
Cooperative Localization Algorithm for Multiple Mobile Robot System in Indoor Environment Based on Variance Component Estimation


Abstract
:1. Introduction
1.1. Problem Statements
1.2. Contributions
2. Basic Knowledge
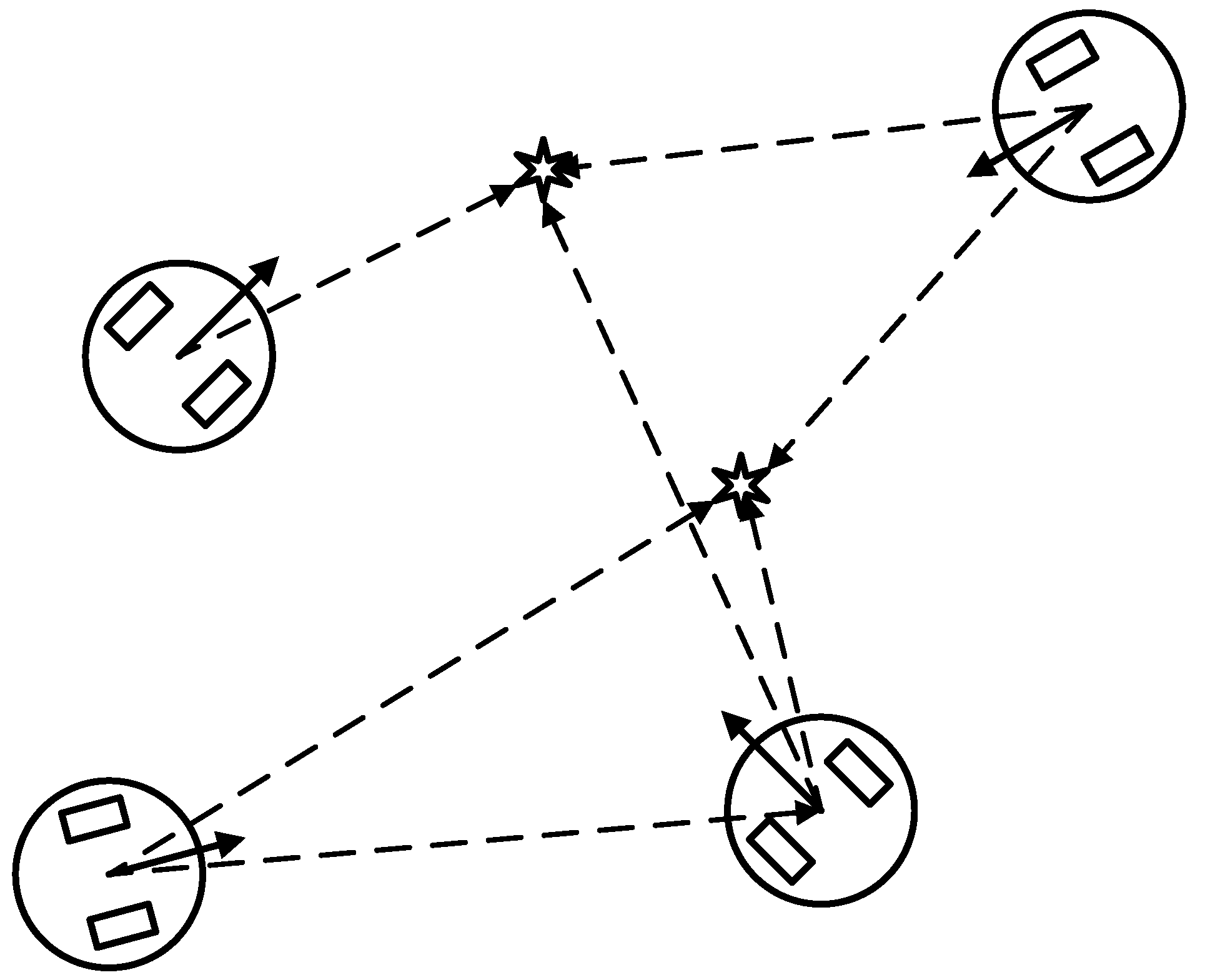
2.1. Nonlinear Model of MMR Cooperative Localization System
2.1.1. State Model
2.1.2. Observation Model
2.2. MMR Cooperative Localization Algorithm Based on CKF
2.2.1. Structure of MMR Cooperative Localization
| Algorithm 1 Cooperative localization of MMR |
|
2.2.2. Cubature Kalman Filter Algorithm
3. Cooperative Localization Algorithm Based on VCKF
3.1. Adaptive Filter Based on the VCE Method
3.2. An MMR Cooperative Localization Algorithm Based on VCKF
4. Experiment and Analysis
4.1. Experiment Setup
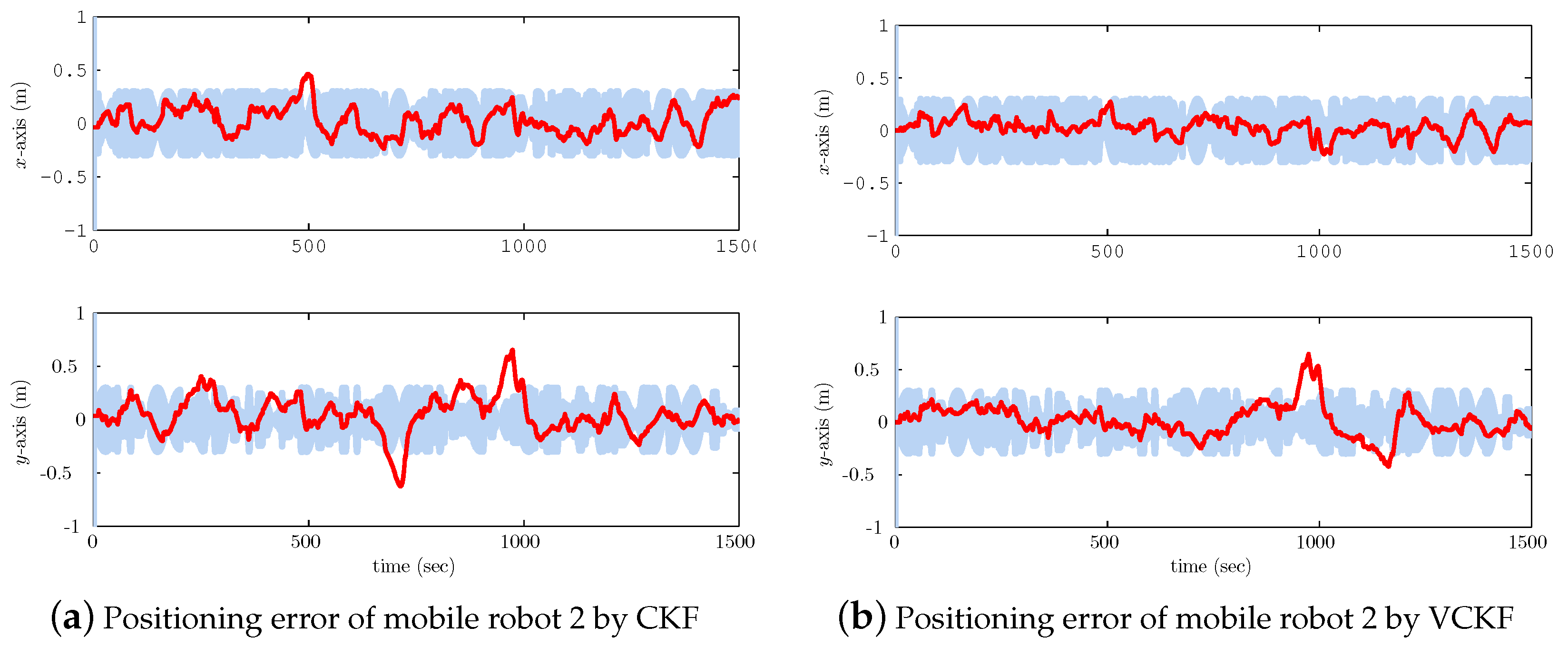
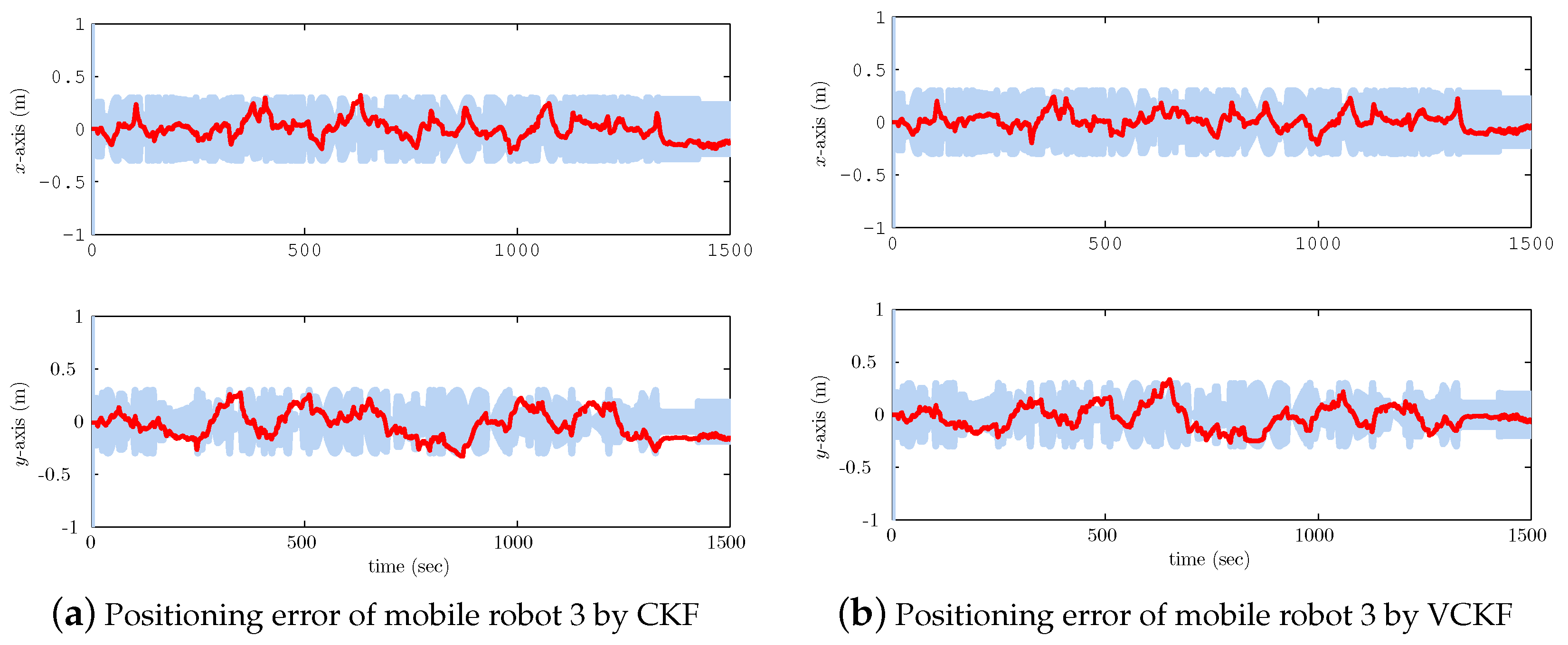
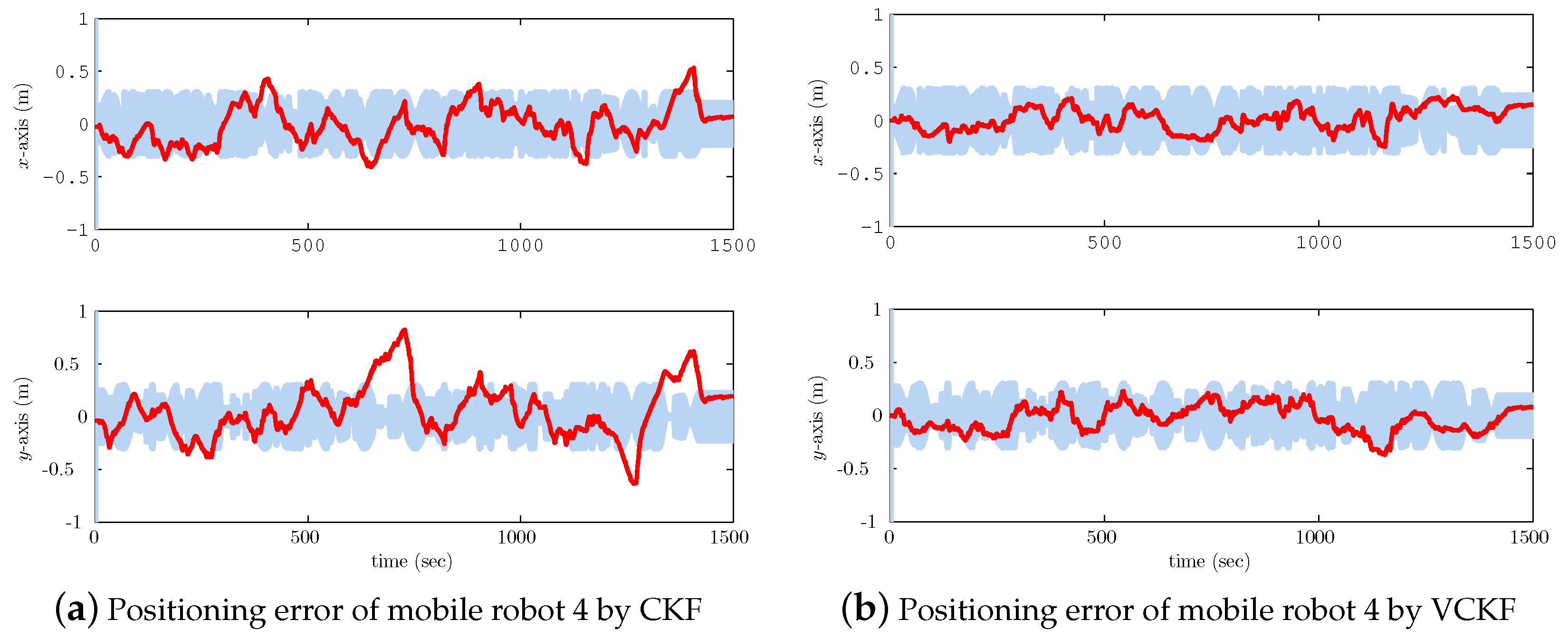
4.2. Cooperative Localization Accuracy Analysis
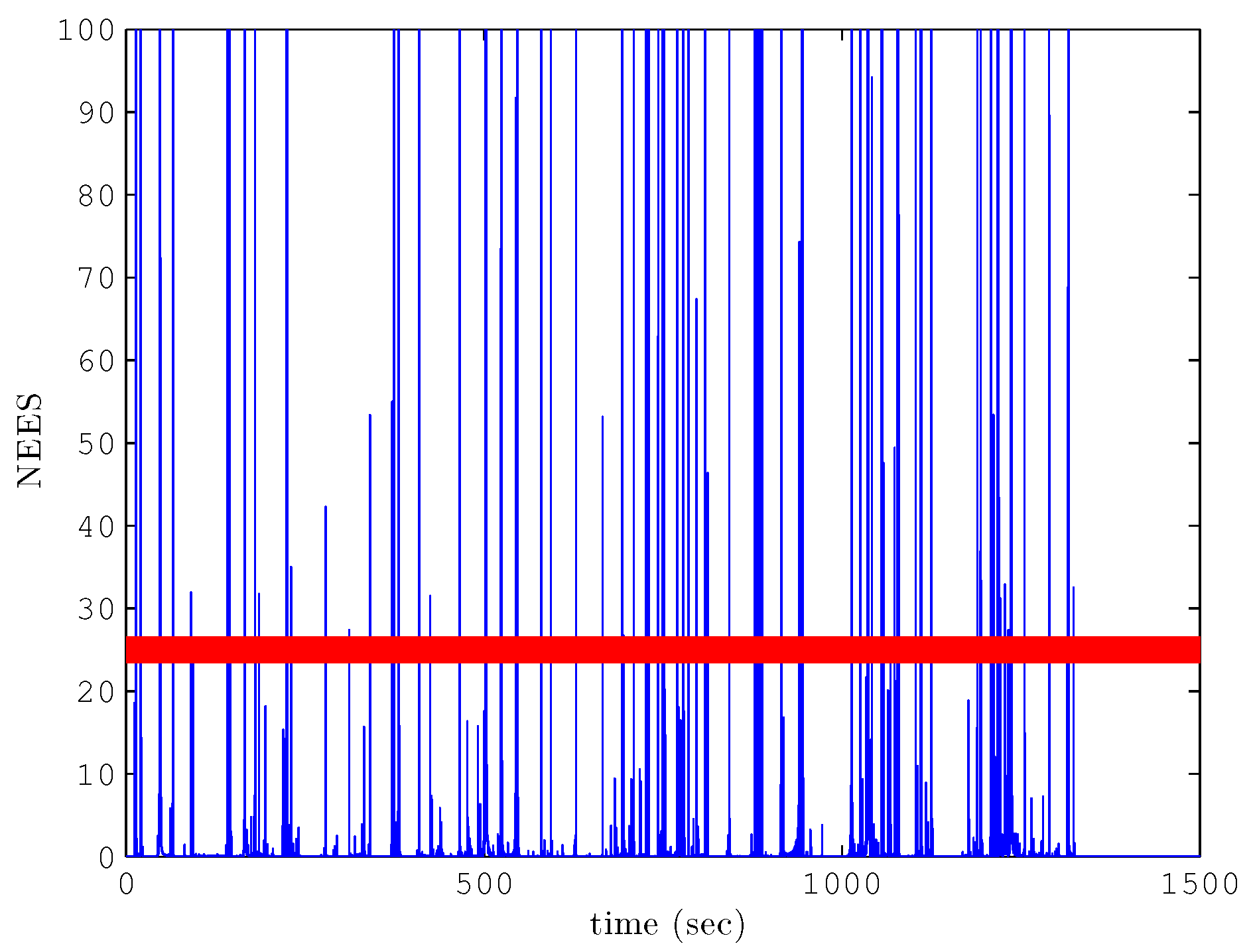
4.3. Algorithm Consistency Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sharma, R.; Quebe, S.; Beard, R.W.; Taylor, C.N. Bearing-only Cooperative Localization. J. Intell. Robot. Syst. 2013, 72, 429–440. [Google Scholar] [CrossRef]
