1. Introduction
Partial differential equations have a wide range of applications in applied sciences, including wave propagation, electric signal propagation, and atomic physics [
1,
2,
3,
4,
5]. In recent years, several numerical techniques for multidimensional hyperbolic partial differential equations have been developed [
6,
7,
8,
9,
10,
11]. For example, Gao and Chi [
12] solved one-space-dimensional linear hyperbolic model based on unconditionally stable difference schemes. Youssef [
13] studied the class of fractional functional integro-differential equations of the Caputo–Katugampola type. Many techniques have been used to solve fractional partial differential equations using the Caputo and the Caputo–Fabrizio type operators [
14,
15,
16]. Lai and Liu [
17] solved the second order fractional partial differential equation using the Galerkin finite element method and Riesz fractional derivative. Akram et al. [
18,
19] proposed unconditionally stable methods for the fractional hyperbolic models via B-spline approaches. Several years before this, the unconditionally stable alternating dimension implicit schemes for 2D and three-dimensional hyperbolic equations were derived by Mohanty and Jain [
20,
21]. Later, Mohanty [
22] also proposed new difference approach for the solution of telegraphic equation. Meanwhile, Dehghan and Mehebbi [
23,
24] suggested numerical approaches for 2D linear hyperbolic equations by applying collocation finite difference (FD) approximations. The other derived numerical schemes for hyperbolic partial differential equations can be seen in [
25,
26].
Most of the researchers discretized their presented issues using various types of discretization techniques such as the FD approach [
27], the finite element scheme [
28], and the boundary element approach [
29], among others. A sparse system of linear equations is obtained in the following form:
Iterative approaches are ideal for solving this sparse system of linear equations in this case. These iterative methods utilized all of the grid points in the solution domain , ( is grid spacing in both x and y direction) including the boundary points to achieve the convergence. Due to the involvement of all the grid knots in the suggested domain , these methods are forced to utilize a lot of algebraic operations in the iterative loop that resulted in large computational complexities and consume more execution time per iteration for their evaluation.
A number of studies on iterative schemes have been presented to improve the convergence rate in solving Equation (1). One of them is the establishment of the group iterative algorithms capable of reducing iterative process convergence times. We divide the entire domain into groups of knots, and values on each group are explicitly assessed using properly stated FD formulas that reduce the overall amount of arithmetic operations. Evans [
30] used the Explicit Group (EG) iterative method to solve the Poisson problem by creating a 4-point block iterative scheme. Evans and Yousif [
31,
32], Evans and Sahimi [
33], Evans and Hasan [
11] and Kew and Ali [
10] have extensively researched a range of EG iterative techniques for various forms of partial differential equations based on this idea. In addition, another type of group iterative method based on the half-sweep technique called Explicit Decoupled Group (EDG) approach is presented by Abdullah [
34] for solving Poisson differential equation. Later, Yousif and Evans [
35] and Ibrahim and Abdullah [
36] initiated half-sweep approach via EDG iterative scheme for the numerical solution of the elliptic partial differential and diffusion equations, respectively. Later, many authors utilized this approach for several other types of differential equations.
The use of modified groups quarter-sweep technique have been widely shown to provide faster rate of convergence. This approach can be constructed by implementation of FD approximation with
2h grid spacing in the discretized region. The quarter-sweep approach’s basic concept is based on time reduction techniques that use nearly the quarter grid points of the solution region and these points are treat as iterative points that involved in the iterative process. Just by using the quarter grid points of the suggested domain, iterative process reduces the computational complexity of the algorithm and hence ultimately decreases the execution of time per iteration. The remaining grid points that are not included in the iterative process are referred to as direct points, and they can be evaluated directly using the point iterative approach. On the basis of this concept, Othman and Abdullah [
37] discovered Modified Explicit Group (MEG) iterative approach for the numerical solution of 2D Poisson differential equation by utilizing the quarter grids stencil of the solution domain and results were found much better and faster than the results obtained from EDG iterative method derived from utilizing the half grids stencil for the same 2D Poission equation [
34].
Many authors applied this technique on several types of partial differential equations with promising results [
9,
38]. Because of the technique’s success with integer derivative PDEs, researchers are now attempting to adapt it to fractional differential equations. Balasim and Ali [
39,
40,
41] recently published preliminary work on parabolic partial differential equations of fractional order. The main purpose of this research is to investigate the capability of this technique for solving the 2D fractional telegraph equation on a family of four points with
2h grid spacing.
Consider the second-order time-fractional hyperbolic telegraph equation [
6],
where
,
are positive real constants and
is the forcing term. If
then Equation (2), reduces to the fractional damped wave equation.
