
Bluff Body Size Parameters and Vortex Flowmeter Performance: A Big Data-Based Modeling and Machine Learning Methodology
Abstract
1. Introduction
2. Materials and Methods
2.1. Fluid Mechanics Theories
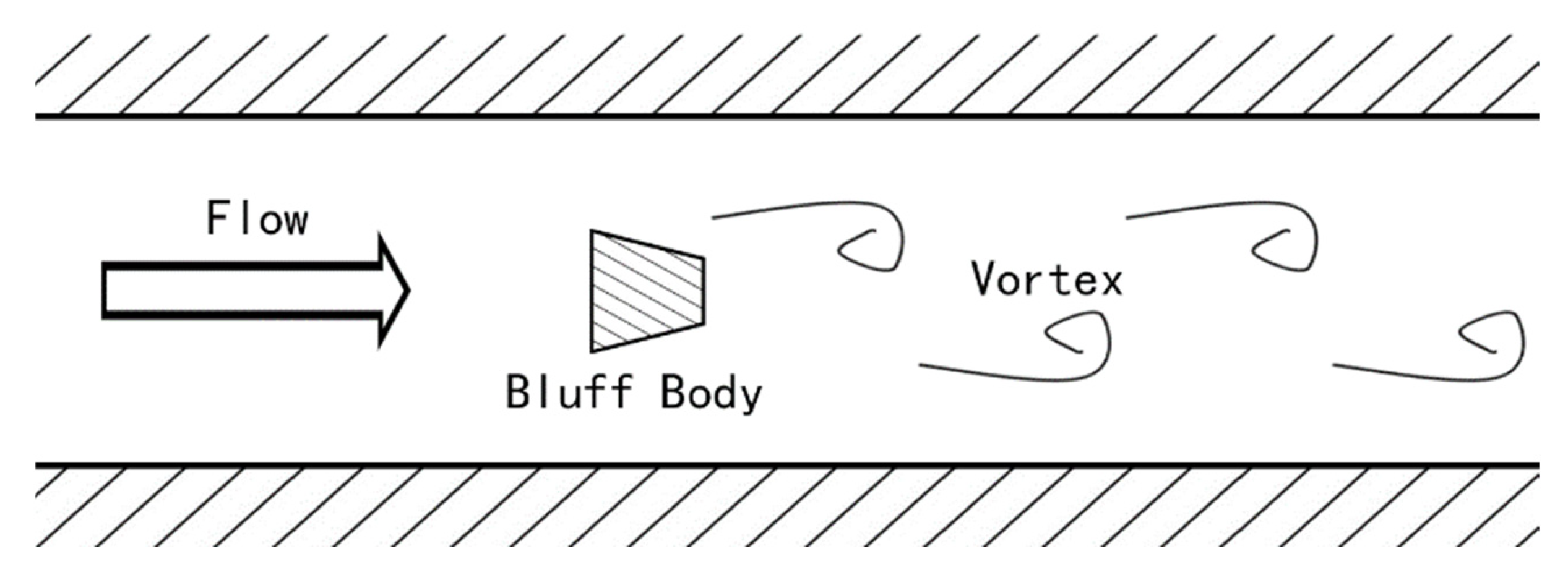
2.1.1. Principle of Karman Vortex
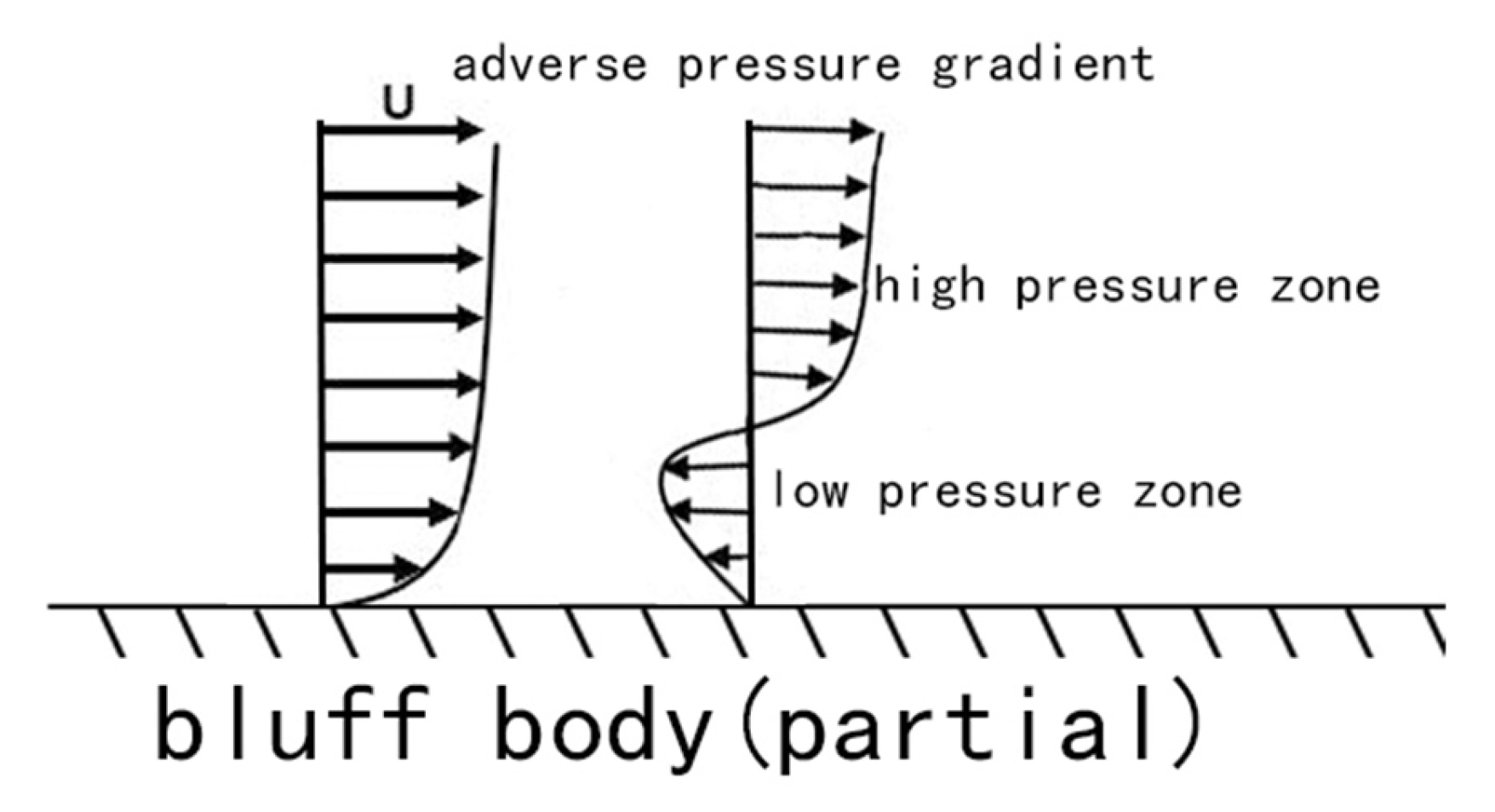
2.1.2. Boundary Layer Theory
2.1.3. Navier–Stokes Equations
2.1.4. Reynolds-Averaged Navier–Stokes (RANS) Equations
2.1.5. RNG k-ε Model
2.1.6. Lift Coefficient and Drag Coefficient
2.2. Geometric Modeling and Meshing
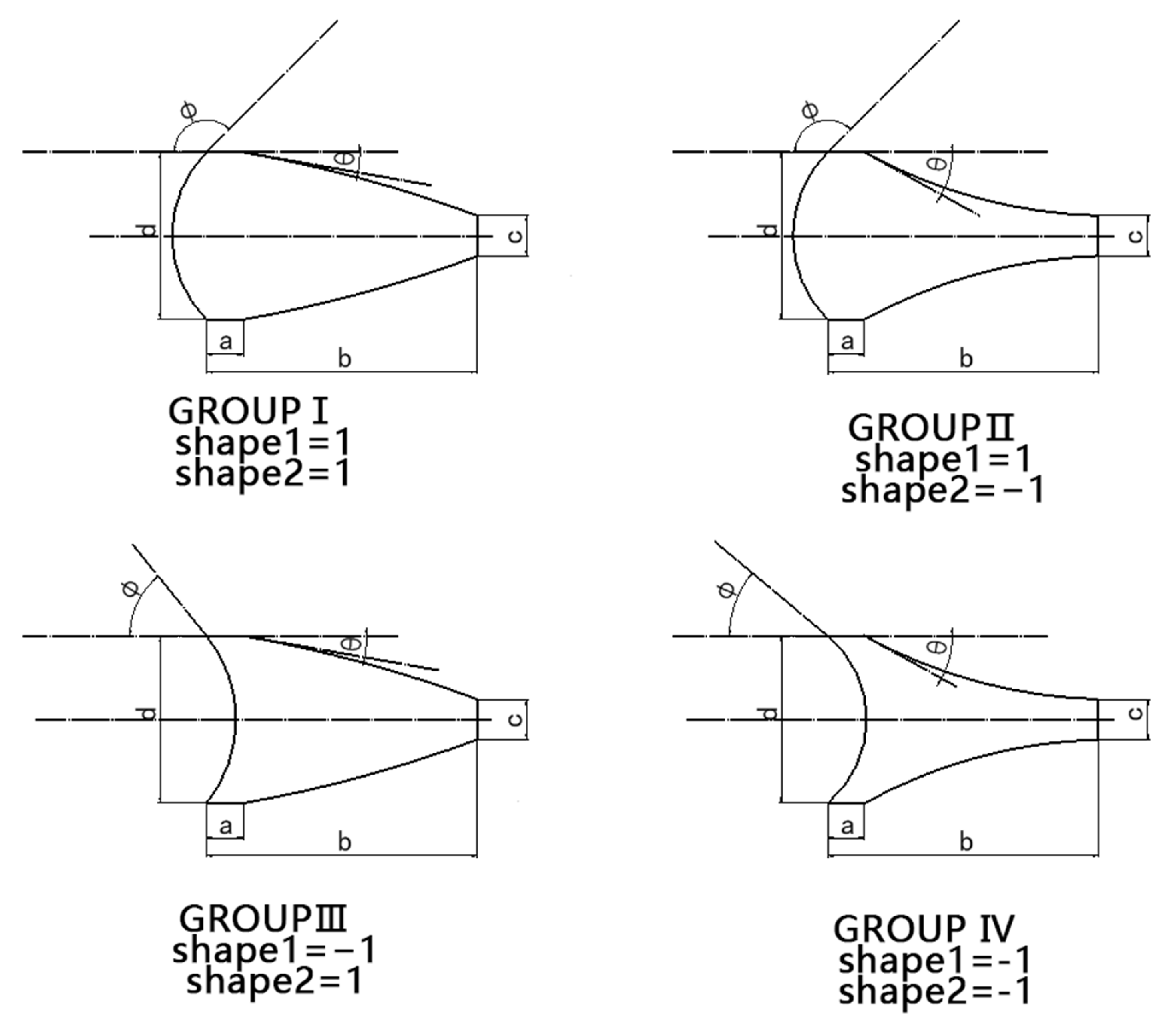
2.2.1. Definition of Dimension Parameters
| a | transition edge, parallel to the direction of flow velocity, located between the forward arc and backward arc. Structural parameter |
| b | bluff body length, parallel to the direction of flow velocity, equals the length of a bluff body projected parrel to the direction of flow velocity. Structural parameter |
| c | downstream width, vertical to the direction of flow velocity, equals the minimum distance between two backward arcs. Structural parameter |