- Wanasinghe, T.R.; Mann, G.K.I.; Gosine, R.G. Distributed Leader-Assistive Localization Method for a Heterogeneous Multirobotic System. IEEE Trans. Autom. Sci. Eng. 2015, 12, 795–809. [Google Scholar] [CrossRef]
- Wanasinghe, T.R.; Mann, G.K.I.; Gosine, R.G. Decentralized Cooperative Localization Approach for Autonomous Multirobot Systems. J. Robot. 2016, 2016, 2560573. [Google Scholar] [CrossRef]
- Leung, K.Y.K.; Barfoot, T.D.; Liu, H.H.T. Decentralized Localization of Sparsely-Communicating Robot Networks: A Centralized-Equivalent Approach. Robot. IEEE Trans. 2010, 26, 62–77. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Kruppa, H.; Thrun, S. A Probabilistic Approach to Collaborative Multi-Robot Localization. Auton. Robot. 2000, 8, 325–344. [Google Scholar] [CrossRef]
- Leonard, J.J.; Teller, S. Robust Range-Only Beacon Localization. Ocean. Eng. IEEE J. 2006, 31, 949–958. [Google Scholar]
- Wanasinghe, T.R.; Mann, G.K.I.; Gosine, R.G. Relative Localization Approach for Combined Aerial and Ground Robotic System. J. Intell. Robot. Syst. 2015, 77, 113–133. [Google Scholar] [CrossRef]
