
Distributed Event-Triggered Control for Manipulator with Fixed-Time Disturbance Observer


Abstract
1. Introduction
- (1)
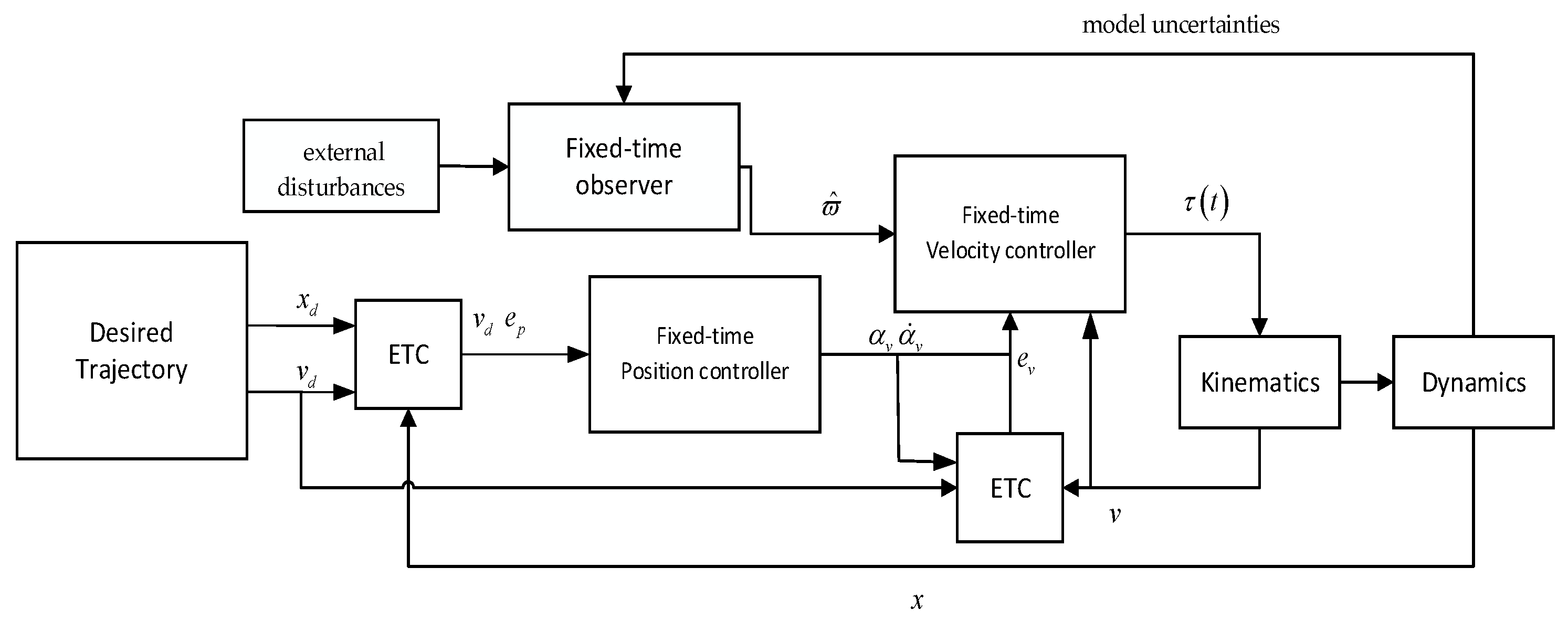
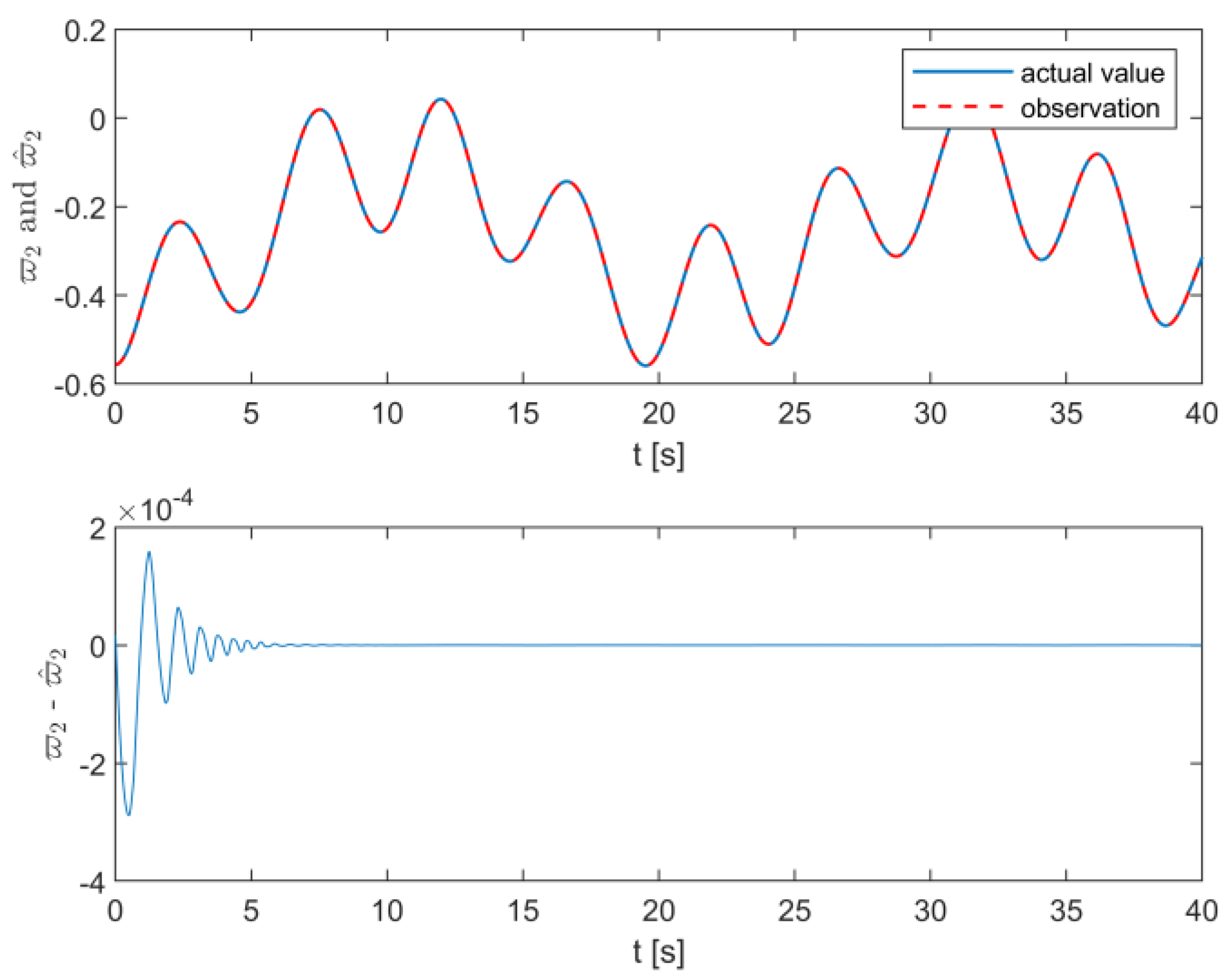
- To address the impact of total disturbance on the control system of a manipulator, this article designs a disturbance observer that can accurately reconstruct the lumped disturbance within a fixed time, independent of the system’s initial state. Additionally, unlike previous works in [10], restrictive assumptions such as the upper bound of the total disturbance being known or its time derivative converging are all relaxed.
