
Computer Simulation of the Seismic Wave Propagation in Poroelastic Medium


Abstract
:1. Introduction
2. Material and Methods
2.1. Statement of the Problem
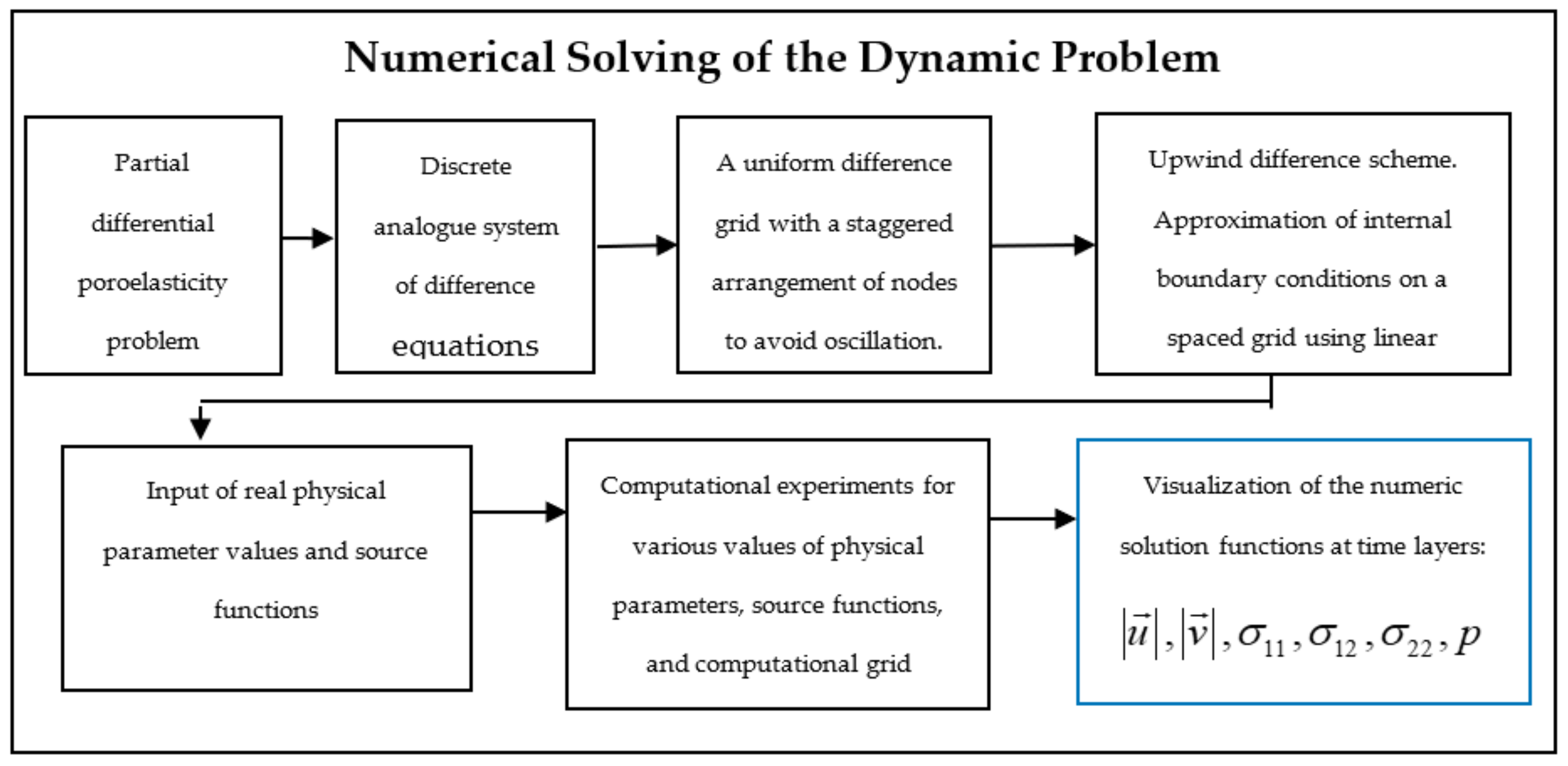
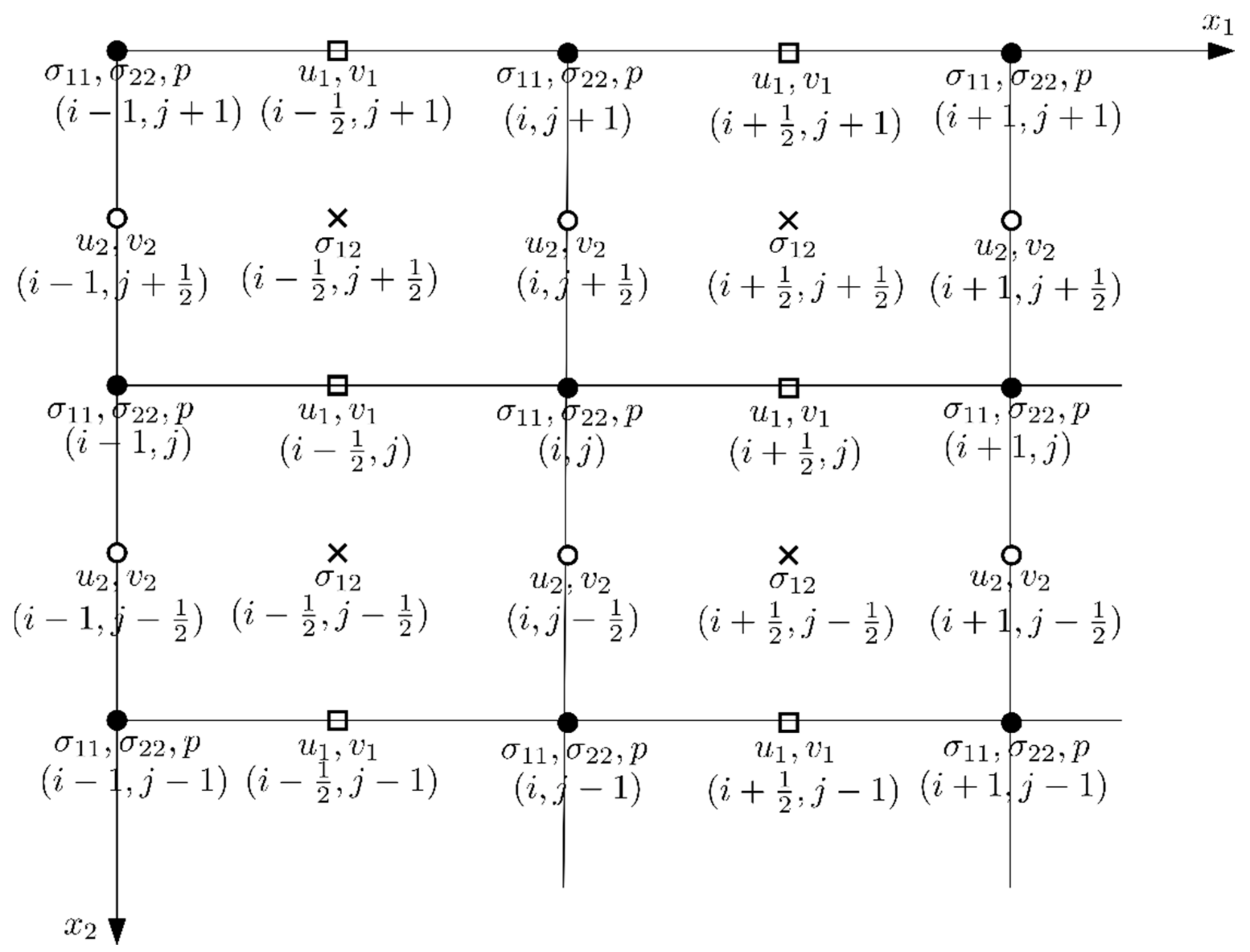
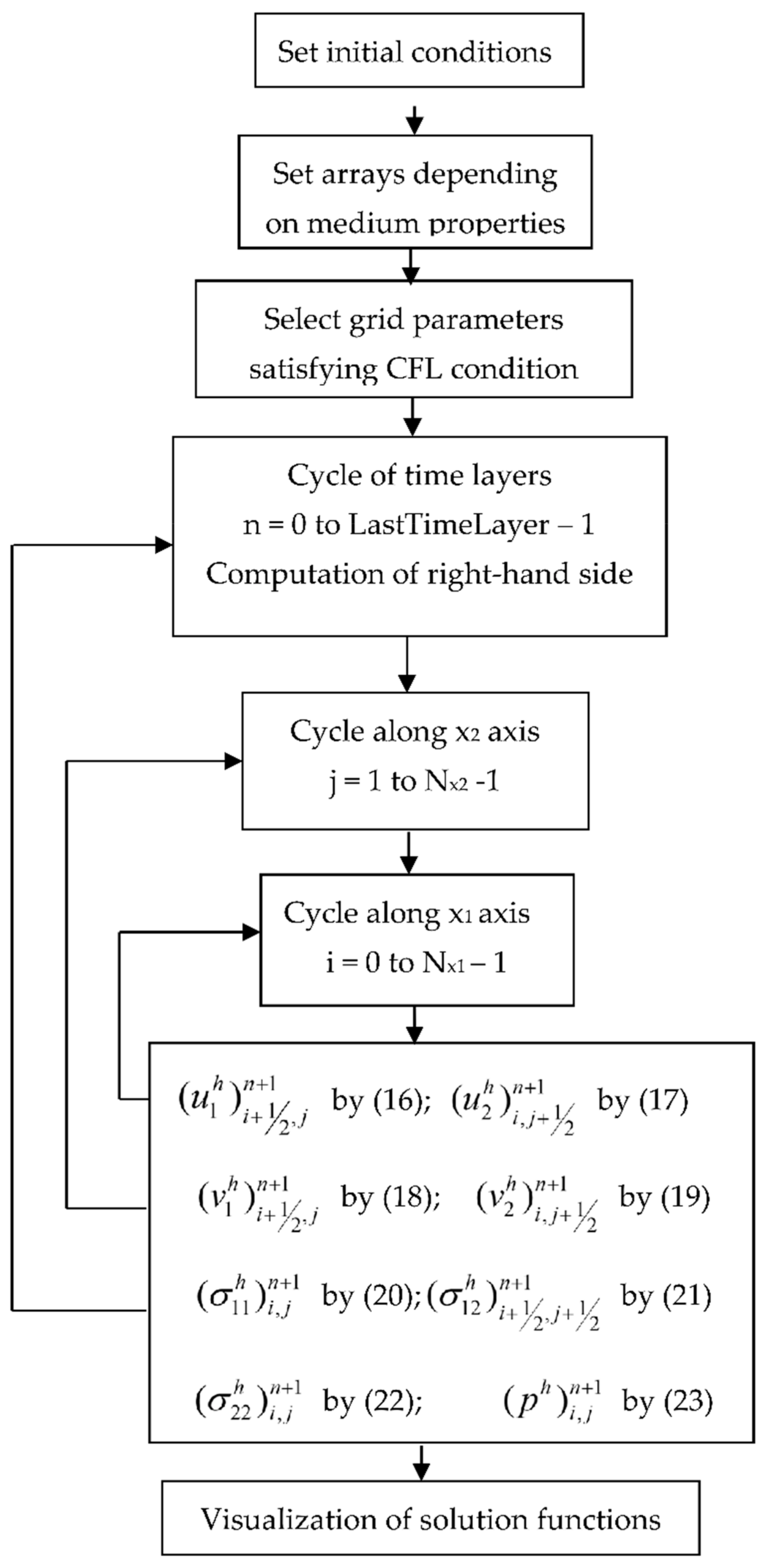
2.2. Discrete Approximation of the Problem
3. Results
3.1. Computational Experiments
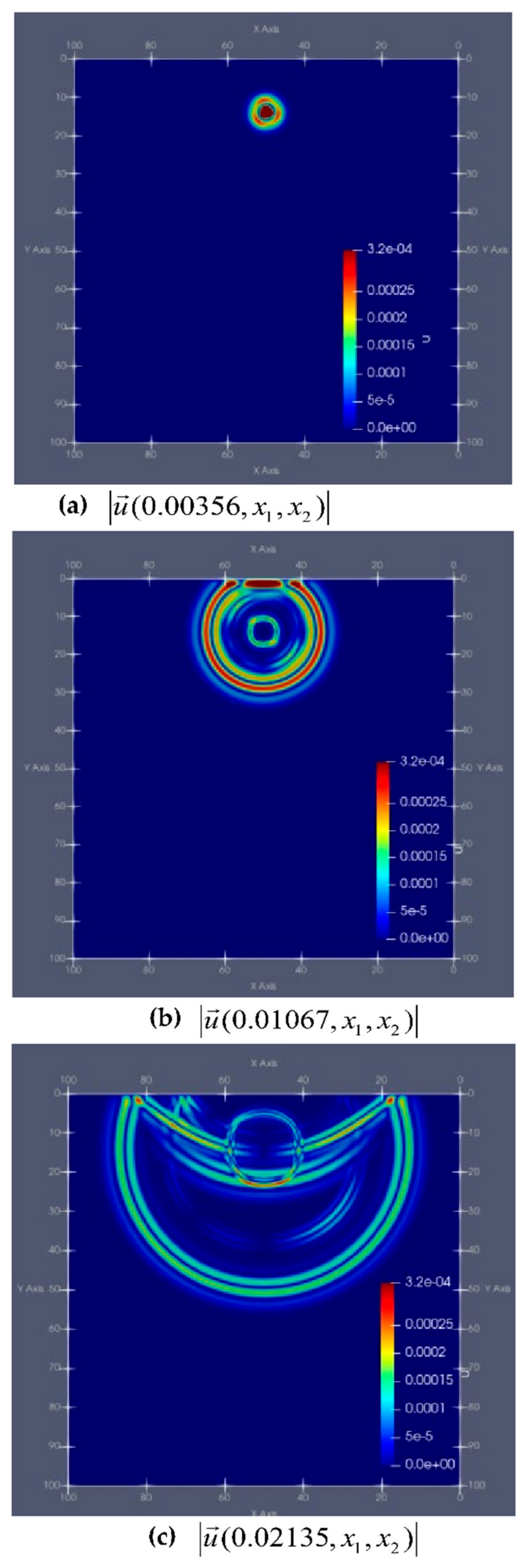
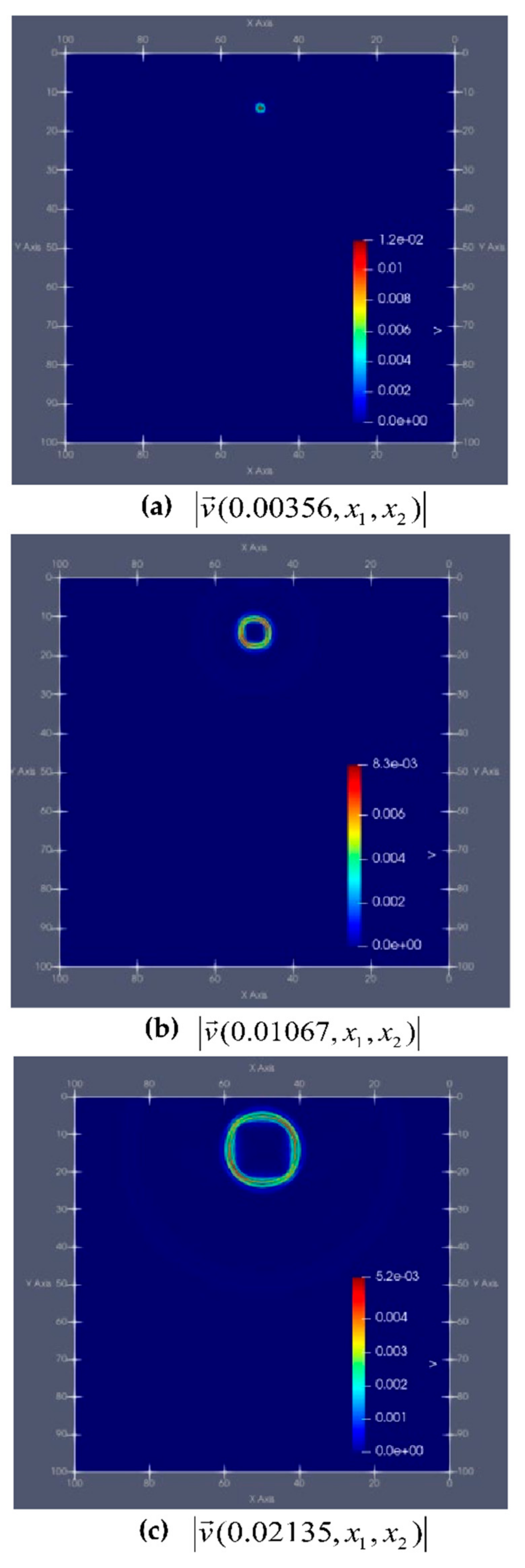
3.1.1. First Computational Experiment
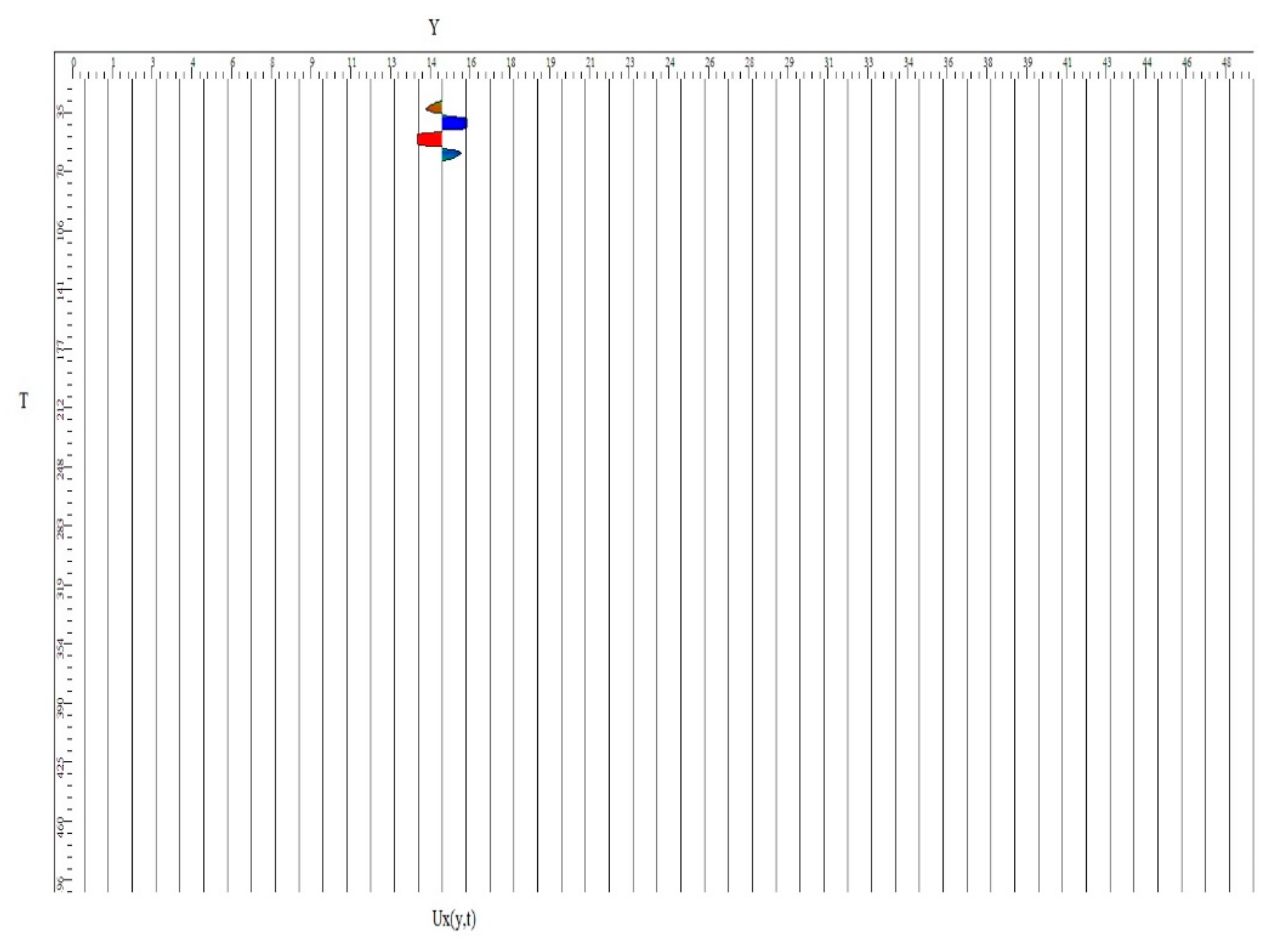
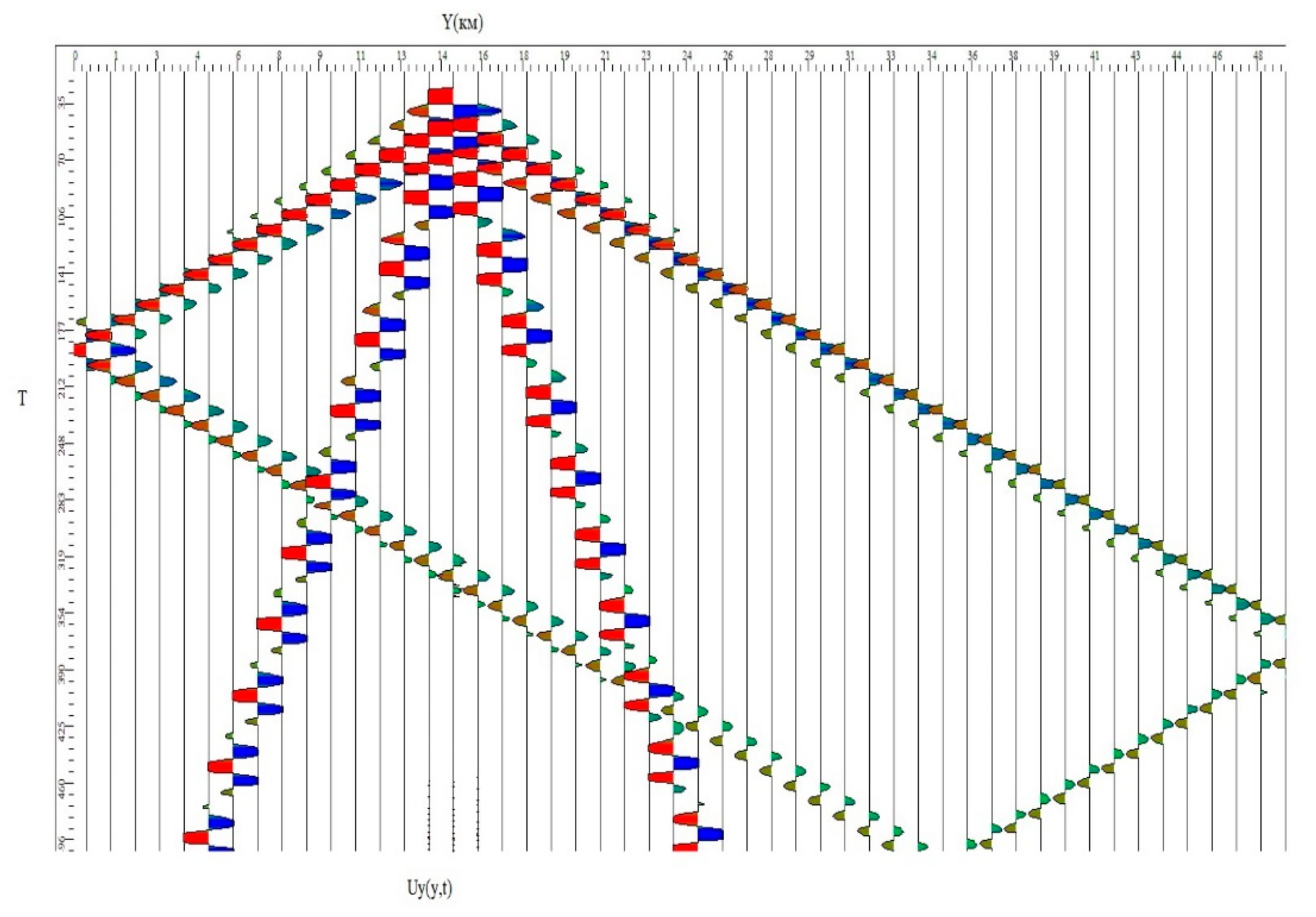
3.1.2. The Second Computational Experiment
4. Discussion
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Carcione, J.M.; Morency, C.; Santos, J.E. Computational poroelasticity—A review. Geophysics 2010, 75, 75A229–75A243. [Google Scholar] [CrossRef]
- Yang, Q.; Mao, W. Simulation of seismic wave propagation in 2-D poroelastic media using weighted-averaging finite difference stencils in the frequency space domain. Geophys. J. Int. 2017, 208, 148–161. [Google Scholar] [CrossRef]