- Michael, N.; Shen, S.; Mohta, K.; Kumar, V.; Nagatani, K.; Okada, Y.; Kiribayashi, S.; Otake, K.; Yoshida, K.; Ohno, K. Collaborative Mapping of an Earthquake Damaged Building via Ground and Aerial Robots. J. Field Robot. 2014, 29, 832–841. [Google Scholar] [CrossRef]
- Roumeliotis, S.I.; Bekey, G.A. Distributed Multirobot Localization. IEEE Trans. Robot. Autom. 2002, 18, 781–795. [Google Scholar] [CrossRef]
- Howard, A.; Parker, L.E.; Sukhatme, G.S. Experiments with a Large Heterogeneous Mobile Robot Team: Exploration, Mapping, Deployment and Detection. Int. J. Robot. Res. 2006, 25, 431–447. [Google Scholar] [CrossRef]
- Li, H.; Nashashibi, F.; Yang, M. Split Covariance Intersection Filter: Theory and Its Application to Vehicle Localization. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1860–1871. [Google Scholar] [CrossRef]
- Wang, Y.; Duan, X.; Tian, D.; Chen, M.; Zhang, X. A DSRC-based Vehicular Positioning Enhancement Using a Distributed Multiple-Model Kalman Filter. IEEE Access 2016, 4, 8338–8350. [Google Scholar] [CrossRef]
- Müller, F.D.P. Survey on Ranging Sensors and Cooperative Techniques for Relative Positioning of Vehicles. Sensors 2017, 17, 271. [Google Scholar] [CrossRef] [PubMed]