- (2)
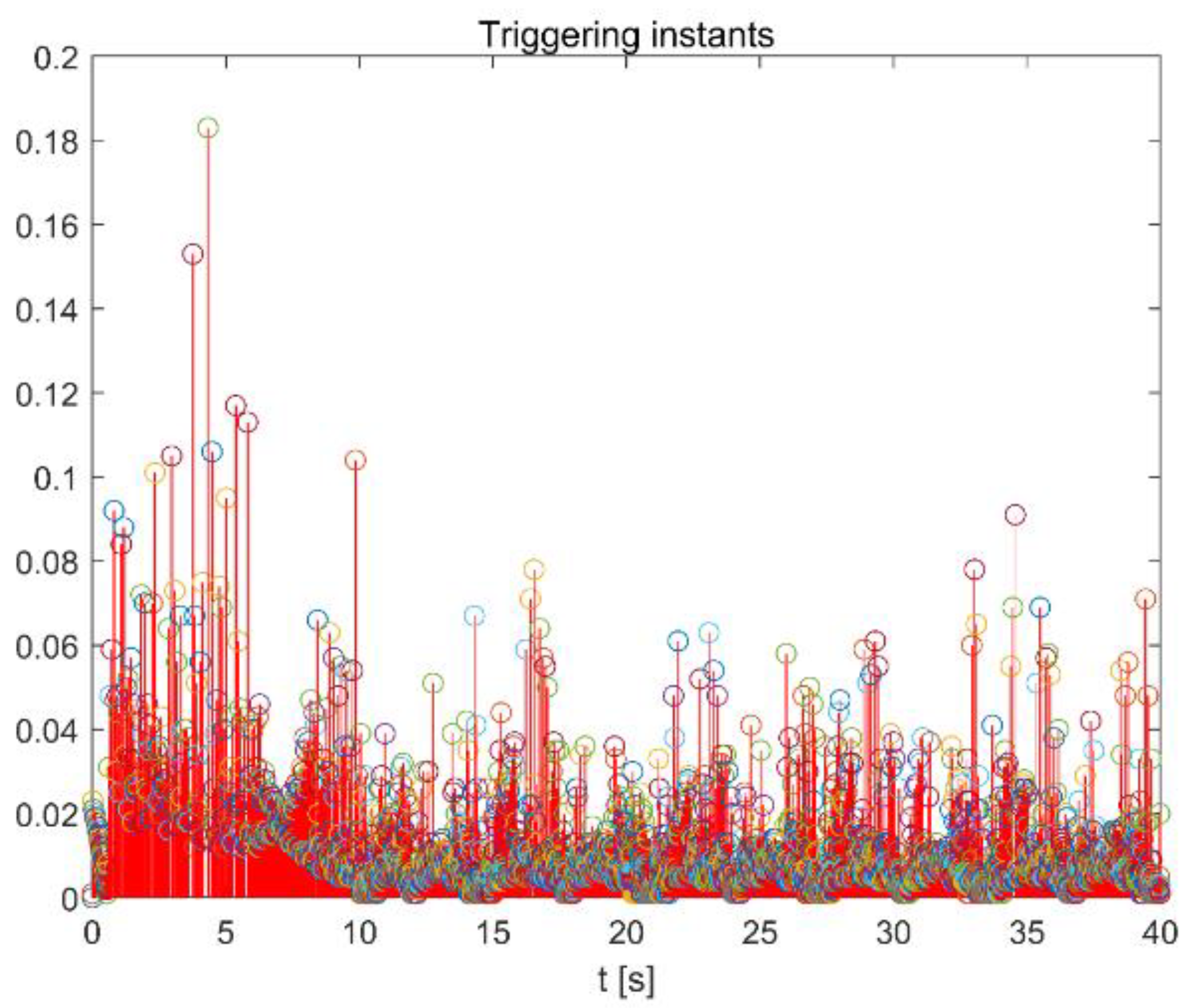
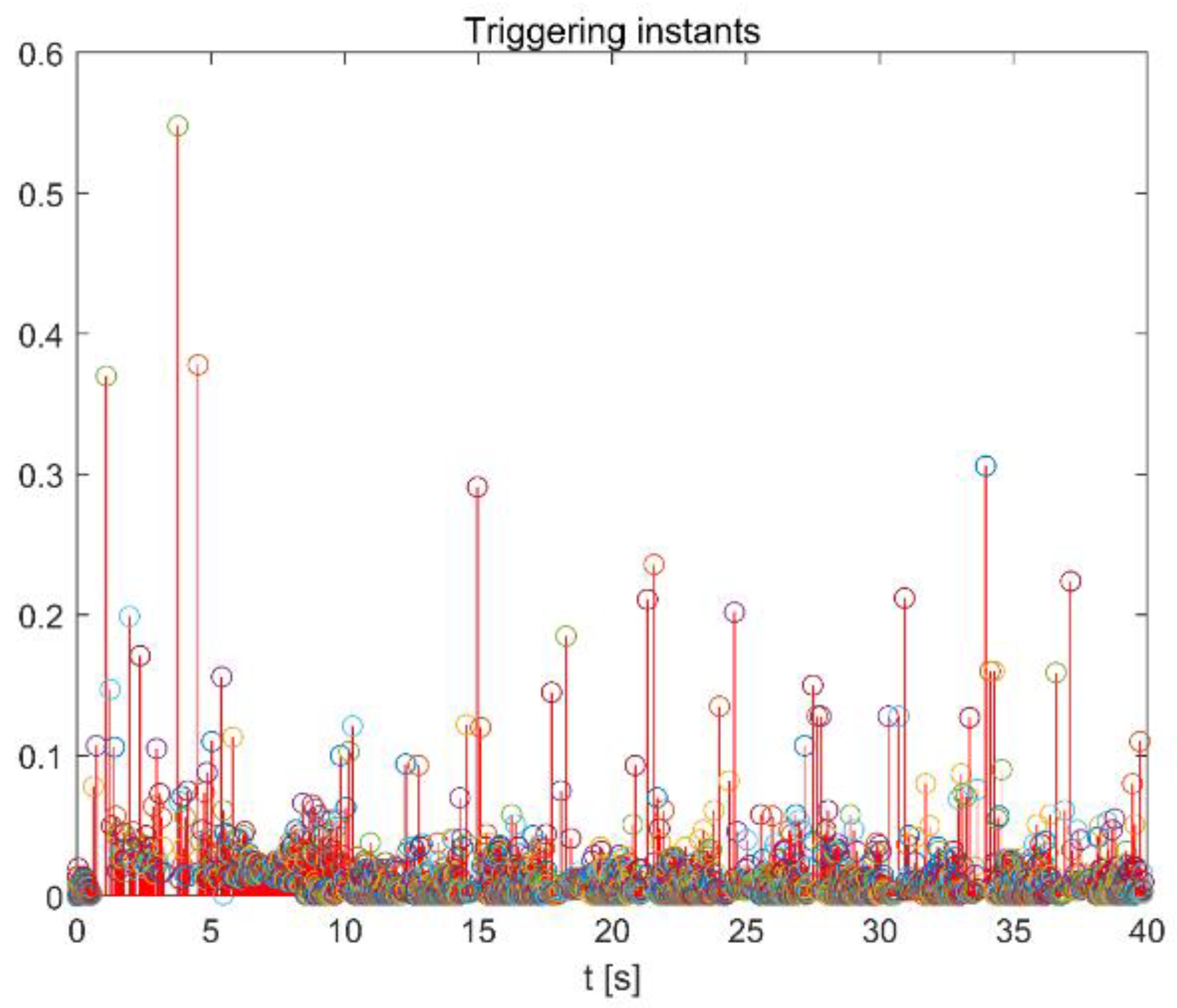
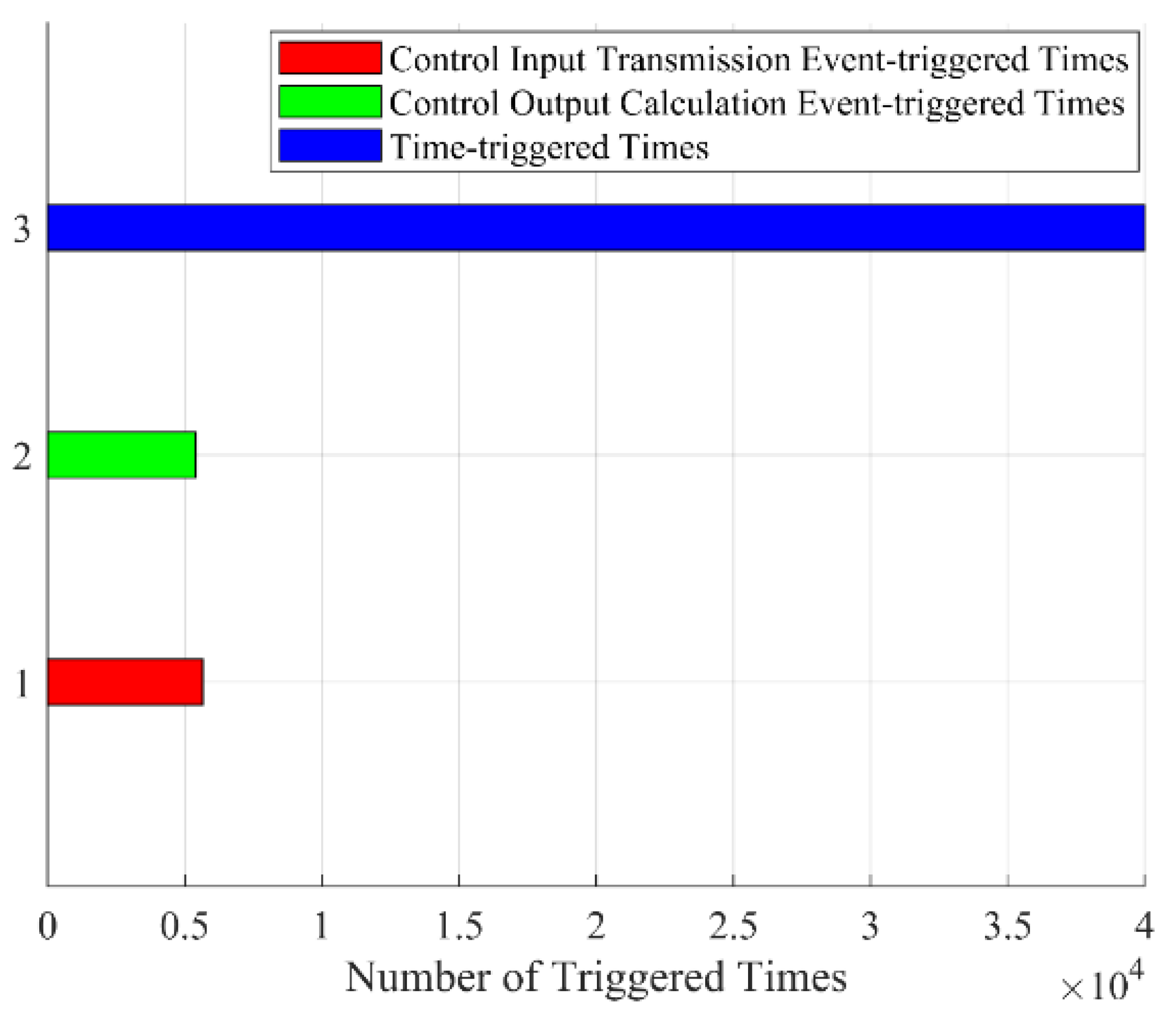
- The introduction of the event-triggering mechanism effectively conserves communication and computing resources. Specifically, within the framework of backstepping, a fixed-time controller for the manipulator based on the event-triggering mechanism is developed, which significantly reduces the transmission time of control inputs and the calculation time of control outputs.
- (3)
- By combining the event-triggering mechanism with fixed-time control theory, the controller can effectively leverage the benefits of ETC and FTC through the selection of an appropriate event-triggering parameter and control parameter which enables the manipulator to track the desired trajectory within a fixed time while conserving communication resources.
2. Preliminaries
2.1. Notations
2.2. Problem Formation
2.3. Lemmas
- (1)
- The origin of the closed-loop system (7) is fixed-time stable.
- (2)
- The upper bound of convergence time satisfieswhere is a positive constant, , , , , , .
- (1)
- .
- (2)
- for any satisfies the following inequality:Then, the system is fixed-time stable, where , , , and are positive constants, and , . The settling time is bounded by :
3. Controller Design
