
Chaotification of 1D Maps by Multiple Remainder Operator Additions—Application to B-Spline Curve Encryption

 ,
,  , , ,
, , ,  and
and 
Abstract
1. Introduction
1.1. Applications of Chaos and Chaotification
1.2. Encryption
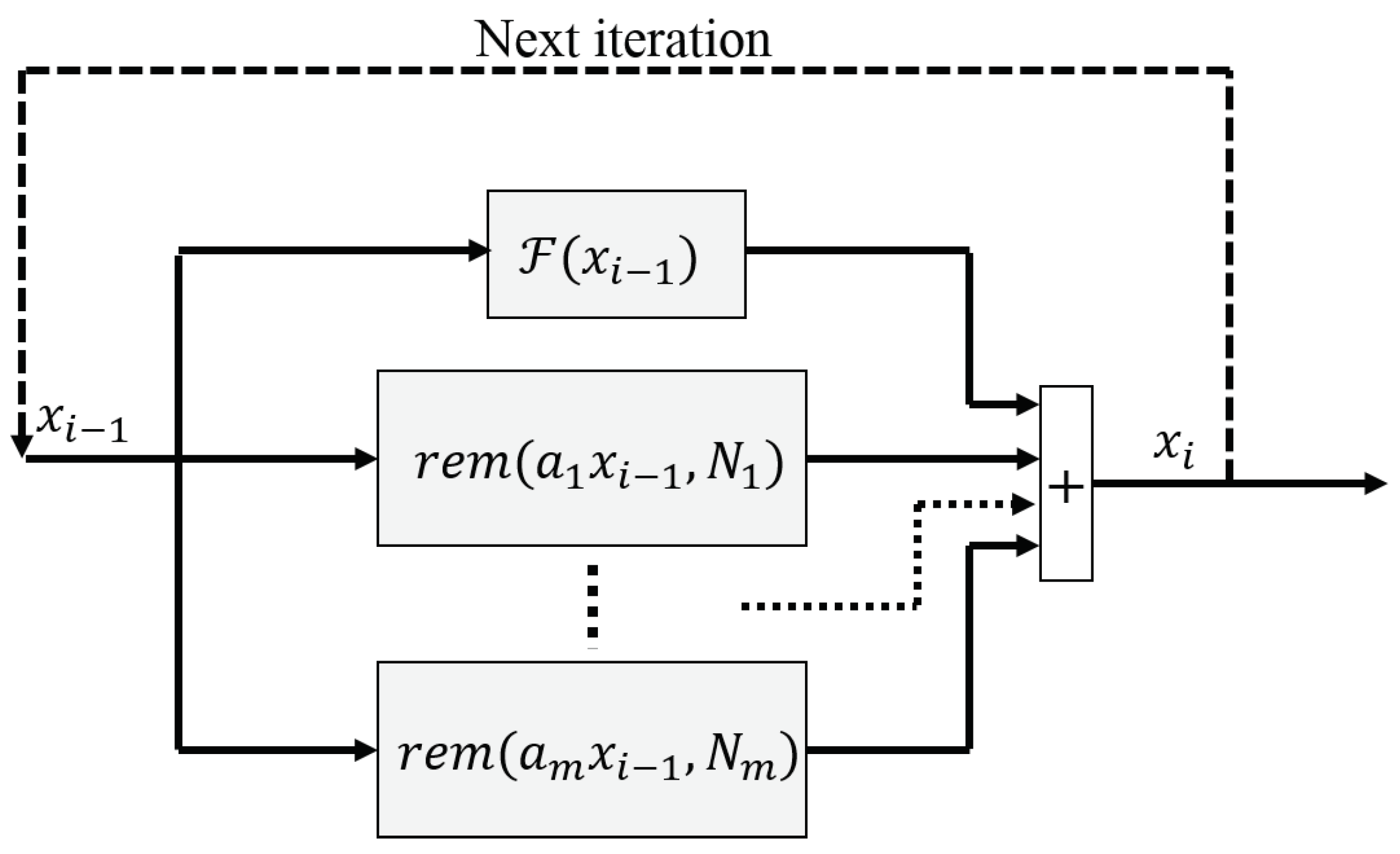
2. The Proposed Chaotification Technique
- 1.
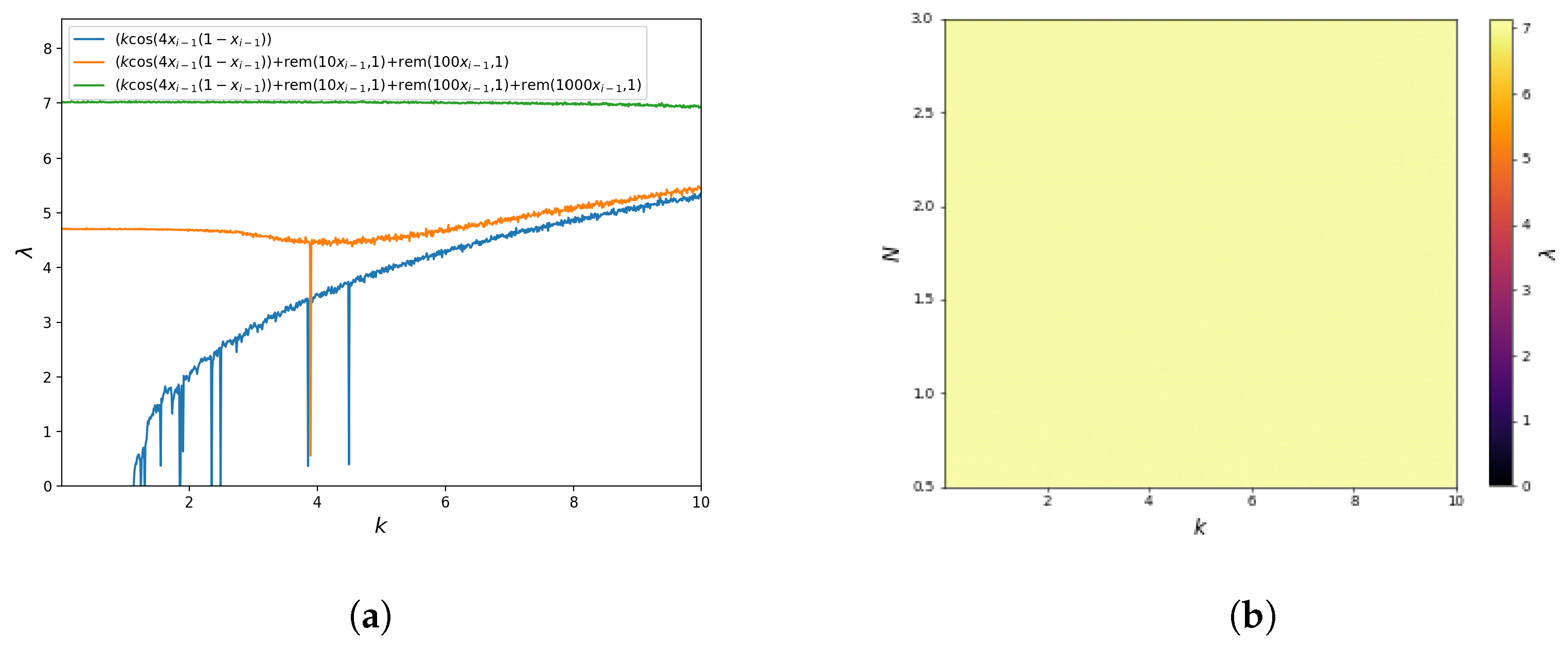
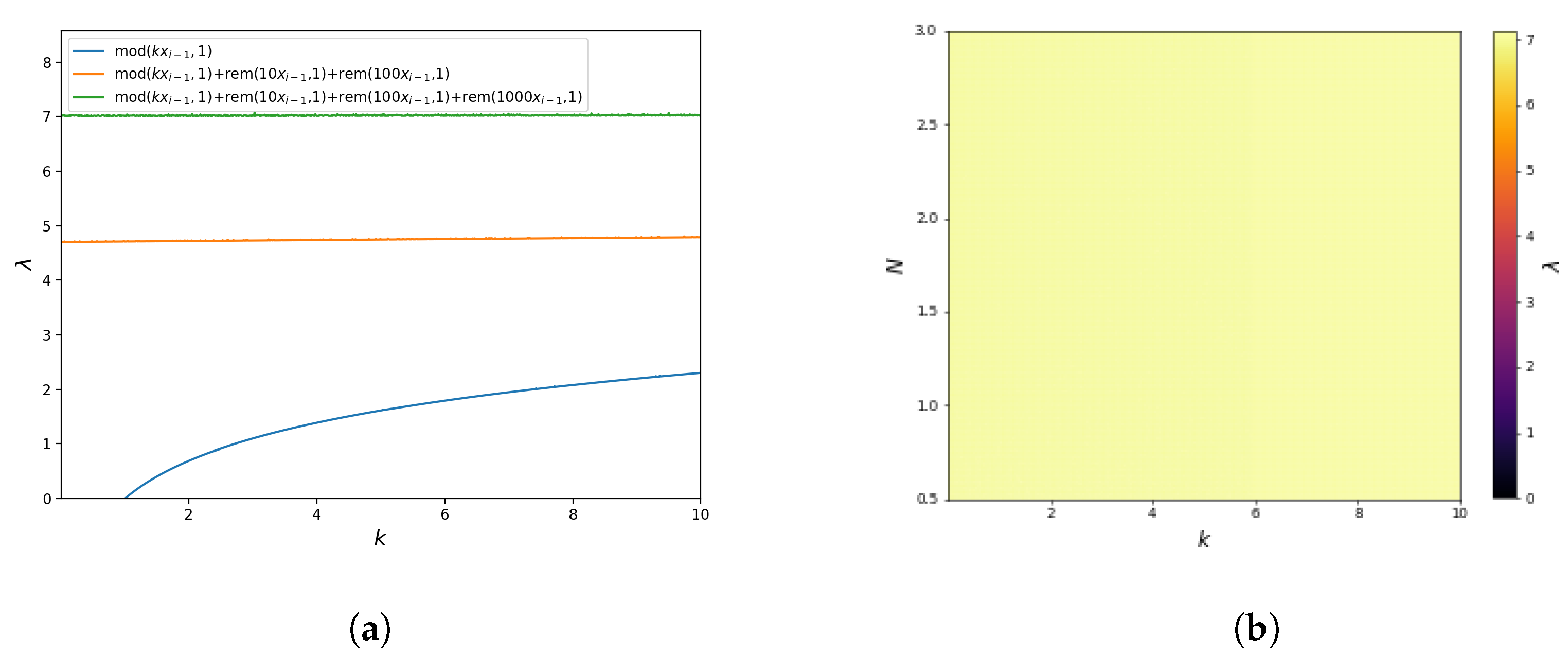
- The map has a higher Lyapunov exponent ifwhere is the domain of .
