




Fluid and Dynamic Analysis of Space–Time Symmetry in the Galloping Phenomenon

Abstract
1. Introduction
2. Relate Works
3. Materials and Methods
3.1. Mathematical Model
3.2. Numerical Modeling
3.2.1. Fourier Transform in Fluid Modeling
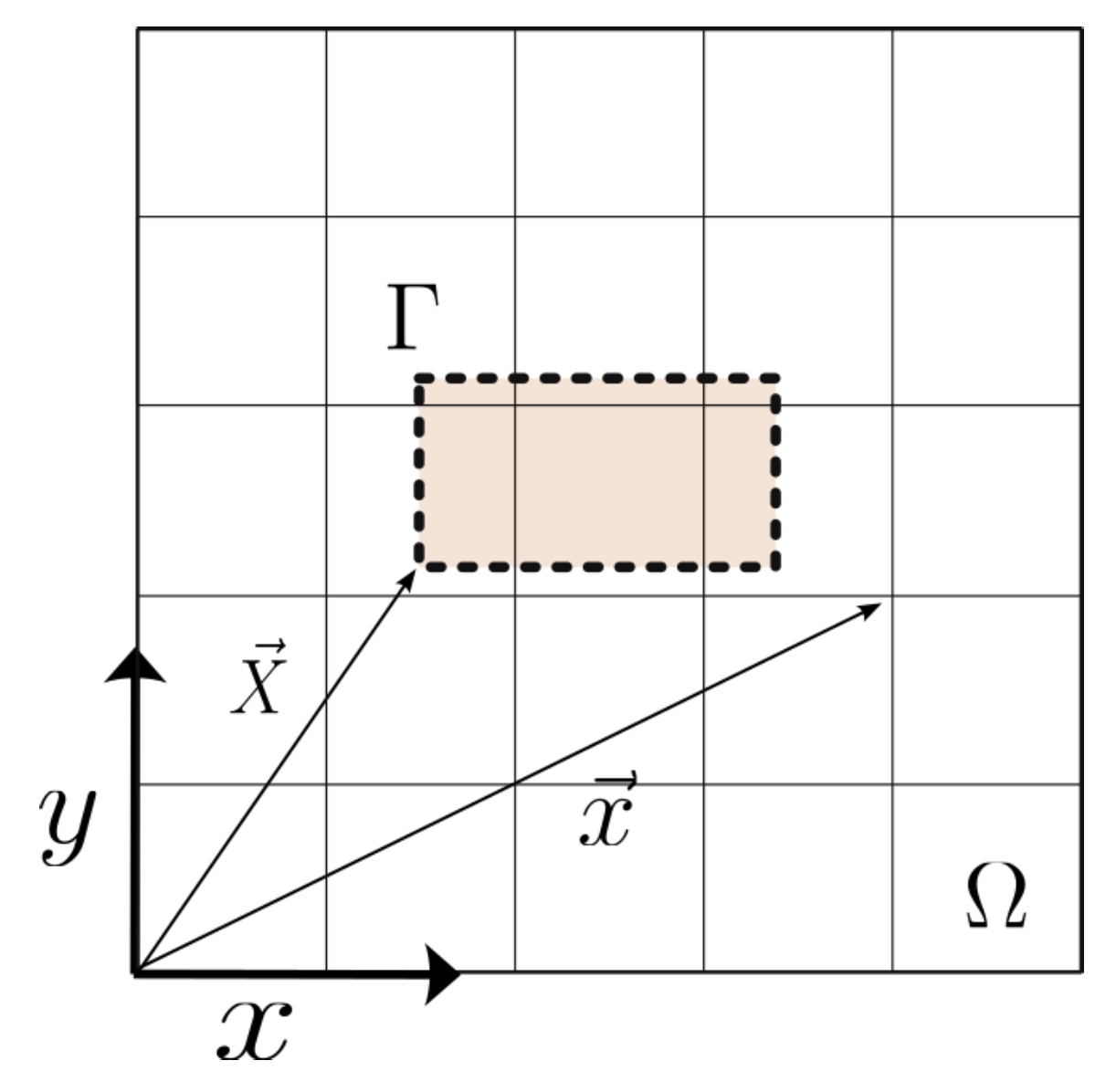
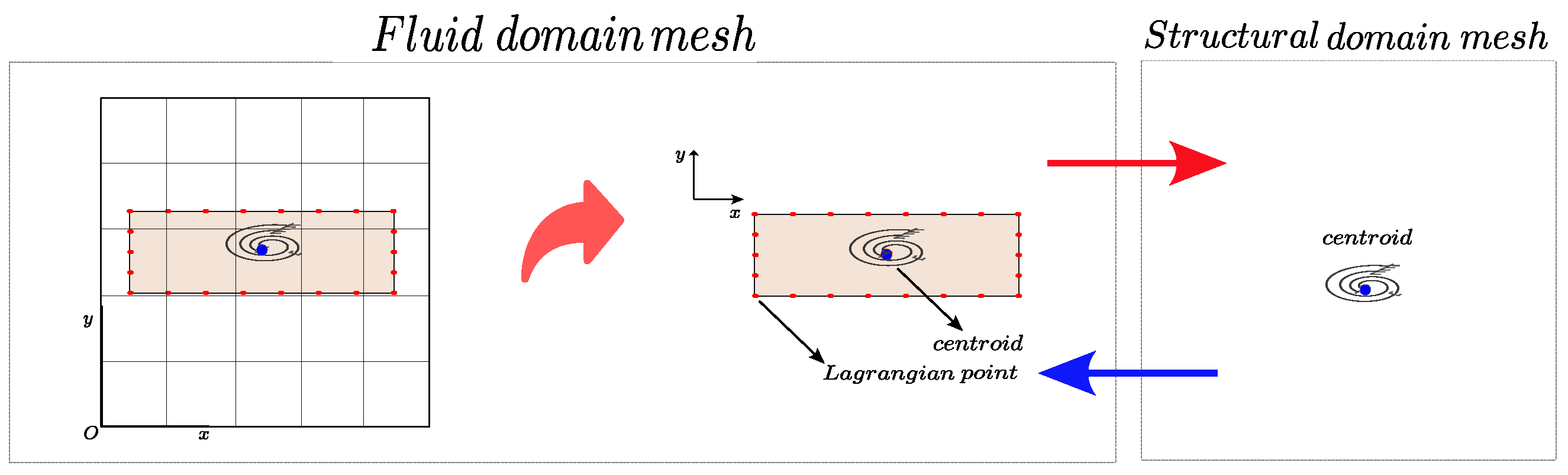
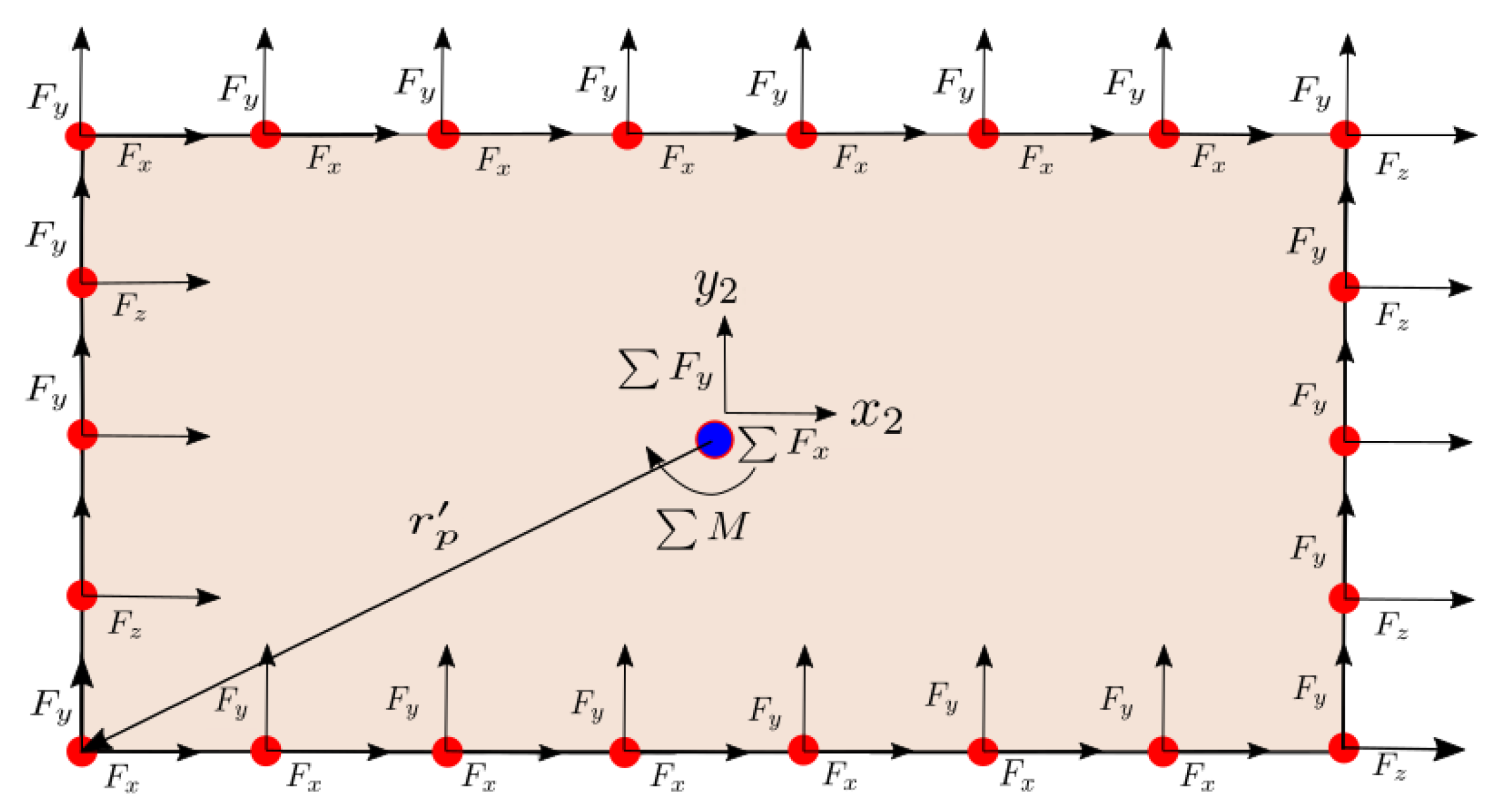
3.2.2. Fluid–Structure Coupling
4. Simulation Results
4.1. Numerical Validation
4.2. Galloping Phenomenon
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nascimento, A.; Mariano, F.; Padilla, E.; Silveira Neto, A. Comparison of the convergence rates between Fourier pseudo-spectral and finite volume method using Taylor-Green vortex problem. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 491. [Google Scholar] [CrossRef]
- Peskin, C. Numerical analysis of blood flow in the heart. J. Comput. Phys. 1977, 25, 220–252. [Google Scholar] [CrossRef]
- Newman, J.N. Marine Hydrodynamics; MIT Press: Cambridge, MA, USA, 1977. [Google Scholar]
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Chakrabarti, S.K. Handbook of Offshore Engineering; Elsevier: Oxford, UK, 2005. [Google Scholar]
- Meriam, J.L.; Kraige, L.G. Engineering Mechanics: Dynamic; Wiley: New York, NY, USA, 1990. [Google Scholar]
- Zhang, G.; Luo, J.; Sun, M.; Yu, Y.; Chen, J.; Wang, J.; Zhang, Z. A novel, reliable parametric model for predicting the nonlinear hysteresis phenomenon of composite magnetorheological fluid. Smart Mater. Struct. 2025, 34, 035060. [Google Scholar] [CrossRef]
