1. Introduction
Recommender systems are a pivotal solution to information overload that have been extensively implemented across diverse platforms to predict potential user preferences from massive item catalogs. Representative applications include course recommendations in online learning ecosystems [
1,
2], context-aware point-of-interest recommendations for location-based services [
3], and personalized product recommendations in e-commerce platforms [
4]. In practical scenarios, user behaviors exhibit temporal dynamics that continuously evolve over time [
5], necessitating the effective modeling of behavioral dependencies to generate appropriate suggestions, which is the core objective of sequential recommendation (SR) [
6]. This capability to decipher user preference trajectories from historical interaction patterns has driven growing research interest in SR [
7], positioning SR as a fundamental paradigm for temporal preference understanding.
Numerous deep neural network-based sequential recommendation models have been developed [
8] to explore the temporal dynamics of user preferences. These approaches leverage two primary data types to represent interaction histories: explicit feedback (e.g., ratings or dislikes) and implicit feedback (e.g., views and clicks). Existing research mainly focuses on implicit feedback due to its abundant availability and scalability in real-world applications [
9,
10]. In such paradigms, observed user–item interactions are treated as positive samples, while unobserved pairs are presumed to be negative instances. However, this binary assumption introduces significant noise as a user’s non-interaction with an item may stem from exposure limitations rather than inherent disinterest, which is a critical challenge arising from the stochastic nature and behavioral diversity in implicit feedback systems. Consequently, naively optimizing recommendation models without addressing these inherent noise issues leads to suboptimal preference extraction, diminished recommendation accuracy, and degraded user satisfaction [
11], highlighting the necessity of noise-aware modeling frameworks.
Some research has recognized the ubiquity of implicit feedback and its profound influence on recommendation quality and acknowledged the criticality of noise mitigation in implicit interaction data. Current denoising methodologies predominantly operate within the temporal domain and are broadly categorized into two streams: sample selection techniques [
12] and sample re-weighting strategies [
11,
13]. The former involve the design of specialized samplers to filter out noisy interactions, while the latter dynamically assign reduced weights to high-loss instances during training, guided by the memorization effect [
14]. These approaches are aligned with the frequency principle [
15], through which neural networks prioritize learning low-frequency (simpler, cleaner) patterns before assimilating high-frequency (complex, potentially noisy) features. Despite their empirical success, these temporal-domain approaches overlook a critical dimension of noise propagation, i.e., the contamination introduced through high-dimensional item embedding spaces. This limitation stems from their exclusive focus on instance-level noise in interaction sequences, failing to account for latent noise amplification during the embedding learning process.
Recent advancements in frequency-domain denoising have led to the introduction of FMLP-Rec [
7] and DWTRec [
16], which enhance item embeddings through spectral processing to address noise in sequential recommendation. Drawing inspiration from digital signal processing principles [
17], this approach leverages the Fast Fourier Transform (FFT) [
18] to project input embeddings into the frequency domain, where learnable filters attenuate noise before reconstructing purified embeddings via the inverse FFT. Empirical evaluations have demonstrated FMLP-Rec’s superiority over Transformer-based baselines, underscoring its efficacy in spectral feature refinement. Although this method is effective, its exclusive focus on frequency-domain operations neglects temporal noise inherent in raw interaction sequences, potentially propagating biased signals into the embedding space. The reliance on fixed-phase reconstructions with learnable weights restricts adaptive phase alignment, limiting the model’s capacity to preserve temporal coherence during spectral denoising. The equivalence between frequency-domain filtering and circular convolution in the time domain [
18] raises fundamental questions about the necessity of explicit positional encoding mechanisms in spectral architectures. These shortcomings highlight unresolved challenges in harmonizing temporal and spectral features for robust preference modeling.
Drawing on these insights, we present symmetry-aware sequential recommendation with dual-domain filtering networks, a novel hybrid framework that synergistically integrates temporal and spectral denoising mechanisms to address noise propagation in sequential recommendation systems. Our architecture first introduces a self-guided item denoising distiller that dynamically filters noisy interactions in the temporal domain, adhering to the frequency principle [
15] by prioritizing low-frequency (clean) preference signals before transitioning to high-frequency noise patterns during training. The purified interaction sequence is subsequently processed through an embedding denoising encoder, which implements adaptive spectral filtering via learnable basis functions and phase-aware weights in the frequency domain to further suppress residual noise in latent representations. Additionally, we conducted a systematic investigation of the role of positional encoding within spectral architectures, challenging conventional assumptions through theoretical analysis grounded in the convolution theorem. The concept of symmetry plays a fundamental role in our approach, manifesting in two key aspects, i.e., the symmetric relationship between temporal- and frequency-domain representations of user behavior and the balanced coordination between these dual domains. This symmetry-aware design enhances the robustness of recommendations by harmonizing sequential and spectral features. Comprehensive evaluations across four benchmark datasets demonstrate SR-FDN’s significant performance gains over representative baselines, including RNN-, CNN-, and attention-based architectures as well as specialized denoising models. These results validate the necessity of coordinated time–frequency processing for robust preference modeling. The code of SR-DFN is available at
https://github.com/MuziLee-x/SR-FDN, (accessed on 13 April 2025).
The main contributions of this paper are summarized as follows:
We propose SR-DFN, a novel dual-domain denoising framework for sequential recommendation that synergistically integrates a temporal-domain item denoising distiller with a frequency-domain embedding denoising encoder. The former employs self-adaptive filtering to identify behaviorally significant interactions, while the latter operates through spectral transformations to distill noise-resistant item representations, establishing a new paradigm for implicit feedback purification.
We integrate a multi-layered spectral processing module within the embedding denoising encoder, where each filtering layer implements parameterized spectral transformations through trainable basis functions and adaptive weights. This design enables the hierarchical refinement of item embeddings between the Fast Fourier Transform (FFT) and inverse FFT operations, effectively separating preference signals from spectral noise components.
Through theoretical analysis grounded in the convolution theorem, we challenge the necessity of conventional positional encoding in frequency-domain recommendation architectures. Systematic ablation studies empirically substantiate that positional embeddings introduce parameter redundancy without performance benefits, providing critical insights for efficient spectral modeling.
Extensive empirical evaluations across four benchmark datasets demonstrate SR-DFN’s consistent superiority over representative baselines spanning RNN-, CNN-, and attention-based paradigms and specialized denoising models. The quantitative results and ablation analyses jointly validate the framework’s effectiveness in cross-domain noise mitigation and preference modeling.
The organizational structure of this paper is as follows:
Section 2 critically reviews the pertinent literature in sequential recommendation and noise mitigation methodologies.
Section 3 formally introduces the proposed SR-DFN framework, elucidating its architectural components and theoretical underpinnings.
Section 4 presents comprehensive experimental evaluations, including comparative analyses with representative baselines and ablation studies. Finally,
Section 5 synthesizes key findings and outlines prospective research trajectories for dual-domain denoising in recommendation systems.
3. Methodology
This section provides a systematic exposition of the SR-FDN architecture through three methodological pillars. First, we establish the architectural framework and formal problem formulation. Second, we elaborate on the two core architectural constituents, namely, a temporal-domain item denoising distiller for interaction purification and a frequency-domain embedding denoising encoder for spectral representation refinement. Third, we delineate the operational mechanics of the prediction layer, accompanied by computational complexity analysis.
