
Lie Group Classification of Generalized Variable Coefficient Korteweg-de Vries Equation with Dual Power-Law Nonlinearities with Linear Damping and Dispersion in Quantum Field Theory



Abstract
:1. Introduction
Mathematical Analysis
2. Lie Group Classification of (3) When
2.1. Equivalence Transformations
2.2. Case 1.
2.3. Case 2.
2.4. Principal Lie Algebra and Classifying Relations
2.4.1. Principal Lie Algebra of (3) with
2.4.2. Principal Lie Algebra of (3) with
2.5. Proper Lie Group Classifications of Functions
2.5.1. Lie Group Classification of (3),
2.5.2. Lie Group Classification of (3),
2.6. Symmetry Reductions and Group-Invariant Solutions
2.7. Exact Solutions of (21) Using F-Expansion Technique
3. Lie Group Classification of (3) When
Travelling Wave Reductions
4. Observations and Discussion of Results
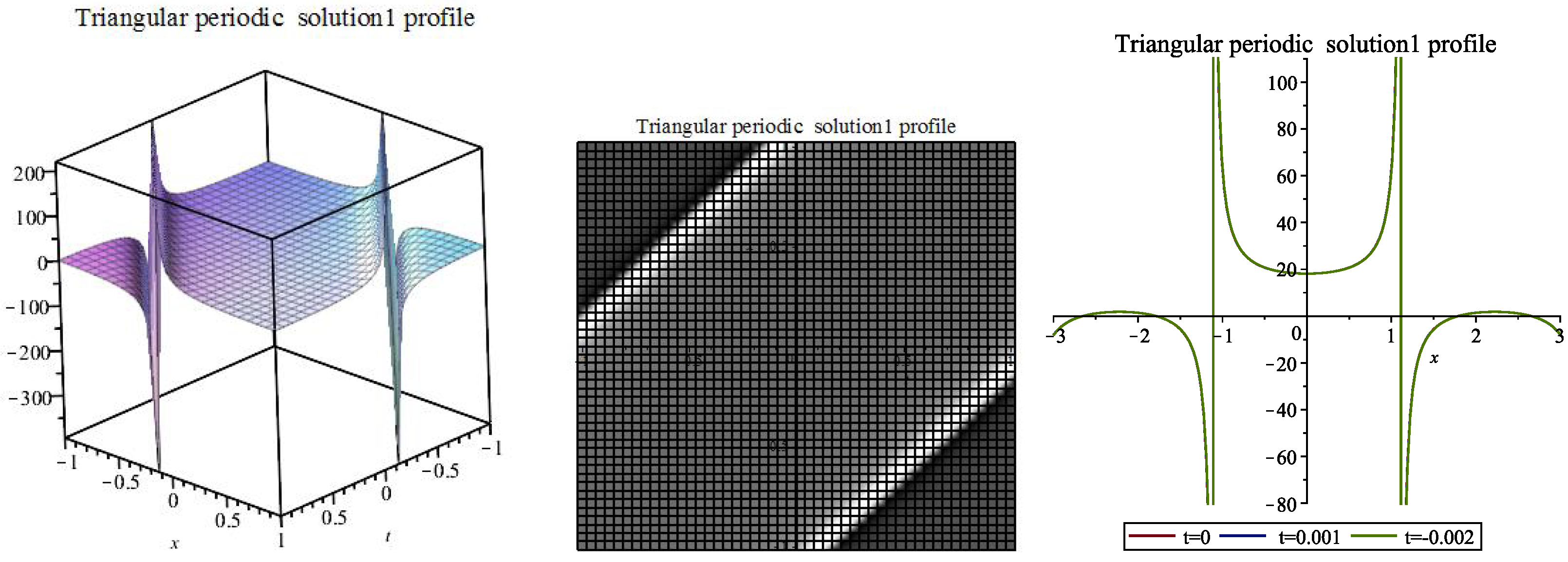
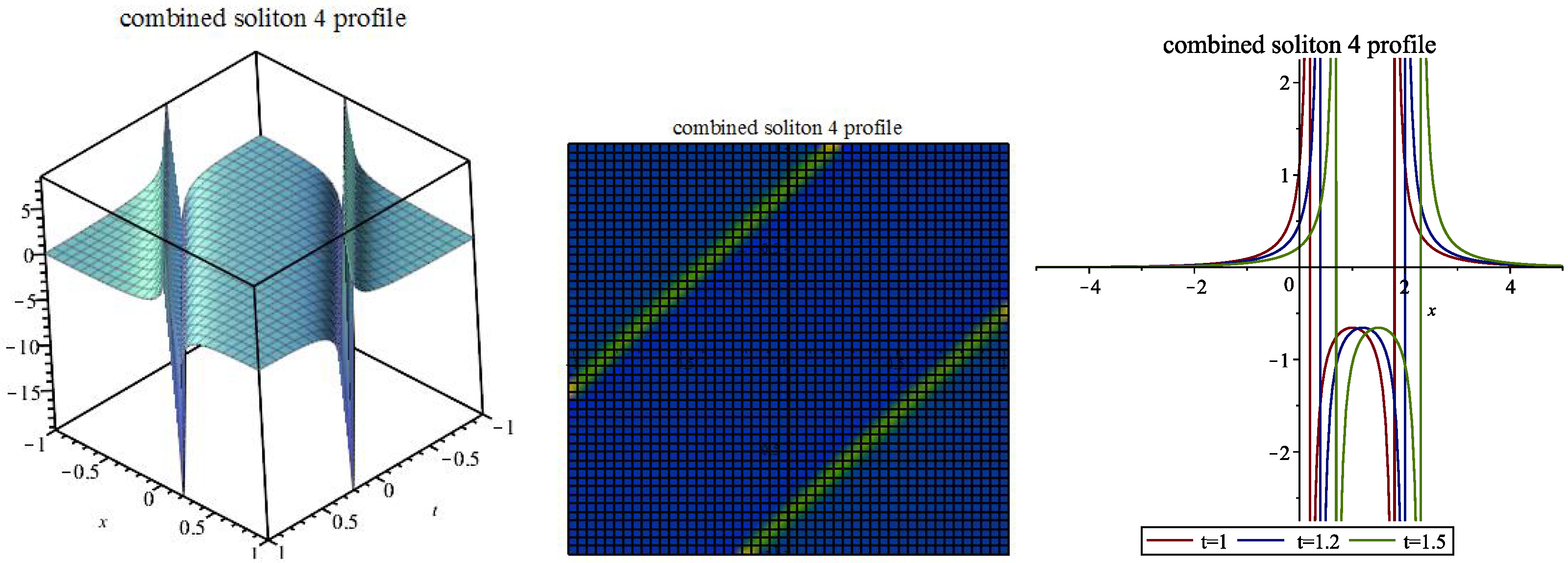
5. Analysis of Solutions and Graphical Depictions
Solitons and Classical Solutions in Quantum Field Theory
6. Synopsis of Conservation Laws for (3)
6.1. Conserved Currents of Equation (3) When
6.1.1. Application of Direct Technique
6.1.2. Conserved Currents of (21)
6.2. Conserved Currents of Equation (3) When
Conserved Currents of (3) via Homotopy Formula
6.3. Application of Noether’s Theorem
6.3.1. Noether Conserved Currents of (3) When ,
6.3.2. Noether Conserved Currents of (3) When ,
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zabusky, N.J.; Kruskal, M.D. Interaction of solitons in a collisionless plasma and recurrence of initial states. Phys. Rev. Lett. 1965, 15, 240. [Google Scholar] [CrossRef] [Green Version]
- Gao, X.Y. Mathematical view with observational/experimental consideration on certain (2+1)-dimensional waves in the cosmic/laboratory dusty plasmas. Appl. Math. Lett. 2019, 91, 165–172. [Google Scholar] [CrossRef]
- Khalique, C.M.; Adeyemo, O.D. A study of (3+1)-dimensional generalized Korteweg-de Vries-Zakharov-Kuznetsov equation via Lie symmetry approach. Results Phys. 2020, 18, 103197. [Google Scholar] [CrossRef]
- Du, X.X.; Tian, B.; Qu, Q.X.; Yuan, Y.Q.; Zhao, X.H. Lie group analysis, solitons, self-adjointness and conservation laws of the modified Zakharov-Kuznetsov equation in an electron-positron-ion magnetoplasma. Chaos Solitons Fract. 2020, 134, 109709. [Google Scholar] [CrossRef]
- Zhang, C.R.; Tian, B.; Qu, Q.X.; Liu, L.; Tian, H.Y. Vector bright solitons and their interactions of the couple Fokas–Lenells system in a birefringent optical fiber. Z. Angew. Math. Phys. 2020, 71, 1–19. [Google Scholar] [CrossRef]
