3. Generalized Travel Cost
By summarizing the literature on travel behavior, we find that the generalized travel cost consists of the following elements:
- (1)
Psychological time of waiting the bus
For travelers who choose buses, they arrive at the bus stop in the Poisson process with the intensity of
; let
denote the departure frequency of bus line
, let
denote the time of traveler
’s arrival at the bus stop, and the arrival of travelers can be regarded as independent random variables which obey the uniform distribution on the interval
. Thus, we have
, and the waiting time can be represented as
. Let
denote the number of travelers arriving at the bus stop at time
, and thus the expected waiting time of travelers can be formulated as
. According to the time processing theory, there is a certain difference between travelers’ psychological feeling and the actual physical time, and the psychological feeling is more in accordance with travelers’ perception of utility. Therefore, the physical time should be converted into psychological time
, and
and
represent travel purpose coefficient and attention coefficient, respectively. Moreover, we have
Solve Equation (1), and travelers’ psychological time of waiting the bus can be formulated as ; for the travelers who choose private car and shared bike, their psychological time of waiting is 0.
- (2)
Travel time
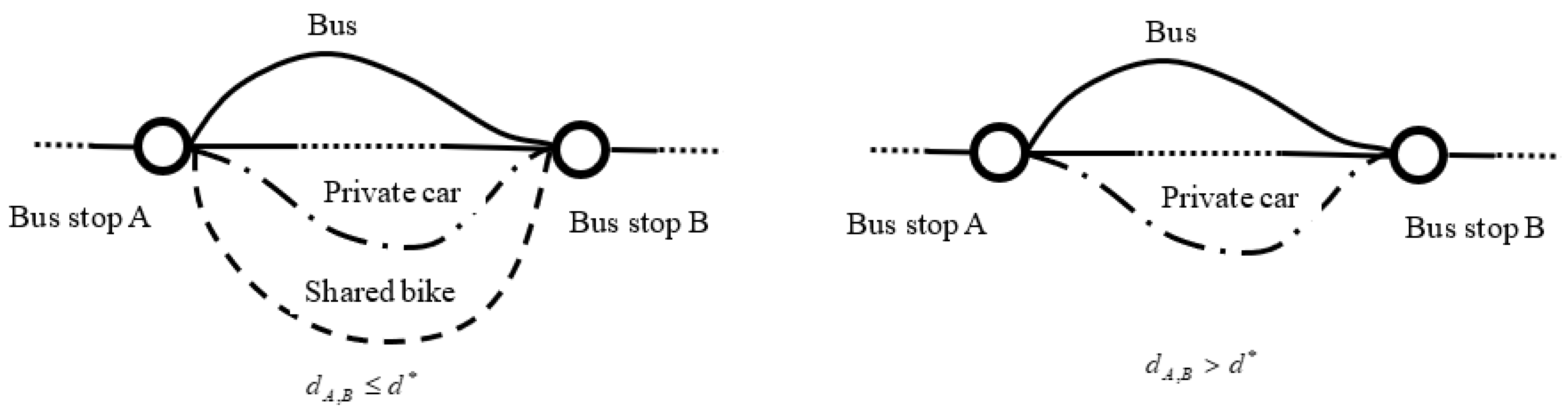
For travelers who choose buses between OD on day , if they choose the bus line , the travel time can be represented as . For travelers who choose private cars, in this paper, we assume that the travel time of private car between OD equals the shortest bus line travel time, which can be represented as . For travelers who choose shared bike, the travel time between OD is , in which is the distance between bus stop and , and is the average speed of a bicycle.
- (3)
Crowding degree
For travelers who choose buses, due to the restrictions of bus capacity and different stop schedule plans, the bus will be crowded; take bus line
which contains
bus stops for instance, and let
and
represent the up direction (from
to
) and down direction (from
to
) traffic flow between bus stop
and
on day
, respectively. Thus, we have
Then the maximum section flow is
, and the crowding degree of bus line
between bus stop
and
on day
can be formulated as
Here, represents the bus capacity of line , and is crowding factor. In addition, we assume that the crowding degree (not traffic jam) of private car and shared bike is 0.
- (4)
Bus ticket fare, parking fee of private car, and bike sharing fee
For travelers who choose buses, let denote the fare per kilometer of bus line ; thus, travelers need to pay . For travelers who choose private car and shared bike, they need to pay the parking fee and bike sharing fee, which are represented as and .