| d | upstream width, vertical to the direction of flow velocity, equals the width of a bluff body projected perpendicular to the direction of flow velocity. It determines the blockage ratio of a bluff body. It is also the characteristic length. Structural parameter |
| ϕ | the angle between the horizontal direction and the tangent at the intersection point of the forward arc with a (transition edge). Structural parameter |
| θ | the angle between the horizontal direction and the tangent at the intersection point of the backward arc with a (transition edge). Structural parameter |
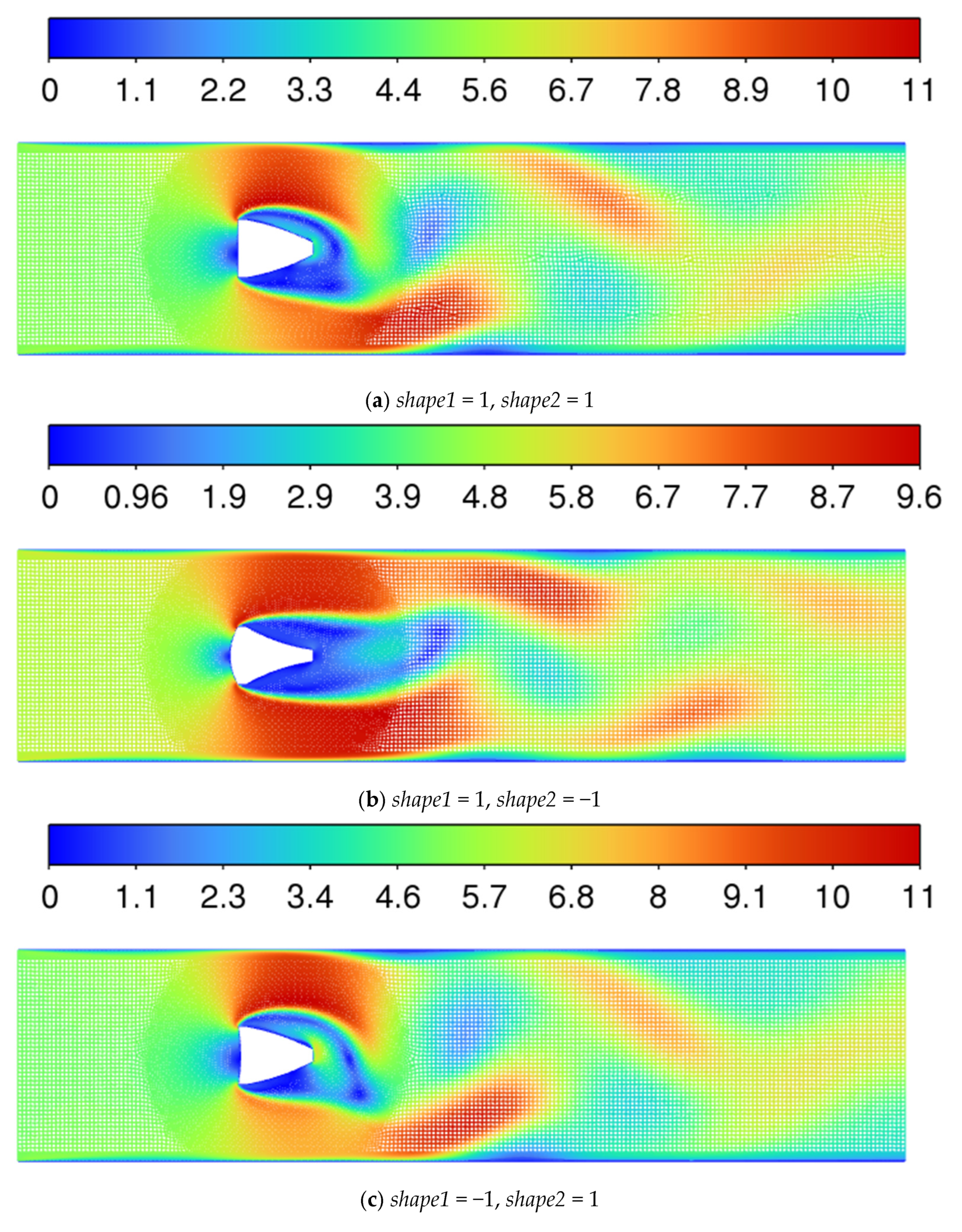
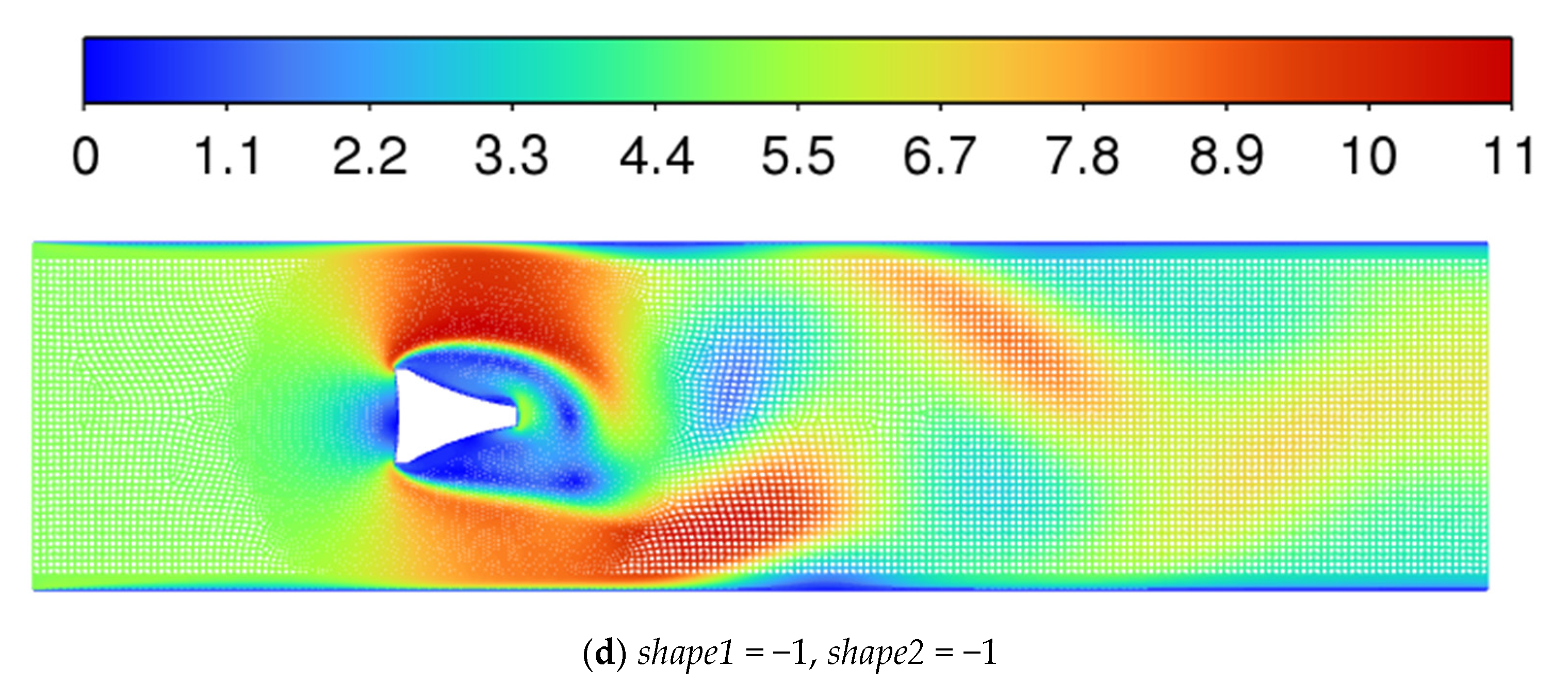
| Shape1 | defined by the shape of the forward arc. When the arc is convex (positive), the value is 1; when the arc is concave (negative), the value is −1. Shape parameter |
| Shape2 | defined by the shape of the backward arc. When the arc is convex (positive), the value is 1; when the arc is concave (negative), the value is −1. Shape parameter |