- Gao, X.Y.; Guo, Y.J.; Shan, W.R. Water-wave symbolic computation for the Earth, Enceladus and Titan: The higher-order Boussinesq-Burgers system, auto-and non-auto-Bäcklund transformations. Appl. Math. Lett. 2020, 104, 106170. [Google Scholar] [CrossRef]
- Zhou, Y.; Fan, F.; Liu, Q. Bounded and unbounded traveling wave solutions of the (3+1)-dimensional Jimbo-Miwa equation. Results Phys. 2019, 12, 1149–1157. [Google Scholar] [CrossRef]
- Khawajaa, U.A.; Eleuchb, H.; Bahloulid, H. Analytical analysis of soliton propagation in microcavity wires. Results Phys. 2019, 12, 471–474. [Google Scholar] [CrossRef]
- Shqair, M. Solution of different geometries reflected reactors neutron diffusion equation using the homotopy perturbation method. Results Phys. 2019, 12, 61–66. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Exact soliton and kink solutions for new (3+1)-dimensional nonlinear modified equations of wave propagation. Open Eng. 2017, 7, 169–174. [Google Scholar] [CrossRef]
- Olver, P.J. Equivalence, Invariants Furthermore, Symmetry; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Ovsiannikov, L.V. Group Analysis of Differential Equations; Academic Press: New York, NY, USA, 1982. [Google Scholar]
- Bluman, G.W.; Kumei, S. Symmetries and Differential Equations; Springer: Berlin/Heidelberg, Germany, 1989. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Ibragimov, N.H. CRC Handbook of Lie Group Analysis of Differential Equations; CRC Press: Boca Raton, FL, USA, 1996; Volume 1–3. [Google Scholar]
- Ibragimov, N.H. Elementary Lie Group Analysis and Ordinary Differential Equations; John Wiley & Sons: Chichester, NY, USA, 1999. [Google Scholar]
- Khalique, C.M.; Adeyemo, O.D. Closed-form solutions and conserved vectors of a generalized (3+1)-dimensional breaking soliton equation of engineering and nonlinear science. Mathematics 2020, 8, 1692. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Clarkson, P.A. Solitons, Nonlinear Evolution Equations and Inverse Scattering; Cambridge University Press: Cambridge, UK, 1991. [Google Scholar]
- Hafez, M.G.; Kauser, M.; Akter, M.T. Some new exact travelling wave solutions for the Zhiber-Shabat equation. J. Math. Comput. Sci. 2014, 4, 2582–2593. [Google Scholar]
- Akbar, M.A.; Ali, N.H.M. Solitary wave solutions of the fourth-order Boussinesq equation through the exp(−Φ(η))-expansion method. SpringerPlus 2014, 3, 344. [Google Scholar] [CrossRef] [Green Version]
- Weiss, J.; Tabor, M.; Carnevale, G. The Painlevé property and a partial differential equations with an essential singularity. Phys. Lett. A 1985, 109, 205–208. [Google Scholar]