- Li, L.; Sherwin, S.; Bearman, P. A moving frame of reference algorithm for fluid/structure interaction of rotating and translating bodies. Int. J. Numer. Methods Fluids 2002, 38, 187–206. [Google Scholar] [CrossRef]
- Robertson, I.; Li, L.; Sherwin, S.; Bearman, P. A numerical study of rotational and transverse galloping rectangular bodies. J. Fluids Struct. 2003, 17, 681–699. [Google Scholar] [CrossRef]
- Yang, J.; Stern, F. A simple and efficient direct forcing immersed boundary framework for fluid–structure interactions. J. Comput. Phys. 2012, 231, 5029–5061. [Google Scholar] [CrossRef]
- Yang, J.; Stern, F. A non-iterative direct forcing immersed boundary method for strongly-coupled fluid–solid interactions. J. Comput. Phys. 2015, 295, 779–804. [Google Scholar] [CrossRef]
- Nomura, T. Finite element analysis of vortex-induced vibrations of bluff cylinders. In Computational Wind Engineering 1; Murakami, S., Ed.; Elsevier: Oxford, UK, 1993; pp. 587–594. [Google Scholar] [CrossRef]
- Cui, Z.; Zhao, M.; Teng, B.; Cheng, L. Two-dimensional numerical study of vortex-induced vibration and galloping of square and rectangular cylinders in steady flow. Ocean Eng. 2015, 106, 189–206. [Google Scholar] [CrossRef]
- Siriyothai, P.; Kittichaikarn, C. Performance enhancement of a galloping-based energy harvester with different groove depths on square bluff body. Renew. Energy 2023, 210, 148–158. [Google Scholar] [CrossRef]
