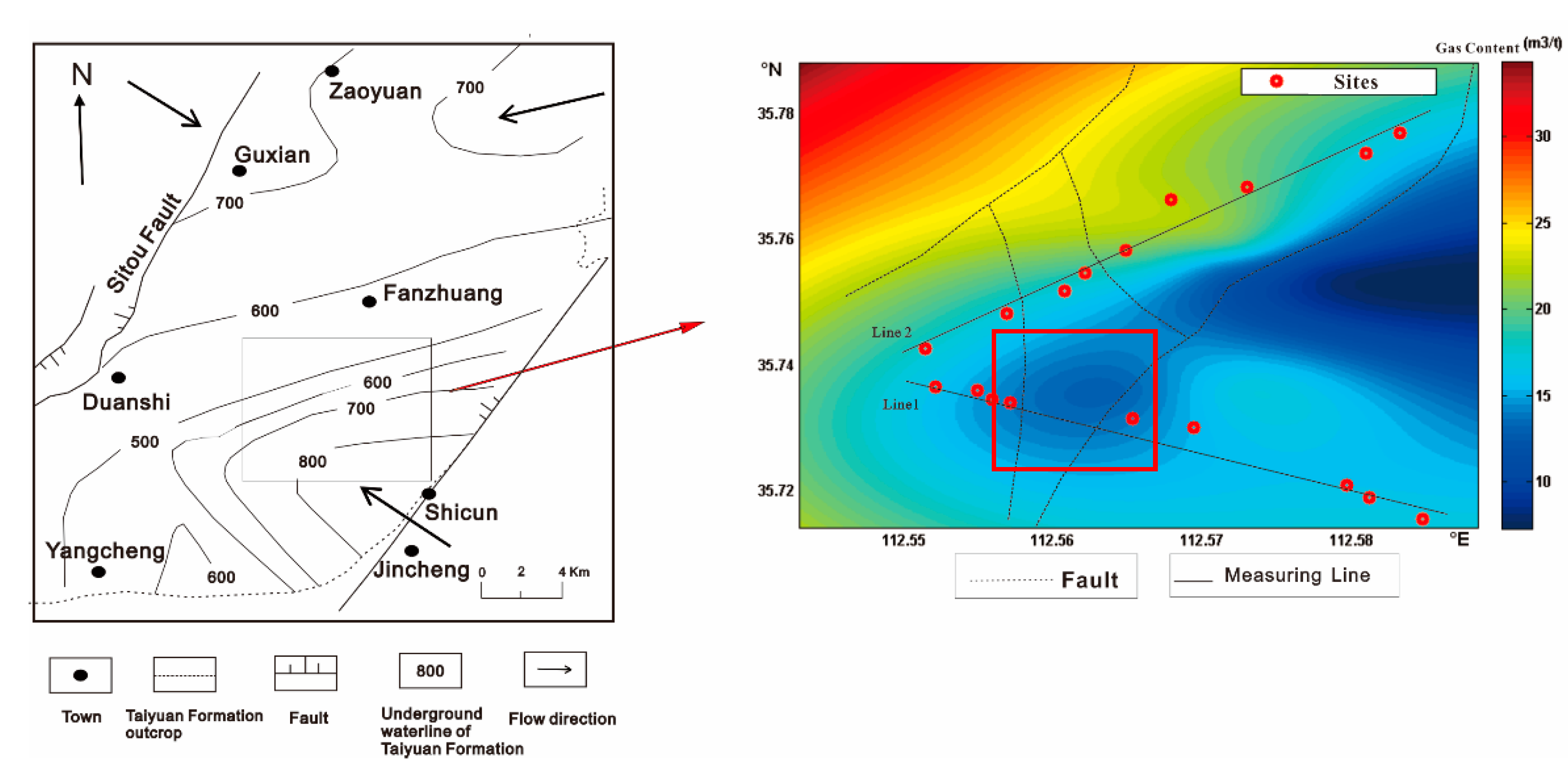
5.1. Study Area and Field Experiments
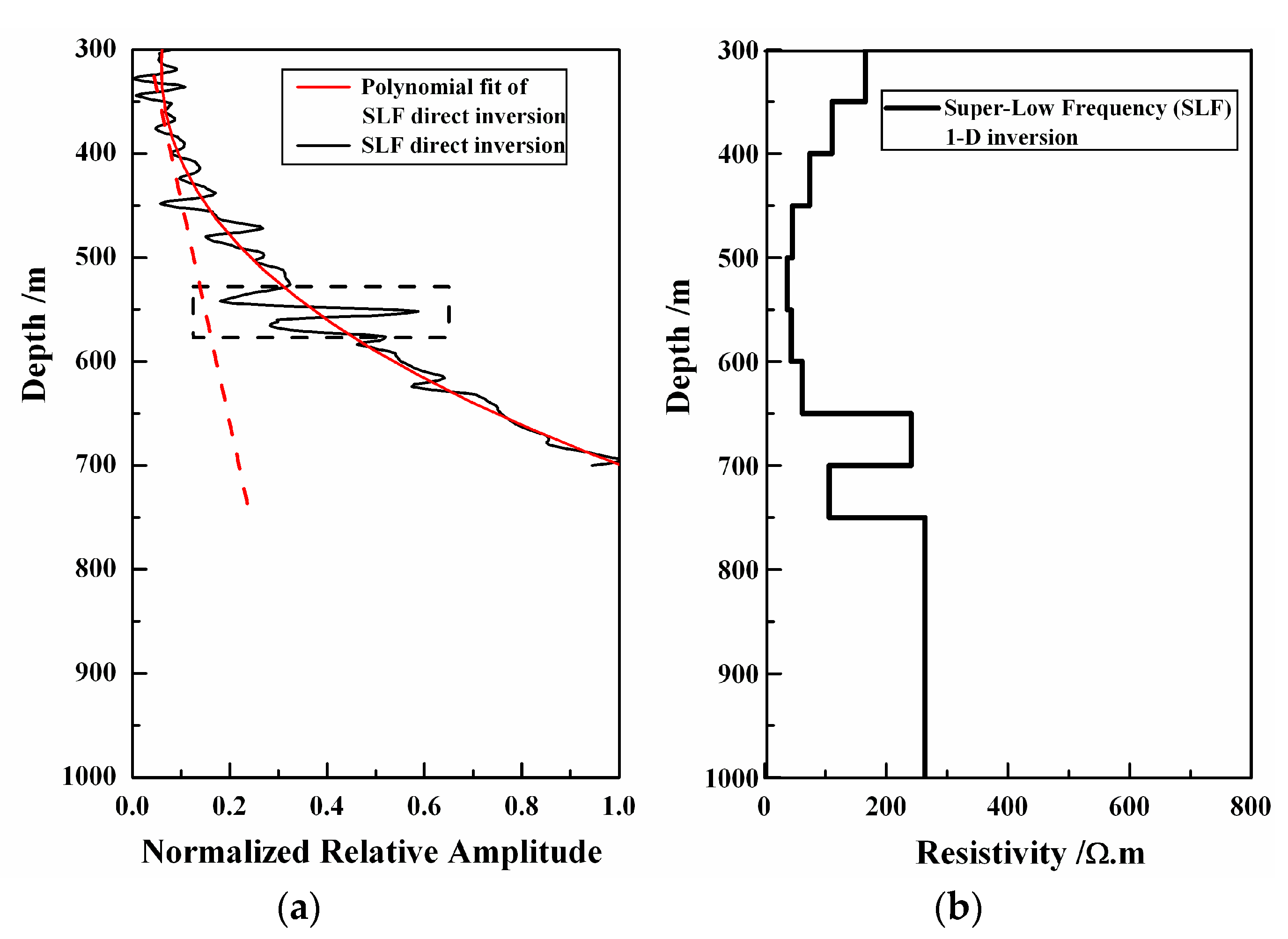
5.2. Reservoir Interpretation Based on Low-Resistivity Features
5.3. Reservoir Identification Using Electromagnetic Radiation Anomalies
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Song, Y.; Zhang, X.; Liu, S. Coalbed Methane in China; Science Press: Beijing, China, 2021. [Google Scholar]
- Lu, Y.Y.; Zhang, H.D.; Zhou, Z.; Ge, Z.L.; Chen, C.J.; Hou, Y.D.; Ye, M.L. Current Status and Effective Suggestions for Efficient Exploitation of Coalbed Methane in China: A Review. Energy Fuels 2021, 35, 9102–9123. [Google Scholar] [CrossRef]
- Duan, L.; Qu, L.; Xia, Z.; Liu, L.; Wang, J. Stochastic Modeling for Estimating Coalbed Methane Resources. Energy Fuels 2019, 34, 5196–5204. [Google Scholar] [CrossRef]
- Su, X.; Li, F.; Su, L.; Wang, Q. The Experimental Study on Integrated Hydraulic Fracturing of Coal Measures Gas Reservoirs. Fuel 2020, 270, 117527. [Google Scholar] [CrossRef]
- Shen, S.; Fang, Z.; Li, X. Laboratory Measurements of the Relative Permeability of Coal: A Review. Energies 2020, 13, 5568. [Google Scholar] [CrossRef]
- Zhang, J.; Si, L.; Chen, J.; Kizil, M.; Wang, C.; Chen, Z. Stimulation Techniques of Coalbed Methane Reservoirs. Geofluids 2020, 2020, 5152646. [Google Scholar] [CrossRef]
- Peng, F.; Peng, S.; Du, W.; Liu, H. Coalbed Methane Content Prediction Using Deep Belief Network. Interpretation 2020, 8, T309–T321. [Google Scholar] [CrossRef]
- Tao, S.; Chen, S.; Pan, Z. Current Status, Challenges, and Policy Suggestions for Coalbed Methane Industry Development in China: A Review. Energy Sci. Eng. 2019, 7, 1059–1074. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Ma, C.; Sun, Y. 2D Magnetotelluric Forward Modelling for Deep Buried Water-Rich Fault and Its Application. J. Appl. Geophys. 2021, 192, 104403. [Google Scholar] [CrossRef]
- Weiss, C.J.; Newman, G.A. Electromagnetic Induction in a Fully 3-D Anisotropic Earth. Geophysics 2002, 67, 1104–1114. [Google Scholar] [CrossRef]
