
Discrete-Time Dynamical Systems on Structured State Spaces: State-Transition Laws in Finite-Dimensional Lie Algebras


{kind=link}
Abstract
1. Introduction
2. Lie-Algebra Signals and Discrete-Time Linear Systems on Finite-Dimensional Lie Algebras
2.1. Notation and Definitions
- Bilinearity: , for all scalars and all elements .
- Alternativity: for all .
- The Jacobi identity: for all .
- Identity endomorphism: It is denoted by and is defined by , for every .
- Scaling endomorphism: It is denoted by and is defined by , for any given .
- Inverse of an endomorphism: Given an endomorphism , its inverse is denoted by and is such that . The notion of inverse of an endomorphism may be generalized in several ways. For example, the g-inverse of an endomorphism is denoted by and is such that [41].
- Adjoint endomorphism: It is denoted by and is defined by , for a given element . (In matrix Lie algebras, the Lie brackets coincide with the matrix commutator.)
- Adjoint of an endomorphism induced by the inner product structure. Given an element , its adjoint with respect to the inner product is the unique element such that for every . Given two endomorphisms , it holds that .
- Linear combination of endomorphisms: The -linear combination of two endomorphisms is a new endomorphism, namely, given two scalars , it holds that . In fact, the space is closed under multiplication by a complex-valued constant and under addition.
2.2. Finite-Dimensional Lie-Algebra Signals and Lie-Algebra Linear Systems
3. Structural Properties of the LA·LTI System
3.1. System Transfer Endomorphism, Zeros, Poles and Impulse Response
3.2. Canonical Interconnections of Systems, “bibs” Stability and Causality
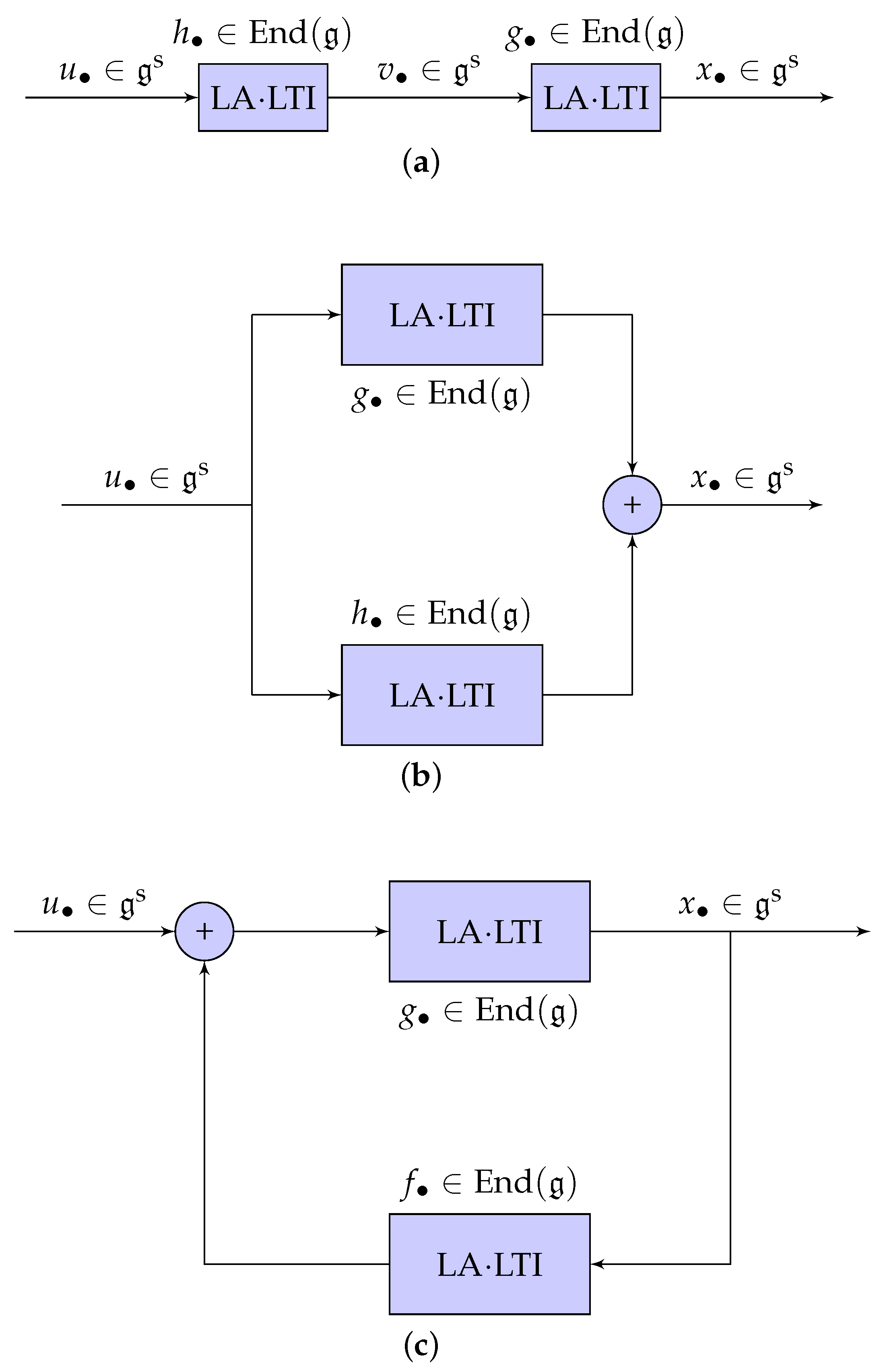
- Cascade connection: Given two LA·LTI subsystems with impulse responses and , their cascade connection, presented in Figure 1a, is an LA·LTI system with impulse response . The system transfer endomorphism of a cascade is given by .
