
An Efficient Shortest Path Algorithm: Multi-Destinations in an Indoor Environment

 ,
,  ,
, 
Abstract
1. Introduction
2. Related Work
3. Algorithms
3.1. Algorithm: CDSSSD
| Algorithm 1 Input: Graph: G (V, E, W), source node: S, set of multiple destination nodes: T Output: Paths from source to destination nodes |
|
3.2. Algorithm: MDMSMD
| Algorithm 2 Input: Graph: G (V, E, W), source node: S, set of multiple destination nodes: T Output: A path from source to destination nodes and shortest path among destination nodes |
|
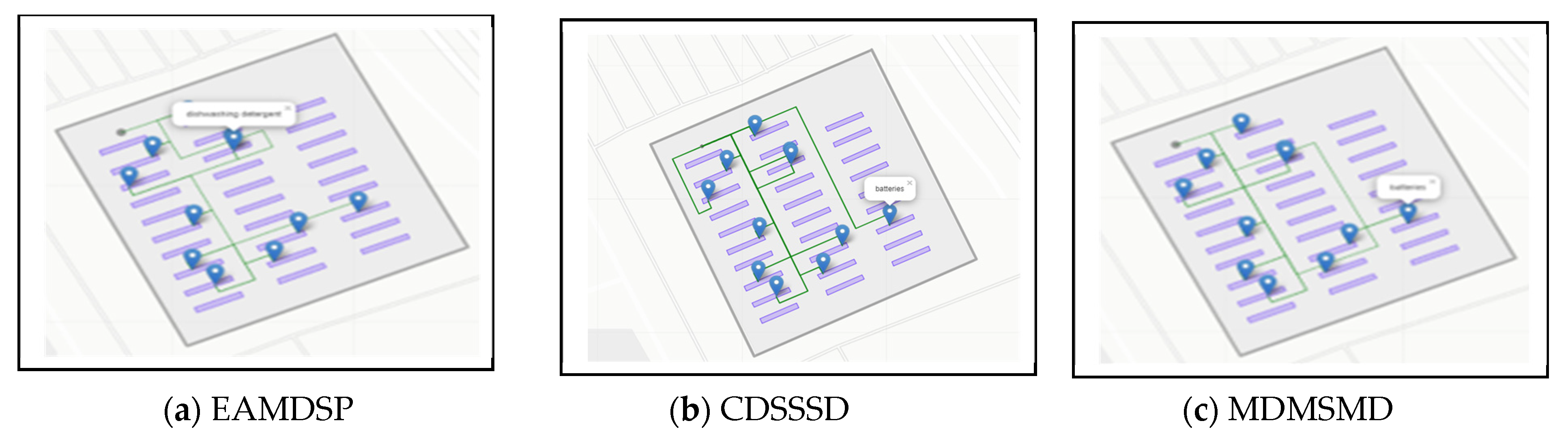
3.3. The Proposed EAMDSP
| Algorithm 3. Raised algorithm: EAMDSP |
| Input: Graph: G (V, E, W), source node: S, set of multiple destination nodes: T Output: A path from source to destination nodes and shortest path among destination nodes
|
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Result Detail Data Tables

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SL No. | Visited Node | Longitude | Latitude | Source Node | Destination Node | Weight | Item Name | |
|---|---|---|---|---|---|---|---|---|
| 1 | 342 | 102.27257 | 2.2528471 | 342 | 384 | 0 | 1st source | |
| 2 | 208 | 102.27257 | 2.252859 | 342 | 384 | 2 | ||
| 3 | 209 | 102.27257 | 2.2528595 | 342 | 384 | 1 | ||
| 4 | 210 | 102.27257 | 2.2528599 | 342 | 384 | 1 | ||
| 5 | 211 | 102.27256 | 2.2528603 | 342 | 384 | 1 | ||
| 6 | 212 | 102.27256 | 2.2528607 | 342 | 384 | 1 | ||
| 7 | 213 | 102.27256 | 2.2528615 | 342 | 384 | 1 | ||
| 8 | 214 | 102.27256 | 2.2528757 | 342 | 384 | 2 | ||
| 9 | 215 | 102.27256 | 2.2528774 | 342 | 384 | 1 | ||
| 10 | 232 | 102.27256 | 2.2528798 | 342 | 384 | 1 | ||
| 11 | 384 | 102.27256 | 2.2528801 | 342 | 384 | 1 | Bumper | 1st destination |
| 12 | 232 | 102.27256 | 2.2528798 | 384 | 472 | 1 | ||
| 13 | 233 | 102.27256 | 2.2528833 | 384 | 472 | 1 | ||
| 14 | 234 | 102.27256 | 2.2528868 | 384 | 472 | 1 | ||
| 15 | 235 | 102.27256 | 2.2528903 | 384 | 472 | 1 | ||
| 16 | 236 | 102.27256 | 2.2528911 | 384 | 472 | 1 | ||
| 17 | 253 | 102.27256 | 2.2528938 | 384 | 472 | 1 | ||
| 18 | 254 | 102.27256 | 2.2528971 | 384 | 472 | 1 | ||
| 19 | 255 | 102.27256 | 2.2529008 | 384 | 472 | 1 | ||
| 20 | 256 | 102.27256 | 2.2529042 | 384 | 472 | 1 | ||
| 21 | 257 | 102.27256 | 2.2529051 | 384 | 472 | 1 | ||
| 22 | 274 | 102.27256 | 2.2529077 | 384 | 472 | 1 | ||
| 23 | 275 | 102.27256 | 2.2529111 | 384 | 472 | 1 | ||
| 24 | 276 | 102.27256 | 2.2529148 | 384 | 472 | 1 | ||
| 25 | 277 | 102.27257 | 2.2529182 | 384 | 472 | 1 | ||
| 26 | 278 | 102.27257 | 2.2529192 | 384 | 472 | 1 | ||
| 27 | 295 | 102.27257 | 2.2529217 | 384 | 472 | 1 | ||
| 28 | 296 | 102.27257 | 2.2529252 | 384 | 472 | 1 | ||
| 29 | 297 | 102.27257 | 2.2529287 | 384 | 472 | 1 | ||
| 30 | 298 | 102.27257 | 2.2529323 | 384 | 472 | 1 | ||
| 31 | 299 | 102.27257 | 2.2529332 | 384 | 472 | 1 | ||
| 32 | 300 | 102.27257 | 2.2529328 | 384 | 472 | 1 | ||
| 33 | 301 | 102.27258 | 2.2529326 | 384 | 472 | 1 | ||
| 34 | 472 | 102.27258 | 2.252928 | 384 | 472 | 1 | Antenna cable | 2nd destination |
| 35 | 301 | 102.27258 | 2.2529326 | 472 | 683 | 1 | ||
| 36 | 302 | 102.27258 | 2.2529323 | 472 | 683 | 1 | ||
| 37 | 303 | 102.27258 | 2.252932 | 472 | 683 | 1 | ||
| 38 | 304 | 102.27259 | 2.2529318 | 472 | 683 | 1 | ||
| 39 | 305 | 102.27259 | 2.2529315 | 472 | 683 | 1 | ||
| 40 | 306 | 102.27259 | 2.2529314 | 472 | 683 | 1 | ||
| 41 | 307 | 102.2726 | 2.2529311 | 472 | 683 | 1 | ||
| 42 | 308 | 102.2726 | 2.2529308 | 472 | 683 | 1 | ||
| 43 | 309 | 102.2726 | 2.2529306 | 472 | 683 | 1 | ||
| 44 | 310 | 102.2726 | 2.2529303 | 472 | 683 | 1 | ||
| 45 | 311 | 102.27261 | 2.2529301 | 472 | 683 | 1 | ||
| 46 | 312 | 102.27261 | 2.2529298 | 472 | 683 | 1 | ||
| 47 | 313 | 102.27261 | 2.2529295 | 472 | 683 | 1 | ||
| 48 | 314 | 102.27262 | 2.2529293 | 472 | 683 | 1 | ||
| 49 | 315 | 102.27262 | 2.2529291 | 472 | 683 | 1 | ||
| 50 | 186 | 102.27262 | 2.2529285 | 472 | 683 | 1 | ||
| 51 | 185 | 102.27262 | 2.252931 | 472 | 683 | 1 | ||
| 52 | 184 | 102.27263 | 2.2529348 | 472 | 683 | 1 | ||
| 53 | 183 | 102.27263 | 2.2529386 | 472 | 683 | 1 | ||
| 54 | 182 | 102.27263 | 2.2529423 | 472 | 683 | 1 | ||
| 55 | 181 | 102.27263 | 2.2529435 | 472 | 683 | 1 | ||
| 56 | 180 | 102.27263 | 2.252946 | 472 | 683 | 1 | ||
| 57 | 179 | 102.27263 | 2.2529495 | 472 | 683 | 1 | ||
| 58 | 178 | 102.27263 | 2.2529534 | 472 | 683 | 1 | ||
