1. Introduction
With the rapid development of artificial intelligence technology, intelligent robots are widely used in various fields, and mobile robots play an important role in industries from medical services, agriculture, and firefighting, etc., to hazardous sites such as military, space, and navigation [
1,
2,
3]. There are various types of mobile robots, such as industrial, flying, agricultural, firefighting, and space robots [
4,
5,
6]; the autonomous movement capability of robots is indispensable. The decision-making and control processes of mobile robots primarily include environment perception, map construction, autonomous localization, and path planning [
7].
Path planning for a robot involves finding an optimal path in its workspace that meets specific optimization criteria [
8]. Common path planning algorithms include the A* algorithm [
9], D* algorithm [
10], ant colony algorithms [
11], genetic algorithm [
12], particle swarm algorithm [
13], gray wolf algorithm [
14,
15], whale algorithm [
16,
17], zebra algorithm [
18], neural network algorithm [
19], etc.; however, these algorithms suffer from many drawbacks in path planning, such as a lack of flexibility; convergence being too fast, leading to local optima; generating paths that are not smooth enough; global optimality-seeking ability being poor, etc. In addition, most of the algorithms’ optimization objectives consider insufficient factors to satisfy the actual work of robots.
In 1952, biophysicists Hodgkin and Huxley introduced a well-known circuit model for the nerve cell membrane and formulated the dynamic equations governing the cell membrane (referred to as the HH model). Building upon the HH model, Grossberg further developed this framework by proposing the Shunting Network Model, which has been successfully applied in various domains, including biological vision, machine vision, sensor technologies, and motion control [
20,
21,
22,
23,
24]. Yang et al. [
25,
26] were pioneers in applying the Shunting Network Model to path planning in mobile robotics, introducing a biologically inspired neural network algorithm that operates without requiring any learning or training phases. This algorithm demonstrates good real-time performance and has seen widespread application. Moorthy [
27] addressed the issue of velocity fluctuations in wheeled mobile robots using a biologically inspired neural dynamics approach. To tackle the traditional dead zone problem associated with the BINN algorithm, Cai [
28] proposed a dead zone escape method within the context of A* path planning. Furthermore, Zhu [
29] developed an enhanced version of the BINN for underwater autonomous navigators operating in marine environments influenced by ocean currents, enabling the computation of collision-free shortest paths. Han [
19] developed a CCPP strategy by integrating a path backtracking algorithm with BINN, which significantly decreases the repetition rate of robot paths. Tang [
30] enhanced BINN by incorporating a template model method and a jump point search algorithm, thereby increasing planning efficiency and minimizing both path length and repetition rate. Xu [
31] further improved BINN by adding an optimal-next-position decision formula that includes a coverage direction term, effectively reducing path turning angles and resulting in smoother paths. Zhu [
32] addressed deadlock issues in path planning by introducing differential links and classical path templates into BINN. Despite these advancements, traditional BINN still faces challenges such as path misjudgment, excessive turns, and suboptimal global paths under certain conditions.
As the use of robots becomes more and more widespread, the environments they face become more and more complex, and there are more and more road factors to be considered. At present, the amount of research on mobile robots in complex road environments is still relatively small; more often than not, only obstacles are considered, and only a small number of scholars have partially considered complex road environments. Chen [
33] proposed a multi-robot search method based on GBNN in unknown environments. Yi [
34] proposed a novel system model based on bio-inspired nerves for electromagnetic interference, water flow, and air flow. Li [
35] proposed a pavement condition model for complex environments such as pavement attachment. Hua [
36] proposed a path planning method considering terrain factors and soil mechanics for complex off-road environments. Feng [
37] proposed a path planning method combining task safety and complex environments.
The theory of reinforcement learning is rooted in psychological and neuroscientific studies of animal behavior, offering normative insights into how agents optimize their control over their environments [
38]. As a robust technical methodology, reinforcement learning has applications beyond image recognition [
39] and demonstrates substantial potential in path planning. Fu [
40] developed an agent capable of navigating a 3D environment using only visual inputs through an end-to-end reinforcement learning approach. By establishing an appropriate reinforcement learning framework along with effective reward mechanisms and constraints, the agent learns efficient navigation strategies through continuous trial and error. To enhance the obstacle avoidance capabilities of drones, Yin [
41] introduced an innovative guided attention method, enabling drones to dynamically switch their decision-making focus between navigation and obstacle avoidance tasks based on changes in the environment. Guo [
42] implemented a distributed deep reinforcement learning (DRL) framework that divides the drone navigation task into two simpler sub-tasks, which are addressed separately using a Long Short-Term Memory (LSTM)-based DRL network.
As artificial intelligence technology has rapidly advanced, the deployment of mobile robots across various sectors has experienced significant growth, leading to increasingly complex and diverse application scenarios. In contemporary intelligent manufacturing facilities, mobile robots perform essential tasks such as material handling and equipment inspection. These factory environments are typically filled with numerous obstacles, including large production machinery and shelving units, and feature narrow passages with intricate layouts. Consequently, mobile robots must possess advanced path planning capabilities to quickly and accurately devise optimal, collision-free routes within these challenging environments, ensuring the efficient and smooth operation of production workflows. However, current path planning algorithms often exhibit limitations, such as inflexibility and a propensity to become trapped in local optima, which hampers their ability to meet the practical needs of industrial operations.
Following natural disasters such as earthquakes and fires, rescue environments become highly hazardous and uncertain. In the aftermath of an earthquake, the ground is strewn with collapsed buildings and debris, resulting in a complex and treacherous terrain. Rescue robots must navigate these areas to locate survivors and deliver essential supplies. This requires the robots to effectively sense intricate environmental information and devise travel routes that are both safe and efficient, avoiding hazardous zones and swiftly reaching target locations. However, traditional path planning algorithms often fail to provide dependable solutions for rescue robots in such scenarios due to their inadequate consideration of the complexities inherent in these environments. This limitation may result in delays in rescue efforts and a failure to seize critical opportunities for intervention. Due to the complex and highly challenging environments that mobile robots encounter in practical applications, coupled with the numerous limitations of existing path planning algorithms that fail to adequately address these challenges, it has become especially urgent to conduct research on intelligent path planning for mobile robots operating in complex road environments. This study aims to optimize path planning algorithms to improve the adaptability and efficiency of mobile robots in such settings, thereby providing robust support for their widespread application in various fields.
As robot application scenarios diversify, the considerations for road safety vary across different tasks. This paper presents an optimized approach to intelligent path planning, proposing a novel method for mobile robots based on a Hybrid Symmetric Bio-inspired Neural Network algorithm designed for complex road environments. To address previous models’ limitations in comprehensively considering road environments, we developed a more inclusive road model. Additionally, to overcome the limitation where traditional neurons have identical initial activity values, we linked neuron activity values to the surrounding road environment and current road conditions, assigning unique initial activity values for neurons in different environments. For the algorithmic model, we improved the path-decision model to enhance the local optimization of bio-inspired neural networks and integrated it with a genetic algorithm to strengthen its global optimization capabilities. The main contributions of this paper are as follows:
- (1)
We developed a novel model for complex road environments, considering a comprehensive range of road conditions. These include the surface flatness, adhesion properties, and slope variations. Surface flatness pertains to the extent of road potholes, adhesion properties refer to the wetness levels and types of paving materials, and slope variations indicate changes in road elevation.
