In this section, the algorithm proposed in this paper is applied to a maneuverable spacecraft OD case: orbit maintenance of a Near Rectilinear Halo Orbit (NRHO) near L2 in the Cislunar system. It is worth noting that the proposed method is universal and can theoretically be applied to various scenarios, such as orbit determination for Low Earth Orbit (LEO) or Medium Earth Orbit (MEO) satellites, as well as near-Earth space rendezvous and docking missions. Additionally, the measurement model is versatile and can accommodate observations from GNSS satellites or other emerging navigation constellations. However, considering that cislunar space missions have become a focal point of exploration in recent years, and as the dynamics in this region exhibit strong nonlinearity and unique characteristics that impose higher demands on OD algorithms, we chose to demonstrate the effectiveness of the proposed method in this challenging context. Specifically, the ASNC OD method was applied to the OD of an impulsive maneuvering spacecraft. Equation (
1) was set to the circular restricted three-body dynamics, and the measurement information considered both angle-with-range and angle-only observations. The performance of the proposed algorithm was compared with that of STF and PAM.
4.1. Scenario Design
For a spacecraft in an NRHO near L2 in the cislunar system, to simplify and clarify the problem description, its state vector
is defined under the Circular Restricted Three-Body Problem (CRTBP), with
representing the velocity of the target spacecraft, and
representing its position. The differential equation for the state vector of the target spacecraft can be described as
where
is the potential function, which only depends on position and is expressed as
In Equation (
39),
represents the position vector of the spacecraft relative to the Earth in the rotating reference frame, and
represents its position vector relative to the Moon. In Equation (
40),
and
are the gravitational constants of the Earth and Moon.
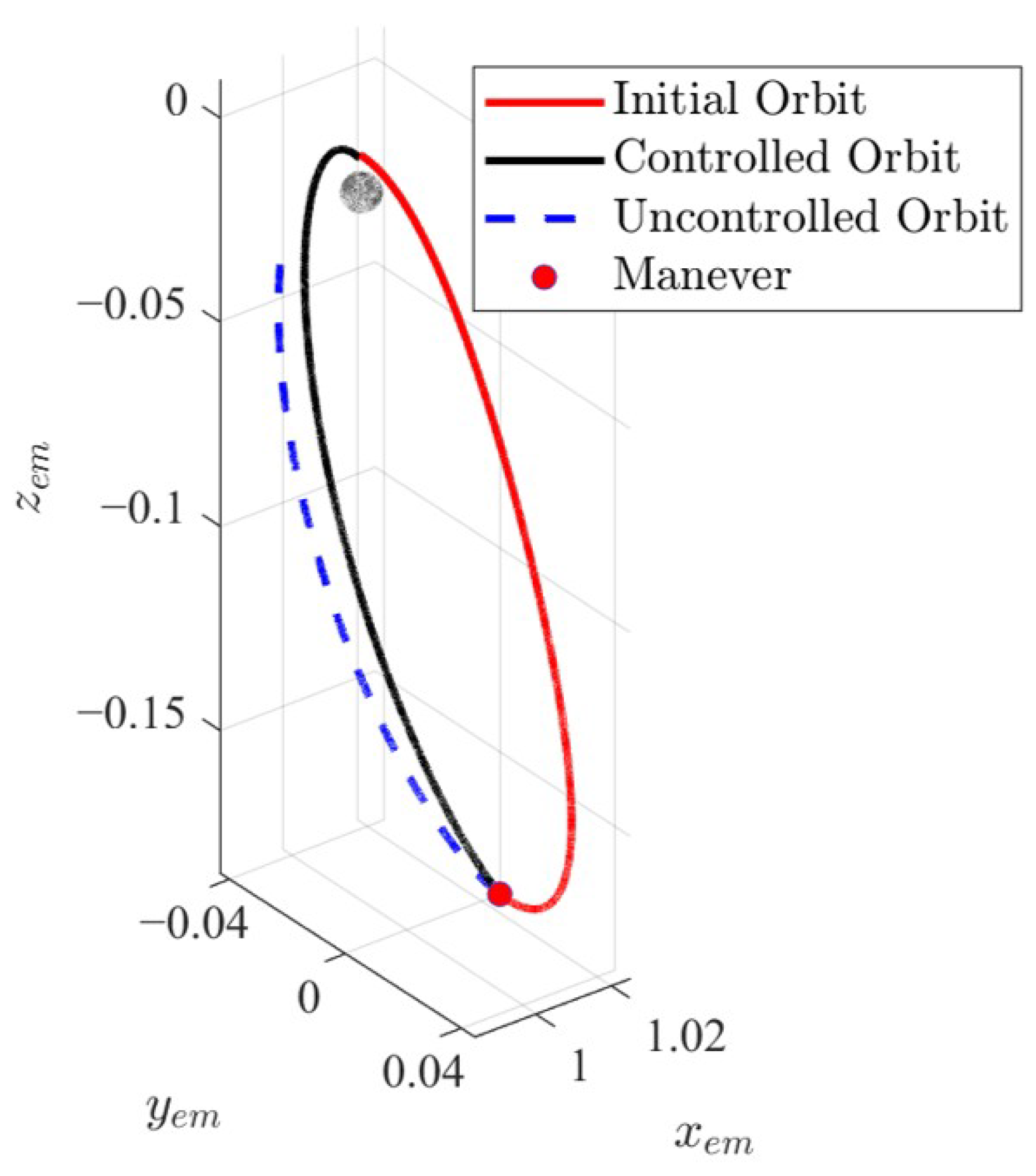
In this example, the cislunar space dynamical environment is complex, and the spacecraft in an NRHO experiences long arcs near the second primary body, leading to instability in the NRHO. Moreover, the NRHO is influenced by the gravitational forces of both the Earth and the Moon, making orbit maintenance necessary. Since the spacecraft moves faster near perilune, maneuvers are typically performed near apolune where fuel consumption is lower. Under the CRTBP model, the initial orbital data are shown in
Table 1, and the apolune orbit maintenance is shown in
Figure 2. After 3.3163 days from the start of the simulation, the target spacecraft performed an impulsive maneuver with a velocity of 34.5770 m/s, completing the designated orbit maintenance mission. This was a significant impulsive maneuver, placing higher demands on the OD algorithm’s performance.
The total OD period was set to be 6 days, with a 6-min measurement interval. The initial position and velocity are given in
Table 1, and the unnormalized initial error covariance matrix is
The measurement information was obtained from the observation constellation at the cislunar libration points, specifically the
binary observation constellation in the cislunar system.
Table 2 gives the specific orbit types and configuration parameters of the observation constellation, and
Table 3 gives the initial position and velocity.