- Hémon, P.; Amandolese, X.; Andrianne, T. Energy harvesting from galloping of prisms: A wind tunnel experiment. J. Fluids Struct. 2017, 70, 390–402. [Google Scholar] [CrossRef]
- Uhlmann, M. An immersed boundary method with direct forcing for the simulation of particulate flows. J. Comput. Phys. 2005, 209, 448–476. [Google Scholar] [CrossRef]
- Tornberg, A.K.; Engquist, B. Numerical approximation of singular source in differential equations. J. Comput. Phys. 2004, 200, 462–488. [Google Scholar] [CrossRef]
- Luo, H.; Dai, H.; Ferreira de Sousa, P.J.; Yin, B. On the numerical oscillation of the direct-forcing immersed-boundary method for moving boundaries. Comput. Fluids 2012, 56, 61–76. [Google Scholar] [CrossRef]
- Kim, J.; Kim, D.; Choi, H. An Immersed-Boundary Finite-Volume Method for Simulations of Flow in Complex Geometries. J. Comput. Phys. 2001, 171, 132–150. [Google Scholar] [CrossRef]
- Takizawa, K.; Tezduyar, T.E. Computational methods for fluid–structure interaction with the space–time formulations. J. Syst. Des. Dyn. 2003, 16, 571–572. [Google Scholar] [CrossRef]
- Dettmer, W.; Perić, D. A computational framework for fluid–rigid body interaction: Finite element formulation and applications. Comput. Methods Appl. Mech. Eng. 2006, 195, 1633–1666. [Google Scholar] [CrossRef]