| 59 | 22 | 102.27263 | 2.2529585 | 472 | 683 | 1 | ||
| 60 | 23 | 102.27265 | 2.2529578 | 472 | 683 | 1 | ||
| 61 | 24 | 102.27266 | 2.2529569 | 472 | 683 | 2 | ||
| 62 | 25 | 102.27266 | 2.2529567 | 472 | 683 | 1 | ||
| 63 | 26 | 102.27267 | 2.2529567 | 472 | 683 | 1 | ||
| 64 | 27 | 102.27267 | 2.2529564 | 472 | 683 | 1 | ||
| 65 | 28 | 102.27267 | 2.2529563 | 472 | 683 | 1 | ||
| 66 | 29 | 102.27268 | 2.2529562 | 472 | 683 | 1 | ||
| 67 | 30 | 102.27268 | 2.2529559 | 472 | 683 | 1 | ||
| 68 | 31 | 102.27268 | 2.2529558 | 472 | 683 | 1 | ||
| 69 | 32 | 102.27269 | 2.2529557 | 472 | 683 | 1 | ||
| 70 | 33 | 102.27269 | 2.2529554 | 472 | 683 | 1 | ||
| 71 | 683 | 102.27269 | 2.2529501 | 472 | 683 | 1 | Bucket seat | 3rd destination |
| 72 | 33 | 102.27269 | 2.2529554 | 683 | 713 | 1 | ||
| 73 | 32 | 102.27269 | 2.2529557 | 683 | 713 | 1 | ||
| 74 | 31 | 102.27268 | 2.2529558 | 683 | 713 | 1 | ||
| 75 | 30 | 102.27268 | 2.2529559 | 683 | 713 | 1 | ||
| 76 | 29 | 102.27268 | 2.2529562 | 683 | 713 | 1 | ||
| 77 | 28 | 102.27267 | 2.2529563 | 683 | 713 | 1 | ||
| 78 | 27 | 102.27267 | 2.2529564 | 683 | 713 | 1 | ||
| 79 | 26 | 102.27267 | 2.2529567 | 683 | 713 | 1 | ||
| 80 | 25 | 102.27266 | 2.2529567 | 683 | 713 | 1 | ||
| 81 | 24 | 102.27266 | 2.2529569 | 683 | 713 | 1 | ||
| 82 | 164 | 102.27266 | 2.2529515 | 683 | 713 | 1 | ||
| 83 | 163 | 102.27266 | 2.2529477 | 683 | 713 | 1 | ||
| 84 | 162 | 102.27266 | 2.252944 | 683 | 713 | 1 | ||
| 85 | 145 | 102.27266 | 2.2529414 | 683 | 713 | 1 | ||
| 86 | 146 | 102.27266 | 2.2529411 | 683 | 713 | 1 | ||
| 87 | 147 | 102.27267 | 2.2529409 | 683 | 713 | 1 | ||
| 88 | 148 | 102.27267 | 2.2529407 | 683 | 713 | 1 | ||
| 89 | 149 | 102.27267 | 2.2529405 | 683 | 713 | 1 | ||
| 90 | 150 | 102.27267 | 2.2529404 | 683 | 713 | 1 | ||
| 91 | 151 | 102.27268 | 2.2529402 | 683 | 713 | 1 | ||
| 92 | 152 | 102.27268 | 2.25294 | 683 | 713 | 1 | ||
| 93 | 713 | 102.27268 | 2.2529351 | 683 | 713 | 1 | Adjusting mechanism (adjuster star wheel) | 4th destination |
| SL No. | Visited Node | Longitude | Latitude | Source Node | Destination Node | Weight | Item Name |
|---|---|---|---|---|---|---|---|
| 1 | 342 | 102.27257 | 2.2528471 | 342 | 472 | 0 | |
| 2 | 208 | 102.27257 | 2.252859 | 342 | 472 | 2 | |
| 3 | 209 | 102.27257 | 2.2528595 | 342 | 472 | 1 | |
| 4 | 210 | 102.27257 | 2.2528599 | 342 | 472 | 1 | |
| 5 | 211 | 102.27256 | 2.2528603 | 342 | 472 | 1 | |
| 6 | 212 | 102.27256 | 2.2528607 | 342 | 472 | 1 | |
| 7 | 213 | 102.27256 | 2.2528615 | 342 | 472 | 1 | |
| 8 | 214 | 102.27256 | 2.2528757 | 342 | 472 | 2 | |
| 9 | 215 | 102.27256 | 2.2528774 | 342 | 472 | 1 | |
| 10 | 232 | 102.27256 | 2.2528798 | 342 | 472 | 1 | |
| 11 | 233 | 102.27256 | 2.2528833 | 342 | 472 | 1 | |
| 12 | 234 | 102.27256 | 2.2528868 | 342 | 472 | 1 | |
| 13 | 235 | 102.27256 | 2.2528903 | 342 | 472 | 1 | |
| 14 | 236 | 102.27256 | 2.2528911 | 342 | 472 | 1 | |
| 15 | 253 | 102.27256 | 2.2528938 | 342 | 472 | 1 | |
| 16 | 254 | 102.27256 | 2.2528971 | 342 | 472 | 1 | |
| 17 | 255 | 102.27256 | 2.2529008 | 342 | 472 | 1 | |
| 18 | 256 | 102.27256 | 2.2529042 | 342 | 472 | 1 | |
| 19 | 257 | 102.27256 | 2.2529051 | 342 | 472 | 1 | |
| 20 | 274 | 102.27256 | 2.2529077 | 342 | 472 | 1 | |
| 21 | 275 | 102.27256 | 2.2529111 | 342 | 472 | 1 | |
| 22 | 276 | 102.27256 | 2.2529148 | 342 | 472 | 1 | |
| 23 | 277 | 102.27257 | 2.2529182 | 342 | 472 | 1 | |
| 24 | 278 | 102.27257 | 2.2529192 | 342 | 472 | 1 | |
| 25 | 295 | 102.27257 | 2.2529217 | 342 | 472 | 1 | |
| 26 | 296 | 102.27257 | 2.2529252 | 342 | 472 | 1 | |
| 27 | 297 | 102.27257 | 2.2529287 | 342 | 472 | 1 | |
| 28 | 298 | 102.27257 | 2.2529323 | 342 | 472 | 1 | |
| 29 | 299 | 102.27257 | 2.2529332 | 342 | 472 | 1 | |
| 30 | 300 | 102.27257 | 2.2529328 | 342 | 472 | 1 | |
| 31 | 301 | 102.27258 | 2.2529326 | 342 | 472 | 1 | |
| 32 | 472 | 102.27258 | 2.252928 | 342 | 472 | 1 | Antenna cable |
| 33 | 342 | 102.27257 | 2.2528471 | 342 | 384 | 0 | |
| 34 | 208 | 102.27257 | 2.252859 | 342 | 384 | 2 | |
| 35 | 209 | 102.27257 | 2.2528595 | 342 | 384 | 1 | |
| 36 | 210 | 102.27257 | 2.2528599 | 342 | 384 | 1 | |
| 37 | 211 | 102.27256 | 2.2528603 | 342 | 384 | 1 | |
| 38 | 212 | 102.27256 | 2.2528607 | 342 | 384 | 1 | |
| 39 | 213 | 102.27256 | 2.2528615 | 342 | 384 | 1 | |
| 40 | 214 | 102.27256 | 2.2528757 | 342 | 384 | 2 | |