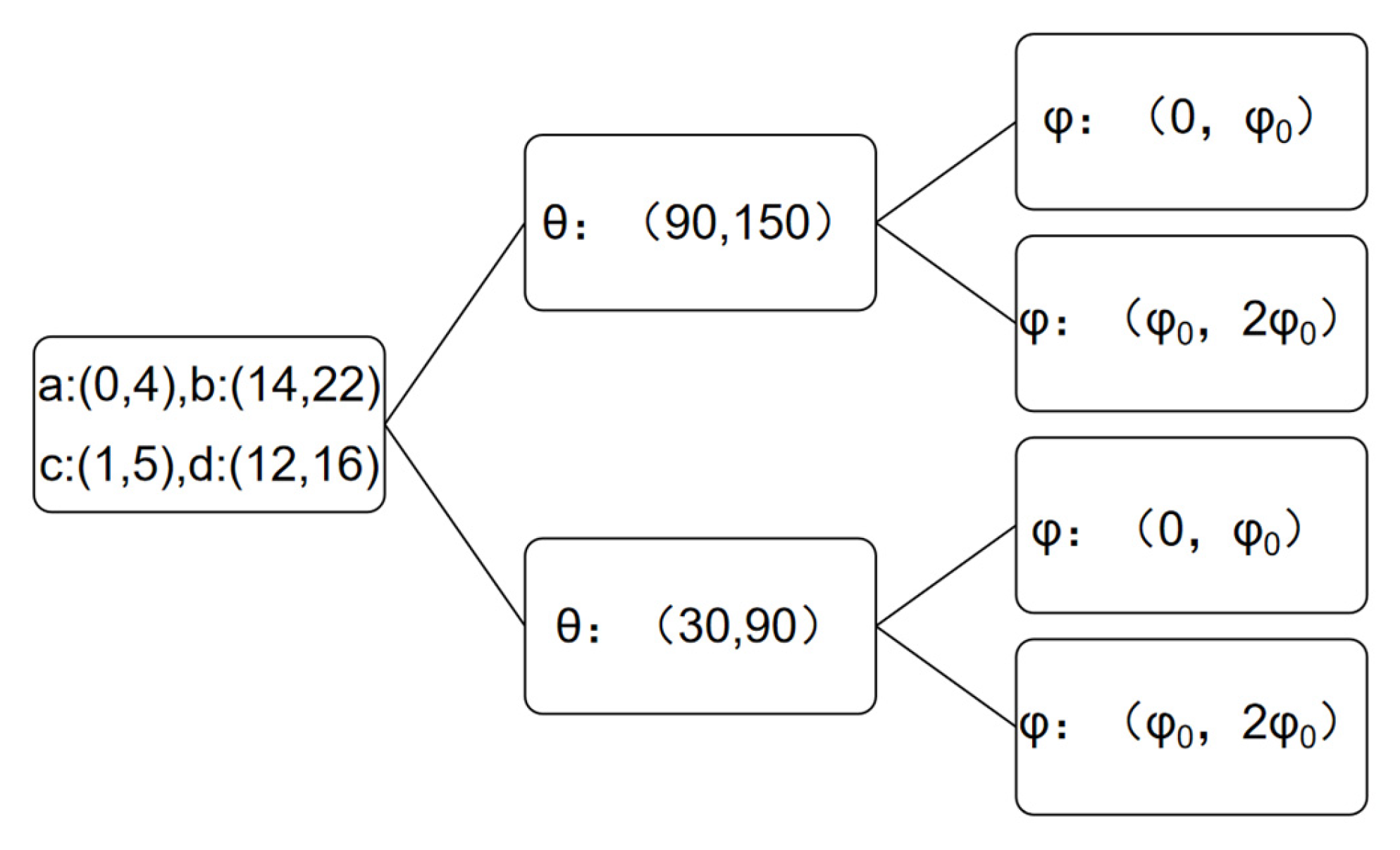
2.2.2. Latin Hypercube Sampling Method
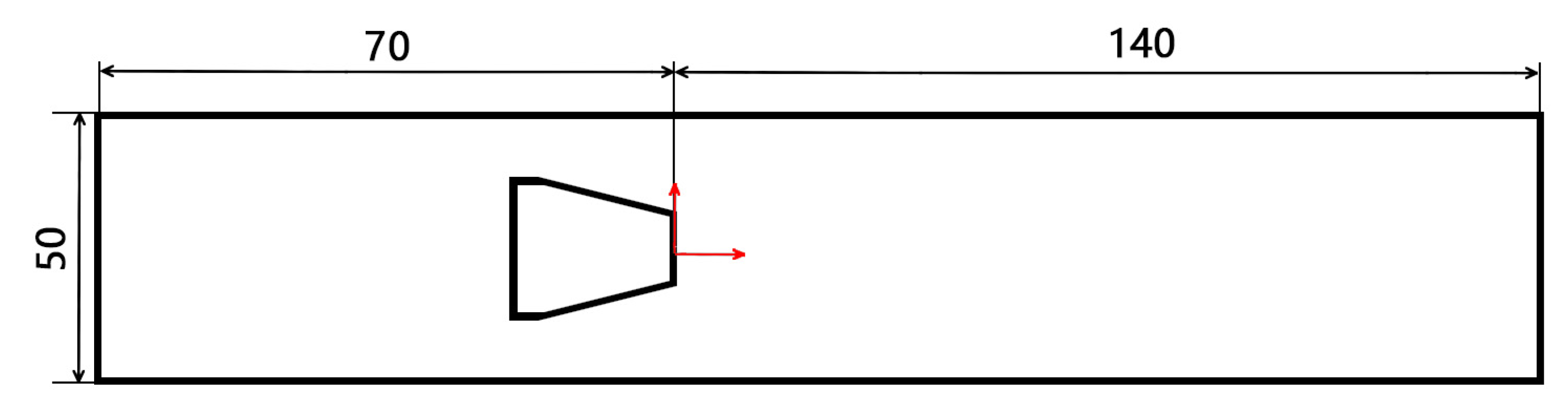
2.2.3. Flow Field Modeling
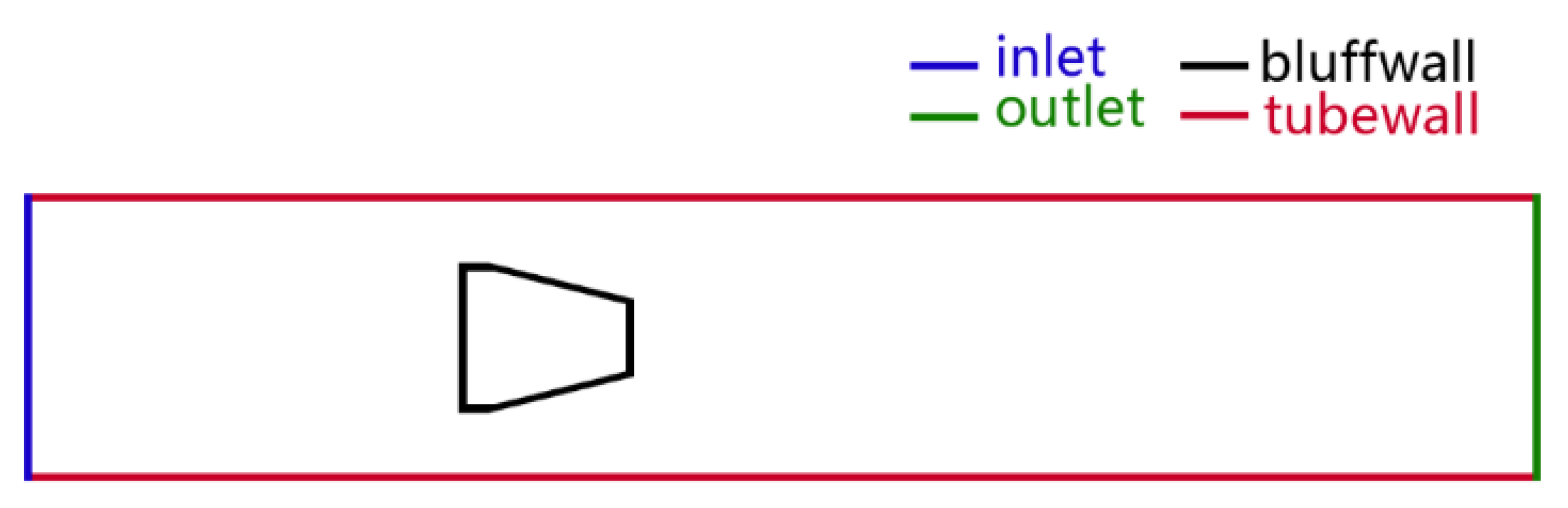
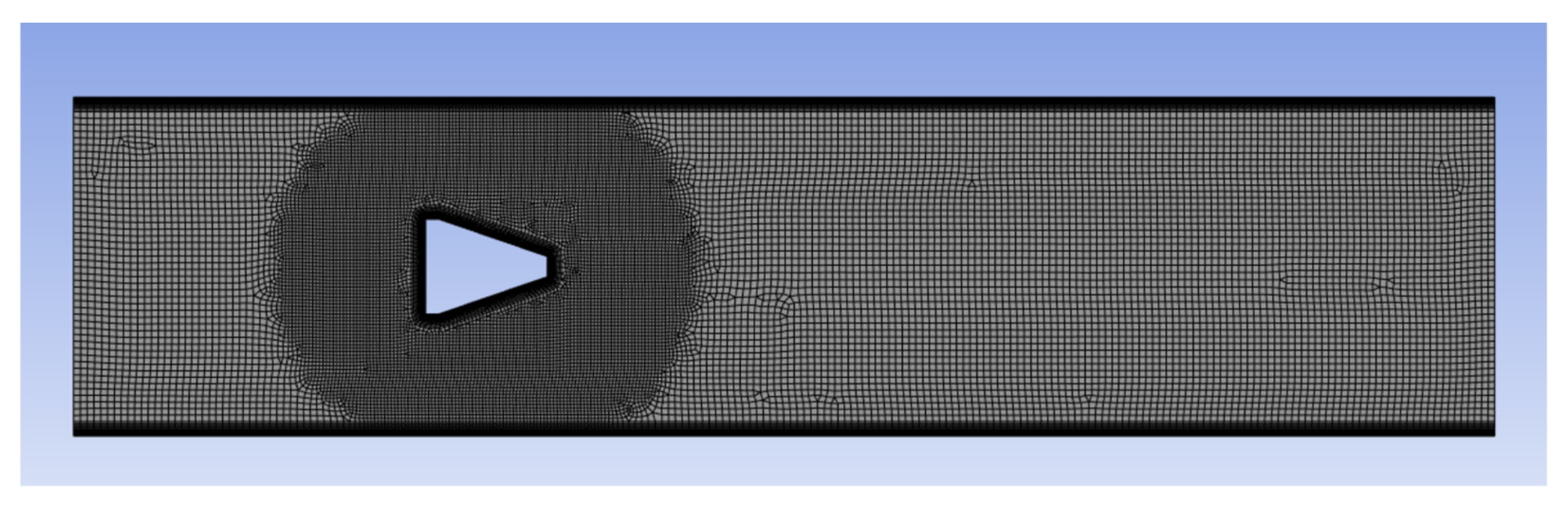
2.2.4. Mesh Division and Naming Selection
| Mesh type | Quad/Tri |
| Global mesh | 1 mm |
| Refined mesh | 0.5 mm, Circle, the radius of the refined area is 30 mm, and its center coordinate is (−9, 0, 0). |
| Expansion | On bluffwall and tubewall, the thickness of the first layer is 0.1 mm, the number of layers was 12, and the growth rate was 1.1. |
2.3. Build the Simulation Model
2.3.1. Serial Simulation Technology
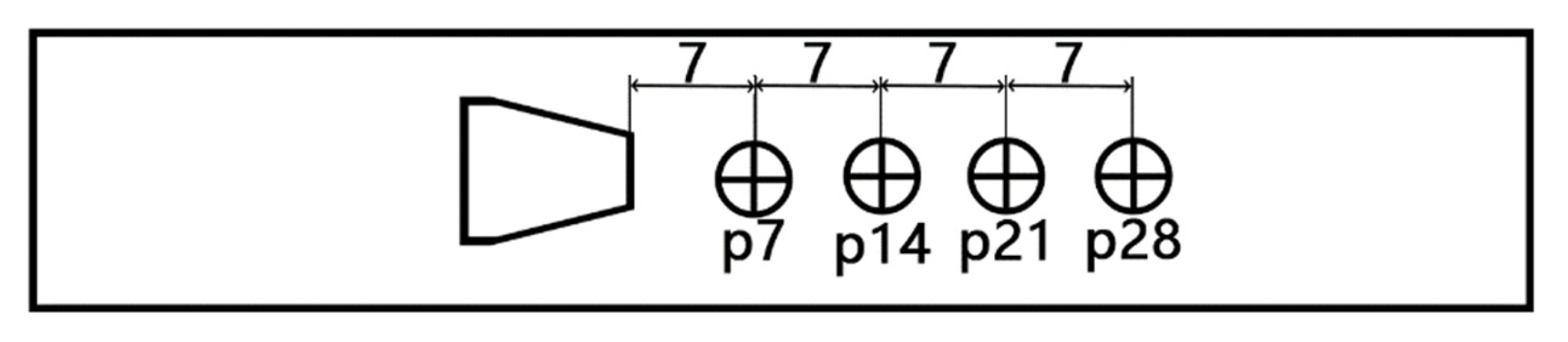
2.3.2. Monitored Parameters Setting
| p7 | The velocity in the y-direction of p7 |
| p14 | The velocity in the y-direction of p14. In industrial production, the probe is often located at here |
| p21 | The velocity in the y-direction of p21 |
| p28 | The velocity in the y-direction of p28 |
| Pin | The average pressure of fluid inlet |
