
Solving a System of Caputo Fractional-Order Volterra Integro-Differential Equations with Variable Coefficients Based on the Finite Difference Approximation via the Block-by-Block Method


Abstract
:1. Introduction
2. Definition of the Problem
3. Preliminaries
3.1. Fractional Operators
3.2. Review Some of Integrated Formulas: [23,24,25,28]
4. Proposed Method
4.1. Two-Block Method
| Algorithm 1: Two-Block Method (BMP2) |
Step 1:
Step 2: for each :
For all doing steps 3–8: Step 3: For each :
Step 4: For each . For each , If then else evaluate: Step 5: For each :
Step 6: For each . For each , If then put else evaluate: Step 7: for each . Compute and for all ; , from the system: and Step 8: for each : set |
4.2. Three-Block Method
| Algorithm 2: Three-Block Method (BMP3) |
Step 1:
Step 5: For each :
Step 7: For each :
Step 9: For each . Compute and for all ; , from the system: and Step 10: For each :
Step 12: For each :
Step 14: For each :
Step 16: for each . Compute and for all ; , from the system: And Step 17: for each : set ; . |
5. Implementation of the Method
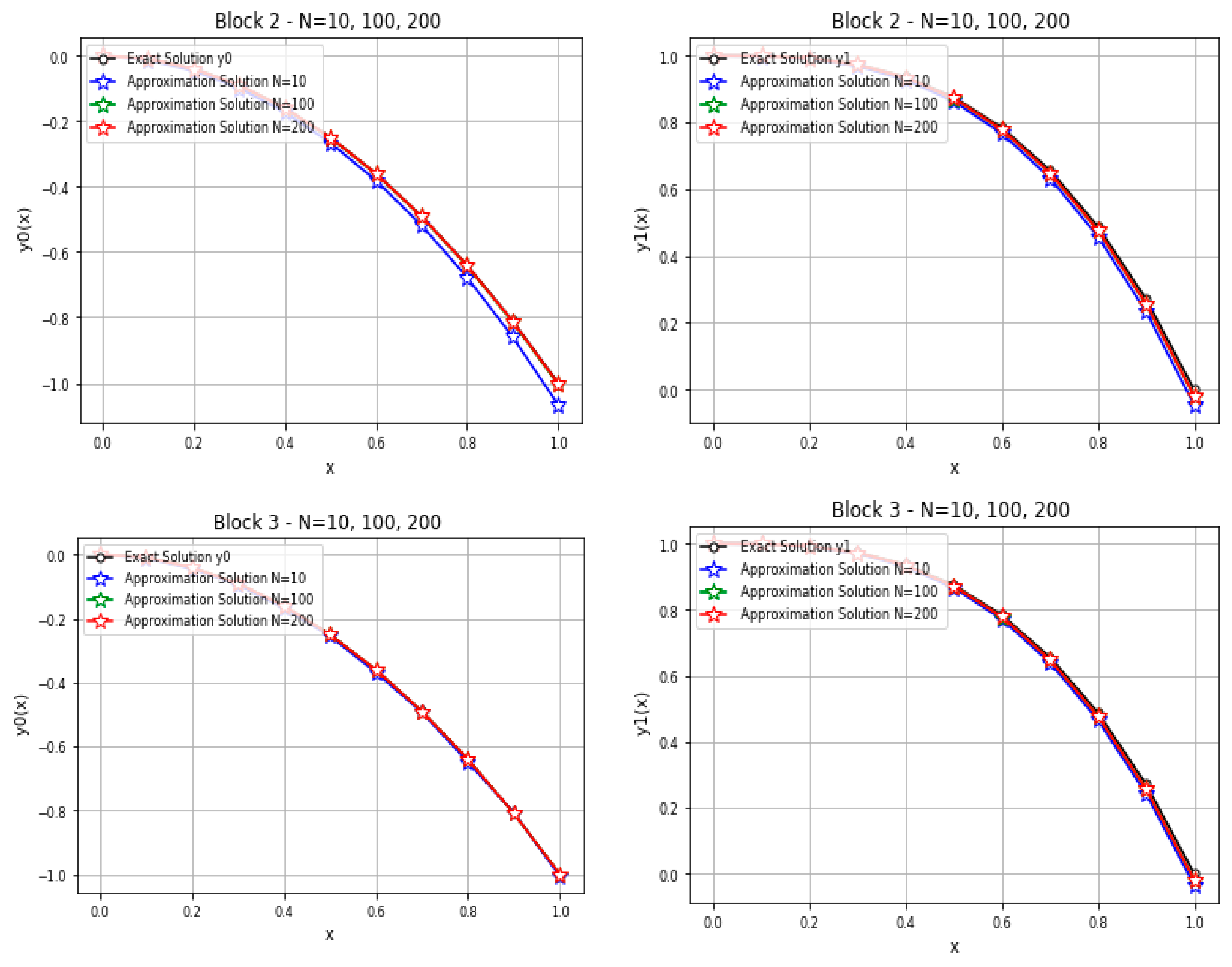
