1. Introduction
In this work, we study an optimal control problem for the stationary Stokes equations with variable density and viscosity in a domain
, which is assumed to be a bounded and connected set with boundary
of class
. Specifically, we consider the following system of partial differential equations (PDEs):
Here, the unknown functions are the velocity field , the hydrostatic pressure , and the density for a nonhomogeneous fluid that flows through the domain . The vector function represents a distributed control that acts on the motion equation and belongs to a closed and convex set ; the function describes the dynamic viscosity of the fluid; is the symmetric part of the velocity gradient (the deformation rate tensor), i.e., .
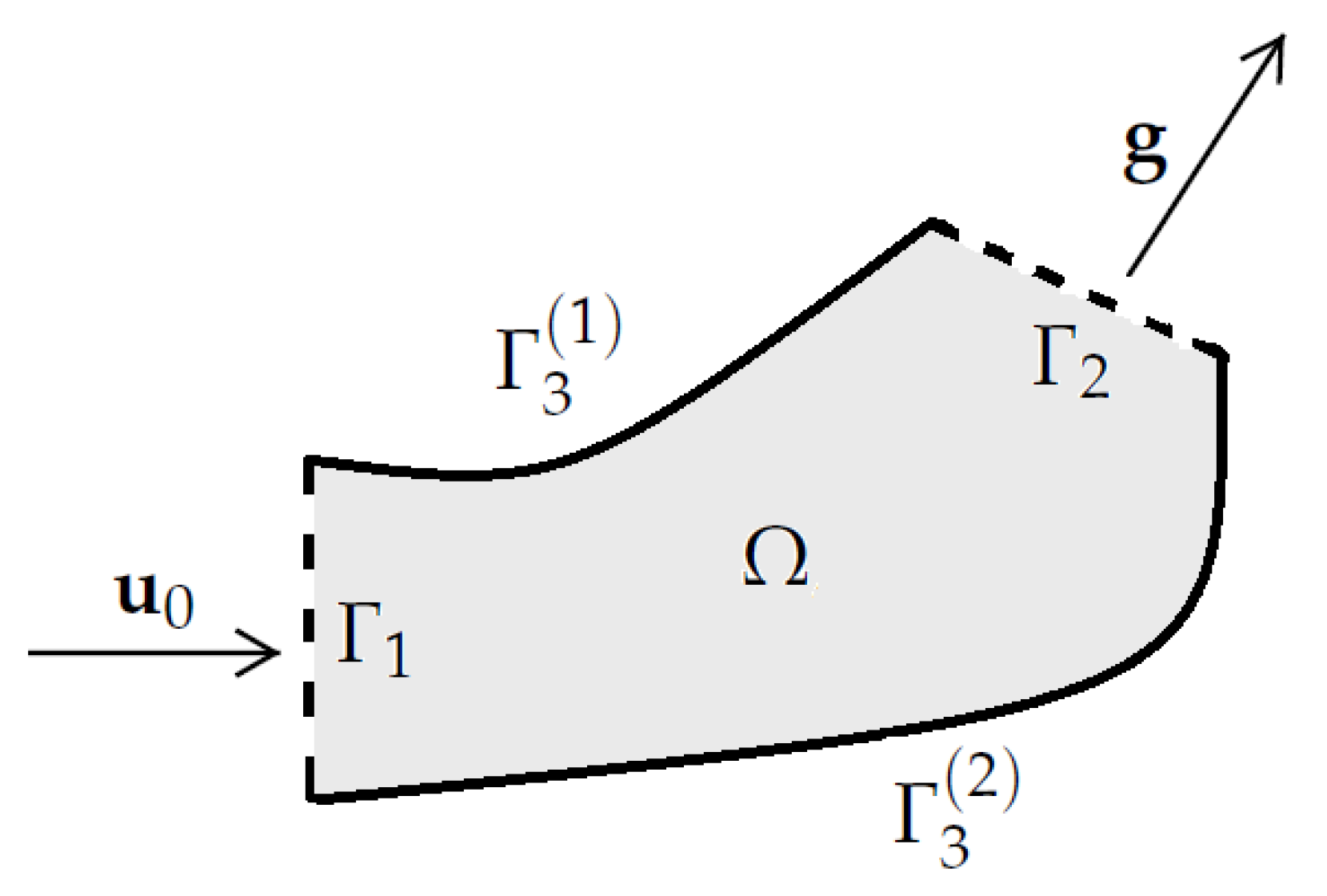
In order to describe boundary conditions for the velocity field and the density function in (
1), we divide the boundary in three open disjoint parts:
, where
and
are in-flow/out-flow parts and
is the lateral part (solid walls) of the boundary. Then, we impose the following boundary conditions:
The functions and are defined on and describe a Dirichlet boundary condition. The function describes a Dirichlet boundary control for on and belongs to a closed convex set .