- Masehian, E.; Jannati, M.; Hekmatfar, T. Cooperative mapping of unknown environments by multiple heterogeneous mobile robots with limited sensing. Robot. Auton. Syst. 2016, 87, 188–218. [Google Scholar] [CrossRef]
- Howard, A.; Matark, M.J.; Sukhatme, G.S. Localization for Mobile Robot Teams using Maximum Likelihood Estimation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 1, pp. 434–439. [Google Scholar]
- Wu, N.; Li, B.; Wang, H.; Xing, C.; Kuang, J. Distributed Cooperative Localization based on Gaussian Message Passing on Factor Graph in Wireless Networks. Sci. China Inf. Sci. 2015, 58, 1–15. [Google Scholar] [CrossRef]
- Chiang, S.Y.; Wei, C.A.; Chen, C.Y. Real-Time Self-Localization of a Mobile Robot by Vision and Motion System. Int. J. Fuzzy Syst. 2016, 18, 1–9. [Google Scholar] [CrossRef]
- Zhao, S.; Huang, B.; Liu, F. Localization of Indoor Mobile Robot Using Minimum Variance Unbiased FIR Filter. IEEE Trans. Autom. Sci. Eng. 2016, 99, 1–10. [Google Scholar] [CrossRef]
- Shan, J.; Wang, X. Experimental Study on Mobile Robot Navigation using Stereo Vision. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 1958–1965. [Google Scholar]