3.1. Problem Formulation
Sequential recommendation addresses the problem of predicting the subsequent item interaction within anonymized user behavior sequences, with a specific focus on preference modeling through implicit feedback signals [
9]. Formally, let
denote the user set and
represent the item set, where behavioral engagements (e.g., clicks) are encoded through binary indicators:
if user
interacted with item
; otherwise, it is 0. Each user
u’s interaction history is represented as a temporal sequence
, where
corresponds to the
t-th interaction within sequence length
. Conventional sequential recommendation approaches [
26,
33] assume that the interaction could represent the users’ true preferences and directly fit the implicit feedback to model
f with parameters
in the time domain without explicit noise mitigation mechanisms.
The inherent presence of noise contamination in implicit feedback undermines conventional sequential recommendation models’ capacity to discern authentic user preferences, thereby compromising predictive accuracy. Consequently, our work addresses this challenge by developing a filter-enhanced denoising architecture to predict the -th item of potential interest to user u from noise-corrupted interaction sequences . This formulation explicitly recognizes the discrepancy between observed interactions and true preferences, necessitating dual-domain noise mitigation to recover preference signals from contaminated temporal sequences prior to spectral embedding refinement.
3.2. Model Overview
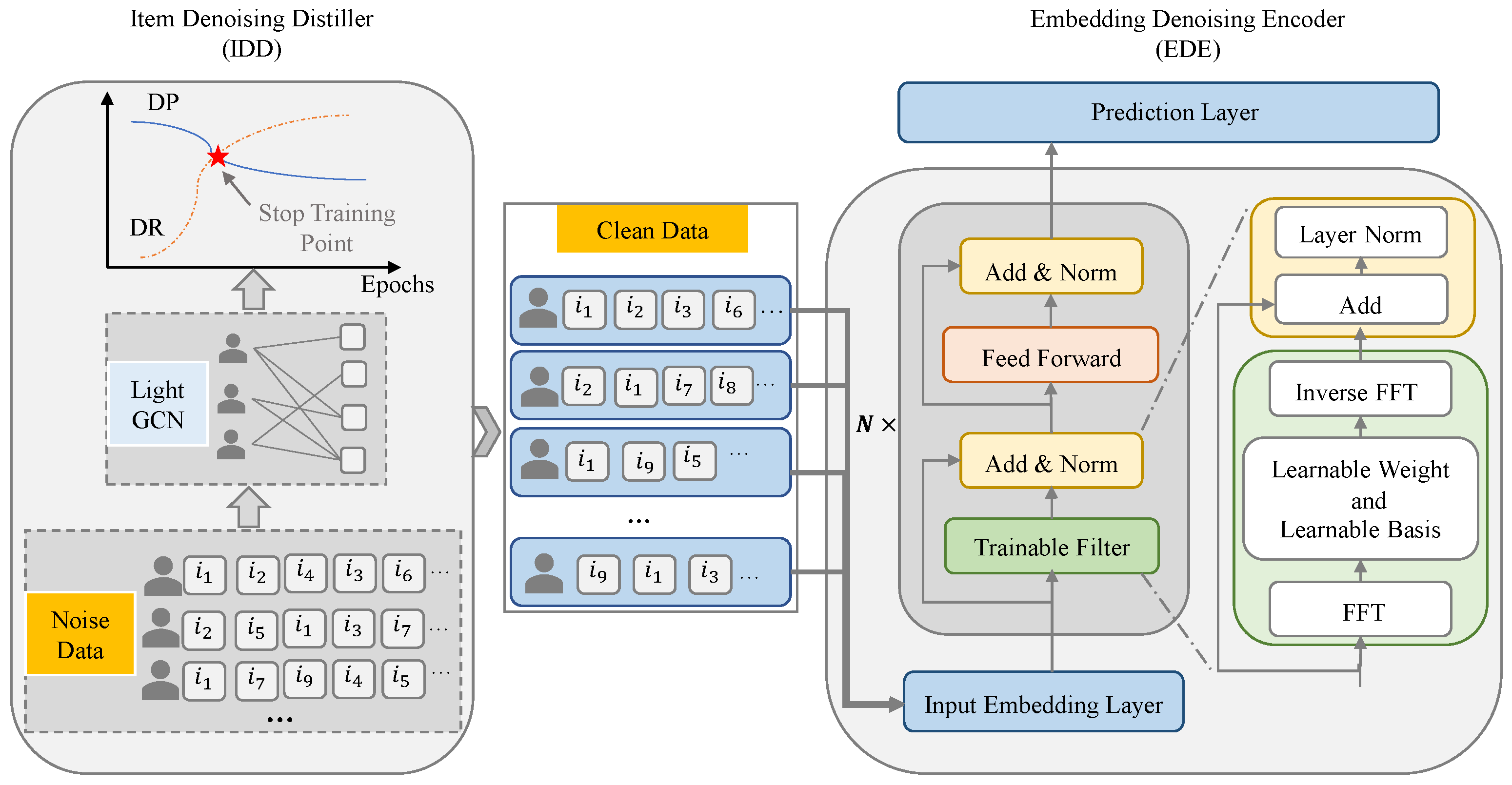
Figure 1 presents the architectural blueprint of SR-DFN, which systematically addresses noise contamination through coordinated temporal and spectral processing. The framework initiates with an item denoising distiller (IDD) that operates on raw implicit feedback sequences
, performing self-guided temporal purification by identifying optimal memorization thresholds in accordance with the frequency principle [
15]. This module outputs distilled interaction sequences
, where spurious interactions are suppressed through adaptive dropout. The refined sequences are then processed by the embedding denoising encoder (EDE), which executes spectral refinement through three key operations, i.e., the frequency transformation of item embeddings, learnable spectral filtering with parameterized basis functions, and inverse FFT reconstruction of noise-attenuated embeddings. This dual-domain architecture enables hierarchical noise mitigation, i.e., the temporal pruning of interaction sequences followed by spectral purification of latent representations. The final prediction layer computes preference scores through the attention-weighted aggregation of denoised embeddings. The IDD and EDE modules pursue the common goal of noise suppression while functioning in complementary domains, thereby establishing structural symmetry. Subsequent sections elaborate on the technical implementation.
3.3. Item Denoising Distiller
The item denoising distiller (IDD) strategically terminates training at the critical juncture where model optimization transitions from low-frequency preference signals to high-frequency noise memorization. It is guided by the frequency principle [
15], which posits that deep neural networks initially assimilate low-frequency patterns before progressively learning high-frequency components (including noise artifacts). This operational paradigm aligns with self-supervised denoising strategies discussed in [
34], enabling the IDD to preserve interaction patterns corresponding to authentic user preferences while discarding high-frequency noise contaminants. The distilled outputs, representing noise-filtered temporal interactions, subsequently serve as optimized inputs for the embedding denoising encoder (EDE). Next, we introduce how our method filters the noise items in the implicit feedback and memorizes the clean interactions.