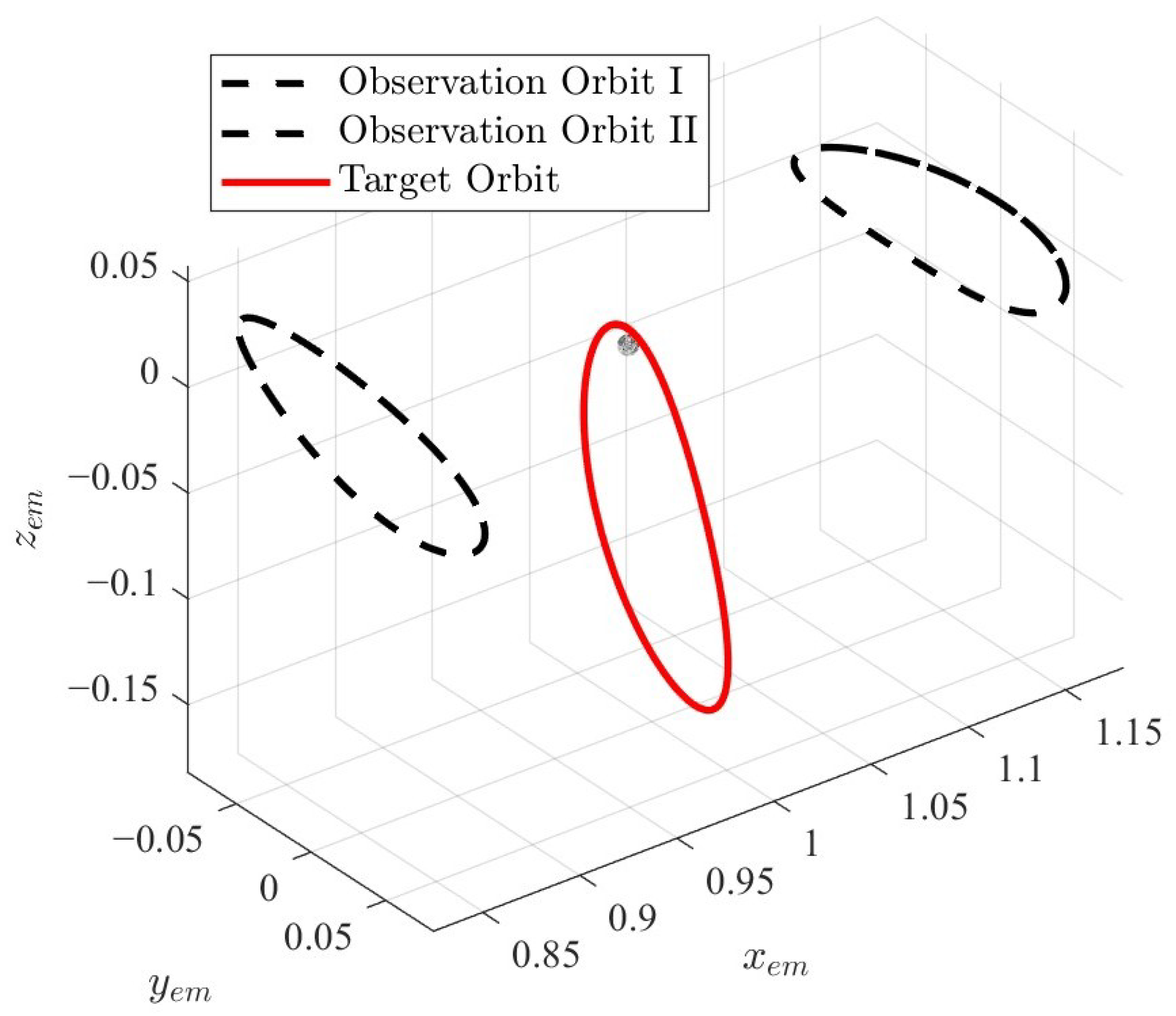
Figure 3 gives a schematic of the observation and target orbits. Since the
binary observation constellation in the cislunar system is the simplest constellation for the OD system in cislunar space, offering comprehensive coverage and a simple configuration, both angle-with-range and angle-only measurements were used as measurements to evaluate the performance of the proposed algorithm based on the observation constellation given in
Figure 3.
4.2. Angle-with-Range Observation
The angle-with-range measurements of the target spacecraft obtained from the binary observation constellation sensors are given as
where
.
and
are the position vectors of the observation spacecraft on the observation orbit I and observation orbit II, respectively.
represents Gaussian white noise with zero mean, with covariance given as
.
where the standard deviations are set to
for angle measurements and
for range measurements, accounting for factors such as sensor accuracy, environmental conditions, target characteristics, dynamic factors, systematic errors, and unmodeled spacecraft attitude errors.
First, Monte Carlo (MC) simulations were conducted to test the OD accuracy of the proposed method when using angle-with-range measurements.
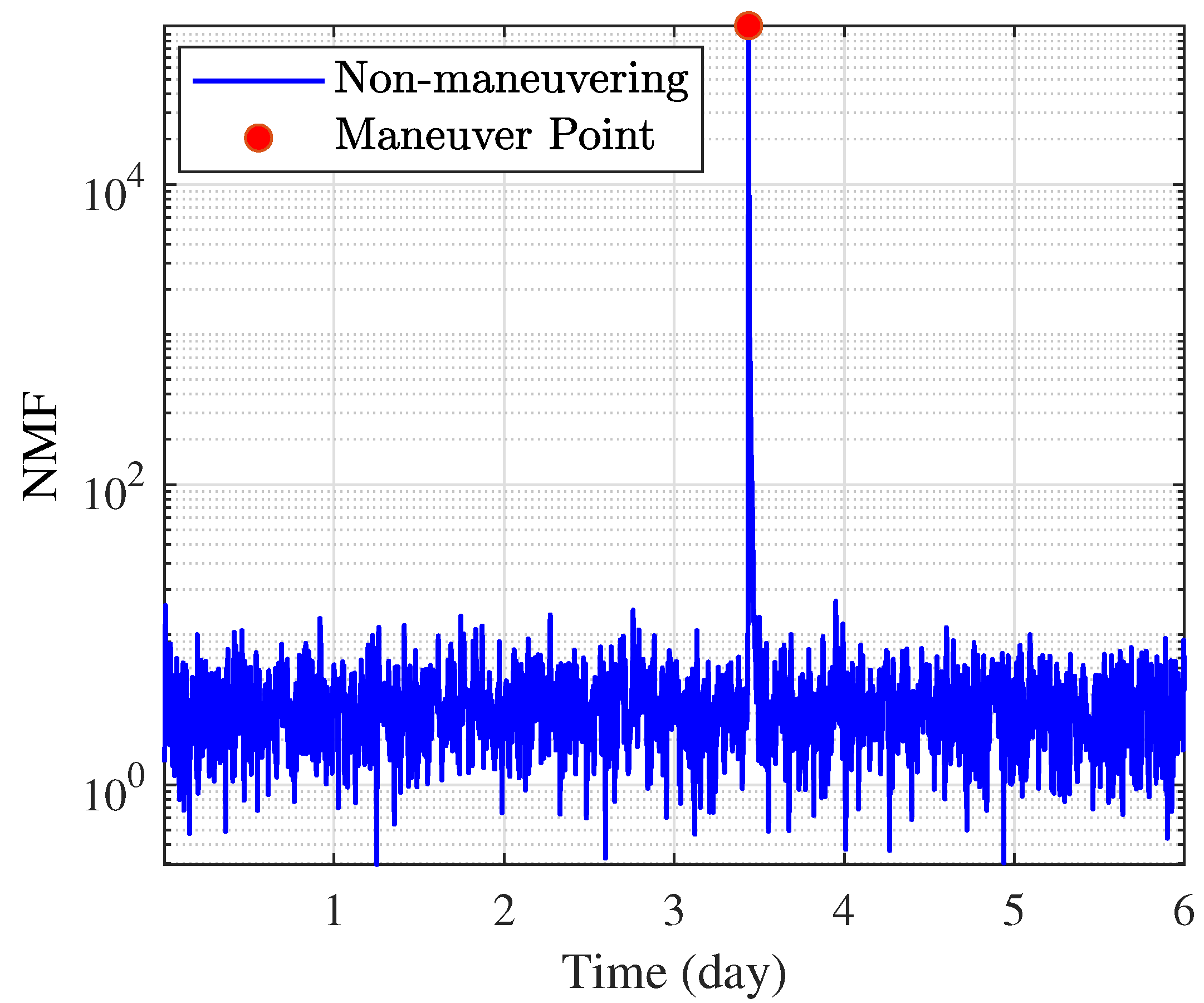
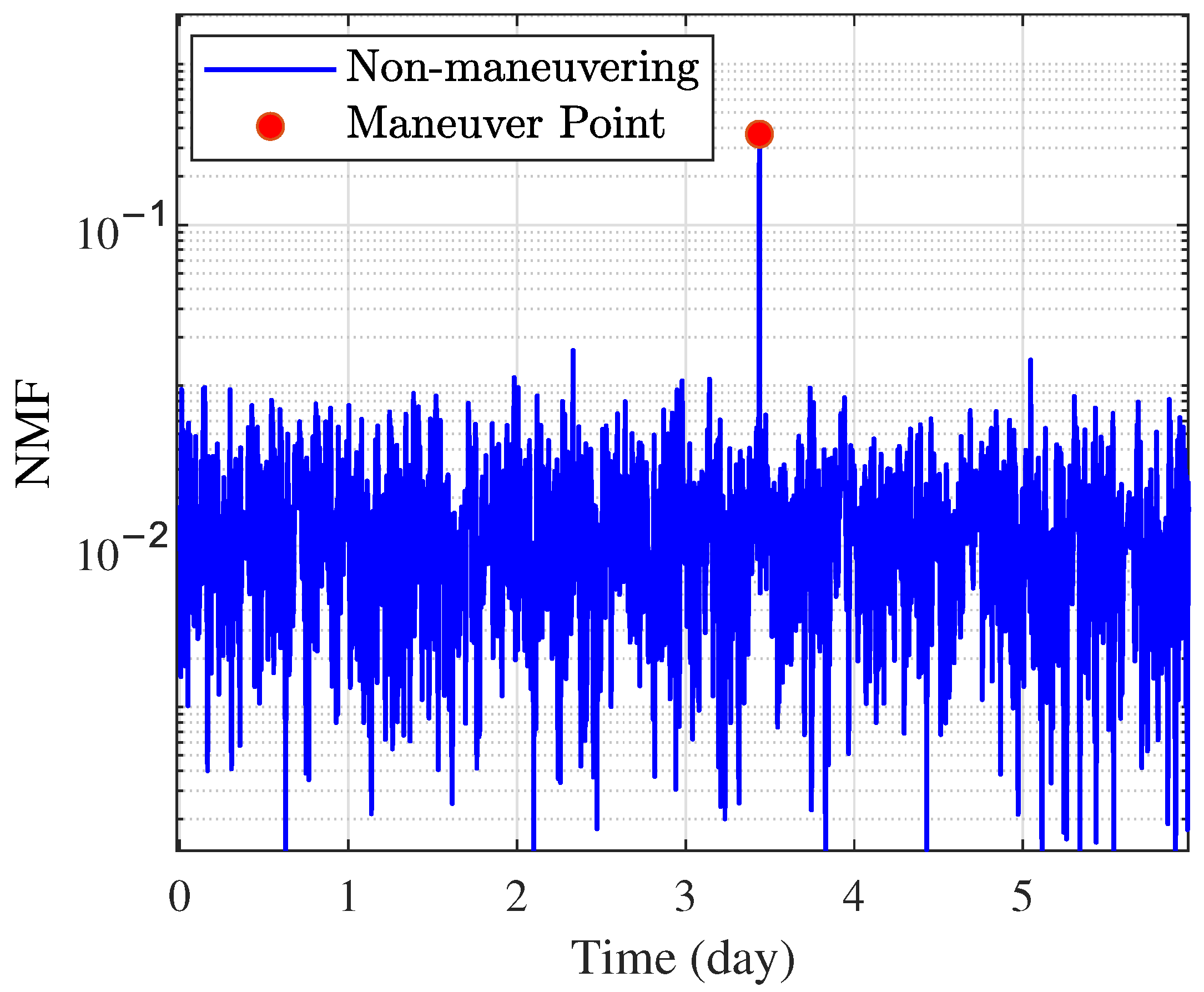
