1. Introduction
Topological structures constitute a foundational framework in the analysis and processing of digital images. In particular, locally finite topologies have proven beneficial in the study of digital spaces, where many image processing tasks rely heavily on specific notions of connectedness—most notably, 4-connectedness. Within this context, the M-topology provides a rigorous topological structure for discrete pixel spaces, enabling precise definitions of continuity, connectedness, and neighborhood relations [
1,
2,
3,
4]. Due to its inherent symmetry in local neighborhoods, the M-topology supports more efficient algorithmic computations and typically requires fewer boundary conditions compared to the more complex local structure of the Khalimsky topology [
5]. Originally introduced by Marcus and Wyse in [
6], this topology holds significant relevance in both theoretical and applied digital topology and was first utilized by Rosenfeld in the context of computer vision applications [
7]. Klette [
8] provides a comprehensive review of the use of M-topology in characterizing orthogonal planar grids, thereby clarifying their structural implications in digital image analysis. Beyond grid-based representations, advancements in computational topology have increasingly emphasized homology-based methods. Mrozek et al. [
9] demonstrated the capability of homology algorithms to robustly extract one-dimensional features from noisy multidimensional data, while Assaf et al. [
10] employed persistent homology for effective grayscale image segmentation. Ghrist [
11] introduced barcodes to detect and analyze topological features in high-dimensional datasets. Peltier et al. [
12] and Allili and Ziou [
13] presented algorithmic methods for computing homology groups and extracting topological features across various imaging modalities. More recently, DelMarco [
14] applied computational topology to vision-aided navigation in GPS-denied environments, and Edelsbrunner [
15] provided further evidence of the value of persistent homology in quantifying topological structures in image processing. Collectively, these studies underscore both the utility of M-topology in grid representation and the effectiveness of homology-based approaches—including persistent and combinatorial techniques—for robust feature extraction, segmentation, and topology-aware image analysis. Beyond global topological frameworks, local properties such as adjacency relations play a crucial role in determining proximity and connectedness in digital grids. In [
16], Eckhardt and Latecki established fundamental criteria for connectedness in the digital plane:
- (i)
A subset of is (topologically) connected if it is 4-connected.
- (ii)
A subset of is not (topologically) connected if it is not 8-connected.
These conditions are satisfied by the most widely adopted adjacency relations in computer vision and digital geometry. Topological invariants such as homology, homotopy, and cohomology provide robust tools for distinguishing and analyzing digital spaces [
17,
18,
19]. In particular, relative homology enables the study of structural features of a space in relation to a specified subspace, thereby offering a more nuanced understanding of digital image topology. Arslan, Karaca, and Öztel [
17] introduced a homological framework for
n-dimensional digital images based on digital simplicial homology, extending classical topological methods into the discrete setting. Vergili and Karaca introduced the digital singular homology groups of the digital spaces [
20]; later, they introduced relative homology groups for digital spaces endowed with the Khalimsky topology and investigated key properties such as the additivity and excision axioms within this setting [
5]. Ege, Karaca, and Erden Ege [
21] further explored the behavior of Eilenberg–Steenrod axioms in the context of digital simplicial homology, while a digital singular homology theory for MA-spaces was presented in [
22].
Building upon these foundational contributions in digital topology and homology, this paper focuses on the analysis of features within digital image spaces via relative homology, while employing the M-topology to endow such spaces with a rigorous and meaningful topological structure. The principal objective of the present work is to examine specific topological properties of MA-spaces. In particular, I introduce digital relative homology groups for MA-spaces, demonstrate that the excision property holds in this setting, and establish that the homology functor defines a covariant functor from the category of MA-spaces (MAC) to the category of abelian groups (Ab). A significant structural aspect is that, due to the definition of simplices and the nature of MA-spaces, digital simplices do not exist for . Thus, only 0- and 1-simplices occur in MA-spaces, which fundamentally shapes the homological framework and computational considerations in this setting.
The content of this paper is divided as follows. Some basic notions about the adjacency relations, M-topology, and digital singular homology are given in
Section 2.
Section 3 studies some properties of homology groups of MA-spaces such as the functorial property of digital singular homology on MA-spaces between the categories MAC and Ab.
Section 4 introduces the digital relative homology groups of MA-spaces and studies some properties of digital relative homology groups by using the algebraic topological tools.
Section 5 concludes the paper with a summary and possible further research.