- Yang, X.; Sotiropoulos, F.; Conzemius, R.J.; Wachtler, J.N.; Strong, M.B. Large-eddy simulation of turbulent flow past wind turbines/farms: The Virtual Wind Simulator (VWiS). Wind Energy 2015, 18, 2025–2045. [Google Scholar] [CrossRef]
- He, T.; Zhou, D.; Han, Z.; Tu, J.; Ma, J. Partitioned subiterative coupling schemes for aeroelasticity using combined interface boundary condition method. Int. J. Comput. Fluid Dyn. 2014, 28, 272–300. [Google Scholar] [CrossRef]
- Kolahdouz, E.M.; Bhalla, A.; Scotten, L.; Craven, B.; Griffith, B. A sharp interface Lagrangian-Eulerian method for rigid-body fluid-structure interaction. J. Comput. Phys. 2021, 443, 110–442. [Google Scholar] [CrossRef]
- Canuto, C.; Hussaini, M.; Quarteroni, A.; Zang, T. Spectral Methods: Fundamentals in Single Domains; Scientific Computation; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Canuto, C.; Hussaini, M.; Quarteroni, A.; Thomas A., J. Spectral Methods in Fluid Dynamics; Scientific Computation; Springer: Berlin/Heidelberg, Germany, 1988. [Google Scholar]
- Canuto, C.; Hussaini, M.; Quarteroni, A.; Zang, T. Spectral Methods: Evolution to Complex Geometries and Applications to Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Briggs, W.; Henson, V. The DFT: An Owners’ Manual for the Discrete Fourier Transform; Other Titles in Applied Mathematics; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1995. [Google Scholar]