| Pout | The average pressure of fluid outlet |
| CL | bluff body wall (bluffwall) lift coefficient |
| CD | bluff body wall (bluffwall)drag coefficient |
2.3.3. CFD Parameter Setting
| Fluid type | air |
| Design points | 2500 in total |
| Shapes | 4 shapes per design point |
| Model | RNG k-ε |
| Time step | 0.0005 s, 500 steps(per design point) |
| Iteration number | 20 times/step |
| Inlet | 5 m/s |
| Bluffwall and Tubewall | no-slip boundary conditions |
| Outlet | gauge pressure 0 Pa |
2.3.4. Mesh Simulation Verification
2.4. Mathematics Method
2.4.1. Fast Fourier Transform
2.4.2. Grey Relation Analysis
2.4.3. Kernel Ridge Regression
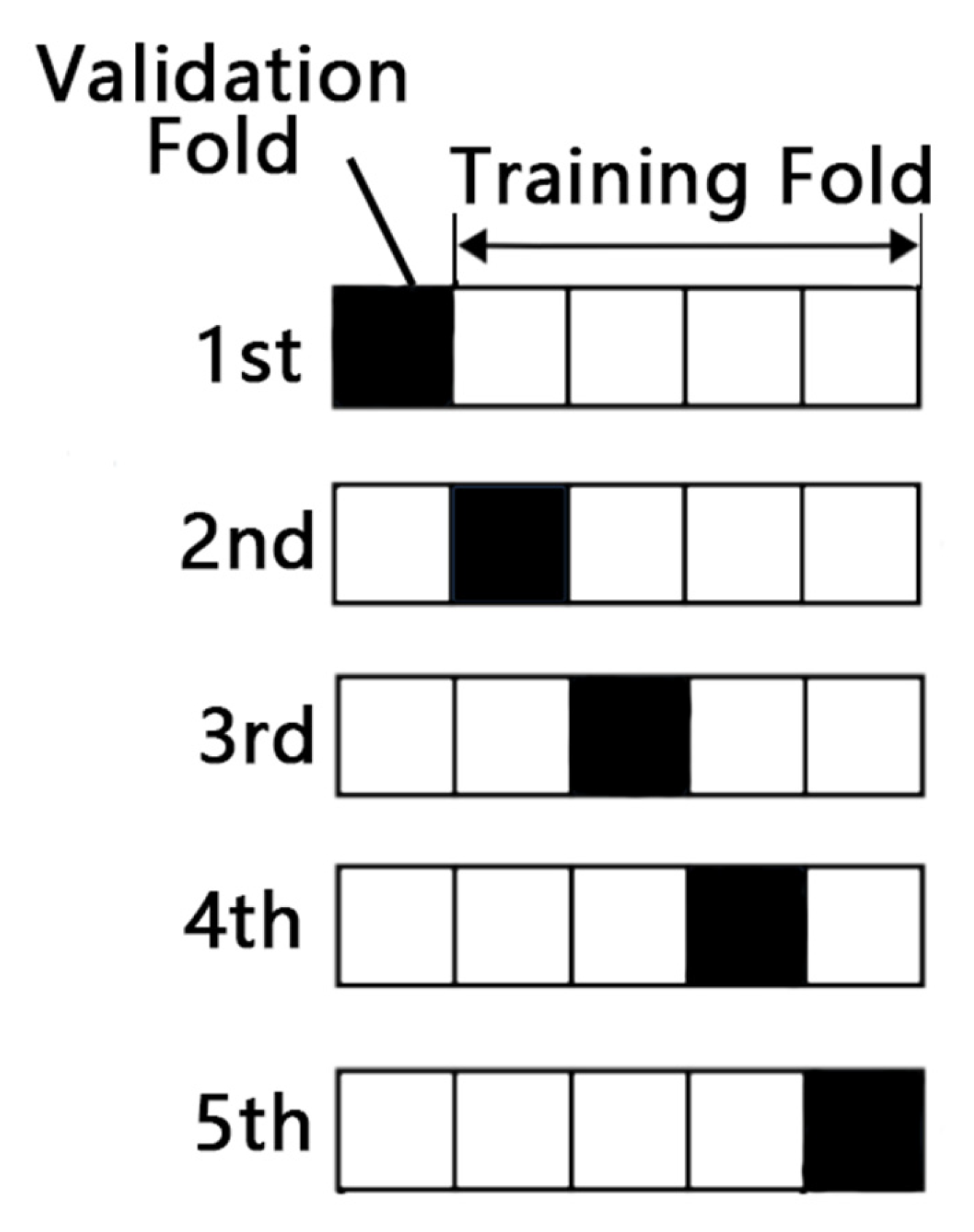
2.4.4. K-Fold Cross-Validation
2.5. Evaluation Criteria
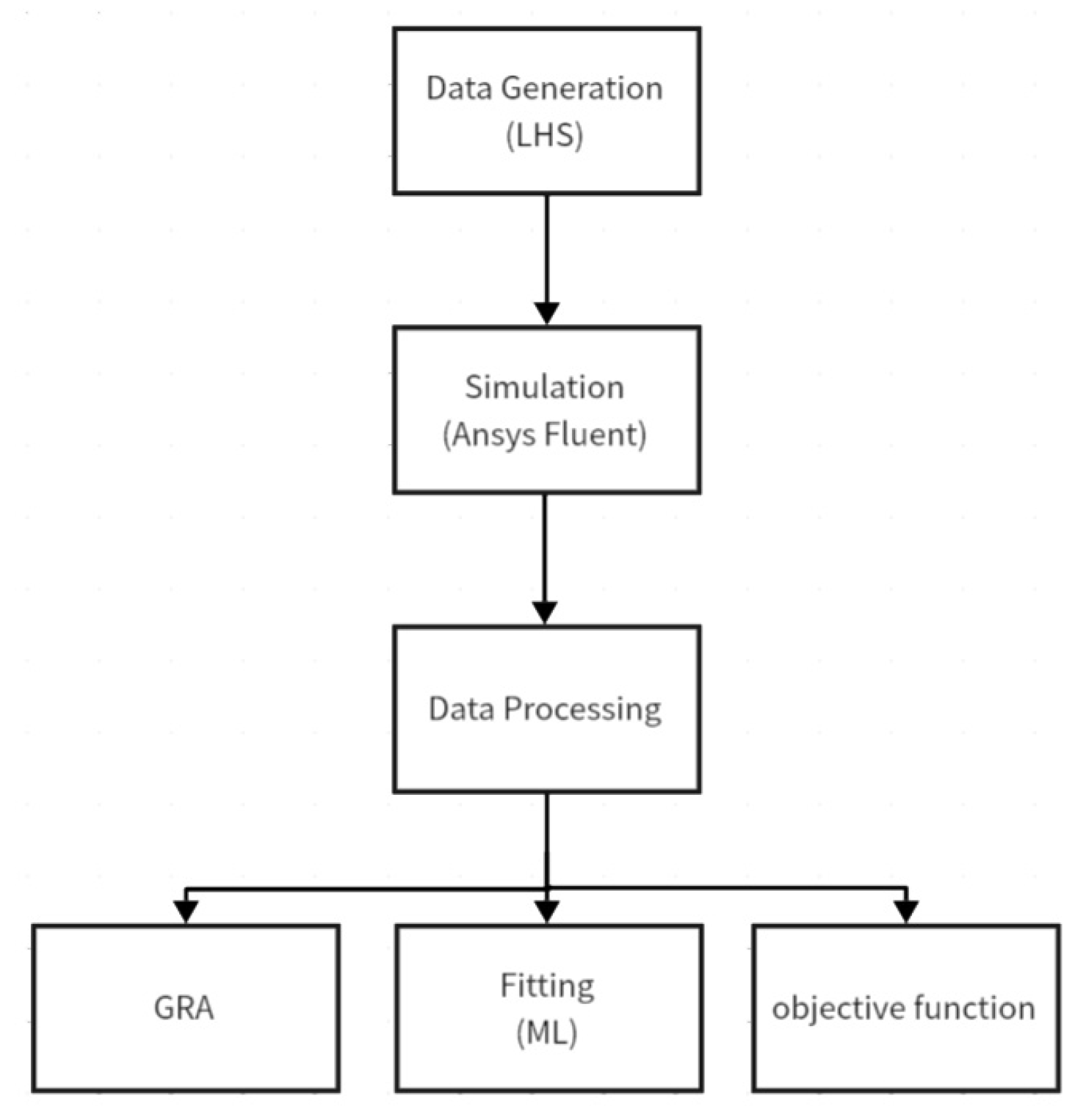
2.6. Research Process
2.6.1. Main Research Process
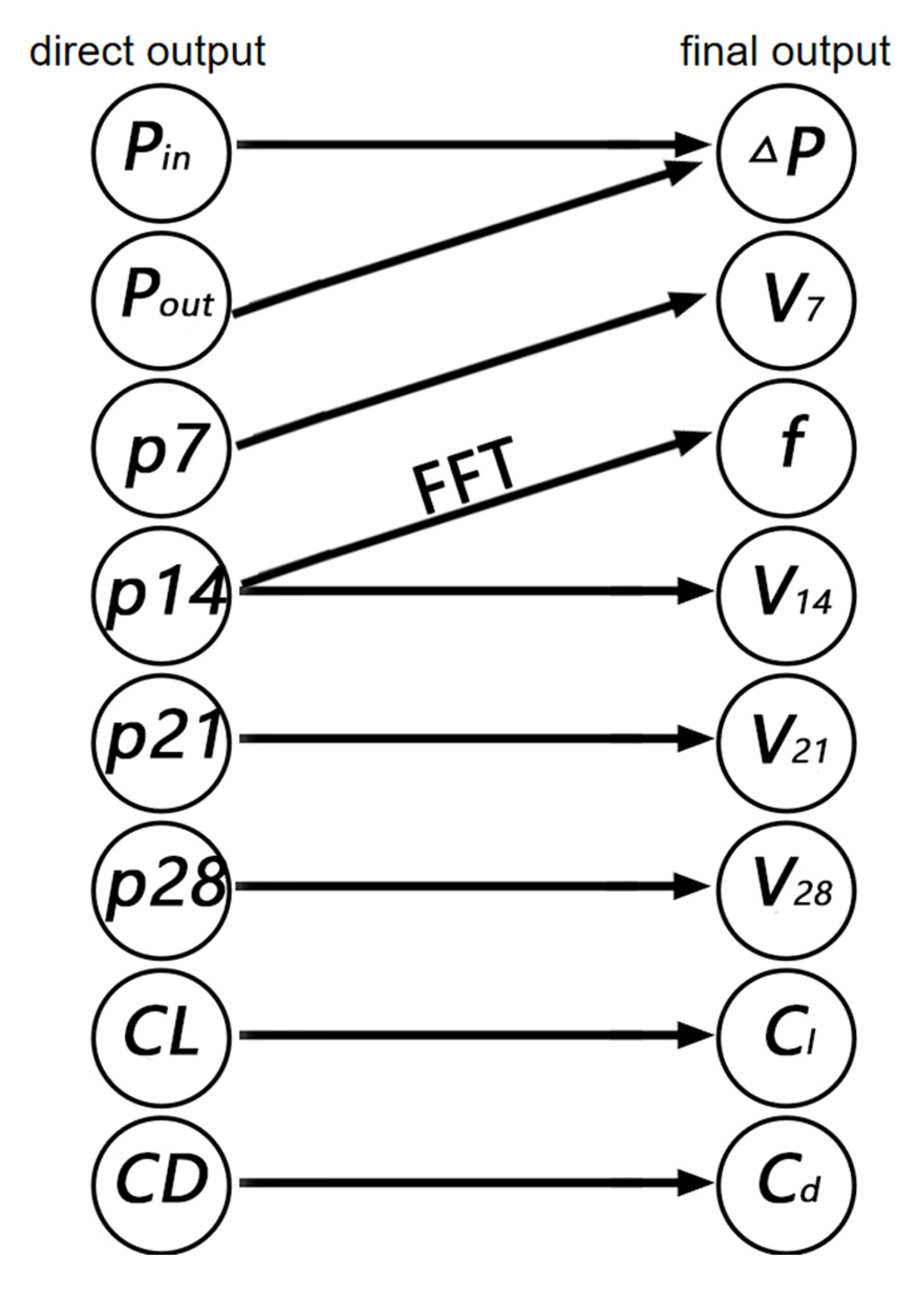
2.6.2. Preliminary Data Processing
| V7 | Average peak value of envelope curve of y-direction velocity–time curve at p7 |