Figure 4 shows the 2-norm of the NMF from 300 MC simulations. It can be observed that when the target spacecraft was not maneuvering, the NMF remained below 20, while during a maneuver, the value exceeded 10,000. This demonstrates that the proposed NMF could serve as an indicator for determining whether the target spacecraft had maneuvered. After the maneuver, with compensation for the dynamics model through state noise, the NMF did not remain at a high level, but quickly returned to the same magnitude as before the maneuver, verifying the effectiveness of the proposed algorithm.
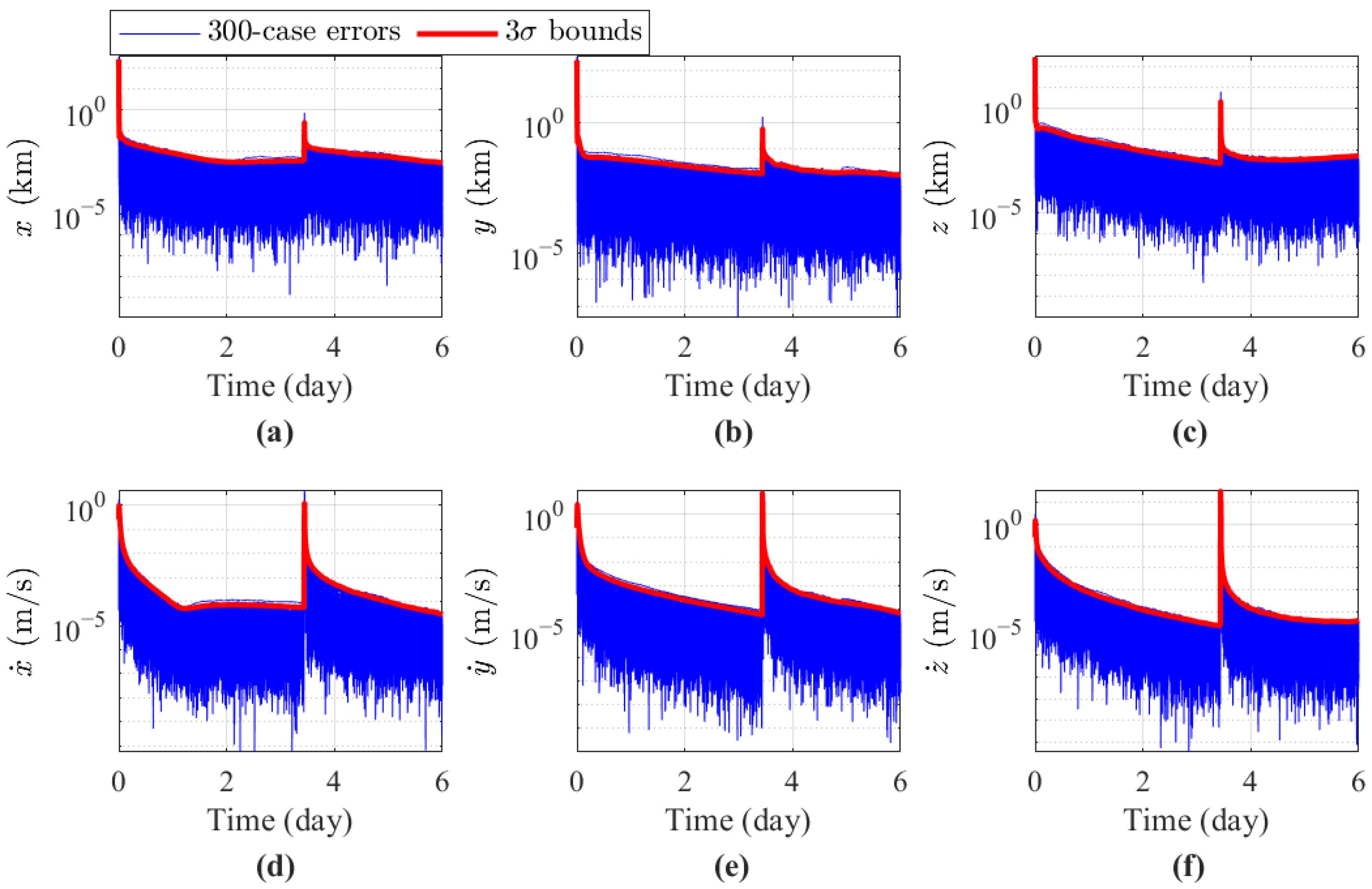
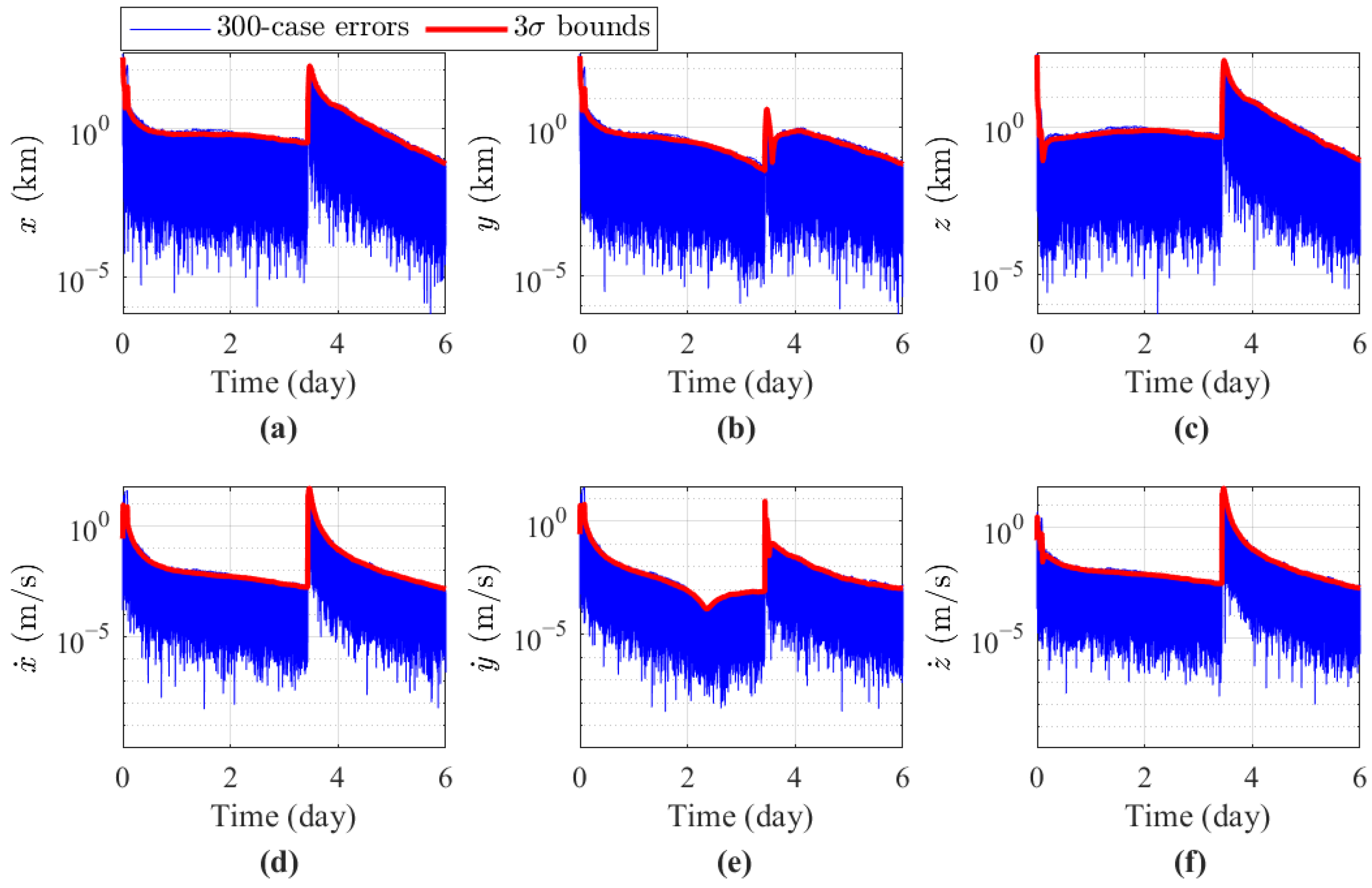
Figure 5 shows the estimation errors of the three-axis velocity and three-axis position for 300 MC simulations, with the red boundary indicating the
envelope of the estimation errors, and the blue lines representing the error for each OD run.
Then, the performance of the proposed algorithm was compared with that of three representative algorithms for maneuverable spacecraft: EKF, STF, and PAM. EKF is a widely used nonlinear filtering method that linearizes the system dynamics and measurement model. It exhibits a certain robustness and can handle disturbances to some extent. Next, STF, a Kalman filter-based algorithm, relies on the orthogonalization principle of residuals to estimate the state of maneuverable spacecraft. In this