
Frequency Stability Constrained Unit Commitment Considering Control Mode Transition of Renewable Generations

Abstract
1. Introduction
- (1)
- A novel FSCUC model is proposed while considering the control mode transition of RGs, which can significantly improve the system frequency stability.
- (2)
- The dynamic frequency behaviors with FR and MPPT modes of RGs are modeled and further transformed as the linear algebraic formulation through a Zero-Order Hold (ZOH) discretization technique to improve the compatibility with the UC model.
- (3)
- A progressive inertia increment (PII)-based solution algorithm is designed to decouple the UC, and the frequency stability models, thereby reducing the computational burden significantly.
2. Mathematical Formulation
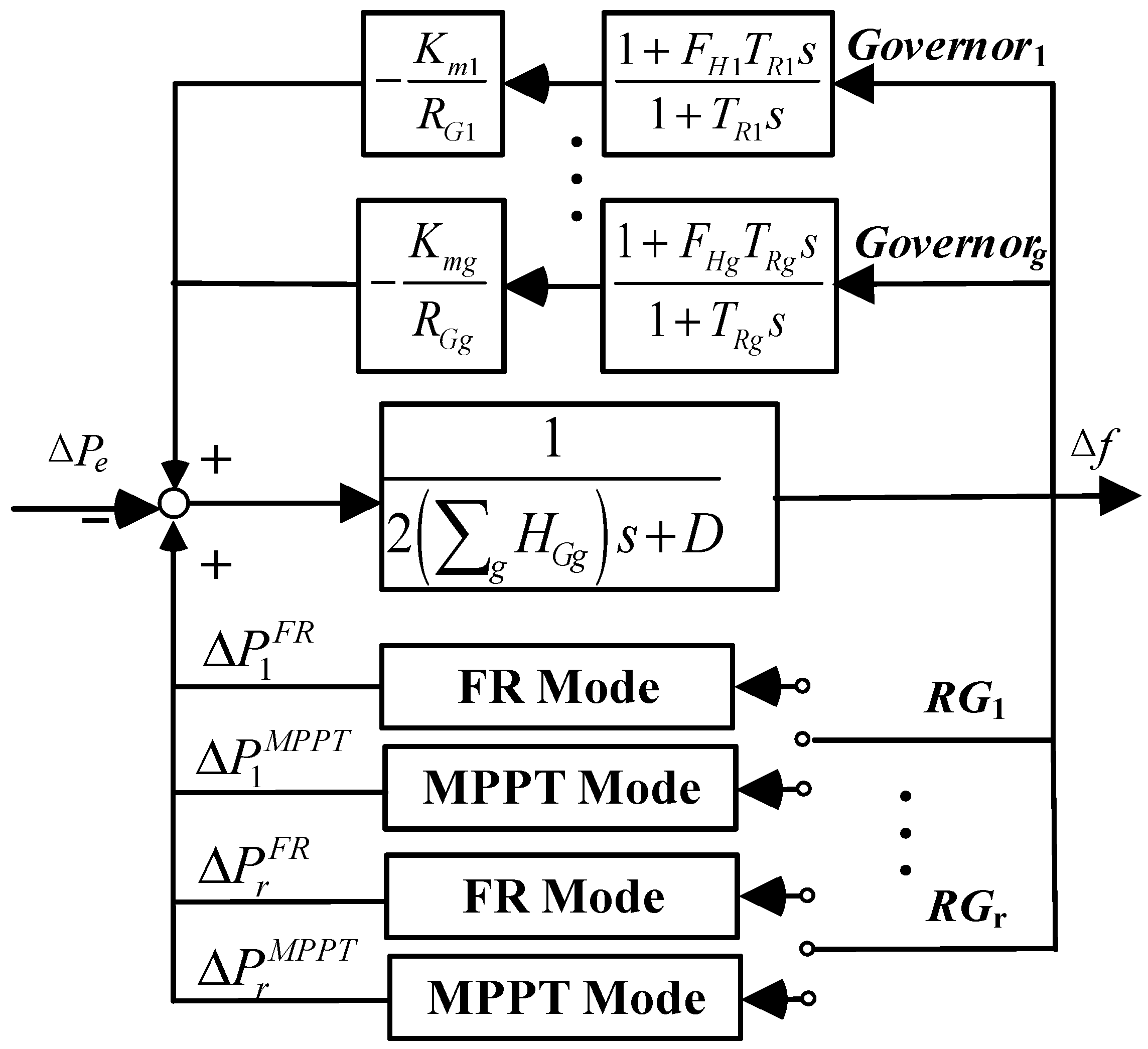
2.1. Frequency Dynamics Modeling
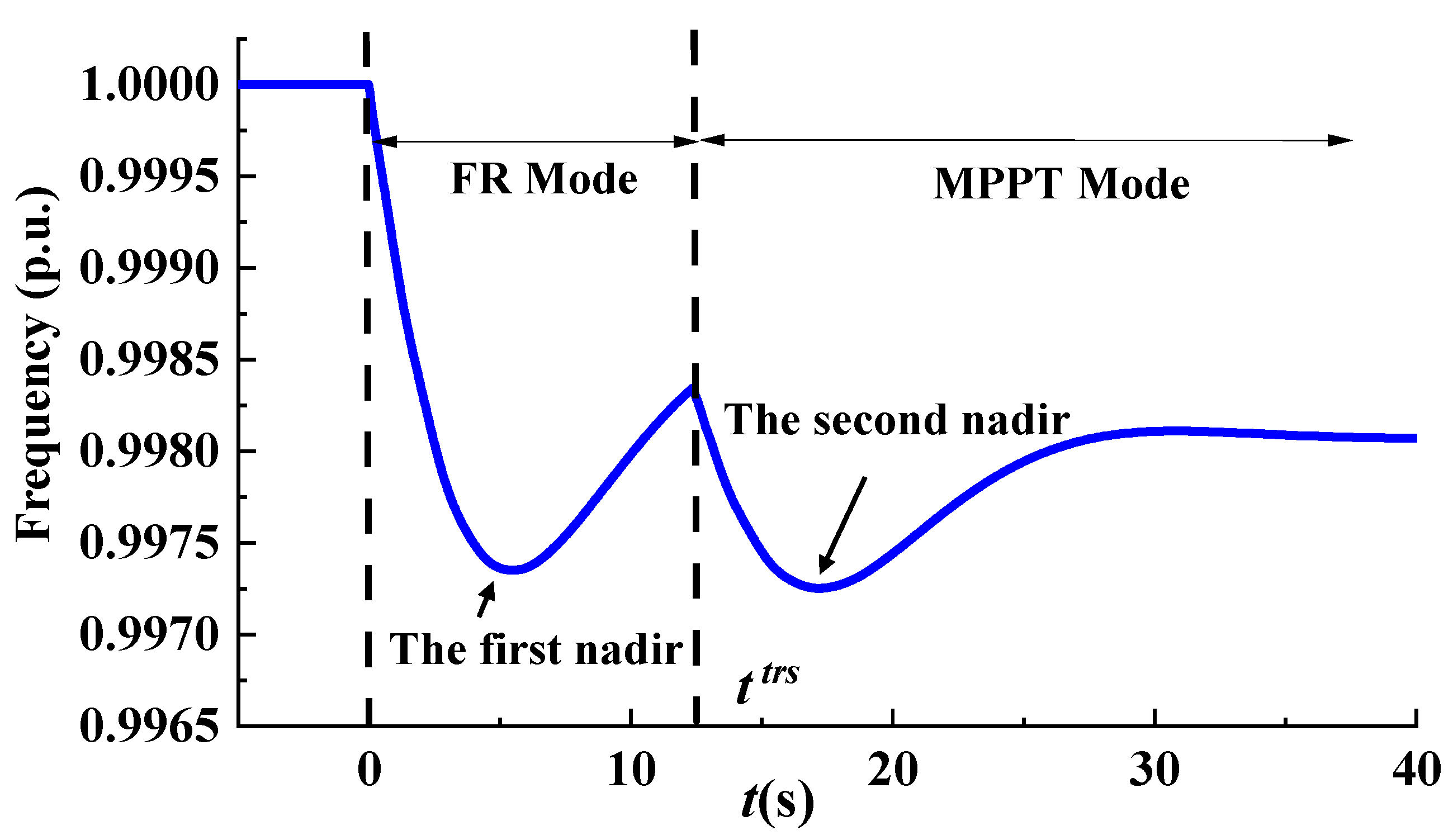
2.1.1. Control Mode Transition of RGs
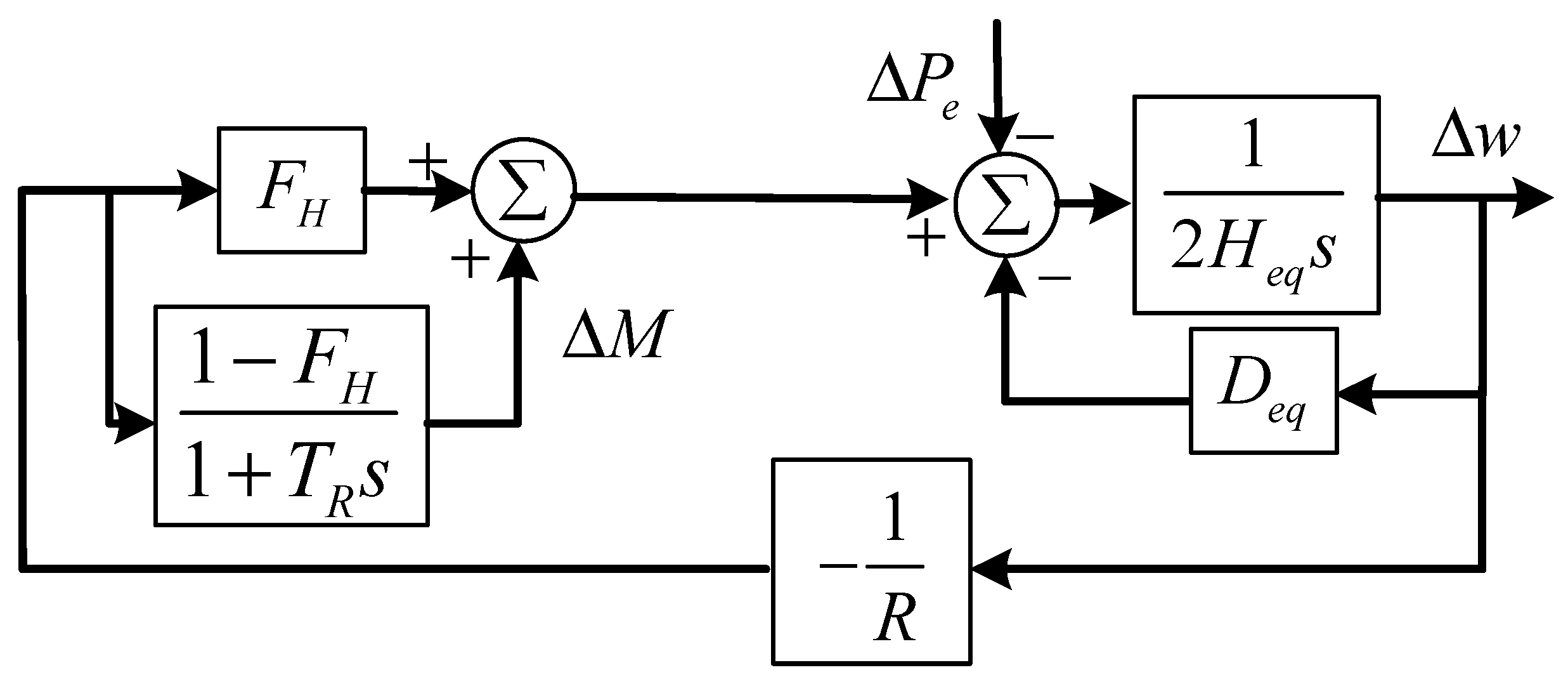
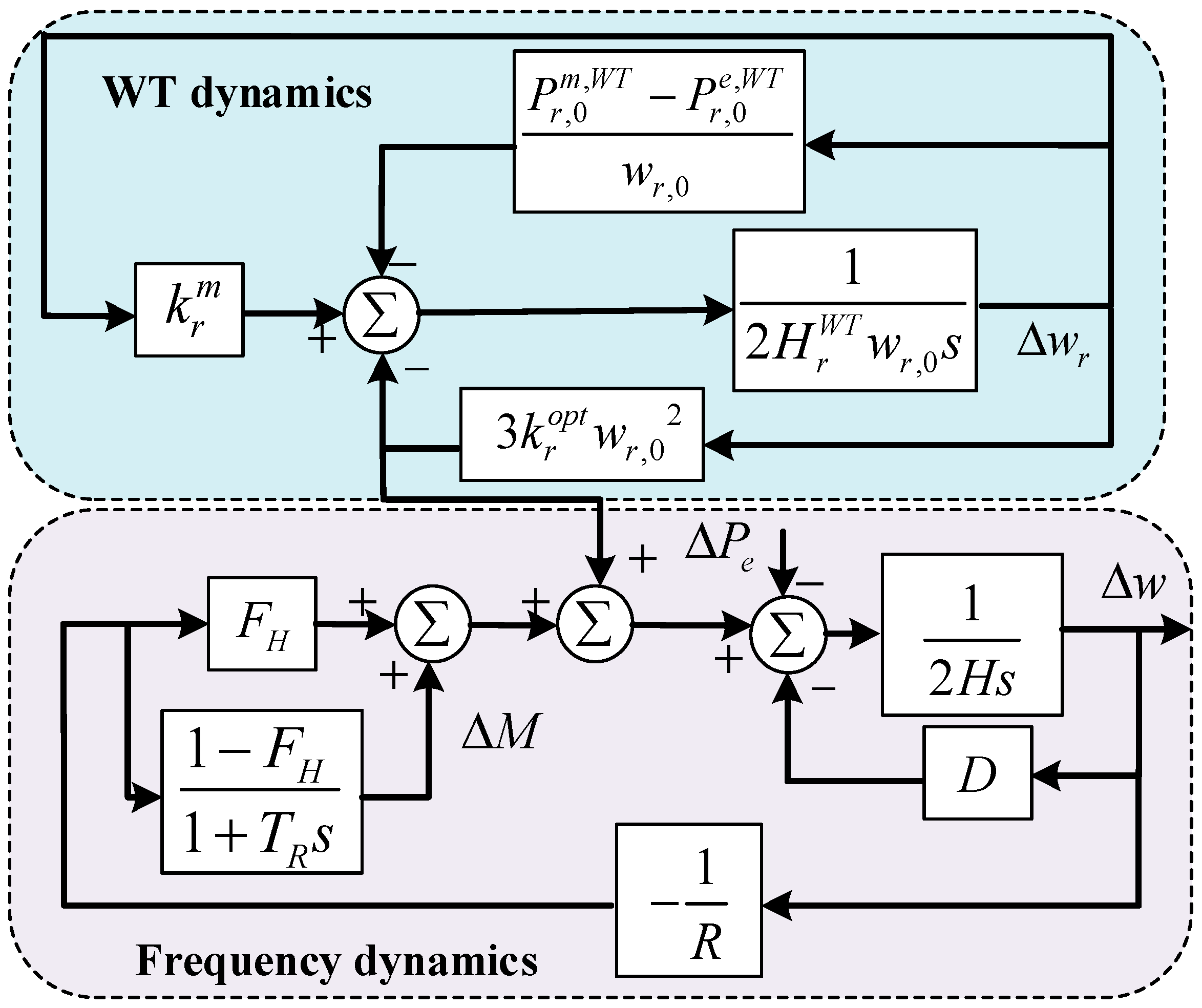
2.1.2. Frequency Dynamic Modeling
- (1)
- (2)
- The nonlinear dynamic model of WTs will be linearized through Taylor series to generate a linear time-invariant prediction model in the following text.
- (3)
- The frequency response of other components, such as loads and storages, are not considered in this paper. However, these frequency response models can be conveniently integrated into the system frequency model under the proposed analysis structure.
2.1.3. Model Discretization
2.2. Unit Commitment Model
2.2.1. Objective Function
2.2.2. Power Balance Constraints
2.2.3. Power Output Constraints
2.2.4. Startup and Shutdown Constraints
2.2.5. Ramping Constraints
2.2.6. Frequency Dynamic Constraints
3. Solution Method
| Algorithm 1: PII-based solution algorithm |