- Hu, C.; Chen, W.; Chen, Y.; Liu, D. Adaptive Kalman Filtering for Vehicle Navigation. J. Glob. Position. Syst. 2003, 2, 42–47. [Google Scholar] [CrossRef]
- Aghili, F.; Salerno, A. Driftless 3-D Attitude Determination and Positioning of Mobile Robots By Integration of IMU With Two RTK GPSs. IEEE/ASME Trans. Mechatron. 2013, 18, 21–31. [Google Scholar] [CrossRef]
- Yu, F.; Sun, Q.; Lv, C.; Ben, Y.; Fu, Y. A SLAM Algorithm Based on Adaptive Cubature Kalman Filter. Math. Probl. Eng. 2014, 2014, 1–11. [Google Scholar] [CrossRef]
- Sun, J.; Xu, X.; Liu, Y.; Zhang, T.; Li, Y. FOG Random Drift Signal Denoising Based on the Improved AR Model and Modified Sage-Husa Adaptive Kalman Filter. Sensors 2016, 16, 1073. [Google Scholar] [CrossRef] [PubMed]
- Chang, G.; Liu, M. An Adaptive Fading Kalman Filter based on Mahalanobis Distance. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 1114–1123. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S.; Hurd, T.R. Cubature Kalman Filtering for Continuous-Discrete Systems: Theory and Simulations. IEEE Trans. Signal Process. 2010, 58, 4977–4993. [Google Scholar] [CrossRef]