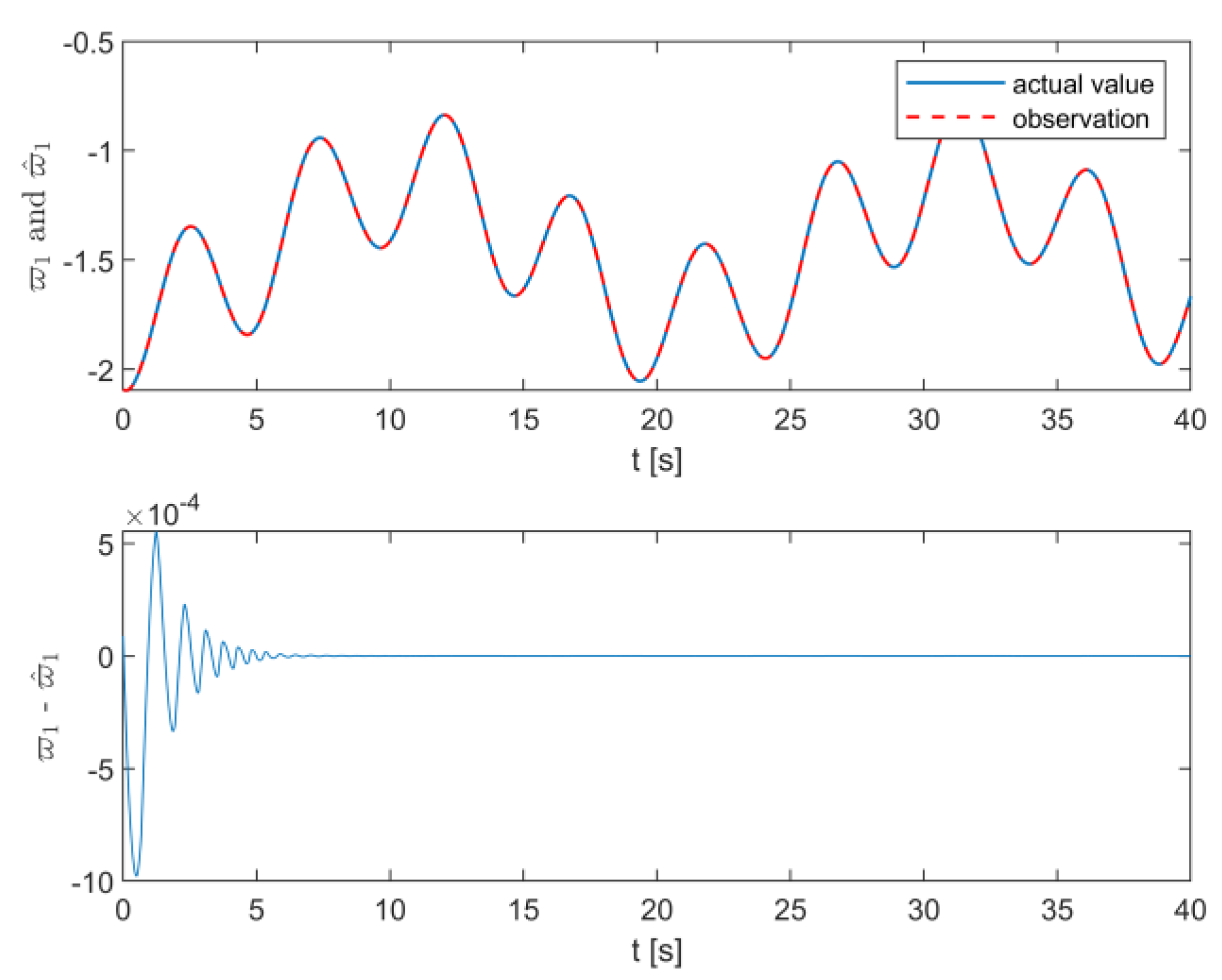
3.1. Observer Design
3.2. Controller Design
3.3. Zeno Behavior Exclusion
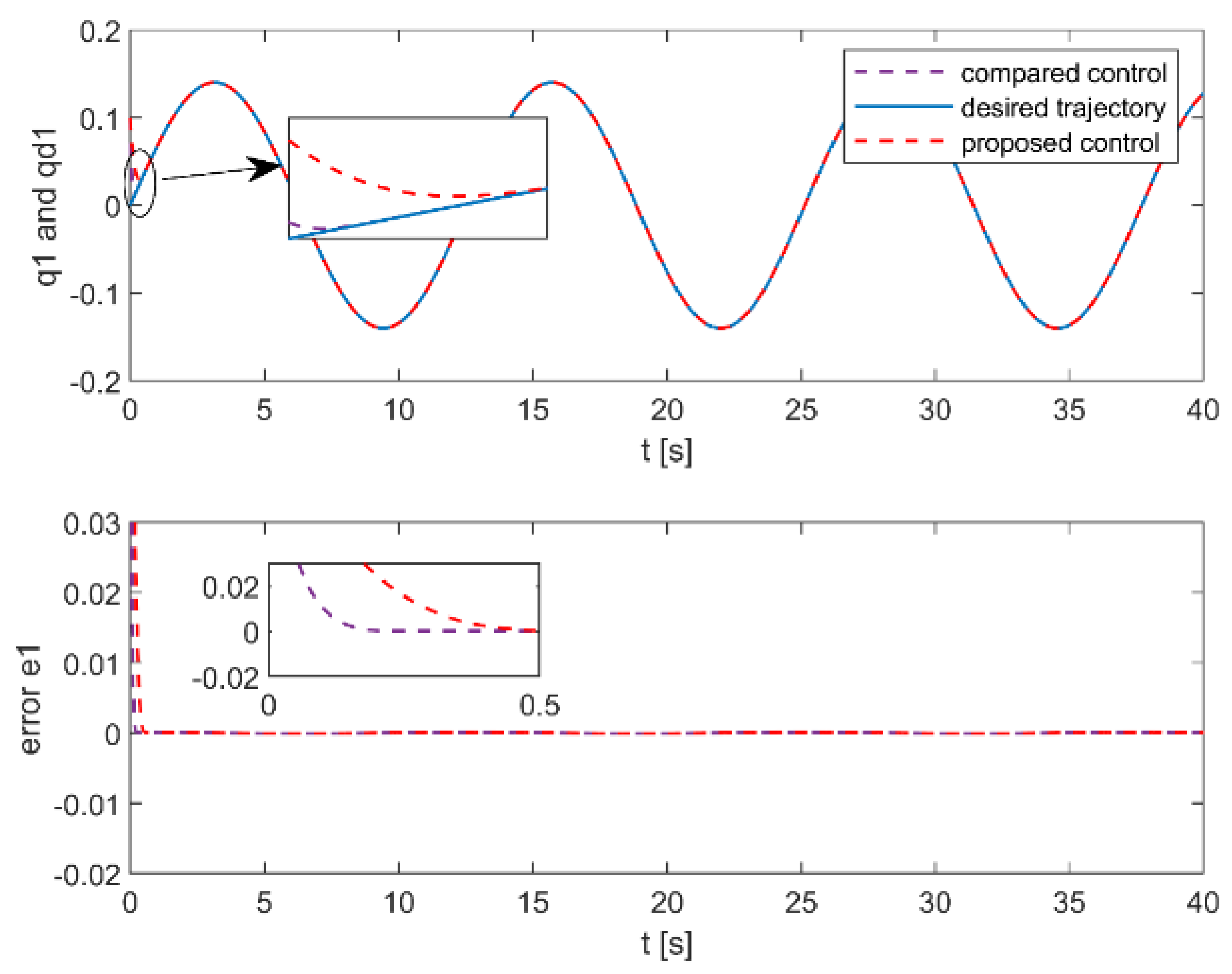
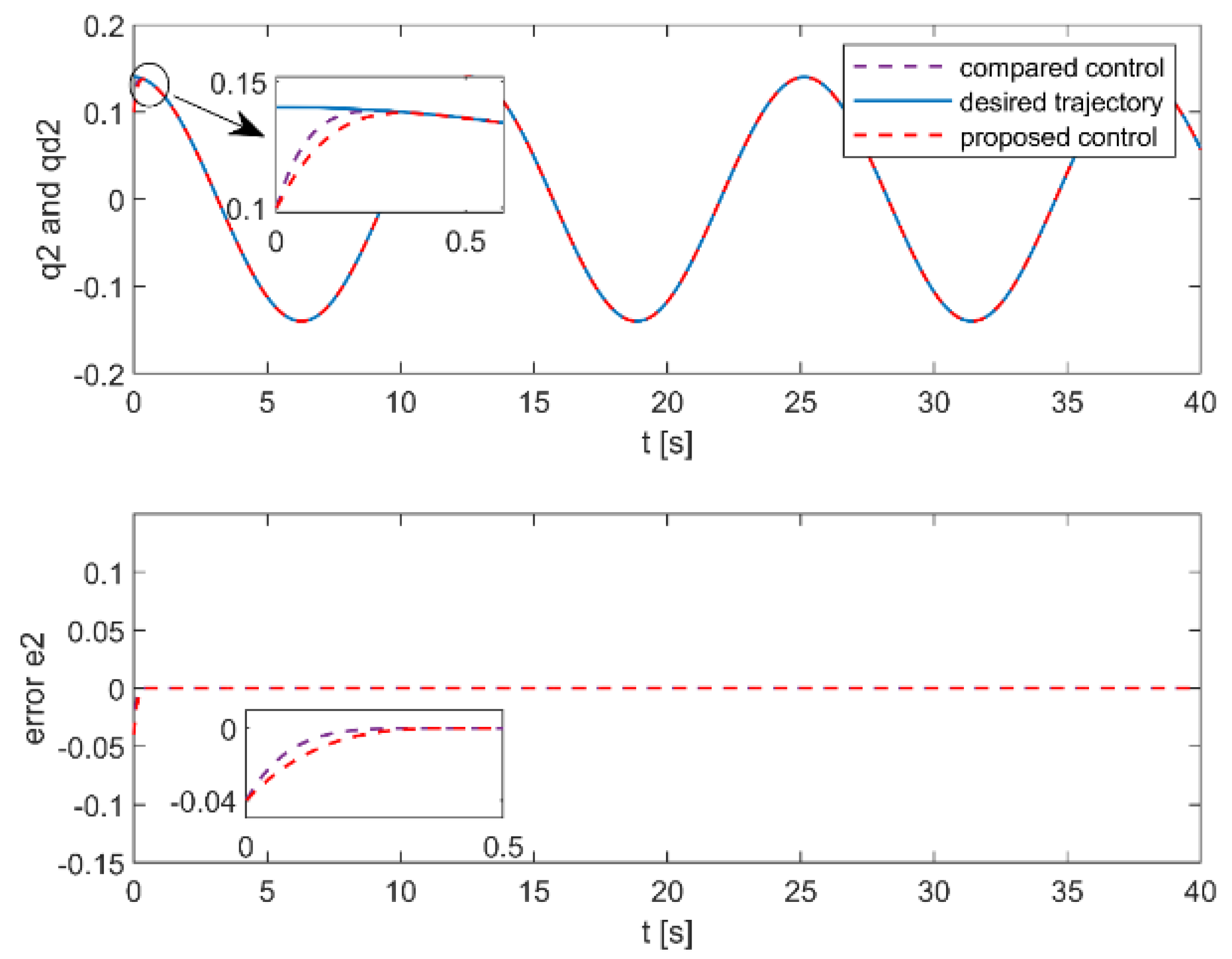
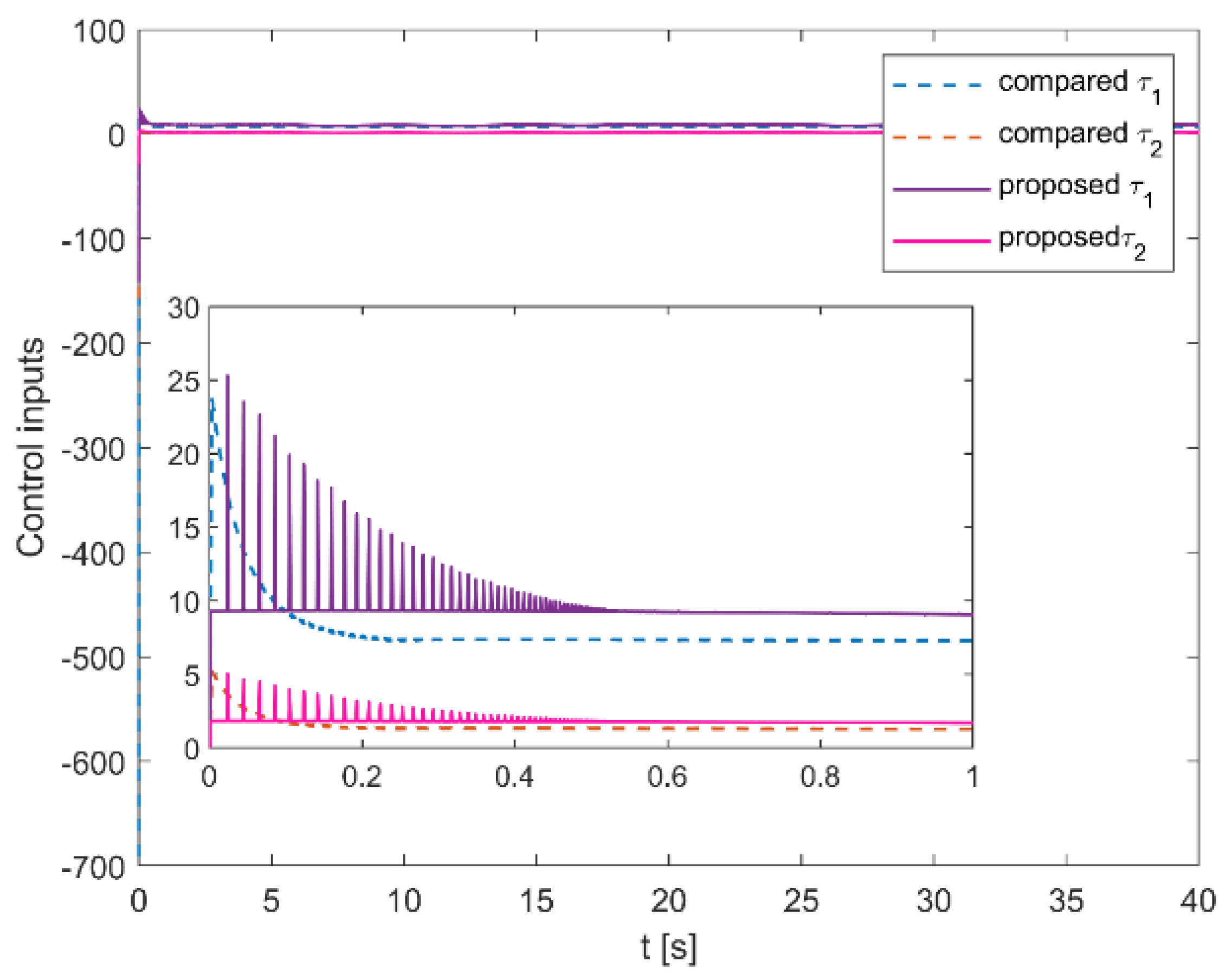
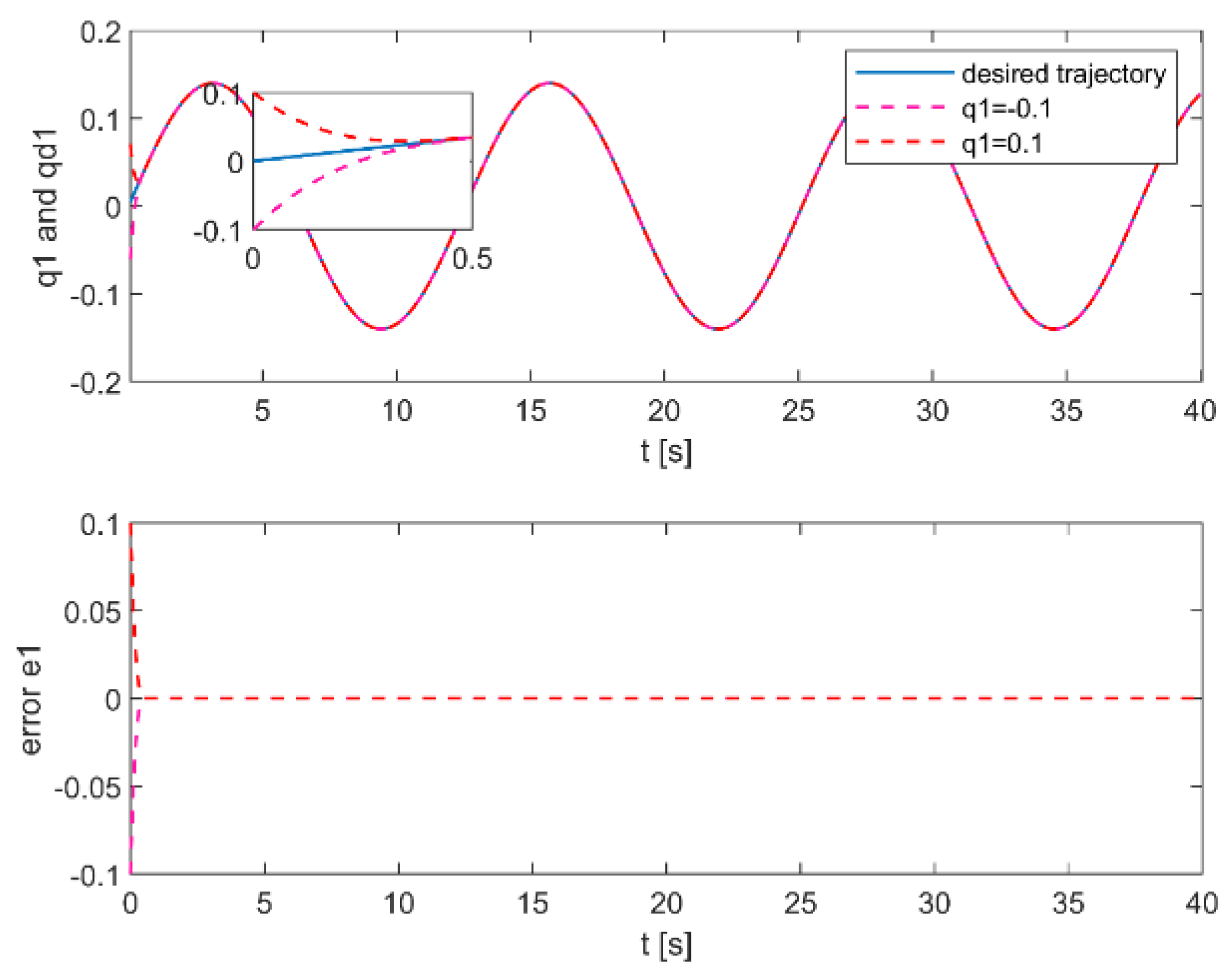
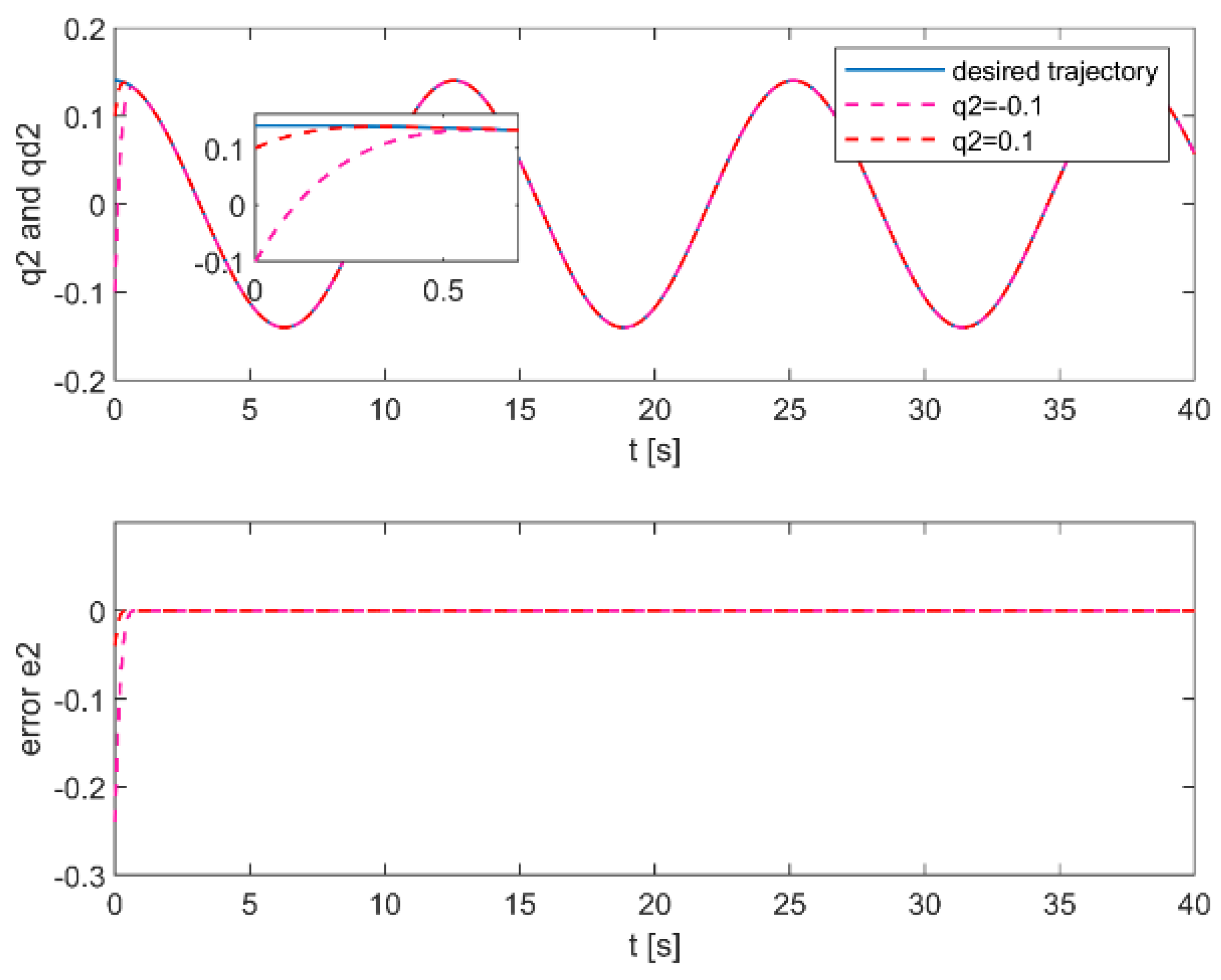
4. Simulation Research
5. Discussion
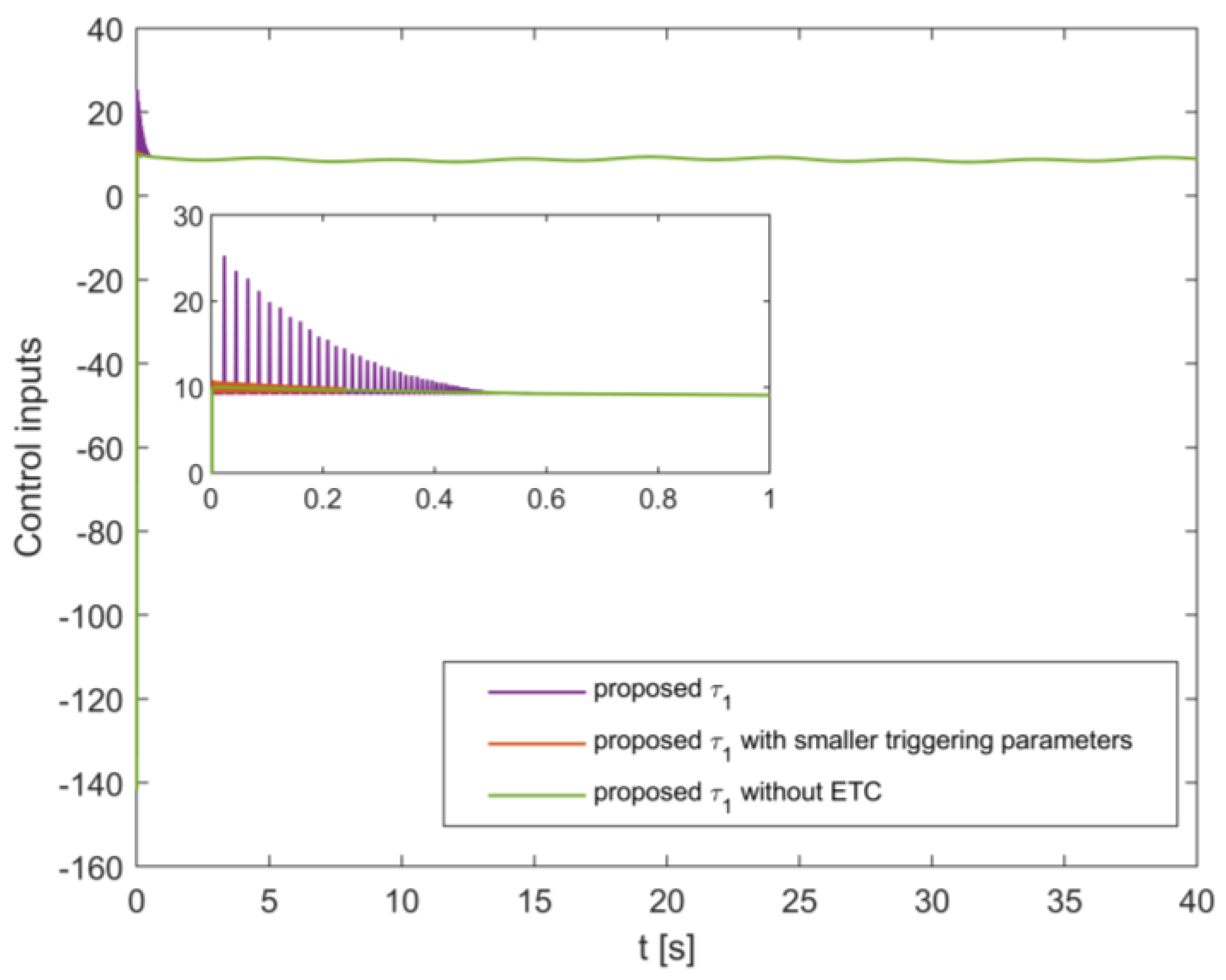
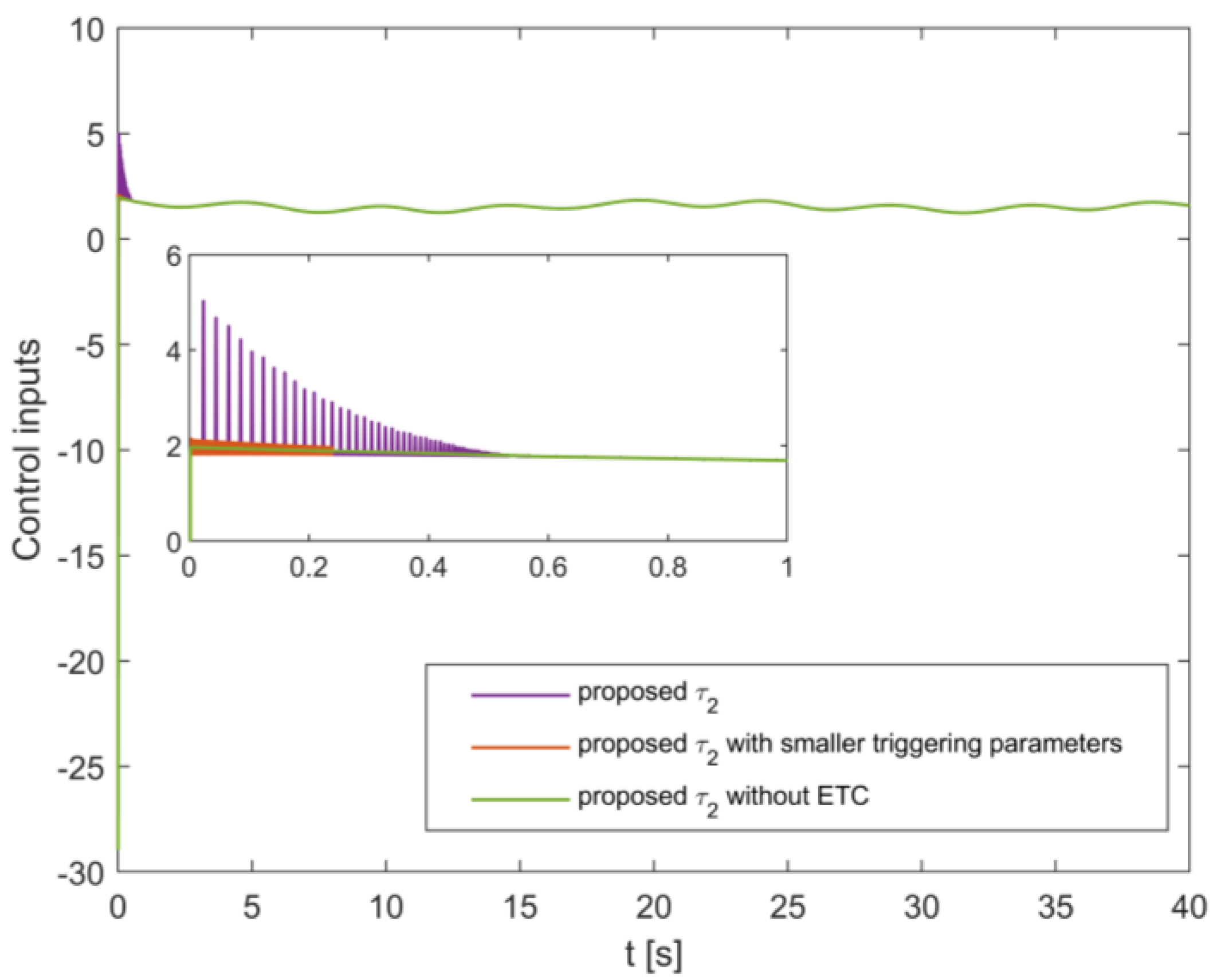
- (1)
- There is a positive connection between control input oscillation and event-triggering parameters.
- (2)
- The introduction of the ETC mechanism has caused more oscillations, and in practical applications, it is necessary to consider the balance between control input oscillations and reducing data transmission.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Han, L.; Xu, W.; Li, B.; Kang, P. Collision Detection and Coordinated Compliance Control for a Dual-Arm Robot without Force/Torque Sensing Based on Momentum Observer. IEEE/ASME Trans. Mechatron. 2019, 24, 2261–2272. [Google Scholar] [CrossRef]
- Rout, A.; Deepak, B.B.V.L.; Biswal, B.B.; Mahanta, G.B. Weld Seam Detection, Finding, and Setting of Process Parameters for Varying Weld Gap by the Utilization of Laser and Vision Sensor in Robotic Arc Welding. IEEE Trans. Ind. Electron. 2022, 69, 622–632. [Google Scholar] [CrossRef]