| Initialization: Set the iterative index Set the frequency-instability periods . Repeat: 1. Solve UC problem Solve UC problem (33) and obtain the cost-optimal UC solution . 2. Check the Frequency Stability Check the frequency stability through the model (34) using ; Obtain frequency stability index and system inertia . 3. Check Convergence Condition If : set ; kk + 1; Go to Step 1. Else: Terminate the algorithm. |
4. Case Studies
4.1. IEEE 24-Bus System
4.2. IEEE 118-Bus System
5. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FR | Frequency regulation |
| FSCUC | Frequency stability constrained unit commitment |
| MPPT | Maximum power point tracking |
| PII | Progressive inertia increment |
| RG | Renewable generation |
| SG | Synchronous generation |
| UC | Unit commitment |
| WT | Wind turbine |
| ZOH | Zero-Order Hold |
Appendix A
Appendix B
References
- Kheshti, M.; Ding, L.; Bao, W.; Yin, M.; Wu, Q.; Terzija, V. Toward Intelligent Inertial Frequency Participation of Wind Farms for the Grid Frequency Control. IEEE Trans. Ind. Inform. 2020, 16, 6772–6786. [Google Scholar] [CrossRef]
- Morren, J.; Haan, S.W.H.d.; Kling, W.L.; Ferreira, J.A. Wind turbines emulating inertia and supporting primary frequency control. IEEE Trans. Power Syst. 2006, 21, 433–434. [Google Scholar] [CrossRef]
- Kou, P.; Liang, D.; Yu, L.; Gao, L. Nonlinear Model Predictive Control of Wind Farm for System Frequency Support. IEEE Trans. Power Syst. 2019, 34, 3547–3561. [Google Scholar] [CrossRef]
- Conroy, J.F.; Watson, R. Frequency Response Capability of Full Converter Wind Turbine Generators in Comparison to Conventional Generation. IEEE Trans. Power Syst. 2008, 23, 649–656. [Google Scholar] [CrossRef]
- Bao, W.; Wu, Q.; Ding, L.; Huang, S.; Terzija, V. A Hierarchical Inertial Control Scheme for Multiple Wind Farms with BESSs Based on ADMM. IEEE Trans. Sustain. Energy 2021, 12, 751–760. [Google Scholar] [CrossRef]