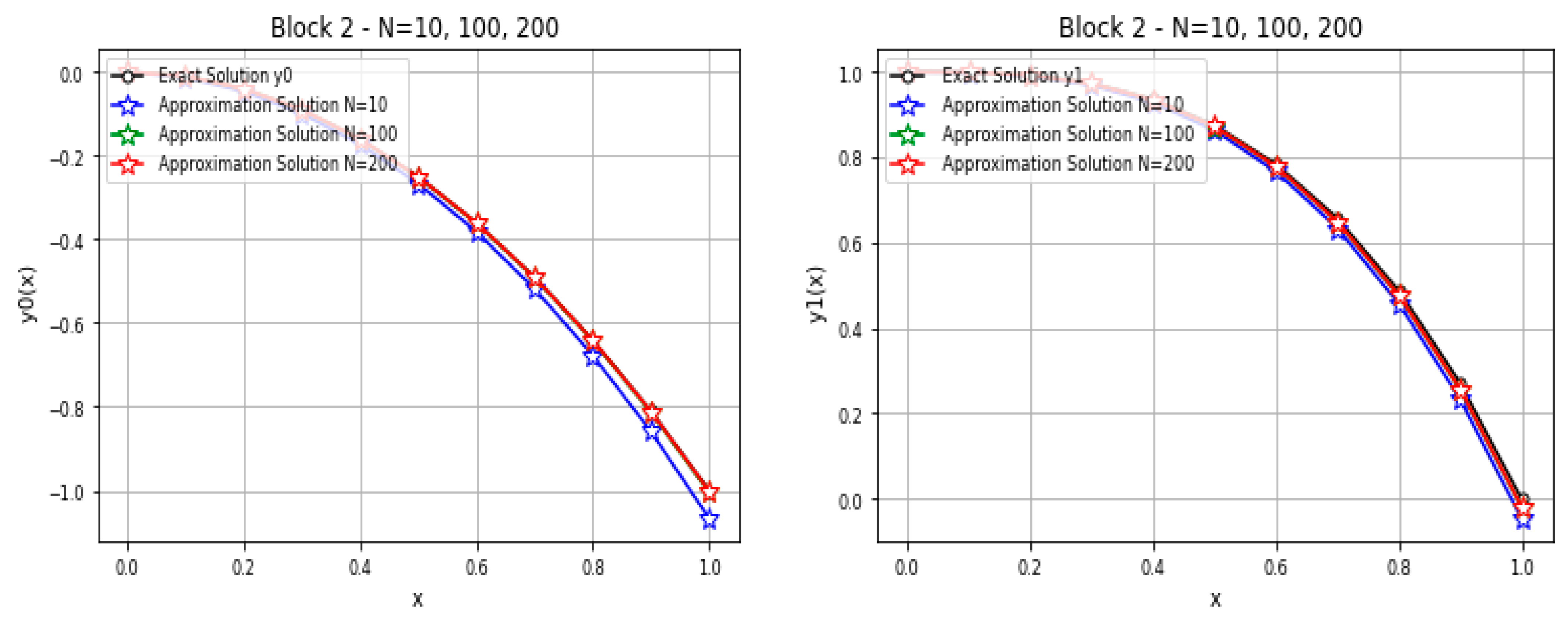
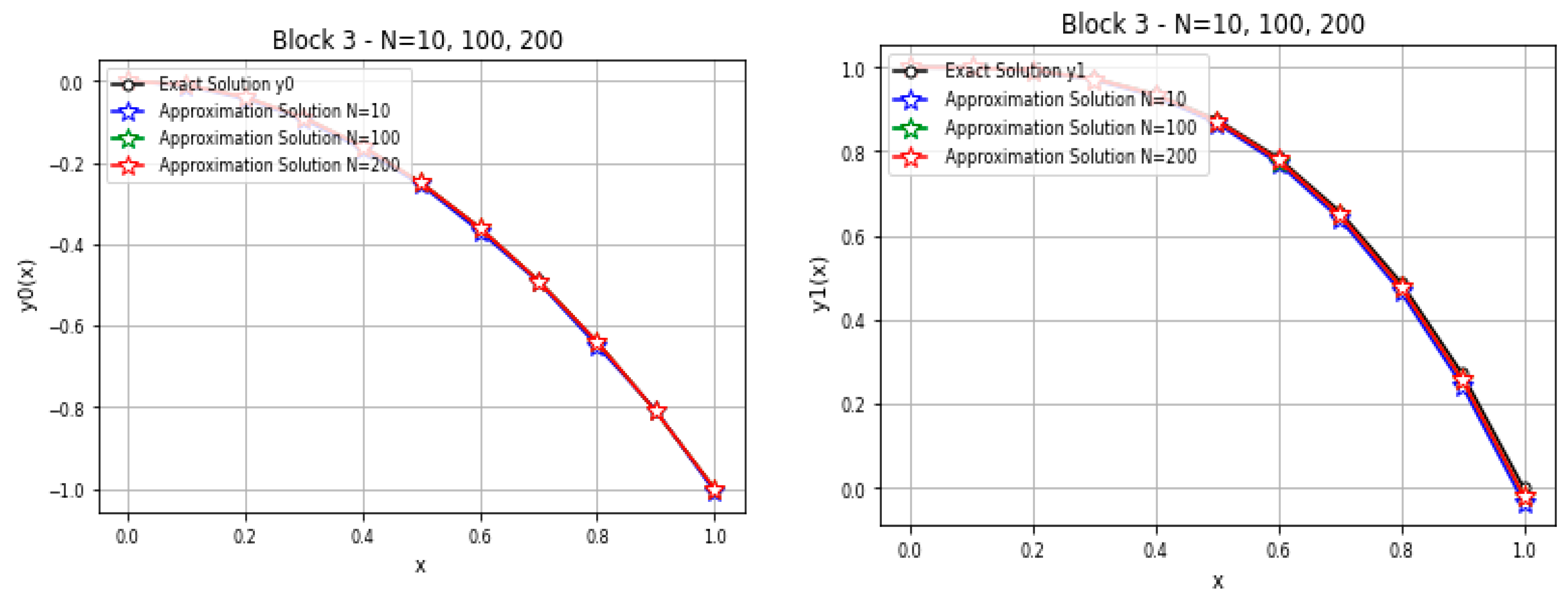
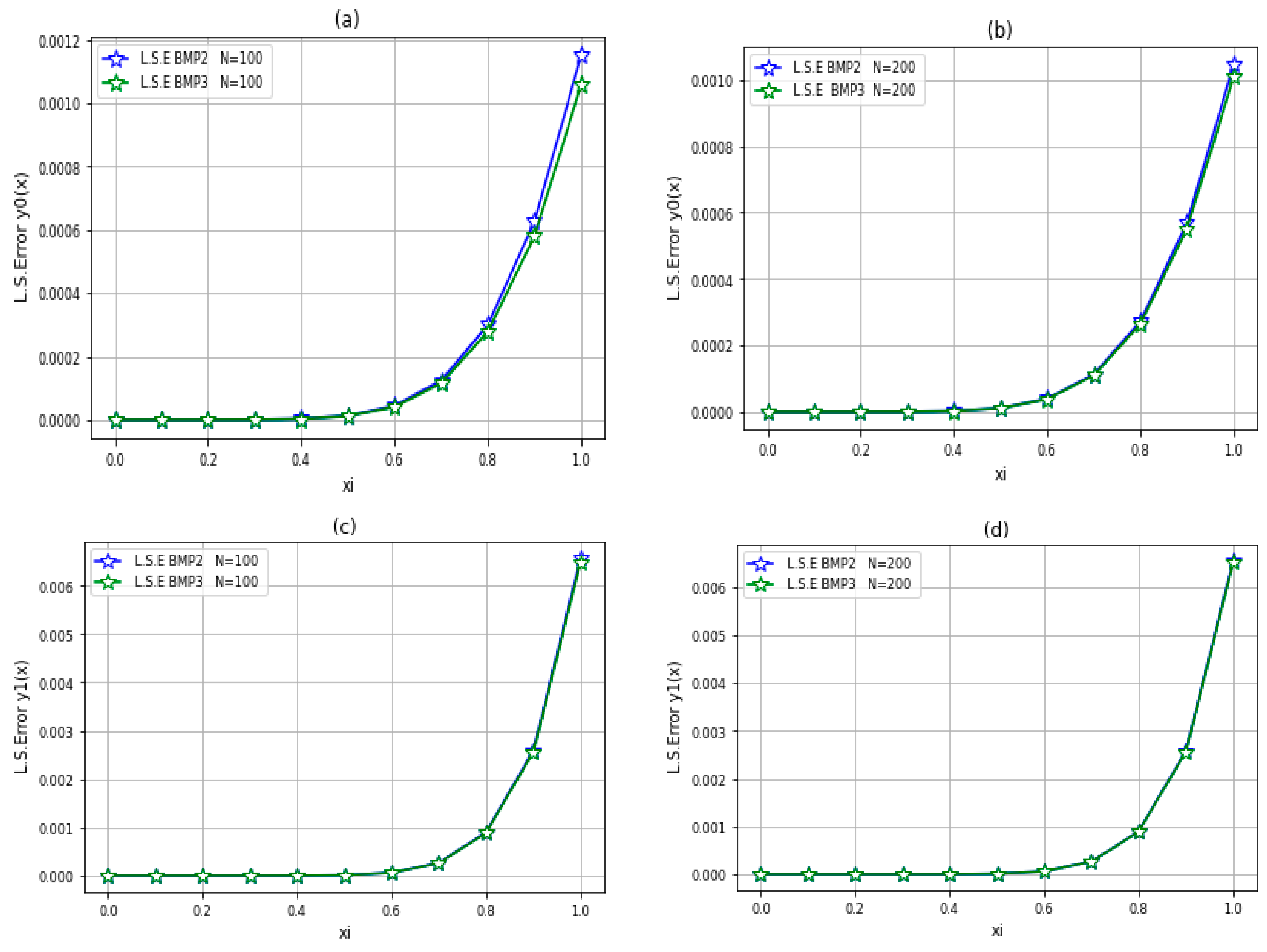
6. Discussion
- The numerical experiments have shown that the three-block method (BMP3) gives better accuracy than the two-block method (BMP2);
- Where are sufficiently large number, the error to be minimizes and the results are approached to the exact solution;
- The two-block method (BMP2) is faster, and lower in accuracy, than the three-block method (BMP3).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Podldubny, I. Fractional Differential Equation; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Sabatier, J.; Agrawal, O.P.; Machado, J.A.T. Advances in Fractional Calculus: Theoretical Developments and Applications in Physics and Engineering; Beijing World Publishing Corporation: Beijing, China, 2014. [Google Scholar]
- Miller, K.S.; Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations; John Wiley & Sons: New York, NY, USA, 1993. [Google Scholar]
- Podlubny, I. Geometric and Physical Interpretation of Fractional Integral and Fractional Differentiation. J. Fract. Calc. Appl. Anal. 2002, 5, 367–386. [Google Scholar]
