
Velocity-Free State Feedback Fault-Tolerant Control for Satellite with Actuator and Sensor Faults



Abstract
:1. Introduction
- (a)
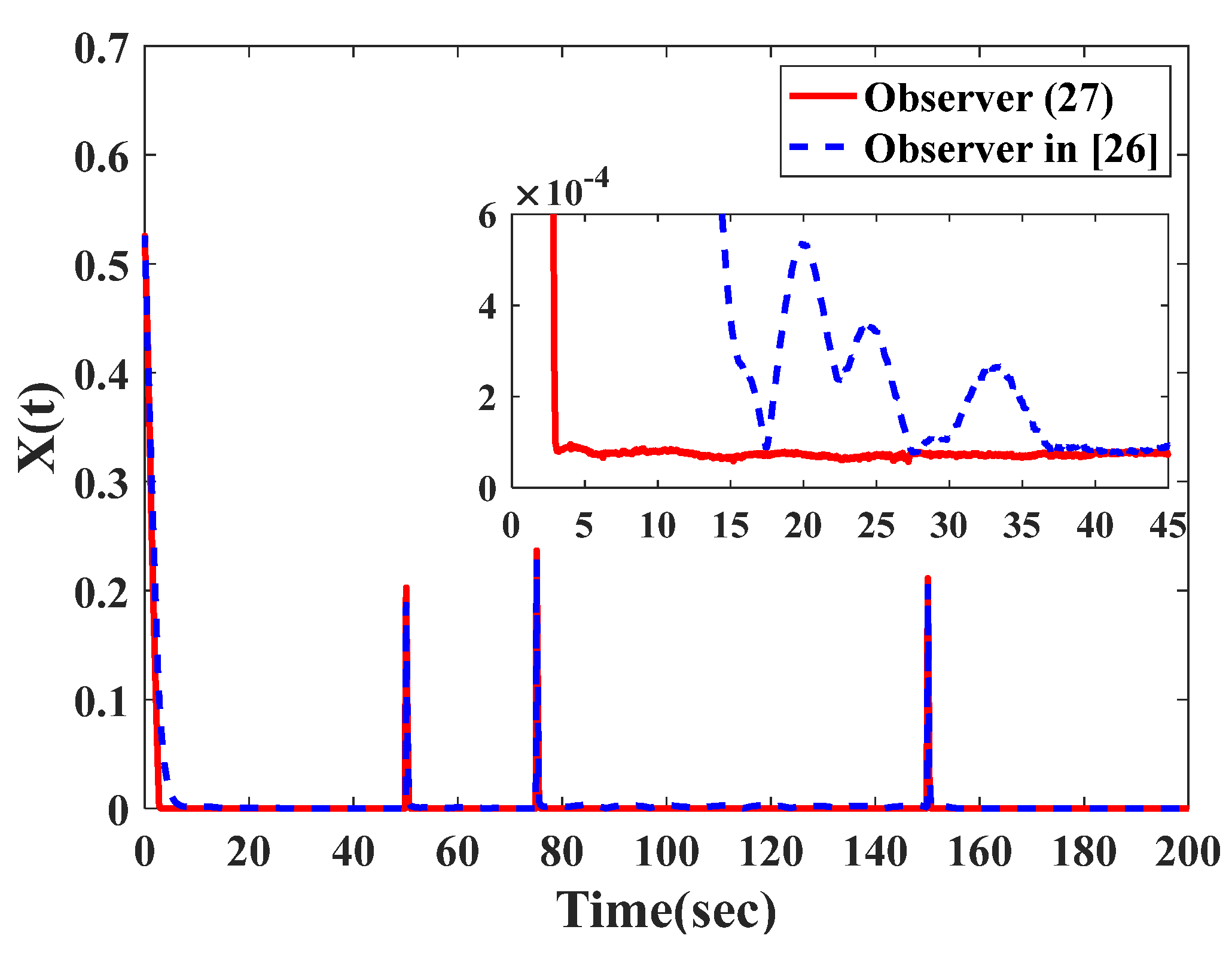
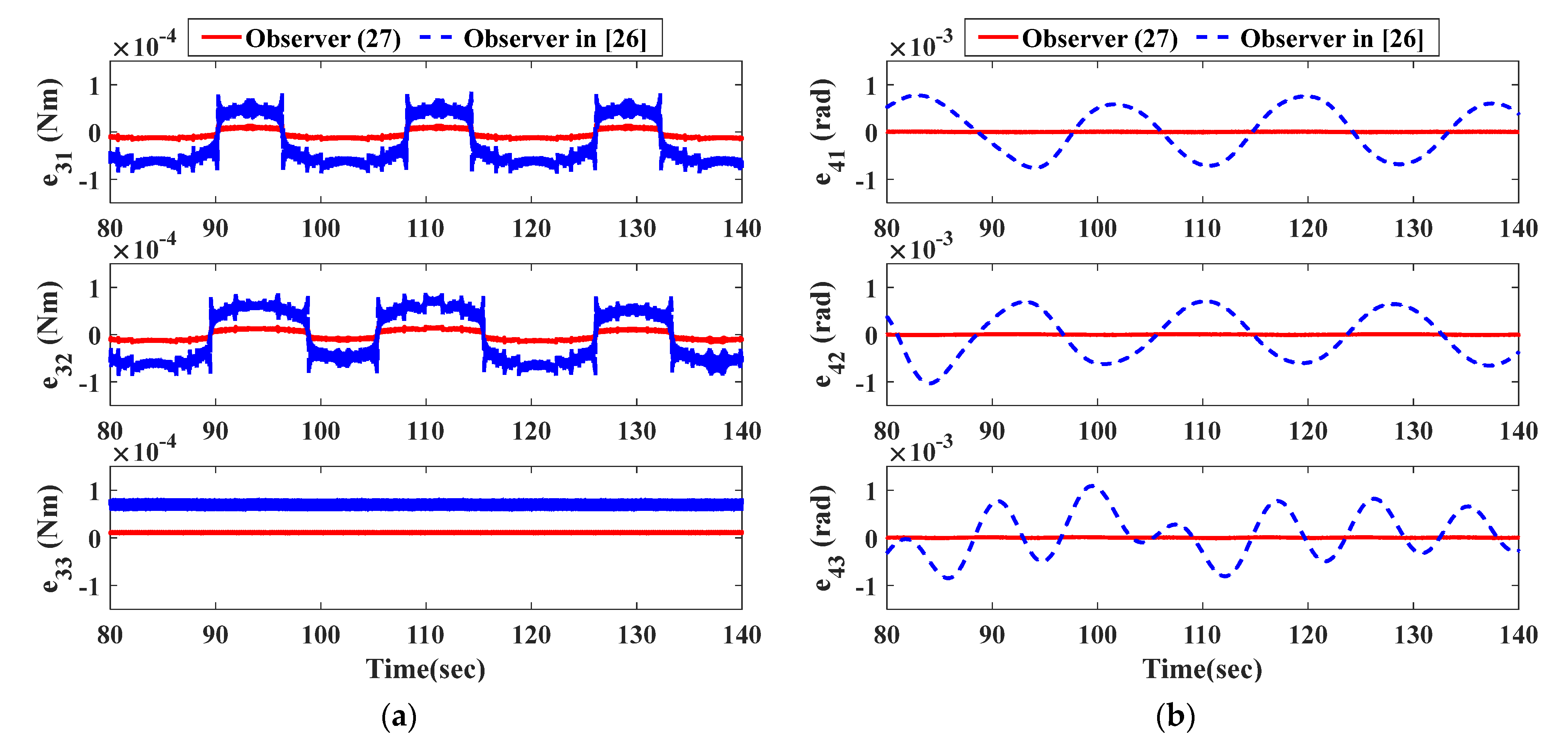
- An improved sliding mode observer is proposed to estimate system states and faults simultaneously. Compared with the observer in [26], the steady-state performance is improved.