2. Preliminaries
Let
denote the set of integers. For any subset
with a
-adjacency, we call a pair
a
digital image. As established in [
18] (see also [
23]), the
-adjacency relations of
are defined as follows: for a natural number
l with
, two distinct points
are considered
-adjacent (or
κ-adjacent) if the difference
holds for at most
l indices
i, and
for all other indices
i.
Define a subset
for each
as
The topology on
induced by the set
is called the
Marcus–Wyse topology (
M-topology for short) and is denoted by
[
6].
We recall the following definitions from [
24]. For two distinct points
, if
or
, the points
x and
y are said to be
MA-adjacent.
Consider
for a point
, and take
for a space
. If
or
where
, these two points are called
M-adjacent to each other and the set
is called the
MA-neighborhood of p in
X.
We use the notation to represent an M-topological space with an MA-adjacency, and call it an MA-space. Throughout the remainder of this paper, we shall refer to MA-spaces of the form simply as X for notational simplicity.
Let
X and
Y be two MA-spaces. A function
is called an
MA-map at a point if
Moreover, if the map
is an MA-map at every point
, then
f is called an
MA-map.
Remark 1 - 1.
An MA-map preserves the M-connectedness. However, the converse does not hold.
- 2.
The inverse map of a bijective MA-map does not need to be an MA-map.
A bijective, continuous MA-map that has a continuous inverse (which is also an MA-map) is called an
MA-isomorphism [
24].
If there is a path
on
X from
x to
y with
, and
such that
is MA-connected,
, we say
x and
y are
MA-path connected; also, the number
m is called the length of given MA-path. Moreover, if
, the MA-path is referred to as a
closed MA-curve. A simple MA-path in a space
X is defined as a finite sequence
, where two points
and
are M-adjacent if and only if
. A
simple closed MA-curve, also known as an MA-loop, is a simple MA-path of length
l, denoted by
, satisfying
and the adjacency condition
is M-adjacent to
if and only if
. Such a curve is typically denoted by
[
24].
Let
be a digital image and
S be a nonempty subset of
X. The elements
are defined to be
simplices of
[
17] if the following conditions are met:
- (i)
Any distinct two points of S are -adjacent.
- (ii)
whenever for .
A simplex with elements is called an n-simplex.
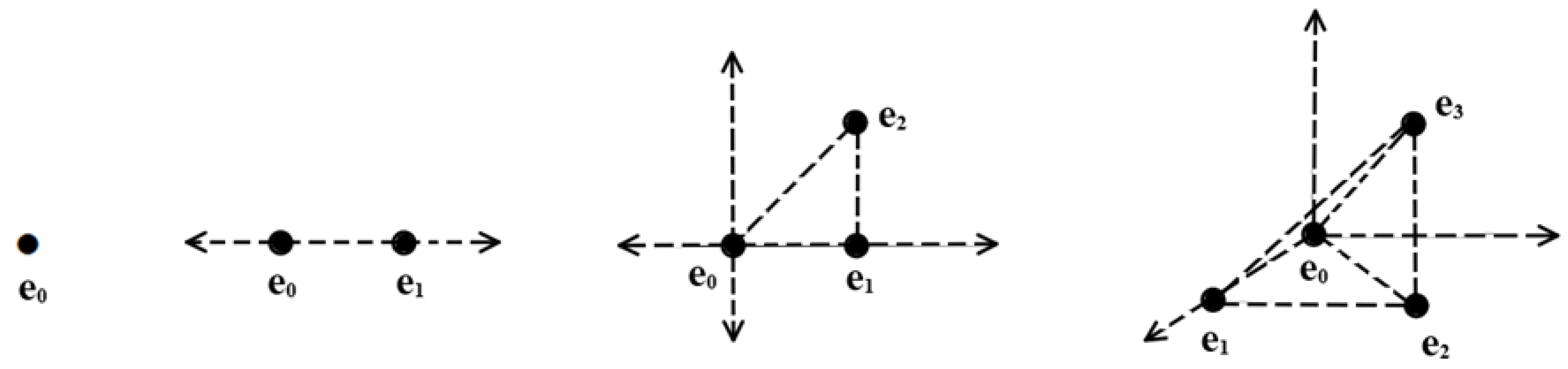
Let
denote the digital standard
n-simplex in
[
20] (see
Figure 1) spanned by some specific points
and
for
where
An orientation of
refers to its vertices that are linearly ordered. The notation
denotes the
ith face vertex
removed with an orientation opposite to the one where the vertices are ordered as presented (i.e.,
). Subsequently, the induced orientation of its faces can be determined by orienting the
ith face according to the arrangement
[
22].