- Xu, Y.; Dong, Z.; Li, Z.; Liu, Y.; Ding, Z. Distributed Optimization for Integrated Frequency Regulation and Economic Dispatch in Microgrids. IEEE Trans. Smart Grid 2021, 12, 4595–4606. [Google Scholar] [CrossRef]
- Wang, L.; Yang, Y.; Gu, H.; Zhang, Y.; Wei, C.; Cheng, S. Bottleneck Generator Identification and the Corresponding N-1 Frequency Security Constrained Intraday Generator Dispatch. IEEE Trans. Power Syst. 2023, 38, 739–752. [Google Scholar] [CrossRef]
- Alex, N.F.; Gómez, J.S.; Llanos, J.; Rute, E.; Sáez, D.; Sumner, M. Distributed Predictive Control Strategy for Frequency Restoration of Microgrids Considering Optimal Dispatch. IEEE Trans. Smart Grid 2021, 12, 2748–2759. [Google Scholar]
- Troxell, D.; Ahn, M.; Gangammanavar, H. A Cardinality Minimization Approach to Security-Constrained Economic Dispatch. IEEE Trans. Power Syst. 2022, 37, 3642–3652. [Google Scholar] [CrossRef]
- Ahmadi, A.; Nezhad, A.E.; Hredzak, B. Security-Constrained Unit Commitment in Presence of Lithium-Ion Battery Storage Units Using Information-Gap Decision Theory. IEEE Trans. Ind. Inform. 2019, 15, 148–157. [Google Scholar] [CrossRef]
- Li, H.; Zhang, H.; Liu, D.; Zhang, J.; Wong, C.K. Frequency-Constrained Dispatching for an Integrated Electricity-Heat Microgrid With Synergic Regulation Resources. IEEE Trans. Ind. Appl. 2025, 61, 2203–2215. [Google Scholar] [CrossRef]
- Qi, X.; Zhao, T.; Liu, X.; Wang, P. Three-Stage Stochastic Unit Commitment for Microgrids Toward Frequency Security via Renewable Energy Deloading. IEEE Trans. Smart Grid 2023, 14, 4256–4267. [Google Scholar] [CrossRef]
- Cai, S.; Xie, Y.; Zhang, Y.; Bao, W.; Wu, Q.; Chen, C.; Guo, J. Frequency Constrained Proactive Scheduling for Secure Microgrid Formation in Wind Power Penetrated Distribution Systems. IEEE Trans. Smart Grid 2025, 16, 989–1002. [Google Scholar] [CrossRef]
- Yang, L.; Li, H.; Zhang, H.; Wu, Q.; Cao, X. Stochastic-Distributionally Robust Frequency-Constrained Optimal Planning for an Isolated Microgrid. IEEE Trans. Sustain. Energy 2024, 15, 2155–2169. [Google Scholar] [CrossRef]