- (b)
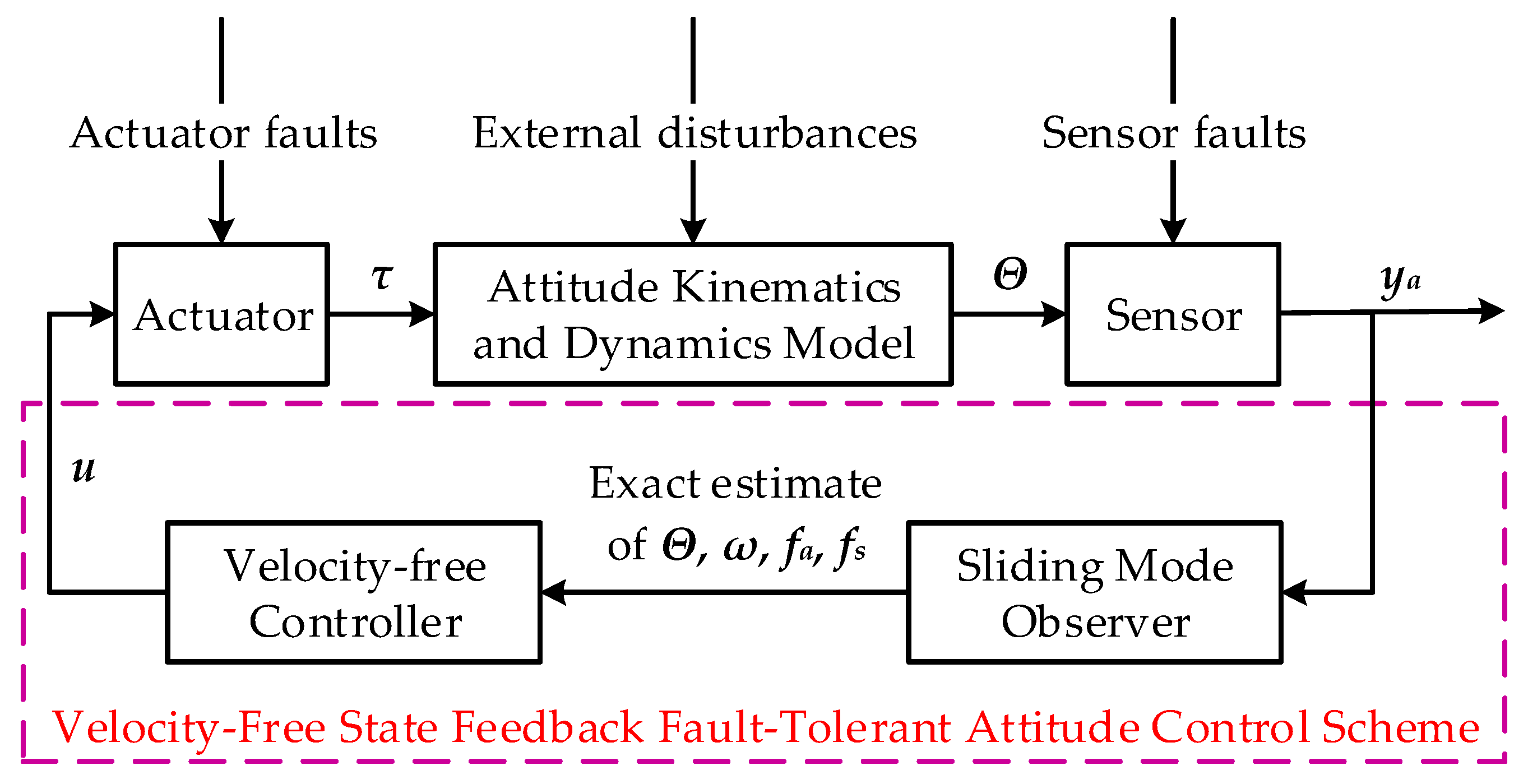
- The multiplicative faults and additive faults of actuator and sensor are considered. The designed scheme is able to tolerate the lumped faults. The controller presented has a strong fault-tolerance ability such that the closed-loop attitude system is asymptotically stable.
- (c)
- The proposed fault-tolerant control scheme does not require angular velocity measurements, which reduces satellite mass and the cost of airborne sensors.