Remark 2 ([
22])
. According to the definition of a simplex and the structure of MA-spaces, n cannot be greater than or equal to 2 when is equipped with the M-topology inherited from . Thus, we only have 0- and 1-simplices in MA-spaces. Definition 1 ([
22])
. An MA-map for X an MA-space is called a digital singular n-simplex in X. is defined to be a free abelian group with a basis consisting of all singular n-simplexes in X for each . The elements of are called digital singular n-chains. Definition 2 ([
22])
. The ith face map for each n and i is defined to be a map that takes the vertices to the vertices by preserving the displayed orderings.Let X be an MA-space. The boundary of a digital singular n-simplex is when . homomorphisms are called boundary operators. Since boundary operators are linear, there exists only one homomorphism for each with for every digital singular n-simplex in X.
Definition 3 ([
22])
. The sequence of free abelian groups and homomorphisms is called a digital singular complex of the MA-space X and it is denoted by . For the proof of the following theorem, see [
25] (Theorem 4.6):
Theorem 1. for all .
Definition 4 ([
22])
. Consider X, an MA-space; the kernel of the boundary operator (represented by ) is called the group of the singular n-cycles, and the image of the boundary operator in X (represented by ) is called the group of the singular n-boundaries. For every MA-space X and , we have since .
Definition 5 ([
22])
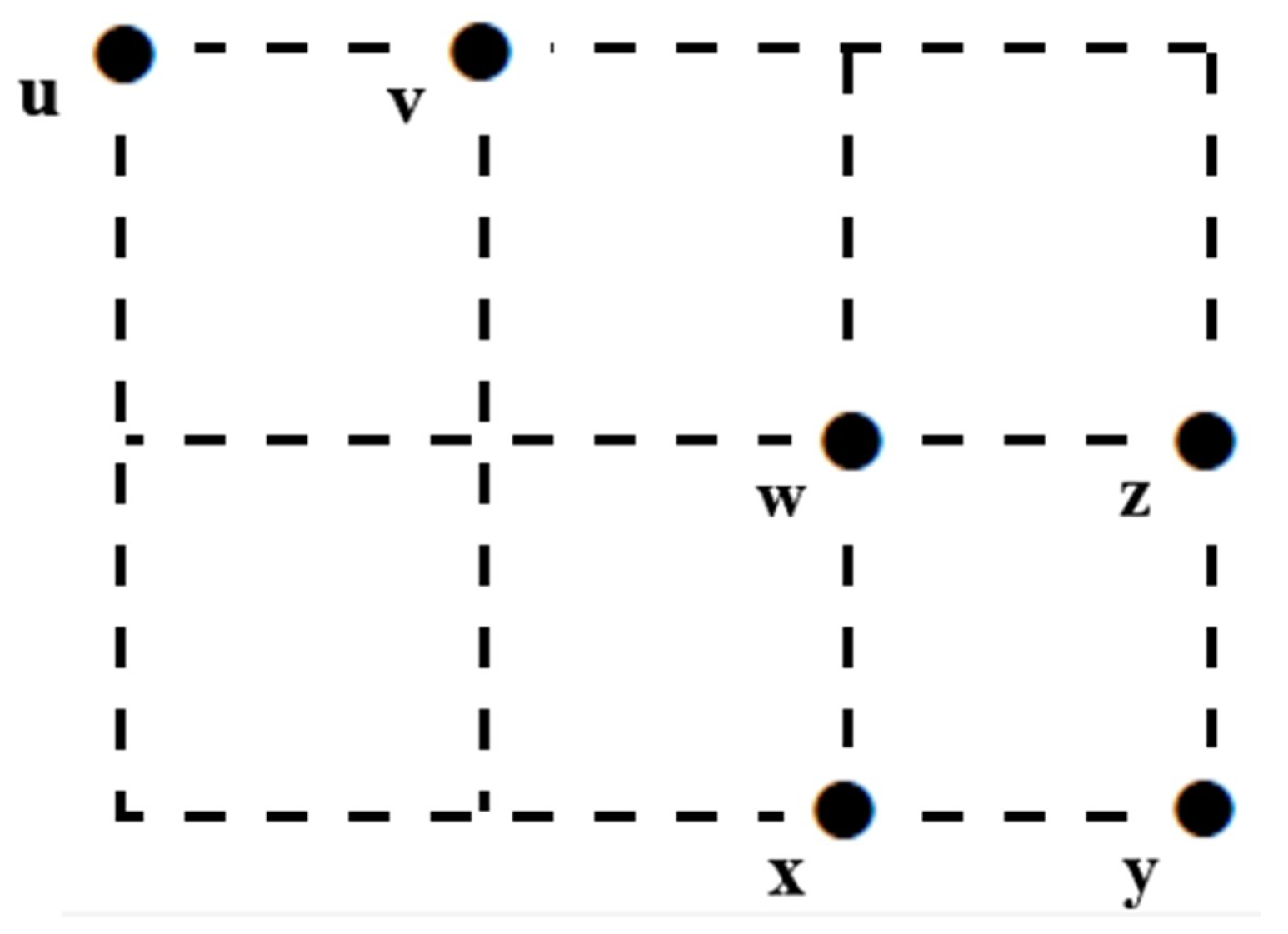
. Let X be an MA-space. The nth singular homology group of X for each isFor , the coset is called the homology class of and is denoted by . Example 1. Let be the MA-space (in Figure 2). We determine the digital homology groups of the MA-space X. The M-topology on X is induced by the basis as follows:
- •
, since is a basis for .
- •
, since has the basis , where - •
for , by Remark 2.
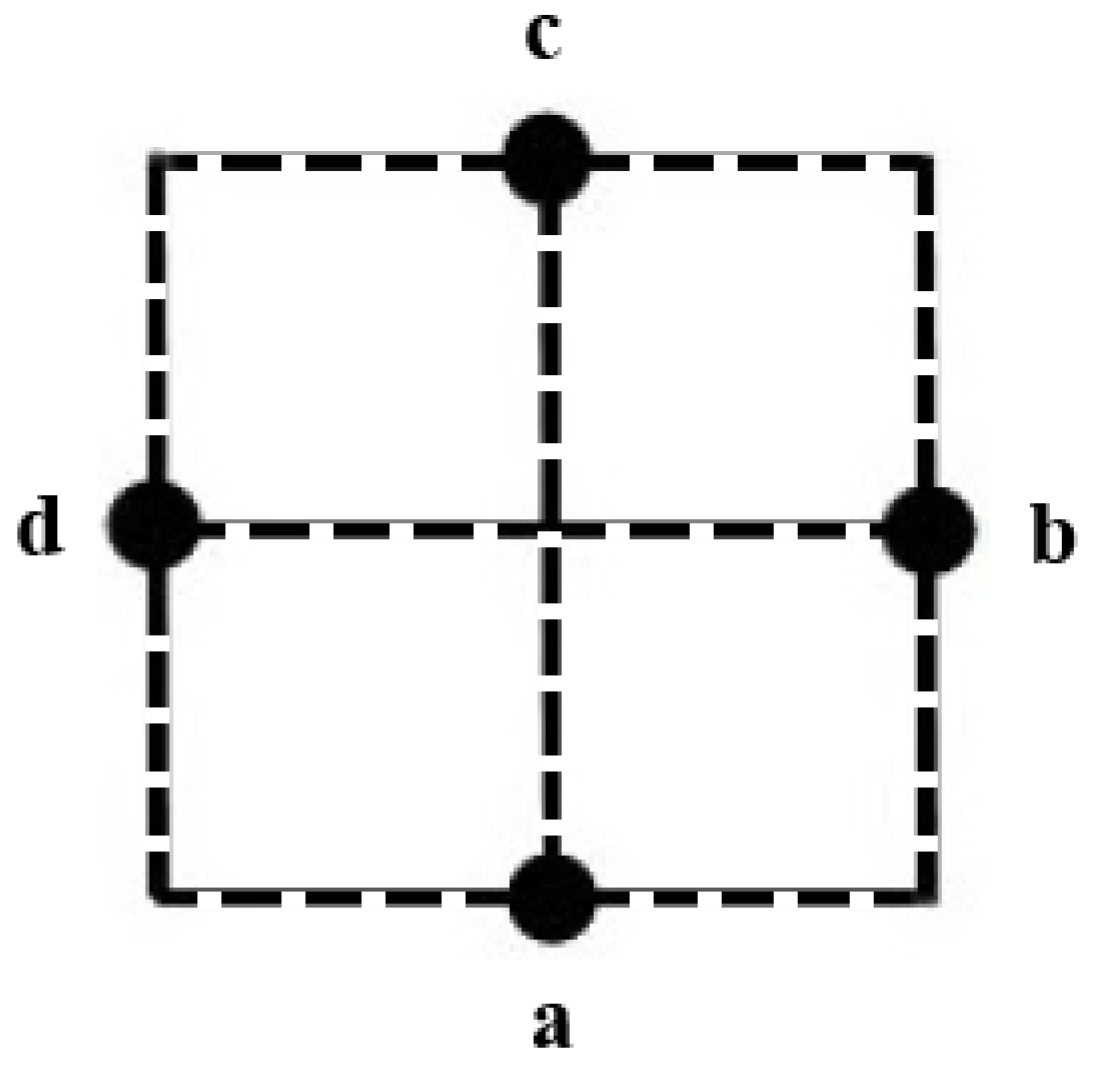
Hence, we have the following digital singular complex:It is obvious from the sequence above that and . Consider the differential map defined byWe haveLet where and . We can write by the linearity of . When we solve the equationwe obtain , so and . Hence, the singular homology groups of the MA-space X are Characterization 1. Consider the MA-space (see Figure 3) consisting of points either all odd or mixed even and double even. Since M-topology on X corresponds to discrete topology, every digital singular n-simplex is continuous only when it is constant. Thus, we have for and for .Consequently , and for . 3. Some Properties of Homology Groups of MA-Spaces
Theorem 2. If X is a one-point MA-space, then we have and for all .
Proof. For each
, there is precisely one digital singular
n-simplex
that is the constant map.
since
.
In the case where n is odd, and hence . is an isomorphism (for even ), which implies . It follows that . If n is positive and even, then becomes an isomorphism. Since , we obtain .
When , since X is a one-point space, . Hence, . Also, ( is odd). Thus, . □
Let X and Y be two MA-spaces. If is an MA-map and is a singular n-simplex in X, then is also a singular n-simplex in Y. If f is extended by the linearity of singular n-simplexes in X, we get a homomorphism
One can easily prove Theorem 3 and Theorem 4 in a very similar way to [
25].
Theorem 3. If is an MA-map where X and Y are two MA-spaces, then .
Theorem 4. Let X and Y be two MA-spaces, and is an MA-map. Then, for every ,
The category of M-topological spaces with MA-adjacency (for short MAC) was considered first by Han [