- (5)
The effect of social interaction on travel cost
Let
denote traveler
chooses bus, and
represents traveler
chooses other travel modes, while
is social interaction level. Let
denote traveler’s expectation of travel mode choice between bus stop
and
; thus,
, and according to the principle of multiplier interaction, the effect of social interaction on day
can be formulated as
In summary, the generalized travel cost between bus stop
and
on day
can be formulated as
Here, , , , , represent cost coefficients.
In the existing studies, some scholars use the social interaction model to simulate group travel choice behavior, but in reality, the essence of “interaction” is the diffusion of asymmetric and incomplete travel information in the group. Travelers make decisions based on the external information they receive, rather than being directly influenced by other travelers’ behavior. Therefore, in this paper, travelers’ social interaction is reflected in the information of generalized travel cost (Equation (5)) rather than the choice behavior itself.
6. Solution Algorithm of Multi-Objective Bi-Level Programming
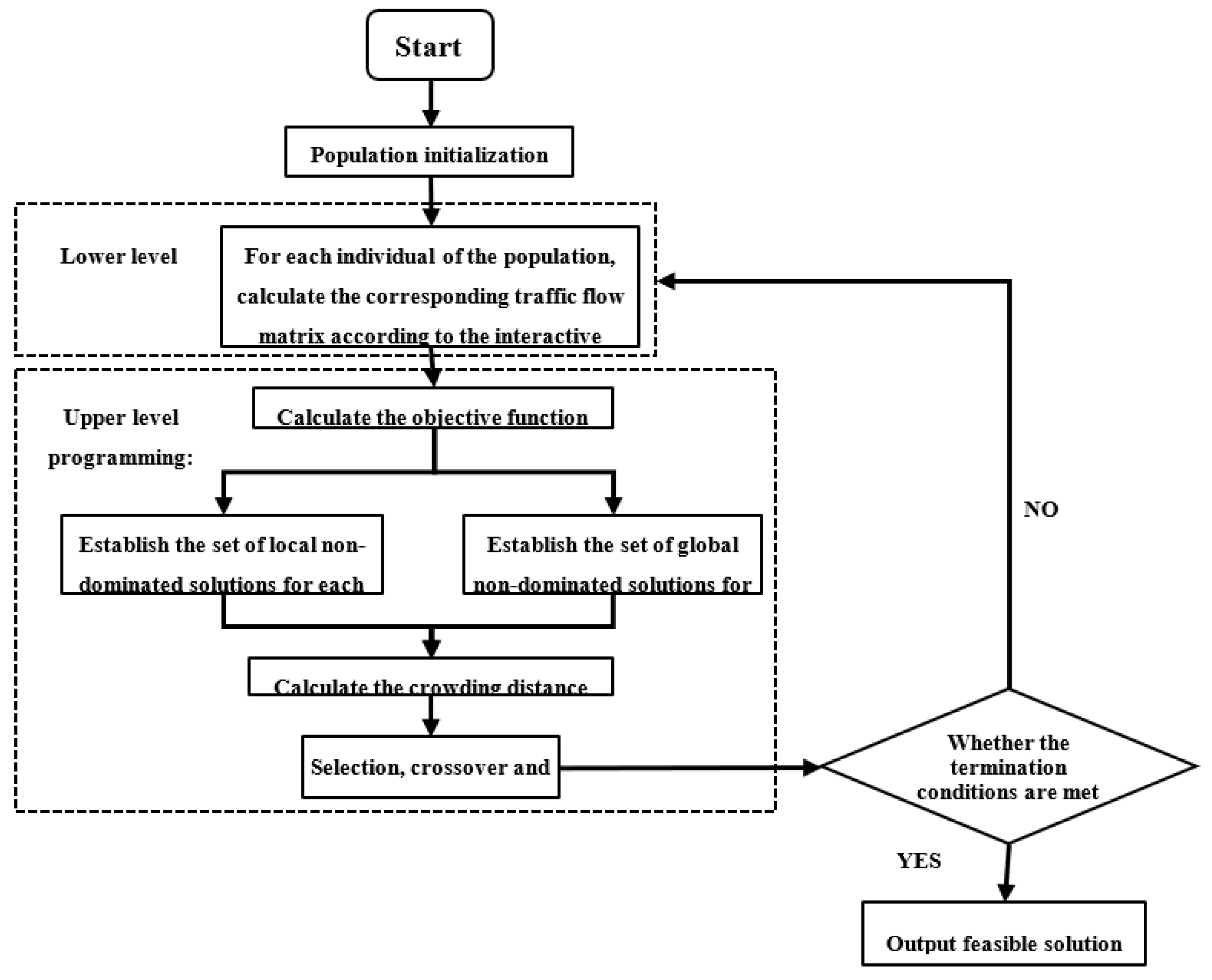
It can be seen from the above model that the multi-objective bi-level programming problem has the characteristics of multivariable and nonlinear; therefore, in this paper, we designed a solution algorithm in which the swarm intelligence multi-objective optimization algorithm is combined with the equalization algorithm of OD matrix. The algorithm steps are as follows:
Step 1: Population initialization. In recent years, swarm intelligence optimization algorithm based on complex network has been proven to be very effective in avoiding local optimum. Therefore, we first establish a network with grid structure for the population and introduce the small world network generation algorithm to depict the connections between individuals in the population, where each individual represents a solution .