- Duclous, R.; Dubroca, B.; Frank, M. A deterministic partial differential equation model for dose calculation in electron radiotherapy. Phys. Med. Biol. 2010, 55, 3843–3857. [Google Scholar] [CrossRef] [PubMed]
- Loureiro, J.M.; Rodrigues, A. Two solution methods for hyperbolic systems of partial differential equations in chemical engineering. Chem. Eng. Sci. 1991, 46, 3259–3267. [Google Scholar] [CrossRef]
- Lim, C.Y.; Lim, A.E.; Lam, Y.C. pH change in electroosmotic flow hysteresis. Anal. Chem. 2017, 89, 9394–9399. [Google Scholar] [CrossRef] [PubMed]
- Lim, A.E.; Lam, Y.C. Vertical Squeezing Route Taylor Flow with Angled Microchannel Junctions. Ind. Eng. Chem. Res. 2021, 60, 14307–14317. [Google Scholar] [CrossRef]
- Shafiq, A.; Lone, S.A.; Sindhu, T.N.; Al-Mdallal, Q.M.; Rasool, G. Statistical modeling for bioconvective tangent hyperbolic nanofluid towards stretching surface with zero mass flux condition. Sci. Rep. 2021, 11, 13869. [Google Scholar] [CrossRef]
- Frenkel, I.I. On the theory of seismic and seismoelectrical phenomena in wet soil. Izv. Acad. Sci. USSR Ser. Geogr. Geophys 1944, 8, 133–150. (In Russian) [Google Scholar] [CrossRef]