scenario, the forgetting factor was set to 0.95, and since there was no prior information on the maneuver magnitude and epoch, all selected coefficients were set to 1. Finally, the proposed algorithm was compared with PAM for OD of maneuverable spacecraft. PAM models the maneuvering portion of the spacecraft as an estimated state vector and uses polynomial fitting to handle unknown maneuvers. In this case, since the unknown maneuver was impulsive, the polynomial was set to 0th order, retaining only the constant term, and the initial maneuver magnitude was set to 0. By including EKF in the comparison, we aimed to provide insights into how traditional nonlinear filtering methods perform in the context of impulsive maneuvers and highlight the advantages of the proposed approach.
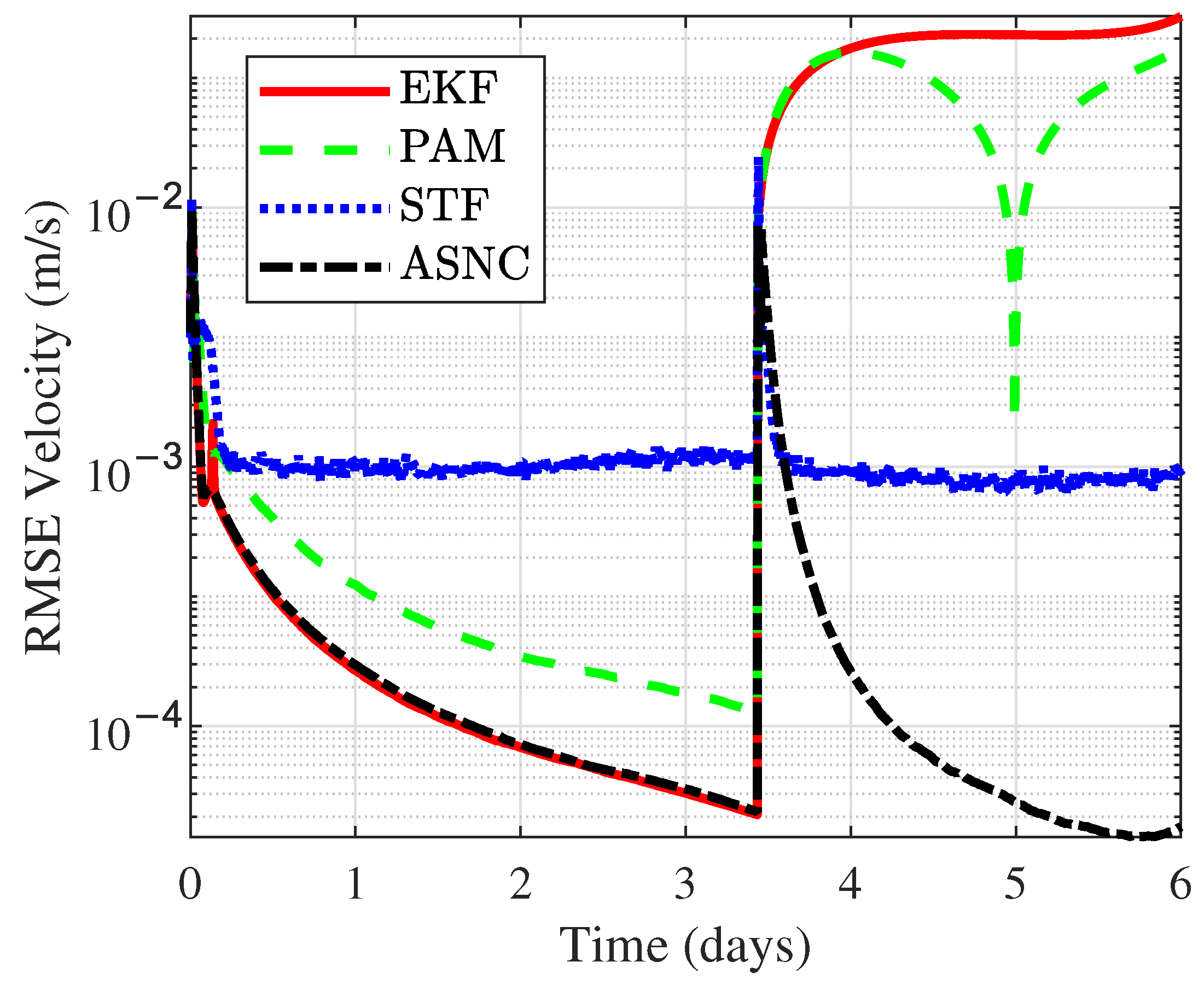
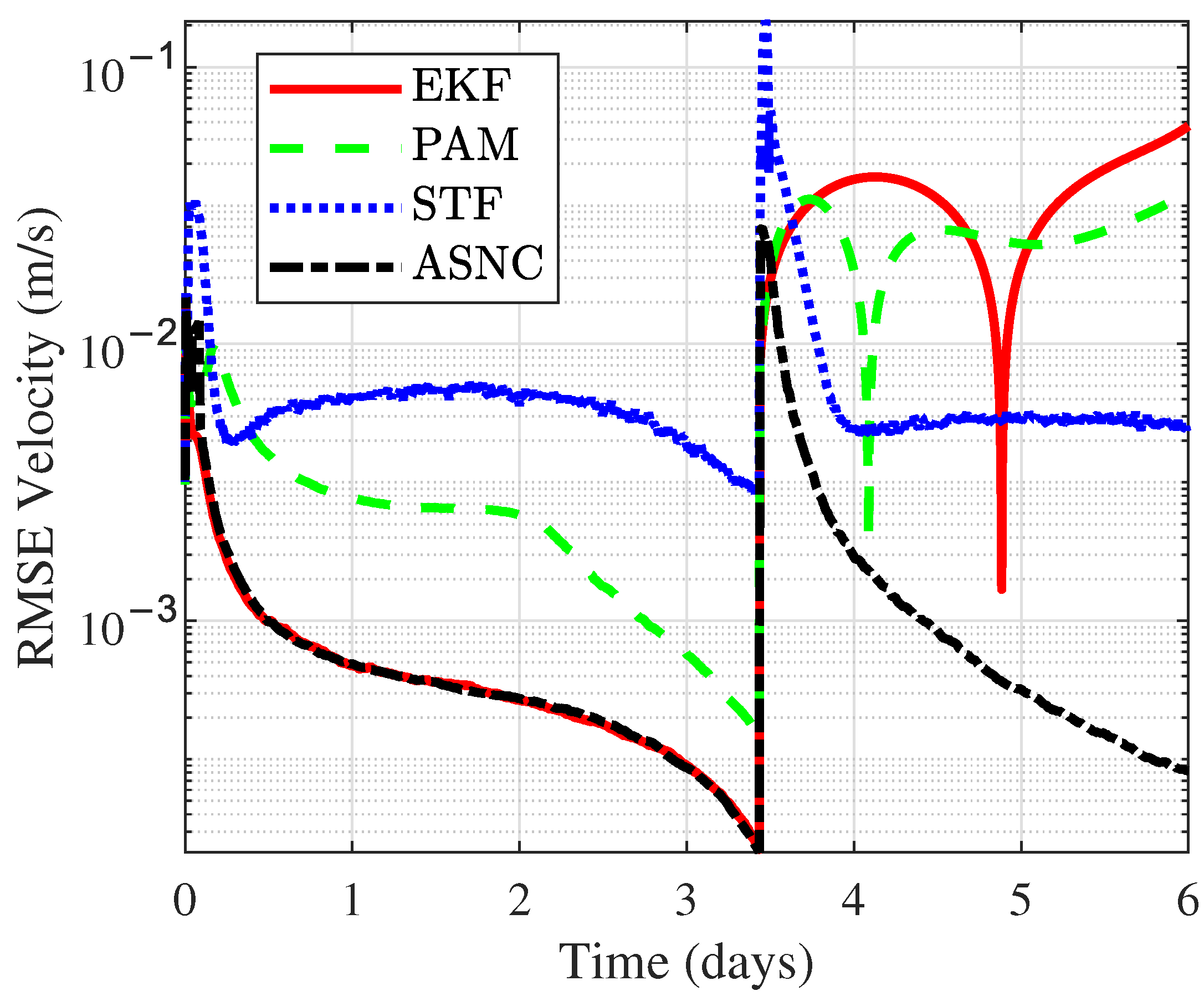
Figure 6 compares the Root Mean Square Error (RMSE) of velocity for the three methods over 300 Monte Carlo simulations, while
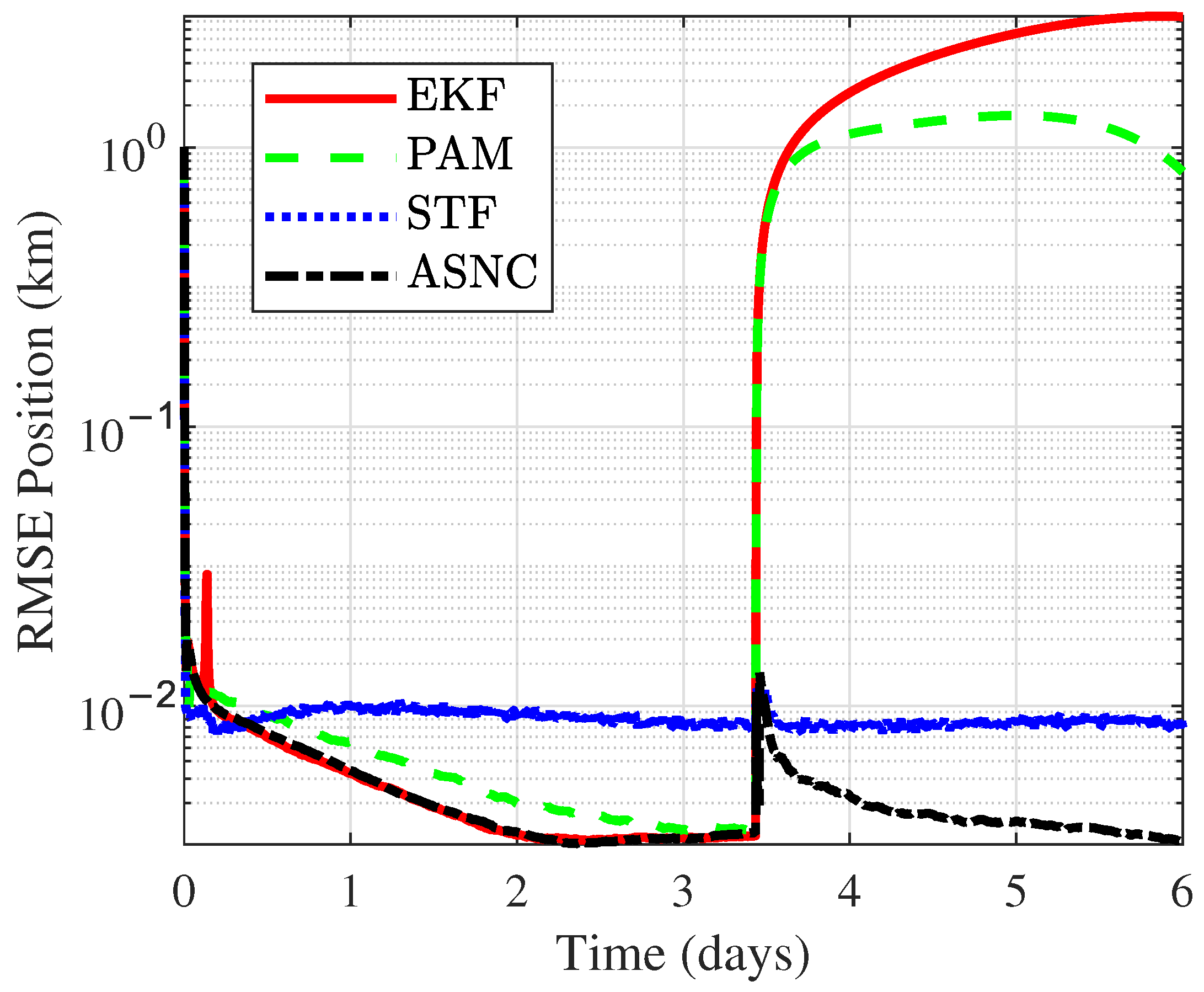
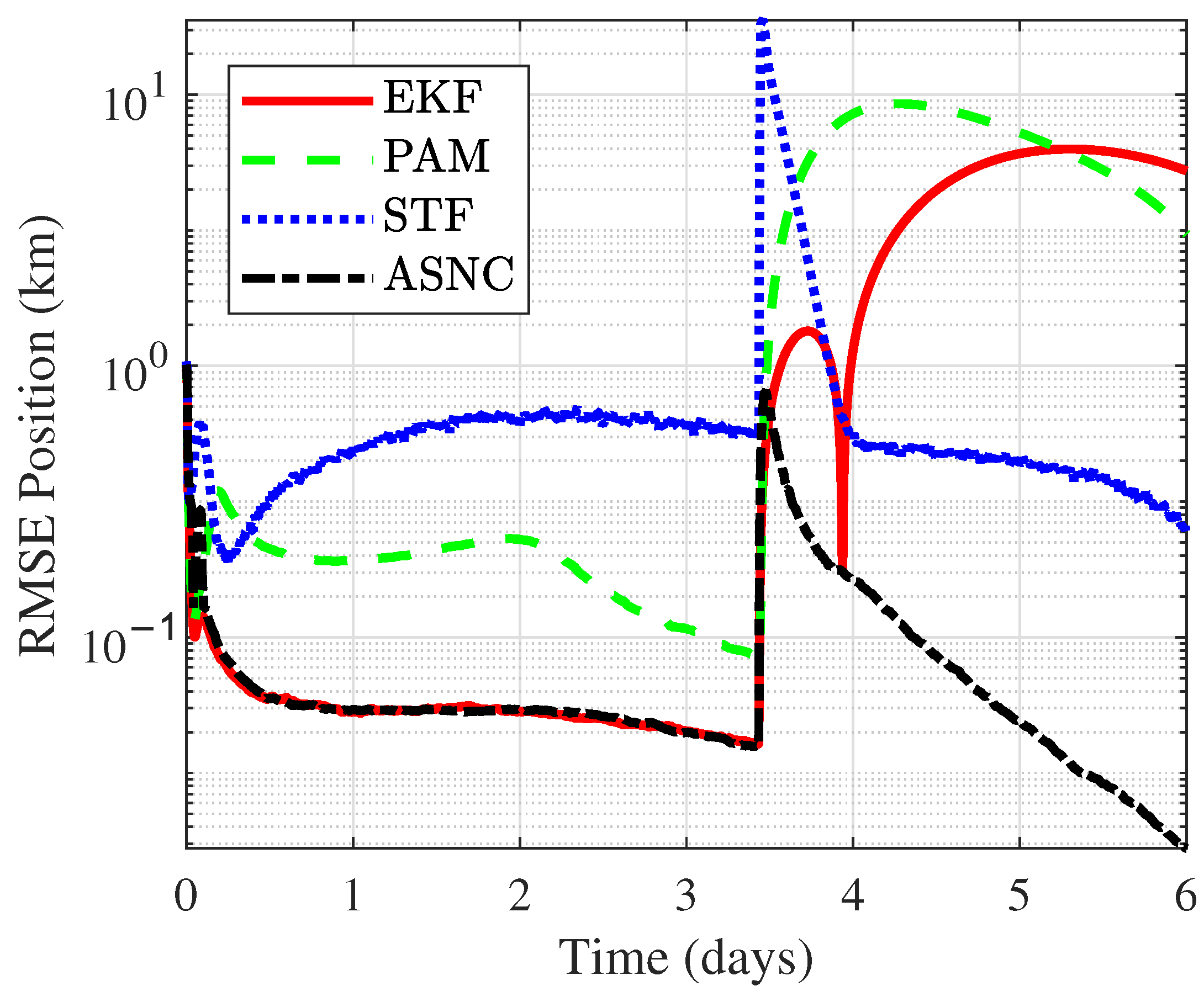
Figure 7 compares the RMSE of position.
Table 4 and
Table 5 provide detailed numerical comparisons of the RMSE for position and velocity, respectively, under angle-with-range measurements. When no maneuver occurred, the ASNC algorithm achieved the smallest OD error, with velocity RMSE on the order of