- Sun, W.; Wu, Y.; Lv, X. Adaptive Neural Network Control for Full-State Constrained Robotic Manipulator with Actuator Saturation and Time-Varying Delays. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 3331–3342. [Google Scholar] [CrossRef]
- Zhu, C.; Yang, C.; Jiang, Y.; Zhang, H. Fixed-Time Fuzzy Control of Uncertain Robots with Guaranteed Transient Performance. IEEE Trans. Fuzzy Syst. 2023, 31, 1041–1051. [Google Scholar] [CrossRef]
- Qiang, J.; Liu, L.; Xu, M.; Fang, Y. Fixed-time backstepping control based on adaptive super-twisting disturbance observers for a class of nonlinear systems. Int. J. Control 2021, 95, 2294–2306. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Finite Time Fault Tolerant Control for Robot Manipulators Using Time Delay Estimation and Continuous Nonsingular Fast Terminal Sliding Mode Control. IEEE Trans. Cybern. 2017, 47, 1681–1693. [Google Scholar] [CrossRef]
- Xie, Y.; Ma, Q.; Gu, J.; Zhou, G. Event-Triggered Fixed-Time Practical Tracking Control for Flexible-Joint Robot. IEEE Trans. Fuzzy Syst. 2023, 31, 67–76. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.Y.L.; Wang, Z.; Chen, T. Nonlinear Disturbance Observer-Based Control Design for a Robotic Exoskeleton Incorporating Fuzzy Approximation. IEEE Trans. Ind. Electron. 