- 2.
3. Chaotification Examples for Different Chaotic Maps
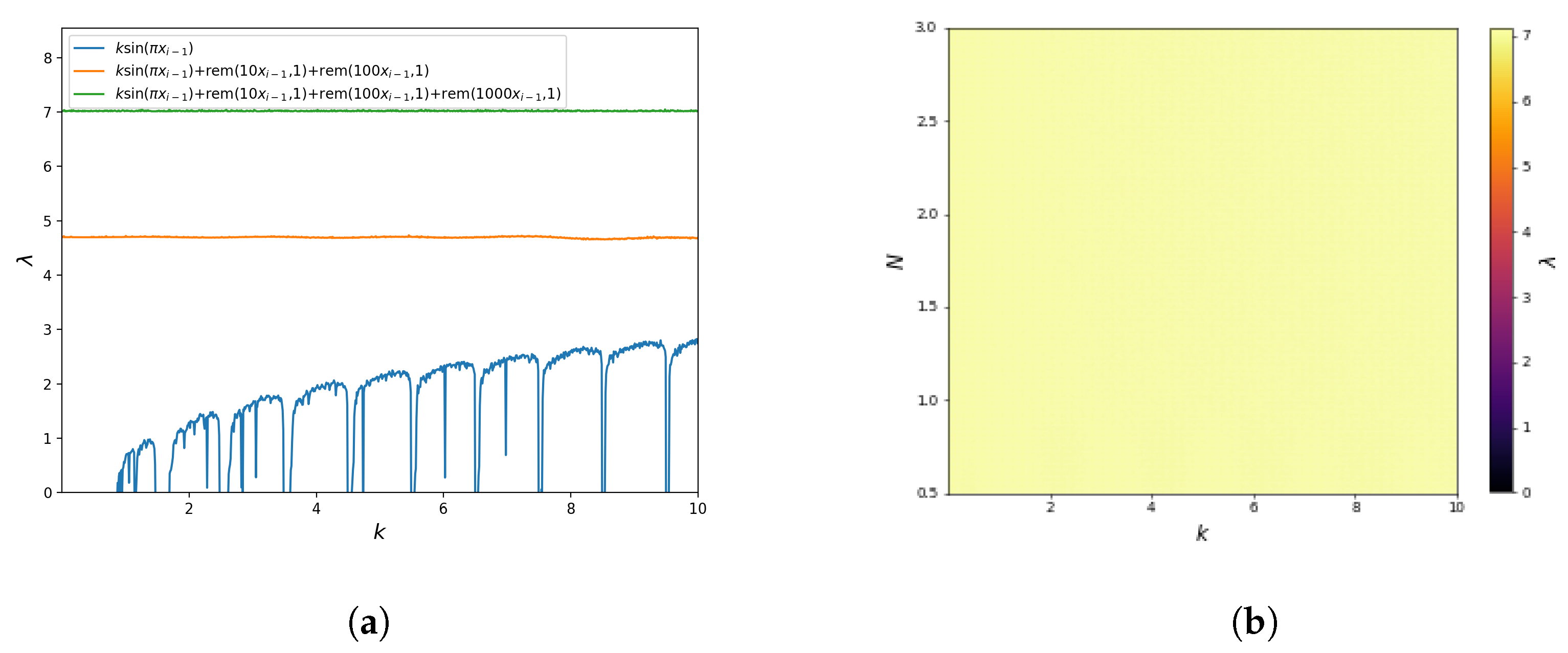
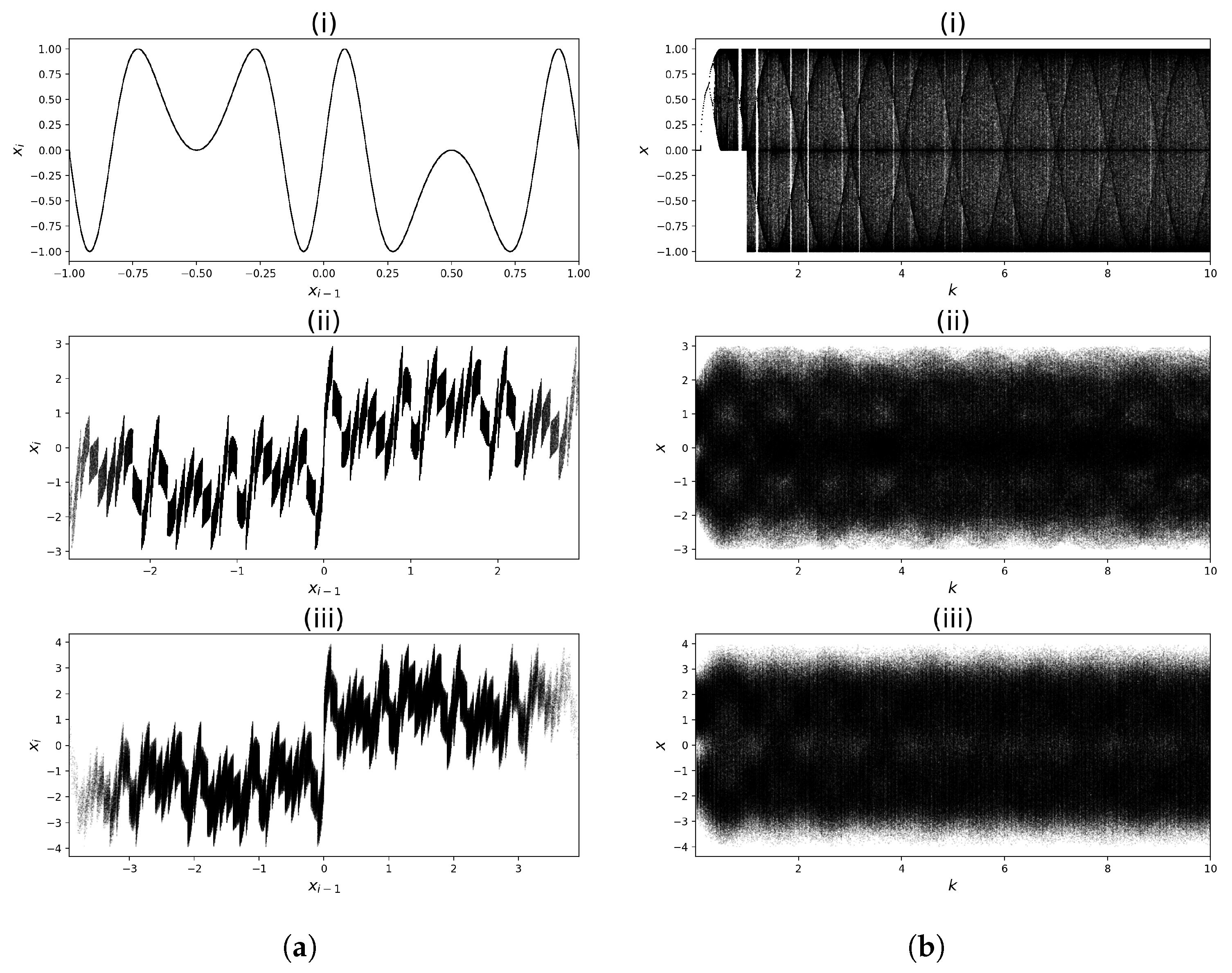
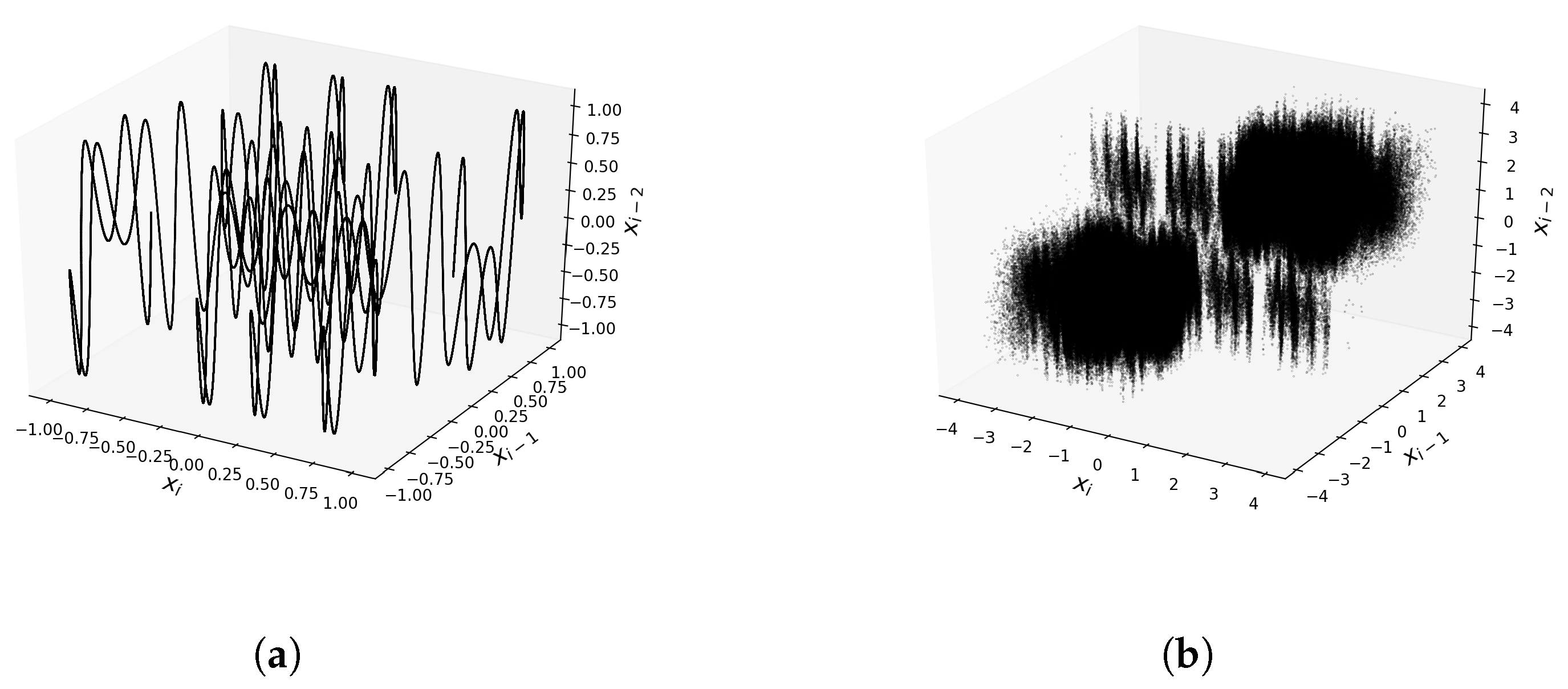