- Parallel connection: Given two LA·LTI subsystems with impulse responses and , their parallel connection, presented in Figure 1b, is an LA·LTI system with impulse response .The system transfer endomorphism of a parallel connection is given by .
- Feedback connection: Given two LA·LTI subsystems with impulse responses and , their feedback connection, presented in Figure 1c, is an LA·LTI system with impulse response . In fact, the overall state sequence is related with the overall input sequence by . The system transfer endomorphism of a feedback connection is given by .
3.3. Correlation Functions and Power Spectra
4. A Case Study: The LA·LTI () System
4.1. Discussion on Stability
4.2. Discussion on Attainability
4.3. System Transfer Endomorphism
5. Conclusions and Future Directions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hsu, P. Schaum’s Theory and Problems: Signals and Systems; McGraw-Hill: New York, NY, USA, 1995. [Google Scholar]
- Lathi, B. Signal Processing & Linear Systems; Berkeley-Cambridge Press: New York, NY, USA, 1998. [Google Scholar]
- Kalman, R.; Falb, P.; Arbib, M.A. Topics in Mathematical System Theory; McGraw Hill: New York, NY, USA, 1969. [Google Scholar]
- Oppenheim, A.; Schafer, R. Digital Signal Processing; Prentice Hall: Hoboken, NJ, USA, 1975. [Google Scholar]
- Macauley, M.; Mortveit, H. Cycle equivalence of graph dynamical systems. Nonlinearity 2009, 22, 421–436. [Google Scholar] [CrossRef]
- Fiori, S. Model formulation over Lie groups and numerical methods to simulate the motion of gyrostats and quadrotors. Mathematics 2019, 7, 935. [Google Scholar] [CrossRef]
- Jurdjevic, V. Optimal control on Lie groups and integrable Hamiltonian systems. Regul. Chaotic Dyn. 2011, 16, 514–535. [Google Scholar] [CrossRef]
- Leonard, N.; Krishnaprasad, P. Control of Switched Electrical Networks Using Averaging on Lie Groups. In Proceedings of the 33rd IEEE Conference on Decision and Control, Lake Buena Vista, FL, USA, 14–16 December 1994; pp. 1919–1924. [Google Scholar]
- Tyagi, A.; Davis, J. A recursive filter for linear systems on Riemannian manifolds. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar] [CrossRef]
- Zhang, Z.; Sarlette, A.; Ling, Z. Integral control on Lie groups. Syst. Control Lett. 2015, 80, 9–15. [Google Scholar] [CrossRef]
- Navarro-Moreno, J. ARMA prediction of widely linear systems by using the innovations algorithm. IEEE Trans. Signal Process. 2008, 56, 3061–3068. [Google Scholar] [CrossRef]
- Took, C.; Mandic, D. The quaternion LMS algorithm for adaptive filtering of hypercomplex processes. IEEE Trans. Signal Process. 2009, 57, 1316–1327. [Google Scholar] [CrossRef]
- Campoamor-Stursberg, O.R.; Gascon, F.G.; Peralta-Salas, D. Dynamical systems embedded into Lie algebras. J. Math. Phys. 2001, 42, 5741–5752. [Google Scholar] [CrossRef]
- Seifert, L.; Orth, D.; Boulanger, J.; Dovgalecs, V.; Hérault, R.; Davids, K. Climbing skill and complexity of climbing wall design: Assessment of jerk as a novel indicator of performance fluency. J. Appl. Biomech. 2014, 30, 619–625. [Google Scholar] [CrossRef]
- Jurdjevic, V.; Sussmann, H. Control systems on Lie groups. J. Differ. Equ. 1972, 12, 313–329. [Google Scholar] [CrossRef]
- Jouan, P. Equivalence of control systems with linear systems on Lie groups and homogeneous spaces. ESAIM Control Optim. Calc. Var. 2010, 16, 956–973. [Google Scholar] [CrossRef]
- Liu, Y.; Geng, Z. Finite-time optimal tracking control for dynamic systems on Lie groups. Asian J. Control 2015, 17, 994–1005. [Google Scholar] [CrossRef]