- Shi, Z.; Zhao, Y.; Ma, L.; Peng, X.; Xu, Y.; Guo, S.; Wang, M.; Wang, Y. Simulation and Experiment of Underwater Target Active Electromagnetic Detection Based on SLF/ELF Artificial Source. Sci. Discov. 2021, 9, 58. [Google Scholar] [CrossRef]
- Meju, M.A. Joint inversion of TEM and distorted MT soundings: Some effective practical considerations. Geophysics 1996, 61, 56–65. [Google Scholar] [CrossRef]
- Zhdanov, M.S. Electromagnetic Geophysics: Notes from the past and the Road Ahead. Geophysics 2010, 75, A49–A66. [Google Scholar] [CrossRef]
- Lichtenberger, M. Underground Measurements of Electromagnetic Radiation Related to Stress-Induced Fractures in the Odenwald Mountains (Germany). Pure Appl. Geophys. 2006, 163, 1661–1677. [Google Scholar] [CrossRef]
- Greiling, R.O.; Obermeyer, H. Natural Electromagnetic Radiation (EMR) and its Application in Structural Geology and Neotectonics. J. Geol. Soc. India 2010, 75, 278–288. [Google Scholar] [CrossRef]
- Chave, A.D.; Booker, J.R. Electromagnetic Induction Studies. Rev. Geophys. 1987, 25, 989–1003. [Google Scholar] [CrossRef] [Green Version]
- Groom, R.W.; Bailey, R.C. Decomposition of Magnetotelluric Impedance Tensors in the Presence of Local Three-Dimensional Galvanic Distortion. J. Geophys. Res. 1989, 94, 1913–1925. [Google Scholar] [CrossRef] [Green Version]
- McNeice, G.W.; Jones, A.G. Multisite, Multifrequency Tensor Decomposition of Magnetotelluric Data. Geophysics 2001, 66, 158–173. [Google Scholar] [CrossRef]
- Nam, M.J.; Kim, H.J.; Song, Y.; Lee, T.J.; Suh, J.H. Three-Dimensional Topography Corrections of Magnetotelluric Data. Geophys. J. Int. 2008, 174, 464–474. [Google Scholar] [CrossRef] [Green Version]
- Ritter, O.; Junge, A.; Dawes, G.J.K. New Equipment and Processing for Magnetotelluric Remote Reference Observations. Geophys. J. Int. 1998, 132, 535–548. [Google Scholar] [CrossRef] [Green Version]
- Egbert, G.D.; Booker, J.R. Robust Estimation of Geomagnetic Transfer Functions. Geophys. J. R. Astron. Soc. 1986, 87, 173–194. [Google Scholar] [CrossRef] [Green Version]
- Gamble, T.D.; Goubau, W.M.; Clarke, J. Magnetotellurics with a Remote Magnetic Reference. Geophysics 1979, 44, 53–68. [Google Scholar] [CrossRef] [Green Version]