3.1. Sine Map
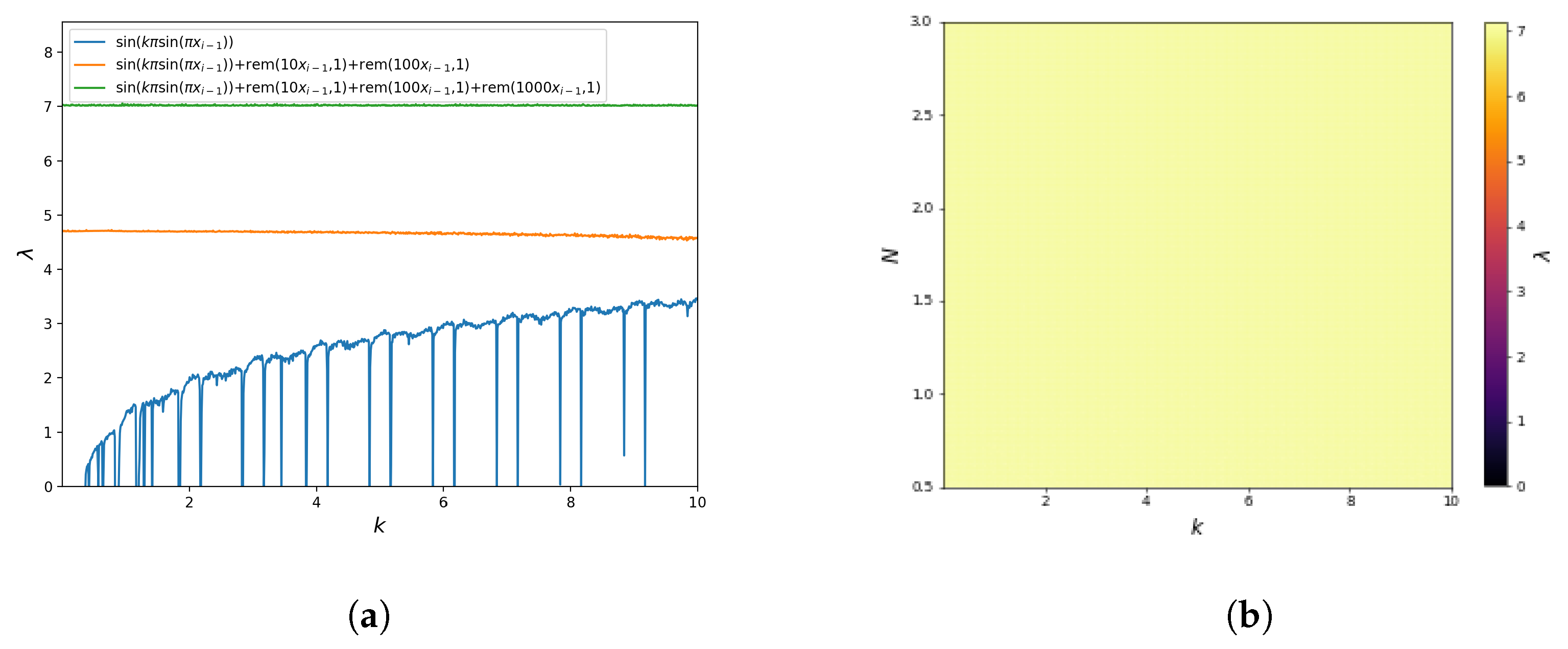
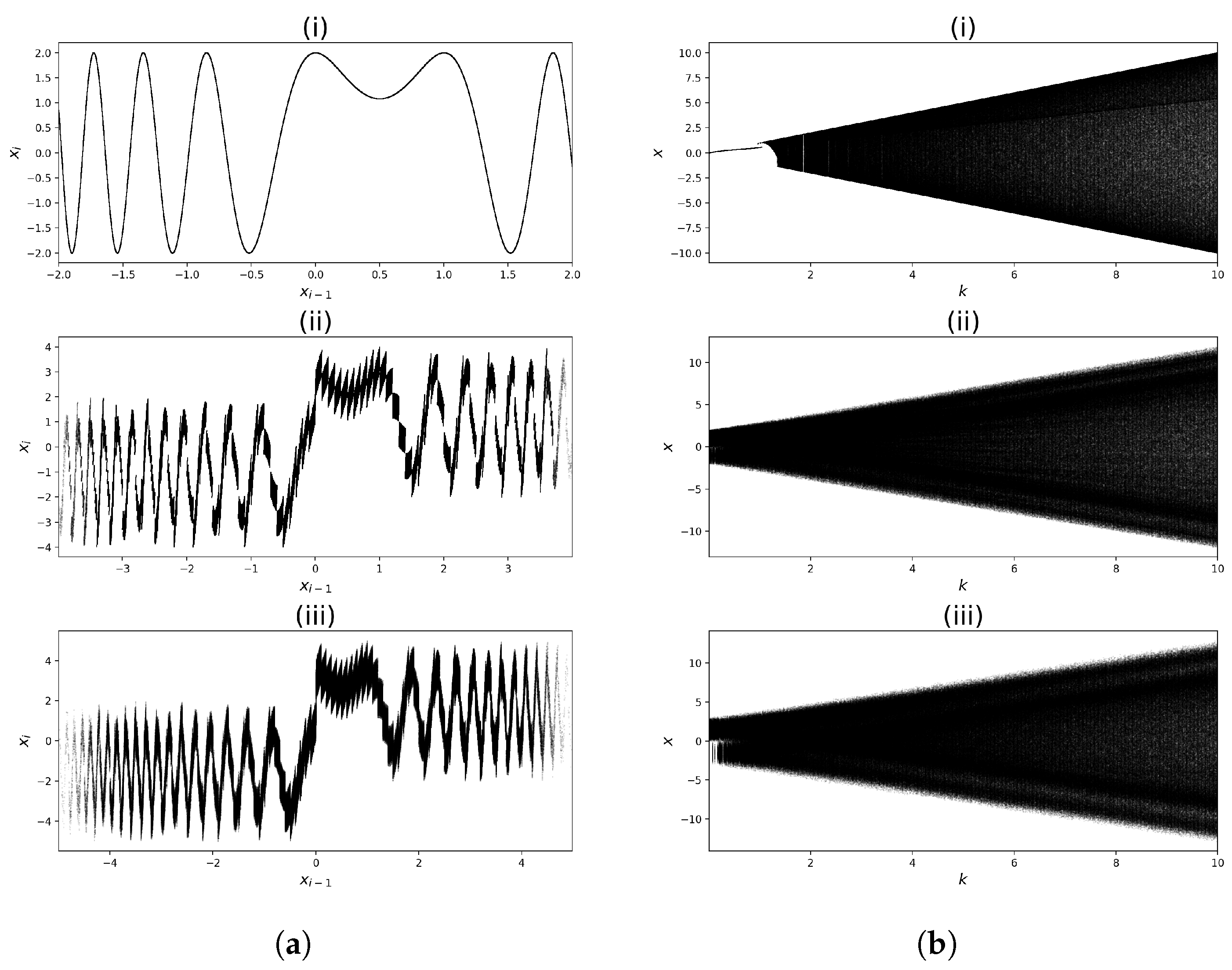
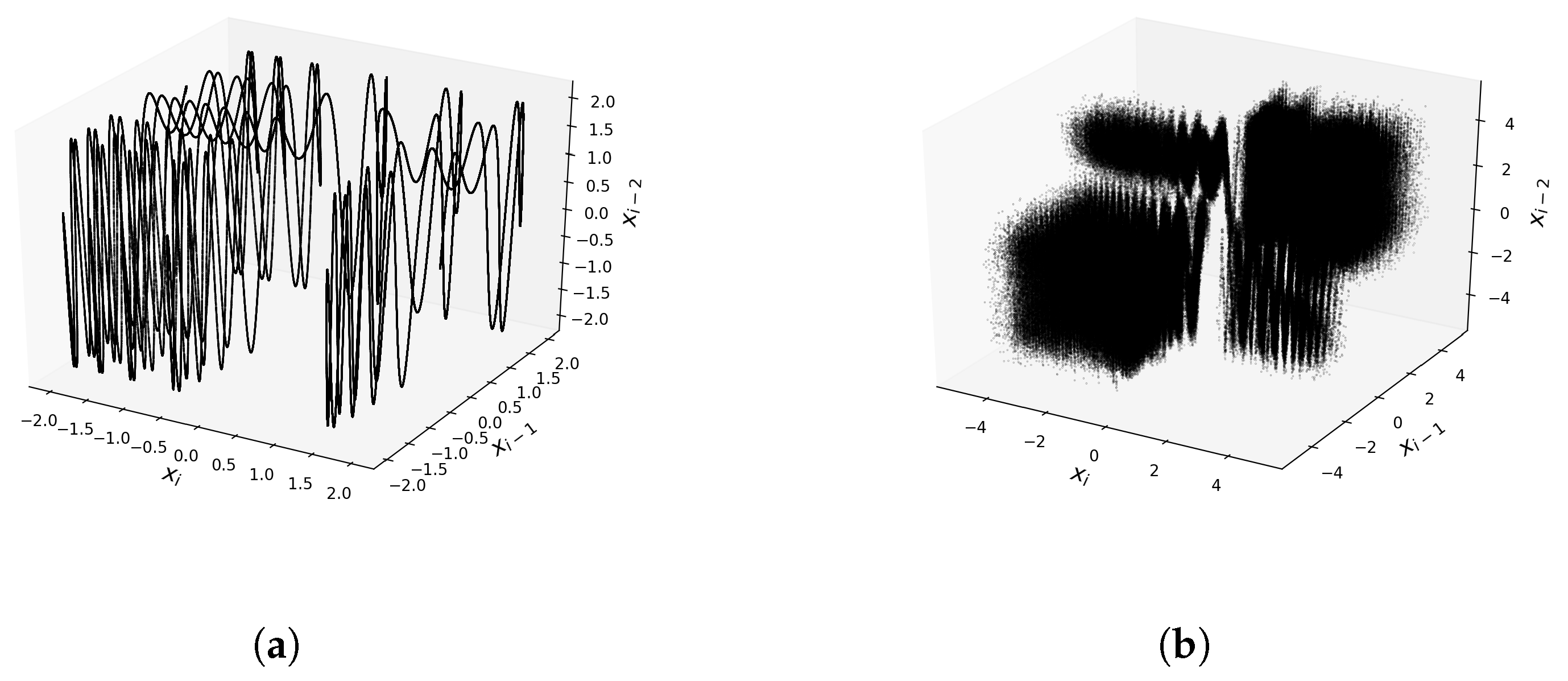
3.2. Sine-Sine Map
3.3. Cosine–Logistic Map