- Takahashi, D. A Hybrid MPI/OpenMP Implementation of a Parallel 3-D FFT on SMP Clusters; Springer: Berlin/Heidelberg, Germany, 2006; pp. 970–977. [Google Scholar] [CrossRef]
- Nascimento, A.A.; Mariano, F.P.; Silveria-Neto, A.; Padilla, E.L.M. A comparison of Fourier pseudospectral method and finite volume method used to solve the Burgers equation. J. Braz. Soc. Mech. Sci. Eng. 2014, 36, 737–742. [Google Scholar] [CrossRef]
- Nascimento, A.; Mariano, F.; da Silveira Neto, A.; Padilla, E.L.M. Coupling of the immersed boundary and Fourier pseudo-spectral methods applied to solve fluid–structure interaction problems. J. Braz. Soc. Mech. Sci. Eng. 2024, 46, 213. [Google Scholar] [CrossRef]
- Mariano, F.P.; Moreira, L.d.Q.; Nascimento, A.A.; Silveira-Neto, A. An improved immersed boundary method by coupling of the multi-direct forcing and Fourier pseudo-spectral methods. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 388. [Google Scholar] [CrossRef]
- Mariano, F.P.; Moreira, L.d.Q.; Silveira-Neto, A.d.; da Silva, C.B.; Pereira, J.C. A new incompressible Navier-Stokes solver combining Fourier pseudo-spectral and immersed boundary methods. Comput. Model. Eng. Sci. 2010, 59, 181–216. [Google Scholar] [CrossRef]
- Kinoshita, D.; Martínez Padilla, E.L.; da Silveira Neto, A.; Pamplona Mariano, F.; Serfaty, R. Fourier pseudospectral method for nonperiodical problems: A general immersed boundary method for three types of thermal boundary conditions. Numer. Heat Transf. Part B Fundam. 2016, 70, 537–558. [Google Scholar] [CrossRef]