and position RMSE on the order of
. The PAM algorithm showed the second-best accuracy, with its velocity and position RMSE about one order of magnitude higher than ASNC, while the STF algorithm yielded the largest position and velocity errors. This was due to STF’s lack of prior information on the maneuver, making it difficult to configure the filter for more precise OD. The ASNC algorithm used the NMF to detect spacecraft maneuvers in real time, ensuring that the state noise was set to zero when no maneuver occurred, thus maintaining maximum accuracy, without filter divergence. When a maneuver occurred, PAM diverged quickly, leading to significant estimation errors, as it struggled to approximate the state transitions caused by spacecraft impulsive maneuvers using polynomial fitting. Meanwhile, the proposed ASNC algorithm outperformed STF in maneuver scenarios by utilizing Position State Noise Estimation via Match and Velocity State Noise Estimation via Inverse Mapping, ensuring the filter obtained the optimal state noise covariance matrix for high-precision OD during maneuvers.
Figure 6 compares the Root Mean Square Error (RMSE) of velocity for the four methods over 300 Monte Carlo simulations, while
Figure 7 compares the RMSE of position.
Table 4 and
Table 5 provide detailed numerical comparisons of the RMSE for position and velocity, respectively, under angle-with-range measurements. When no maneuver occurred, both the ASNC algorithm and the EKF achieved the smallest OD error, with the velocity RMSE on the order of
and the position RMSE on the order of
. The PAM algorithm showed the second-best accuracy, with its velocity RMSE about one order of magnitude higher than ASNC and its position RMSE approximately twice that of ASNC. In contrast, the STF algorithm yielded the largest position and velocity errors. This was due to STF’s lack of prior information on the maneuver, making it difficult to configure the filter for more precise OD. The ASNC algorithm used the NMF to detect spacecraft maneuvers in real time, ensuring that the state noise was set to zero when no maneuver occurred, thus maintaining the maximum accuracy, without filter divergence. When a maneuver occurred, both PAM and EKF diverged quickly, leading to significant estimation errors. PAM struggled to approximate the state transitions caused by impulsive maneuvers using polynomial fitting, while EKF exhibited limited robustness in handling impulsive maneuvers. In contrast, the proposed ASNC algorithm outperformed STF in maneuver scenarios by utilizing Position State Noise Estimation via Match and Velocity State Noise Estimation via Inverse Mapping, ensuring the filter obtained the optimal state noise covariance matrix for high-precision OD during maneuvers.