3.3.1. Recommendation Model
The principal objective of the item denoising distiller (IDD) involves training a recommendation model to dynamically identify clean interaction samples through the continuous monitoring of training dynamics. Established architectures such as NeuMF [
35] and LightGCN [
33] serve as viable candidates for this recommendation model, as demonstrated in prior work [
34]. LightGCN [
33] is highly effective at capturing high-order collaborative signals within user–item bipartite graphs. By eliminating nonlinear feature transformations, LightGCN simplifies the graph convolution network. Its inherent simplicity and strong performance make it an excellent choice for this application. Therefore, we adopted LightGCN within the IDD module to enable a focused effort on filtering noisy interactions.
LightGCN [
33] employs linear propagation mechanisms over user–item interaction graphs to iteratively refine embeddings, where final representations are derived through layer-wise weighted aggregation. Formally, let
and
denote the trainable user and item embeddings at the initialization layer. The
layer representations are computed via graph convolution:
where
and
represent neighbor sets, and the normalization term
can avoid the scale of representations increasing with graph convolution operations. The final embedding is obtained through learnable layer combination:
with
as aggregation weights. Following LightGCN [
33], we set
uniformly to
. This design eliminates nonlinear transformations while preserving collaborative signals.
3.3.2. Model Training
Following the architectural paradigm established in LightGCN [
33], we adopted the Bayesian Personalized Ranking (BPR) pairwise loss [
9] to optimize model parameters, formulated as follows:
where
denotes the triplet training set,
represents the sigmoid function, and
controls
-regularization intensity. This objective function enforces positive items
i to be ranked higher than negative samples
j for each user
u, preserving the relative preference ordering.
3.3.3. Distilling Interactions
Building upon the memorization-driven denoising framework established in [
34], we define interaction
as a clean sample eligible for memorization at epoch tt if it resides within the user-specific ranking list
. To enhance distillation reliability, each user’s ranking list is populated with their top-
k predicted items based on current model outputs. To mitigate instability inherent in single-epoch distillation, we implemented an
h-epoch moving window mechanism that aggregates recent distillation outcomes. The final distilled interaction set
is formally defined as follows:
where
selects the most recent
h epoch histories of interaction
. We define an interaction
memorized by the LightGCN if the majority of the recent histories
coincide with the memorization state; that is,
is larger than 0.5.
3.3.4. Early Stop Mechanism
Guided by the frequency principle [
15], neural networks progressively assimilate low-frequency components (authentic interactions) during initial training phases before transitioning to high-frequency noise memorization. Consequently, the critical challenge for the IDD module lies in dynamically monitoring training dynamics to terminate optimization at the critical juncture when high-frequency noise assimilation commences (i.e., the inflection point where model behavior shifts from preference learning to overfitting). This operational threshold is identified through spectral analysis of loss curvature and gradient coherence metrics.
Formally, let
denote the distilled interaction set at epoch
t, with
representing the latent true label of interaction
, which is a variable obscured by implicit feedback. Following [
34], we introduce two distillation metrics to monitor training dynamics:
where
denotes correctly distilled interactions, and
represents the ground-truth clean interaction set. As theoretical foundations suggest [
15],
exhibits a monotonically decreasing trend (i.e., initially capturing low-frequency clean interactions before progressively memorizing high-frequency noise). Conversely,
demonstrates a monotonically increasing trajectory as the model eventually assimilates all clean patterns. The optimal equilibrium point occurs when
, signifying the critical juncture where maximal clean interaction retention aligns with minimal noise contamination. This inflection point serves as the training termination threshold for the IDD module.
We formally demonstrate the monotonic evolution of
and
across training epochs
t. Let
denote the subset of memorized interactions with erroneous predictions at epoch
t. By definition, the relationship among
, and
satisfies
Guided by the frequency principle [
15], the inequality
holds post model stabilization, as noise assimilation outpaces clean interaction learning. This relationship yields (
7), which establishing the monotonically decreasing property of
.
Conversely, the frequency principle [
15] posits that clean interactions dominate early-stage learning, implying
. This leads to the following:
Thus,
exhibits a monotonically increasing trajectory. Collectively, these proofs confirm that
decreases and
increases monotonically throughout training.
The learning algorithm of the IDD is summarized in Algorithm 1.
| Algorithm 1: Learning algorithm of IDD. |
![Symmetry 17 00813 i001]() |
3.4. Embedding Denoising Encoder
While the majority of denoising research in recommendation systems operates within the temporal domain, recent work by FMLP-Rec [
7] pioneers frequency-domain denoising through spectral filtering. However, we identify two critical limitations in FMLP-Rec: (I) The convolution theorem [
18] establishes that frequency-domain filtering corresponds to circular convolution in the temporal domain. This equivalence introduces parameter redundancy through circular padding artifacts, impairing model efficiency and recommendation accuracy. (II) FMLP-Rec restricts spectral adaptation to learnable amplitude weights, neglecting phase alignment optimization. This constraint inhibits the adaptive reconstruction of denoised embeddings, as phase coherence governs temporal signal preservation during inverse Fourier transforms. To address these limitations, we propose the embedding denoising encoder (EDE), depicted in
Figure 1. The EDE comprises three components: an embedding layer that projects distilled interactions into latent representations; a filtering layer implementing adaptive spectral transformations with phase-aware modulation; and a prediction layer for final preference scoring. The subsequent sections detail each component’s architectural implementation.
3.4.1. Embedding Layer
The embedding layer transforms sparse, one-hot item encodings into dense, low-dimensional representations through an embedding lookup procedure. Formally, given an item sequence of length
n, we construct the input embedding matrix
via linear projection from the item embedding matrix
. To mitigate the instability caused by stochastic initialization, we adopted the stabilization strategy from FMLP-Rec [
7], applying dropout and layer normalization sequentially:
This preprocessing yields stabilized sequence representations
, where dd denotes the latent dimension. The layer normalization operation ensures zero-mean and unit-variance distributions across embedding dimensions, while dropout regularizes against overfitting to spurious correlations in the initial training phase.
3.4.2. Filtering Layer
In addition to the embedding layer, we implemented hierarchical noise reduction through N cascaded filtering layers, where the output of layer k serves as input to layer . Each filtering layer comprises two core components: a filtering block that executes parameterized spectral transformations and a feed-forward network that introduces nonlinear feature interactions. This modular architecture enables the progressive refinement of item embeddings across successive layers while maintaining gradient flow through residual connections.
To attenuate noise in item embeddings, we implemented spectral filtering operations through frequency-domain transformations coupled with skip connections and layer normalization for training stabilization. Given sequence embedding
, we first apply a one-dimensional Fast Fourier Transform (FFT) along the temporal axis to project embeddings into the frequency domain:
where
denotes the FFT operator and
represents the complex-valued spectral tensor encoding both amplitude and phase information. This transformation preserves the structural integrity of temporal patterns while enabling frequency-selective noise suppression through spectral manipulation.
To enhance the denoising efficacy of the filtering block, we modulate both the Fourier spectrum and phase components through two adaptive mechanisms: a learnable frequency filter
and a learnable spectral basis
. This dual modulation is formalized as follows:
where ⊙ denotes the Hadamard product. The learnable filter
enables the frequency-selective attenuation of noise components, while the learnable basis
facilitates adaptive phase alignment to preserve temporal coherence during signal reconstruction. This dual modulation aligns with signal processing principles, wherein phase distortions degrade temporal fidelity. Unlike conventional approaches that solely optimize amplitude spectra, this joint spectral-phase optimization empowers the model to learn arbitrary frequency-domain transformations, thereby capturing both magnitude and temporal-shift characteristics for denoising.