Initial and boundary conditions are as follows:
where
Discretize the spatial domain as
,
and
where
,
and
and
N,
and
are the positive integers. The grid points of the discretized solution domain are given by
. The exact solution of the fractional differential Equation (2) is
, while the approximate solution is
and consider the following,
The Caputo’s time fractional derivative is defined as follows:
The following two equations of Caputo’s fractional derivatives of order
and
can be derived from Equation (3) by using the first and second time differential operators.
where
and
where
The structure of this paper is as follows: The derivation of MFEG iterative scheme based on
2h-spaced standard Crank–Nicolson FD approximation is explained in
Section 2.
Section 3 discusses the MFEG iterative scheme’s stability and convergence. Numerical Experimental and Results are discussed in
Section 4. The Conclusions are provided in the last
Section 5.
2. Modified Fractional Explicit Group (MFEG) Iterative Scheme
The
-spaced point and group iterative schemes for 2D fractional telegraph equation have been derived by Ali and Ali in [
6]. The following standard
2h-spaced iterative scheme can be obtain by utilizing standard
2h-spaced Crank–Nicolson scheme for space-derivatives and Caputo fractional derivatives from Equations (4) and (5) for time-derivatives in Equation (2), we have the following expression,
with initial and boundary conditions,
for all
,
and
where,
The suggested domain is discretized as, . From the initial condition, we have which implies .
For
,
for all
,
and
.
When Equation (6) is applied to a group of four points, the result is a
system of equations, as shown below.
where
,
,
,
,
Re-write the matrix Equation (7) as:
where,
For the evaluation of Equation (8), we divide the solution domain into groups of four-points with
2h grid spacing as described in [
9]. The iterations are generated on group of four-points on some initial guess and continue until predefined tolerance factor
is achieved. This group is examined explicitly as a single point in the iterative process. The values at the remaining grid points (ungrouped points) can be obtained using the traditional
-spaced FD approximation equation once convergence has occurred.
Equation (7) can be written in the following form,
Here are matrices
A,
B,
C,
,
,
,
and vectors
,
f and
are defined in
Appendix A.
Lemma 1. The coefficients and defined in Equations (4) and (5) for all satisfies the following properties [7], (1). and ,
(2). ,
(3). ,
(4). ,
(5). ,
(6). , .
4. Numerical Problems and Results
Two numerical problems are performed to test the viability of the proposed schemes in solving 2D hyperbolic telegraph differential Equation (2). The numerical tests are run on a PC with a Core 2 Duo 2.8 GHz processor and 2GB of RAM Windows XP SP3 with Cygwin C in Mathematica 11 software. We assume that the step sizes in both
x and
y directions are the same, i.e.,
in both numerical experiments. Throughout our numerical calculations, we employed the Gauss Seidel method with a relaxation factor of
equal to 1. The
norm was utilized for the convergence criterion, with a tolerance factor of