| 41 | 215 | 102.27256 | 2.2528774 | 342 | 384 | 1 | |
| 42 | 232 | 102.27256 | 2.2528798 | 342 | 384 | 1 | |
| 43 | 384 | 102.27256 | 2.2528801 | 342 | 384 | 1 | Bumper |
| 44 | 342 | 102.27257 | 2.2528471 | 342 | 713 | 0 | |
| 45 | 208 | 102.27257 | 2.252859 | 342 | 713 | 2 | |
| 46 | 207 | 102.27258 | 2.2528588 | 342 | 713 | 1 | |
| 47 | 206 | 102.27258 | 2.2528583 | 342 | 713 | 1 | |
| 48 | 205 | 102.27258 | 2.252858 | 342 | 713 | 1 | |
| 49 | 204 | 102.27259 | 2.2528575 | 342 | 713 | 1 | |
| 50 | 203 | 102.27259 | 2.2528572 | 342 | 713 | 1 | |
| 51 | 202 | 102.27259 | 2.2528567 | 342 | 713 | 1 | |
| 52 | 201 | 102.27259 | 2.2528565 | 342 | 713 | 1 | |
| 53 | 200 | 102.2726 | 2.252856 | 342 | 713 | 1 | |
| 54 | 199 | 102.2726 | 2.2528555 | 342 | 713 | 1 | |
| 55 | 198 | 102.2726 | 2.2528553 | 342 | 713 | 1 | |
| 56 | 197 | 102.27261 | 2.2528548 | 342 | 713 | 1 | |
| 57 | 196 | 102.27261 | 2.2528543 | 342 | 713 | 1 | |
| 58 | 195 | 102.27261 | 2.2528706 | 342 | 713 | 2 | |
| 59 | 194 | 102.27262 | 2.2528847 | 342 | 713 | 2 | |
| 60 | 193 | 102.27262 | 2.2528996 | 342 | 713 | 2 | |
| 61 | 192 | 102.27262 | 2.2529086 | 342 | 713 | 1 | |
| 62 | 166 | 102.27264 | 2.2529071 | 342 | 713 | 2 | |
| 63 | 165 | 102.27265 | 2.2529057 | 342 | 713 | 2 | |
| 64 | 119 | 102.27265 | 2.2529111 | 342 | 713 | 1 | |
| 65 | 120 | 102.27265 | 2.2529138 | 342 | 713 | 1 | |
| 66 | 121 | 102.27265 | 2.2529178 | 342 | 713 | 1 | |
| 67 | 122 | 102.27265 | 2.2529216 | 342 | 713 | 1 | |
| 68 | 123 | 102.27266 | 2.2529251 | 342 | 713 | 1 | |
| 69 | 124 | 102.27266 | 2.2529265 | 342 | 713 | 1 | |
| 70 | 141 | 102.27266 | 2.2529289 | 342 | 713 | 1 | |
| 71 | 142 | 102.27266 | 2.2529325 | 342 | 713 | 1 | |
| 72 | 143 | 102.27266 | 2.2529367 | 342 | 713 | 1 | |
| 73 | 144 | 102.27266 | 2.25294 | 342 | 713 | 1 | |
| 74 | 145 | 102.27266 | 2.2529414 | 342 | 713 | 1 | |
| 75 | 146 | 102.27266 | 2.2529411 | 342 | 713 | 1 | |
| 76 | 147 | 102.27267 | 2.2529409 | 342 | 713 | 1 | |
| 77 | 148 | 102.27267 | 2.2529407 | 342 | 713 | 1 | |
| 78 | 149 | 102.27267 | 2.2529405 | 342 | 713 | 1 | |
| 79 | 150 | 102.27267 | 2.2529404 | 342 | 713 | 1 | |
| 80 | 151 | 102.27268 | 2.2529402 | 342 | 713 | 1 | |
| 81 | 152 | 102.27268 | 2.25294 | 342 | 713 | 1 | |
| 82 | 713 | 102.27268 | 2.2529351 | 342 | 713 | 1 | Adjusting mechanism (adjuster star wheel) |
| 83 | 342 | 102.27257 | 2.2528471 | 342 | 683 | 0 | |
| 84 | 208 | 102.27257 | 2.252859 | 342 | 683 | 2 | |
| 85 | 207 | 102.27258 | 2.2528588 | 342 | 683 | 1 | |
| 86 | 206 | 102.27258 | 2.2528583 | 342 | 683 | 1 | |
| 87 | 205 | 102.27258 | 2.252858 | 342 | 683 | 1 | |
| 88 | 204 | 102.27259 | 2.2528575 | 342 | 683 | 1 | |
| 89 | 203 | 102.27259 | 2.2528572 | 342 | 683 | 1 | |
| 90 | 202 | 102.27259 | 2.2528567 | 342 | 683 | 1 | |
| 91 | 201 | 102.27259 | 2.2528565 | 342 | 683 | 1 | |
| 92 | 200 | 102.2726 | 2.252856 | 342 | 683 | 1 | |
| 93 | 199 | 102.2726 | 2.2528555 | 342 | 683 | 1 | |
| 94 | 198 | 102.2726 | 2.2528553 | 342 | 683 | 1 | |
| 95 | 197 | 102.27261 | 2.2528548 | 342 | 683 | 1 | |
| 96 | 196 | 102.27261 | 2.2528543 | 342 | 683 | 1 | |
| 97 | 195 | 102.27261 | 2.2528706 | 342 | 683 | 2 | |
| 98 | 194 | 102.27262 | 2.2528847 | 342 | 683 | 2 | |
| 99 | 193 | 102.27262 | 2.2528996 | 342 | 683 | 2 | |
| 100 | 192 | 102.27262 | 2.2529086 | 342 | 683 | 1 | |
| 101 | 166 | 102.27264 | 2.2529071 | 342 | 683 | 2 | |
| 102 | 167 | 102.27264 | 2.2529153 | 342 | 683 | 1 | |
| 103 | 168 | 102.27264 | 2.252919 | 342 | 683 | 1 | |
| 104 | 169 | 102.27264 | 2.2529226 | 342 | 683 | 1 | |
| 105 | 170 | 102.27264 | 2.2529264 | 342 | 683 | 1 | |
| 106 | 171 | 102.27264 | 2.2529298 | 342 | 683 | 1 | |
| 107 | 172 | 102.27264 | 2.2529338 | 342 | 683 | 1 | |
| 108 | 173 | 102.27264 | 2.2529376 | 342 | 683 | 1 | |
| 109 | 174 | 102.27264 | 2.2529413 | 342 | 683 | 1 | |
| 110 | 175 | 102.27264 | 2.2529451 | 342 | 683 | 1 | |
| 111 | 176 | 102.27264 | 2.2529486 | 342 | 683 | 1 | |
| 112 | 177 | 102.27264 | 2.2529524 | 342 | 683 | 1 | |
| 113 | 23 | 102.27265 | 2.2529578 | 342 | 683 | 1 | |
| 114 | 24 | 102.27266 | 2.2529569 | 342 | 683 | 2 | |
| 115 | 25 | 102.27266 | 2.2529567 | 342 | 683 | 1 | |
| 116 | 26 | 102.27267 | 2.2529567 | 342 | 683 | 1 | |
| 117 | 27 | 102.27267 | 2.2529564 | 342 | 683 | 1 | |
| 118 | 28 | 102.27267 | 2.2529563 | 342 | 683 | 1 | |
| 119 | 29 | 102.27268 | 2.2529562 | 342 | 683 | 1 | |