| V14 | Average peak value of envelope curve of y-direction velocity–time curve at p14, which shows the strength of probe signal |
| V21 | Average peak value of envelope curve of y-direction velocity–time curve at p21 |
| V28 | Average peak value of envelope curve of y-direction velocity–time curve at p28 |
| ΔP | The difference between Pin and Pout, represents the pressure loss of the system |
| f | The result of FFT of y-direction velocity–time curve at p7 (probe), showing the frequency of velocity |
| Cl | Average peak value of envelope curve of lift coefficient-time curve at p7 |
| Cd | Average peak value of envelope curve of drag coefficient-time curve at p7 |
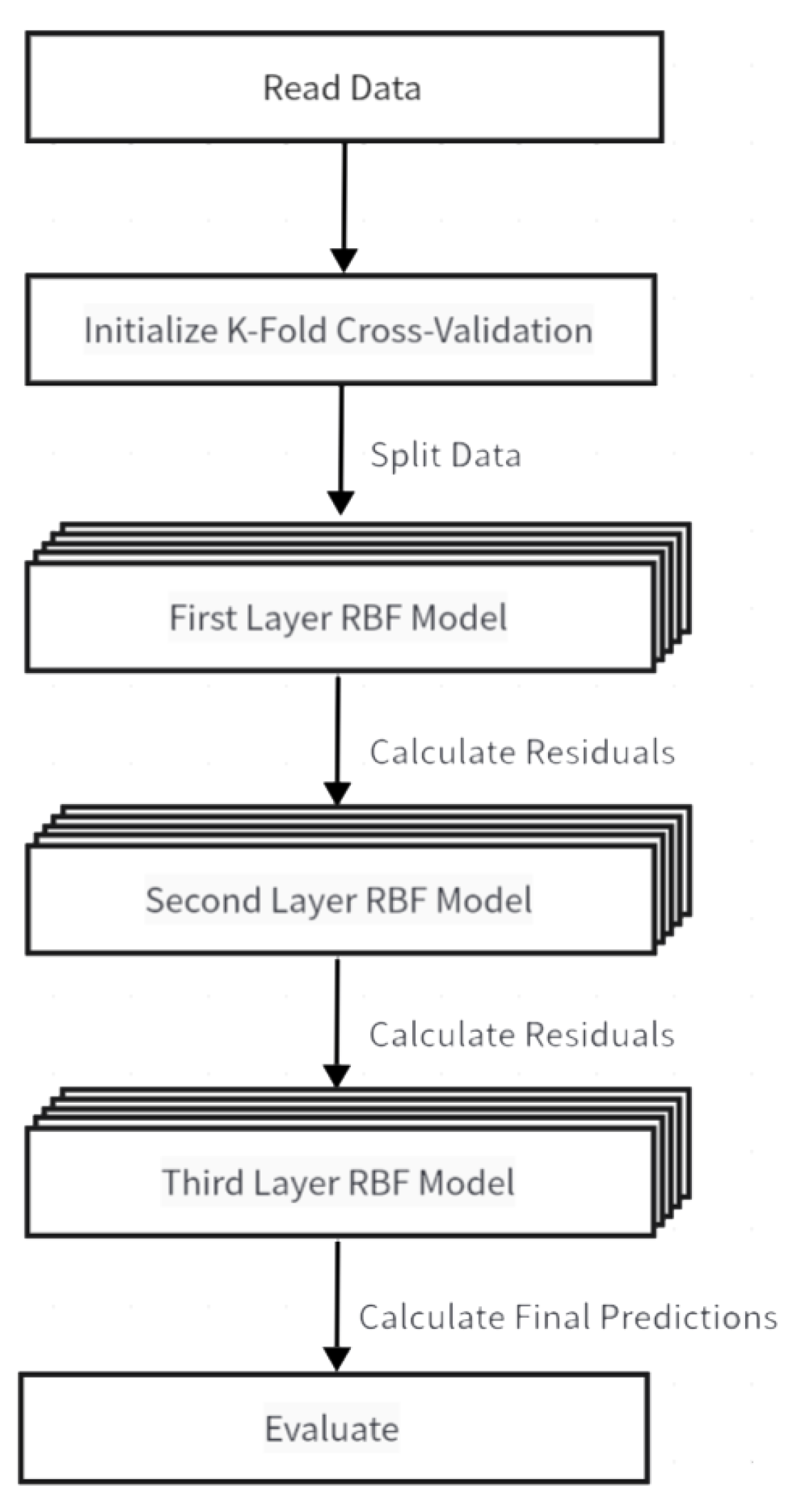
2.6.3. Fitting Modeling Principles
2.6.4. KRR Parameter Validation
3. Data Analysis
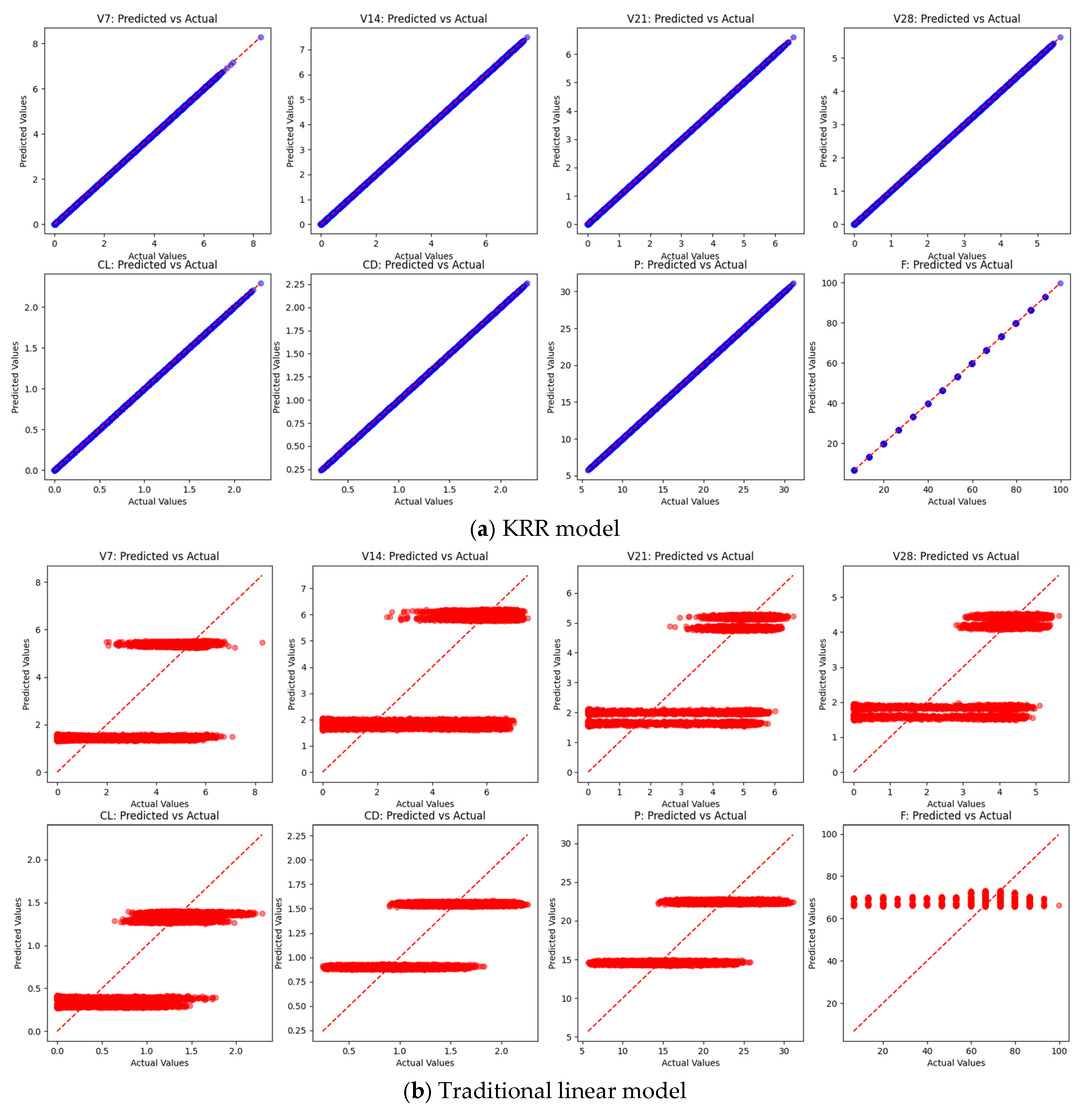
3.1. Fit Results and Comparison
3.2. Correlation Analysis
3.2.1. GRA
3.2.2. Objective Function Analysis
3.2.3. CFD Analysis
3.2.4. Correlation Discussion
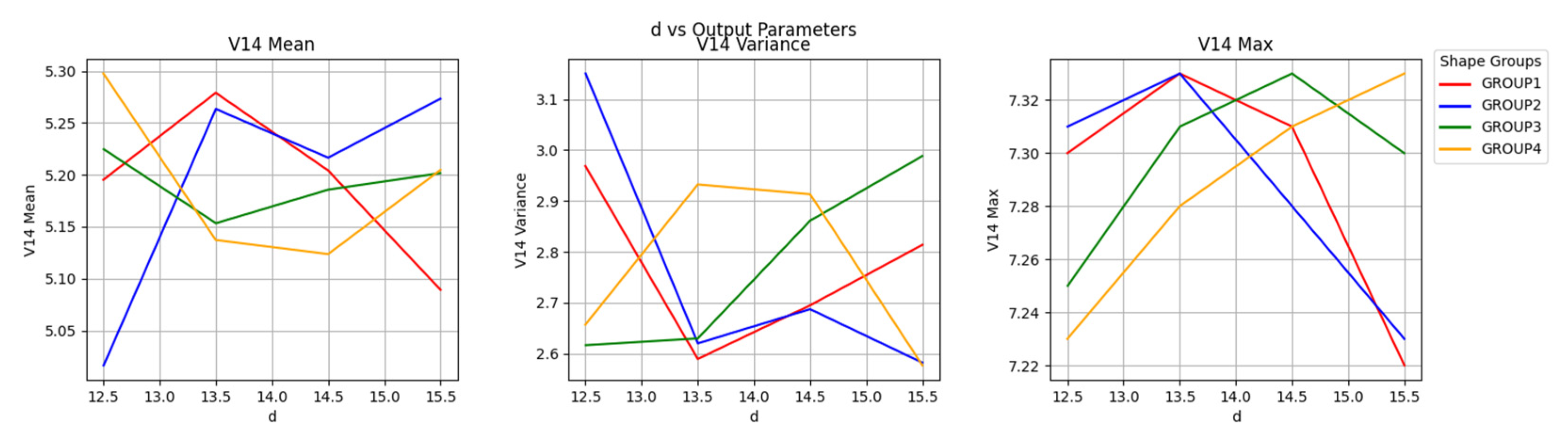
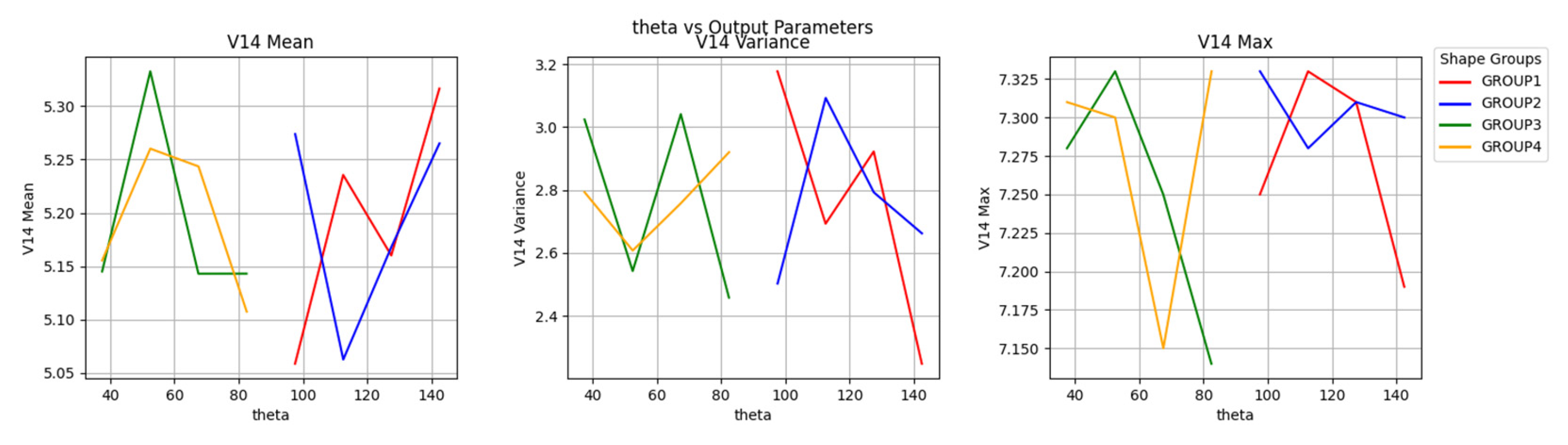