- She, B.; Li, F.; Cui, H.; Wang, J.; Zhang, Q.; Bo, R. Virtual Inertia Scheduling (VIS) for Real-Time Economic Dispatch of IBR-Penetrated Power Systems. IEEE Trans. Sustain. Energy 2024, 15, 938–951. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, R.; Bi, T. Energy Management of Distribution-Level Integrated Electric-Gas Systems With Fast Frequency Reserve. IEEE Trans. Power Syst. 2024, 39, 4208–4223. [Google Scholar] [CrossRef]
- Cai, S.; Xie, Y.; Zhang, Y.; Zhang, M.; Wu, Q.; Guo, J. A Simulation-Assisted Proactive Scheduling Method for Secure Microgrid Formation Under Static and Transient Islanding Constraints. IEEE Trans. Smart Grid 2024, 15, 272–285. [Google Scholar] [CrossRef]
- Javadi, M.; Gong, Y.; Chung, C.Y. Frequency Stability Constrained BESS Sizing Model for Microgrids. IEEE Trans. Power Syst. 2024, 39, 2866–2878. [Google Scholar] [CrossRef]
- Zhang, Q.; Ma, Z.; Zhu, Y.; Wang, Z. A Two-Level Simulation-Assisted Sequential Distribution System Restoration Model With Frequency Dynamics Constraints. IEEE Trans. Smart Grid 2021, 12, 3835–3846. [Google Scholar] [CrossRef]
- Xu, T.; Jang, W.; Overbye, T. Commitment of Fast-Responding Storage Devices to Mimic Inertia for the Enhancement of Primary Frequency Response. IEEE Trans. Power Syst. 2018, 33, 1219–1230. [Google Scholar] [CrossRef]
- Hao, L.; Ji, J.; Xie, D.; Wang, H.; Li, W.; Asaah, P. Scenario-based Unit Commitment Optimization for Power System with Large-scale Wind Power Participating in Primary Frequency Regulation. J. Mod. Power Syst. Clean Energy 2020, 8, 1259–1267. [Google Scholar] [CrossRef]