The modulated spectrum
is transformed back to the temporal domain via an inverse Fast Fourier Transform (IFFT), reconstructing denoised sequence representations:
where
denotes the IFFT operator converting complex spectral tensors into real-valued temporal embeddings. This spectral-to-temporal transformation, governed by the convolution theorem [
18], effectively suppresses high-frequency noise artifacts while preserving low-frequency preference signals. The synergistic application of the FFT and IFFT operations enables hierarchical noise attenuation; that is, spectral filtering removes high-dimensional noise components, while phase-aware reconstruction maintains temporal coherence in the purified embeddings
.
To conclude the filtering block operations, we adopted the stabilization techniques from SASRec [
25] by integrating residual connections with dropout and layer normalization. This design mitigates gradient vanishing and enhances training stability through the following transformation:
where
denotes the original input embeddings to the filtering block. The residual connection preserves raw signal integrity, while dropout regularizes high-frequency noise reintroduction during spectral reconstruction. Layer normalization ensures stable activation distributions across the transformed embeddings.
The feed-forward network (FFN) enhances model expressiveness by capturing nonlinear feature interactions through hierarchical transformations. Formally, the FFN processes filters embeddings
via a two-layer perceptron:
where
and
denote weight matrices, and
and
are bias terms. To stabilize gradient flow and mitigate optimization instability, we integrate residual connections and layer normalization. This architecture enables adaptive feature recalibration while preserving information integrity through skip connections.
3.4.3. Prediction Layer
The prediction layer couples with the final output of the EDE to compute user preference scores for candidate items based on interaction history. Formally, the likelihood of item
being the
-th interaction is calculated as follows:
where
denotes the final embedding of item
, and
represents the temporal position-specific output from the
N-th filtering layer at timestep
. Here,
N corresponds to the total number of stacked filtering layers in the EDE architecture. This dot-product formulation preserves the inner-product space compatibility between user preference vectors and item embeddings while ensuring computational efficiency.
The training objective for the EDE module employs a pairwise ranking loss to optimize model parameters. For a given user
u with interaction sequence
, the user-specific loss is formulated as follows:
where
T denotes the sequence length,
represents the observed positive item at timestep
, and
corresponds to randomly sampled negative instances. The sigmoid function
ensures the probabilistic normalization of preference score differentials. The global optimization objective aggregates losses across all users in the training set, i.e.,
, enforcing discriminative ranking between positive and negative interactions throughout the user population. This objective function aligns with Bayesian Personalized Ranking principles [
9], prioritizing relative preference ordering over absolute score calibration.
The pseudocode for EDE is summarized in Algorithm 2.
| Algorithm 2: Learning algorithm of EDE. |
![Symmetry 17 00813 i002]() |
3.5. Complexity Analysis
3.5.1. Model Size
The parameter composition of SR-DFN originates from two principal modules: the item denoising distiller (IDD) and the embedding denoising encoder (EDE). LightGCN [
33] was adopted as the backbone recommendation model of the IDD module, and the trainable parameters are exclusively derived from item ID embeddings. This design yields a parameter-efficient architecture with total parameters quantified as
, where
denotes the item cardinality, and
represents the embedding dimension in the IDD module. The EDE module employs a multi-layer perceptron (MLP) framework, with parameters accumulated across the embedding layer and stacked filtering layers. The total parameter count is expressed as
, where
denotes the embedding dimension in the EDE module;
N is the number of filtering layers;
and
are the parameters from spectral filtering operations; and
are the parameters in the feed-forward networks.
3.5.2. Time Complexity
The computational complexity analysis of SR-DFN involves the following: Assuming LightGCN [
33] exhibits a baseline time complexity of
, the additional computational overhead introduced by SR-DFN primarily stems from the embedding denoising encoder (EDE). The EDE’s complexity arises from two key operations, i.e., the Fast Fourier Transform (FFT) and inverse FFT with asymptotic time complexity
and feed-forward networks with linear complexity
, where nn denotes the sequence length. Consequently, the incremental time complexity of SR-DFN relative to LightGCN is dominated by
, demonstrating favorable scalability with respect to data volume. Overall, for stacked layers
N and embedding size
d, the complexity of EDE becomes
. Crucially, the convolution theorem [
18] underpins this design by establishing mathematical equivalence between frequency-domain filtering and circular convolution in the temporal domain. This theoretical foundation enables SR-DFN to achieve global sequence modeling capabilities through spectral transformations, circumventing the locality constraints of traditional convolutional operations while maintaining computational tractability.
3.6. Relation to Previous Work
The proposed SR-DFN framework intersects with and advances two key research directions: frequency-domain denoising (FMLP-Rec [
7]) and temporal-domain sample selection (SDGL [
34]). We delineate their conceptual and technical distinctions as follows:
3.6.1. Differentiation from FMLP-Rec
Dual-Domain Denoising Scope: FMLP-Rec exclusively focuses on the spectral purification of item embeddings, neglecting temporal noise in interaction sequences. In contrast, SR-DFN implements coordinated denoising through temporal interaction filtering (IDD module) and spectral embedding refinement (EDE module).
Spectral Modulation Mechanism: While FMLP-Rec employs learnable amplitude weights, SR-DFN introduces joint amplitude–phase optimization via Equation (
11), the adaptive phase alignment of which is absent in FMLP-Rec. Further analysis of the ablation experiment is given in
Section 4.3.2.
Position Encoding Efficiency: FMLP-Rec incorporates learnable positional embeddings, whereas SR-DFN eliminates this component (see Equation (
9)) based on the empirical evidence of parameter redundancy (see
Section 4.3.3).
3.6.2. Differentiation from SDGL
SDGL operates solely in the temporal domain through two-phase sample selection, disregarding spectral noise propagation. SR-DFN includes SDGL’s temporal distillation strategy, but this is augmented with theoretical grounding via the frequency principle [
15] and complementary spectral denoising in the EDE module.
3.6.3. Integrative Innovations
SR-DFN introduces critical enhancements:
Phase-Aware Spectral Filtering: The learnable basis
in Equation (
11) enables dynamic phase modulation, addressing FMLP-Rec’s phase rigidity.
Parameter Efficiency: Ablation studies (
Section 4.3.3) validate SR-DFN’s elimination of redundant positional embeddings, reducing parameters by
(where
denotes positional dimensions).
Synergistic Superiority: As demonstrated in
Section 4.3, SR-DFN’s performance gains stem not from isolated components but from the symbiotic integration of temporal distillation, spectral-phase optimization, and parameter-efficient design.
This holistic architecture establishes SR-DFN as a novel paradigm rather than a naive hybrid of prior works, advancing both theoretical and practical frontiers in denoising recommendation systems.
4. Experiments and Analysis
Our empirical evaluation systematically addresses four critical research questions to validate the effectiveness and innovation of SR-DFN:
RQ1 How does SR-DFN perform compared to the representative recommendation baselines across diverse datasets?
RQ2 What are the individual contributions of SR-DFN’s core components (the IDD and EDE) to the overall performance?
RQ3 How does SR-DFN perform with varying noise levels and flitering numbers?
RQ4 What are SR-DFN’s convergence properties?