- Smirnov, M.Y. Magnetotelluric Data Processing with a Robust Statistical Procedure Having a High Breakdown Point. Geophys. J. Int. 2003, 152, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Garcia, X.; Jones, A.G. Robust Processing of Magnetotelluric Data in the Amt Dead Band Using the Continuous Wavelet Transform. Geophysics 2008, 73, F223–F234. [Google Scholar] [CrossRef] [Green Version]
- Shireesha, M.; Harinarayana, T. Processing of Magnetotelluric Data—A Comparative Study with 4 and 6 Element Impedance Tensor Elements. Appl. Geophys. 2011, 8, 285–292. [Google Scholar] [CrossRef]
- Jones, A.G. Distortion Decomposition of the Magnetotelluric Impedance Tensors from a One-Dimensional Anisotropic Earth. Geophys. J. Int. 2012, 189, 268–284. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-stationary Time Series Analysis. Proc. R. Soc. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, S.; Hui, J.; Qin, Q. Passive Super-Low Frequency Electromagnetic Prospecting Technique. Front. Earth Sci. 2017, 11, 248–267. [Google Scholar] [CrossRef]
- Sasaki, Y. Three-Dimensional Inversion of Static-Shifted Magnetotelluric Data. Earth Planets Space 2014, 56, 239–248. [Google Scholar] [CrossRef] [Green Version]
- Siripunvaraporn, W. Three-Dimensional Magnetotelluric Inversion: An Introductory Guide for Developers and Users. Surv. Geophys. 2012, 33, 5–27. [Google Scholar] [CrossRef]
- Parker, R.L.; Booker, J.R. Optimal One-Dimensional Inversion and Bounding of Magnetotelluric Apparent Resistivity and Phase Measurements. Phys. Earth Planet. Inter. 1996, 98, 269–282. [Google Scholar] [CrossRef]
- Siripunvaraporn, W.; Uyeshima, M.; Egbert, G. Three-Dimensional Inversion for Network-Magnetotelluric Data. Earth, Planets Sp. 2004, 56, 893–902. [Google Scholar] [CrossRef]
- Egbert, G.D.; Kelbert, A. Computational Recipes for Electromagnetic Inverse Problems. Geophys. J. Int. 2012, 189, 251–267. [Google Scholar] [CrossRef] [Green Version]
- Padilha, A.L. Behaviour of Magnetotelluric Source Fields within the Equatorial Zone. Earth Planets Space 1999, 51, 1119–1125. [Google Scholar] [CrossRef] [Green Version]