- Salas, A.H.; Gomez, C.A. Application of the Cole-Hopf transformation for finding exact solutions to several forms of the seventh-order KdV equation. Math. Probl. Eng. 2010, 2010, 194329. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Partial Differential Equations; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Chun, C.; Sakthivel, R. Homotopy perturbation technique for solving two point boundary value problems-comparison with other methods. Comput. Phys. Commun. 2010, 181, 1021–1024. [Google Scholar] [CrossRef]
- Zheng, C.L.; Fang, J.P. New exact solutions and fractional patterns of generalized Broer-Kaup system via a mapping approach. Chaos Soliton Fract. 2006, 27, 1321–1327. [Google Scholar] [CrossRef]
- Wen, X.Y. Construction of new exact rational form non-travelling wave solutions to the (2+1)dimensional generalized BroerKaup system. Appl. Math. Comput. 2010, 217, 1367–1375. [Google Scholar]
- Gu, C.H. Soliton Theory and Its Application; Zhejiang Science and Technology Press: Hangzhou, China, 1990. [Google Scholar]
- Zeng, X.; Wang, D.S. A generalized extended rational expansion method and its application to (1+1)-dimensional dispersive long wave equation. Appl. Math. Comput. 2009, 212, 296–304. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, M.; Wang, Y. Periodic wave solutions to a coupled KdV equations with variable coefficients. Phys. Lett. A 2003, 308, 31–36. [Google Scholar] [CrossRef]
- Jawad, A.J.M.; Mirzazadeh, M.; Biswas, A. Solitary wave solutions to nonlinear evolution equations in mathematical physics. Pramana 2014, 83, 457–471. [Google Scholar] [CrossRef]
- Kudryashov, N.A.; Loguinova, N.B. Extended simplest equation method for nonlinear differential equations. Appl. Math. Comput. 2008, 205, 396–402. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Zhang, L.; Khalique, C.M. Classification and bifurcation of a class of second-order ODEs and its application to nonlinear PDEs. Discret. Contin. Dyn. Syst. Ser. S 2018, 11, 777–790. [Google Scholar] [CrossRef]
- Zhang, W.; Chang, Q.; Jiang, B. Explicit exact solitary-wave solutions for compound KdV-type and compound KdV-Burgers-type equations with nonlinear terms of any order. Chaos Solitons Fract. 2002, 13, 311–319. [Google Scholar] [CrossRef]
- Dey, B. Domain wall solution of KdV like equation higher-order nonlinearity. J. Phys. A 1986, 19, 9–12. [Google Scholar] [CrossRef]
- Coffey, M.W. On series expansions giving closed-form solutions of Korteweg–de Vries-like equations. SIAM J. Appl. Math. 1990, 50, 1580–1592. [Google Scholar] [CrossRef]
- Urbain, F.; Kudryashov, N.A.; Tala-Tebue, E. Exact solutions of the KdV equation with dual-power law nonlinearity. Comput. Math. Math. Phys. 2021, 61, 431–435. [Google Scholar] [CrossRef]