- Erturk, V.S.; Kumar, P. Solution of a COVID-19 model via new generalized Caputo-type fractional derivatives. Chaos Solitons Fractals 2020, 139, 110280. [Google Scholar] [CrossRef] [PubMed]
- Iomin, A. Fox H-Functions in Self-Consistent Description of a Free-Electron Laser. Fractal Fract. 2021, 5, 263. [Google Scholar] [CrossRef]
- Turab, A.; Rosli, N. Study of Fractional Differential Equations Emerging in the Theory of Chemical Graphs: A Robust Approach. Mathematics 2022, 10, 4222. [Google Scholar] [CrossRef]
- Turab, A.; Mitrović, Z.D.; Savić, A. Existence of solutions for a class of nonlinear boundary value problems on the hexasilinane graph. Adv. Differ. Equ. 2021, 494. [Google Scholar] [CrossRef]
- Liu, J.-G.; Yang, X.-J.; Geng, L.-L.; Yu, X.-J. On fractional symmetry group scheme to the higher-dimensional space and time fractional dissipative Burger’s equation. Int. J. Geom. Methods Mod. Phys. 2022, 19, 2250173. [Google Scholar] [CrossRef]
- Baleanu, D.; Jajarmi, A.; Asad, J.H.; Blaszczyk, T. The Motion of a Bead Sliding on a Wire in Fractional Sense. Acta Phys. Pol. A 2017, 131, 1561–1564. [Google Scholar] [CrossRef]
- Baleanu, D.; Jajarmi, A.; Mohammadi, H.; Rezapour, S. A new study on the mathematical modelling of human liver with Caputo-Fabrizio fractional derivative. Chaos Soliton. Fractals 2020, 134, 109705. [Google Scholar] [CrossRef]
- Hesameddini, E.; Shahbazi, M. Hybrid Bernstein block–pulse functions for solving system of fractional integro-differential equations. Int. J. Comput. Math. 2018, 95, 2287–2307. [Google Scholar] [CrossRef]
- Ahmed, S.S. Solving a System of Fractional-Order Volterra Integro-Differential Equations Based on the Explicit Finite Difference Approximation via the Trapezoidal Method with Error Analysis. Symmetry 2022, 14, 575. [Google Scholar] [CrossRef]
- Linz, P. Analytical and Numerical Methods for Volterra Integral Equations; SIAM: Philadelphia, PA, USA, 1985. [Google Scholar]
- Weilbeer, M. Efficient Numerical Methods for Fractional Differential Equations and Their Analytical Background; US Army Medical Research and Material Command: Fort Detrick, MD, USA, 2005.