Additionally, we assume the following:
where
denotes the length of the curve
and
is the outward unit normal vector to the curve
. Observe that condition (
5) implies that
is either a part of the boundary where the fluid flows outward or a part where the fluid flows inward.
An example of the flow domain
is given in
Figure 1.
Finally, on the part
we impose the impermeability condition and the Navier slip condition:
The term
is the tangential component of the vector
; that is,
For the sake of brevity, the nonhomogeneous Stokes system (
1) with mixed boundary conditions (
2), (
3), (
6) will be referred to as problem NS-MBC in what follows.
The Navier slip boundary condition was proposed by Navier [
1]; it is based on a balance between the fluid velocity tangent to the surface and the rate of strain at the boundary, i.e., the tangential component of the viscous stress at the boundary should be proportional to the tangential velocity. The components of the normal velocity to the surface is naturally zero, as mass cannot penetrate an impermeable solid surface. This type of boundary condition is involved when one studies boundary layer problems, such as in channels or Couette flows and is well justified by Jäger-Mikelić [
2,
3]. In addition, the real number
is the friction coefficient, which measures the tendency of the fluid to slip on the part
. When
, the fluid slips on
without friction and there are no boundary layers, while if
goes to
, then the friction is so intense that the fluid is almost at rest near the boundary [
4] (see also [
5]). Thus, from the physical point of view, boundary conditions (
6) make more sense than the classical Dirichlet boundary conditions.
Moreover, in order to define a correct variational formulation (weak solutions concept) of problem NS-MBC, the classical Green identities are not applicable in this case. The above leads us to study other results of integration by parts (see Lemma 1, below). Additionally, in order to correctly control the
-norm in terms of the
-norm of the deformation rate tensor, i.e., the norm
, we must employ the Korn inequality (see [
6], p. 52), which is not usual.
Some examples of flow phenomena that might require the introduction of a Navier slip boundary condition have been presented by Fujita [
7,
8], namely: a drainage or canal in which its bottom is covered with a layer of mud and pebbles; the blood flow in the vein of a patient suffering from arterial sclerosis; an avalanche of water and rocks; a flow of iron coming out of a smelting. Some other applications can be consulted in [
9,
10,
11].
It is well known that fluids in which the density and viscosity are variable have several important applications, both in natural phenomena as well as in industry. These fluids present a wider range of interesting phenomena, compared to fluids with constant density and viscosity (also called homogeneous fluids), and there are several mathematical models that describe different physical situations. In particular, some examples of the physical modeling of mixtures of incompressible fluids can be found in [
12] and the respective mathematical analysis of these models were developed in [
13,
14,
15]. We emphasize that all these works only consider fluids with constant viscosity and Dirichlet boundary conditions. Furthermore, as far as we know, there are no previous studies on the existence of weak solutions of problem NS-MBC, and analyses of optimal control problems have not been carried out either.
The above motivates the analysis of problem NS-MBC. The main mathematical difficulty that arises in the study of this problem in relation to the Stokes system with variable density and viscosity is due to several nonlinearities in the problem (
,
in Equation (
1)
1 and
in Equation (
1)
2), which, due to the product with the unknown density and viscosity, are much harder to deal with than the corresponding terms ones appearing in the Stokes equations in which the density and viscosity are known constants. Moreover, since the nonlinearity of the term
is not related to a monotone operator, we must work with arguments that are different than what is typical when dealing with elliptic or parabolic problems and nonlinearities and restrictions related to monotone operators. To overcome these difficulties, we will use the stream formulation presented by Frolov [
16] that is, the fluid density is represented in terms of its stream function through another function determined by the boundary conditions. This representation allows us to drop the continuity equation, which facilitates the introduction of the weak solution concept of problem NS-MBC. The stream formulation was used in [
17,
18,
19,
20,
21].