- Maithripala, D.; Dayawansa, W.; Berg, J. Intrinsic observer-based stabilization for simple mechanical systems on Lie groups. SIAM J. Control Optim. 2005, 44, 1691–1711. [Google Scholar] [CrossRef]
- Monroy-Pérez, F.; Anzaldo-Meneses, A. Optimal control on nilpotent Lie groups. J. Dyn. Control Syst. 2002, 8, 487–504. [Google Scholar] [CrossRef]
- Saccon, A.; Hauser, J.; Aguiar, A. Optimal control on Lie groups: The projection operator approach. IEEE Trans. Autom. Control 2013, 58, 2230–2245. [Google Scholar] [CrossRef]
- Ayala, V.; Santana, A.J.; Stelmastchuk, S.N.; Verdi, M.A. Solutions of linear control systems on Lie groups. Open Math. 2024, 22, 20240098. [Google Scholar] [CrossRef]
- Ayala, V.; Todco, M.T. Boundedness control sets for linear systems on Lie groups. Open Math. 2018, 16, 370–379. [Google Scholar] [CrossRef]
- Banks, S. The Lie algebra of a nonlinear dynamical system and its application to control. Int. J. Syst. Sci. 2001, 32, 157–174. [Google Scholar] [CrossRef]
- Jouan, P. Controllability of linear systems on Lie groups. J. Dyn. Control Syst. 2011, 17, 591–616. [Google Scholar] [CrossRef]
- Vershik, A.M. Lie algebras generated by dynamical systems. Algebra Anal. 1992, 4, 103–113. [Google Scholar]
- Agrachev, A.; Liberzon, D. Lie-algebraic conditions for exponential stability of switched systems. In Proceedings of the 38th IEEE Conference on Decision and Control (Cat. No.99CH36304), Phoenix, AZ, USA, 7–10 December 1999; Volume 3, pp. 2679–2684. [Google Scholar] [CrossRef]
- Albertini, F.; D’Alessandro, D. The Lie algebra structure and controllability of spin systems. Linear Algebra Its Appl. 2002, 350, 213–235. [Google Scholar] [CrossRef]
- Dominguez, J.C.; de Farias, I.; Morales, J.A. Toward a Quantum Computing Formulation of the Electron Nuclear Dynamics Method via Fukutome Unitary Representation. Symmetry 2025, 17, 303. [Google Scholar] [CrossRef]
- Lecamwasam, R.; Iakovleva, T.; Twamley, J. Quantum metrology with linear Lie algebra parameterizations. Phys. Rev. Res. 2024, 6, 043137. [Google Scholar] [CrossRef]
- Qvarfort, S.; Pikovski, I. Solving Quantum Dynamics with a Lie-Algebra Decoupling Method. PRX Quantum 2025, 6, 010201. [Google Scholar] [CrossRef]
- Coelho, P.; Nunes, U. Lie algebra application to mobile robot control: A tutorial. Robotica 2003, 21, 483–493. [Google Scholar] [CrossRef]
- Guo, N.; Zhang, H.; Li, X.; Cui, X.; Liu, Y.; Pan, J.; Song, Y.; Zhang, Q. Enhancing Continuum Robotics Accuracy Using a Particle Swarm Optimization Algorithm and Closed-Loop Wire Transmission Model for Minimally Invasive Thyroid Surgery. Appl. Sci. 2025, 15, 2170. [Google Scholar] [CrossRef]
- Torres Alberto, N.; Joseph, L.; Padois, V.; Daney, D. A linearization method based on Lie algebra for pose estimation in a time horizon. In Proceedings of the ARK 2022—18th International Symposium on Advances in Robot Kinematics, Bilbao, Spain, 26–30 June 2022. [Google Scholar]
- Zhou, Y.; Polyakov, A.; Zheng, G. Homogeneous Finite-time Tracking Control on Lie Algebra so(3). In Proceedings of the ECC 2022— European Control Conference, London, UK, 12–15 July 2022. [Google Scholar]
- Hussain, A.; Usman, M.; Zidan, A.M.; Sallah, M.; Owyed, S.; Rahimzai, A.A. Dynamics of invariant solutions of the DNA model using Lie symmetry approach. Sci. Rep. 2024, 14, 11920. [Google Scholar] [CrossRef]
- Chen, J.; Huang, Z.; Tian, Q. A multisymplectic Lie algebra variational integrator for flexible multibody dynamics on the special Euclidean group SE(3). Mech. Mach. Theory 2022, 174, 104918. [Google Scholar] [CrossRef]