2015, 62, 5763–5775. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Chen, C.L.P. Disturbance Observer-Based Fuzzy Control of Uncertain MIMO Mechanical Systems with Input Nonlinearities and its Application to Robotic Exoskeleton. IEEE Trans. Cybern. 2017, 47, 984–994. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Pan, J.; Li, T.; Wang, Z.; Wang, D. Fixed-Time Control of a Robotic Arm Based on Disturbance Observer Compensation. Processes 2024, 12, 93. [Google Scholar] [CrossRef]
- Diao, S.Z.; Sun, W.; Su, S.F. Neural-based adaptive event-triggered tracking control for flexible-joint robots with random noises. Int. J. Robust Nonlinear Control 2022, 32, 2722–2740. [Google Scholar] [CrossRef]
- Li, C.; Zhao, L.; Xu, Z. Finite-Time Adaptive Event-Triggered Control for Robot Manipulators with Output Constraints. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3824–3828. [Google Scholar] [CrossRef]
- Ren, H.; Liu, R.; Cheng, Z.; Ma, H.; Li, H. Data-Driven Event-Triggered Control for Nonlinear Multi-Agent Systems with Uniform Quantization. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 712–716. [Google Scholar] [CrossRef]
- Priyanka, T.M.C.; Udhayakumar, K.; Mohanrasu, S.S.; Gowrisankar, A.; Rakkiyappan, R. Chaotic synchronization and fractal interpolation-based image encryption: Exploring event-triggered impulsive control in variable-order fractional lur’e systems. Multimed. Tools Appl. 2024, 2024, 1–40. [Google Scholar] [CrossRef]
- Shanmugasundaram, S.; Udhayakumar, K.; Gunasekaran, D.; Rakkiyappan, R. Event-triggered impulsive control design for synchronization of inertial neural networks with time delays. Neurocomputing, 2022; 483, 322, 332. [Google Scholar]
- Mohanrasu, S.S.; Udhayakumar, K.; Priyanka, T.M.C.; Gowrisankar, A.; Banerjee, S.; Rakkiyappan, R. Event-Triggered Impulsive Controller Design for Synchronization of Delayed Chaotic Neural Networks and Its Fractal Reconstruction: An Application to Image Encryption. Appl. Math. Model. 2023, 115, 490–512. [Google Scholar] [CrossRef]
- Cui, G.; Yang, W.; Yu, J.; Li, Z.; Tao, C. Fixed-Time Prescribed Performance Adaptive Trajectory Tracking Control for a QUAV. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 494–498. [Google Scholar] [CrossRef]
- Pan, Y.; Du, P.; Xue, H.; Lam, H.K. Singularity-Free Fixed-Time Fuzzy Control for Robotic Systems with User-Defined Performance. IEEE Trans. Fuzzy Syst. 2021, 29, 2388–2398. [Google Scholar] [CrossRef]