- (2)
We utilize the initial activity values of neurons to model complex road environments. To overcome the uniformity of initial activity values in traditional neurons, we propose a novel approach that integrates neuron activity with the surrounding road environment and the vehicle’s own driving conditions. This approach dynamically adjusts neuron activity values by accounting for environmental factors and vehicle-specific conditions, thereby improving the model’s adaptability and flexibility.
- (3)
We developed an innovative neural network path-decision model. In this model, we incorporate the impact of the target point on path decisions by enhancing the connection between local path decisions and the target point. This is achieved by analyzing the angle formed between the next neuron, the current neuron, and the target neuron, thereby reinforcing the model’s focus on the target.
- (4)
We introduced an improved genetic algorithm that enhances path optimization by integrating domain-specific operators. This approach refines the paths following crossover and mutation steps by eliminating redundant segments between repeated path points, thereby reducing computational load and increasing optimization efficiency.
- (5)
We integrated neuron activity values with the path-decision model to serve as the fitness function for the genetic algorithm. By combining the global optimization strength of the genetic algorithm with the local optimization prowess of a bio-inspired neural network, this approach significantly improves the path planning capabilities of mobile robots navigating complex environments.
The rest of the paper is organized as follows:
Section 2 is the environment modeling section, which provides more comprehensive information about the road environment and builds a corresponding road environment model.
Section 3 is the algorithm principle part, this section describes the principles and theoretical model of the bio-inspired neural network (BINN) and GA.
Section 4 is the HSBNN algorithm part of this paper, which describes the improved BINN and GA, and then combines the improved BINN and GA to form the HSBNN algorithm proposed in this paper.
Section 5 is the experimental and analysis part, which focuses on the experimental demonstration of HSBNN and analyses and discusses the data results.
Section 6 is the summary and outlook part, which focuses on summarizing the content of this paper and looks forward to the next step of the research.
2. Environmental Modeling
The intelligent path planning problem for a mobile robot is to search for the shortest path from an initial state to a goal state under specific constraints, which can be expressed by the mathematical Formula (1) as
In Equation (
1),
denotes the goal model and
denotes all feasible paths.
Environmental modeling refers to the mapping of a real environment onto an abstract space, and in this paper, roads are modeled using the raster map method. This rasterizes the map and use the raster to describe the map elements. In order to ensure the safety of robots moving in the real environment, the real map is rasterized as in
Figure 1.
In the rasterized map, it is assumed that the raster maps have the raster numbers in top-to-bottom and left-to-right order. As shown in
Figure 2, in a 5 × 5 raster map, the bottom left raster is the start position and the top right raster is the target position.
The correspondence between the
nth raster and the center coordinate
can be expressed by the mathematical Equations (2) and (3):
In Equations (2) and (3),
and
are the center coordinates of the nth raster. M is the number of rows of the raster, mod is the remainder operation, and fix is the rounding-to-zero operation. To calculate the neighboring raster distance, define the current raster as
and the next raster as
, and judge its position. This can be expressed by Equation (
4):
In the actual operation environment, we need to not only consider the obstacles but also the complex road conditions, such as leveling status, wet and dry status, paving materials, and slope or height status. The pothole condition of the road directly affects the leveling condition of the road, and a potholed road surface will cause the robot to shake when running. The water on the road surface and the paving material determines the adhesion condition of the road, such as dry road, waterlogged road, dirt road, concrete road, asphalt road, grass, desert, etc. Due to the different dry and wet states of the road surface and the different paving materials, the adhesion condition of the mobile robot traveling on the road is also different, and grass, desert, waterlogged, and dirt roads will reduce the adhesion condition between the robot and the ground to varying degrees and reduce the friction. The adhesion condition between the robot and the ground will be differently reduced, reducing the friction and thus causing the robot to slip. The slope of the road affects the height of the road and creates a height difference with the surrounding road, and the change in height also affects the robot’s traveling, resulting in an increase in energy consumption, as well as making the robot’s movement jerky and potentially leading to it tipping over during operation.
In order to better simulate the real environment, we consider a more comprehensive road environment and establish a new complex road environment model with expressions (5)–(8):
In Equations (5)–(8), is the computed value of the current raster and the classification of the pavement; is the computed value of the current raster and the pavement road condition; are the corresponding weight values of the three indicators; and is the complex road environment correction constant. is the complex road environment model of the current raster.
characterizes the effect of various paving materials on the robot’s adhesion, typically taking a value of 0.3. An increase in leads the robot to favor surfaces composed of superior paving materials. quantifies the impact of the road surface roughness and wet–dry conditions on driving stability, carrying the highest weight, with a typical value of 0.4. As increases, the robot is more likely to select smoother road surfaces and detour around areas that are highly uneven, increasing the overall path distance. reflects the influence of slope and elevation differences on energy consumption and the risk of tipping, and is generally set at 0.3. When increases, the robot actively avoids steep slopes, opting instead to navigate around valleys or along longer, gentler slopes.
serves as a correction constant for complex road environments, aimed at adjusting the overall influence of the road environment model. Typically set at 0.01, this value ensures the numerical stability of the complex road environment model . The selection of should consider both the robot’s performance and the complexity of the environment. In situations where the environment is intricate and the robot’s adaptability is limited, can be increased to amplify the model’s influence. Conversely, a decrease in reduces the model’s impact, which may lead to path planning results that favor shorter routes with suboptimal environmental conditions. Conversely, an increase in will place greater emphasis on environmental quality, leading the robot to avoid complex paths. However, if is set too high, it may result in the robot excessively steering clear of complex roads, ultimately increasing path distances or even preventing the planning of a viable route.
3. Algorithmic Principles
This section focuses on the principles of the algorithm used in this paper. Firstly, the basic principles of BINN and the mapping relationships in raster maps are described. Then, the principles of the GA algorithm and its use in path planning are described.
3.1. BINN Algorithm
In the BINN algorithm, the mobile robot navigates a network space composed of neurons. This network can be viewed as a topological state space that represents the space in which the robot moves. The position of the target point affects the neurons in the network by passing activity values, thus forming a neuronal activity field with different activities. The robot moves to the target location according to specific rules. In the initial stage, the activity value of all neurons is 0. As the position of the target point is affected, the activity value of the neurons changes. The change in neuron activity values in the neural network is modeled as Equations (9)–(12):
In Equations (9)–(12), is the activity value of the ith neuron; is the activity value of the jth neuron in the neighborhood; A, B, and D are the normals representing the decay rate of the activity value, the upper bound of the neuron, and the lower bound of the neuron, respectively; k is the number of neurons in the neighborhood; is the Euclidean distance between the vectors and on the state space; is the weight value of the connection between neuron i and neuron j; and r are the normals; and is the external stimulus signal received by the neuron i. > 0 is an excitation signal, while < 0 is an inhibitory signal; and E is the normal and is much larger than B.
In the neural network topology, the neurons and the grids in the raster map correspond to each other, and neighboring neurons are connected to each other, as shown in
Figure 3.