- The results of GRA indicate that the trailing edge angle (θ) and upstream width (d) have the strongest correlation with frequency (r > 0.9). This strong correlation suggests that these parameters play a significant role in determining the vortex shedding frequency, which is a key performance indicator for vortex flowmeters. Specifically, an increase in θ and d leads to an increase in frequency. This finding aligns with the theoretical principles of boundary layer separation and vortex shedding, where the geometry of the bluff body directly influences the formation and stability of vortices.
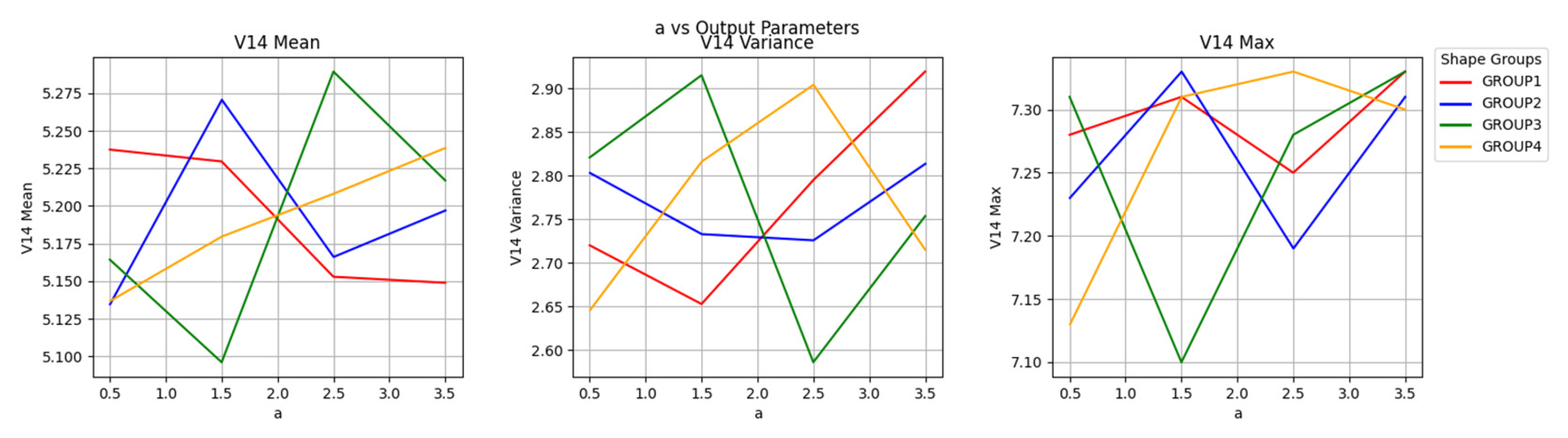
- The transition edge length (a) significantly affects the velocity distribution around the bluff body. The results indicate that increasing a suppresses the influence of the shape of the countercurrent surface, suggesting that the guiding effect of a on the airflow dominates the output performance. This highlights the crucial role of a in directing the flow around the bluff body, thereby influencing overall performance.