- Holzinger, S.; Arnold, M.; Gerstmayr, J. Evaluation and implementation of Lie group integration methods for rigid multibody systems. Multibody Syst. Dyn. 2024, 62, 273–306. [Google Scholar] [CrossRef]
- Litvinov, V. Variational formulation of the problem on vibrations of a beam with a moving spring-loaded support. Theor. Math. Phys. 2023, 215, 709–715. [Google Scholar] [CrossRef]
- Fiori, S. Lie-group modeling and simulation of a spherical robot, actuated by a yoke–pendulum system, rolling over a flat surface without slipping. Robot. Auton. Syst. 2024, 175, 104660. [Google Scholar] [CrossRef]
- Fiori, S.; Sabatini, L.; Rachiglia, F.; Sampaolesi, E. Modeling, simulation and control of a spacecraft: Automated reorientation under directional constraints. Acta Astronaut. 2024, 216, 214–228. [Google Scholar] [CrossRef]
- Zekraoui, H. Index of a generalized inverse of an endomorphism. Appl. Sci. 2013, 15, 118–124. [Google Scholar]
- Brockett, R. Dynamical systems that sort lists, diagonalize matrices, and solve linear programming problems. Linear Algebra Its Appl. 1991, 146, 79–91. [Google Scholar] [CrossRef]
- Bourmaud, G.; Mègret, R.; Arnaudon, M.; Giremus, A. Continuous-discrete extended Kalman filter on matrix Lie groups using concentrated Gaussian distributions. J. Math. Imaging Vis. 2015, 51, 209–228. [Google Scholar] [CrossRef]
- Hazewinkel, M. Laurent Series; Encyclopedia of Mathematics; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Balaz, I.; Brezovic, Z.; Minarik, M.; Kudjak, V.; Stofanik, V. Barkhausen criterion and another necessary condition for steady state oscillations existence. In Proceedings of the 2013 23rd International Conference Radioelektronika (RADIOELEKTRONIKA), Pardubice, Czech Republic, 16–17 April 2013; pp. 151–155. [Google Scholar] [CrossRef]
- Atiyah, M.; MacDonald, I. Introduction to Commutative Algebra; Westview Press: Boulder, CO, USA, 1969. [Google Scholar]
- Fiori, S. Extended Hamiltonian learning on Riemannian manifolds: Theoretical aspects. IEEE Trans. Neural Netw. 2011, 22, 687–700. [Google Scholar] [CrossRef]
- Fiori, S. Solving minimal-distance problems over the manifold of real symplectic matrices. SIAM J. Matrix Anal. Appl. 2011, 32, 938–968. [Google Scholar] [CrossRef]
- Fiori, S. Extended Hamiltonian learning on Riemannian manifolds: Numerical aspects. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 7–21. [Google Scholar] [CrossRef]
- Fiori, S.; Tanaka, T. An algorithm to compute averages on matrix Lie groups. IEEE Trans. Signal Process. 2009, 57, 4734–4743. [Google Scholar] [CrossRef]
- Tam, T.Y. Gradient flows and double bracket equations. Differ. Geom. Its Appl. 2004, 20, 209–224. [Google Scholar] [CrossRef]
- Serre, J.P. Lie Algebras and Lie Groups, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fiori, S. Discrete-Time Dynamical Systems on Structured State Spaces: State-Transition Laws in Finite-Dimensional Lie Algebras. Symmetry 2025, 17, 463. https://doi.org/10.3390/sym17030463
Fiori S. Discrete-Time Dynamical Systems on Structured State Spaces: State-Transition Laws in Finite-Dimensional Lie Algebras. Symmetry. 2025; 17(3):463. https://doi.org/10.3390/sym17030463
Chicago/Turabian StyleFiori, Simone. 2025. "Discrete-Time Dynamical Systems on Structured State Spaces: State-Transition Laws in Finite-Dimensional Lie Algebras" Symmetry 17, no. 3: 463. https://doi.org/10.3390/sym17030463
APA StyleFiori, S. (2025). Discrete-Time Dynamical Systems on Structured State Spaces: State-Transition Laws in Finite-Dimensional Lie Algebras. Symmetry, 17(3), 463. https://doi.org/10.3390/sym17030463