| 120 | 30 | 102.27268 | 2.2529559 | 342 | 683 | 1 | |
| 121 | 31 | 102.27268 | 2.2529558 | 342 | 683 | 1 | |
| 122 | 32 | 102.27269 | 2.2529557 | 342 | 683 | 1 | |
| 123 | 33 | 102.27269 | 2.2529554 | 342 | 683 | 1 | |
| 124 | 683 | 102.27269 | 2.2529501 | 342 | 683 | 1 | Bucket seat |
| SL No. | Visited Node | Longitude | Latitude | Source Node | Destination Node | Weight | Item Name | |
|---|---|---|---|---|---|---|---|---|
| 1 | 342 | 102.27257 | 2.2528471 | 342 | 472 | 0 | 1st source | |
| 2 | 208 | 102.27257 | 2.252859 | 342 | 472 | 2 | ||
| 3 | 209 | 102.27257 | 2.2528595 | 342 | 472 | 1 | ||
| 4 | 210 | 102.27257 | 2.2528599 | 342 | 472 | 1 | ||
| 5 | 211 | 102.27256 | 2.2528603 | 342 | 472 | 1 | ||
| 6 | 212 | 102.27256 | 2.2528607 | 342 | 472 | 1 | ||
| 7 | 213 | 102.27256 | 2.2528615 | 342 | 472 | 1 | ||
| 8 | 214 | 102.27256 | 2.2528757 | 342 | 472 | 2 | ||
| 9 | 215 | 102.27256 | 2.2528774 | 342 | 472 | 1 | ||
| 10 | 232 | 102.27256 | 2.2528798 | 342 | 472 | 1 | ||
| 11 | 233 | 102.27256 | 2.2528833 | 342 | 472 | 1 | ||
| 12 | 234 | 102.27256 | 2.2528868 | 342 | 472 | 1 | ||
| 13 | 235 | 102.27256 | 2.2528903 | 342 | 472 | 1 | ||
| 14 | 236 | 102.27256 | 2.2528911 | 342 | 472 | 1 | ||
| 15 | 253 | 102.27256 | 2.2528938 | 342 | 472 | 1 | ||
| 16 | 254 | 102.27256 | 2.2528971 | 342 | 472 | 1 | ||
| 17 | 255 | 102.27256 | 2.2529008 | 342 | 472 | 1 | ||
| 18 | 256 | 102.27256 | 2.2529042 | 342 | 472 | 1 | ||
| 19 | 257 | 102.27256 | 2.2529051 | 342 | 472 | 1 | ||
| 20 | 274 | 102.27256 | 2.2529077 | 342 | 472 | 1 | ||
| 21 | 275 | 102.27256 | 2.2529111 | 342 | 472 | 1 | ||
| 22 | 276 | 102.27256 | 2.2529148 | 342 | 472 | 1 | ||
| 23 | 277 | 102.27257 | 2.2529182 | 342 | 472 | 1 | ||
| 24 | 278 | 102.27257 | 2.2529192 | 342 | 472 | 1 | ||
| 25 | 295 | 102.27257 | 2.2529217 | 342 | 472 | 1 | ||
| 26 | 296 | 102.27257 | 2.2529252 | 342 | 472 | 1 | ||
| 27 | 297 | 102.27257 | 2.2529287 | 342 | 472 | 1 | ||
| 28 | 298 | 102.27257 | 2.2529323 | 342 | 472 | 1 | ||
| 29 | 299 | 102.27257 | 2.2529332 | 342 | 472 | 1 | ||
| 30 | 300 | 102.27257 | 2.2529328 | 342 | 472 | 1 | ||
| 31 | 301 | 102.27258 | 2.2529326 | 342 | 472 | 1 | ||
| 32 | 472 | 102.27258 | 2.252928 | 342 | 472 | 1 | Antenna cable | 1st destination |
| 33 | 301 | 102.27258 | 2.2529326 | 472 | 384 | 1 | ||
| 34 | 300 | 102.27257 | 2.2529328 | 472 | 384 | 1 | ||
| 35 | 299 | 102.27257 | 2.2529332 | 472 | 384 | 1 | ||
| 36 | 298 | 102.27257 | 2.2529323 | 472 | 384 | 1 | ||
| 37 | 297 | 102.27257 | 2.2529287 | 472 | 384 | 1 | ||
| 38 | 296 | 102.27257 | 2.2529252 | 472 | 384 | 1 | ||
| 39 | 295 | 102.27257 | 2.2529217 | 472 | 384 | 1 | ||
| 40 | 278 | 102.27257 | 2.2529192 | 472 | 384 | 1 | ||
| 41 | 277 | 102.27257 | 2.2529182 | 472 | 384 | 1 | ||
| 42 | 276 | 102.27256 | 2.2529148 | 472 | 384 | 1 | ||
| 43 | 275 | 102.27256 | 2.2529111 | 472 | 384 | 1 | ||
| 44 | 274 | 102.27256 | 2.2529077 | 472 | 384 | 1 | ||
| 45 | 257 | 102.27256 | 2.2529051 | 472 | 384 | 1 | ||
| 46 | 256 | 102.27256 | 2.2529042 | 472 | 384 | 1 | ||
| 47 | 255 | 102.27256 | 2.2529008 | 472 | 384 | 1 | ||
| 48 | 254 | 102.27256 | 2.2528971 | 472 | 384 | 1 | ||
| 49 | 253 | 102.27256 | 2.2528938 | 472 | 384 | 1 | ||
| 50 | 236 | 102.27256 | 2.2528911 | 472 | 384 | 1 | ||
| 51 | 235 | 102.27256 | 2.2528903 | 472 | 384 | 1 | ||
| 52 | 234 | 102.27256 | 2.2528868 | 472 | 384 | 1 | ||
| 53 | 233 | 102.27256 | 2.2528833 | 472 | 384 | 1 | ||
| 54 | 232 | 102.27256 | 2.2528798 | 472 | 384 | 1 | ||
| 55 | 384 | 102.27256 | 2.2528801 | 472 | 384 | 1 | Bumper | 2nd destination |
| 56 | 232 | 102.27256 | 2.2528798 | 384 | 713 | 1 | ||
| 57 | 215 | 102.27256 | 2.2528774 | 384 | 713 | 1 | ||
| 58 | 216 | 102.27256 | 2.2528767 | 384 | 713 | 1 | ||
| 59 | 217 | 102.27257 | 2.2528764 | 384 | 713 | 1 | ||
| 60 | 218 | 102.27257 | 2.2528761 | 384 | 713 | 1 | ||
| 61 | 219 | 102.27257 | 2.2528755 | 384 | 713 | 1 | ||
| 62 | 220 | 102.27258 | 2.2528752 | 384 | 713 | 1 | ||
| 63 | 221 | 102.27258 | 2.2528749 | 384 | 713 | 1 | ||
| 64 | 222 | 102.27258 | 2.2528744 | 384 | 713 | 1 | ||
| 65 | 223 | 102.27259 | 2.2528741 | 384 | 713 | 1 | ||
| 66 | 224 | 102.27259 | 2.2528738 | 384 | 713 | 1 | ||
| 67 | 225 | 102.27259 | 2.2528735 | 384 | 713 | 1 | ||
| 68 | 226 | 102.27259 | 2.252873 | 384 | 713 | 1 | ||
| 69 | 227 | 102.2726 | 2.2528727 | 384 | 713 | 1 | ||