- Javadi, M.; Gong, Y.; Chung, C.Y. Frequency Stability Constrained Microgrid Scheduling Considering Seamless Islanding. IEEE Trans. Power Syst. 2022, 37, 306–316. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, F.; Ding, L.; Meng, K.; Dong, Z.Y. Wind Farm Level Coordination for Optimal Inertial Control with a Second-Order Cone Predictive Model. IEEE Trans. Sustain. Energy 2021, 12, 2353–2366. [Google Scholar] [CrossRef]
- Zhao, X.; Wei, H.; Qi, J.; Li, P.; Bai, X. Frequency Stability Constrained Optimal Power Flow Incorporating Differential Algebraic Equations of Governor Dynamics. IEEE Trans. Power Syst. 2021, 36, 1666–1676. [Google Scholar] [CrossRef]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Wen, Y.; Li, W.; Huang, G.; Liu, X. Frequency Dynamics Constrained Unit Commitment With Battery Energy Storage. IEEE Trans. Power Syst. 2016, 31, 5115–5125. [Google Scholar] [CrossRef]
- Badesa, L.; Teng, F.; Strbac, G. Simultaneous Scheduling of Multiple Frequency Services in Stochastic Unit Commitment. IEEE Trans. Power Syst. 2019, 34, 3858–3868. [Google Scholar] [CrossRef]
- Yang, Y.; Peng, J.C.H.; Ye, C.; Ye, Z.S.; Ding, Y. A Criterion and Stochastic Unit Commitment Towards Frequency Resilience of Power Systems. IEEE Trans. Power Syst. 2022, 37, 640–652. [Google Scholar] [CrossRef]
- Zhang, Z.; Du, E.; Teng, F.; Zhang, N.; Kang, C. Modeling Frequency Dynamics in Unit Commitment With a High Share of Renewable Energy. IEEE Trans. Power Syst. 2020, 35, 4383–4395. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, L.; Cheng, H.; Liu, D.; Zhang, J.; Li, G. Frequency-constrained Co-planning of Generation and Energy Storage with High-penetration Renewable Energy. J. Mod. Power Syst. Clean Energy 2021, 9, 760–775. [Google Scholar] [CrossRef]
- Paturet, M.; Markovic, U.; Delikaraoglou, S.; Vrettos, E.; Aristidou, P.; Hug, G. Stochastic Unit Commitment in Low-Inertia Grids. IEEE Trans. Power Syst. 2020, 35, 3448–3458. [Google Scholar] [CrossRef]
- Shi, Q.; Li, F.; Cui, H. Analytical Method to Aggregate Multi-Machine SFR Model with Applications in Power System Dynamic Studies. IEEE Trans. Power Syst. 2018, 33, 6355–6367. [Google Scholar] [CrossRef]