24] in order to indicate that MAC is equivalent to DTC(4) (Digital Topological Category).
Theorem 5. If X is a path-connected MA-space, then .
Proof. Let
X be a path-connected MA-space. Since MAC is equivalent to DTC(4), which is the category whose objects are digital images with 4-adjacency in
and morphisms are (digitally) 4-continuous maps [
24], one can easily say that
X is a 4-connected digital image and hence
. □
Remark 3. It is well known that is a functor [25]; however, we would like to emphasise here that is the homology functor between the category of MA-spaces (MAC) and the category of abelian groups (Ab) for every where the objects of MAC are MA-spaces and the morphisms are MA-maps. Theorem 6. is a functor for every .
Proof. Let X and Y be two MA-spaces and be an MA-map. Define
where
. Since
is an
n-cycle in
X,
is also an
n-cycle in
Y. By the independence of the choice of representative,
.
is a homomorphism, since for all
Since for every
and
identity MA-map
,
preserves identity.
Let
X,
Y, and
W be MA-spaces and let
and
be two MA-maps. Then,
preserves the combination as follows:
Thus,
is a functor. □
As a consequence of being a functor, we have the following corollary.
Corollary 1. If X and Y are MA-isomorphic, thenfor all . Theorem 7. If X is an MA-space and is the set of path-connected components of X, then for every , Proof. The proof is same as the algebraic topology version. □
4. Relative Homology Groups of MA-Spaces and Excision Theorem
Let
X be an MA-space,
A be a subspace of
X, and
be the inclusion map. One can easily show that the homomorphism induced by
i is a monomorphism. The quotient group
is called the
group of relative n-dimensional chains of
X modulo
A (i.e.,
n-dimensional chain group of the pair
).