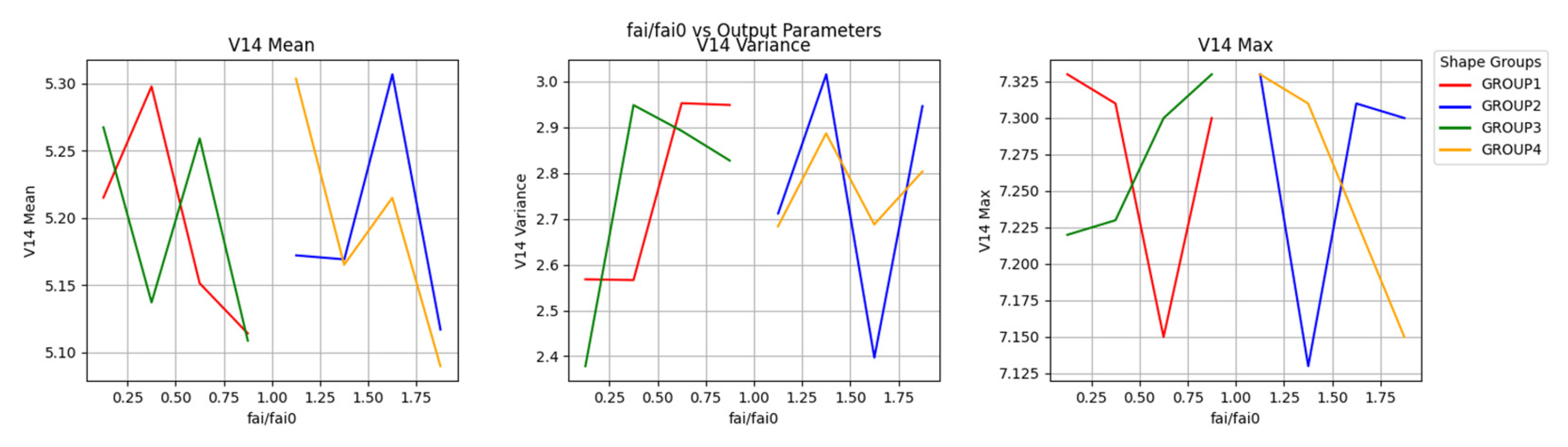
- The bluff body length (b) also significantly affects the velocity distribution and vortex street characteristics. For instance, in some cases, an increase in b to 17 mm results in the maximum value of V14, while in other scenarios, an increase to 19 mm leads to an extreme value of V14. This suggests that the pressure field distribution, influenced by the shape of the bluff body, plays a role in these observations. Therefore, careful consideration of the value of b is necessary to optimize the performance of vortex flowmeters.
- The downstream width (c) also impacts the velocity distribution, especially when the countercurrent surface is concave. The results show that increasing c to 3.5 mm leads to a significant drop in the maximum value of V14, while the mean and variance remain almost unchanged. This suggests that the turbulent separation characteristics change abruptly under this condition, resulting in a sharp drop in the minimum value of V14. This finding underscores the importance of carefully selecting the downstream width to optimize the performance of vortex flowmeters.
- The shape parameters (shape1 and shape2) define the curvature of the forward and backward arcs of the bluff body, respectively. These parameters influence the flow characteristics around the bluff body, thereby affecting vortex formation and stability. The results show that the shape parameters have a moderate correlation with the performance indicators, indicating that the curvature of the arcs plays a role in determining flow dynamics. For example, a convex forward arc (shape1 = 1) results in a smaller deceleration zone in front of the bluff body and lower maximum velocities on both sides while increasing the width of the vortex street. This suggests that the convex arc may have a better guiding effect on the flow, directing it toward the sides and thereby increasing the actual effective length of the bluff body.
- Similarly, a convex backward arc (shape2 = 1) leads to a smaller low-speed zone behind the bluff body and a larger vortex street length. This indicates that the curvature of the backward arc influences flow separation and reattachment, thereby affecting the overall performance of the vortex flowmeter.
4. Conclusions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CFD | Computational Fluid Dynamics |
| DFT | Discrete Fourier Transform |
| FFT | Fast Fourier Transform |
| GRA | Grey Relation Analysis |
| K-Fold CV | K-Fold Cross-Validation |
| KRR | Kernel Ridge Regression |
| LES | Large Eddy Simulation |
| LHS | Latin Hypercube Sampling |
| MAE | Mean Absolute Error |
| MSE | Mean Squared Error |
| ML | Machine Learning |
| RANS | Reynolds-Averaged Navier–Stokes |
| RMSE | Root Mean Squared Error |
| RNG | Renormalization Group |
References
- Kármán, T.V. Über den Mechanismus des Wiederstandes, den ein bewegter Körper in einer Flüssigkeit erfahrt. Nachrichten Ges. Wiss. Göttingen Math. Phys. Kl. 1912, 1912, 547–556. [Google Scholar]
- Miau, J.J.; Yang, C.C.; Chou, J.H.; Lee, K.R. A T-shaped vortex shedder for a vortex flow-meter. Flow Meas. Instrum. 1993, 4, 259–267. [Google Scholar] [CrossRef]
- Coulthard, J.; Yan, Y. Comparisons of Different Bluff Bodies in Vortex Wake Transit Time Measurements. Flow Meas. Instrum. 1993, 4, 273–275. [Google Scholar] [CrossRef]
- Baker, R.C. Flow Measurement Handbook; Cambridge University Press: New York, NY, USA, 2000. [Google Scholar]
- Miller, R.W.; De Carlo, J.P.; Gullen, J.T. A vortex flowmeter—Calibration results and application experience. Proc. Flow-Con. 1977, 2, 341–371. [Google Scholar]
- Kremlevskiy, P.P. Flowmeters and Counters; Mashinostroenie: Leningrad, Russia, 1989. [Google Scholar]
- Sun, Z. Numerical Simulation and Experimental Study of Vortex Frequency Detection Method for Vortex Flowmeter Based on Differential Pressure Principle. Master’s Thesis, Central South University, Changsha, China, 2004. [Google Scholar]
- Venugopal, A.; Agrawal, A.; Prabhu, S.V. Influence of blockage and shape of a bluff body on the performance of vortex flowmeter with wall pressure measurement. Measurement 2011, 44, 954–964. [Google Scholar] [CrossRef]
- Du, P. Numerical Simulation of Vortex Shedding Frequency in Vortex Flowmeter. Master’s Thesis, Northeast Petroleum University, Daqing, China, 2015. [Google Scholar]
- Venugopal, A.; Agrawal, A.; Prabhu, S.V. On the linearity, turndown ratio, and shape of the bluff body for vortex flowmeter. Measurement 2019, 137, 477–483. [Google Scholar] [CrossRef]
- Krivonogov, A.; Kartashev, A.; Kartasheva, M. System for Computer Simulation and Optimization of Vortex Flows. In Proceedings of the 2020 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), Sochi, Russia, 15–17 July 2020; pp. 1–6. [Google Scholar]
- Rzasa, M.R.; Czapla-Nielacna, B. Analysis of the influence of the vortex shedder shape on the metrological properties of the vortex flow meter. Sensors 2021, 21, 4697. [Google Scholar] [CrossRef]
- Končar, B.; Sotošek, J.; Bajsić, I. Experimental verification and numerical simulation of a vortex flowmeter at low Reynolds numbers. Flow Meas. Instrum. 2022, 88, 102278. [Google Scholar] [CrossRef]
- Shen, C.; Feng, S.; Zhu, Y.; Jin, K. Numerical simulation of pressure tapping location of precession vortex flowmeter based on CFX. J. Drain. Irrig. Mach. Eng. 2023, 41, 487–492. [Google Scholar]
- Lur’e, M.S.; Lur’e, O.M.; Slashchinin, D.G.; Frolov, A.S.; Chernov, V.A. Modernization of the Vortex Flowmeter with a Trapezoidal Bluff Body and a Feedback Channel. Steel Transl. 2024, 54, 288–292. [Google Scholar] [CrossRef]
- Farsad, S.; Parpanchi, S.M.; Rezaei, M. Experimental study of vortex shedding phenomenon induced by various bluff body geometries for use in vortex flowmeters. Eur. J. Mech.—B/Fluids 2025, 111, 188–200. [Google Scholar] [CrossRef]
- Zhang, W.; Kong, M.; Zhang, Y.; Fathollahi-Fard, A.M.; Tian, G. A revised deep reinforcement learning algorithm for parallel machine scheduling problem under multi-scenario due date constraints. Swarm Evol. Comput. 2025, 92, 101808. [Google Scholar]
- Ren, Y.; Meng, L.; Tian, G.; Li, Z.; Li, Y. An efficient m-step lookahead rollout algorithm for profit-oriented selective disassembly sequence planning with operation stochastic failure. Eng. Appl. Artif. Intell. 2025, 145, 110173. [Google Scholar] [CrossRef]
- Ling, J.; Templeton, J. Evaluation of machine learning algorithms for prediction of regions of high Reynolds averaged Navier Stokes uncertainty. Phys. Fluids 2015, 27, 085103. [Google Scholar]
- Duraisamy, K.; Iaccarino, G.; Xiao, H. Turbulence modeling in the age of data. Annu. Rev. Fluid Mech. 2019, 51, 357–377. [Google Scholar] [CrossRef]
- Zhu, L.; Zhang, W.; Kou, J.; Liu, Y. Machine learning methods for turbulence modeling in subsonic flows around airfoils. Phys. Fluids 2019, 31, 015105. [Google Scholar] [CrossRef]
- Hadi, A.A.; Ahmed, S.R.; Abbas, S.K.; Al-Sharify, Z.T.; Fuqdan, A.I.; Ahmad, B.A.; Khider, A.I.; Algburi, S.; Shin, J. Machine Learning Techniques for Turbulence Analysis and Simulation. In Proceedings of the 2024 8th International Symposium on Innovative Approaches in Smart Technologies (ISAS), İstanbul, Türkiye, 12–14 September 2024; pp. 1–7. [Google Scholar]
- Raibaudo, C.; Zhong, P.; Noack, B.R.; Martinuzzi, R.J. Machine learning strategies applied to the control of a fluidic pinball. Phys. Fluids 2020, 32, 015108. [Google Scholar]