- Biot, M.A. Theory of propagation of elastic waves in fluid-saturated porous solids. J. Acoust. Soc. Am. 1956, 28, 168–186. [Google Scholar] [CrossRef]
- Dorovsky, V.N. Mathematical models of two-velocity media. Part I. Math. Comput. Modeling 1995, 21, 17–28. [Google Scholar] [CrossRef]
- Dorovsky, V.N.; Perepechko, Y.V. Mathematical models of two-velocity media. Part II. Math. Comput. Modeling 1996, 24, 69–80. [Google Scholar] [CrossRef]
- Dorovsky, V.N.; Perepechko, Y.V.; Fedorov, A.I. Stoneley waves in the Biot-Jonson and Continuum filtration theories. Russ. Geol. Geophys. 2012, 53, 471–479. [Google Scholar] [CrossRef]
- Zhu, X.; McMechan, G.A. Numerical simulation of seismic responses of poroelastic reservoirs using Biot theory. Geophysics 1991, 56, 328–339. [Google Scholar] [CrossRef]
- Zeng, Y.Q.; He, J.Q.; Liu, Q.H. The application of the perfectly matched layer in numerical modeling of wave propagation in poroelastic media. Geophysics 2001, 66, 1258–1266. [Google Scholar] [CrossRef]
- Philippacopoulos, A.J. Lamb’s problem for fluid-saturated porous media. Bull. Seismol. Soc. Am. 1988, 7, 908–923. [Google Scholar]