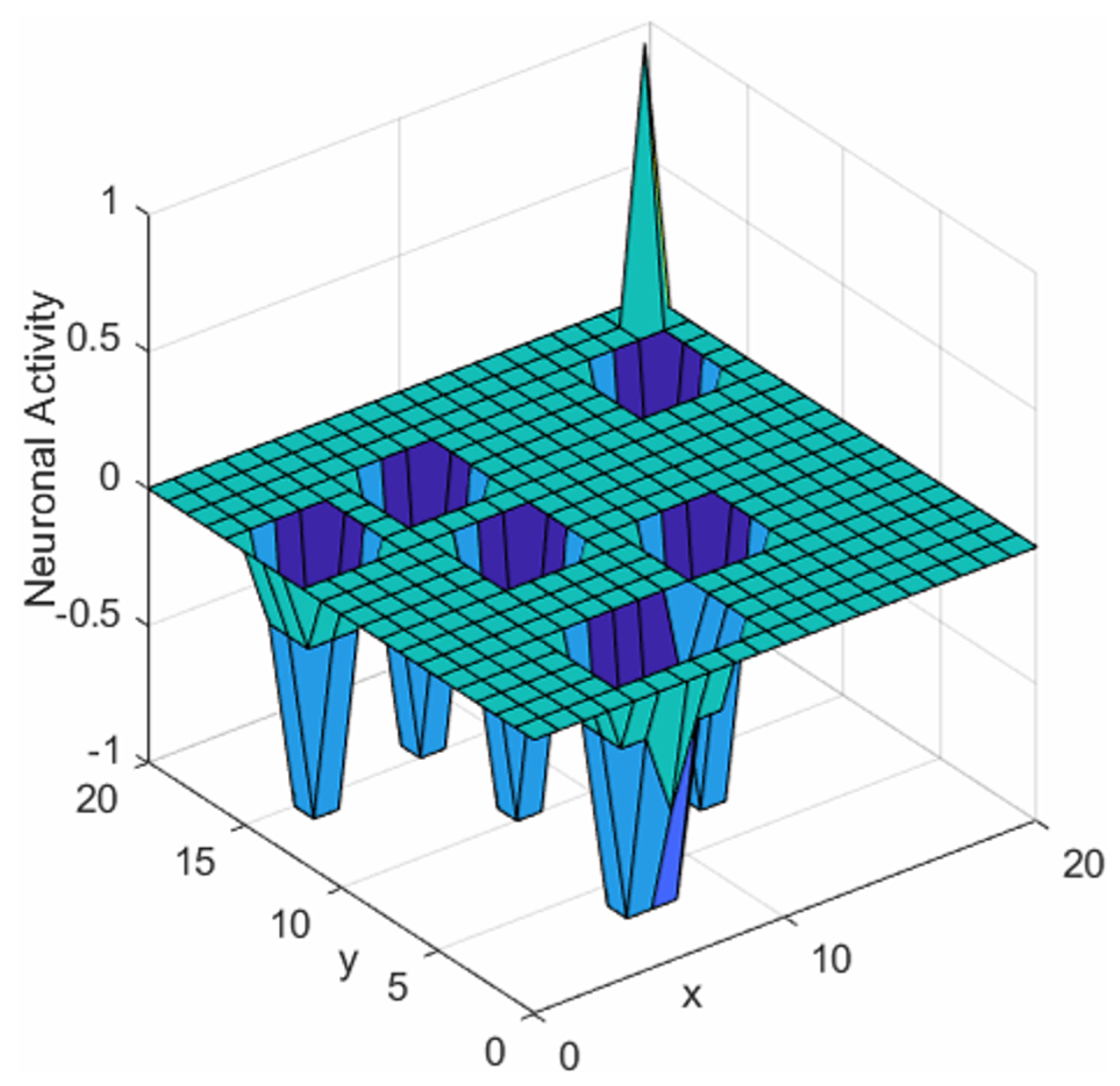
The BINN algorithm regulates neuron activity such that the values for target points reach their peak while those for obstacles drop to their trough, as shown in
Figure 4.
3.2. Genetic Algorithm
In the 1970s, John Holland [
43], in the United States, proposed the GA, which was inspired by the evolutionary process of organisms in nature. The key to the GA is to simulate the process of natural selection to find the optimal solution to a problem. In the GA, all possible solutions to a problem form a population and each solution is called an individual.
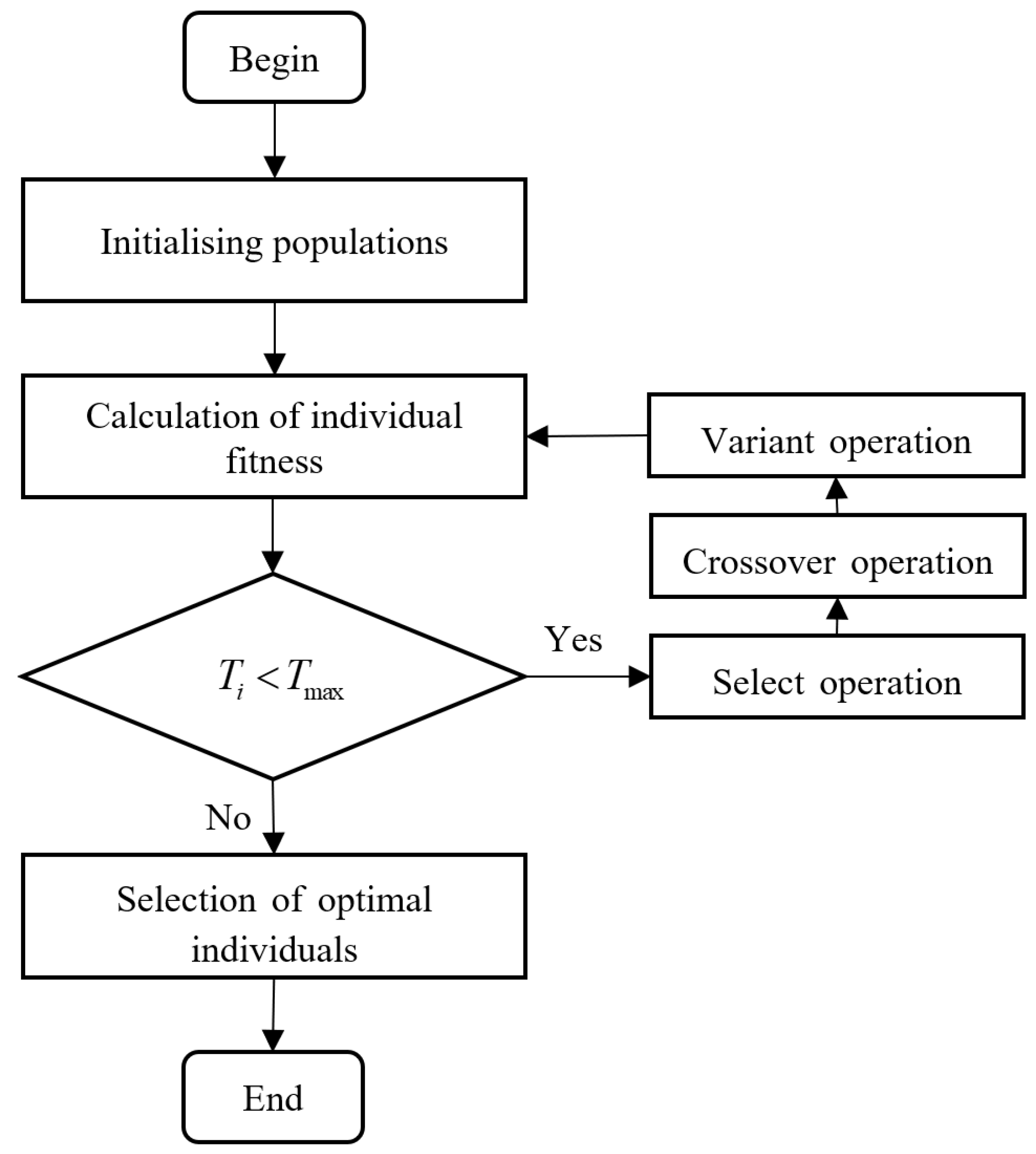
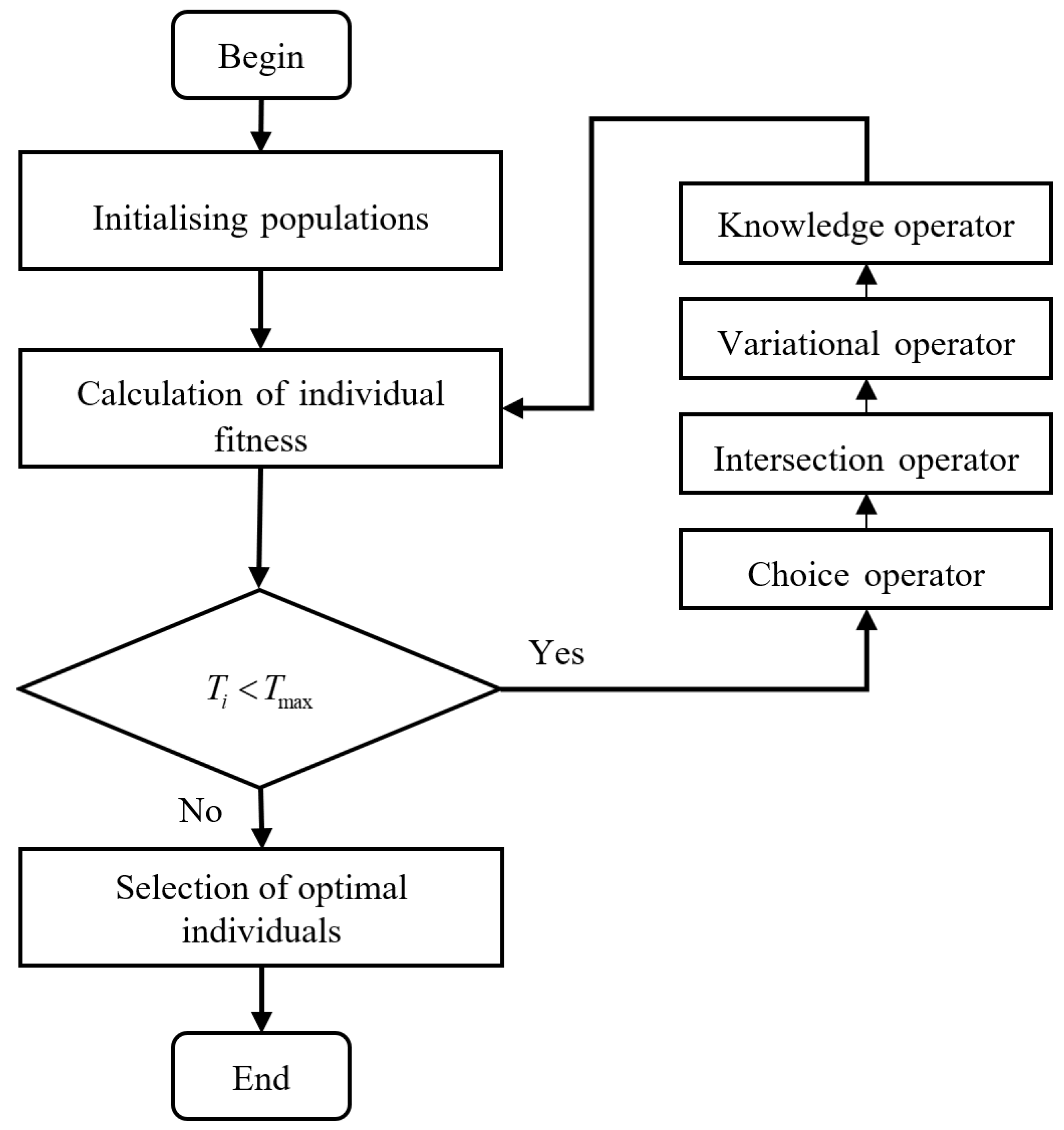
The traditional genetic algorithm consists of operations such as initializing the population, calculating individual fitness values, selection, crossover, and mutation, as shown in
Figure 5.
The ultimate goal of robot path planning is to obtain a collision-free shortest path. The path is usually composed of multiple nodes, including the robot start point, destination point, and intermediate nodes, and connecting these nodes is the solved path. The main steps of the GA to solve finding the path are as follows:
Step 1: Initialize the population. Initializing the population involves randomly generating a number of individuals that satisfy the conditions, and each individual in the population is referred to as a chromosome. Multiple initial paths from the start point to the destination point are randomly generated based on the modeling characteristics.
Step 2: Fitness function. The fitness function, also known as the objective function, is a description of the relationship between individuals and fitness, which is a concept used by genetic algorithms to evaluate the optimal value that the population can achieve in the process of evolution. By determining the size of the fitness, the excellent individuals in the population that meet the requirements can be better retained, usually with the shortest path as the goal. The setting of the fitness function is crucial to the entire solution process, which determines the nature of the paths that are eventually solved.
Step 3: Selection operation. Selection is the operation of picking the offspring individuals in the population, through which the individuals with higher fitness in the population are retained and used to perform the crossover operation later. The purpose of this process is to select and retain paths from the population that are more compatible with the solution requirements.
Step 4: Crossover operation. Crossover is an operation that generates a new individual by replacing and recombining parts of the structures of two parent individuals by recombining the genes of two chromosomes to produce a new chromosome that maximizes the inheritance of good traits from the parent chromosome to the next generation of chromosomes.
Step 5: Mutation operation. Mutation is an operation that varies certain gene values of individuals in a population, changing the genes on chromosomes by means of random selection to give the genetic algorithm a local random search capability.
4. The HSBNN Algorithm in This Paper
Aiming at the intelligent path planning problem of mobile robots in complex environments, this paper combines improved BINN and IGA, and proposes an intelligent path planning method based on the HSBNN algorithm for mobile robots in complex road environments. The method mainly uses the activity values of neurons to represent the complex road environment, then establishes a new path-decision model to strengthen the connection between the local path decision and the target point, and finally uses the BINN as the adaptability function of the GA, and uses the IGA to perform the global path planning to achieve intelligent path planning for mobile robots in a complex road environment.