2. Preliminaries
2.1. Notations and Lemmas
2.2. Satellite Attitude Dynamics Model
2.3. Faults Model
2.4. Problem Statement
3. Observer-Based State Feedback Attitude Controller Design
3.1. Improved Sliding Mode Observer Design
3.2. Velocity-Free State Feedback Fault-Tolerant Attitude Controller Design
4. Simulation Results
4.1. Observer-Based PD Controller Simulation
4.2. VSFTC Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lee, D.; Vukovich, G.; Gui, H.C. Adaptive variable-structure finite-time mode control for spacecraft proximity operations with actuator saturation. Adv. Space Res. 2017, 59, 2473–2487. [Google Scholar] [CrossRef]
- Hu, Q.; Ma, G. Adaptive variable structure controller for spacecraft vibration reduction. IEEE Trans. Aerosp. Electron. Syst. 2008, 44, 861–876. [Google Scholar]
- Roy, S.; Kar, I.N.; Lee, J.; Tsagarakis, N.G.; Caldwell, D.G. Adaptive-robust control of a class of EL systems with parametric variations using artificially delayed input and position feedback. IEEE Trans. Control Syst. Technol. 2019, 27, 603–615. [Google Scholar] [CrossRef] [Green Version]
- Li, J.F.; Wang, Y.B.; Liu, Z.Y.; Jing, X.; Hu, C.W. A new recursive composite adaptive controller for robot manipulators. Space Sci. Technol. 2021, 2021, 9801421. [Google Scholar] [CrossRef]
- Liu, F.S.; Jin, D.P. A high-efficient finite difference method for flexible manipulator with boundary feedback control. Space Sci. Technol. 2021, 2021, 9874563. [Google Scholar] [CrossRef]
- Xiao, B.; Cao, L.; Xu, S.; Liu, L. Robust tracking control of robot manipulators with joint velocity measurement uncertainty and actuator faults. IEEE/ASME Trans. Mechatron. 2020, 25, 1354–1465. [Google Scholar] [CrossRef]
- Wu, B.; Cao, X. Robust attitude tracking control for spacecraft with quantized torques. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1020–1028. [Google Scholar] [CrossRef]
- Zou, A.; Dev Kumar, K.; Hou, Z. Quaternion-based adaptive output feedback attitude control of spacecraft using chebyshev neural networks. IEEE Trans. Neural Netw. 2010, 21, 1457–1471. [Google Scholar]
- Ran, D.; De Ruiter AH, J.; Yao, W.; Chen, X. Distributed and reliable output feedback control of spacecraft formation with velocity constraints and time delays. IEEE/ASME Trans. Mechatron. 2019, 24, 2541–2549. [Google Scholar] [CrossRef]
- Roy, S.; Kar, I.N.; Lee, J. Toward position-only time-delayed control for uncertain Euler–Lagrange systems: Experiments on wheeled mobile robots. IEEE Robot. Autom. Lett. 2017, 2, 1925–1932. [Google Scholar] [CrossRef]
- Shi, X.; Zhou, Z.; Zhou, D. Finite-time attitude trajectory tracking control of rigid spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2913–2923. [Google Scholar] [CrossRef]
- Du, H.; Li, S.; Qian, C. Finite-time attitude tracking control of spacecraft with application to attitude synchronization. IEEE Trans. Autom. Control 2011, 56, 2711–2717. [Google Scholar] [CrossRef]
- Cao, L.; Xiao, B.; Golestani, M. Robust fixed-time attitude stabilization control of flexible spacecraft with actuator uncertainty. Nonlinear Dyn. 2020, 100, 2505–2519. [Google Scholar] [CrossRef]
- Robertson, B.; Stoneking, E. Satellite GN&C anomaly trends. In Proceedings of the Annual AAS Rocky Mountain Guidance and Control Conference, San Diego, CA, USA, 5–9 February 2003. [Google Scholar]
- Li, B.; Hu, Q.; Ma, G.; Yang, Y. Fault-tolerant attitude stabilization incorporating closed-loop control allocation under actuator failure. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1989–2000. [Google Scholar] [CrossRef]
- Gao, J.; Fu, Z.; Zhang, S. Adaptive fixed-time attitude tracking control for rigid spacecraft with actuator faults. IEEE Trans. Ind. Electron. 2019, 66, 7141–7149. [Google Scholar] [CrossRef]
- Mayhew, C.G.; Sanfelice, R.G.; Teel, A.R. Quaternion-based hybrid control for robust global attitude tracking. IEEE Trans. Autom. Control 2011, 56, 2555–2566. [Google Scholar] [CrossRef]
- Abdullah, A.; Zribi, M. Sensor-fault-tolerant control for a class of linear parameter varying systems with practical examples. IEEE Trans. Ind. Electron. 2013, 60, 5239–5251. [Google Scholar] [CrossRef]
- Xiao, B.; Hu, Q.; Wang, D.; Poh, E.K. Attitude tracking control of rigid spacecraft with actuator misalignment and fault. IEEE Trans. Control Syst. Technol. 2013, 21, 2360–2366. [Google Scholar] [CrossRef]