The purpose of this work is to study an optimal control problem related to weak solutions of problem NS-MBC. We would like to point out that the literature to the mathematical analysis of optimal control problems associated with systems of partial differential equations modeling the motion of viscous incompressible fluids with variable density and viscosity is scarce. The main difficulty lies in the mathematical handling. In fact, the systems that model the behavior of viscous and incompressible fluids with constant density can have two types of character: either elliptical, for the steady state, or parabolic, for the non-stationary state. In both cases, when an approximation argument is used, such as the Galerkin method, for instance, higher-order estimates are usually obtained for the approximate solutions, which facilitates the passage to the limit in the nonlinear terms and, consequently, it is more simple to achieve the required results. On the other hand, for systems that model the motion of fluids with variable density, the equations that compose the system present nonlinearities that are more difficult to handle since they makes it impossible to obtain higher-order estimates and make it difficult to pass to the limit in the nonlinear terms. The system of equations that we have considered in our work (problem NS-MBC), the first equation of system (
1) has an elliptic character but is coupled with a first-order transport equation for the density
(see Equation (
1)
1), which gives a hyperbolic character to the model. These drawbacks make it difficult to obtain estimates with high regularity and increase the difficulties in passing to the limit.
Let us mention the available literature on the analysis of optimal control problems for nonhomogeneous fluid flows. The beginning of the study of such problems dates back to the paper of Illarionov [
17]. He investigated optimal boundary control for a model of 2D steady-state flows of a nonhomogeneous incompressible fluid under the assumption that the viscosity
is constant. Using the external forces field as a control function, Mallea-Zepeda et al. [
19] proved the existence of optimal solutions to this model and obtained the first-order necessary optimality conditions. Boundary control for a 2D stationary system of micropolar fluid with variable density was studied in [
20]. Certain classes of optimal control problems for the 2D Boussinesq equations with variable density and constant viscosity are analyzed in [
21].
We also mention that there is a large number of mathematical works devoted to the study of optimal control problems for PDEs describing flows of a homogeneous fluid (see, for example, refs. [
22,
23,
24,
25,
26] and the numerous references therein). Such problems are currently fairly well understood, while control and optimization problems for nonhomogeneous fluid flows remain a serious challenge. Motivated by this fact, we performed our study, which can be considered a starting point for future investigations of non-Newtonian fluid models, where more general inhomogeneities can be analyzed.
The outline of the present paper is as follows: In
Section 2, we fix the notation, introduce the function spaces to be used and establish the concept of weak solutions of problem NS-MBC, using the stream formulation. In
Section 3, we prove the existence and uniqueness of weak solutions of system NS-MBC, in order to establish that the admissible solutions set is nonempty (see (
39) below). In
Section 4, we introduce the optimal control problem to this system and prove the existence of global optimal solutions. Moreover, using a Lagrange multipliers theorem in Banach spaces, we derive an optimality system, and, establishing a coercivity condition for the Lagrangian function, we obtain a second-order sufficient optimality condition. Finally, we show that the marginal function related to this control system is lower semi-continuous with respect to the one-sided Hausdorff distance.
For the reader’s convenience, in
Appendix A (see
Table A1), we collect the main symbols used in this paper and explain their meaning.
4. Optimal Control Problem
In this section, we give the statement of the control problem under study. Then, we prove the existence of at least one global optimal solution. Using a Lagrange multipliers result on the existence of Lagrange multipliers theorem in Banach spaces, we derive an optimality system and a second-order sufficient optimality condition. In addition, we show that the marginal function related to this control system (see problem (
38) below) is lower semi-continuous with respect to the one-sided Hausdorff distance.
Let us consider sets
and
such that
Moreover, assume the following:
Note that from the inclusion it follows that the set is convex and closed in the space .
We consider a vector function
describing a distributed control for the motion equations in
and a vector function
describing a boundary control for
on
. For simplicity, we use the product
, and we introduce a cost functional
by the following formula:
where
and
are nonnegative real constants, and
Examples of weakly lower semi-continuous functionals, interesting from the physical point of view, are as follows:
where
. The functional
describes the deviation of the flow velocity
from a given desired vector field
. The functional
measures the vorticity of the velocity field
. The functional
describes the total resistance in a fluid due to viscous friction (see [
17,
31]).