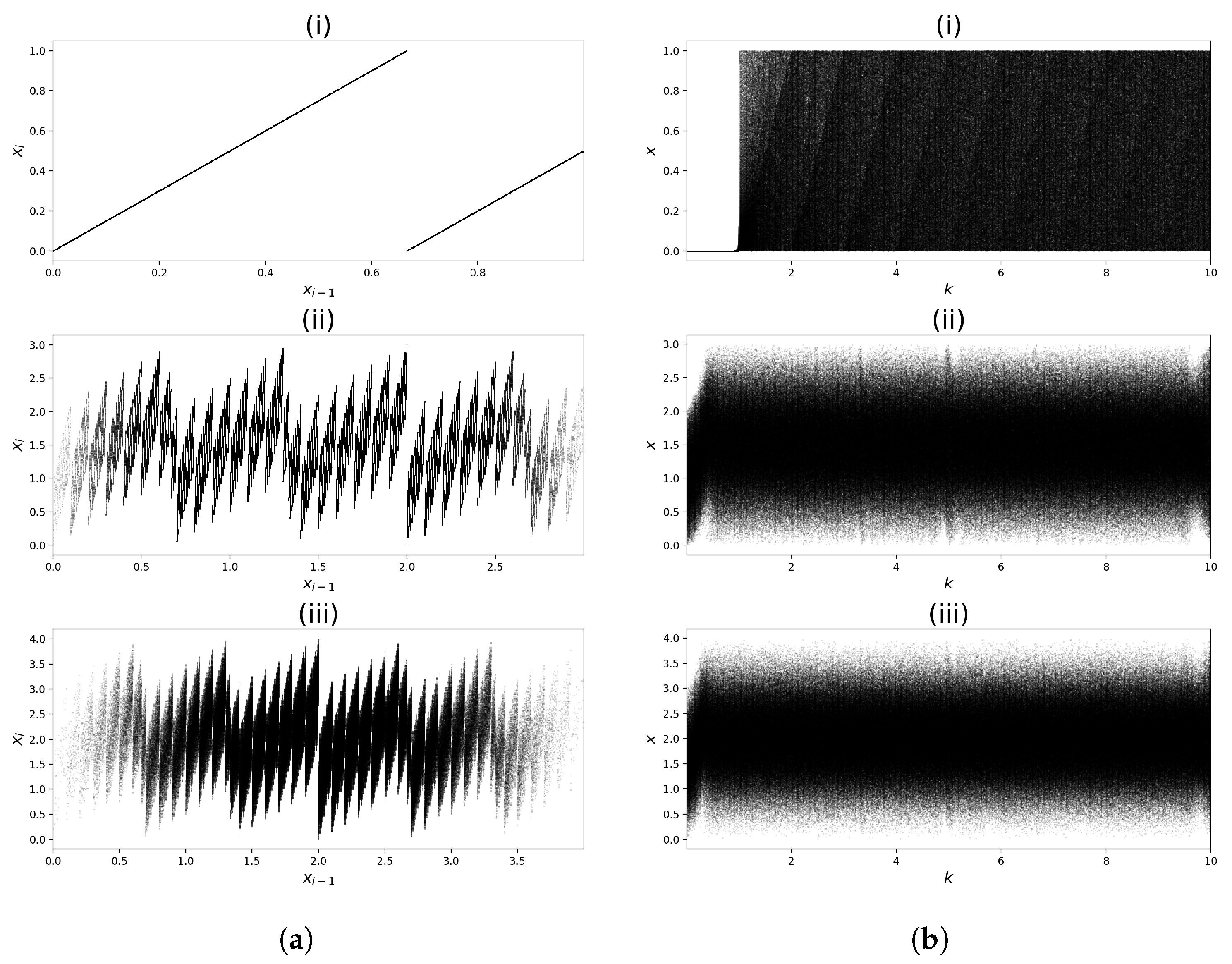
3.4. Renyi Map
4. Effect on Key Space
5. Operations per Iteration
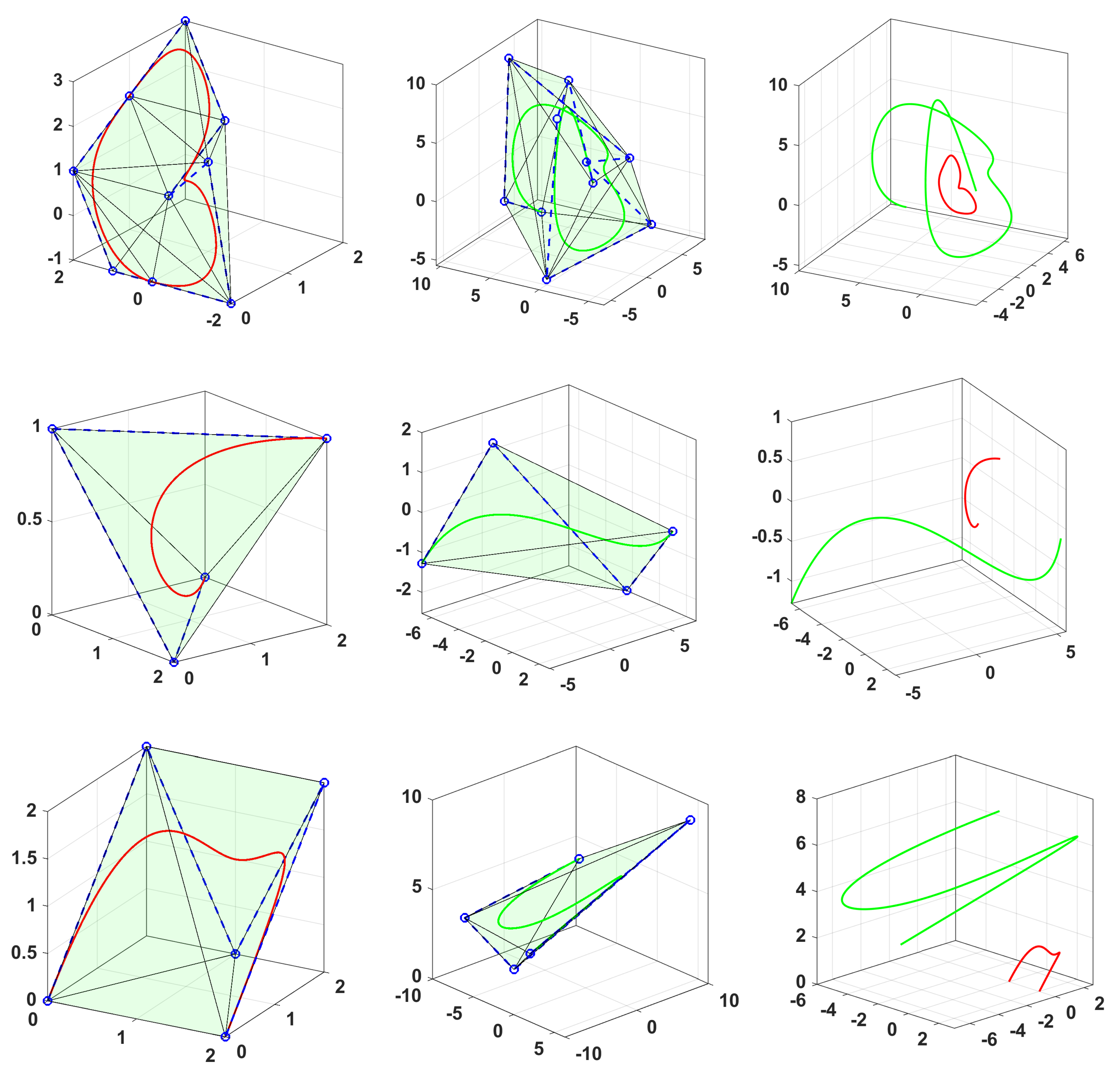
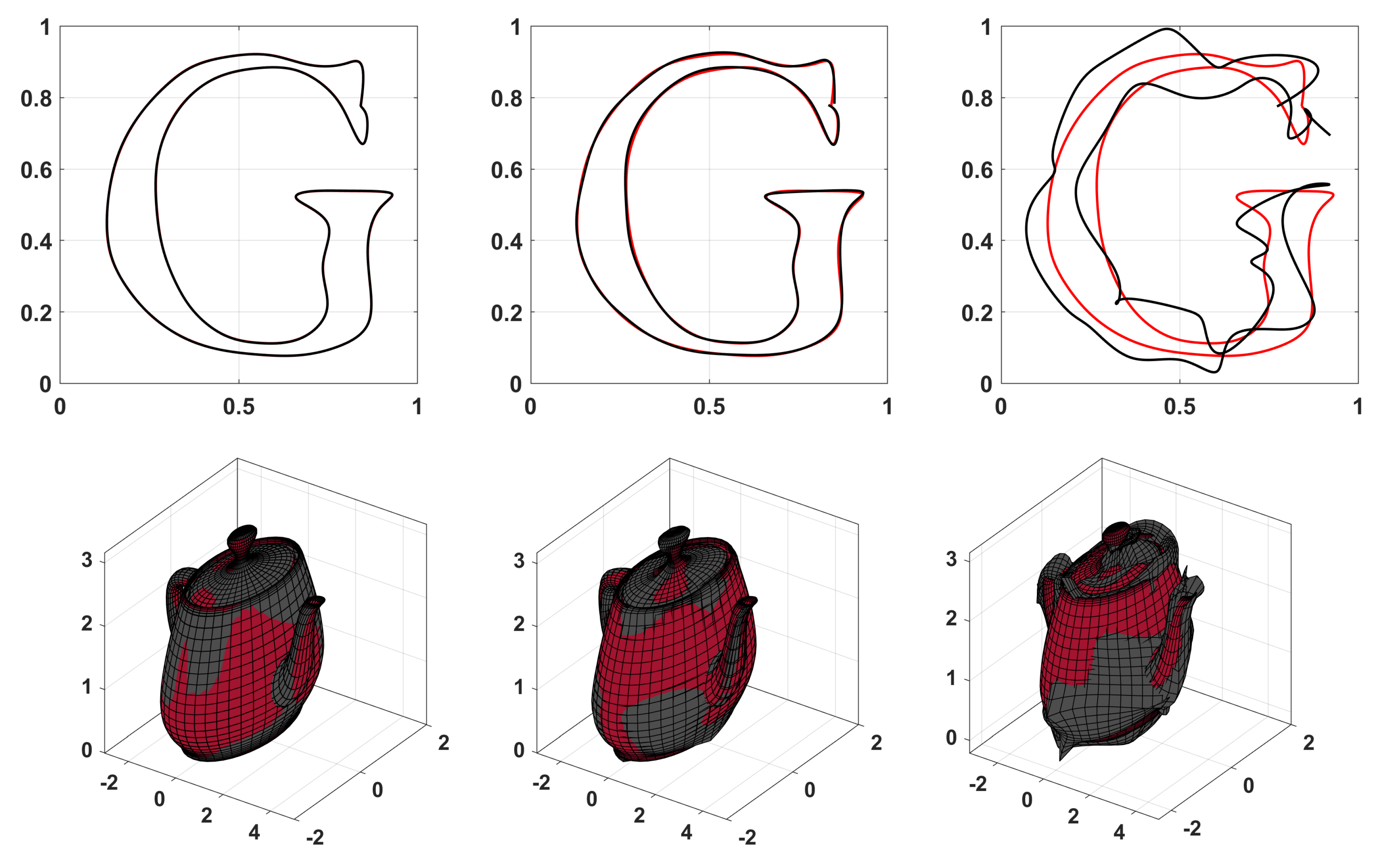