- Bustan, D.; Sani, S.H.; Pariz, N. Adaptive fault-tolerant spacecraft attitude control design with transient response control. IEEE/ASME Trans. Mechatron. 2014, 19, 1404–1411. [Google Scholar]
- Xiao, B.; Hu, Q.; Zhang, Y. Adaptive sliding mode fault tolerant attitude tracking control for flexible spacecraft under actuator saturation. IEEE Trans. Control Syst. Technol. 2012, 20, 1605–1612. [Google Scholar] [CrossRef]
- Talebi, H.A.; Khorasani, K.; Tafazoli, S. A recurrent neural-network-based sensor and actuator fault detection and isolation for nonlinear systems with application to the satellite’s attitude control subsystem. IEEE Trans. Neural Netw. 2009, 20, 45–60. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z. Fault estimation and fault-tolerant control for discrete-time dynamic systems. IEEE Trans. Ind. Electron. 2015, 62, 3874–3884. [Google Scholar] [CrossRef] [Green Version]
- Zhu, F.; Shen, Y.; Zhang, J.; Wang, F. Observer-based fault reconstructions and fault tolerant control designs for uncertain switched systems with both actuator and sensor faults. IET Control Theory Appl. 2020, 14, 2017–2029. [Google Scholar] [CrossRef]
- Lee, T.H.; Lim, C.P.; Nahavandi, S.; Roberts, R.G. Observer-based H-infinity fault-tolerant control for linear systems with sensor and actuator faults. IEEE Syst. J. 2019, 13, 1981–1990. [Google Scholar] [CrossRef]
- Yang, H.; Yin, S. Reduced-order sliding-mode-observer-based fault estimation for markov jump systems. IEEE Trans. Autom. Control 2019, 64, 4733–4740. [Google Scholar] [CrossRef]
- Kruk, J.W.; Class, B.F.; Rovner, D.; Westphal, J.; Ake, T.B.; Moos, H.W.; Roberts, B.; Fisher, L. FUSE in-orbit attitude control with two reaction wheels and no gyroscopes. In Proceedings of the SPIE—The International Society for Optical Engineering, Bellingham, WA, USA, 24 February 2003. [Google Scholar]
- Tayebi, A.; Roberts, A.; Benallegue, A. Inertial vector measurements based velocity-free attitude stabilization. IEEE Trans. Autom. Control 2013, 58, 2893–2898. [Google Scholar] [CrossRef]
- Hu, Q.; Jiang, B. Continuous finite-time attitude control for rigid spacecraft based on angular velocity observer. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1082–1092. [Google Scholar] [CrossRef]
- Du, H.; Li, S. Semi-global finite-time attitude stabilization by output feedback for a rigid spacecraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 227, 1881–1891. [Google Scholar] [CrossRef]
- Peng, X.; Geng, Z.; Sun, J. The specified finite-time distributed observers-based velocity-free attitude synchronization for rigid bodies on SO(3). IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 1610–1621. [Google Scholar] [CrossRef]
- Cui, B.; Xia, Y.; Liu, K.; Wang, Y.; Zhai, D. Velocity-observer-based distributed finite-time attitude tracking control for multiple uncertain rigid spacecraft. IEEE Trans. Ind. Inform. 2020, 16, 2509–2519. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef] [Green Version]
- Zou, A.; Fan, Z. Fixed-time attitude tracking control for rigid spacecraft without angular velocity measurements. IEEE Trans. Ind. Electron. 2020, 67, 6795–6805. [Google Scholar] [CrossRef]
- Xiao, B.; Huo, M.; Yang, X.; Zhang, Y. Fault-tolerant attitude stabilization for satellites without rate sensor. IEEE Trans. Ind. Electron. 2015, 62, 7191–7202. [Google Scholar] [CrossRef]
- Wang, X.; Tan, C.P.; Wu, F.; Wang, J. Fault-tolerant attitude control for rigid spacecraft without angular velocity measurements. IEEE Trans. Cybern. 2021, 51, 1216–1229. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Zhang, A.; Xiao, B. Velocity-Free State Feedback Fault-Tolerant Control for Satellite with Actuator and Sensor Faults. Symmetry 2022, 14, 157. https://doi.org/10.3390/sym14010157
Liu M, Zhang A, Xiao B. Velocity-Free State Feedback Fault-Tolerant Control for Satellite with Actuator and Sensor Faults. Symmetry. 2022; 14(1):157. https://doi.org/10.3390/sym14010157
Chicago/Turabian StyleLiu, Mingjun, Aihua Zhang, and Bing Xiao. 2022. "Velocity-Free State Feedback Fault-Tolerant Control for Satellite with Actuator and Sensor Faults" Symmetry 14, no. 1: 157. https://doi.org/10.3390/sym14010157
APA StyleLiu, M., Zhang, A., & Xiao, B. (2022). Velocity-Free State Feedback Fault-Tolerant Control for Satellite with Actuator and Sensor Faults. Symmetry, 14(1), 157. https://doi.org/10.3390/sym14010157