- He, Z.; Hu, W.; Dong, W. Petroleum Electromagnetic Prospecting Advances and Case Studies in China. Surv. Geophys. 2010, 31, 207–224. [Google Scholar] [CrossRef] [Green Version]
- Berdichevsky, M.N.; Dmitriev, V.I.; Zhdanov, M.S. Possibilities and Problems of Modern Magnetotellurics. Izv. Phys. Solid Earth 2010, 46, 648–654. [Google Scholar] [CrossRef]
- Kuvshinov, A.V. Deep Electromagnetic Studies from Land, Sea, and Space: Progress Status in the Past 10 Years. Surv. Geophys. 2012, 33, 169–209. [Google Scholar] [CrossRef] [Green Version]
- Mandea, M.; Purucker, M. Observing, Modeling, and Interpreting Magnetic Fields of the Solid Earth. Surv. Geophys. 2005, 26, 415–459. [Google Scholar] [CrossRef]
- Meju, M.A. Geoelectromagnetic Exploration for Natural Resources: Models, Case Studies and Challenges. Surv. Geophys. 2002, 23, 133–206. [Google Scholar] [CrossRef]
- Wang, N.; Qin, Q.; Chen, L.; Zhao, S.; Zhang, C.; Hui, J. Direct Interpretation of Petroleum Reservoirs Using Electromagnetic Radiation Anomalies. J. Pet. Sci. Eng. 2016, 146, 84–95. [Google Scholar] [CrossRef]
- Sheard, S.N.; Ritchie, T.J.; Christopherson, K.R.; Brand, E. Mining, Environmental, Petroleum, and Engineering Industry Applications of Electromagnetic Techniques in Geophysics. Surv. Geophys. 2005, 26, 653–669. [Google Scholar] [CrossRef]
- Qin, Q.M.; Li, B.S.; Cui, R.B.; Jiang, H.B.; Wang, Q.P.; Zhang, Z.X.; Zhang, N. Analysis of Factors Affecting Natural Source SLF Electromagnetic Exploration at Geothermal Wells. Acta Geophys. Sin. 2010, 53, 685–694. [Google Scholar] [CrossRef]
- Wang, N.; Qin, Q.; Chen, L.; Bai, Y.; Zhao, S.; Zhang, C. Dynamic Monitoring of Coalbed Methane Reservoirs Using Super-Low Frequency Electro-Magnetic Prospecting. Int. J. Coal Geol. 2014, 127, 24–41. [Google Scholar] [CrossRef]
- Börner, R.U. Numerical Modelling in Geo-Electromagnetics: Advances and Challenges. Surv. Geophys. 2010, 31, 225–245. [Google Scholar] [CrossRef]
- Chave, A.D.; Jones, A.G. The Magnetotelluric Method: Theory and Practice; Cambridge University Press: Cambridge, UK, 2012; pp. 1–584. [Google Scholar] [CrossRef] [Green Version]