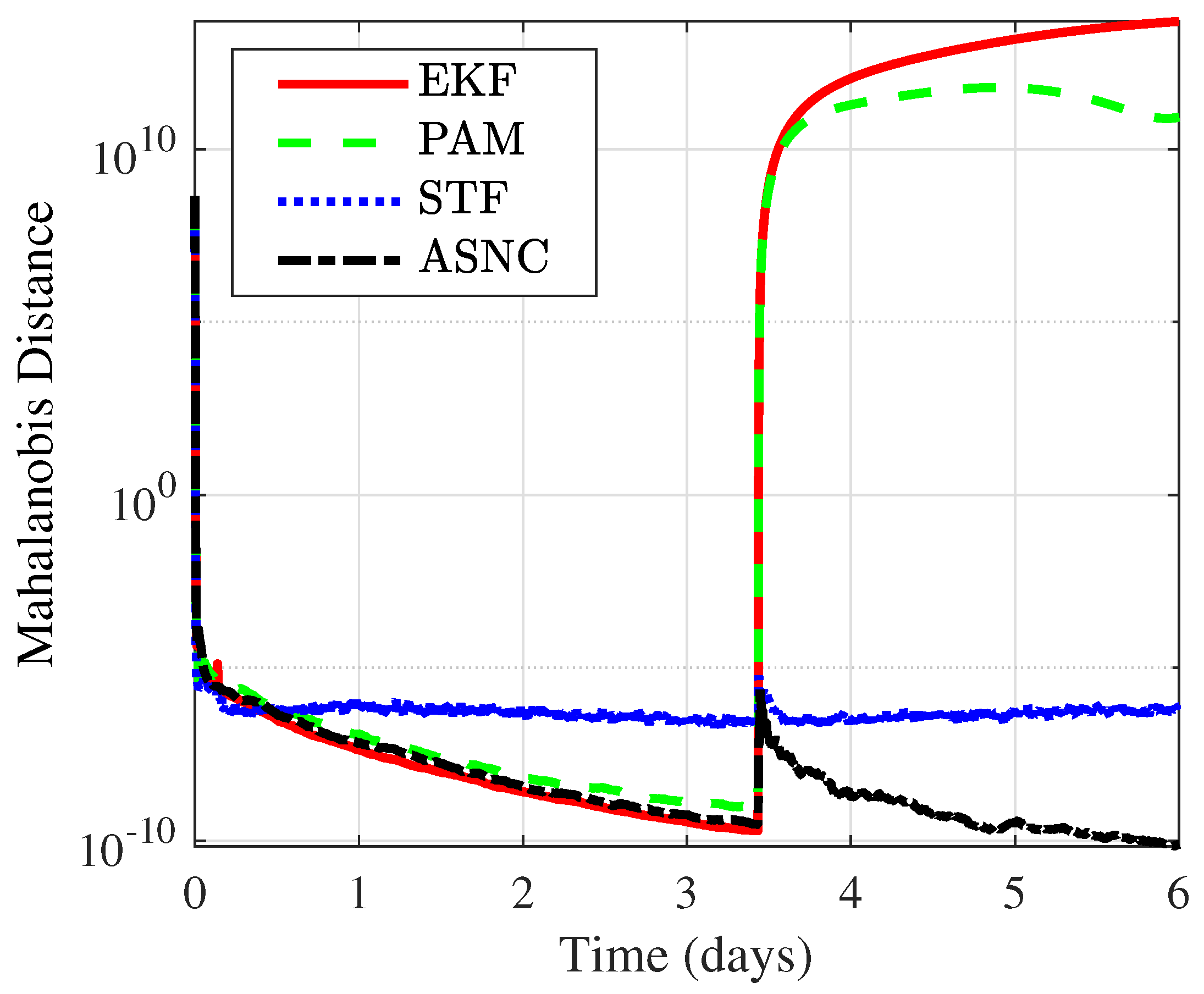
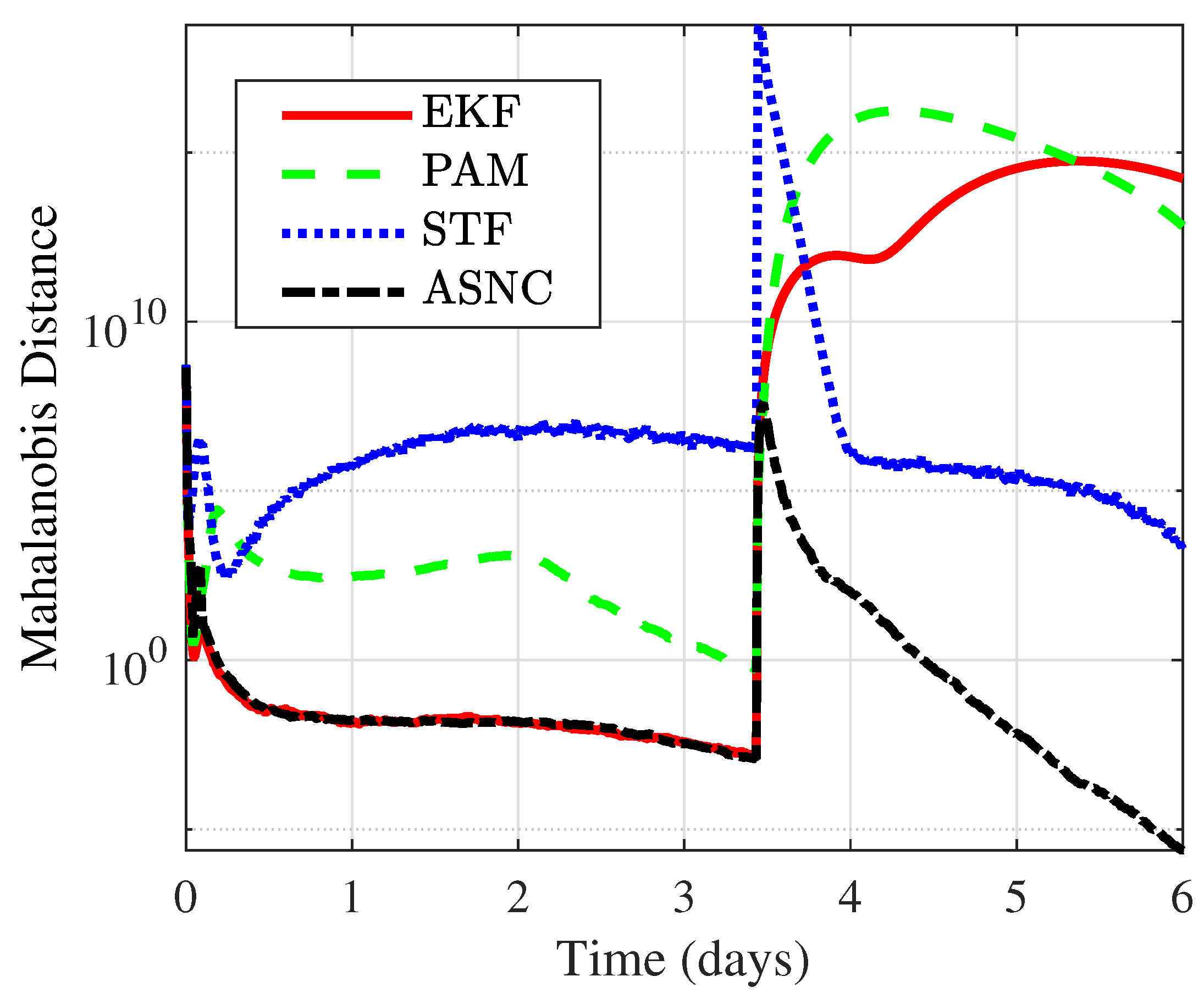
Next, the uncertainty of OD was measured using the Mahalanobis distance (MD), which is an important quantitative metric for evaluating algorithm uncertainty [
18]. The Mahalanobis distance not only reflects the difference between estimated and actual positions but also takes into account the covariance in different directions, providing a more comprehensive assessment of estimation uncertainty. Unlike Euclidean distance (ED), MD eliminates the influence of different scales among variables, allowing errors in different measurement dimensions to be evaluated using the same standard. Therefore, using MD provided a more accurate evaluation of the uncertainty of the OD algorithm. The calculation formula for MD is shown in Equation (
43)
where
is the estimated state vector,
is the true state vector, and
is the covariance matrix of the estimated state vector. In this example,
was replaced by the mean value from 300 MC simulations.
Figure 8 compares the MD of the four methods over 300 MC simulations, and
Table 6 provides a detailed numerical comparison of MD under angle-with-range measurements. Similarly to for the RMSE comparison, the ASNC algorithm outperformed the other algorithms in terms of MD, both in non-maneuvering and maneuvering scenarios.
Finally,
Table 7 compares the average single run time and total time consumption for 300 MC simulations across the three algorithms (EKF is excluded from the comparison). PAM exhibited the longest computation time, followed by STF, while the proposed algorithm demonstrated the smallest time consumption. This efficiency was achieved because the proposed algorithm modeled the state noise as a piecewise function based on the NMF, effectively handling both maneuvering and non-maneuvering phases of the impulsive maneuver spacecraft. The computationally intensive processes of Position State Noise Estimation via Match and Velocity State Noise Estimation via Inverse Mapping were only activated during maneuvers. As a result, the proposed algorithm achieved the shortest computation time, reducing the time consumption by 11.00% compared to STF and by 94.50% compared to PAM.