To rigorously address these questions, we first delineate the experimental setup, including benchmark datasets, evaluation protocols, and baseline implementations. The subsequent sections present quantitative analyses, ablation studies, and sensitivity tests to comprehensively validate SR-DFN’s capabilities.
4.1. Experimental Settings
4.1.1. Dataset
To validate the proposed methodology, comprehensive empirical evaluations were performed across four real-world public datasets sourced from diverse application domains. We confirm full compliance with data usage policies stipulated by each dataset provider throughout our experimentation.
Table 1 provides a statistical synopsis of the benchmark datasets.
MovieLens (
https://grouplens.org/datasets/movielens, accessed on January 2009.): A benchmark dataset for recommendation systems comprising user-provided movie ratings on a 1–5 scale. In our implementation, interactions with ratings below 3 were identified as noisy instances.
MOOCCube (
http://moocdata.cn/data/MOOCCube, accessed on July 2020.): An open educational dataset derived from XuetangX [
36]. This repository captures fine-grained user engagement through video-watching durations spanning seconds to hours. In our implementation, interactions with viewing durations below 5 min were annotated as noisy instances.
PEEK (
https://github.com/sahanbull/PEEK-Dataset, accessed on October 2021.): An open-access dataset designed for personalized educational engagement analysis [
37]. This resource annotates learner–video interactions as positive when viewing progress exceeds 75% of the video duration, with shorter engagements labeled as 0. Following established noise filtering strategies in the recommendation literature, instances labeled as 0 were treated as noise interaction.
Yelp (
https://www.yelp.com/dataset, accessed on January 2019.): A publicly available benchmark dataset for business recommendation systems, curated from establishment reviews and transaction records. Following temporal filtering protocols, we utilized interaction data with ordinal ratings below 3 annotated as noisy interactions.
We implemented data partitioning and preprocessing protocols to ensure rigorous experimental evaluation across all datasets. For each user’s interaction sequence, the first 80% of temporally ordered interactions were allocated for training, the subsequent middle 10% for validation, and the final 10% for testing. Prior to partitioning, we grouped interactions by user identifiers, sorted them chronologically in ascending order, and filtered users with fewer than five historical interactions.
Table 1.
Statistics of the datasets utilized in this work.
Table 1.
Statistics of the datasets utilized in this work.
| Dataset | #Users | #Items | Avg. Length | Sparsity |
|---|
| MovieLens | 0.9 K | 1.7 K | 96.8 | 94.1% |
| MOOCCube | 17.6 K | 32.7 K | 59.1 | 99.7% |
| PEEK | 7.2 K | 7.0 K | 7.8 | 99.8% |
| Yelp | 3.6 K | 73.1 K | 16.7 | 99.9% |
4.1.2. Evaluation Metrics
We adopted a leave-one-out evaluation protocol aligned with established practices in sequential recommendation research [
34] to evaluate the recommendation efficacy of SR-DFN under implicit feedback conditions. Recommendation quality was quantified through three widely adopted metrics for top-
K ranking assessment, namely, the Hit Ratio (HR@
k), Normalized Discounted Cumulative Gain (NDCG@
k), and Mean Reciprocal Rank (MRR), which have been widely adopted in related works [
34]. Given the equivalence
, we report HR@{1, 5, 10}, NDCG@{5, 10}, and MRR for comprehensive analysis. Following the negative sampling strategy in [
7], each ground-truth positive item was paired with
randomly sampled negative instances that the user had not interacted with, ensuring balanced evaluation under practical computational constraints.
4.1.3. Baselines
To evaluate the comparative performance of our proposed SR-DFN framework, we conducted extensive benchmarking against state-of-the-art baselines spanning five architectural paradigms, namely, RNN-based, CNN-based, attention-based, GNN-based, and denoising-based recommendation methods.
NeuMF [
35]: A state-of-the-art method that generalizes factorization machines with a multi-layer perceptron to model non-linearities.
GRU4Rec [
21]: An RNN-based model that applies GRU with ranking loss to model user behavior interactions.
Caser [
22]: A CNN-based model that uses convolutions to model the sequence information for recommendation.
SASRec [
25]: An attention-based method that utilizes a unidirectional self-attention mechanism to model the whole sequence for the sequential recommendation.
BER4Rec [
26]: A model including a deep bidirectional self-attention network to model user preference.
SR-GNN [
23]: A GNN-based method that models a session as the combination of the global preference and the current interest of that session.
SDGL [
34]: An approach that identifies informative data based on an adaptive denoising scheduler to enhance robustness.
FMLP-Rec [
7]: A new denoising method that performs item embedding denoising via an all-MLP architecture in the frequency domain.
FEARec [
38]: A novel denoising method that augments time-domain self-attention with a frequency-domain approach.
4.1.4. Implementation Details
The implementation and experimental configuration of SR-DFN were as follows: The framework was developed using PyTorch 1.4, optimized via the Adam optimizer with default momentum parameters. In the case of the IDD module, we inherited architectural components and hyperparameters (e.g., layer configurations and batch size) from LightGCN [
33] to ensure fair benchmarking. The SR-FDN model underwent rigorous evaluation through iterative training cycles, with key parameters, i.e., specifically dropout rate, learning rate, batch size, and filtering layer, systematically adjusted to identify optimal configurations for each experimental scenario. Specifically, the learning rate and batch size in the EDE module were set to 0.001 and 128, respectively. We set the dropout rate of turning off neurons to 0.5 on the five datasets. We stacked three filtering layers on the MovieLens and Yelp datasets to enable the model to learn robust sequence representation. As for the MOOCCube and PEEK datasets, we stacked two filtering layers. Moreover, we set the dimensions of the item embeddings to 64 for the MovieLens, PEEK, and Yelp datasets and 128 for the MOOCCube dataset. Experiments were repeated five times with identical configurations and performance metrics averaged to mitigate stochastic variance. This ensures statistically robust comparisons against baselines.
As for the baseline methods NeuMF (
https://github.com/hexiangnan/neural_collaborative_filtering, accessed on April 2017), GRU4Rec (
https://github.com/hidasib/GRU4Rec, accessed on May 2016), Caser (
https://github.com/graytowne/caser, accessed on February 2018), SASRec (
https://github.com/kang205/SASRec, accessed on November 2018), BER4Rec (
https://github.com/FeiSun/BERT4Rec, accessed on November 2019), SR-GNN (
https://github.com/CRIPAC-DIG/SR-GNN, accessed on January 2019), SDGL (
https://github.com/ZJU-DAILY/SGDL, accessed on July 2022), FMLP-Rec (
https://github.com/RUCAIBox/FMLP-Rec, accessed on April 2022), and FEARec (
https://github.com/sudaada/FEARec, accessed on July 2023), we utilized the source code released by the corresponding authors. We employed the same model structure present in the original work, including the hyperparameters, and focused on tuning the learning rate.