Step 1.1: Set the region , as the complex network generation area; both and are integers, and each node represents an individual in the population.
Step 1.2: Each individual establishes connection with the surrounding eight neighbors to form a cellular network.
Step 1.3: Here, we introduce the method in literature [
24]. Let
be the rewiring probability of the network,
. We set a random number
for each node
; if
, cut one of node
’s links randomly, and then establish a new link between node
and a node that is not in the surrounding eight neighbors of node
. Thus, the new neighborhood is established. In order to make the population space achieve a better balance between complete certainty and complete randomness, we set
.
Step 2: The real encoding technique is employed, and the solution corresponding to individual is , in which the in is encoded with random number between 0 and 1. A random number larger than 0.5 means , otherwise .
Due to the existence of equilibrium conditions in the group Bush–Mosteller model, given the bus stop schedule plan (represented as the 0–1 matrix ) and the differentiated ticket fares (), through the continuous iteration of , , and , the equilibrium traffic flow OD matrix of various travel modes between bus stops can be obtained. The OD matrix equalization algorithm is designed as follows:
Step 2.1: Within a certain distance
, there is a competitive relationship between bus and shared bike; for each OD pair in
, given the bus ticket fare
(
), the shared bike management department will set the optimal equilibrium bike sharing fee
on the basis of generalized Nash equilibrium.
Equation (28) is a generalized Nash equilibrium problem in which represents the estimation of traffic flow by shared bike operators, and it can be calculated on the basis of logit model, where and represent the derivative relationship between traffic flow and the price of shared bike. Equation (28) can be solved by the method of classical sensitivity analysis, but we will not go into much detail here.
Step 2.2: For the given bus stop schedule plan , differentiated ticket fares , parking fee , and bike sharing fee , set the initial value of and to 0; set the iteration time ; and calculate the OD flow matrix on the basis of Equations (10)–(14).
Step 2.3: Substitute the into Equation (2) and calculate the traffic flow and of bus lines; then, the value of and are obtained. Moreover, the number of travelers that choose other travel mode () is obtained; substitute into Equation (4) and the value of is calculated.
Step 2.4: The generalized travel cost matrix () between bus stops is calculated according to Equation (5).
Step 2.5: Update the OD matrix of traffic flow according to Equations (10)–(14) on the basis of the new , and the is obtained.