| 70 | 228 | 102.2726 | 2.2528722 | 384 | 713 | 1 | ||
| 71 | 229 | 102.2726 | 2.2528718 | 384 | 713 | 1 | ||
| 72 | 230 | 102.27261 | 2.2528715 | 384 | 713 | 1 | ||
| 73 | 231 | 102.27261 | 2.2528712 | 384 | 713 | 1 | ||
| 74 | 195 | 102.27261 | 2.2528706 | 384 | 713 | 1 | ||
| 75 | 194 | 102.27262 | 2.2528847 | 384 | 713 | 2 | ||
| 76 | 193 | 102.27262 | 2.2528996 | 384 | 713 | 2 | ||
| 77 | 192 | 102.27262 | 2.2529086 | 384 | 713 | 1 | ||
| 78 | 166 | 102.27264 | 2.2529071 | 384 | 713 | 2 | ||
| 79 | 165 | 102.27265 | 2.2529057 | 384 | 713 | 2 | ||
| 80 | 119 | 102.27265 | 2.2529111 | 384 | 713 | 1 | ||
| 81 | 120 | 102.27265 | 2.2529138 | 384 | 713 | 1 | ||
| 82 | 121 | 102.27265 | 2.2529178 | 384 | 713 | 1 | ||
| 83 | 122 | 102.27265 | 2.2529216 | 384 | 713 | 1 | ||
| 84 | 123 | 102.27266 | 2.2529251 | 384 | 713 | 1 | ||
| 85 | 124 | 102.27266 | 2.2529265 | 384 | 713 | 1 | ||
| 86 | 141 | 102.27266 | 2.2529289 | 384 | 713 | 1 | ||
| 87 | 142 | 102.27266 | 2.2529325 | 384 | 713 | 1 | ||
| 88 | 143 | 102.27266 | 2.2529367 | 384 | 713 | 1 | ||
| 89 | 144 | 102.27266 | 2.25294 | 384 | 713 | 1 | ||
| 90 | 145 | 102.27266 | 2.2529414 | 384 | 713 | 1 | ||
| 91 | 146 | 102.27266 | 2.2529411 | 384 | 713 | 1 | ||
| 92 | 147 | 102.27267 | 2.2529409 | 384 | 713 | 1 | ||
| 93 | 148 | 102.27267 | 2.2529407 | 384 | 713 | 1 | ||
| 94 | 149 | 102.27267 | 2.2529405 | 384 | 713 | 1 | ||
| 95 | 150 | 102.27267 | 2.2529404 | 384 | 713 | 1 | ||
| 96 | 151 | 102.27268 | 2.2529402 | 384 | 713 | 1 | ||
| 97 | 152 | 102.27268 | 2.25294 | 384 | 713 | 1 | ||
| 98 | 713 | 102.27268 | 2.2529351 | 384 | 713 | 1 | Adjusting mechanism (adjuster star wheel) | 3rd destination |
| 99 | 152 | 102.27268 | 2.25294 | 713 | 683 | 1 | ||
| 100 | 151 | 102.27268 | 2.2529402 | 713 | 683 | 1 | ||
| 101 | 150 | 102.27267 | 2.2529404 | 713 | 683 | 1 | ||
| 102 | 149 | 102.27267 | 2.2529405 | 713 | 683 | 1 | ||
| 103 | 148 | 102.27267 | 2.2529407 | 713 | 683 | 1 | ||
| 104 | 147 | 102.27267 | 2.2529409 | 713 | 683 | 1 | ||
| 105 | 146 | 102.27266 | 2.2529411 | 713 | 683 | 1 | ||
| 106 | 145 | 102.27266 | 2.2529414 | 713 | 683 | 1 | ||
| 107 | 162 | 102.27266 | 2.252944 | 713 | 683 | 1 | ||
| 108 | 163 | 102.27266 | 2.2529477 | 713 | 683 | 1 | ||
| 109 | 164 | 102.27266 | 2.2529515 | 713 | 683 | 1 | ||
| 110 | 24 | 102.27266 | 2.2529569 | 713 | 683 | 1 | ||
| 111 | 25 | 102.27266 | 2.2529567 | 713 | 683 | 1 | ||
| 112 | 26 | 102.27267 | 2.2529567 | 713 | 683 | 1 | ||
| 113 | 27 | 102.27267 | 2.2529564 | 713 | 683 | 1 | ||
| 114 | 28 | 102.27267 | 2.2529563 | 713 | 683 | 1 | ||
| 115 | 29 | 102.27268 | 2.2529562 | 713 | 683 | 1 | ||
| 116 | 30 | 102.27268 | 2.2529559 | 713 | 683 | 1 | ||
| 117 | 31 | 102.27268 | 2.2529558 | 713 | 683 | 1 | ||
| 118 | 32 | 102.27269 | 2.2529557 | 713 | 683 | 1 | ||
| 119 | 33 | 102.27269 | 2.2529554 | 713 | 683 | 1 | ||
| 120 | 683 | 102.27269 | 2.2529501 | 713 | 683 | 1 | Bucket seat | 4th destination |
References
- Adamatzky, A. Shortest Path Solvers. From Software to Wetware; Springer: Berlin/Heidelberg, Germany, 2018; Volume 32. [Google Scholar]
- Papadopoulos, S.; Kompatsiaris, Y.; Vakali, A.; Spyridonos, P. Community detection in social media, performance and application considerations. J. Data Min. Knowl. Discov. 2012, 24, 515–554. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Sohn, M.Y. Classification of Efficient Total Domination Sets of Circulant Graphs of Degree 5. Symmetry 2020, 12, 1944. [Google Scholar] [CrossRef]
- Yang, L.; Li, D.; Tan, R. Shortest Path Solution of Trapezoidal Fuzzy Neutrosophic Graph Based on Circle-Breaking Algorithm. Symmetry 2020, 12, 1360. [Google Scholar] [CrossRef]
- Kalaitzakis, A. Comparative Study of Community Detection Algorithms in Social Networks. Ph.D. Thesis, Technological Educational Institute of Crete, Heraklion, Greece, 1939. [Google Scholar]
- Bharath-Kumar, K.; Jaffe, J.M. Routing to Multiple Destinations in Computer Networks. IEEE Trans. Commun. 1983, 31, 343–351. [Google Scholar] [CrossRef]
- Ben Ticha, H.; Absi, N. A Solution Method for the Multi-Destination Bi-Objectives Shortest Path Problem; Elsevier: Amsterdam, The Netherlands, 2017. [Google Scholar] [CrossRef]
- Dong, Y.F.; Xia, H.M.; Zhou, Y.C. Disordered and Multiple Destinations Path Planning Methods for Mobile Robot in Dynamic Environment. J. Electr. Comput. Eng. 2016, 2016, 3620895. [Google Scholar] [CrossRef]