- Wannamaker, P.E. Advances in Three-Dimensional Magnetotelluric Modeling Using Integral Equations. Geophysics 1991, 56, 1716–1728. [Google Scholar] [CrossRef]
- Virieux, J.; Calandra, H.; Plessix, R.É. A Review of the Spectral, Pseudo-Spectral, Finite-Difference and Finite-Element Modelling Techniques for Geophysical Imaging. Geophys. Prospect. 2011, 59, 794–813. [Google Scholar] [CrossRef]
- Siripunvaraporn, W.; Egbert, G.; Lenbury, Y. Numerical Accuracy of Magnetotelluric Modeling: A Comparison of Finite Difference AP-Proximations. Earth Planets Space 2002, 54, 721–725. [Google Scholar] [CrossRef] [Green Version]
- Tietze, K.; Ritter, O. Three-Dimensional Magnetotelluric Inversion in Practice-the Electrical Conductivity Structure of the San Andreas Fault in Central California. Geophys. J. Int. 2013, 195, 130–147. [Google Scholar] [CrossRef] [Green Version]
- Rodi, W.; Mackie, R.L. Nonlinear Conjugate Gradients Algorithm for 2-D Magnetotelluric Inversion. Geophysics 2001, 66, 174–187. [Google Scholar] [CrossRef]
- Farquharson, C.G.; Miensopust, M.P. Three-Dimensional Finite-Element Modelling of Magnetotelluric Data with a Divergence Cor-Rection. J. Appl. Geophys. 2011, 75, 699–710. [Google Scholar] [CrossRef]
- Newman, G.A.; Alumbaugh, D.L. Three-Dimensional Magnetotelluric Inversion Using Nonlinear Conjugate Gradients. Geophys. J. Int. 2000, 140, 410–424. [Google Scholar] [CrossRef] [Green Version]
- Ye, X.; Qin, Q.; Li, B.; Zhang, Z.; Zhang, Z. A Study on Using Natural Source Super Low Frequency Electromagnetic Wave to Explore Goaf. Int. Geosci. Remote Sens. Symp. 2008, 2, 1243–1246. [Google Scholar] [CrossRef]
- Chen, L.; Qin, Q.; Wang, N.; Bai, Y.; Zhao, S. Review of the Forward Modeling and Inversion in Magnetotelluric Sounding Field. Acta Sci. Nat. Univ. Pekin 2014, 50, 979–984. [Google Scholar] [CrossRef]
- Chen, L.; Qin, Q.; Bai, Y.; Wang, N.; Wang, J.; Chen, C. Integrating Remote Sensing and Super-Low Frequency Electromagnetic Technology in Explo-Ration of Buried Faults. Int. Geosci. Remote Sens. Symp. 2013, 811–814. [Google Scholar] [CrossRef]