- Miroshnokov, V.V.; Fatianov, A.G. Semi-analytical method for calculating wave fields in layered porous media. Math. Modeling Geophys. 1993, 1, 27–57. [Google Scholar]
- Dai, N.; Vafidis, A.; Kanasewich, E.R. Wave propagation in heterogeneous, porous media: A velocity-stress, finite-difference method. Geophysics 1995, 60, 327–340. [Google Scholar] [CrossRef]
- Dorovsky, V.N.; Perepechko, Y.V.; Romenskiy, E.I. Wave processes in saturated elastically deformable medium. Phys. Combust. Explos. 1993, 1, 100–111. (In Russian) [Google Scholar]
- Sorokin, K.E.; Imomnazarov, K.K. Numerical solving of the liner two-dimensional dynamic problem in liquid-filled porous media. J. Sib. Fed. Univ. Math. Phys. 2010, 3, 256–261. (In Russian) [Google Scholar]
- Berdyshev, A.S.; Imomnazarov, K.K.; Tang, J.-G.; Mikhailov, A. The Laguerre spectral method as applied to the numerical solution of a two-dimensional linear dynamic seismic problem for porous media. Open Comput. Sci. 2016, 6, 208–212. [Google Scholar] [CrossRef]
- Dorovsky, V.N.; Imomnazarov, K.K. Mathematical model for the movement of a conducting liquid through a conducting porous medium. Math. Comput. Modeling 1994, 20, 91–97. [Google Scholar] [CrossRef]
- Imomnazarov, K.K.; Imomnazarov, S.K.; Mamatqulov, M.M.; Chernykh, E.G. The fundamental solution of the stationary two-velocity hydrodynamics equation with one pressure. In Bulletin of the Novosibirsk Computing Center; Series: Mathemaical Modeling in Geophysics; NCC Publisher: Novosibirsk, Russia, 2014. [Google Scholar]
- Meirmanov, A. Atlantis Studies in Differential Equations. In Mathematical Models for Poroelastic Flows; Springer: Berlin, Germany, 2014; Volume 1. [Google Scholar] [CrossRef]
- Berdyshev, A.S.; Imomnazarov, K.K.; Tang, J.-G.; Tuchieva, S. The symmetric form of poroelasticity dynamic equations in terms of velocities, stresses, and pressure. Open Eng. Former. Cent. Eur. J. Eng. 2016, 6, 322–325. [Google Scholar] [CrossRef]
- Blokhin, A.M.; Dorovsky, V.N. Mathematical Modeling in the Theory of Multi-Velocity Continuum; Nova Sci: New York, NY, USA, 1995. [Google Scholar]
- Garipov, T.T. Modeling of hydraulic fracturing in a poroelastic medium. Math. Modeling 2006, 18, 53–69. [Google Scholar]