4.1. Genetic Algorithm
In order to solve the problem of traditional neurons having the same activity value at the beginning, this paper relates the magnitude of the neuron’s activity value to the road environment through a mathematical model. The activity value of neuron
i in a complex road environment can be expressed by Equation (
13):
Neuron
i in a complex road environment receives an external stimulus signal that can be expressed by Equation (
14):
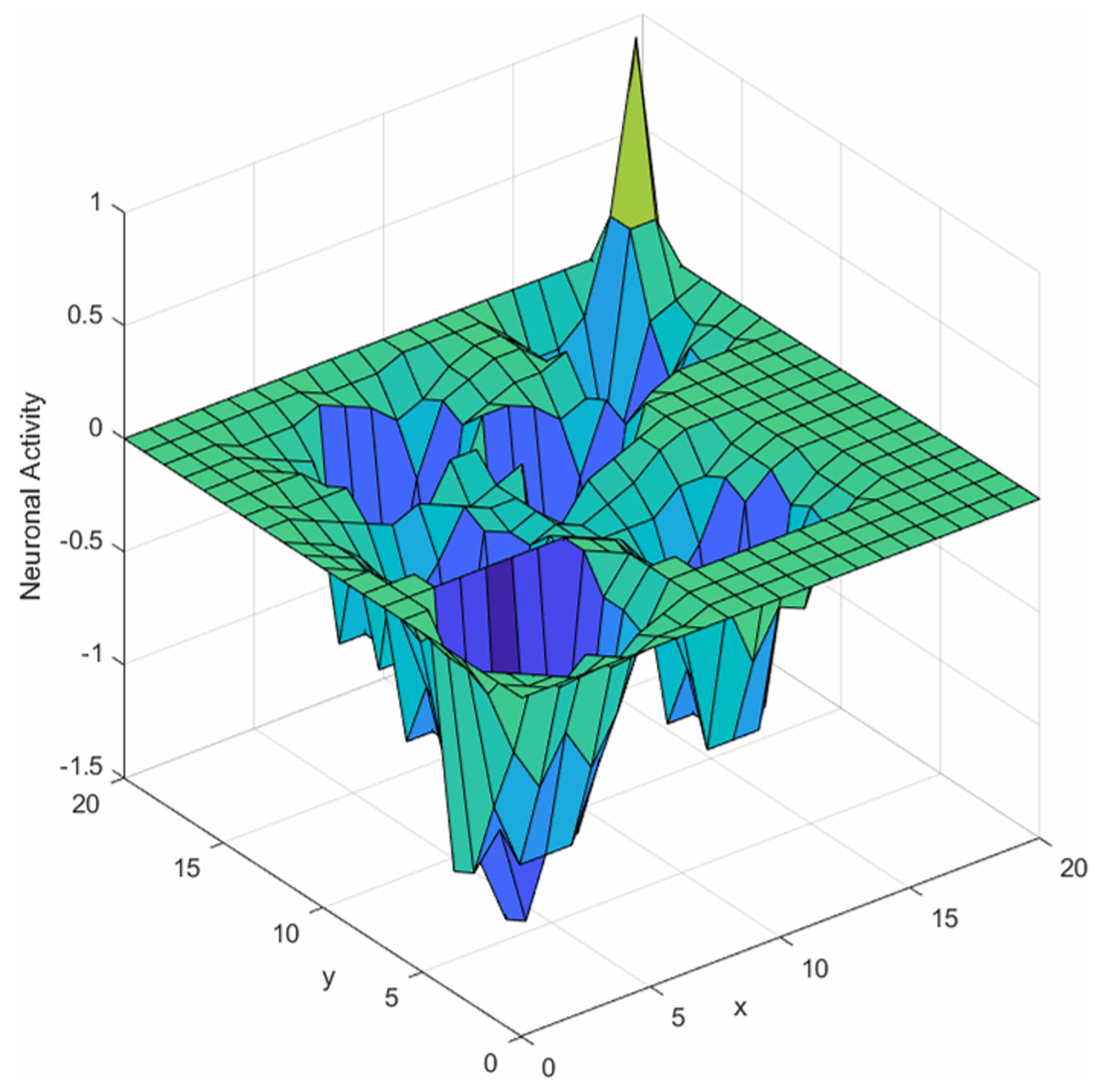
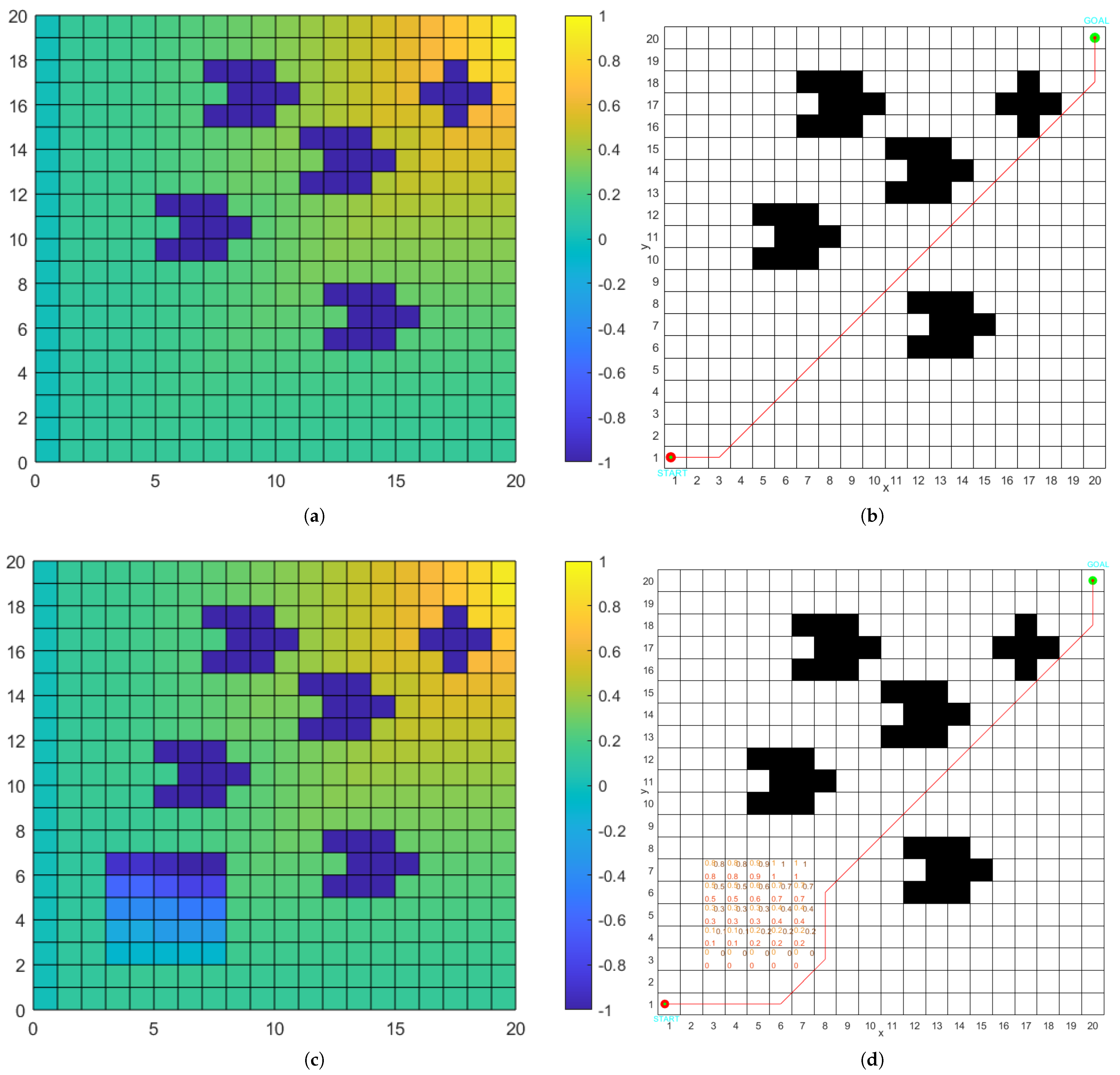
The distribution of initial activity values of neurons in complex environments is plotted in
Figure 6.