4.2. Overall Performance (RQ1)
The comparative performance analysis between SR-DFN and baselines across evaluation metrics is summarized in
Table 2, with key observations articulated as follows:
In general, SR-DFN demonstrates statistically significant performance advantages over all baselines across most datasets. In the case of the MovieLens dataset, SR-DFN demonstrates improvements of about 12.27% HR@10, 9.40% NDCG@10, and 7.19% MRR against the strongest baseline. With the MOOCCube dataset, SR-DFN exceeds the optimal baseline by about 1.36% for NDCG@10 and 1.31% for MRR. Using the PEEK dataset, SR-DFN demonstrates improved results by about 4.52% for HR@10, 6.45% for NDCG@10, and 6.73% for MRR compared with the best baseline, while for the Yelp dataset, SR-DFN exhibits a reduction in performance by about 4.73% in terms of NDCG@10, attributed to shorter sequence lengths.
FEARec leads the attention-based methods, followed by FMLP-Rec, SR-GNN, and BERT4Rec. SR-DFN surpasses all three on MovieLens, MOOCCube, and PEEK, validating its dual-domain denoising efficacy. Attention mechanisms inherently perform soft denoising via relevance weighting but fail to eliminate noise propagation entirely. However, even with a small weight, the noise items may mislead model training and pass negative information to the prediction layer, thus reducing recommendation performance. More importantly, as discussed in
Section 3, the denoising operation in the frequency domain enables the SR-DFN and FMLP-Rec methods to possess a global attention-like mechanism.
In the non-attention methods, context-aware models (Caser, GRU4Rec) outperform NeuMF by capturing local sequential dependencies. However, FMLP-Rec’s spectral denoising exceeds these methods across datasets, underscoring the importance of frequency-domain purification. SR-DFN further outperforms FMLP-Rec on three datasets, confirming the necessity of coordinated time–frequency denoising. This indicates that learning robust item embeddings in the frequency domain is beneficial for improving recommendation accuracy.
The recommendation accuracy of SR-DFN is better than that of the baseline methods in the case of datasets with long average lengths (e.g., MovieLens and MOOCCube). These results were not observed for the datasets with short average sequence lengths (e.g., Yelp). In scenarios characterized by sparse interactions and ambiguous preferences, both temporal and spectral denoising face inherent challenges: sparse interactions limit IDD’s sample purification, while short sequences hinder EDE’s ability to capture periodic patterns. On the one hand, the longer the average length of the user behavior, the more information can be utilized to capture user preferences. Based on this, it is easier for SR-DFN to distinguish between clean data and noisy data in long average length datasets, thereby improving recommendation accuracy. On the other hand, the datasets with shorter average sequences contain less user preference information, and coupled with the randomness and diversity of user behavior, it is not trivial to select the clean samples in the implicit feedback. However, the recommendation accuracy of SR-DFN on the PEEK dataset is better than that on the Yelp dataset. The reason is that in PEEK, the user’s short-term learning objective (preference) is explicit, which reduces the behavior’s randomness.
Table 2.
Performance comparison of SR-DFN versus baselines across datasets. Bold values indicate the highest scores.
Table 2.
Performance comparison of SR-DFN versus baselines across datasets. Bold values indicate the highest scores.
| MovieLens | HR@1 | HR@5 | HR@10 | NDCG@5 | NDCG@10 | MRR |
| NeuMF | 0.1256 | 0.3875 | 0.5230 | 0.2503 | 0.3081 | 0.2510 |
| GRU4Rec | 0.1382 | 0.3914 | 0.5335 | 0.2673 | 0.3136 | 0.2643 |
| Caser | 0.1305 | 0.3903 | 0.5300 | 0.2537 | 0.3098 | 0.2586 |
| SASRec | 0.1774 | 0.4401 | 0.5989 | 0.3033 | 0.3569 | 0.2998 |
| BERT4Rec | 0.2020 | 0.5127 | 0.6226 | 0.3681 | 0.3681 | 0.3441 |
| SR-GNN | 0.1502 | 0.3804 | 0.5021 | 0.2716 | 0.3205 | 0.2733 |
| SDGL | 0.2104 | 0.5261 | 0.6413 | 0.3844 | 0.4092 | 0.3447 |
| FMLP-Rec | 0.2233 | 0.5352 | 0.6559 | 0.3871 | 0.4267 | 0.3699 |
| FEARec | 0.2304 | 0.5590 | 0.7058 | 0.4056 | 0.4548 | 0.3892 |
| SR-DFN | 0.2394 | 0.5775 | 0.7364 | 0.4153 | 0.4668 | 0.3965 |
| MOOCCube | HR@1 | HR@5 | HR@10 | NDCG@5 | NDCG@10 | MRR |
| NeuMF | 0.3510 | 0.5411 | 0.6814 | 0.4095 | 0.4572 | 0.3910 |
| GRU4Rec | 0.6519 | 0.7504 | 0.7671 | 0.7006 | 0.7332 | 0.6888 |
| Caser | 0.6496 | 0.7529 | 0.7711 | 0.7001 | 0.7287 | 0.6902 |
| SASRec | 0.7757 | 0.8364 | 0.8610 | 0.8223 | 0.8381 | 0.8210 |
| BERT4Rec | 0.8006 | 0.9174 | 0.9333 | 0.8597 | 0.8746 | 0.8341 |
| SR-GNN | 0.6701 | 0.7718 | 0.7900 | 0.7345 | 0.7519 | 0.6948 |
| SDGL | 0.8090 | 0.9027 | 0.9218 | 0.8714 | 0.8893 | 0.8775 |
| FMLP-Rec | 0.8445 | 0.9289 | 0.9454 | 0.8924 | 0.8977 | 0.8841 |
| FEARec | 0.8503 | 0.9333 | 0.9495 | 0.9006 | 0.9091 | 0.8900 |
| SR-DFN | 0.8549 | 0.9430 | 0.9579 | 0.9051 | 0.9099 | 0.8957 |
| PEEK | HR@1 | HR@5 | HR@10 | NDCG@5 | NDCG@10 | MRR |
| NeuMF | 0.0822 | 0.2007 | 0.2864 | 0.1839 | 0.2248 | 0.2131 |
| GRU4Rec | 0.1031 | 0.2546 | 0.3323 | 0.2169 | 0.2471 | 0.2138 |
| Caser | 0.3719 | 0.5550 | 0.5879 | 0.4549 | 0.4856 | 0.4513 |
| SASRec | 0.3892 | 0.5596 | 0.5930 | 0.4684 | 0.4921 | 0.4660 |
| BERT4Rec | 0.3217 | 0.5301 | 0.5634 | 0.4417 | 0.4792 | 0.4368 |
| SR-GNN | 0.3171 | 0.5106 | 0.5401 | 0.4508 | 0.4816 | 0.4463 |
| SDGL | 0.3622 | 0.5204 | 0.5731 | 0.4665 | 0.4891 | 0.4602 |
| FMLP-Rec | 0.3953 | 0.5436 | 0.5978 | 0.4754 | 0.4929 | 0.4710 |
| FEARec | 0.4117 | 0.5648 | 0.6006 | 0.4814 | 0.5198 | 0.4989 |
| SR-DFN | 0.4281 | 0.5788 | 0.6248 | 0.5099 | 0.5247 | 0.5027 |
| Yelp | HR@1 | HR@5 | HR@10 | NDCG@5 | NDCG@10 | MRR |
| NeuMF | 0.1846 | 0.5302 | 0.6863 | 0.3527 | 0.4190 | 0.3458 |
| GRU4Rec | 0.2053 | 0.5437 | 0.7265 | 0.3784 | 0.4375 | 0.3630 |
| Caser | 0.2188 | 0.5111 | 0.6661 | 0.3696 | 0.4198 | 0.3595 |
| SASRec | 0.2375 | 0.5745 | 0.7373 | 0.4113 | 0.4642 | 0.3927 |
| BERT4Rec | 0.2405 | 0.5976 | 0.7597 | 0.4252 | 0.4778 | 0.4026 |
| SR-GNN | 0.2176 | 0.5442 | 0.7096 | 0.3860 | 0.4395 | 0.3711 |
| SDGL | 0.2569 | 0.5870 | 0.7005 | 0.4552 | 0.4760 | 0.4002 |
| FMLP-Rec | 0.3312 | 0.6363 | 0.7268 | 0.6363 | 0.5227 | 0.4664 |
| FEARec | 0.3321 | 0.6377 | 0.7278 | 0.6227 | 0.5117 | 0.4454 |
| SR-DFN | 0.2884 | 0.6180 | 0.7283 | 0.4621 | 0.4980 | 0.4340 |
4.3. Influence of Components (RQ2)
To systematically evaluate the contributions of SR-DFN’s core components, we conducted ablation studies through three architectural variants:
4.3.1. Utility of IDD
The ablation study reveals critical insights into the IDD module’s contribution across datasets. Removing the IDD induces performance degradation on MovieLens (NDCG@10 ↓2.56%), MOOCCube (NDCG@10 ↓1.60%), and PEEK (NDCG@10 ↓6.30%), underscoring its efficacy in temporal-domain noise suppression. However, on Yelp—a dataset characterized by ambiguous preferences across a large item pool—the IDD reduces NDCG@10 by 4.60%. This divergence stems from two factors:
Behavioral Ambiguity: Yelp’s sparse interactions (avg. sequence length = 16.7) amplify randomness, diminishing the IDD’s ability to discern clean patterns.