- Sepehrifar, M.K.; Zamanifar, K.; Sepehrifar, M.B. An Algorithm to Select the Optimal Composition of the Services. J. Theor. Appl. Inf. Technol. 2009, 8, 154–161. [Google Scholar]
- Wang, W.; Uehara, M.; Ozaki, H. Evaluation of navigation based on system optimal traffic assignment for connected cars. Int. J. Grid Util. Comput. 2020, 11, 525–532. [Google Scholar] [CrossRef]
- Burgaña, J.L. Design and evaluation of a link-state routing protocol for Internet-Wide Geocasting. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2017. [Google Scholar]
- Sepehrifar, M.K.; Fanian, A.; Sepehrifar, B. Shortest Path Computation in a Network with Multiple Destinations. Arab. J. Sci. Eng. 2020, 45, 3223–3231. [Google Scholar] [CrossRef]
- Jubair, F.; Hawa, M. Exploiting Obstacle Geometry to Reduce Search Time in Grid-Based Pathfinding. Symmetry 2020, 12, 1186. [Google Scholar] [CrossRef]
- Rahman, M.S.; Ahmed, S. A survey on pairwise compatibility graphs. AKCE Int. J. Graphs Comb. 2020, 17, 788–795. [Google Scholar] [CrossRef]
- Easttom, W.; Adda, M. An enhanced view of incidence functions for applying graph theory to modeling network intrusions. WSEAS Trans. Inf. Sci. Appl. 2020, 15, 102–109. [Google Scholar]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Arman, N.; Khamayseh, F. A Path-Compression Approach for Improving Shortest-Path Algorithms. Int. J. Electr. Comput. Eng. 2015, 5, 772–781. [Google Scholar] [CrossRef]
- Hakeem, A.; Gehani, N.; Ding, X.; Curtmola, R.; Borcea, C. Multi-destination vehicular route planning with parking and traffic constraints. In Proceedings of the 16th EAI International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, Houston, TX, USA, 12–14 November 2019; pp. 298–307. [Google Scholar]
- Hu, W.-C.; Wu, H.-T.; Cho, H.-H.; Tseng, F.-H. Optimal Route Planning System for Logistics Vehicles Based on Artificial Intelligence. J. Internet Technol. 2020, 21, 757–764. [Google Scholar]
- Li, X.; Yin, H. Optimal Mobile Relays Positions and Resource Allocation for Multi-Relay Multi-Destination Wireless Networks. IEEE Access 2020, 8, 47993–48004. [Google Scholar] [CrossRef]
- Anđelić, M.; Živković, D. Efficient Algorithm for Generating Maximal L-Reflexive Trees. Symmetry 2020, 12, 809. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Z. AOA-Based Three-Dimensional Positioning and Tracking Using the Factor Graph Technique. Symmetry 2020, 12, 1400. [Google Scholar] [CrossRef]
- Panić, B.; Kontrec, N.; Vujošević, M.; Panić, S. A Novel Approach for Determination of Reliability of Covering a Node from K Nodes. Symmetry 2020, 12, 1461. [Google Scholar] [CrossRef]
- Slamin, S.; Adiwijaya, N.O.; Hasan, M.A.; Dafik, D.; Wijaya, K. Local Super Antimagic Total Labeling for Vertex Coloring of Graphs. Symmetry 2020, 12, 1843. [Google Scholar] [CrossRef]
- Martínez, A.C.; García, S.C.; García, A.C.; Del Rio, A.M.G. On the Outer-Independent Roman Domination in Graphs. Symmetry 2020, 12, 1846. [Google Scholar] [CrossRef]
- Martínez, A.C.; Estrada-Moreno, A.; Rodríguez-Velázquez, J.A. Secure w-Domination in Graphs. Symmetry 2020, 12, 1948. [Google Scholar] [CrossRef]
- Lv, Y.; Liu, M.; Xiang, Y. Fast Searching Density Peak Clustering Algorithm Based on Shared Nearest Neighbor and Adaptive Clustering Center. Symmetry 2020, 12, 2014. [Google Scholar] [CrossRef]
- Balakrishnan, A.; Banciu, M.; Glowacka, K.; Mirchandani, P. Hierarchical approach for survivable network design. Eur. J. Oper. Res. 2013, 225, 223–235. [Google Scholar] [CrossRef]
- Fredman, M.L.; Tarjan, R.E. Fibonacci heaps and their uses in improved network optimization algorithms. J. ACM 1987, 34, 596–615. [Google Scholar] [CrossRef]
- Qu, T.; Cai, Z. A Fast Isomap Algorithm Based on Fibonacci Heap. In International Conference in Swarm Intelligence; Springer: Cham, Switzerland, 2015; pp. 225–231. [Google Scholar]
- Lu, X.; Camitz, M. Finding the shortest paths by node combination. Appl. Math. Comput. 2011, 217, 6401–6408. [Google Scholar] [CrossRef]
- Orlin, J.B.; Madduri, K.; Subramani, K.; Williamson, M. A faster algorithm for the single source shortest path problem with few distinct positive lengths. J. Discret. Algorithms 2010, 8, 189–198. [Google Scholar] [CrossRef]
- Thorup, M. Undirected single-source shortest paths with positive integer weights in linear time. J. ACM 1999, 46, 362–394. [Google Scholar] [CrossRef]