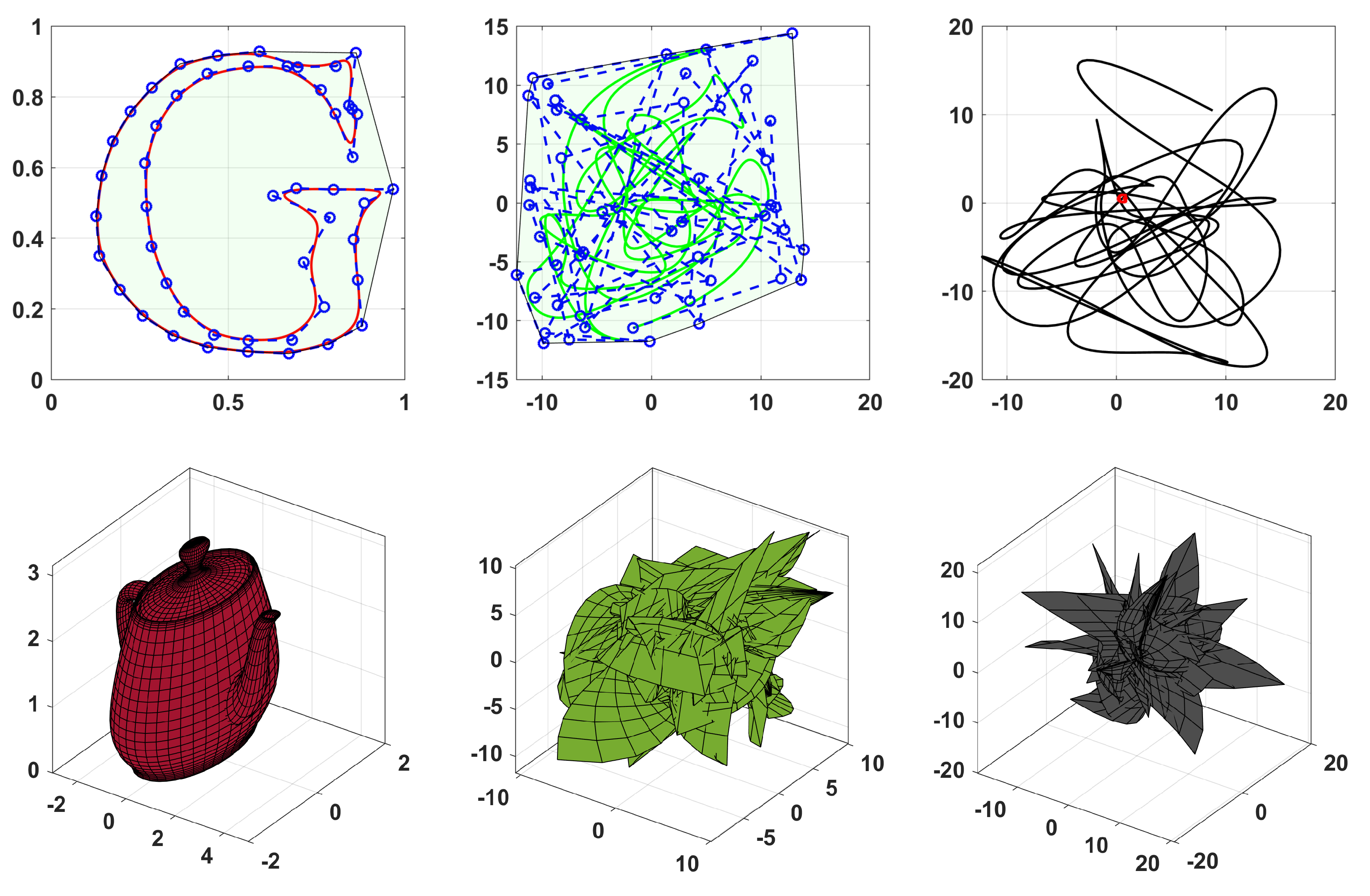
6. Application to Symmetric Encryption of B-Spline Curves
6.1. B-Spline Basics
6.2. Encryption of a B-Spline Curve
- Input.