- Kinoshita, D.; da Silveira Neto, A.; Mariano, F.P.; da Silva, R.A.P.; Serfaty, R. A novel immersed boundary/Fourier pseudospectral method for flows with thermal effects. Numer. Heat Transf. Part B Fundam. 2016, 69, 312–333. [Google Scholar] [CrossRef]
- Albuquerque, L.; Villela, M.; Mariano, F. Numerical Simulation of Flows Using the Fourier Pseudospectral Method and the Immersed Boundary Method. Axioms 2024, 13, 228. [Google Scholar] [CrossRef]
- Villela, M.; Villar, M.; Serfaty, R.; Mariano, F.; Silveira-Neto, A. Mathematical modeling and numerical simulation of two-phase flows using Fourier pseudospectral and front-tracking methods: The proposition of a new method. Appl. Math. Model. 2017, 52, 241–254. [Google Scholar] [CrossRef]
- Monteiro, L.; Mariano, F. Flow Modeling over Airfoils and Vertical Axis Wind Turbines Using Fourier Pseudo-Spectral Method and Coupled Immersed Boundary Method. Axioms 2023, 12, 212. [Google Scholar] [CrossRef]
- Farhat, C.; Lessoinne, M.; Letallec, P. Load and motion transfer algorithms for fluid/structure interaction problems with non-matching discrete interfaces: Momentum and Energy conservation, optimal discretization and application to aeroeslaticity. Comput. Methods Appl. Mech. Eng. 1998, 157, 98–114. [Google Scholar] [CrossRef]
- Lindquist, C. Estudo Numérico e Experimental do Escoamento ao Redor de Cilindros de Base Quadrada e Retangular. Master’s Thesis, Universidade Estadual Paulista, São Paulo, Brazil, 2000. [Google Scholar]