- Thorup, M. On RAM Priority Queues. SIAM J. Comput. 2000, 30, 86–109. [Google Scholar] [CrossRef]
- MacCormick, J. What Can Be Computed? A Practical Guide to the Theory of Computation; Princeton University Press: Princeton, NJ, USA, 2018. [Google Scholar]
- Xu, M.; Liu, Y.; Huang, Q.; Zhang, Y.; Luan, G. An improved Dijkstra’s shortest path algorithm for sparse network. Appl. Math. Comput. 2007, 185, 247–254. [Google Scholar] [CrossRef]
- Holzer, M.; Schulz, F.; Wagner, D.; Willhalm, T. Combining speed-up techniques for shortest-path computations. ACM J. Exp. Algorithmics 2005, 10, 2–5. [Google Scholar] [CrossRef]
- Chen, Y.-Z.; Shen, S.-F.; Chen, T.; Yang, R. Path Optimization Study for Vehicles Evacuation based on Dijkstra Algorithm. Procedia Eng. 2014, 71, 159–165. [Google Scholar] [CrossRef]
- Madkour, A.; Aref, W.G.; Rehman, F.U.; Rahman, M.A.; Basalamah, S. A survey of shortest-path algorithms. arXiv 2017, arXiv:1705.02044. [Google Scholar]
- Okengwu, U.A.; Nwachukwu, E.O.; Osegi, E.N. Modified Dijkstra algorithm with invention hierarchies applied to a conic graph. arXiv 2015, arXiv:1503.02517. [Google Scholar]
- Hong, Y.; Li, D.; Wu, Q.; Xu, H. Priority-Oriented Route Network Planning for Evacuation in Constrained Space Scenarios. J. Optim. Theory Appl. 2019, 181, 279–297. [Google Scholar] [CrossRef]
- Jin, W.; Chen, S.; Jiang, H. Finding the K shortest paths in a time-schedule network with constraints on arcs. Comput. Oper. Res. 2013, 40, 2975–2982. [Google Scholar] [CrossRef]
- Ananta, M.T.; Jiang, J.-R.; Muslim, M.A. Multicasting with the extended Dijkstra’s shortest path algorithm for software defined networking. Int. J. Appl. Eng. Res. 2014, 9, 21017–21030. [Google Scholar]




















| Item | Category |
|---|---|
| Antenna cable | Audio/video devices |
| Bumper | Body components, including trim |
| Adjusting mechanism | Braking system |
| Bucket seat | Car seat |
| SL No. | Algorithm Name | Total Visited Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 93 | 95 |
| 2 | CDSSSD | 124 | 136 |
| 3 | MDMSMD | 120 | 125 |
| Item | Category |
|---|---|
| Antenna assembly | Audio/video devices |
| ABS steel pin | Braking system |
| Back seat | Car seat |
| Door switch | Electrical switches |
| Distributor cap | Engine components and parts |
| Oil gasket | Engine oil systems |
| SL No. | Algorithm Name | Total Visited Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 129 | 131 |
| 2 | CDSSSD | 220 | 242 |
| 3 | MDMSMD | 175 | 179 |
| Item | Category |
|---|---|
| Radio and media player | Audio/video devices |
| Cowl screen | Body components, including trim |
| Adjusting mechanism (adjuster star wheel) | Braking system |
| Dashcam | Cameras |
| Bench seat | Car seat |
| Central locking | Doors |
| Fan ditch | Electrical switches |
| Engine compartment harness | Wiring harnesses |
| SL No. | Algorithm Name | Total Visited Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 119 | 121 |
| 2 | CDSSSD | 271 | 297 |
| 3 | MDMSMD | 227 | 239 |
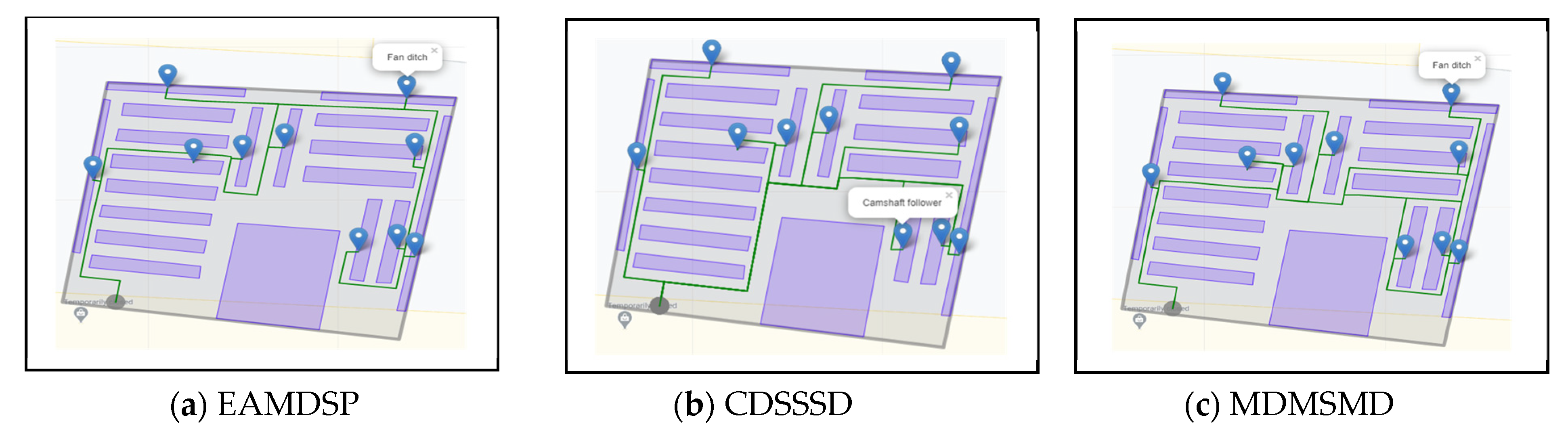
| Item | Category |
|---|---|
| Radiator core support | Body components |
| Brake pad | Braking system |
| Fan ditch | Electrical switches |
| Camshaft follower | Engine components and parts |
| PCV valve | Engine components and parts |
| Oil suction filter | Engine oil systems |
| Battery box | Low voltage electrical supply system |
| Alarm and siren | Miscellaneous |
| Wiring connector | Miscellaneous |
| Glowplug | Starting system |
| SL No. | Algorithm Name | Total Visited Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 164 | 170 |
| 2 | CDSSSD | 377 | 414 |
| 3 | MDMSMD | 227 | 236 |
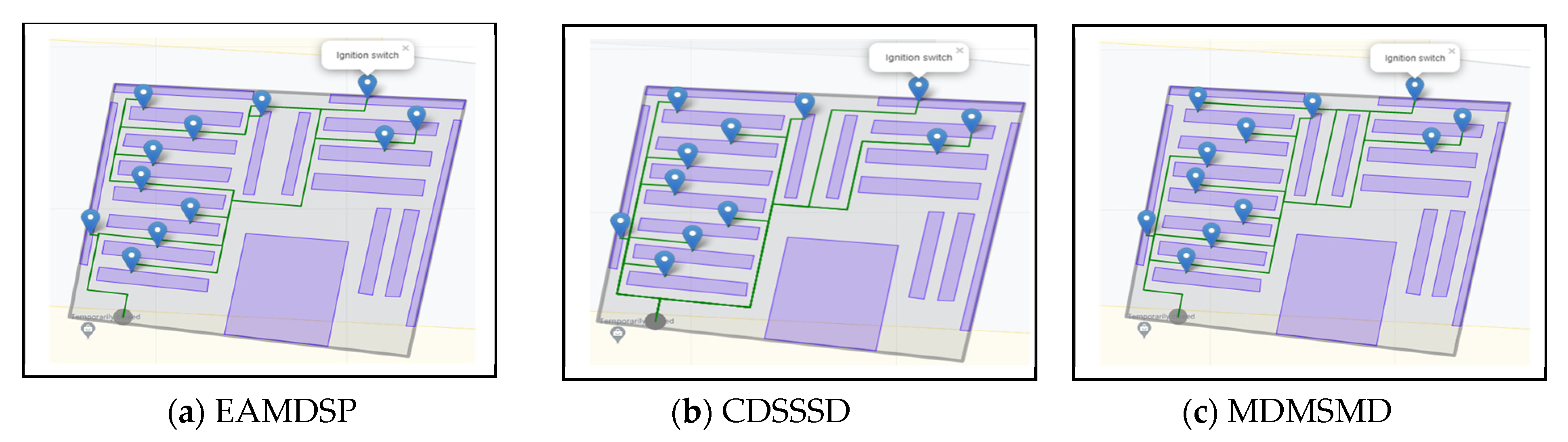
| Item | Category |
|---|---|
| Tuner | Audio/video devices |
| Fascia rear and support | Body components |
| Brake backing plate | Braking system |
| Front seat | Car seat |
| Front Right Outer door handle | Doors |
| Ignition switch | Electrical switches |
| Fuel gauge | Gauges and meters |
| Ignition magneto | Ignition system |
| Side lighting | Lighting and signaling system |
| Coolant temperature sensor | Sensors |
| Sunroof glass | Windows |
| Air conditioning harness | Wiring harnesses |
| SL No. | Algorithm Name | Total Visited Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 213 | 220 |
| 2 | CDSSSD | 378 | 408 |