The constants
and
, given in (
35), measure the cost of the control. Assume that at least one of the following two conditions holds:
Thus, we define the following constrained minimization problem for system (
14):
The set of admissible solutions of control problem (
38) is defined by
Related to problem (
38), we have the following definitions.
Definition 2 (Global optimal solution)
. A triplet is called a global optimal solution of control problem (38) if By
we denote the set of all global optimal solutions to control problem (
38).
Definition 3 (Local optimal solution).
A triplet is called a local optimal solution of control problem (38) if there exists such that for all satisfyingone has that 4.1. Existence of Global Optimal Solutions
In this subsection, we will prove the solvability of optimization problem (
38).
Theorem 3 (Existence of optimal solutions)
. Under the assumptions of Theorem 1, suppose that conditions (33), (34) and (36) hold. Moreover, suppose that at least one of conditions (i) and (ii) given in (37) is satisfied. Then, optimal control problem (38) has at least one global optimal solution in the sense of Definition 2. Proof. From Theorem 1 it follows that
Since the functional
is bounded from below, we see that there exists a minimizing sequence
such that
Moreover, if at least one of the conditions given in (
37) is satisfied, then there exists a positive constant
C such that
On the other hand, by definition of the set
, for each
, the sequence
satisfies system (
14); thus, from estimate (
27) we have that there exists a constant
, independent of
m, such that
Therefore, using estimates (
41) and (
42) and the fact that the admissible controls set
is closed and convex (in particular, is weakly closed in the space
), we deduce that there exist a triplet
and a subsequence of
, still denoted by
, such that the following convergences hold as
:
Since
on
and
on
, from (
43) it follows that
on
,
on
and
on
. Thus, we deduce that the triplet
satisfies the boundary conditions given in (
14).
Next, we observe that for all
the following estimate holds:
where
Since the operator
is continuous and the injection of
in
is compact, we have
Using (
43)
2 and (
45), we derive from (
44) the following:
Then, the convergences (
43) and (
46) allow us pass to the limit in system (
14) written by
, as
m goes to
; thus we obtain that
is a solution of (
14). Consequently, the triplet
belongs to the set
and
On the other hand, since the functional
is weakly lower semi-continuous, we have
which, together with (
47), imply (
40). Thus, control problem (
38) has at least one global optimal solution. ☐
4.2. Optimality System and Second-Order Sufficient Optimality Condition
In this subsection, we derive an optimality system for optimal control problem (
38) and establish a second-order sufficient optimality condition.
In order to obtain first-order necessary optimality conditions and derive an optimality system for local optimal solutions of control problem (
38), we reformulate this problem in the abstract context given by Zowe and Kurcyusz [
32]. The method for obtaining first-order necessary optimality conditions, provided by [
32], was also previously used in [
33,
34], among others.
In this way, we consider the Banach space
and the operator
, where
and
at each point
are defined by
Thus, optimal control problem (
38) can be reformulated as follows:
that is,
and
.
Notice that the set of admissible solutions of problem (
49) is
Remark 2. For simplicity, in what follows we carry out our study taking the following:Then, for problem (38), the cost functional is Thus, we can easily deduce the following results concerning to the differentiability of the functional and the operator .
Lemma 4. The functional is Fréchet differentiable and the Fréchet derivative of at the point in the direction is given by Lemma 5. Let . The operator is continuously Fréchet-differentiable and the Fréchet derivative of at the point in the direction is the linear operator , whereand the linear operator is defined by Following [
32], we say that
is a
regular point for problem (
49) if for each pair
there exists an element
such that
where
is the conical hull of
in
.
Lemma 6. Suppose that ; then is a regular point.
Proof. Since the pair
belongs to
, we deduce that it is sufficient to prove the existence of
satisfying the following system
The existence of
satisfying (
51) can be obtained by arguing similarly as in the proof of Theorem 1. ☐
Now, we prove the existence of Lagrange multipliers for problem (
49); thereafter, we derive an optimality system.
Theorem 4. Let be a local optimal solution of problem (49) and assume that . Then, there exist Lagrange multipliers such that the following variational inequality holds:for all . Proof. Since
, we deduce from Lemma 6 that
is a regular point for problem (
49). Therefore, from [
32] (see Theorem 3.1), it follows that there exist Lagrange multipliers
such that
for all
Thus, the proof follows from Lemmas 4 and 5. ☐
Corollary 1 (Optimality system)
. Let be a local optimal solution of control problem (49). Then the Lagrange multipliers , obtained in Theorem 4, satisfy the following weak formulationand the optimality conditions: Proof. From (
52), setting
, and taking into account that
is a vector space, we obtain (
53).