- Luo, F.; Bu, Q.; Ye, Z.; Yuan, Y.; Gao, L.; Lv, P. Dynamic Reconstruction Strategy of Distribution Network Based on Uncertainty Modeling and Impact Analysis of Wind and Photovoltaic Power. IEEE Access 2024, 12, 64069–64078. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time (h) | RoCoF (Hz/s) | (Hz) | (Hz) | H (s) |
|---|---|---|---|---|
| 1 | 0.1452 | 0.1716 | 0.0922 | 172.185 |
| 2 | 0.1452 | 0.1718 | 0.0922 | 172.185 |
| 3 | 0.1452 | 0.1726 | 0.092 | 172.185 |
| 4 | 0.1441 | 0.1722 | 0.0911 | 173.485 |
| 5 | 0.1441 | 0.1736 | 0.0909 | 173.485 |
| 6 | 0.1629 | 0.1987 | 0.1027 | 153.465 |
| 7 | 0.1629 | 0.1944 | 0.1036 | 153.465 |
| 8 | 0.1629 | 0.1905 | 0.1044 | 153.465 |
| 9 | 0.1629 | 0.1894 | 0.1046 | 153.465 |
| 10 | 0.1629 | 0.1895 | 0.1046 | 153.465 |
| 11 | 0.1629 | 0.1886 | 0.1048 | 153.465 |
| 12 | 0.1629 | 0.1864 | 0.1052 | 153.465 |
| 13 | 0.1629 | 0.1846 | 0.1056 | 153.465 |
| 14 | 0.1629 | 0.1837 | 0.1058 | 153.465 |
| 15 | 0.1629 | 0.1841 | 0.1057 | 153.465 |
| 16 | 0.1629 | 0.1849 | 0.1055 | 153.465 |
| 17 | 0.1629 | 0.1855 | 0.1054 | 153.465 |
| 18 | 0.1629 | 0.1864 | 0.1052 | 153.465 |
| 19 | 0.1629 | 0.1884 | 0.1049 | 153.465 |
| 20 | 0.1629 | 0.1899 | 0.1045 | 153.465 |
| 21 | 0.1629 | 0.1922 | 0.1041 | 153.465 |
| 22 | 0.1629 | 0.1936 | 0.1037 | 153.465 |
| 23 | 0.1629 | 0.195 | 0.1035 | 153.465 |
| 24 | 0.1629 | 0.1959 | 0.1033 | 153.465 |
| Sampling Time | (Hz) | (s) | |||
|---|---|---|---|---|---|
| t = 4 h | t = 14 h | t = 21 h | t = 24 h | ||
| 0.1 s | 0.9396 | 0.4560 | 0.5613 | 0.7779 | 46 |
| 0.2 s | 2.1760 | 1.0419 | 1.2941 | 1.7954 | 39 |
| 0.3 s | 3.4907 | 1.1122 | 1.6203 | 2.6934 | 37 |
| 0.4 s | 4.9052 | 1.1887 | 1.8616 | 3.6669 | 34 |
| Cost ($) | MaxRoCoF (Hz/s) | (Hz) | (Hz) | |
|---|---|---|---|---|
| N-FS | 1,981,075 | 0.3075 (×) | 0.4300 (×) | 0.1920 (×) |