- Van, M.; Sun, Y.; Mcllvanna, S.; Nguyen, M.N.; Khyam, M.O.; Ceglarek, D. Adaptive Fuzzy Fault Tolerant Control for Robot Manipulators with Fixed-Time Convergence. IEEE Trans. Fuzzy Syst. 2023, 31, 3210–3219. [Google Scholar] [CrossRef]
- Liang, X.L.; Wang, H.B.; Zhang, Y.X. Adaptive nonsingular terminal sliding mode control for rehabilitation robots. Comput. Electr. Eng. 2022, 99, 107718. [Google Scholar] [CrossRef]
- He, W.; Ge, S.S.; Li, Y. Neural Network Control of a Rehabilitation Robot by State and Output Feedback. J. Intell. Robot. Syst. 2015, 80, 15–31. [Google Scholar] [CrossRef]
- Sui, W.; Duan, G.; Hou, M.; Zhang, M. Distributed fixed-time attitude coordinated tracking for multiple rigid spacecraft via a novel integral sliding mode approach. J. Frankl. Inst. 2020, 357, 9399–9422. [Google Scholar] [CrossRef]
- Tian, B.; Zuo, Z.; Yan, X.; Wang, H. A fixed-time output feedback control scheme for double integrator systems. Automatica 2017, 80, 17–24. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear Feedback Design for Fixed-Time Stabilization of Linear Control Systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Zou, A.; Ruiter, A.; Kumar, K. Distributed finite-time velocity-free attitude coordination control for spacecraft formations. Automatica 2016, 67, 46–53. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Golestani, M. Energy-Efficient Disturbance Observer-Based Attitude Tracking Control with Fixed-Time Convergence for Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 3659–3668. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