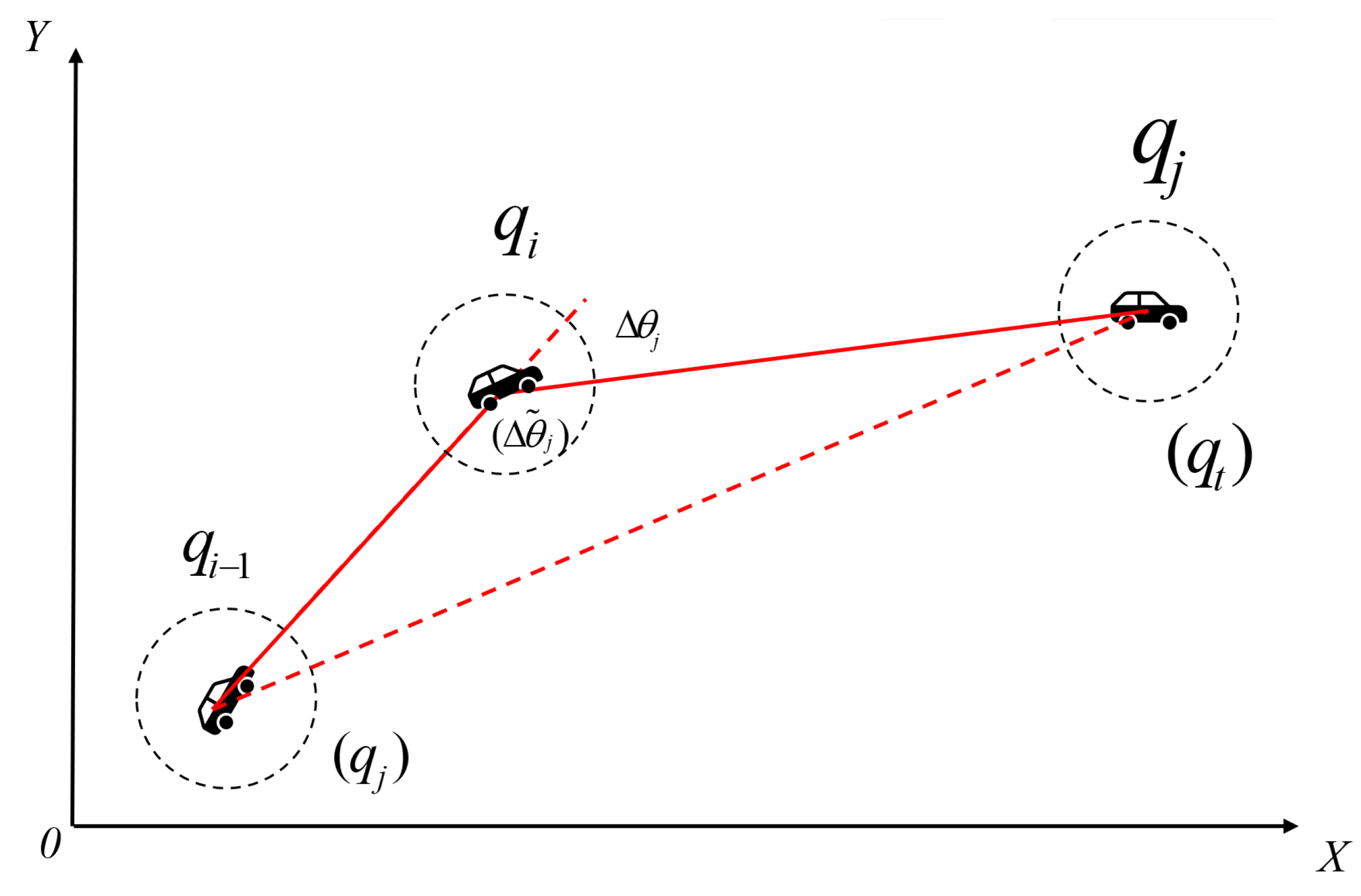
In order to save energy and improve the efficiency of mobile robots, factors such as taking the shortest path and least steering should be considered in path planning. In this paper, the influence of the target point on the path decision is added to the traditional path-decision model, and the next neuron and target-point neuron are introduced to establish a new path-decision model. The association between the local path decision and target point is strengthened by the magnitude of the angle composed of the next neuron, current neuron, and target-point neuron. The new path-decision model is given by Equation (
15):
In Equation (
15),
is the path-decision model,
is the next position,
and
are positive constants;
is the corner function, and
is the target-point reinforcement function.
The steering function
is expressed as (16) and (17):
In Equations (16) and (17), is the absolute turning angle of the robot movement.
The motion decision-making method of the robot is shown in
Figure 7.
The target reinforcement function
is expressed as (18) and (19):
In Equations (18) and (19), is the target-point position; is the angle formed by , , and .
4.2. Improvements to GA
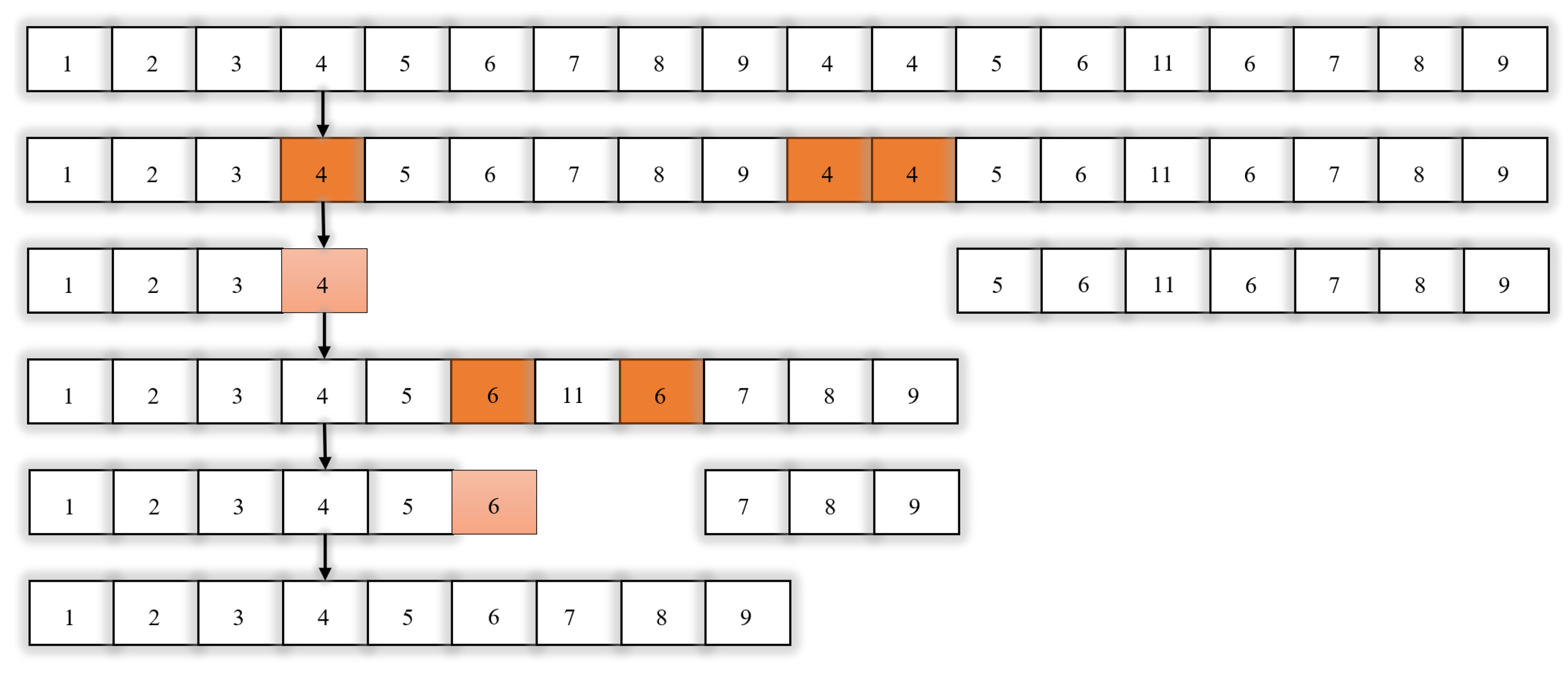
Since genetic algorithms have the same path points after crossover and mutation, the same path points will produce redundant paths, resulting in problems such as increased path length, increased arithmetic, and reduced arithmetic efficiency. To address this problem, this paper proposes a new IGA that adds a new knowledge operator to the traditional genetic algorithm, which removes redundant paths between the same path points in the paths, effectively accelerating the convergence speed, reducing the amount of operation, and improving the optimization efficiency, etc., as shown in
Figure 8. The steps of working with the knowledge operator are as follows:
Step 1: Determine if there is an identity for each path;
Step 2: If there is an identity, delete the first to the last point in the identity as well as the last identity;
Step 3: Repeat steps 1 and 2 until all path points are judged.