- Nakamura, Y.; Ohya, Y.; Ozono, S.; Nakayama, R. Experimental and numerical analysis of vortex shedding from elongated rectangular cylinders at low Reynolds numbers 200-103. J. Wind Eng. Ind. Aerodyn. 1996, 65, 301–308. [Google Scholar] [CrossRef]
- Okajima, A. Strouhal numbers of rectangular cylinders. J. Fluid Mech. 1982, 123, 379–398. [Google Scholar] [CrossRef]
- Nakamura, Y. Recent research into bluff-body flutter. J. Wind Eng. Ind. Aerodyn. 1990, 33, 1–10. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensionless Groups | ||
|---|---|---|
| Description | Parameter | Dimensionless |
| Time | ||
| Reduced velocity | ||
| Structural damping ratio | ||
| Reduced natural frequency | ||
| Moment of inertia ratio | ||
| Mass ratio | ||
| Moment coefficient | ||
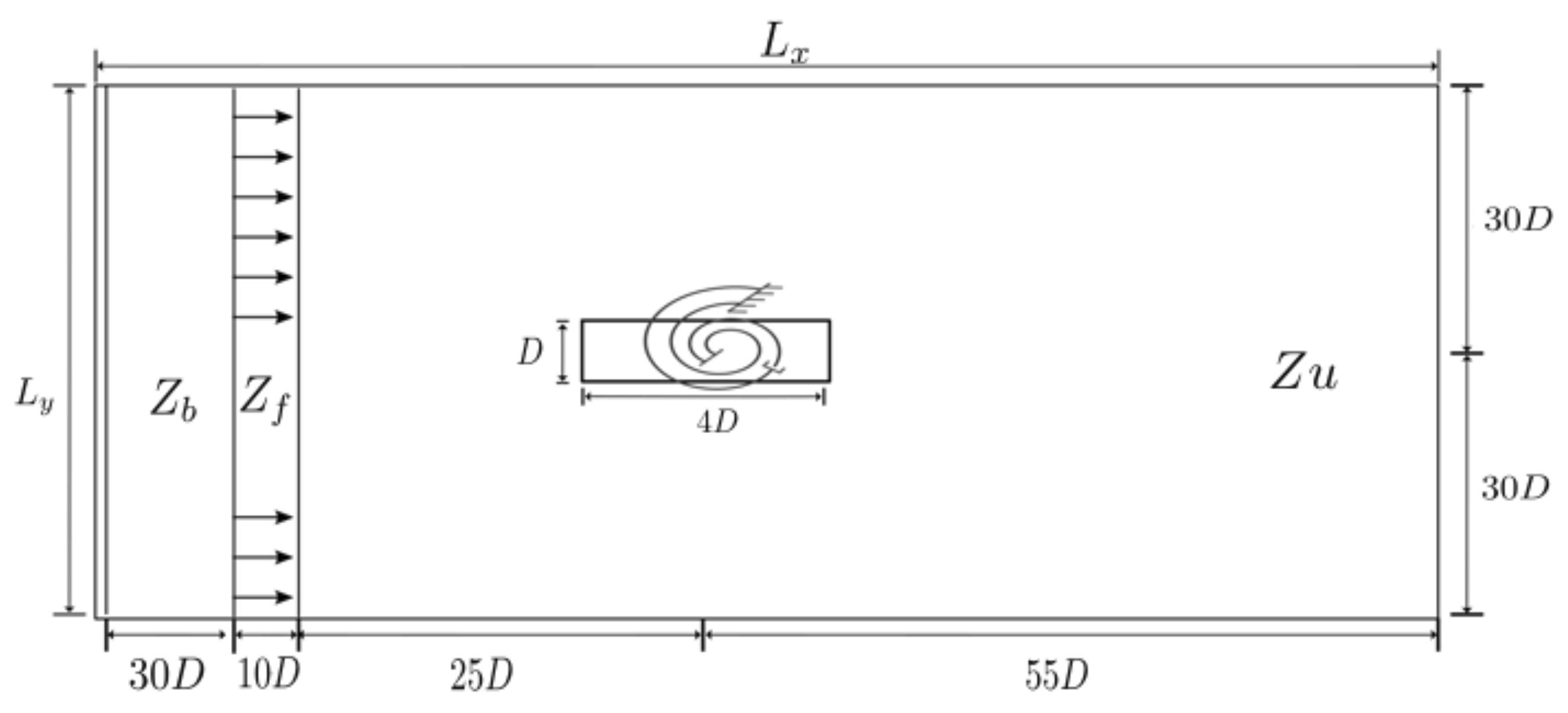
| Description | Symbols | Values |
|---|---|---|
| Rectangle height (cm) | D | 1 |
| Rectangle base (cm) | B | 4 |
| Maximum velocity (cm/s) | 1 | |
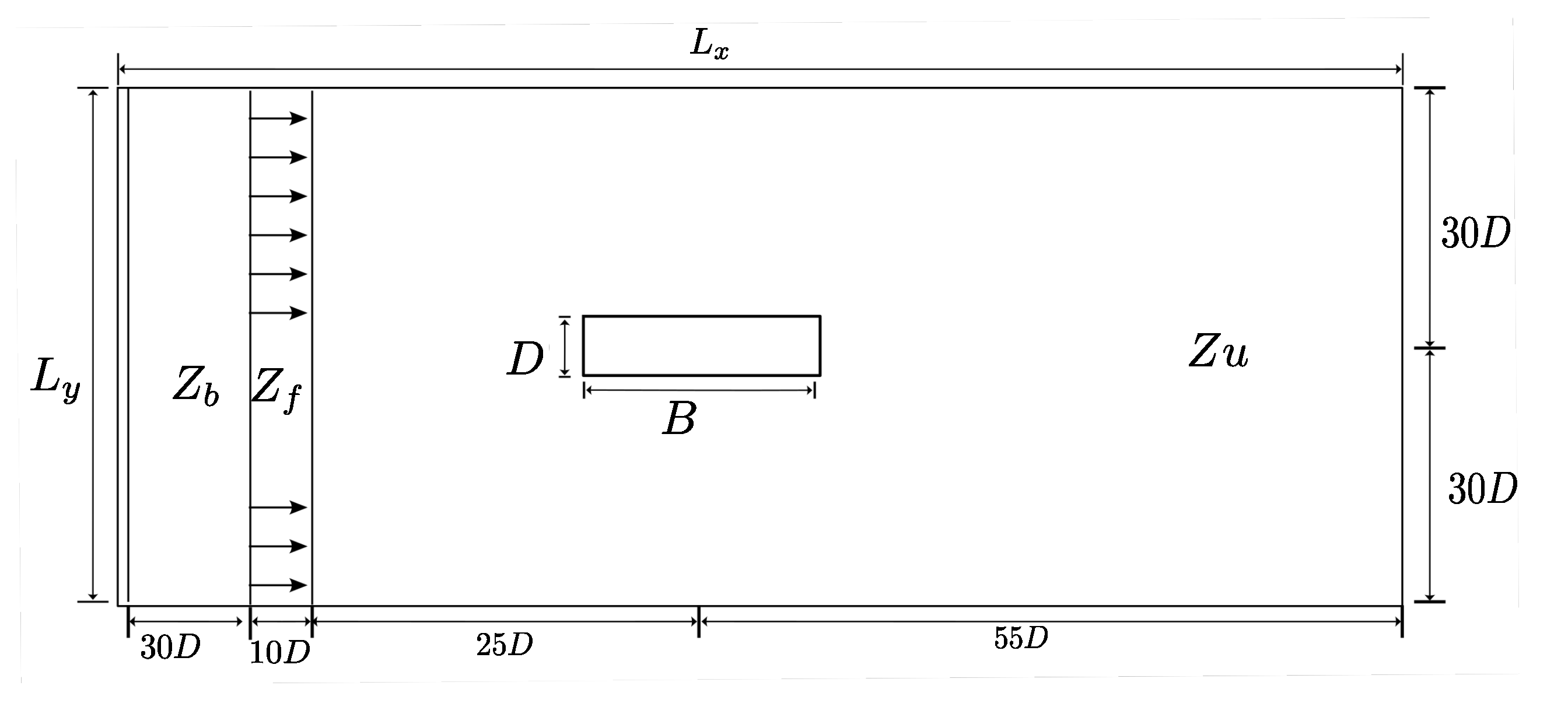
| Domain dimensions | ||
| Density () | 1000 | |
| Courant number | CFL | 0.01 |
| Dimensionless final time | 400 |
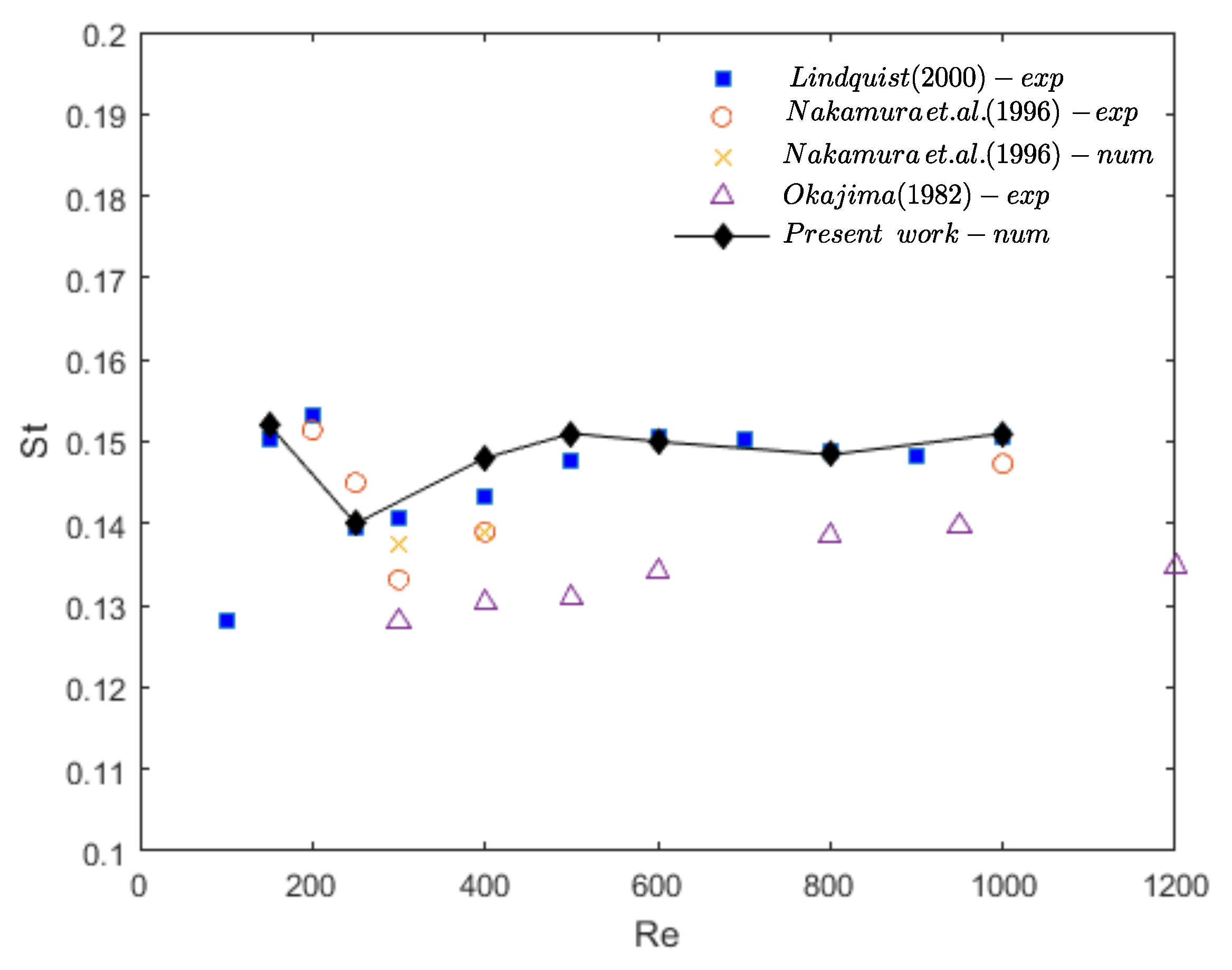
| Reference | Approach | St |
|---|---|---|
| Nakamura et al. [41] | Experimental | 0.145 |
| Lindquist [40] | Experimental | 0.139 |
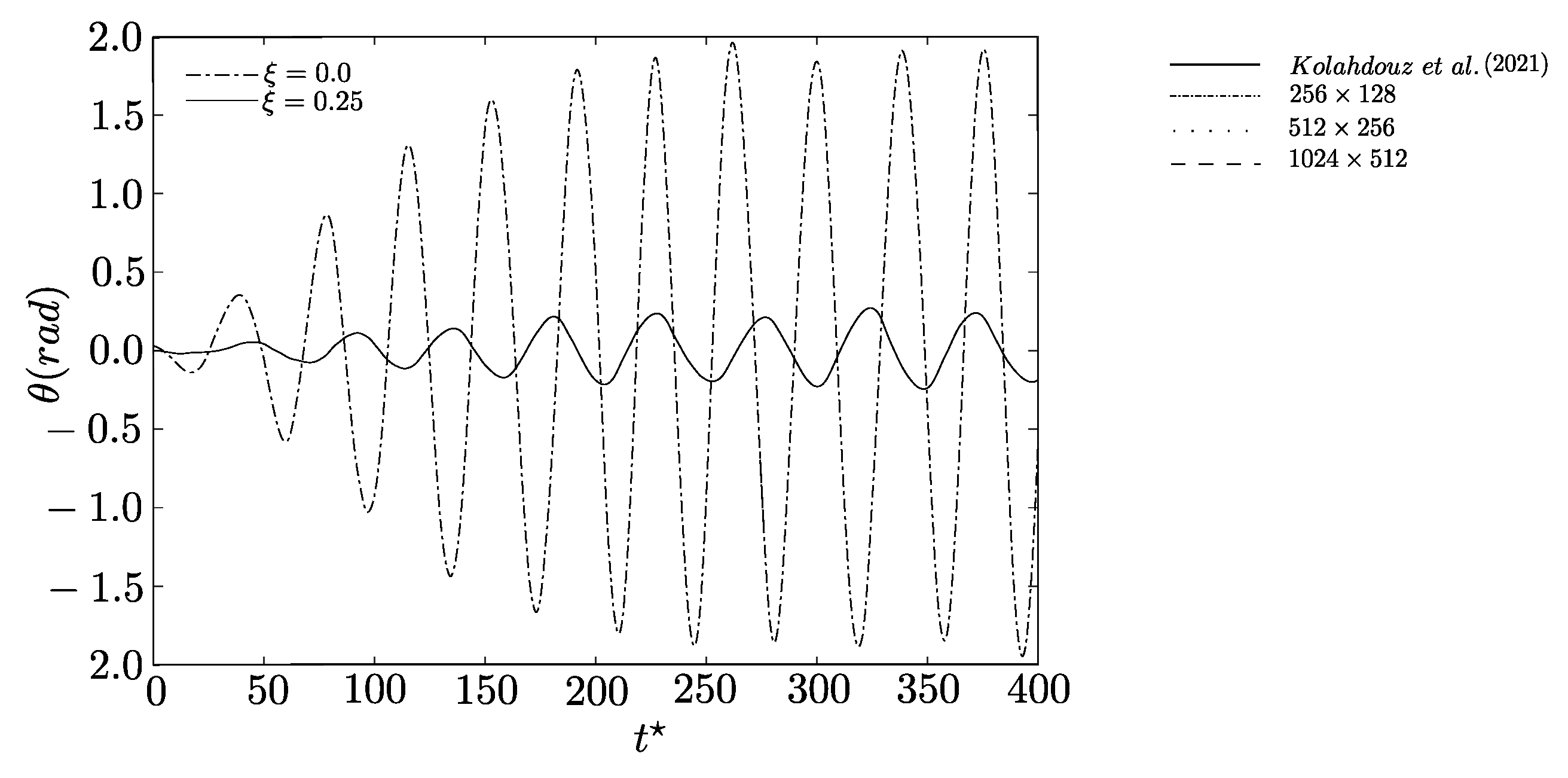