- Virieux, J.; Calandra, H.; Plessix, R.E. A review of the spectral, pseudo-spectral, finite-difference and finite-element modelling techniques for geophysical imaging. Geophys. Prospect. 2011, 59, 794–813. [Google Scholar] [CrossRef]
- Carcione, J.M.; Herman, C.G.; Kroode, P.E. Y2K Review Article: Seismic Modeling. Rev. Lit. Arts Am. 2002, 67, 1304–1325. [Google Scholar]
- Breus, A.; Favorskaya, A.; Golubev, V.; Kozhemyachenko, A.; Petrov, I. Investigation of Seismic Stability of High-Rising Buildings Using Grid-Characteristic Method. Procedia Comput. Sci. 2019, 154, 305–310. [Google Scholar] [CrossRef]
- Volkov, K.N. Implementation of a splitting scheme on a staggered grid for calculating unsteady flows of a viscous incompressible fluid. Comput. Methods Program. 2005, 6, 269–282. (In Russian) [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Technical Characteristics |
|---|---|
| Processor | 16-core AMD Ryzen 9 3950X |
| Clock speed/Frequency | 3.5 GHz (Matisse) |
| RAM | 64 GB |
| ## | Name of the Input Physical and Grid Parameter | Notation | Value | Units |
|---|---|---|---|---|
| 1 | Matrix physical density | 1.5 | ||
| 2 | Fluid physical density | 1 | ||
| 3 | Fast longitudinal wave velocity | |||
| 4 | Slow longitudinal wave velocity | |||
| 5 | Transverse wave velocity | |||
| 6 | Porosity | |||
| 7 | Integration area along axis | 100 | ||
| 8 | Integration area along -axis | 100 | ||
| 9 | Number of nodes along axis | |||
| 10 | axis | |||
| 11 | Number of time layers | |||
| 12 | M | |||
| 13 | m | |||
| 14 | Step in time | s | ||
| 15 | The signal propagation time | s | ||
| 16 | Dimensionless source Parameter | 4 | ||
| 17 | The source central Frequency | 1 | Hz | |
| 18 | Source duration | 1 | S |
| ## | Name of the Input Physical and Grid Parameter | Notation | Value | Units |
|---|---|---|---|---|
| 1 | Matrix physical density | 1.5 | ||
| 2 | Fluid physical density | 1 | ||
| 3 | Fast longitudinal wave velocity | |||
| 4 | Slow longitudinal wave velocity | |||
| 5 | Transverse wave velocity | |||
| 6 | Porosity | |||
| 7 | axis | |||
| 8 | -axis | 10500 | ||
| 9 | axis | |||
| 10 | axis | |||