- Wang, J.G. Reliability Analysis in Kalman Filtering. J. Glob. Position. Syst. 2009, 8, 101–111. [Google Scholar] [CrossRef]
- Moghtased-Azar, K.; Tehranchi, R.; Amiri-Simkooei, A.R. An Alternative Method for Non-Negative Estimation of Variance Components. J. Geod. 2014, 88, 427–439. [Google Scholar] [CrossRef]
- Wang, J.G.; Gopaul, N.; Scherzinger, B. Simplified Algorithms of Variance Component Estimation for Static and Kinematic GPS Single Point Positioning. J. Glob. Position. Syst. 2009, 8, 43–52. [Google Scholar] [CrossRef]
- Leung, K.Y.; Halpern, Y.; Barfoot, T.D.; Liu, H.H. The UTIAS Multi-Robot Cooperative Localization and Mapping Dataset. Int. J. Robot. Res. 2011, 30, 969–974. [Google Scholar] [CrossRef]
- Bahr, A.; Walter, M.R.; Leonard, J.J. Consistent Cooperative Localization. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3415–3422. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | CKF | VCKF | ||
|---|---|---|---|---|
| x-Direction | y-Direction | x-Direction | y-Direction | |
| Mobile robot 1 | 0.156 | 0.227 | 0.122 | 0.136 |
| Mobile robot 2 | 0.132 | 0.182 | 0.087 | 0.154 |