Explicit Learning Context: PEEK’s explicit, short-term learning objectives mitigate behavioral noise despite comparable sequence lengths (avg. = 7.8), enabling effective IDD operation.
While the IDD generally enhances recommendation fidelity, its efficacy is contingent on dataset-specific interaction characteristics. This observation motivates future investigations into adaptive temporal denoising thresholds based on sequence sparsity.
4.3.2. Utility of Fourier Basis
The ablation analysis of the learnable Fourier basis reveals critical performance impacts across datasets. Disabling this component in SR-DFN_2 induces measurable degradation: NDCG@10 decreases by 1.6% on MovieLens and 0.91% on Yelp compared to the full SR-DFN model while maintaining parity on MOOCCube and PEEK. This divergence stems from the Fourier basis’s role in enabling adaptive phase alignment, which enhances spectral denoising flexibility by jointly optimizing amplitude and phase components. Such optimization stabilizes preference signal reconstruction during inverse FFT operations, which is crucial for datasets with complex temporal dynamics (e.g., MovieLens’s long sequences and Yelp’s sparse interactions).
These empirical results validate the theoretical motivation outlined in
Section 1, that is, the concept that phase-aware spectral filtering is essential for disentangling noise from authentic preferences in frequency-domain representations. The retained performance on MOOCCube and PEEK suggests domain-specific robustness where behavioral patterns exhibit stronger periodicity or lower noise variance, reducing phase sensitivity. These results empirically substantiate that the joint amplitude–phase optimization in Equation (
11) outperforms amplitude-only filtering.
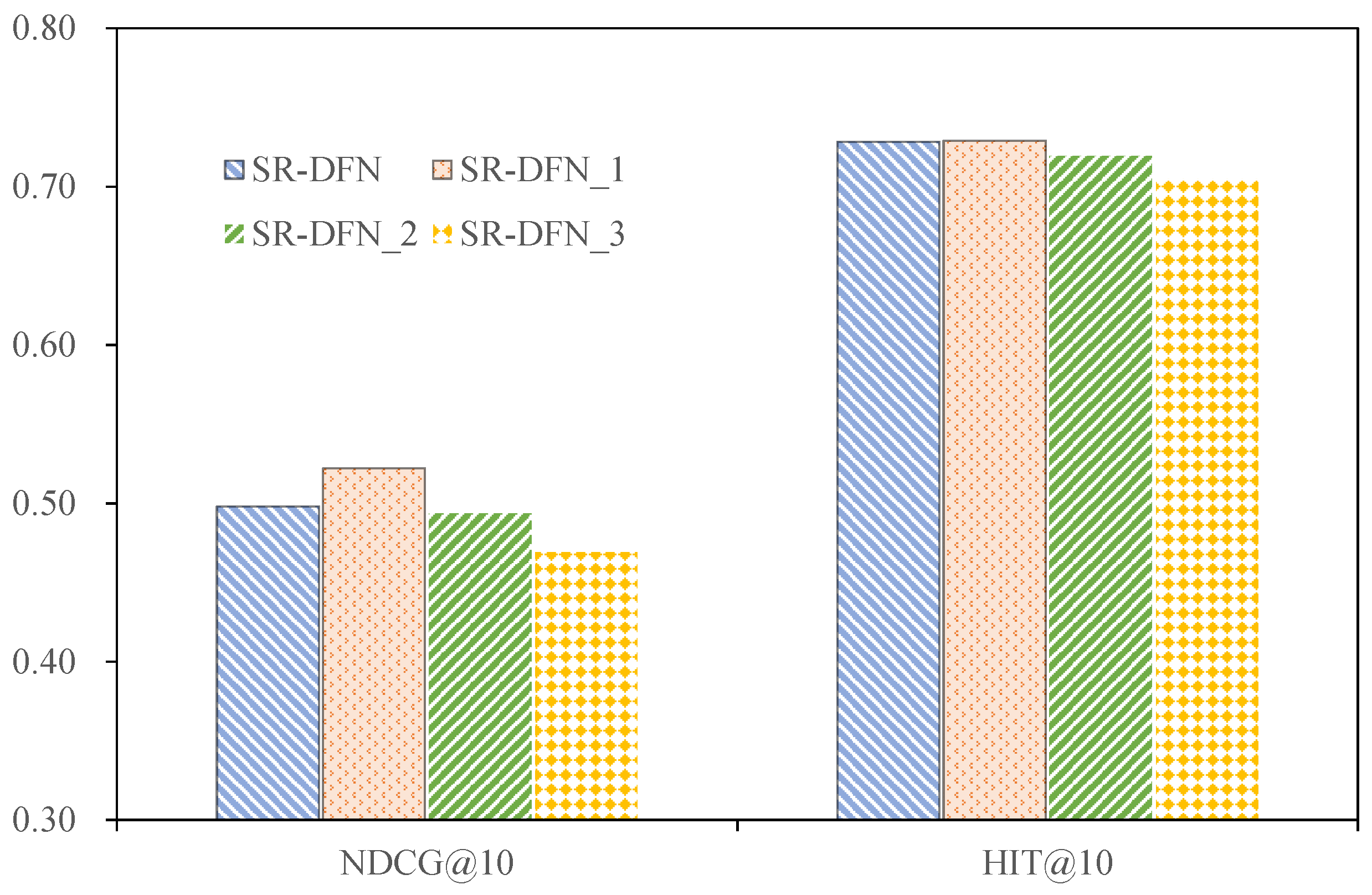
4.3.3. Utility of Position Encoding
The empirical evidence demonstrates that integrating learnable positional encoding into SR-DFN adversely impacts recommendation accuracy across all benchmark datasets. Quantitatively, the inclusion of positional encoding reduces NDCG@10 by 4.41% (MovieLens), 0.24% (MOOCCube), 3.98% (PEEK), and 6.16% (Yelp). This degradation stems from two interrelated factors:
This demonstrates that the implicit periodicity of circular convolution suffices for temporal modeling, while explicit embeddings disrupt frequency-domain coherence.