| 11 | Number of time layers | |||
| 12 | m | |||
| 13 | m | |||
| 14 | Step in time | s | ||
| 15 | The signal propagation time | 2.43 | s | |
| 16 | Dimensionless source parameter | 4 | ||
| 17 | The source central frequency | 1 | Hz | |
| 18 | Source duration | 1 | s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bliyeva, D.; Baigereyev, D.; Imomnazarov, K. Computer Simulation of the Seismic Wave Propagation in Poroelastic Medium. Symmetry 2022, 14, 1516. https://doi.org/10.3390/sym14081516
Bliyeva D, Baigereyev D, Imomnazarov K. Computer Simulation of the Seismic Wave Propagation in Poroelastic Medium. Symmetry. 2022; 14(8):1516. https://doi.org/10.3390/sym14081516
Chicago/Turabian StyleBliyeva, Dana, Dossan Baigereyev, and Kholmatzhon Imomnazarov. 2022. "Computer Simulation of the Seismic Wave Propagation in Poroelastic Medium" Symmetry 14, no. 8: 1516. https://doi.org/10.3390/sym14081516
APA StyleBliyeva, D., Baigereyev, D., & Imomnazarov, K. (2022). Computer Simulation of the Seismic Wave Propagation in Poroelastic Medium. Symmetry, 14(8), 1516. https://doi.org/10.3390/sym14081516