- Qin, Q.; Ye, X.; Li, B.; Cao, B.; Li, J.; Hou, G.; Li, P. SLF Remote Sensing Technique Based Coal Mine Gas Exploration. Int. Geosci. Remote Sens. Symp. 2007, 4712–4714. [Google Scholar] [CrossRef]
- Ledo, J. Erratum: 2-D versus 3-D Magnetotelluric Data Interpretation. Surv. Geophys. 2006, 27, 111–148. [Google Scholar] [CrossRef] [Green Version]
- Telesca, L.; Lovallo, M.; Hsu, H.L.; Chen, C.C. Analysis of Dynamics in Magnetotelluric Data by Using the FisherShannon Method. Phys. A Stat. Mech. Appl. 2011, 390, 1350–1355. [Google Scholar] [CrossRef]
- Bourges, M.; Mari, J.L.; Jeannée, N. A Practical Review of Geostatistical Processing Applied to Geophysical Data: Methods and AP-Plications. Geophys. Prospect. 2012, 60, 400–412. [Google Scholar] [CrossRef]
- Huang, N.E.; Wu, Z. A Review on Hilbert-Huang Transform: Method and Its Applications. Rev. Geophys. 2008, 46, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Su, X.; Lin, X.; Liu, S.; Zhao, M.; Song, Y. Geology of Coalbed Methane Reservoirs in the Southeast Qinshui Basin of China. Int. J. Coal Geol. 2005, 62, 197–210. [Google Scholar] [CrossRef]
- Pan, Z.; Connell, L.D. Modelling Permeability for Coal Reservoirs: A Review of Analytical Models and Testing Data. Int. J. Coal Geol. 2012, 92, 1–44. [Google Scholar] [CrossRef]
- Liu, D.; Yao, Y.; Tang, D.; Tang, S.; Che, Y.; Huang, W. Coal Reservoir Characteristics and Coalbed Methane Resource Assessment in Huainan and Huaibei Coalfields, Southern North China. Int. J. Coal Geol. 2009, 79, 97–112. [Google Scholar] [CrossRef]
- Ramos, A.C.B.; Davis, T.L. 3-D AVO Analysis and Modeling Applied to Fracture Detection in Coalbed Methane Reservoirs. Geophysics 1997, 62, 1683–1695. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, S.; Hui, J.; Qin, Q. Three-Dimensional Audio-Magnetotelluric Sounding in Monitoring Coalbed Methane Reser-Voirs. J. Appl. Geophys. 2017, 138, 198–209. [Google Scholar] [CrossRef]
- Wang, E.; He, X.; Liu, X.; Li, Z.; Wang, C.; Xiao, D. A Non-contact Mine Pressure Evaluation Method by Electromagnetic Radiation. J. Appl. Geophys. 2011, 75, 338–344. [Google Scholar] [CrossRef]