- A plaintext B-spline curve described by its control points arranged in a matrix , the polynomial degree n, and a knot sequence U. It is assumed that all the control point coordinates lie in the interval .A chaotic map of the form (19), with key parameters , to be computed below.
- Data setup.
- First, the entries of are concatenated in a single vector of size as follows:where represents the j-th coordinate of the control point.
- Key setup.
- To make the design resistant to plaintext attacks, the map keys should be plaintext-dependent. This achieves the confusion task in encryption. They are initialised aswhere denotes the Euclidean norm.
- Step 1.
- The first step is to shuffle the sequence of the control points. This is also part of the usual confusion step in encryption, which disperses the plaintext information. For the shuffling operation, the following pseudo-random number generator (PRNG) is utilised:which generates integers in the interval , until discrete values are generated. If an integer is generated twice, it is discarded the second time. The result is a list of non-repeating integers, denoted as . These integers represent the new order of the elements of the vector . Therefore, the element of is moved to the first position, the element of is moved to the second position, and so on. The resulting matrix, which contains the re-arranged elements of , is denoted as :
- Step 2.
- The next step is the diffusion of the shuffled plaintext. The values of the vector are masked using the values of the chaotic map used in Step 1. Continuing the iteration of the map from Step 2 (without making use of the PRNG), the elements of are masked as follows:where the i index in is used to denote that the map is being iterated, continuing from the previous Step 1. The resulting values are arranged in a vector:
- Step 3.
- After the substitution step is finished, the elements of are reshaped into an matrix , where each column represents a ciphertext control point, similar to the matrix .
- Output.
- A ciphertext B-spline curve described by its control points , the polynomial degree n, and a knot sequence U.
6.3. Decryption Process
- Input.
- A ciphertext B-spline curve described by its control points , the polynomial degree n, and a knot sequence U.A chaotic map of the form (19), with key parameters .
- Step 1.
- The first step is to arrange the elements of the ciphertext control points in a vector, as Equation (46).
- Step 2.
- The PRNG (41) is initialised. The PRNG generates integers in the interval , until discrete values are generated. Therefore, if an integer is generated twice, it is discarded the second time. The result is a list of non-repeating integers, denoted as .After this process is finished, the map is iterated again times, to generate the values . The i index here denotes that the map is iterated consecutively from the previous process of generating S.
- Step 3.
- The confusion is reversed asThe resulting elements are combined in a vector as Equation (42).
- Step 4.
- The next step is to reverse the shuffling of the elements of .The elements of S from Step 2 indicate the shuffling that was originally performed in the encryption process. The procedure is reversed, by moving the first element into the position, the second element into the position, and so on, until the last element is moved into the position. The new matrix is denoted as .
- Step 5.
- Finally, the elements of are reshaped into an matrix , where each column represents the plaintext control point.
- Output.
- A plaintext B-spline curve described by its control points arranged in a matrix , the polynomial degree n, and a knot sequence U.
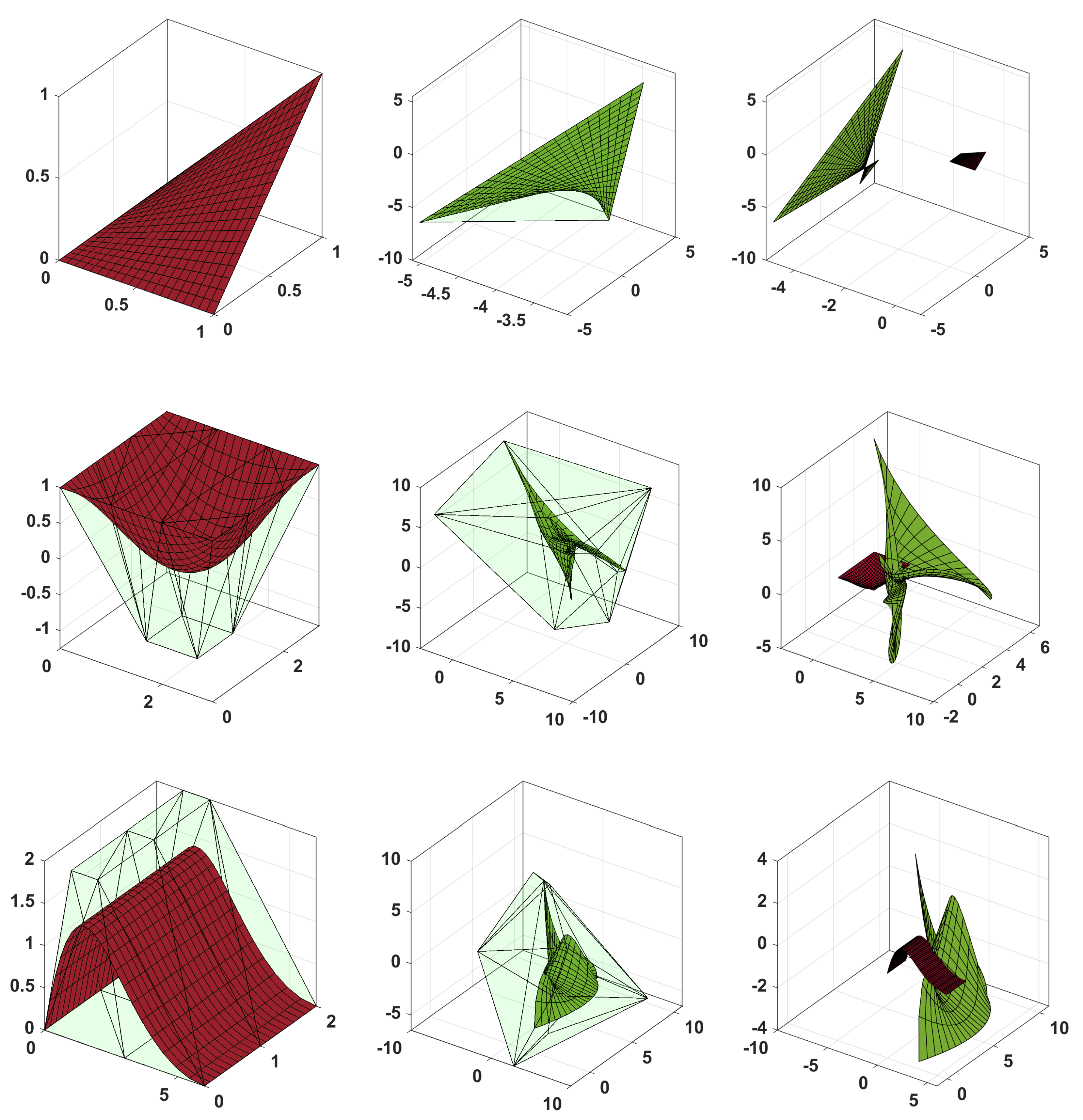
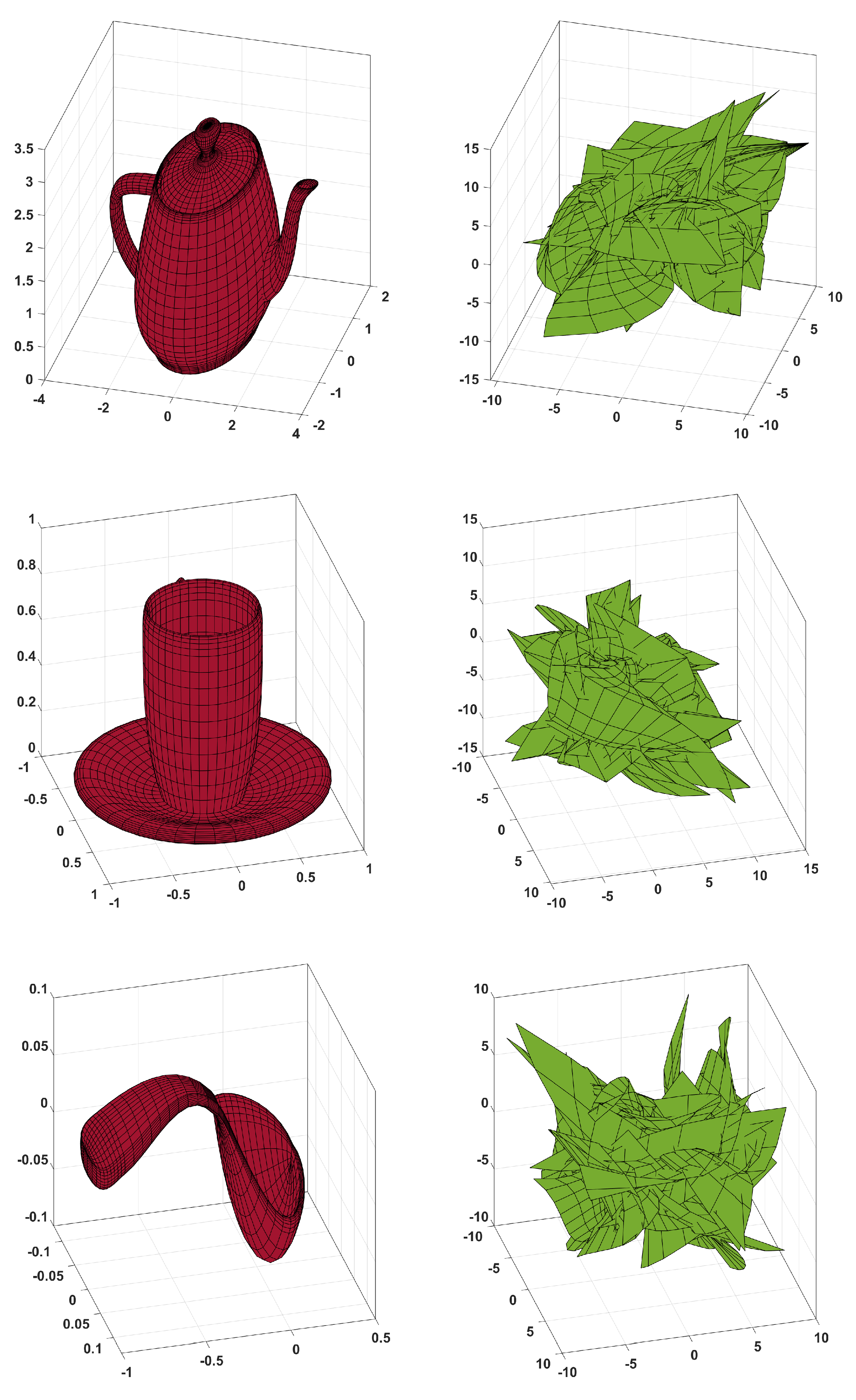
7. Patch Encryption
8. Simulation Results
8.1. Map Choice
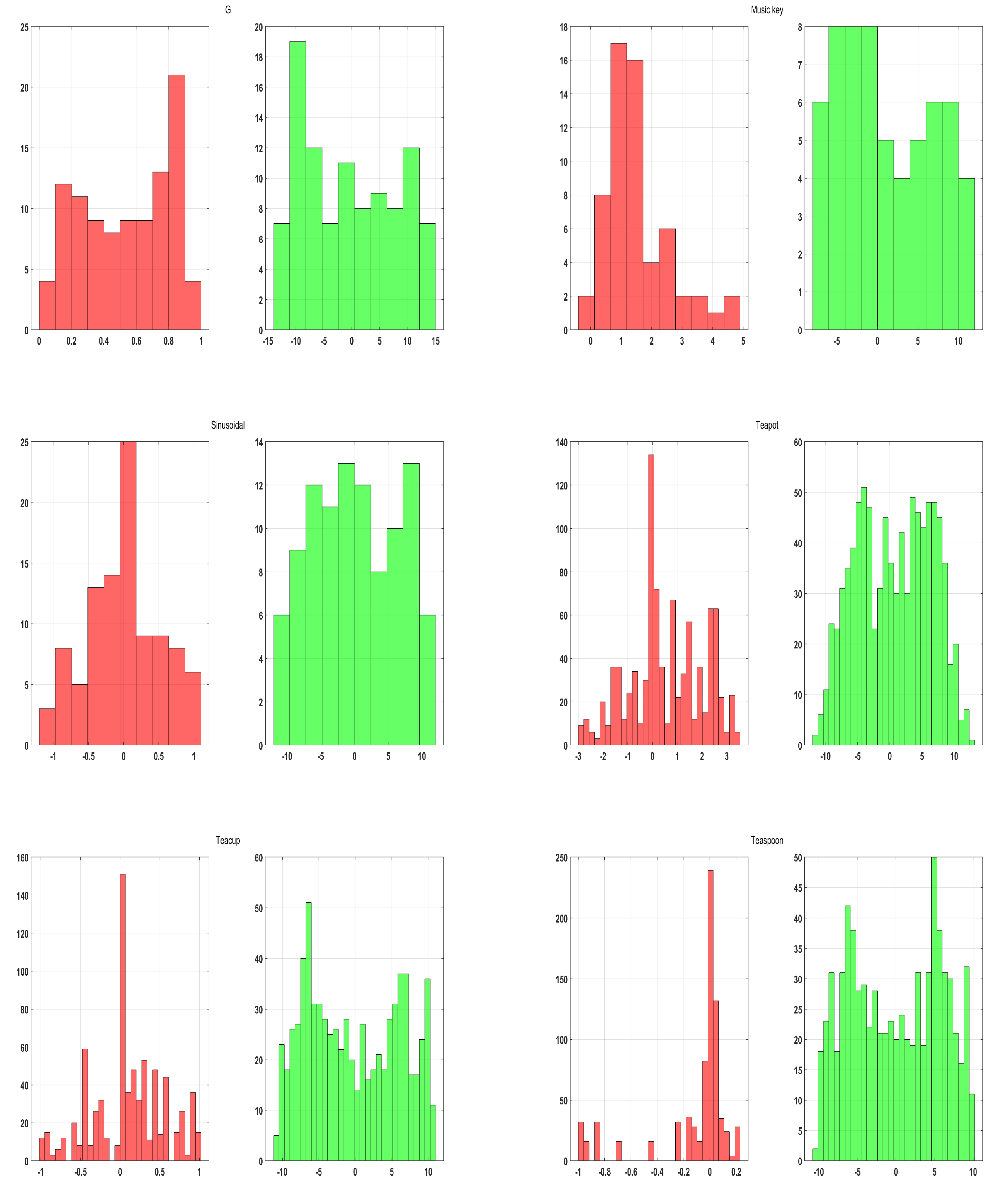
8.2. Histogram Analysis
8.3. Correlation
8.4. Noise
8.5. Key Space
8.6. Key Sensitivity
9. Conclusions and Future Goals
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Grassi, G. Chaos in the Real World: Recent Applications to Communications, Computing, Distributed Sensing, Robotic Motion, Bio-Impedance Modelling and Encryption Systems. Symmetry 2021, 13, 2151. [Google Scholar] [CrossRef]
- Moysis, L.; Butusov, D.N.; Tutueva, A.; Ostrovskii, V.; Kafetzis, I.; Volos, C. Introducing Chaos and Chaos Based Encryption Applications to University Students-Case Report of a Seminar. In Proceedings of the 2022 11th International Conference on Modern Circuits and Systems Technologies (MOCAST), Bremen, Germany, 8–10 June 2022; pp. 1–6. [Google Scholar]
- Özkaynak, F. Brief review on application of nonlinear dynamics in image encryption. Nonlinear Dyn. 2018, 92, 305–313. [Google Scholar] [CrossRef]