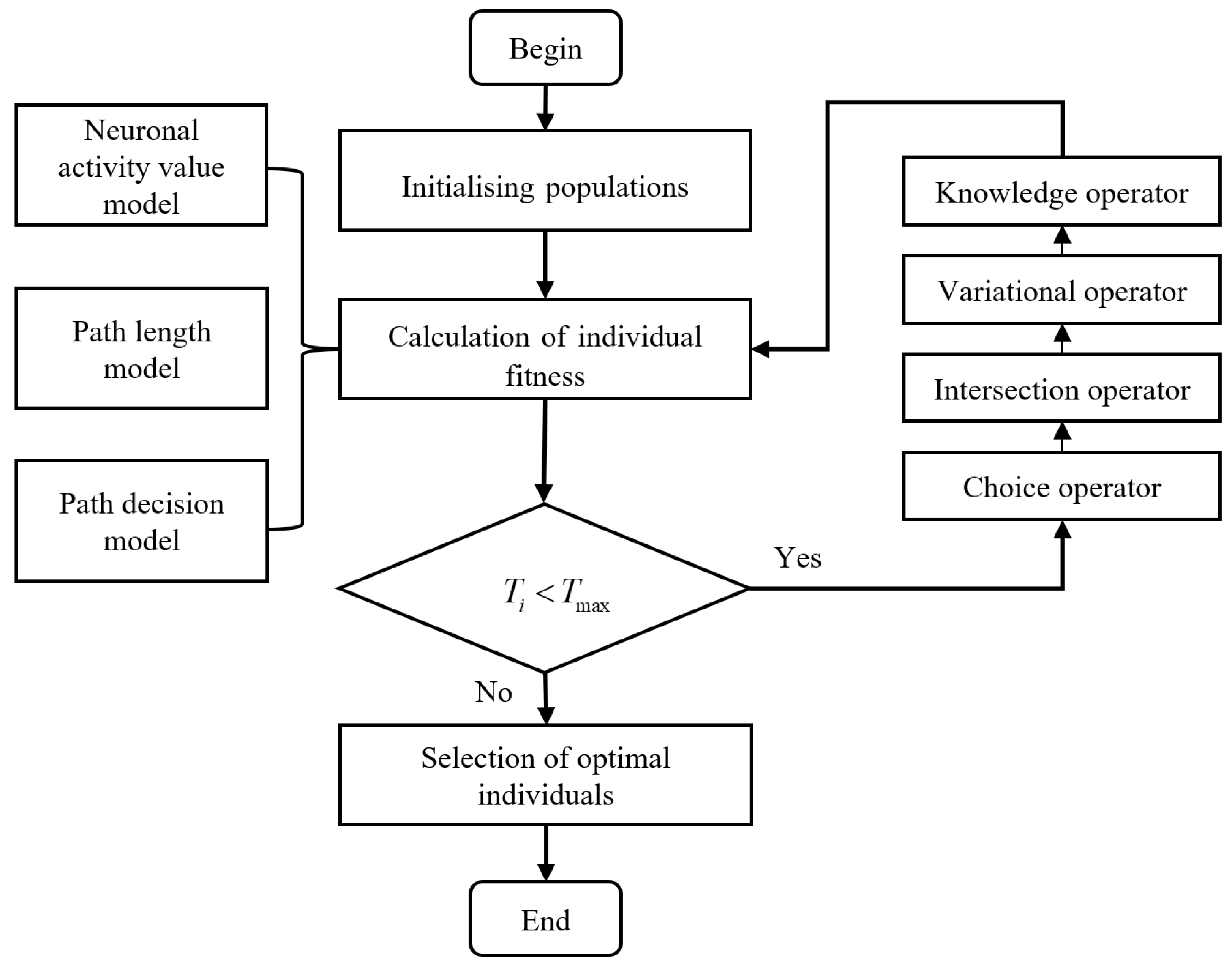
The workflow of the IGA in this paper is shown in
Figure 9.
4.3. HSBNN Algorithm
For the path planning problem for mobile robots, we need to consider the complex road environment factors. The improved BINN algorithm has strong local search optimization ability, but it is insufficient in global optimization ability. In order to improve its global path optimization ability, this paper combines the IGA algorithm with the improved BINN, and proposes the HSBNN algorithm. We take the neuron’s activity value model, path length model, and path-decision model together as the fitness function of the IGA, which can be expressed by Equation (
20):
In Equation (
20),
is the length model of the
kth path,
is the path-decision model of the
kth path, and
is the neuron activity value of the
kth path. The weights
,
, and
are set at 0.35, 0.35, and 0.3, respectively.
In complex road environments, the length of a path directly affects the energy consumption and operational efficiency of mobile robots. Longer paths result in increased runtime and energy usage, negatively impacting efficiency. Consequently, a weight of 0.35 is assigned to the path length to ensure that the algorithm prioritizes shorter routes during the planning process, thereby enhancing the robot’s operational efficiency.
Path decision making is crucial for ensuring the safety and stability of robots operating in complex environments. Effective path decisions enable robots to navigate around obstacles and challenging terrains, thereby minimizing the risk of collisions and minimizing vibrations during movement. By assigning a weight of 0.35 to path decision making, this highlights its significance in the path planning process, allowing the algorithm to generate routes that are both safer and more stable.
Neuronal activity provides insights into the real-time state of complex road environments, enabling robots to perceive changes in their surroundings and adapt effectively to varying road conditions. For instance, in challenging situations such as potholes or waterlogged surfaces, neuronal activity can assist robots in making more effective decisions. By assigning a weight of 0.3 to neuronal activity, the algorithm can effectively utilize environmental information for path planning while avoiding an over-reliance on any single factor, thus ensuring a balanced integration of multiple considerations in the decision-making process.
can be represented by Equation (
21).