| 3 | MDMSMD | 315 | 327 |
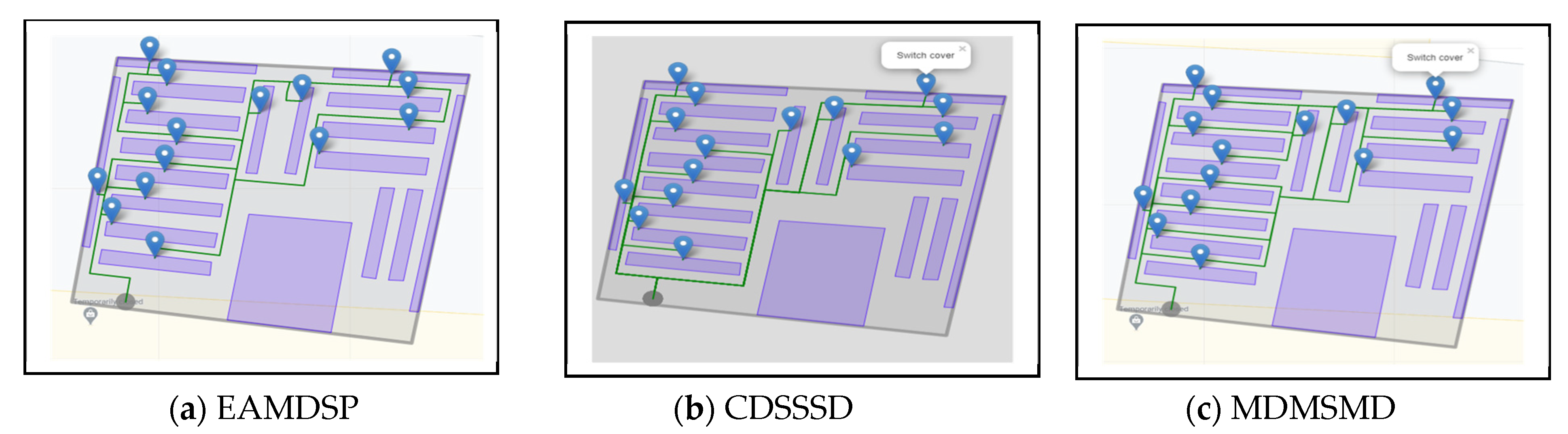
| Item | Category |
|---|---|
| Front fascia and header panel | Body components |
| Brake disc | Braking system |
| Brake booster hose | Braking system |
| Backup camera | Cameras |
| Headrest | Car seat |
| Rear left side outer door handle | Doors |
| Switch cover | Electrical switches |
| Odometer | Gauges and meters |
| Distributor | Ignition system |
| Engine bay lighting | Lighting and signaling system |
| Shift improver | Miscellaneous |
| Knock sensor | Sensors |
| Starter drive | Starting system |
| Front left side door glass | Windows |
| Floor harness | Wiring harnesses |
| SL No. | Algorithm Name | Total Visited Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 225 | 233 |
| 2 | CDSSSD | 487 | 525 |
| 3 | MDMSMD | 393 | 409 |
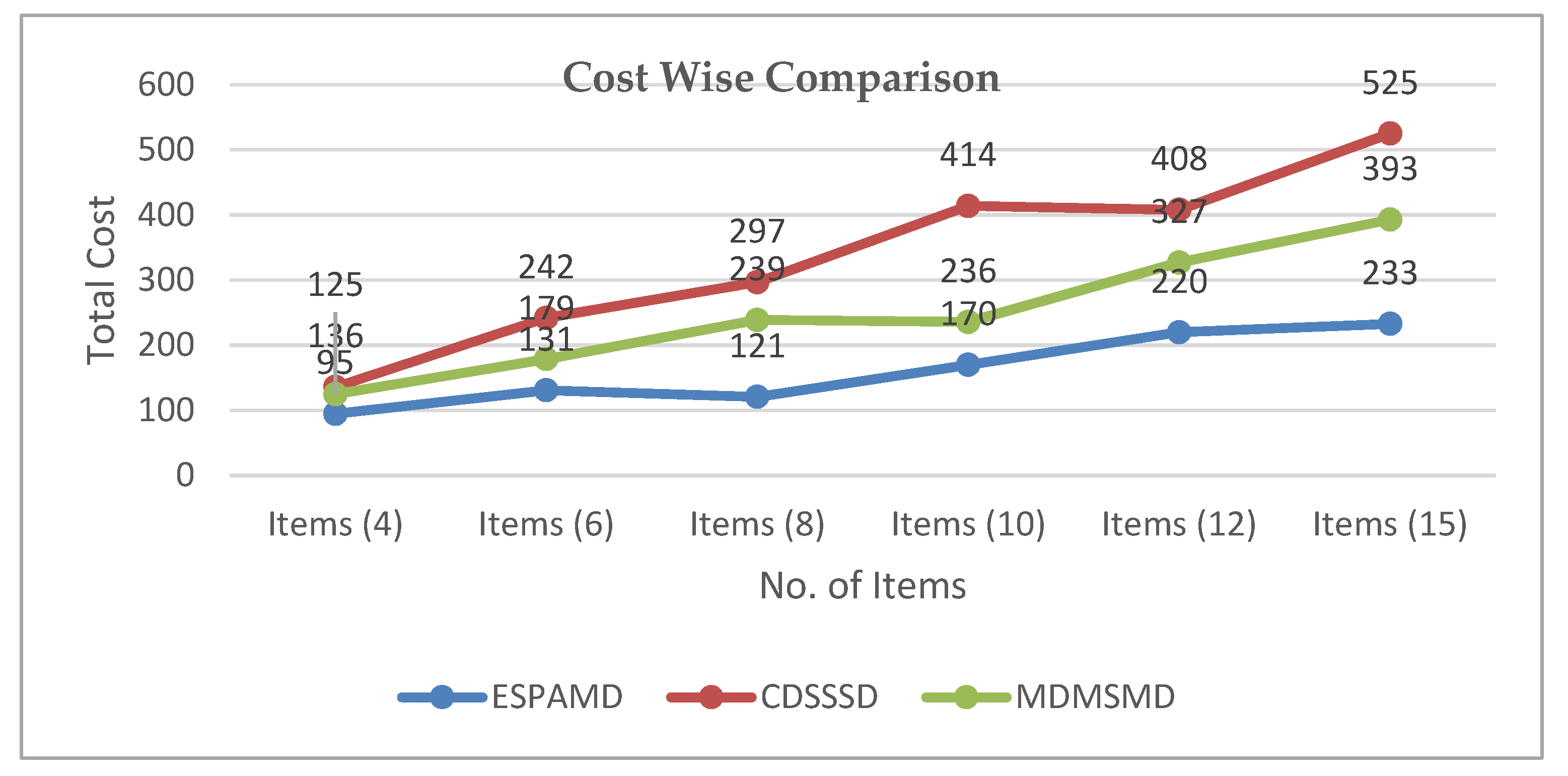
| SL No. | Algorithm Name | Items (4) | Items (6) | Items (8) | Items (10) | Items (12) | Items (15) |
|---|---|---|---|---|---|---|---|
| 1 | EAMDSP | 95 | 131 | 121 | 170 | 220 | 233 |
| 2 | CDSSSD | 136 | 242 | 297 | 414 | 408 | 525 |
| 3 | MDMSMD | 125 | 179 | 239 | 236 | 327 | 409 |
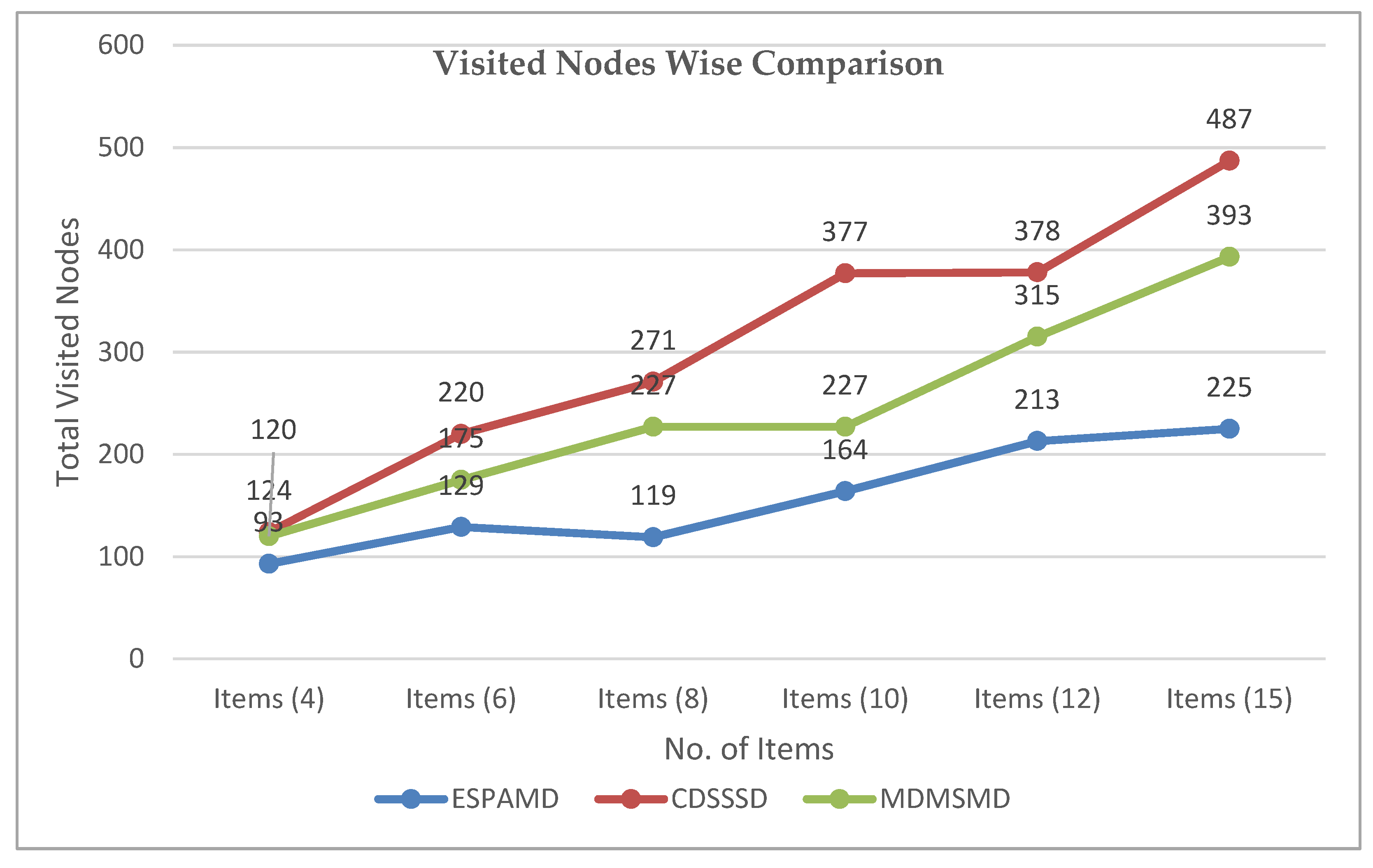
| SL No. | Algorithm Name | Items (4) | Items (6) | Items (8) | Items (10) | Items (12) | Items (15) |
|---|---|---|---|---|---|---|---|
| 1 | EAMDSP | 93 | 129 | 119 | 164 | 213 | 225 |
| 2 | CDSSSD | 124 | 220 | 271 | 377 | 378 | 487 |
| 3 | MDMSMD | 120 | 175 | 227 | 227 | 315 | 393 |
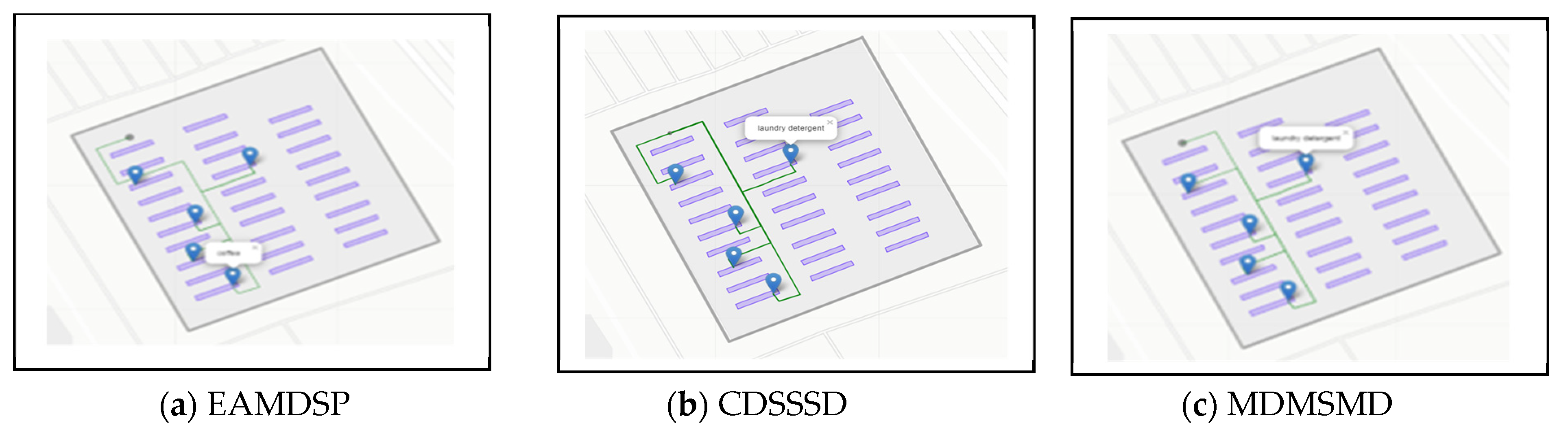
| Item | Category |
|---|---|
| Coffee | Beverages |
| Dinner rolls | Bread/Bakery |
| Vegetables | Canned/Jarred goods |
| Laundry detergent | Cleaners |
| Yogurt | Dairy |
| SL No. | Algorithm Name | Total Visited Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 45 | 54 |
| 2 | CDSSSD | 60 | 84 |
| 3 | MDMSMD | 52 | 69 |
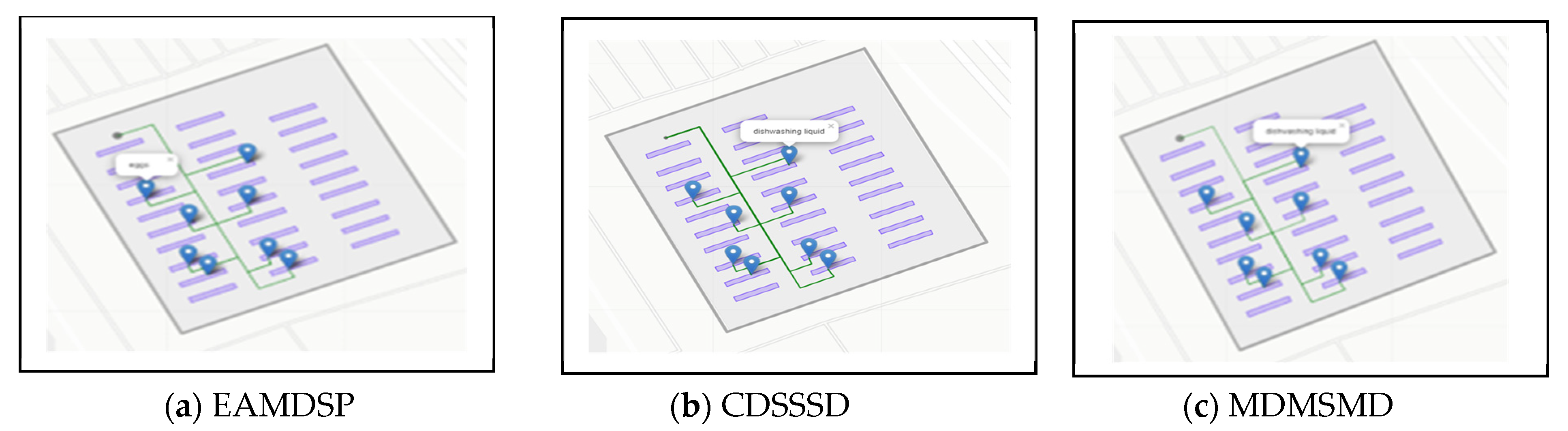
| Item | Category |
|---|---|
| Soda | Beverages |
| Sandwich loaves | Bread/Bakery |
| Vegetables | Canned/Jarred goods |
| Dishwashing liquid | Cleaners |
| Eggs | Dairy |
| Mixes | Dry/Baking goods |
| Vegetables | Frozen foods |
| Pork | Meat |
| SL No. | Algorithm Name | Total Visited Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 58 | 67 |
| 2 | CDSSSD | 104 | 150 |
| 3 | MDMSMD | 72 | 95 |
| Item | Category |
|---|---|
| Juice | Beverages |
| Dinner rolls | Bread/Bakery |
| Spaghetti sauce | Canned/Jarred goods |
| Dishwashing detergent | Cleaners |
| Cheeses | Dairy |
| Flour | Dry/Baking goods |
| Individual meals | Frozen foods |
| Lunch meat | Meat |
| Batteries | Others |
| Paper towels | Paper goods |
| Shampoo | Personal cares |
| SL No. | Algorithm Name | Total Nodes | Total Cost |
|---|---|---|---|
| 1 | EAMDSP | 78 | 88 |
| 2 | CDSSSD | 124 | 165 |
| 3 | MDMSMD | 101 | 132 |
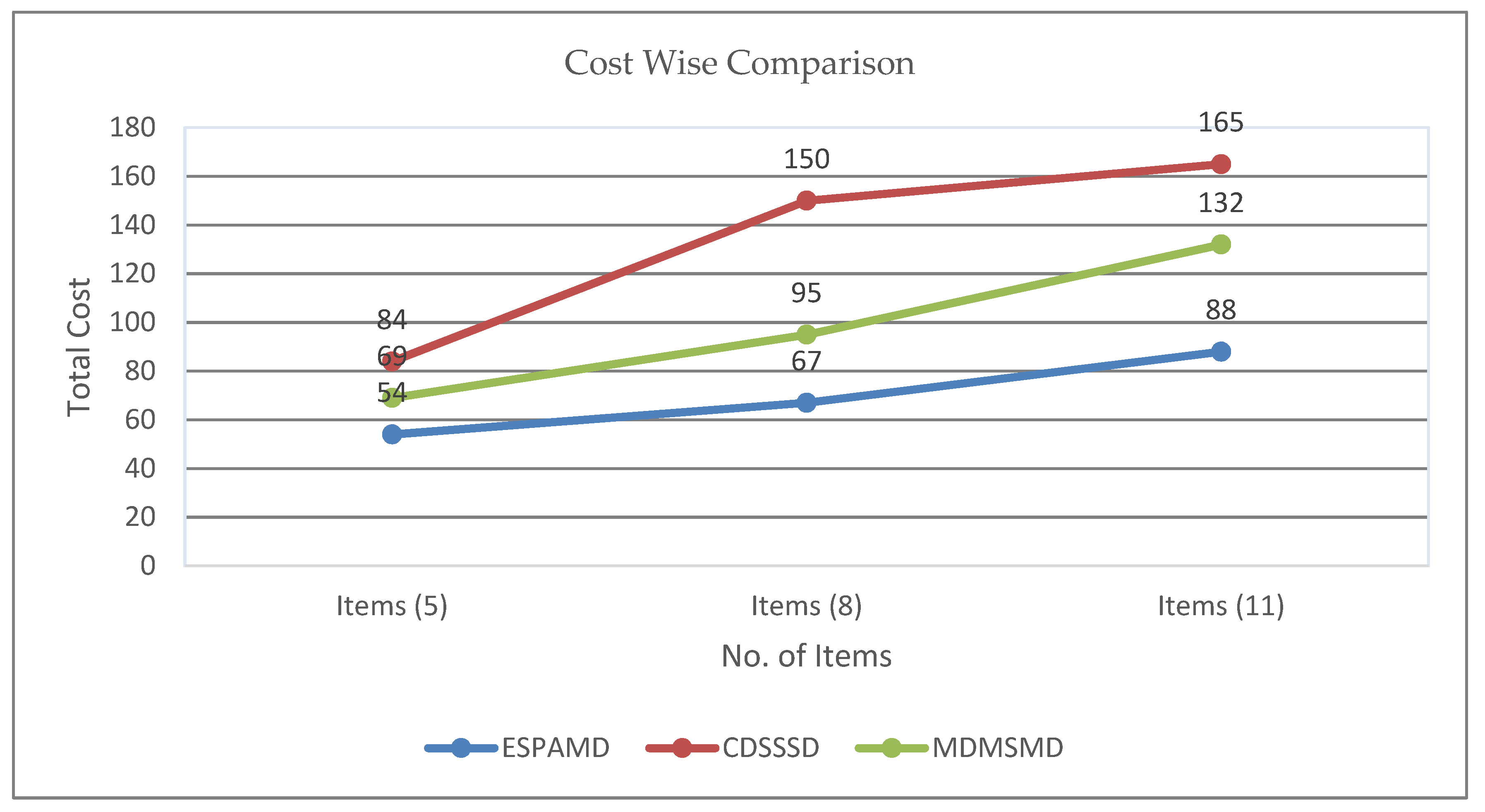
| SL No. | Algorithm Name | Items (5) | Items (8) | Items (11) |
|---|---|---|---|---|
| 1 | EAMDSP | 54 | 67 | 88 |
| 2 | CDSSSD | 84 | 150 | 165 |
| 3 | MDMSMD | 69 | 95 | 132 |
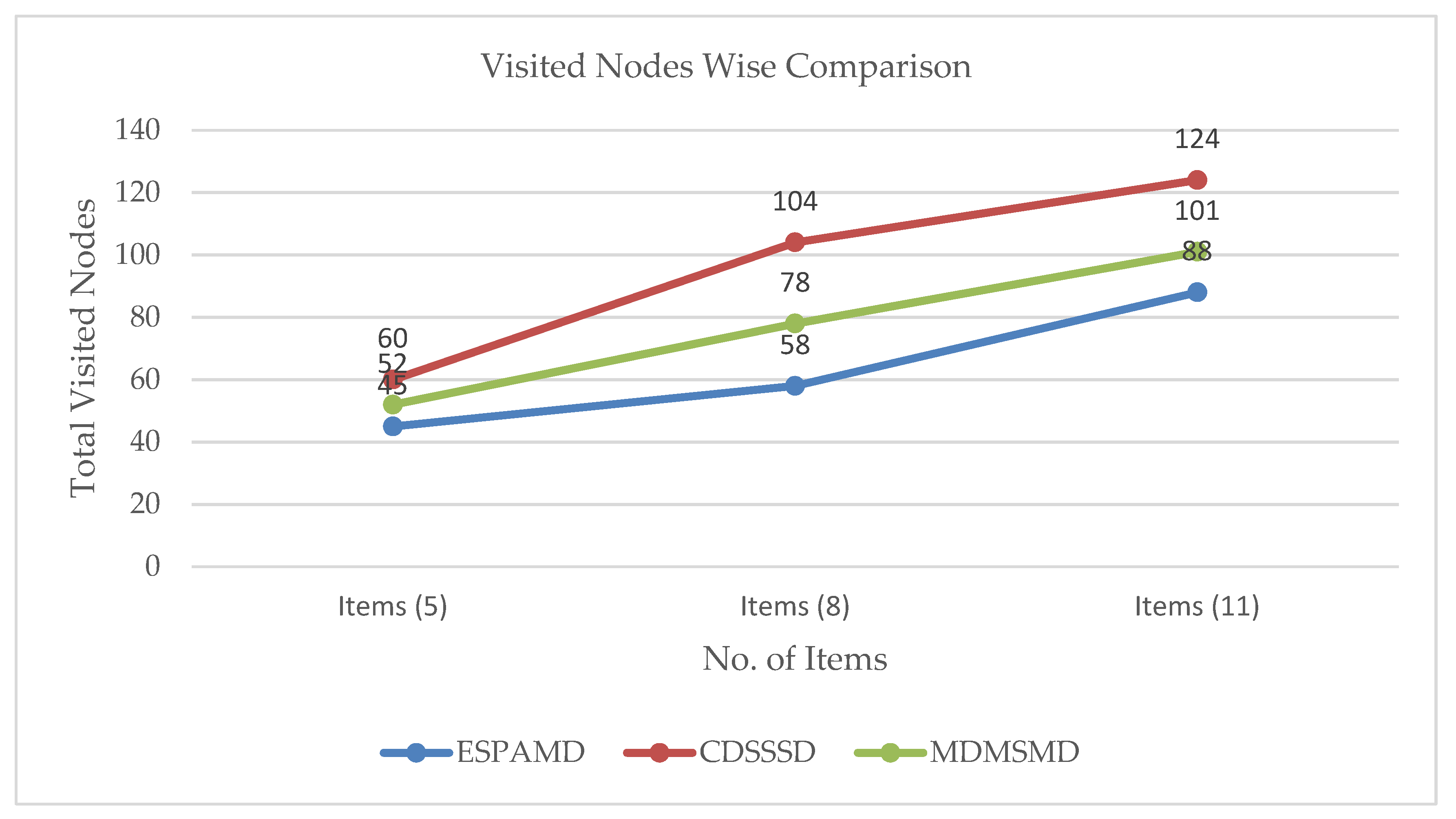
| SL No. | Algorithm Name | Items (5) | Items (8) | Items (11) |
|---|---|---|---|---|
| 1 | EAMDSP | 45 | 58 | 88 |
| 2 | CDSSSD | 60 | 104 | 124 |
| 3 | MDMSMD | 52 | 78 | 101 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asaduzzaman, M.; Geok, T.K.; Hossain, F.; Sayeed, S.; Abdaziz, A.; Wong, H.-Y.; Tso, C.P.; Ahmed, S.; Bari, M.A. An Efficient Shortest Path Algorithm: Multi-Destinations in an Indoor Environment. Symmetry 2021, 13, 421. https://doi.org/10.3390/sym13030421
Asaduzzaman M, Geok TK, Hossain F, Sayeed S, Abdaziz A, Wong H-Y, Tso CP, Ahmed S, Bari MA. An Efficient Shortest Path Algorithm: Multi-Destinations in an Indoor Environment. Symmetry. 2021; 13(3):421. https://doi.org/10.3390/sym13030421
Chicago/Turabian StyleAsaduzzaman, Mina, Tan Kim Geok, Ferdous Hossain, Shohel Sayeed, Azlan Abdaziz, Hin-Yong Wong, C. P. Tso, Sharif Ahmed, and Md Ahsanul Bari. 2021. "An Efficient Shortest Path Algorithm: Multi-Destinations in an Indoor Environment" Symmetry 13, no. 3: 421. https://doi.org/10.3390/sym13030421
APA StyleAsaduzzaman, M., Geok, T. K., Hossain, F., Sayeed, S., Abdaziz, A., Wong, H.-Y., Tso, C. P., Ahmed, S., & Bari, M. A. (2021). An Efficient Shortest Path Algorithm: Multi-Destinations in an Indoor Environment. Symmetry, 13(3), 421. https://doi.org/10.3390/sym13030421