| Mobile robot 3 | 0.095 | 0.134 | 0.076 | 0.112 |
| Mobile robot 4 | 0.201 | 0.177 | 0.105 | 0.126 |
| Mobile robot 5 | 0.192 | 0.268 | 0.108 | 0.137 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Q.; Diao, M.; Zhang, Y.; Li, Y. Cooperative Localization Algorithm for Multiple Mobile Robot System in Indoor Environment Based on Variance Component Estimation. Symmetry 2017, 9, 94. https://doi.org/10.3390/sym9060094
Sun Q, Diao M, Zhang Y, Li Y. Cooperative Localization Algorithm for Multiple Mobile Robot System in Indoor Environment Based on Variance Component Estimation. Symmetry. 2017; 9(6):94. https://doi.org/10.3390/sym9060094
Chicago/Turabian StyleSun, Qian, Ming Diao, Ya Zhang, and Yibing Li. 2017. "Cooperative Localization Algorithm for Multiple Mobile Robot System in Indoor Environment Based on Variance Component Estimation" Symmetry 9, no. 6: 94. https://doi.org/10.3390/sym9060094
APA StyleSun, Q., Diao, M., Zhang, Y., & Li, Y. (2017). Cooperative Localization Algorithm for Multiple Mobile Robot System in Indoor Environment Based on Variance Component Estimation. Symmetry, 9(6), 94. https://doi.org/10.3390/sym9060094