We take the improved BINN as the adaptation function of IGA, and combine the global optimization seeking ability of IGA with the local optimization seeking ability of improved BINN to effectively improve the adaptive ability and work efficiency of mobile robots on complex roads, and the improved HSBNN algorithm is shown in
Figure 10.
6. Conclusions
To address the path planning challenges faced by mobile robots in complex road environments, this paper presents the HSBNN algorithm. To enhance the accuracy and effectiveness of the research, we have implemented several innovative improvements: we established a new complex road environment model that comprehensively incorporates factors such as road surface smoothness, adhesion, and gradient, allowing for a more realistic simulation of actual conditions and providing a solid foundation for subsequent path planning. By overcoming traditional limitations, we utilize neuron activation values to represent complex road environments, dynamically linking these values with surrounding road conditions and the robot’s driving status, which significantly enhances the model’s adaptability and flexibility. We developed a new neural network path-decision model that incorporates the influence of target points on path decisions, reinforcing the connection between local path choices and target points. This optimization reduces detours and sharp turns, leading to more efficient path selection. Furthermore, we introduced an improved genetic algorithm that incorporates knowledge-based operators into the traditional framework, effectively eliminating redundant path segments, thereby reducing computational complexity, accelerating convergence speed, and enhancing optimization efficiency.
By integrating the global optimization capabilities of the genetic algorithm with the local optimization strengths of the biologically inspired neural network as the fitness function, we significantly improve the path planning capabilities of mobile robots in complex environments, enabling rapid identification of more optimal paths.
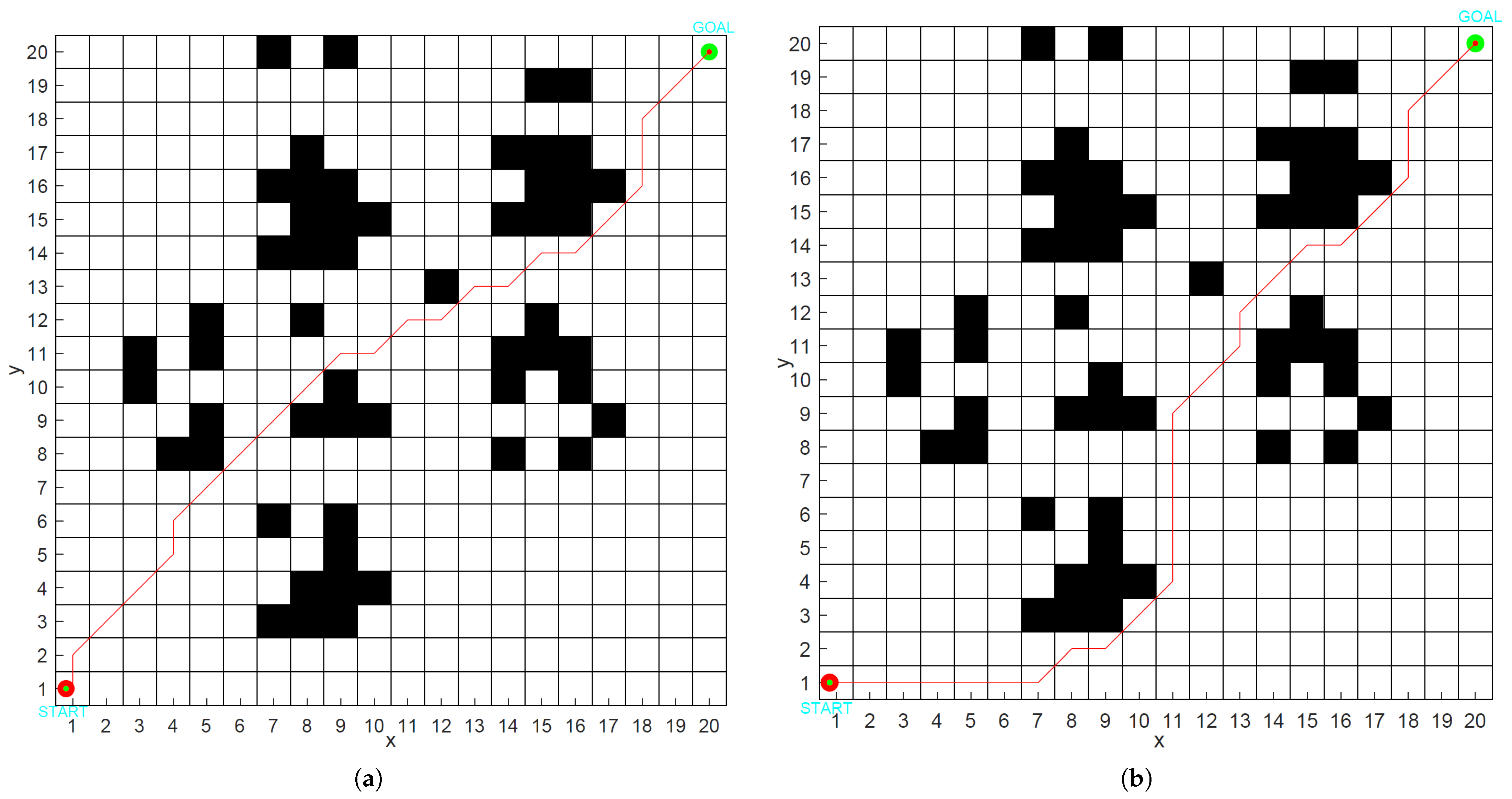
This paper presents a series of experiments conducted across various dimensions, demonstrating that the HSBNN algorithm significantly reduces the number of turns compared to other algorithms, achieving a maximum reduction of 10 turns and a minimum of 2 turns, thereby saving energy during turns. Additionally, the path distance is noticeably shortened, with a maximum reduction of 11.358%, which significantly enhances both the global and local optimization capabilities of the algorithm. In other comparative experiments, we observed that paths planned using the HSBNN algorithm feature fewer turns and shorter distances, effectively illustrating the robustness and universality of the algorithm.
In comparative experiments within complex road environments, we verified that the neuron activation values differ and that these values influence the path planning outcomes for mobile robots. This research can substantially enhance the adaptability and operational efficiency of mobile robots in complex environments. Given the constraints of the study timeline, the experimental validation primarily relies on predefined static environments, with dynamic environment modeling limited to scenarios involving the movement of a single obstacle. The current model’s adaptability to real-time changing complex scenarios and its capacity for real-time updates have not been thoroughly validated, which may compromise the robustness of path planning. Furthermore, the path planning process does not explicitly consider the kinematic constraints of mobile robots. The performance comparison experiments primarily focus on traditional algorithms such as genetic algorithm (GA), adaptive genetic algorithm (AGA), and ant colony optimization (ACO), without contrasting them with recently emerging intelligent algorithms.
To enhance the autonomous adaptability and operational range of mobile robots, we plan to deepen our research in the following directions in the future: 1. Integrate real-time modeling of dynamic environments and online learning algorithms. 2. Incorporate robotic kinematic models to optimize path feasibility. 3. Expand validation efforts to complex scenarios involving multi-robot collaboration and extreme terrain. 4. Design a multi-objective adaptive optimization framework to improve the generalization capability of the algorithms.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}