| N-MT | 1,982,475 | 0.2316 (×) | 0.3050 (×) | 0.1463 (√) |
| FSCUC | 1,994,200 | 0.1629 (√) | 0.1987 (√) | 0.1058 (√) |
| Time (h) | RoCoF (%) | (%) | (%) | H (%) |
|---|---|---|---|---|
| 1 | 52.77 | 58.96 | 52.02 | 111.75 |
| 2 | 52.77 | 58.98 | 52.00 | 111.75 |
| 3 | 52.77 | 59.05 | 51.95 | 111.75 |
| 4 | 53.12 | 59.51 | 52.23 | 113.35 |
| 5 | 53.12 | 59.62 | 52.14 | 113.35 |
| 6 | 33.89 | 38.93 | 33.20 | 51.25 |
| 7 | 29.66 | 33.93 | 29.20 | 42.14 |
| 8 | 12.70 | 14.56 | 12.58 | 14.56 |
| 9 | 12.70 | 14.52 | 12.59 | 14.56 |
| 10 | 12.70 | 14.52 | 12.59 | 14.56 |
| 11 | 12.70 | 14.48 | 12.6 | 14.56 |
| 12 | 12.70 | 14.39 | 12.64 | 14.56 |
| 13 | 12.70 | 14.32 | 12.68 | 14.56 |
| 14 | 12.70 | 14.28 | 12.68 | 14.56 |
| 15 | 12.70 | 14.3 | 12.68 | 14.56 |
| 16 | 12.70 | 14.33 | 12.67 | 14.56 |
| 17 | 12.70 | 14.37 | 12.66 | 14.56 |
| 18 | 11.03 | 12.48 | 10.96 | 12.38 |
| 19 | 12.70 | 14.48 | 12.61 | 14.56 |
| 20 | 12.70 | 14.53 | 12.58 | 14.56 |
| 21 | 12.70 | 14.61 | 12.54 | 14.56 |
| 22 | 16.93 | 19.51 | 16.69 | 20.40 |
| 23 | 33.89 | 38.69 | 33.36 | 51.25 |
| 24 | 33.89 | 38.76 | 33.32 | 51.25 |
| Cost ($) | MaxRoCoF (Hz/s) | (Hz) | (Hz) | |
|---|---|---|---|---|
| N-FS | 5,367,100 | 0.2346 (×) | 0.2811 (×) | 0.1526 (×) |
| N-MT | 5,400,060 | 0.2071 (×) | 0.2451 (×) | 0.1344 (√) |
| FSCUC | 5,539,235 | 0.1740 (√) | 0.1938 (√) | 0.1129 (√) |
| Time (h) | RoCoF (%) | (%) | (%) | H (%) |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 0 | 0 |
| 3 | 0 | 0 | 0 | 0 |
| 4 | 0 | 0 | 0 | 0 |
| 5 | 0 | 0 | 0 | 0 |
| 6 | 23.11 | 26.20 | 22.74 | 30.06 |
| 7 | 23.11 | 26.07 | 22.79 | 30.06 |
| 8 | 23.11 | 25.78 | 22.94 | 30.06 |
| 9 | 30.13 | 33.32 | 30.00 | 43.14 |
| 10 | 28.28 | 31.26 | 28.19 | 39.43 |
| 11 | 28.28 | 31.16 | 28.22 | 39.43 |
| 12 | 28.28 | 31.14 | 28.23 | 39.43 |
| 13 | 27.03 | 29.75 | 27.00 | 37.04 |
| 14 | 27.03 | 29.66 | 27.02 | 37.04 |