- Akmeşe, Ö.F. Bibliometric Analysis of Publications on Chaos Theory and Applications during 1987–2021. Chaos Theory Appl. 2022, 4, 169–178. [Google Scholar] [CrossRef]
- Natiq, H.; Banerjee, S.; Said, M. Cosine chaotification technique to enhance chaos and complexity of discrete systems. Eur. Phys. J. Spec. Top. 2019, 228, 185–194. [Google Scholar] [CrossRef]
- Hua, Z.; Zhou, B.; Zhou, Y. Sine chaotification model for enhancing chaos and its hardware implementation. IEEE Trans. Ind. Electron. 2018, 66, 1273–1284. [Google Scholar] [CrossRef]
- Hua, Z.; Zhang, Y.; Zhou, Y. Two-dimensional modular chaotification system for improving chaos complexity. IEEE Trans. Signal Process. 2020, 68, 1937–1949. [Google Scholar] [CrossRef]
- Mansouri, A.; Wang, X. A novel one-dimensional chaotic map generator and its application in a new index representation-based image encryption scheme. Inf. Sci. 2021, 563, 91–110. [Google Scholar] [CrossRef]
- Wu, Q. Cascade-sine chaotification model for producing chaos. Nonlinear Dyn. 2021, 106, 2607–2620. [Google Scholar] [CrossRef]
- Belazi, A.; Kharbech, S.; Aslam, M.N.; Talha, M.; Xiang, W.; Iliyasu, A.M.; Abd El-Latif, A.A. Improved Sine-Tangent chaotic map with application in medical images encryption. J. Inf. Secur. Appl. 2022, 66, 103131. [Google Scholar] [CrossRef]
- Lu, Q.; Yu, L.; Zhu, C. Symmetric Image Encryption Algorithm Based on a New Product Trigonometric Chaotic Map. Symmetry 2022, 14, 373. [Google Scholar] [CrossRef]
- Zhu, H.; Ge, J.; Qi, W.; Zhang, X.; Lu, X. Dynamic analysis and image encryption application of a sinusoidal-polynomial composite chaotic system. Math. Comput. Simul. 2022, 198, 188–210. [Google Scholar] [CrossRef]
- Hua, Z.; Zhou, Y. Exponential chaotic model for generating robust chaos. IEEE Trans. Syst. Man Cybern. Syst. 2019, 51, 3713–3724. [Google Scholar] [CrossRef]
- Zang, H.; Yuan, Y.; Wei, X. Research on Pseudorandom Number Generator Based on Several New Types of Piecewise Chaotic Maps. Math. Probl. Eng. 2021, 2021, 1375346. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, L. A novel image encryption algorithm based on SPWLCM and DNA coding. Math. Comput. Simul. 2021, 190, 723–744. [Google Scholar] [CrossRef]
- Ablay, G. Lyapunov Exponent Enhancement in Chaotic Maps with Uniform Distribution Modulo One Transformation. Chaos Theory Appl. 2022, 4, 45–58. [Google Scholar] [CrossRef]
- Khairullah, M.K.; Alkahtani, A.A.; Bin Baharuddin, M.Z.; Al-Jubari, A.M. Designing 1D Chaotic Maps for Fast Chaotic Image Encryption. Electronics 2021, 10, 2116. [Google Scholar] [CrossRef]
- Moysis, L.; Kafetzis, I.; Baptista, M.S.; Volos, C. Chaotification of One-Dimensional Maps Based on Remainder Operator Addition. Mathematics 2022, 10, 2801. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, H.; Ban, P.; Wang, Y.; Zhang, L.Y. Buffeting Chaotification Model for Enhancing Chaos and Its Hardware Implementation. IEEE Trans. Ind. Electron. 2022, 70, 2916–2926. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, C. A novel parallel chaotic system with greatly improved Lyapunov exponent and chaotic range. Int. J. Mod. Phys. B 2020, 34, 2050048. [Google Scholar] [CrossRef]
- Dong, C.; Rajagopal, K.; He, S.; Jafari, S.; Sun, K. Chaotification of Sine-series maps based on the internal perturbation model. Results Phys. 2021, 31, 105010. [Google Scholar] [CrossRef]
- Lawnik, M.; Berezowski, M. New Chaotic System: M-Map and Its Application in Chaos-Based Cryptography. Symmetry 2022, 14, 895. [Google Scholar] [CrossRef]
- Ablay, G. Chaotic map construction from common nonlinearities and microcontroller implementations. Int. J. Bifurc. Chaos 2016, 26, 1650121. [Google Scholar] [CrossRef]
- Liu, L.; Wang, J. A cluster of 1D quadratic chaotic map and its applications in image encryption. Math. Comput. Simul. 2023, 204, 89–114. [Google Scholar] [CrossRef]
- Akgul, A.; Kacar, S.; Pehlivan, I.; Aricioglu, B. Chaos-based encryption of multimedia data and design of security analysis interface as an educational tool. Comput. Appl. Eng. Educ. 2018, 26, 1336–1349. [Google Scholar] [CrossRef]
- Abdallah, H.A.; Meshoul, S. A Multilayered Audio Signal Encryption Approach for Secure Voice Communication. Electronics 2023, 12, 2. [Google Scholar] [CrossRef]
- Wang, X.; Xu, M.; Li, Y. Fast encryption scheme for 3D models based on chaos system. Multimed. Tools Appl. 2019, 78, 33865–33884. [Google Scholar] [CrossRef]
- Gao, S.; Wu, R.; Wang, X.; Wang, J.; Li, Q.; Wang, C.; Tang, X. A 3D model encryption scheme based on a cascaded chaotic system. Signal Process. 2023, 202, 108745. [Google Scholar] [CrossRef]
- Gao, X.; Miao, M.; Chen, X. Multi-image encryption algorithm for 2D and 3D images based on chaotic system. Front. Phys. 2022, 10, 498. [Google Scholar] [CrossRef]