- Jin, X.; Cheng, P.; Chen, W.-L.; Li, H. Prediction model of velocity field around circular cylinder over various Reynolds numbers by fusion convolutional neural networks based on pressure on the cylinder. Phys. Fluids 2018, 30, 047105. [Google Scholar] [CrossRef]
- Tang, H.; Rabault, J.; Kuhnle, A.; Wang, Y.; Wang, T. Robust active flow control over a range of Reynolds numbers using an artificial neural network trained through deep reinforcement learning. Phys. Fluids 2020, 32, 053605. [Google Scholar]
- Li, H.; Tan, J.; Gao, Z.; Noack, B.R. Machine learning open-loop control of a mixing layer. Phys. Fluids 2020, 32, 111701. [Google Scholar]
- Wu, Z.; Fan, D.; Zhou, Y.; Li, R.; Noack, B.R. Jet mixing optimization using machine learning control. Exp. Fluids 2018, 59, 131. [Google Scholar]
- Guo, X.; Li, W.; Iorio, F. Convolutional neural networks for steady flow approximation. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 481–490. [Google Scholar]
- Sekar, V.; Khoo, B.C. Fast flow field prediction over airfoils using deep learning approach. Phys. Fluids 2019, 31, 057103. [Google Scholar]
- Jiang, C.; Yang, R.; Xu, Q.; Yao, H.; Ho, T.-Y.; Yuan, B. A Cooperative Multiagent Reinforcement Learning Framework for Droplet Routing in Digital Microfluidic Biochips. IEEE Trans. Comput. Aided Des. Integr. Circuits Syst. 2023, 42, 3007–3020. [Google Scholar]
- Zhang, Y.; Sung, W.-J.; Mavris, D. Application of Convolutional Neural Network to Predict Airfoil Lift Coefficient. J. Aircraft 2018, 55, 1023–1034. [Google Scholar]
- Thummar, D.; Reddy, Y.J.; Venugopal, A. Machine learning for vortex flowmeter design. IEEE Trans. Instrum. Meas. 2021, 71, 1–8. [Google Scholar]
- Sudharsan, B.; Peeples, M.; Shomali, M. Hypoglycemia prediction using machine learning models for patients with type 2 diabetes. J. Diabetes Sci. Technol. 2015, 9, 86–90. [Google Scholar]
- Georga, E.I.; Protopappas, V.C.; Ardigò, D.; Polyzos, D.; Fotiadis, D.I. A glucose model based on support vector regression for the prediction of hypoglycemic events under free-living conditions. Diabetes Technol. Ther. 2013, 15, 634–643. [Google Scholar]
- Si, X.; Shen, Y.; Bao, J. Simulation study of triangular vortex generator in vortex flowmeter based on CFD. Electron. Meas. Technol. 2020, 43, 6–9. [Google Scholar]
- Mckay, M.D.; Beckman, R.J.; Conover, W.J. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 1979, 21, 239–245. [Google Scholar]
- Venugopal, A.; Agrawal, A.; Prabhu, S.V. Vortex dynamics of a trapezoidal bluff body placed inside a circular pipe. J. Turbul. 2018, 19, 1–24. [Google Scholar]
- Yang, L.J.; Zhang, B.H.; Ye, X.Z. Fast Fourier Transform (FFT) and its applications. Opto-Electron. Eng. 2004, 2004, 1–3+7. [Google Scholar]
- Cawley, G.C.; Talbot, N.L.C. Optimizing sparse kernel ridge regression hyperparameters based on leave-one-out cross-validation. In Proceedings of the 2008 IEEE International Joint Conference on Neural Networks, Hong Kong, China, 1–8 June 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 2981–2987. [Google Scholar]
- Caponnetto, A.; De Vito, E. Optimal rates for the regularized least-squares algorithm. Found. Comput. Math. 2007, 7, 331–368. [Google Scholar] [CrossRef]
- Vapnik, V.N. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Orsenigo, C.; Vercellis, C. Kernel ridge regression for out-of-sample mapping in supervised manifold learning. Expert Syst. Appl. 2012, 39, 7757–7762. [Google Scholar] [CrossRef]
- Cawley, G.C.; Talbot, N.L.C. On over-fitting in model selection and subsequent selection bias in performance evaluation. J. Mach. Learn. Res. 2010, 11, 2079–2107. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cells | 12,073 | 20,893 | 23,454 | 25,379 | 28,107 |
|---|---|---|---|---|---|
| 4.86033 | 4.88430 | 4.90668 | 4.98842 | 5.00682 | |
| err | −2.93% | −2.45% | −2.00% | −0.37% | -- |
| α\γ | 0.001 | 0.01 | 0.1 | 1 | 10 |
|---|---|---|---|---|---|
| 0.001 | 2.252984 | 3.257195 | 4.573021 | 15.77358 | 17.213374 |
| 0.01 | 2.226058 | 2.663419 | 4.309725 | 15.78435 | 17.213387 |
| 0.1 | 2.208787 | 2.383252 | 3.566977 | 15.8839 | 17.213505 |
| 1 | 2.241499 | 2.283818 | 3.180383 | 16.4318 | 17.214113 |
| 10 | 2.340610 | 2.343677 | 5.973044 | 17.062324 | 17.214735 |
| α\γ | 0.001 | 0.01 | 0.1 | 1 | 10 |
|---|---|---|---|---|---|
| 0.001 | 2.154387 | 3.057694 | 4.165838 | 2.090351 | 2.074577 |
| 0.01 | 2.119666 | 2.498945 | 3.863205 | 2.090066 | 2.074577 |
| 0.1 | 2.098079 | 2.263090 | 2.999811 | 2.087597 | 2.074579 |
| 1 | 2.085735 | 2.149949 | 2.301291 | 2.078392 | 2.074594 |
| 10 | 2.079093 | 2.097154 | 2.093280 | 2.074679 | 2.074609 |
| α\γ | 0.001 | 0.01 | 0.1 | 1 | 10 |
|---|---|---|---|---|---|
| 0.001 | 2.150070 | 3.051704 | 4.158544 | 2.086428 | 2.070426 |
| 0.01 | 2.115421 | 2.494018 | 3.856163 | 2.086142 | 2.070426 |
| 0.1 | 2.093876 | 2.258582 | 2.994172 | 2.083657 | 2.070427 |
| 1 | 2.081551 | 2.145628 | 2.296846 | 2.074360 | 2.070434 |
| 10 | 2.074920 | 2.092930 | 2.089104 | 2.070538 | 2.070443 |
| Parameter | MSE | RMSE | MAE | R2 | CV_RMSE_Mean | CV_RMSE_Std |
|---|---|---|---|---|---|---|
| V7 | 1.99188 × 10−12 | 1.41134 × 10−6 | 1.08746 × 10−6 | 1 | 1.41115 × 10−6 | 2.33328 × 10−8 |
| V14 | 2.79998 × 10−12 | 1.67331 × 10−6 | 1.27968 × 10−6 | 1 | 1.67308 × 10−6 | 2.79461 × 10−8 |
| V21 | 2.27284 × 10−12 | 1.5076 × 10−6 | 1.16655 × 10−6 | 1 | 1.50745 × 10−6 | 2.06001 × 10−8 |
| V28 | 1.7352 × 10−12 | 1.31727 × 10−6 | 1.04012 × 10−6 | 1 | 1.31719 × 10−6 | 1.47638 × 10−8 |
| Cl | 1.17433 × 10−13 | 3.42684 × 10−7 | 2.77535 × 10−7 | 1 | 3.42625 × 10−7 | 6.35703 × 10−9 |
| Cd | 8.95391 × 10−14 | 2.99231 × 10−7 | 2.48035 × 10−7 | 1 | 2.99194 × 10−7 | 4.69762 × 10−9 |
| ΔP | 1.40444 × 10−11 | 3.74759 × 10−6 | 3.09747 × 10−6 | 1 | 3.74706 × 10−6 | 6.26793 × 10−8 |
| f | 1.57333 × 10−10 | 1.25433 × 10−5 | 7.53052 × 10−6 | 1 | 1.25345 × 10−5 | 4.68339 × 10−7 |
| Parameters | V7 | V14 | V21 | V28 | ΔP | f | Cl | Cd |
|---|---|---|---|---|---|---|---|---|
| a | 0.765 | 0.772 | 0.781 | 0.787 | 0.789 | 0.791 | 0.772 | 0.790 |
| b | 0.721 | 0.725 | 0.730 | 0.734 | 0.725 | 0.719 | 0.732 | 0.730 |
| c | 0.733 | 0.736 | 0.741 | 0.743 | 0.733 | 0.726 | 0.742 | 0.738 |
| d | 0.787 | 0.801 | 0.824 | 0.840 | 0.864 | 0.908 | 0.800 | 0.852 |
| φ | 0.766 | 0.772 | 0.781 | 0.788 | 0.792 | 0.791 | 0.773 | 0.793 |
| θ | 0.790 | 0.803 | 0.827 | 0.844 | 0.870 | 0.931 | 0.801 | 0.856 |
| shape1 | 0.610 | 0.620 | 0.631 | 0.638 | 0.633 | 0.664 | 0.629 | 0.632 |
| shape2 | 0.614 | 0.620 | 0.631 | 0.638 | 0.633 | 0.664 | 0.629 | 0.632 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H. Bluff Body Size Parameters and Vortex Flowmeter Performance: A Big Data-Based Modeling and Machine Learning Methodology. Symmetry 2025, 17, 510. https://doi.org/10.3390/sym17040510
Yu H. Bluff Body Size Parameters and Vortex Flowmeter Performance: A Big Data-Based Modeling and Machine Learning Methodology. Symmetry. 2025; 17(4):510. https://doi.org/10.3390/sym17040510
Chicago/Turabian StyleYu, Haoran. 2025. "Bluff Body Size Parameters and Vortex Flowmeter Performance: A Big Data-Based Modeling and Machine Learning Methodology" Symmetry 17, no. 4: 510. https://doi.org/10.3390/sym17040510
APA StyleYu, H. (2025). Bluff Body Size Parameters and Vortex Flowmeter Performance: A Big Data-Based Modeling and Machine Learning Methodology. Symmetry, 17(4), 510. https://doi.org/10.3390/sym17040510