Now, setting
in (
52), we have
Then, choosing
(which belongs to
, for all
) in the last inequality, we obtain (
54).
Finally, taking
in (
52), we obtain
Therefore, choosing
in (
56), we arrive at (
55). ☐
Remark 3. Suppose and are strictly positive. Then, taking into account that is a closed convex set, from optimality conditions (54) and (55) and a well-known theorem on the projection onto a closed convex set (see, for example, ref. [35], Chap. 5, Theorem 5.2), we derive the following: Finally, we establish a second-order sufficient optimality condition for control problem (
49) via the derivation of an
-coercivity condition on the second derivative of the Lagrangian function, which assures that an admissible solution
is a local optimal solution.
We observe that the Lagrangian
related to optimal control problem (
49) is given by
where the operators
and
are defined in (
48) and the functional
is given in (
50).
Lemma 7. Let be a local optimal solution of problem (49) and assume that . If the constant is sufficiently large such thatwhere C is a positive constant depends only on Ω. Then, the Lagrange multiplier λ, provided by Theorem 4, satisfies the following inequalitywith . Proof. Taking
in (
53), we have
Applying the Hölder and Young inequalities and Sobolev embeddings and taking into account that the operator
N is continuous, we obtain
Then, using (
60)–(
62), we derive from (
59) the following estimate:
From hypothesis (
57), it follows that
. Thus, the result follows from (
63). ☐
In the following result, we establish a second-order sufficient condition for optimal control problem (
49).
Theorem 5 (Second-order sufficient optimality condition)
. Let be an admissible solution of problem (49). Suppose thatwherethe constants γ and K are defined in Lemma 7, and with the Korn constant (cf. [6], p. 52). Then, there exists a positive constant such thatConsequently, is a local optimal solution of control problem (49). Proof. Let
. Notice that the Lagrangian
related to control problem (
49) is twice Fréchet-differentiable, and the second derivative of
at the admissible solution
in the directions
is given by
Using the Hölder inequality, Sobolev embeddings and the continuity of the operator
N, we derive
Furthermore, from the Korn inequality (see [
6], p. 52) it follows that there exists a constant
such that
Taking into account (
65) and (
66), we deduce from (
64) the following estimate:
Next, from (
58) we derive
which, together with (
67), imply
Then, using the inequality
we obtain
and hence,
In particular, if
with
, then from [
36] we conclude that the triplet
is a local optimal solution of control problem (
49). ☐
4.3. Marginal Function
In the studying of optimal solutions, it is important to investigate the case when the collection of all admissible controls (in our problem, the set
) can be expanded/reduced. Following the ideas developed in [
37,
38,
39], we introduce the concept of the marginal function, which shows how the minimal value of the cost functional
changes under a variation of the set
.
Definition 4 (Marginal function)
. By the marginal function of control system (38), we mean the function defined as follows: Theorem 6 (Lower semi-continuity of the marginal function)
. The marginal function Φ is lower semi-continuous in the following sense: iffor any , andthen Proof. The proof is by contradiction. Saying that (
69) is not true amounts to saying that there exists a convergent subsequence
such that
By Theorem 3, it follows that
Let us consider a sequence
such that
We obviously have
Let us show that the sequence
is bounded in the space
. Assuming that
is an arbitrary element of the set
, we obtain
whence
for any
. Therefore, we have
Arguing in a similar manner, it can be shown that the sequence
is bounded in the space
. Moreover, taking into account estimate (
27), we deduce that the sequence
is bounded in the space
. Therefore, without loss of generality, it can be assumed that
for some triplet
.
In view of (
68), there exist sequences
and
such that
From (
72)
2,3 and (
73) it follows that
Since
and
, the sets
and
are weakly closed, respectively, in
and
. Therefore, from (
74) we deduce that the inclusions
and
hold. Moreover, applying the limit passage procedure as in
Section 4.1, it can be shown that the triplet
belongs to the set
. This implies the following:
Taking into account (
71), (
72), and (
75), we obtain
This contradicts (
70). Thus, Theorem 6 is proved. ☐


 ,
, 
{kind=link}