- Piegl, L.; Tiller, W. The NURBS Book; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Deng, C.; Lin, H. Progressive and iterative approximation for least squares B-spline curve and surface fitting. Comput.-Aided Des. 2014, 47, 32–44. [Google Scholar] [CrossRef]
- Hu, H.; Beck, J.; Lauer, M.; Stiller, C. Continuous Fusion of Motion Data Using an Axis-Angle Rotation Representation with Uniform B-spline. Sensors 2021, 21, 5004. [Google Scholar] [CrossRef]
- Majeed, A.; Abbas, M.; Qayyum, F.; Miura, K.T.; Misro, M.Y.; Nazir, T. Geometric modeling using new Cubic trigonometric B-spline functions with shape parameter. Mathematics 2020, 8, 2102. [Google Scholar] [CrossRef]
- Noreen, I. Collision free smooth path for mobile robots in cluttered environment using an economical clamped cubic B-spline. Symmetry 2020, 12, 1567. [Google Scholar] [CrossRef]
- Marinić-Kragić, I.; Perišić, S.; Vučina, D.; Ćurković, M. Superimposed RBF and B-spline parametric surface for reverse engineering applications. Integr.-Comput.-Aided Eng. 2020, 27, 17–35. [Google Scholar] [CrossRef]
- Zachariadis, O.; Teatini, A.; Satpute, N.; Gómez-Luna, J.; Mutlu, O.; Elle, O.J.; Olivares, J. Accelerating B-spline interpolation on GPUs: Application to medical image registration. Comput. Methods Programs Biomed. 2020, 193, 105431. [Google Scholar] [CrossRef]
- Hua, Z.; Zhou, Y. Image encryption using 2D Logistic-adjusted-Sine map. Inf. Sci. 2016, 339, 237–253. [Google Scholar] [CrossRef]
- Pareek, N.; Patidar, V.; Sud, K. Cryptography using multiple one-dimensional chaotic maps. Commun. Nonlinear Sci. Numer. Simul. 2005, 10, 715–723. [Google Scholar] [CrossRef]
- Alzaidi, A.A.; Ahmad, M.; Doja, M.N.; Al Solami, E.; Beg, M.S. A New 1D Chaotic Map and β-Hill Climbing for Generating Substitution-Boxes. IEEE Access 2018, 6, 55405–55418. [Google Scholar] [CrossRef]
- Moysis, L. Introduction to Computer Aided Geometric Design—A Student’s Companion with Matlab Examples. 2019. Available online: https://www.researchgate.net/profile/Lazaros-Moysis/publication/329337381_Introduction_to_Computer_Aided_Geometric_Design_-_A_student’s_companion_with_Matlab_examples_2nd_Edition/links/5c66dcfb4585156b57ffdffb/Introduction-to-Computer-Aided-Geometric-Design-A-students-companion-with-Matlab-examples-2nd-Edition.pdf (accessed on 30 January 2023).
- Burkardt, J. Teapot, Teacup, Teaspoon Data Files. 2006. Available online: https://people.sc.fsu.edu/~jburkardt/data/bezier_surface/bezier_surface.html (accessed on 30 January 2023).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chaotic System | ||||
|---|---|---|---|---|
| Sine (17) | Sine–Sine (21) | Cosine–Logistic (24) | Renyi (27) | |
| Seed | ||||
| Modified | ||||
| Chaotic System | |||||
|---|---|---|---|---|---|
| Operation | (2) () | Mod. Sine (19) | Mod. Sine–Sine (23) | Mod. Cos.–Logistic (26) | Mod. Renyi (29) |
| Addition | m (3) | 3 | 3 | 4 | 3 |
| Multiplication | m (3) | 5 | 5 | 6 | 4 |
| Sinusoidal | 0 | 1 | 2 | 1 | 0 |
| Remainder | m (3) | 3 | 3 | 3 | 4 |
| Overall | 3m (9) | 12 | 13 | 14 | 11 |
| Original | Shuffled | Modulated | |
|---|---|---|---|
| Curve 1 (G) | 7.3333 | 7.3333 | 11.3333 |
| Curve 2 (music key) | 0.9290 | 0.9290 | 0.0572 |
| Curve 3 (sinusoidal) | 26.2222 | 26.2222 | 6.6667 |
| Teapot | 814.17 | 814.17 | 244.66 |
| Teacup | 646.78 | 646.78 | 88.6448 |
| Teaspoon | 2707.6 | 2707.6 | 70.593 |
| Original | Shuffled | Modulated | |
|---|---|---|---|
| Curve 1 (G) | 0.9573 | −0.1049 | −0.0361 |
| Curve 2 (music key) | 0.9290 | 0.0812 | 0.0572 |
| Curve 3 (sinusoidal) | 0.8523 | −0.0142 | −0.1371 |
| Teapot | 0.9144 | −0.0420 | 0.2114 |
| Teacup | 0.8356 | 0.0049 | 0.1822 |
| Teaspoon | 0.9788 | 0.0330 | 0.2180 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moysis, L.; Lawnik, M.; Antoniades, I.P.; Kafetzis, I.; Baptista, M.S.; Volos, C. Chaotification of 1D Maps by Multiple Remainder Operator Additions—Application to B-Spline Curve Encryption. Symmetry 2023, 15, 726. https://doi.org/10.3390/sym15030726
Moysis L, Lawnik M, Antoniades IP, Kafetzis I, Baptista MS, Volos C. Chaotification of 1D Maps by Multiple Remainder Operator Additions—Application to B-Spline Curve Encryption. Symmetry. 2023; 15(3):726. https://doi.org/10.3390/sym15030726
Chicago/Turabian StyleMoysis, Lazaros, Marcin Lawnik, Ioannis P. Antoniades, Ioannis Kafetzis, Murilo S. Baptista, and Christos Volos. 2023. "Chaotification of 1D Maps by Multiple Remainder Operator Additions—Application to B-Spline Curve Encryption" Symmetry 15, no. 3: 726. https://doi.org/10.3390/sym15030726
APA StyleMoysis, L., Lawnik, M., Antoniades, I. P., Kafetzis, I., Baptista, M. S., & Volos, C. (2023). Chaotification of 1D Maps by Multiple Remainder Operator Additions—Application to B-Spline Curve Encryption. Symmetry, 15(3), 726. https://doi.org/10.3390/sym15030726