| 15 | 27.03 | 29.67 | 27.03 | 37.04 |
| 16 | 27.03 | 29.73 | 27.01 | 37.04 |
| 17 | 19.39 | 21.43 | 19.35 | 24.05 |
| 18 | 20.42 | 22.66 | 20.34 | 25.65 |
| 19 | 20.42 | 22.71 | 20.31 | 25.65 |
| 20 | 22.88 | 25.55 | 22.69 | 29.66 |
| 21 | 22.88 | 25.64 | 22.65 | 29.66 |
| 22 | 22.88 | 25.80 | 22.56 | 29.66 |
| 23 | 29.47 | 33.23 | 29.02 | 41.79 |
| 24 | 29.47 | 33.30 | 28.99 | 41.79 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Iteration 1 | ||||||||||||||||||||||||
| Iteration 2 | ||||||||||||||||||||||||
| Iteration 3 | ||||||||||||||||||||||||
| Iteration 4 | ||||||||||||||||||||||||
| Iteration 5 | ||||||||||||||||||||||||
| Iteration 6 |
 indicates the frequency-instability periods.
indicates the frequency-instability periods.  indicates the frequency-stability periods.
indicates the frequency-stability periods.| Proposed PII-Based Method | Direct Solution | |||
|---|---|---|---|---|
| Model (33) | Model (34) | Total | ||
| Time | 186 s | 128 s | 314 s | 10 h |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, F.; Gao, L.; Wu, S. Frequency Stability Constrained Unit Commitment Considering Control Mode Transition of Renewable Generations. Symmetry 2025, 17, 752. https://doi.org/10.3390/sym17050752
Yang F, Gao L, Wu S. Frequency Stability Constrained Unit Commitment Considering Control Mode Transition of Renewable Generations. Symmetry. 2025; 17(5):752. https://doi.org/10.3390/sym17050752
Chicago/Turabian StyleYang, Futao, Lixue Gao, and Shouyuan Wu. 2025. "Frequency Stability Constrained Unit Commitment Considering Control Mode Transition of Renewable Generations" Symmetry 17, no. 5: 752. https://doi.org/10.3390/sym17050752
APA StyleYang, F., Gao, L., & Wu, S. (2025). Frequency Stability Constrained Unit Commitment Considering Control Mode Transition of Renewable Generations. Symmetry, 17(5), 752. https://doi.org/10.3390/sym17050752