4.4. Hyperparameter Study (RQ3)
A systematic analysis of two critical hyperparameters influencing SR-DFN’s performance (i.e., the depth of filtering layers in the spectral processing module and the dimensionality of item embeddings) was conducted. Experimental outcomes are presented in
Table 3 (filtering layer analysis) and
Table 4 (embedding dimension analysis). To quantify model robustness under parameter variation conditions, we computed the standard deviation
of each evaluation metric across hyperparameter configurations, where lower
values indicate greater stability.
4.4.1. The Filtering Number
The hyperparameter sensitivity analysis in
Table 3 reveals critical insights into the impact of filtering layer depth on SR-DFN’s performance. When configured with a single filtering layer (
), SR-DFN exhibits suboptimal performance across all datasets, attributable to insufficient hierarchical refinement for disentangling noise from spectral embeddings. Incrementing NN enhances recommendation accuracy, with optimal results achieved at
for MovieLens (NDCG@10: 0.742) and
for MOOCCube (NDCG@10: 0.681), demonstrating the necessity of dataset-specific architectural configurations. Beyond these optima (
), performance plateaus or marginally degrades (MovieLens NDCG@10: −0.8% at
), suggesting over-smoothing or overfitting risks from excessive spectral transformations.
This behavior aligns with the spectral bias of deep networks—shallow architectures underfit high-frequency noise patterns, while overly deep models overfit to training artifacts. The dataset-dependent optimal NN underscores the interplay between sequence complexity (e.g., MovieLens’s long-term dependencies) and spectral processing depth. These findings emphasize the importance of balancing denoising granularity with model parsimony, motivating future research into adaptive layer selection mechanisms for diverse recommendation scenarios.
4.4.2. The Embedding Size
The analysis of embedding dimensionality impacts in
Table 4 reveals dataset-specific optimization requirements. SR-DFN achieves peak performance with an embedding dimension of 64 across most datasets, while MOOCCube necessitates a larger dimensionality of 128 to accommodate its higher interaction complexity. This divergence stems from a critical trade-off: insufficient dimensionality (e.g.,
) constrains the model’s capacity to capture nuanced preference patterns, whereas excessive dimensions (e.g.,
) introduce parameter redundancy, amplifying overfitting risks on noise-contaminated interactions.
Robustness metrics further demonstrate SR-DFN’s stability across configurations, with standard deviations for all evaluation metrics across embedding sizes. This low variance underscores the framework’s resilience to dimensional scaling, maintaining consistent performance despite parametric variations. The observed stability arises from SR-DFN’s dual-domain architecture, which inherently regularizes embeddings through coordinated temporal purification and spectral refinement, mitigating overfitting while preserving generalization capability.
4.5. Convergence Analysis (RQ4)
To examine the convergence properties of SR-DFN, we analyzed its training dynamics with optimized hyperparameter configurations. The modular architecture operates through two coordinated phases: the item denoising distiller (IDD) distills clean interactions from implicit feedback, while the embedding denoising encoder (EDE) learns purified item embeddings from the refined sequences. We tracked the EDE module’s training loss alongside testing metrics (HR@5, NDCG@5, MRR) across four datasets, as illustrated in
Figure 6,
Figure 7,
Figure 8 and
Figure 9. From these figures, we can see that the training process of SR-DFN can converge in about 40, 50, 70, and 100 rounds for MovieLens, MOOCCUbe, PEEK, and Yelp datasets, respectively.
These results demonstrate SR-DFN’s capacity to efficiently assimilate training signals while suppressing noise propagation through hierarchical spectral filtering. The progressive attenuation of training loss correlates with metric improvements, validating the framework’s dual-phase denoising efficacy. The extended convergence duration for Yelp aligns with its shorter average sequence length and higher noise prevalence, necessitating extended optimization cycles to disentangle sparse preference signals. This empirical validation confirms that SR-DFN’s stacked filtering layers effectively balance model capacity with noise resilience.
4.6. Limitations
Frequency-domain processing inherently discards explicit positional information; however, our research outcomes challenge the conventional belief regarding the necessity of positional encoding in spectral methods. Through the theoretical analysis presented in
Section 4.3.3, we have verified that circular convolution operations during frequency-domain filtering can implicitly maintain sequence order, thereby rendering explicit positional embeddings seemingly unnecessary.
This discovery opens up a new research avenue: devising frequency-compatible positional encoding mechanisms that harmonize with spectral transformations while preventing excessive parameter growth. Possible strategies include phase modulation or the introduction of frequency-bin-specific positional biases, which may strike a balance between preserving temporal order and ensuring spectral efficiency. Since this exploration extends beyond the current study’s focus on dual-domain denoising, we plan to pursue it in future research.
Additionally, we recognize the potential significance of absolute and relative positions in non-periodic sequences. In upcoming investigations, we aim to conduct in-depth analyses, potentially integrating concepts from information theory and signal processing to precisely define the role of positional embeddings in frequency-domain-based recommendation models. Moreover, we intend to combine adaptive spectral thresholds with auxiliary signals, such as temporal intervals, to address noise separation in non-periodic situations for sparse datasets.
5. Conclusions
In this work, we presented SR-DFN, which simultaneously denoises implicit feedback through coordinated denoising in both the time and frequency domains. To perform item-level denoising, a model-agnostic item denoising distiller selects the clean interactions in the time domain in a self-guided manner. Then, an embedding denoising encoder incorporating learnable filters and a trainable basis in the frequency domain attenuates noise information to extract purer user preferences. The experimental results confirm our insights that the item position encoding in the embedding denoising encoder is parameter-redundant and degrades the recommendation performance. One merit of SR-DFN is that the item denoising distiller and the embedding denoising encoder are decoupled, which opens up the research space of denoising implicit feedback for sequential recommendations. Experiments on four real-world datasets showed that our SR-DFN achieves competitive recommendation accuracy compared with several representative recommended methods. The symmetry principles underlying our dual-domain approach demonstrated their effectiveness in balancing temporal sequence processing with spectral analysis, leading to more robust recommendation performance.
In future work, we intend to advance SR-DFN in the following directions: Following the frequency principle [
15], a valuable contribution would be to explore a better stop training mechanism with additional information. The learnable item position encoding leads to parameter redundancy, resulting in the degradation of recommendation performance. However, the item position information is lost when sequential recommendations are performed in the frequency domain. Accordingly, we will consider introducing position information for the sequential recommendation in the frequency domain, such as modeling coarse-grained position information in the form of a sliding window. In addition, future work should explore additional applications of symmetry principles in recommendation systems, particularly in the context of graph-based methods where structural symmetries in user–item interactions could be exploited for more efficient and accurate recommendations.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}