- Hosseini, M.M. Adomian decomposition method for solution of nonlinear differential algebraic equations. Appl. Math. Comput. 2006, 181, 1737–1744. [Google Scholar] [CrossRef]
- Odibat, Z.; Momani, S.; Xu, H. A reliable algorithm of homotopy analysis method for solving nonlinear fractional differential equations. Appl. Math. Model. 2010, 34, 593–600. [Google Scholar] [CrossRef]
- Rawashdeh, E.A. Numerical solution of fractional integro-differential equations by collocation method. Appl. Math. Comput. 2006, 176, 1–6. [Google Scholar] [CrossRef]
- Doha, E.H.; Bhrawy, A.H.; Ezz-Eldien, S.S. A new Jacobi operational matrix: An application for solving fractional differential equations. Appl. Math. Model. 2012, 36, 4931–4943. [Google Scholar] [CrossRef]
- Mustafa, M.; Ibrahem, T.A.L. Numerical Solution of Volterra Integral Equations with Delay Using Block Method. Al-Fatih J. 2008, 4, 42–51. [Google Scholar]
- Katani, R.; Shamorad, S. Block-by-Block method for the system of nonlinear Volterra integral equations. Appl. Math. Model. 2010, 34, 400–406. [Google Scholar] [CrossRef]
- Mohamad, M.B. Numerical Treatment for Solving Linear Fractional-Order Volterra Integro-Differential Equations with Constant Time-Delay of Retarded. Master’s Thesis, University of Sulaimani, Sulaimani, Iraq, 2016. [Google Scholar]
- Saleh, A.J. Numerical Solutions of Systems of Nonlinear Volterra Integro Differential Equations [VIDEs] Using Block Method. J. Glob. Sci. Res. Appl. Math. Stat. 2022, 7, 2452–2463. [Google Scholar]
- Ahmed, S.S.; Salh, S.A.H. Numerical Treatment of the most General Linear Volterra Integro-Fractional Differential Equations with Caputo Derivatives by Quadrature Methods. J. Math. Comput. Sci. 2012, 2, 1293–1311. [Google Scholar]
- Salih, S.A.H. Some Computational Methods for Solving Linear Volterra Integro-Fractional Differential Equations. Master’s Thesis, University of Sulaimani, Sulaimani, Iraq, 2011. [Google Scholar]
- Ahmed, S.S. On System of Linear Volterra Integro-Fractional Differential Equations. Ph.D. Thesis, Sulaimani University, Sulaimani, Iraq, 2009. [Google Scholar]
- Chenecy, W.; Kincaid, D. Numerical Mathematics and Computation, 4th ed.; ITP An international Thomson Publishing Company: Kyoto, Japan, 1999. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 15.95769122 | |||
| 104.41779068 | |||
|
L.S.E | L.S.E | |||||
| Block-by-Block Method | ||||||
|---|---|---|---|---|---|---|
|
L.S.E | L.S.E | |||||
| = 1.720833539 | ||||||
| Block-by-Block Method | ||||||
|---|---|---|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, S.S.; Hamasalih, S.A. Solving a System of Caputo Fractional-Order Volterra Integro-Differential Equations with Variable Coefficients Based on the Finite Difference Approximation via the Block-by-Block Method. Symmetry 2023, 15, 607. https://doi.org/10.3390/sym15030607
Ahmed SS, Hamasalih SA. Solving a System of Caputo Fractional-Order Volterra Integro-Differential Equations with Variable Coefficients Based on the Finite Difference Approximation via the Block-by-Block Method. Symmetry. 2023; 15(3):607. https://doi.org/10.3390/sym15030607
Chicago/Turabian StyleAhmed, Shazad Shawki, and Shokhan Ahmed Hamasalih. 2023. "Solving a System of Caputo Fractional-Order Volterra Integro-Differential Equations with Variable Coefficients Based on the Finite Difference Approximation via the Block-by-Block Method" Symmetry 15, no. 3: 607. https://doi.org/10.3390/sym15030607
APA StyleAhmed, S. S., & Hamasalih, S. A. (2023). Solving a System of Caputo Fractional-Order Volterra Integro-Differential Equations with Variable Coefficients Based on the Finite Difference Approximation via the Block-by-Block Method. Symmetry, 15(3), 607. https://doi.org/10.3390/sym15030607