4.3. Angle-Only Observation
In this section, angle-only measurements from a single observation satellite (Observation Orbit I) were used. Compared to angle-with-range observation, angle-only observation has fewer observation dimensions, resulting in sparser observational data. This type of measurement provided more limited spatial positioning information, which imposed higher demands on the OD algorithm. Additionally, validating the proposed algorithm under single-satellite observation conditions helped extend its applicability to near-Earth rendezvous and proximity operations, particularly for uncooperative target spacecraft. The angle measurements of the target spacecraft are given as
where
represents the distance between the target spacecraft and the observation spacecraft on Observation Orbit I.
represents Gaussian white noise with zero mean, with covariance given as
where the standard deviation was set to
for angle measurements, accounting for factors such as sensor accuracy, environmental conditions, target characteristics, dynamic factors, systematic errors, and unmodeled spacecraft attitude errors.
Similarly to the analysis process for angle-with-range observations, MC simulations were first conducted to test the OD accuracy of the proposed method when using angle-only measurements.
Figure 9 shows the 2-norm of the NMF from 300 MC simulations. It can be observed that when the target spacecraft was not maneuvering, the NMF remained below 50, while during a maneuver, its value exceeded 100. This demonstrates that the proposed NMF could also be used to determine whether the target spacecraft had maneuvered under angle-only observations. After the maneuver, the NMF quickly returned to the same magnitude as before the maneuver, verifying the effectiveness of the proposed algorithm for angle-only measurements.
Figure 10 shows the estimation errors of the three-axis velocity and three-axis position for 300 MC simulations, with the red line indicating the
bound of the estimation errors, and the blue lines representing the error for each OD run.
As in the case of the angle-with-range observations, the proposed algorithm was compared with EKF, STF, and PAM: The forgetting factor for STF was set to 0.95, and all selected coefficients were set to 1. In PAM, because the unknown maneuver was impulsive, the polynomial was set to 0th order, retaining only the constant term, and the initial maneuver magnitude was set to 0.
Figure 11 compares the RMSE velocity of the four methods over 300 MC simulations, and
Figure 12 compares the RMSE position.
Table 8 and
Table 9 provide detailed numerical comparisons of the RMSE for position and velocity, respectively, under angle-only measurements. In the absence of maneuvers, the proposed ASNC algorithm and the EKF achieved the highest OD accuracy, with RMSE velocity on the order of
and RMSE position on the order of
. PAM achieved a better position and velocity accuracy than STF, but both were at least one order of magnitude lower in accuracy compared to ASNC and EKF. When a maneuver occurred, the proposed ASNC algorithm achieved an RMSE position of 22.0366 km and an RMSE velocity of 6.40077 m/s, and then quickly converged to the same accuracy as before the maneuver, with RMSE velocity on the order of
and RMSE position on the order of
. During the maneuver, both PAM and EKF diverged rapidly, leading to significant estimation errors, while STF converged slowly to an accuracy comparable to that before the maneuver. Under under-determined conditions, ASNC maximized the processing of the state noise covariance matrix, ensuring convergence, while achieving high OD accuracy.
Figure 13 compares the MD of the four methods over 300 MC simulations under angle-only measurements, and
Table 10 provides a detailed numerical comparison of MD. Unlike the angle-with-range measurements, the OD performance of all four methods declined. Before the maneuver, ASNC and EKF achieved the highest OD accuracy, with an MD on the order of
. After the maneuver, the MDs of EKF, STF, and PAM reached the orders of
,
, and
, respectively, while ASNC maintained the lowest MD, on the order of
. Therefore, even under angle-only measurements, ASNC still demonstrated the best OD performance.
Table 11 provides a comparison of the single run and total time consumption for 300 MC simulations using the three different algorithms (EKF is excluded from the comparison). PAM had the longest time consumption, while the STF and the ASNC algorithm had a similar time consumption, with the proposed algorithm consuming slightly less. The ASNC algorithm still achieved the highest computational efficiency when using angle-only information as the measurement, performing on par with STF (12.97% more efficient) and significantly outperforming PAM (428.82% improvement).
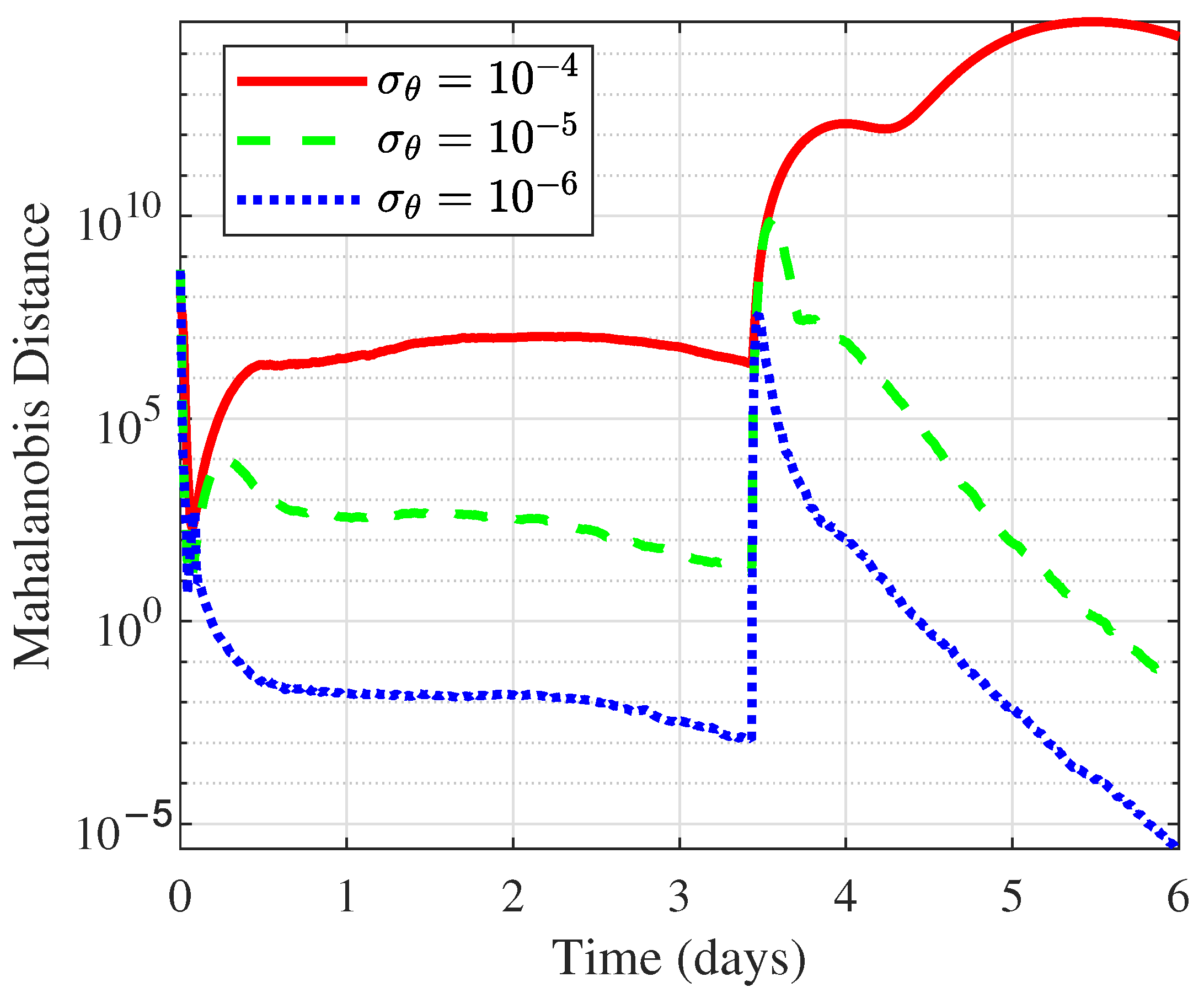
Figure 14 compares the MD of the different measurement noise levels in 300 MC simulations under angle-only measurements. As can be seen from the figure, in the absence of maneuvers, the OD accuracy decreased as the measurement noise increased. When a maneuver occurred, the OD results diverged if the noise exceeded a certain threshold (
). Therefore, lower measurement noise led to stronger robustness and higher accuracy, and the proposed algorithm was relatively sensitive to noise.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}