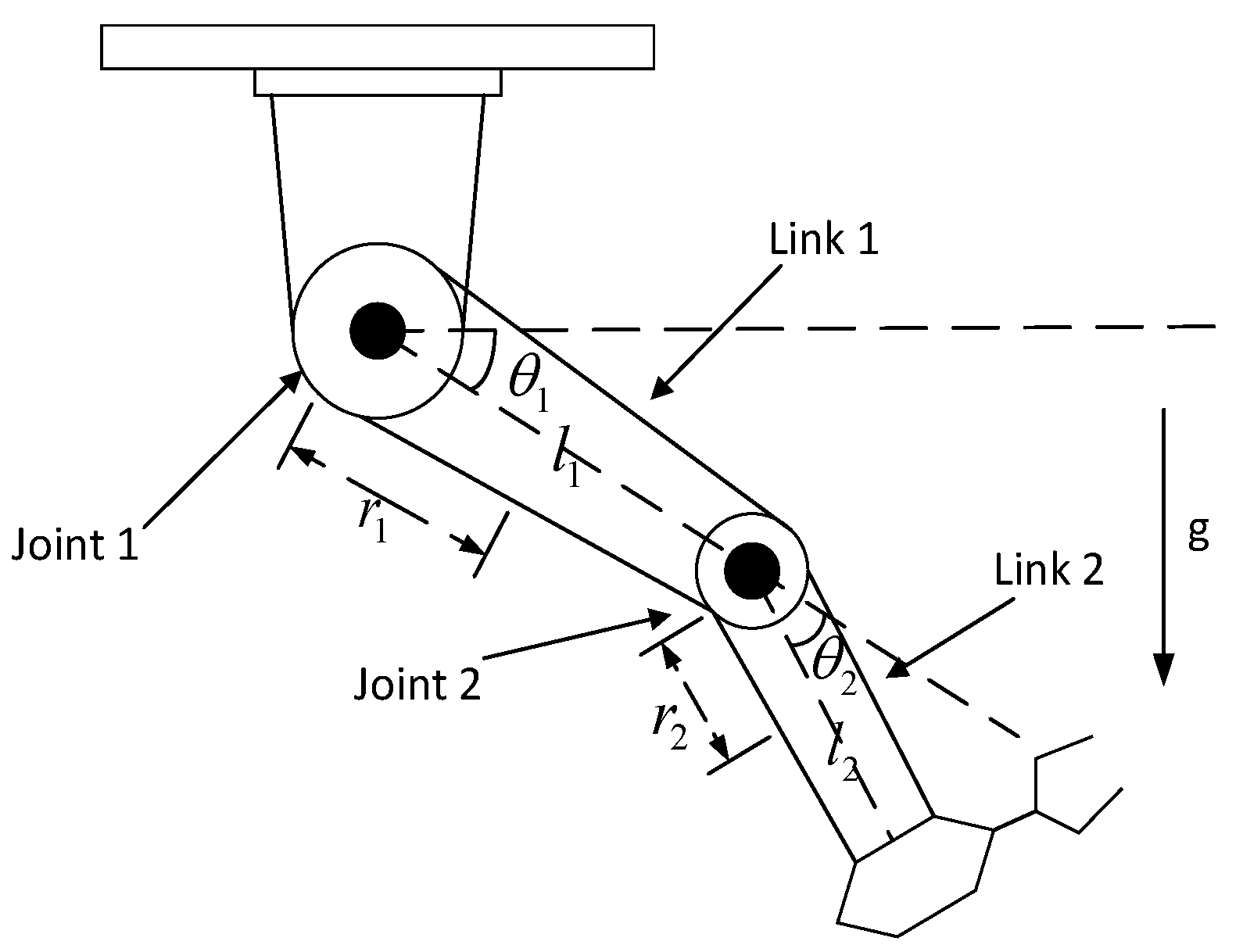
| Parameter | Description | Value |
|---|---|---|
| Mass of link 1 | ||
| Mass of link 2 | ||
| Length of link 1 | 0.35 m | |
| Length of link 2 | 0.31 m | |
| Moment of inertia of link 1 | ||
| Moment of inertia of link 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, J.; Zhang, G.; Wang, D.; Li, T. Distributed Event-Triggered Control for Manipulator with Fixed-Time Disturbance Observer. Symmetry 2024, 16, 426. https://doi.org/10.3390/sym16040426
Pan J, Zhang G, Wang D, Li T. Distributed Event-Triggered Control for Manipulator with Fixed-Time Disturbance Observer. Symmetry. 2024; 16(4):426. https://doi.org/10.3390/sym16040426
Chicago/Turabian StylePan, Jing, Gang Zhang, Duansong Wang, and Tianli Li. 2024. "Distributed Event-Triggered Control for Manipulator with Fixed-Time Disturbance Observer" Symmetry 16, no. 4: 426. https://doi.org/10.3390/sym16040426
APA StylePan, J., Zhang, G., Wang, D., & Li, T. (2024). Distributed Event-Triggered Control for Manipulator with Fixed-Time Disturbance Observer. Symmetry, 16(4), 426. https://doi.org/10.3390/sym16040426