- Frid, V.; Vozoff, K. Electromagnetic Radiation Induced by Mining Rock Failure. Int. J. Coal Geol. 2005, 64, 57–65. [Google Scholar] [CrossRef]
- Wang, E.; Jia, H.; Song, D.; Li, N.; Qian, W. Use of Ultra-Low-Frequency Electromagnetic Emission to Monitor Stress and Failure in Coal Mines. Int. J. Rock Mech. Min. Sci. 2014, 70, 16–25. [Google Scholar] [CrossRef]
- He, X.; Nie, B.; Chen, W.; Wang, E.; Dou, L.; Wang, Y.; Liu, M.; Hani, M. Research Progress on Electromagnetic Radiation in Gas-Containing Coal and Rock Fracture and Its Applications. Saf. Sci. 2012, 50, 728–735. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Well | Coal Seam | Actual Depth/m | SLF Depth Identification/m | Identification Accuracy | ||||
|---|---|---|---|---|---|---|---|---|
| 2007 | 2010 | 2011 | 2012 | Depth Error/m | σ/% | |||
| 1-4 | 15# | 543.8–546.5 | --- | 540–560 | 531–548 | 530–545 | 7.65 | 1.4 |
| 1-5 | 3# | 531.25–536.36 | --- | 510–552 | --- | --- | 2.805 | 0.5 |
| 15# | 618.94–621.84 | --- | --- | 610–630 | 580–595 | 0.39 | 0.1 | |
| 1-8 | 3# | 507.62–512.82 | 501-550 | --- | --- | --- | 15.28 | 3.0 |
| 15# | 597.73–600.23 | --- | --- | 582–602 | 615–630 | 23.52 | 3.9 | |
| 1-12 | 15# | 621.31–626.91 | --- | 555–600 | 618–630 | --- | 10.7 | 2.3 |
| 1-15 | 15# | 627.55–632.74 | --- | 540–590 | 610–637 | --- | 16.6 | 3.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, N.; Qin, Q. Natural Source Electromagnetic Component Exploration of Coalbed Methane Reservoirs. Minerals 2022, 12, 680. https://doi.org/10.3390/min12060680
Wang N, Qin Q. Natural Source Electromagnetic Component Exploration of Coalbed Methane Reservoirs. Minerals. 2022; 12(6):680. https://doi.org/10.3390/min12060680
Chicago/Turabian StyleWang, Nan, and Qiming Qin. 2022. "Natural Source Electromagnetic Component Exploration of Coalbed Methane Reservoirs" Minerals 12, no. 6: 680. https://doi.org/10.3390/min12060680
APA StyleWang, N., & Qin, Q. (2022). Natural Source Electromagnetic Component Exploration of Coalbed Methane Reservoirs. Minerals, 12(6), 680. https://doi.org/10.3390/min12060680