- Chamazkoti, R.B.; Alipour, M. Lie symmetry classification and numerical analysis of KdV equation with power-law nonlinearity. arXiv 2014, arXiv:1405.0592. [Google Scholar]
- Biswas, A. Solitary wave solution for KdV equation with power-law nonlinearity and time-dependent coeffcients. Nonlinear Dyn. 2009, 58, 345–348. [Google Scholar] [CrossRef]
- Johnpillai, A.G.; Khalique, C.M.; Biswas, A. Exact solutions of the mKdV equation with time-dependent coefficients. Math. Commun. 2011, 16, 509–518. [Google Scholar]
- Gungor, F.; Lahno, V.I.; Zhdanov, R.Z. Symmetry classiffication of KdV-type nonlinear evolution equations. J. Math. Phys. 2004, 45, 2280–2313. [Google Scholar] [CrossRef] [Green Version]
- Vaneeva, O.; Kuriksha, O.; Sophocleous, C. Enhanced group classification of Gardner equations with time-dependent coefficients. Commun. Nonlinear. Sci. Numer. Simulat. 2015, 22, 1243–1251. [Google Scholar] [CrossRef] [Green Version]
- Rosa, R.D.L.; Bruzón, M.S. Differential invariants of a generelized variable coefficient Gardner equation. AIMS Discrete Continuous Dyn. Syst. Ser. S 2018, 11, 747–757. [Google Scholar]
- Rosa, M.; Bruzon, M.S.; Gandarias, M.L. Lie symmetries and conservation laws of a Fisher equation with nonlinear convection term. Discrete Continuous Dyn. Syst. Ser. S 2015, 8, 1331–1339. [Google Scholar] [CrossRef]
- Orhan, Ö.; Özer, T. On μ-symmetries, μ-reductions, and μ-conservation laws of Gardner equation. J. Nonlinear Math. Phys.J. Nonlinear Math. Phys. 2019, 26, 69–90. [Google Scholar] [CrossRef]
- Rosa, R.D.L.; Gandarias, M.L.; Bruzón, M.S. Symmetries and conservation laws of a fifth-order KdV equation with time-dependent coefficients and linear damping. Nonlinear Dyn. 2016, 84, 135–141. [Google Scholar] [CrossRef]
- Zhang, L.H. Travelling wave solutions for the generalized Zakharov-Kuznetsov equation with higher-order nonlinear terms. Appl. Math. Comput. 2009, 208, 144–155. [Google Scholar] [CrossRef]
- Belobo, D.B.; Das, T. Solitary and Jacobi elliptic wave solutions of the generalized Benjamin-Bona-Mahony equation. Commun. Nonlinear Sci. Numer. Simul. 2017, 48, 270–277. [Google Scholar] [CrossRef] [Green Version]
- Hydon, P. Symmetry Methods for Differential Equations; Springer: New York, NY, USA, 1989. [Google Scholar]
- Remoissenet, M. Waves Called Solitons: Concepts Furthermore, Experiments; Springer: Berlin, Germany, 2013. [Google Scholar]
- Weinberg, E.J. Classical solutions in quantum field theories. Annu. Rev. Nucl. Part. Sci. 1992, 42, 177–210. [Google Scholar] [CrossRef]