. Various mesh sizes of 20, 30, 40 and 50 were considered for different time steps of 1/20, 1/30, 1/40 and 1/50 in
Example 1 and mesh sizes of 25, 35, 45 and 55 were considered for different time steps of 1/25, 1/35, 1/45 and 1/55 in
Example 2. The numerical results in
Table 1 and
Table 2 are obtained using the FSP, FEG, and MFEG iterative methods in terms of elapsed time (in seconds), number of iterations, average absolute error, and maximum absolute error. The fractional standard point (FSP) and fractional explicit group (FEG) iterative schemes are derived in [
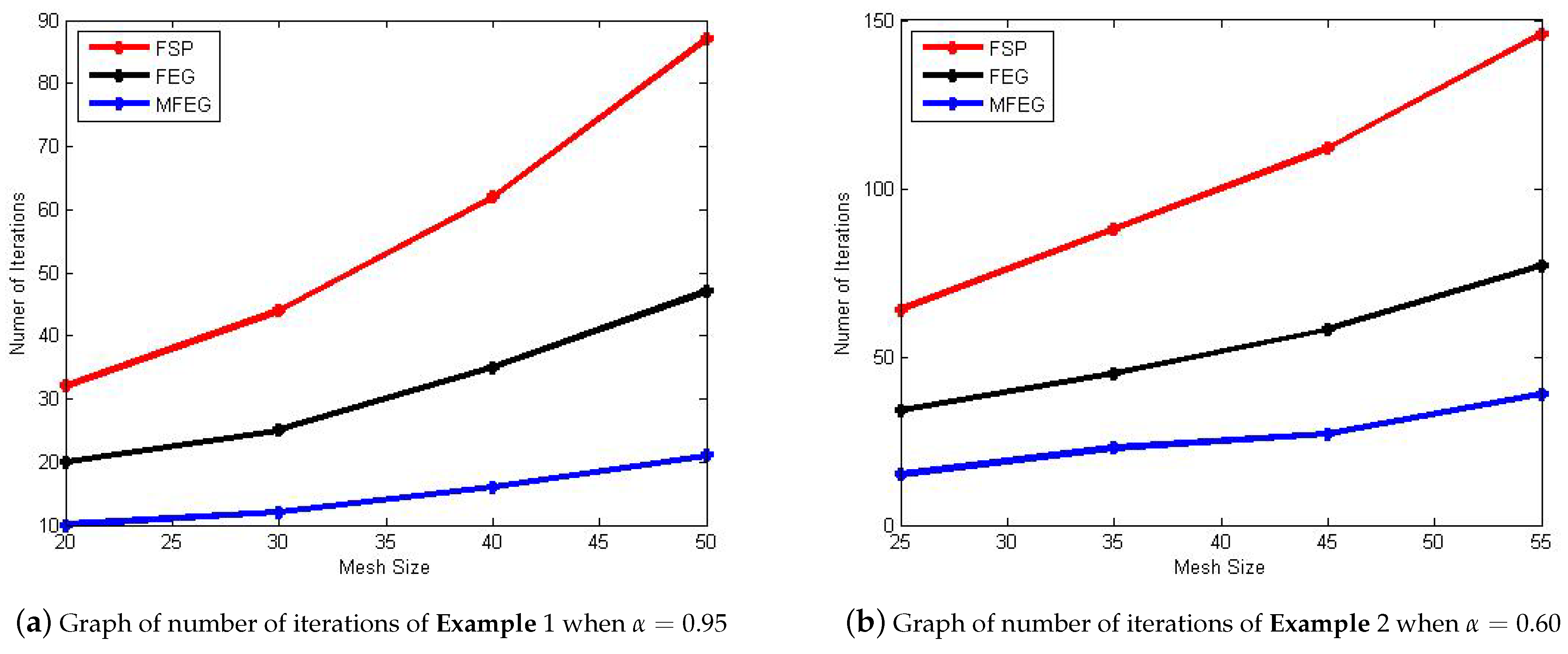
6] for 2D fractional telegraph equation. Graphs of execution time and iteration count are illustrated in
Figure 1 and
Figure 2 at various values of
for
Example 1 and
Example 2.
Example 1. Consider the 2D time-fractional telegraph model together where the forcing term is defined by [6],Initial and boundary conditions are defined as follows:The exact solution is Example 2. The 2D telegraph equation of fractional order is given by the following expression [6],Let and , thus we have,with the initial and boundary conditions:The exact solution is In
Table 1 and
Table 2, it is can be seen that execution time and iteration count decrease as value of
moves towards 2 by providing more accurate results.
The average absolute error and maximum absolute error are calculated by taking the absolute average and maximum absolute value of the column vector of errors, respectively. The maximum absolute error of the exact solution
and approximate solution
is defined as follows:
The temporal convergence order of the proposed method is defined as,
and the spatial convergence order of the proposed method is defined as,
Table 3 and
Table 4 represent the values of maximum absolute error and temporal convergence order of MFEG iterative scheme at various values of
of
Example 1 and
Example 2. For fixed value of
and different values of
, it is observed that MFEG iterative scheme generates
temporal convergence order as shown in
Table 3 and
Table 4. Meanwhile, the
Table 5 and
Table 6 show the values of maximum absolute error and spatial convergence order of MFEG iterative scheme at various values of
of
Example 1 and
Example 2. For fixed value of
and different values of
h, it shows that MFEG iterative scheme gets second-order spatial accuracy as exposed in
Table 5 and
Table 6.
The ranges of percentages of MFEG method against FSP and FEG methods in terms of execution time and number of iterations of
Example 1 at
and
Example 2 at
are summarized in
Table 7 and
Table 8, respectively.
Table 7 and
Table 8 refer to the study of the percentages of MFEG method in term of the execution timings and number of iterations against FSP and FEG methods for solving the 2D fractional telegraph equation.
Table 7 shows efficiency of execution of timings of MFEG method in
Example 1 is about (26.0–42.0)% and (50.0–55.0)% of FSP and FEG methods while
Table 8 indicates the execution of timings of MFEG method in
Example 2 is merely about (24.0–37.0)% and (45.0–63.0)% of FSP and FEG method. The efficient percentages of MFEG iterative method for the number of iterations for both examples can also been seen in
Table 7 and
Table 8.







{kind=link}
{kind=link}