There is a homomorphism
, since
and this homomorphism induces
, because the induced homomorphism is a boundary operator.
is called
the group of n-dimensional cycles and
is called
the group of n-dimensional boundaries for every
.
The quotient group
is called
the n-dimensional relative homology groups for the pair .
If we consider
and
as inclusion maps,
i and
j induce the following homomorphisms, respectively:
and
The homomorphism
is called
the connecting homomorphism of the pair
. There exists an exact sequence of groups and homomorphisms that is called
the exact homology sequence of the pair
:
Example 2. Consider the MA-space that is given in Example 1 and as a subset of X. The M-topology on A is .
We should start with determining the homology groups of A.
- •
, since is a basis for .
- •
, since has the basis , where - •
for , by Remark 2.
We have the following digital singular complex:It is evident that and . For , consider the differential map such thatThen,Let where and . We can write by the linearity of . When we solve the equation , we obtain and . Thus, the singular homology groups of the MA-space A are By using the exact sequence for , we writeThe results indicate that , , and . Proposition 1. Let X be an MA-space and . If A is empty set, then for all .
Proof. for all
, since
A is an empty set. By using the exact homology sequence, we have the following short sequence:
Since
is an isomorphism, we obtain the required result. □
Proposition 2. Let X be an MA-space and . If is the singleton set, then for all .
Proof. for all
from Theorem 2. By using the exact homology sequence, we have the following short sequence:
Hence,
, since
is an isomorphism. □
Proposition 3. for all and any MA-space X.
Proof. If we consider the exact homology sequence for the pair , the inclusion map induces the identity homomorphism . Thus, we obtain the required result. □
Let us take
and
as the subsets of an MA-space
X such that
; also, consider the following diagram where each map is an inclusion map:
One can reproduce the Excision Theorem of algebraic topology for appropriate MA-spaces [
25].
Theorem 8. (Excision) Let X be an MA-space; and are subsets of X such that and . Then, the inclusion induces the following isomorphisms for all n: The Excision Theorem in the digital setting plays a key role in extending local homological information to global structures, which is crucial in image analysis. Unlike the classical case, where excision depends on open sets, the digital approach must work within adjacency-based, discrete environments—making this adaptation both nontrivial and practically significant.
Example 3. Consider the MA-space given in Example 1, and take and . For and , the hypothesis of Excision holds; that is, and . By using the Excision Theorem, we have the following isomorphisms for all :Also, by using Proposition 2, we have the following homology groups of the pair : 5. Conclusions
This study established the functoriality of digital singular homology on MA-spaces by formulating a homology functor from the category of MA-spaces (MAC) to the category of abelian groups (Ab). In addition, several foundational properties of homology groups associated with MA-spaces were examined. A significant contribution of this work is the introduction of digital relative homology groups within the context of Marcus–Wyse topology, along with a demonstration that the excision property holds for spaces in the MAC category.
The results presented here aim to support the computation of homology groups on localized regions of digital images, provided the global homological structure is known. This opens pathways for more efficient analysis of complex digital images through modular and topologically informed approaches. While the techniques employed parallel those used in frameworks based on the category of digital topological spaces (DTC) and category of Khalimsky digital topological spaces (KDTC), the results obtained here reflect structural distinctions unique to the Marcus–Wyse topology. One can see that because of its symmetry and minimal neighborhood variation, algorithms that use Marcus–Wyse topology can be faster to compute, with fewer edge conditions than those using Khalimsky’s model.
These findings are especially relevant in applications where high-resolution digital image analysis demands both topological accuracy and computational efficiency—for example, in medical imaging, shape recognition, and 3D object reconstruction. By introducing relative homology structures that remain stable under adjacency relations induced by the Marcus–Wyse topology, this study offers a new algebraic framework that aligns more closely with the inherently discrete nature of digital images than traditional models. As such, the proposed approach not only addresses existing theoretical gaps but also provides a foundation for future developments in topological image analysis.
Future research building upon this work will focus on the development of digital singular cohomology theories for digital spaces endowed with Khalimsky and Marcus–Wyse topologies, and their comparison with corresponding digital simplicial cohomology theory. This comparative study is expected to further clarify the algebraic and topological nuances among digital cohomological frameworks and their suitability for various applications in digital image analysis.


{kind=link}
{kind=link}
{kind=link}