- Weinberg, E.J. Classical Solutions in Quantum Field Theory: Solitons and Instantons in High Energy Physics; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Weisstein, E.W. CRC Concise Encyclopedia of Mathematics; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Anco, S.C.; Bluman, G. Direct construction method for conservation laws of partial differential equations part 2. Eur. J. Appl. Math. 2002, 13, 567–585. [Google Scholar] [CrossRef] [Green Version]
- Noether, E. Invariante variationsprobleme. Nachr. v. d. Ges. d. Wiss. zu Göttingen 1918, 2, 235–257. [Google Scholar]
- Anco, S.C. Generalization of Noether’s Theorem in Modern Form to Non-variational Partial Differential Equations. In Recent Progress and Modern Challenges in Applied Mathematics, Modeling and Computational Science; Melnik, R., Makarov, R., Belair, J., Eds.; Fields Institute Communications; Springer: New York, NY, USA, 2017. [Google Scholar]
- Sarlet, W. Comment on ‘conservation laws of higher order nonlinear PDEs and the variational conservation laws in the class with mixed derivatives’. J. Phys. A Math. Theor. 2010, 43, 458001. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [] | ||||
|---|---|---|---|---|
| 0 | 0 | 0 | ||
| 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | ||
| 0 | 0 | 0 | 0 |
| [] | ||||
|---|---|---|---|---|
| 0 | 0 | 0 | ||
| 0 | 0 | 0 | ||
| 0 | 0 | |||
| 0 | 0 | 0 | 0 |
| [] | ||||
|---|---|---|---|---|
| 0 | 0 | 0 | ||
| 0 | 0 | 0 | ||
| 0 | 0 | |||
| 0 | 0 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adeyemo, O.D.; Khalique, C.M. Lie Group Classification of Generalized Variable Coefficient Korteweg-de Vries Equation with Dual Power-Law Nonlinearities with Linear Damping and Dispersion in Quantum Field Theory. Symmetry 2022, 14, 83. https://doi.org/10.3390/sym14010083
Adeyemo OD, Khalique CM. Lie Group Classification of Generalized Variable Coefficient Korteweg-de Vries Equation with Dual Power-Law Nonlinearities with Linear Damping and Dispersion in Quantum Field Theory. Symmetry. 2022; 14(1):83. https://doi.org/10.3390/sym14010083
Chicago/Turabian StyleAdeyemo, Oke Davies, and Chaudry Masood Khalique. 2022. "Lie Group Classification of Generalized Variable Coefficient Korteweg-de Vries Equation with Dual Power-Law Nonlinearities with Linear Damping and Dispersion in Quantum Field Theory" Symmetry 14, no. 1: 83. https://doi.org/10.3390/sym14010083
APA StyleAdeyemo, O. D., & Khalique, C. M. (2022). Lie Group Classification of Generalized Variable Coefficient Korteweg-de Vries Equation with Dual Power-Law Nonlinearities with Linear Damping and Dispersion in Quantum Field Theory. Symmetry, 14(1), 83. https://doi.org/10.3390/sym14010083