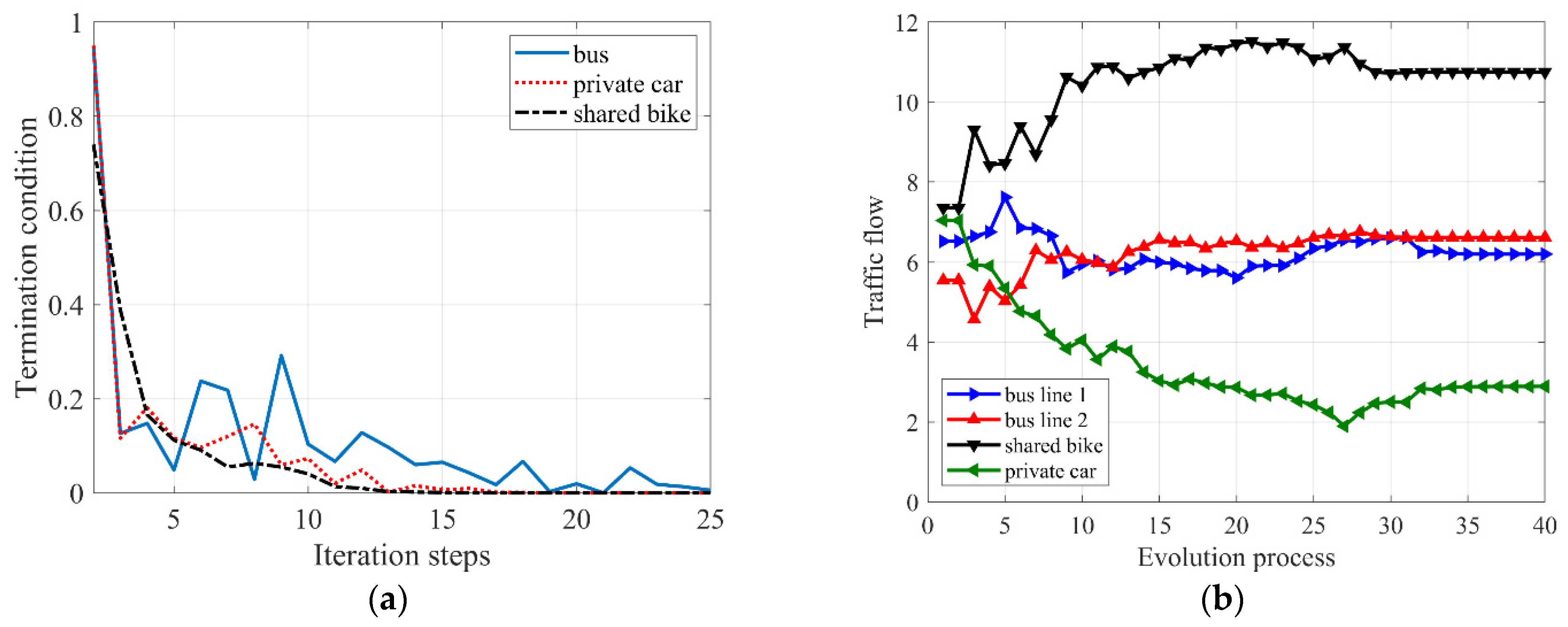
Step 2.6: For all the travel mode , let represent the termination condition (flow difference between different evolution steps). If this condition is satisfied, the algorithm will stop the iteration; otherwise, return to Step 2.3. Thus, is the traffic flow matrix corresponding to the given bus stop schedule plan (the 0–1 matrix ) and the differentiated ticket fares (). Then, calculate the objective function based on .
Step 3: Establish the set of local non-dominated solutions for each individual in the population. Let denote the non-dominated solutions set of individual . Add the objective function values (solutions) of individual ’s neighbors into : if the solution in is dominated by the newly added solution (), then delete the dominated solution in ; if the newly added solution is not dominated by any solution in , add the new solution into .
Step 4: Establish the set of global non-dominated solutions for all individuals. Let denote the global non-dominated solutions set, and add the objective function values (solutions) of every node of the population into : if the solution in is dominated by the newly added solution (), then delete the dominated solution in ; if the newly added solution is not dominated by any solution in , add the new solution into .
In terms of the constraint condition, we introduce the method of “constraint violation value” to illustrate the constraint violation degree of a solution; the constraint violation value is formulated as
where
means if
, then
, otherwise
. It can be seen that the smaller the value of
, the better the solution is. Therefore, the dominance between two solutions
and
can be redefined as
dominates if one of the following conditions is satisfied: (1) is a feasible solution, but is non-feasible solution; (2) Both and are non-feasible solutions, and ; (3) Both and are feasible solutions, and Pareto dominates .
Step 5: Calculate the crowding distance in
and
. Taking
as an example, the solutions in
are arranged in descending order from 1 to
according to the objective function value
, where
represents the number of solutions. The crowding distance of the
th solution of the objective function
is formulated as
Then, the crowding distance of the th solution is .
Step 6: Selection. We introduce the “roulette” method to select the optimal solution in and , and thus the probability of individual corresponding to the solution being selected is ; the individual selected in are marked as , and individual selected in are marked as .
Step 7: Crossover. Set
. According to the literature [
24], let
and
, then the crossover between
and
is formulated as
Step 8: Mutation. Let
be the probability of chaotic mutation; here, we use the “tent map” to iterate the chaotic sequence for its good ergodicity. The tent map is formulated as
, and the individual is updated according to the probability
(the value range of
is
):
Step 9: Determining whether the algorithm meets the termination condition (the Pareto front cannot be improved). If so, the algorithm stops, otherwise, return to Step 2.
The flow chart of the solution algorithm is illustrated in
Figure 2.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}