| Present study | Theoretical/256 × 128 | 0.010 |
| Present study | Theoretical/512 × 256 | 0.140 |
| Present study | Theoretical/1024 × 512 | 0.146 |
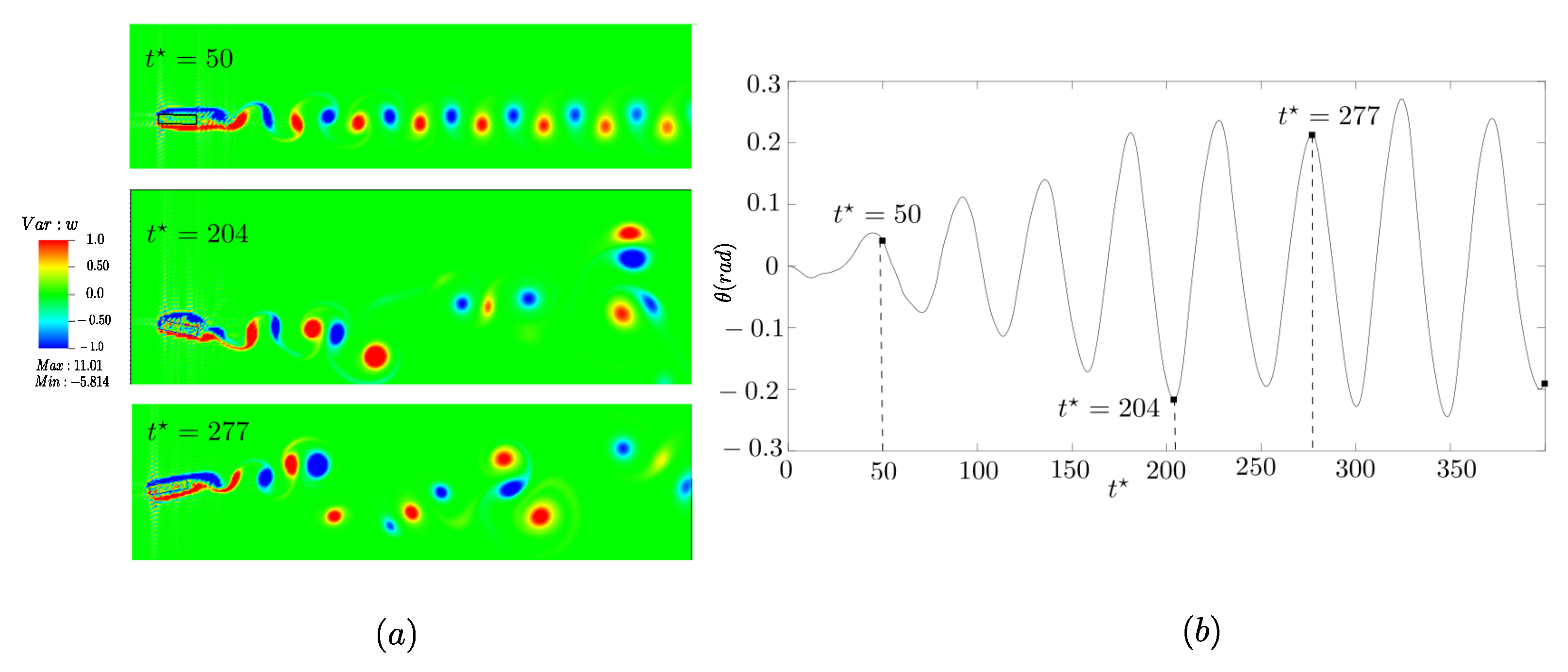
| Reference | (rad) | |
|---|---|---|
| Robertson et al. [9] | 0.262 | 0.762 |
| Dettmer and Perić [21] | 0.267 | 0.800 |
| Yang and Stern [10] | 0.274 | 0.792 |
| He et al. [23] Semi-implicit | 0.310 | 0.805 |
| Yang et al. [22] | 0.281 | 0.788 |
| Kolahdouz et al. [24] | 0.262 | 0.792 |
| Present work: 512 × 256 | 0.240 | 0.736 |
| Present work: 1024 × 512 | 0.272 | 0.800 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santos, J.L.d.S.; Nascimento, A.A.; Borges, A.S. Fluid and Dynamic Analysis of Space–Time Symmetry in the Galloping Phenomenon. Symmetry 2025, 17, 1142. https://doi.org/10.3390/sym17071142
Santos JLdS, Nascimento AA, Borges AS. Fluid and Dynamic Analysis of Space–Time Symmetry in the Galloping Phenomenon. Symmetry. 2025; 17(7):1142. https://doi.org/10.3390/sym17071142
Chicago/Turabian StyleSantos, Jéssica Luana da Silva, Andreia Aoyagui Nascimento, and Adailton Silva Borges. 2025. "Fluid and Dynamic Analysis of Space–Time Symmetry in the Galloping Phenomenon" Symmetry 17, no. 7: 1142. https://doi.org/10.3390/sym17071142
APA StyleSantos, J. L. d. S., Nascimento, A. A., & Borges, A. S. (2025). Fluid and Dynamic Analysis of Space–Time Symmetry in the Galloping Phenomenon. Symmetry, 17(7), 1142. https://doi.org/10.3390/sym17071142